Design of Entry Detection Method for Top-Bounded Spaces Using GPS SNR and Spatial Characteristics for Seamless Positioning in Logistics Facilities

Abstract
1. Introduction
2. Related Work
2.1. IO Detection Method
2.2. Seamless Positioning Method Considering TBS
2.3. LOS/NLOS Detection Method Using GNSS SNR
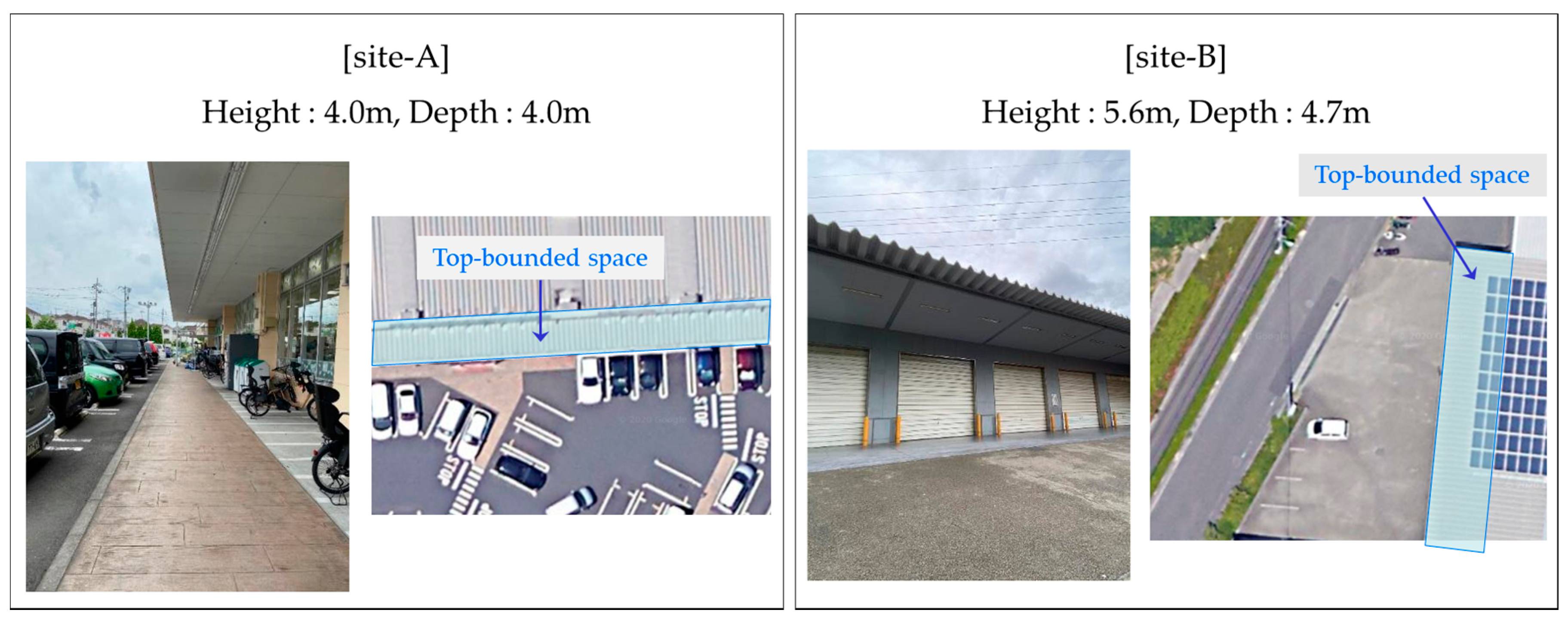
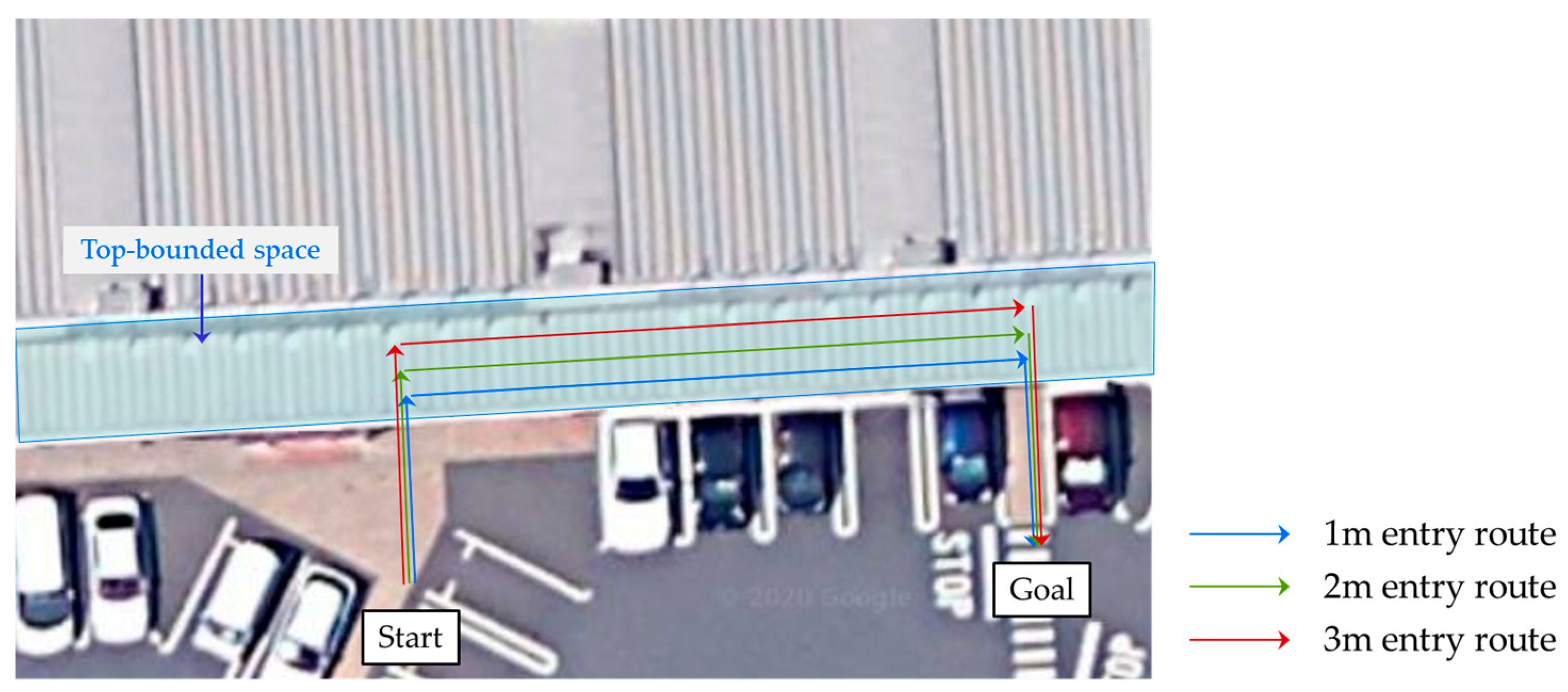
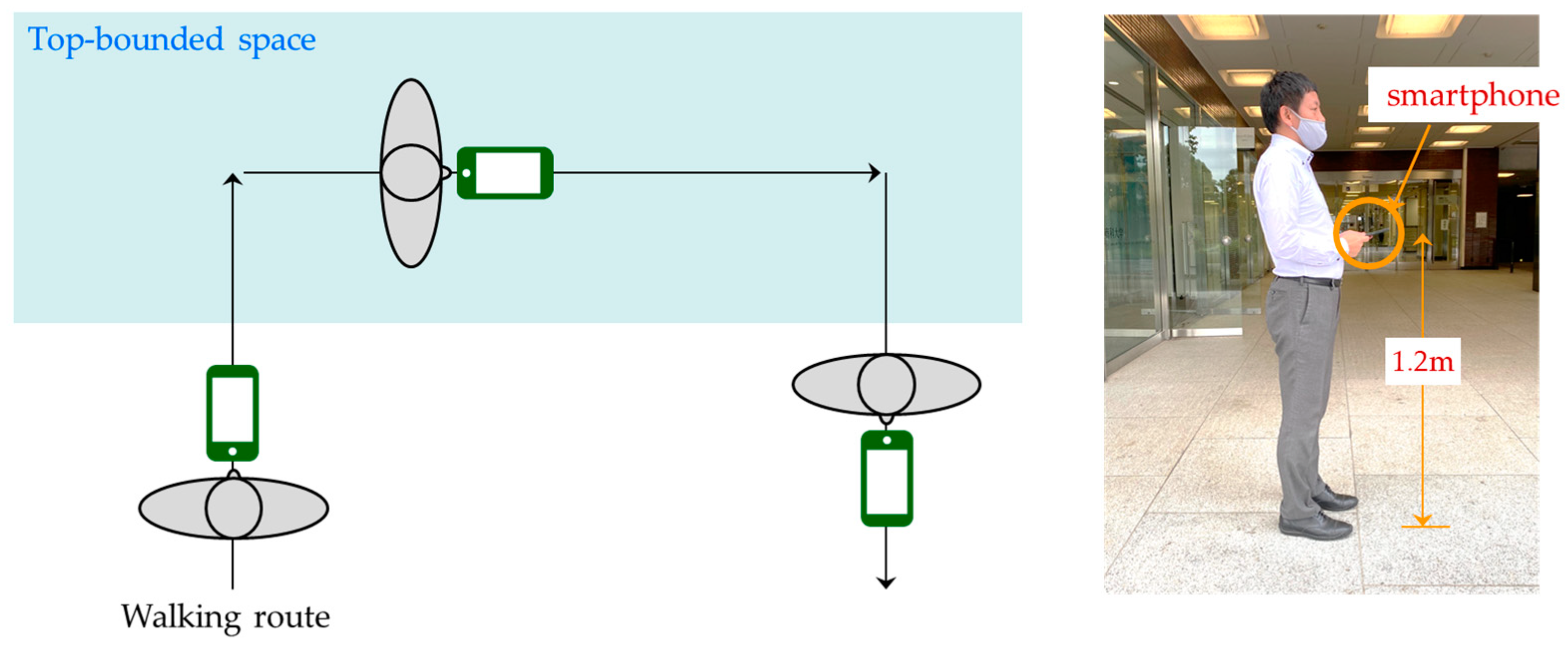
3. Preliminary Experiments
3.1. Overview of Preliminary Experiments
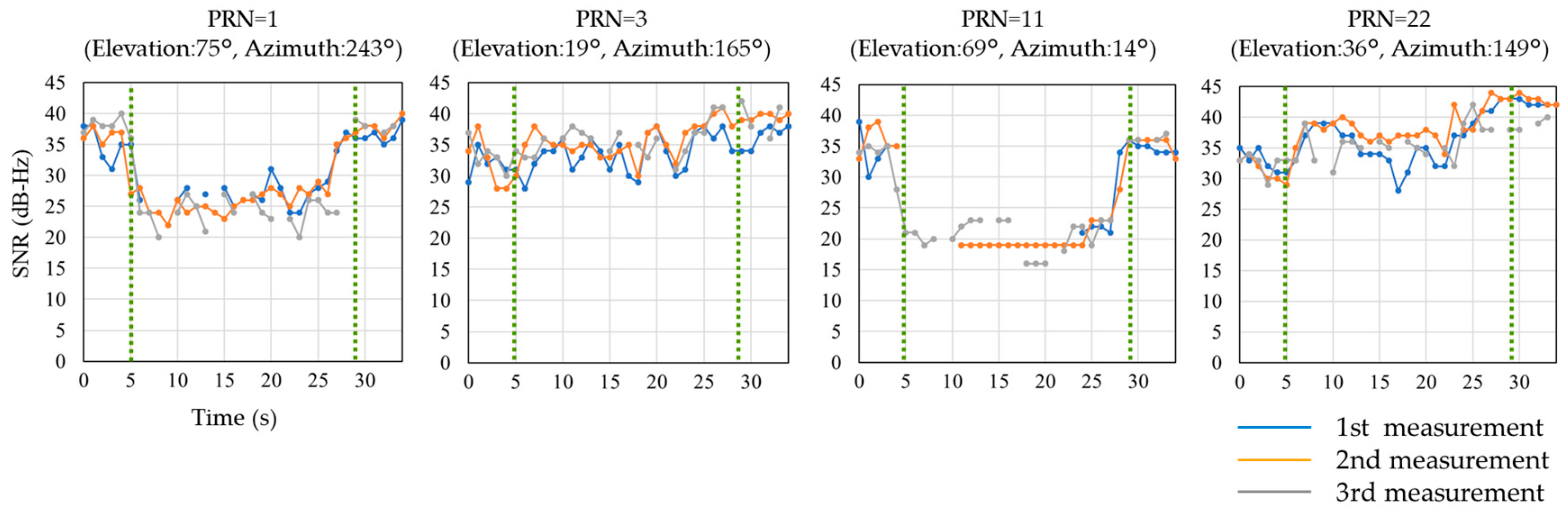
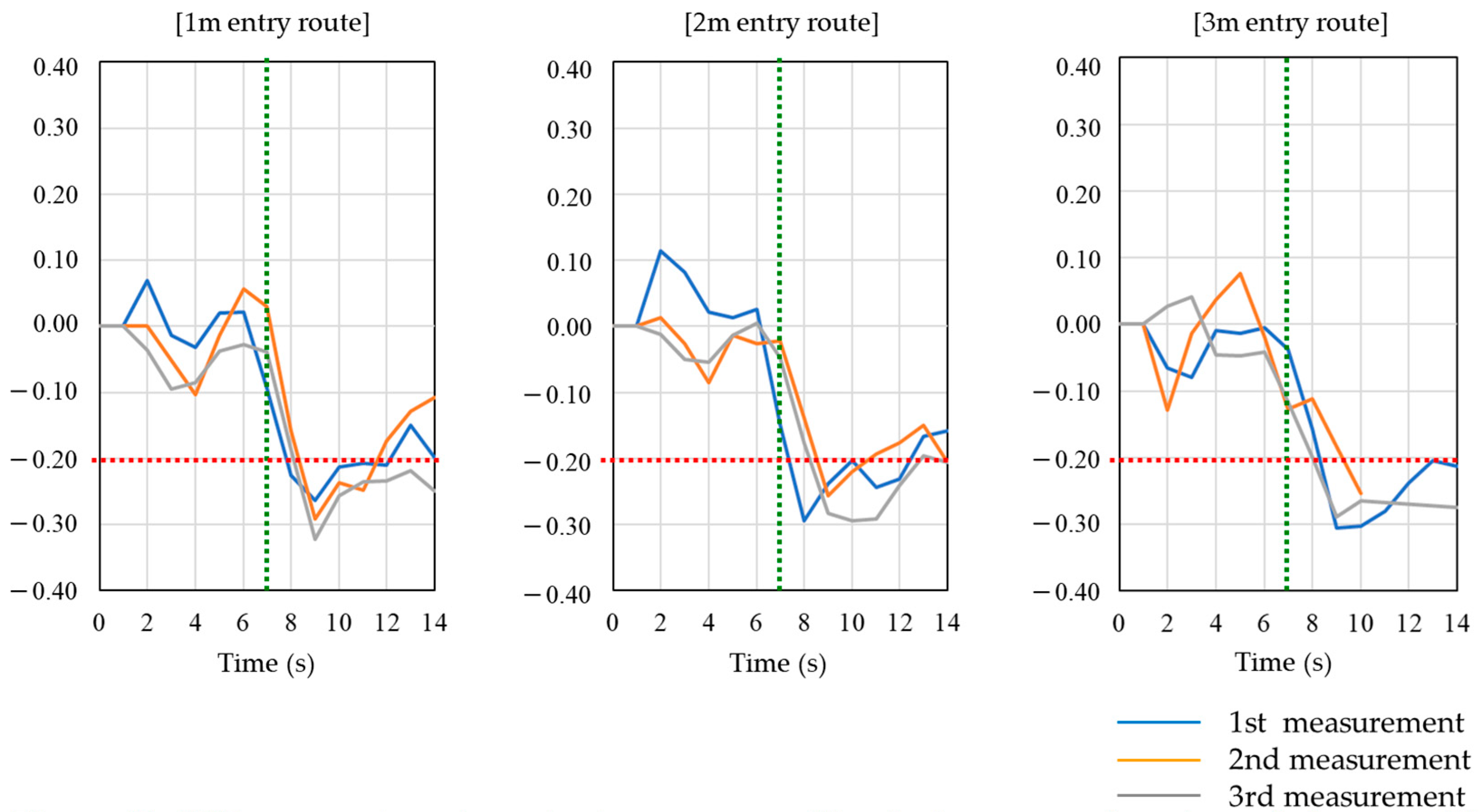
3.2. Preliminary Experiment Result
4. Design of TBS Entry Detection Method Using GPS SNR and Spatial Characteristics
4.1. Overview of Proposed Method
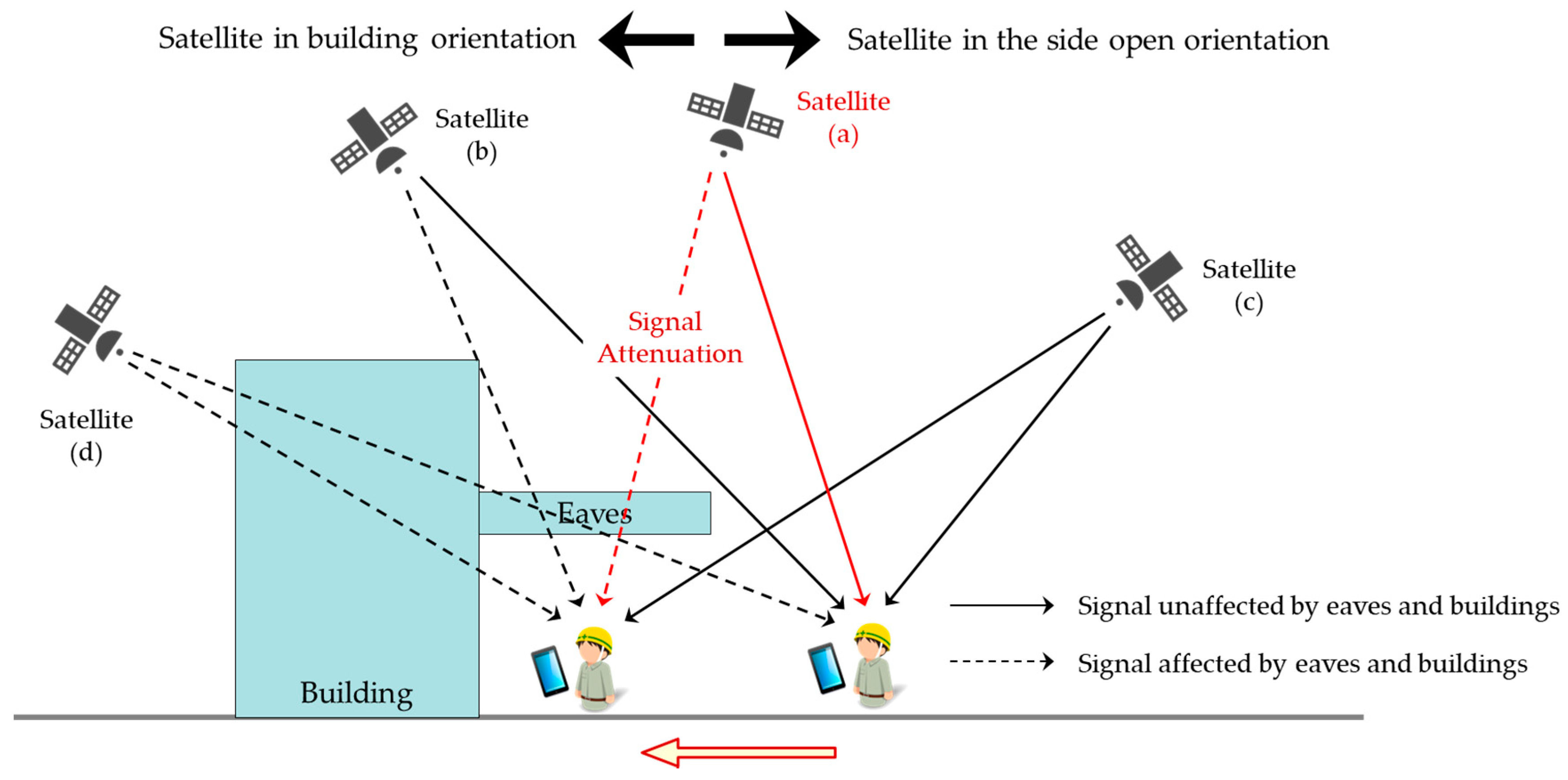
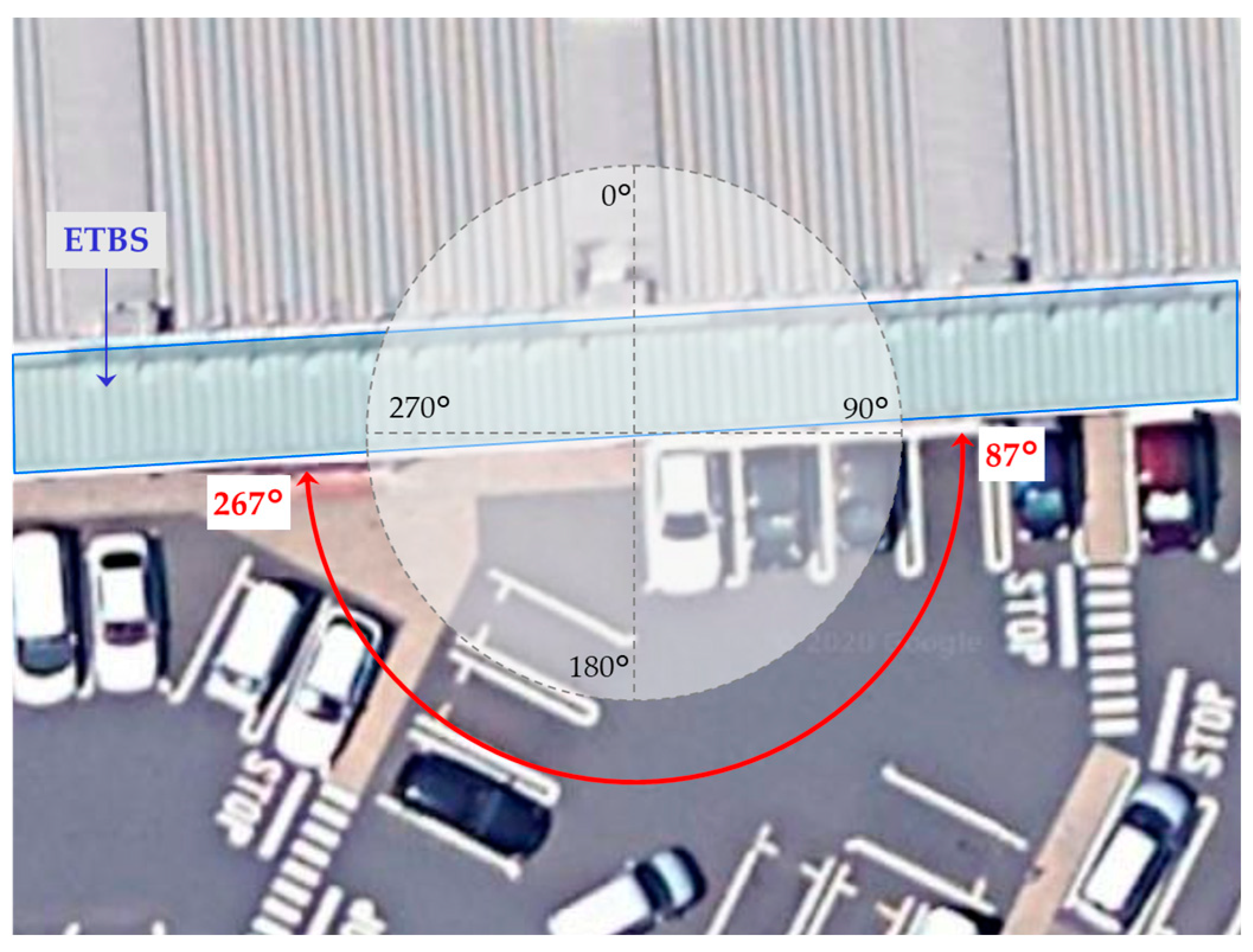
4.2. Calculation of Entry Angle Thresholds and Classification of Satellites Using Spatial Characteristics
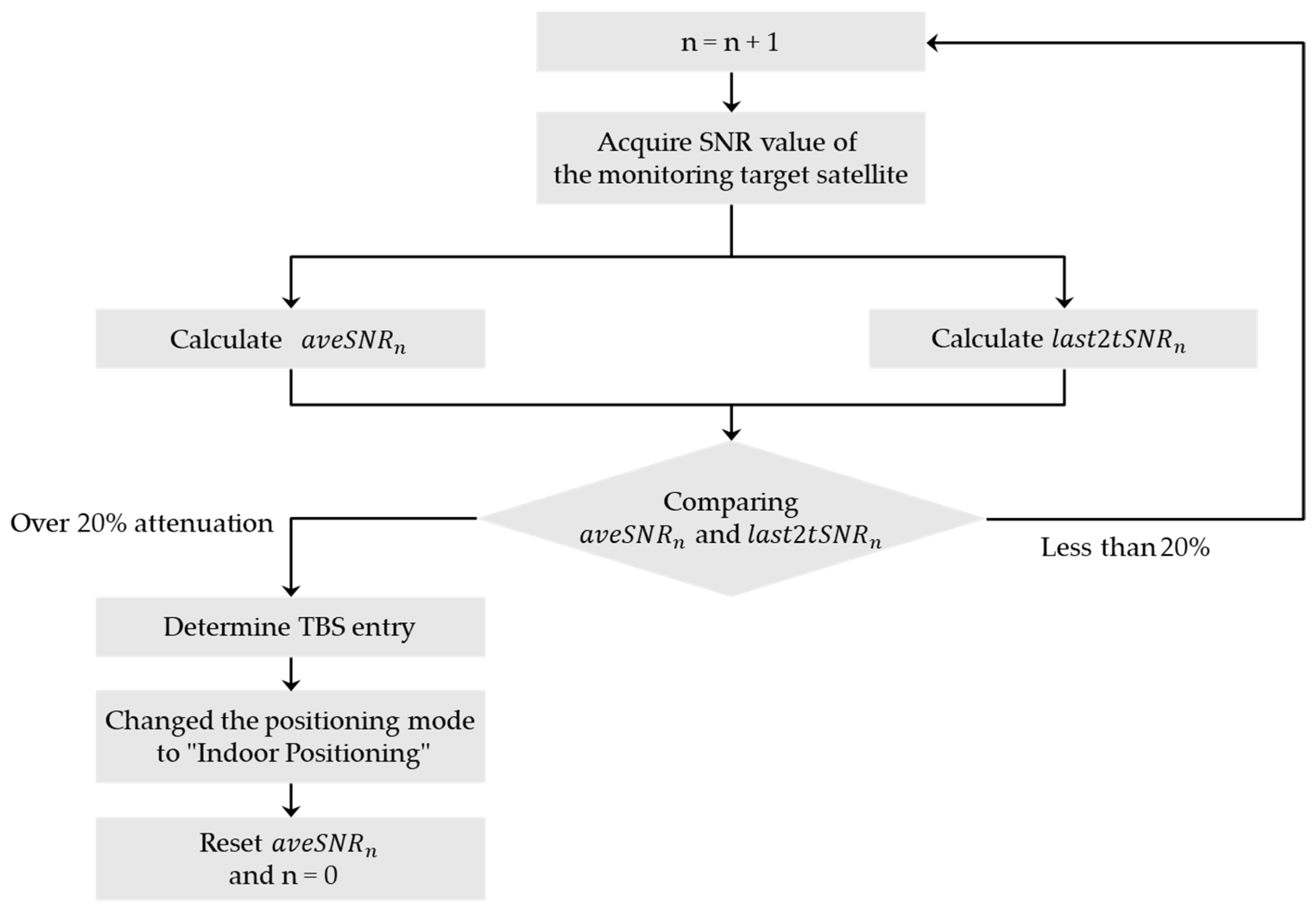
4.3. Detection of Entry into TBS Using SNR Attenuation
5. Evaluation
5.1. Evaluation of Detection Accuracy of TBS Stay
5.2. Evaluation of Differences in Detection Accuracy by Receiving Devices
6. Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutor. 2016, 21, 2568–2599. [Google Scholar] [CrossRef]
- iBeacon for Developers. Available online: https://developer.apple.com/ibeacon/ (accessed on 10 October 2020).
- Ruiz, A.R.J.; Granja, F.S. Comparing Ubisense, BeSpoon, and DecaWave UWB Location Systems: Indoor Performance Analysis. IEEE Trans. Instrum. Meas. 2017, 66, 2106–2117. [Google Scholar] [CrossRef]
- Van der Ham, M.F.S.; Zlatanova, S.; Verbree, E.; Voute, R. Real time localization of assets in hospitals using quuppa indoor positioning technology. In Proceedings of the First International Conference on Smart Data and Smart Cities (30th UDMS), Split, Croatia, 7–9 September 2016; pp. 105–110. [Google Scholar]
- Use of Bluetooth Beacon Technology in Smart Airport. Available online: https://www.amarinfotech.com/use-of-bluetooth-beacon-technology-in-smart-airport.html (accessed on 10 October 2020).
- Spachos, P.; Plataniotis, K.N. BLE Beacons for Indoor Positioning at an Interactive IoT-Based Smart Museum. IEEE Syst. J. 2020, 14, 3483–3493. [Google Scholar] [CrossRef]
- Park, J.; Chen, J.; Cho, Y.K. Self-corrective knowledge-based hybrid tracking system using BIM and multimodal sensors. Adv. Eng. Inform. 2017, 32, 126–138. [Google Scholar] [CrossRef]
- Sun, E.; Ma, R. The UWB based forklift trucks indoor positioning and safety management system. In Proceedings of the 2017 IEEE 2nd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 25–26 March 2017; pp. 86–90. [Google Scholar]
- 2020 Bluetooth Market Update. Available online: https://www.bluetooth.com/bluetooth-resources/2020-bmu/ (accessed on 10 October 2020).
- Lin, C.-Y.; Cheng, W.-T.; Wang, S.-C. An End-to-End Logistics Management Application over Heterogeneous Location Systems. Wirel. Pers. Commun. 2010, 59, 5–16. [Google Scholar] [CrossRef]
- Yan, J.; Diakité, A.A.; Zlatanova, S. An extraction approach of the top-bounded space formed by buildings for pedestrian navigation. ISPRS Ann. Photogramm. Remote. Sens. Spat. Inf. Sci. 2018, 4, 247–254. [Google Scholar] [CrossRef]
- Feriol, F.; Vivet, D.; Watanabe, Y. A Review of Environmental Context Detection for Navigation Based on Multiple Sensors. Sensors 2020, 20, 4532. [Google Scholar] [CrossRef] [PubMed]
- Zou, H.; Jiang, H.; Luo, Y.; Zhu, J.; Lu, X.; Xie, L. Bluedetect: An ibeacon-enabled scheme for accurate and energy-efficient indoor-outdoor detection and seamless location-based service. Sensors 2016, 16, 268. [Google Scholar] [CrossRef] [PubMed]
- Gao, H.; Groves, P.D. Environmental Context Detection for Adaptive Navigation using GNSS Measurements from a Smartphone. Navig. J. Inst. Navig. 2018, 65, 99–116. [Google Scholar] [CrossRef]
- Gallagher, T.; Li, B.; Dempster, A.G.; Rizos, C. Power efficient indoor/outdoor positioning handover. In Proceedings of the 2nd International Conference on Indoor Positioning and Indoor Navigation (IPIN11), Guimarães, Portugal, 21–23 September 2011. [Google Scholar]
- Wang, W.; Chang, Q.; Li, Q.; Shi, Z.; Chen, W. Indoor-Outdoor Detection Using a Smart Phone Sensor. Sensors 2016, 16, 1563. [Google Scholar] [CrossRef] [PubMed]
- Zhou, P.; Zheng, Y.; Li, Z.; Li, M.; Shen, G. Iodetector: A generic service for indoor outdoor detection. In Proceedings of the 10th ACM Conference on Embedded Network Sensor Systems, Toronto, ON, Canada, 6–9 November 2012; pp. 113–126. [Google Scholar]
- Radu, V.; Katsikouli, P.; Sarkar, R.; Marina, M.K. A semi-supervised learning approach for robust indoor-outdoor detection with smartphones. In Proceedings of the 12th ACM conference on Embedded Network Sensor Systems, Memphis, TN, USA, 3–6 November 2014; pp. 280–294. [Google Scholar]
- Kim, Y.; Lee, S.; Lee, S.; Cha, H. A GPS Sensing Strategy for Accurate and Energy-Efficient Outdoor-to-Indoor Handover in Seamless Localization Systems. Mob. Inf. Syst. 2012, 8, 315–332. [Google Scholar] [CrossRef]
- Zhang, J.; Fu, X.; Yang, F.; Liu, Q.; Deng, Z.; Liu, W. Research on indoor/outdoor state switching based on smart phone and GNSS satellite status information. In Proceedings of the 2019 IEEE 2nd International Conference on Automation, Electronics and Electrical Engineering (AUTEEE), Shenyang, China, 22–24 November 2019; pp. 524–529. [Google Scholar]
- Zhu, Y.; Luo, H.; Wang, Q.; Zhao, F.; Ning, B.; Ke, Q.; Zhang, C. A Fast Indoor/Outdoor Transition Detection Algorithm Based on Machine Learning. Sensors 2019, 19, 786. [Google Scholar] [CrossRef] [PubMed]
- Zlatanova, S.; Yan, J.; Wang, Y.; Diakité, A.A.; Isikdag, U.; Sithole, G.; Barton, J. Spaces in Spatial Science and Urban Applications—State of the Art Review. ISPRS Int. J. Geo-Inf. 2020, 9, 58. [Google Scholar] [CrossRef]
- Seco-Granados, G.; Lopez-Salcedo, J.; Jimenez-Banos, D.; Lopez-Risueno, G. Challenges in Indoor Global Navigation Satellite Systems: Unveiling its core features in signal processing. IEEE Signal Process. Mag. 2012, 29, 108–131. [Google Scholar] [CrossRef]
- Wang, L.; Groves, P.D.; Ziebart, M.K. Smartphone Shadow Matching for Better Cross-street GNSS Positioning in Urban Environments. J. Navig. 2014, 68, 411–433. [Google Scholar] [CrossRef]
- OpenGIS City Geography Markup Language (CityGML) Encoding Standard, Version 2.0.0. 2012. Available online: http://www.opengis.net/spec/citygml/2.0 (accessed on 10 October 2020).
- Zaminpardaz, S.; Wang, K.; Teunissen, P.J.G. Australia-first high-precision positioning results with new Japanese QZSS regional satellite system. GPS Solut. 2018, 22, 101. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classification Group | Whether Elevation Angle Is Higher than Entry Angle Threshold | Whether Satellite Is in Side Opening Orientation |
|---|---|---|
| A | Yes | Yes |
| B | Yes | No |
| C | No | Yes |
| D | No | No |
| Number of Measurements | SNR Attenuation Rate of Monitoring Target Satellite | |||
|---|---|---|---|---|
| 36 | Average | Median | Maximum | Minimum |
| −26.32% | −25.45% | −39.10% | −20.50% | |
| Route | Number of Times | Existing Method in [13] | Proposed Method | ||||
|---|---|---|---|---|---|---|---|
| Percentage of Correct Detections | Number of Measurements Correctly Detected More than 50% of the Time per Measurement | Percentage of Correct Detections | Number of Measurements Correctly Detected More than 50% of the Time per Measurement | ||||
| 1 m entry | 18 | 27.1% | 5 | 27.8% | 52.3% | 10 | 55.6% |
| 2 m entry | 18 | 43.9% | 7 | 38.9% | 60.0% | 14 | 77.8% |
| 3 m entry | 12 | 35.9% | 2 | 16.7% | 85.8% | 12 | 100.0% |
| Total | 48 | 35.6% | 14 | 29.2% | 65.6% | 36 | 75.0% |
| Model A | Model B | ||||||
|---|---|---|---|---|---|---|---|
| Model Name | Fujitsu Arrows m04 | Google Pixel3a | |||||
| OS Version | Android 7.1.1 | Android 10 | |||||
| Route | Number of times | Percentage of correct detections | Number of measurements correctly detected more than 50% of the time per measurement | Percentage of correct detections | Number of measurements correctly detected more than 50% of the time per measurement | ||
| 1 m entry | 3 | 100.0% | 3 | 100.0% | 79.2% | 3 | 100.0% |
| 2 m entry | 3 | 33.3% | 1 | 33.3% | 69.2% | 3 | 100.0% |
| 3 m entry | 3 | 88.1% | 3 | 100.0% | 82.1% | 3 | 100.0% |
| Total | 9 | 73.9% | 7 | 77.8% | 76.9% | 9 | 100.0% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tabata, K.; Nakajima, M.; Kohtake, N. Design of Entry Detection Method for Top-Bounded Spaces Using GPS SNR and Spatial Characteristics for Seamless Positioning in Logistics Facilities. Sensors 2020, 20, 6864. https://doi.org/10.3390/s20236864
Tabata K, Nakajima M, Kohtake N. Design of Entry Detection Method for Top-Bounded Spaces Using GPS SNR and Spatial Characteristics for Seamless Positioning in Logistics Facilities. Sensors. 2020; 20(23):6864. https://doi.org/10.3390/s20236864
Chicago/Turabian StyleTabata, Kenichi, Madoka Nakajima, and Naohiko Kohtake. 2020. "Design of Entry Detection Method for Top-Bounded Spaces Using GPS SNR and Spatial Characteristics for Seamless Positioning in Logistics Facilities" Sensors 20, no. 23: 6864. https://doi.org/10.3390/s20236864
APA StyleTabata, K., Nakajima, M., & Kohtake, N. (2020). Design of Entry Detection Method for Top-Bounded Spaces Using GPS SNR and Spatial Characteristics for Seamless Positioning in Logistics Facilities. Sensors, 20(23), 6864. https://doi.org/10.3390/s20236864