Analysis of the Antenna Array Orientation Performance of the Interferometric Microwave Radiometer (IMR) Onboard the Chinese Ocean Salinity Satellite



Abstract
1. Introduction
2. Concepts and Methods
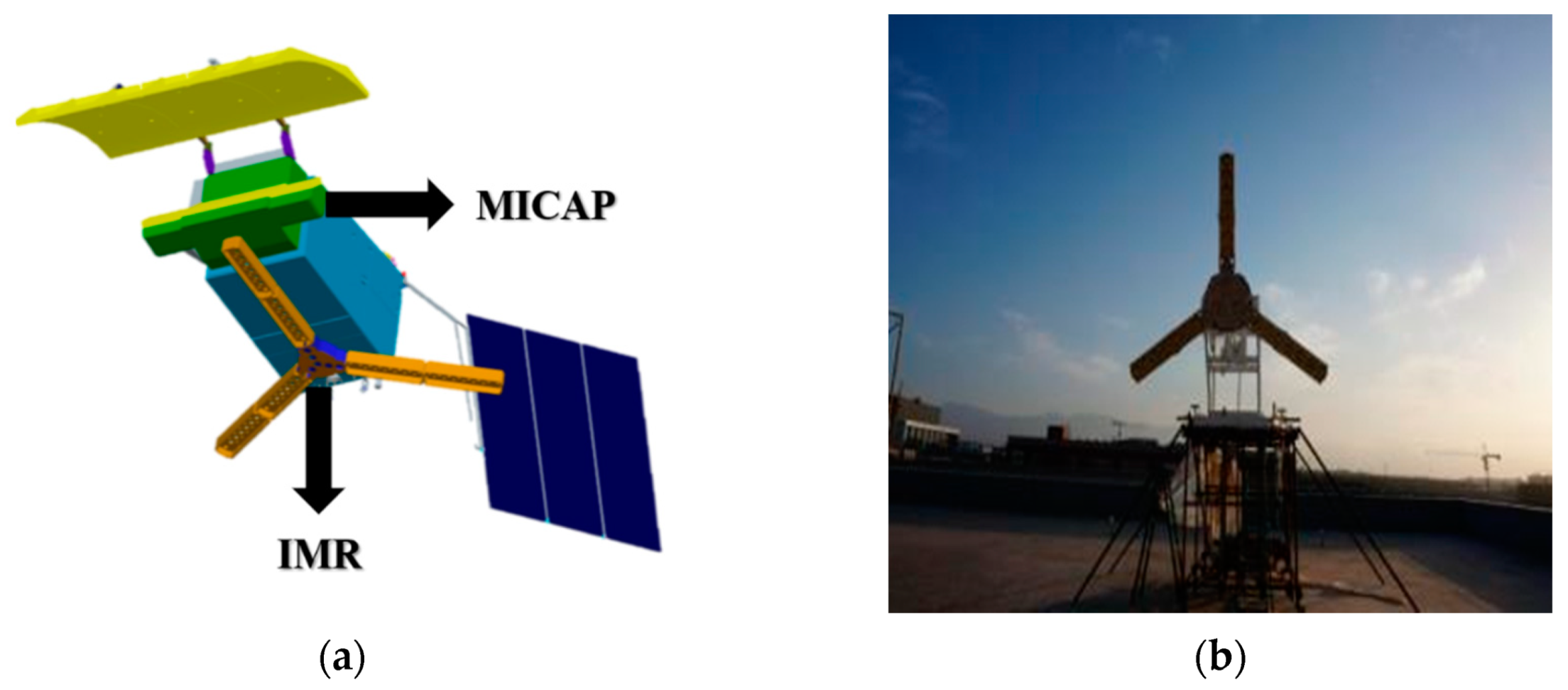
2.1. Payloads Onboard Chinese Ocean Salinity Satellite
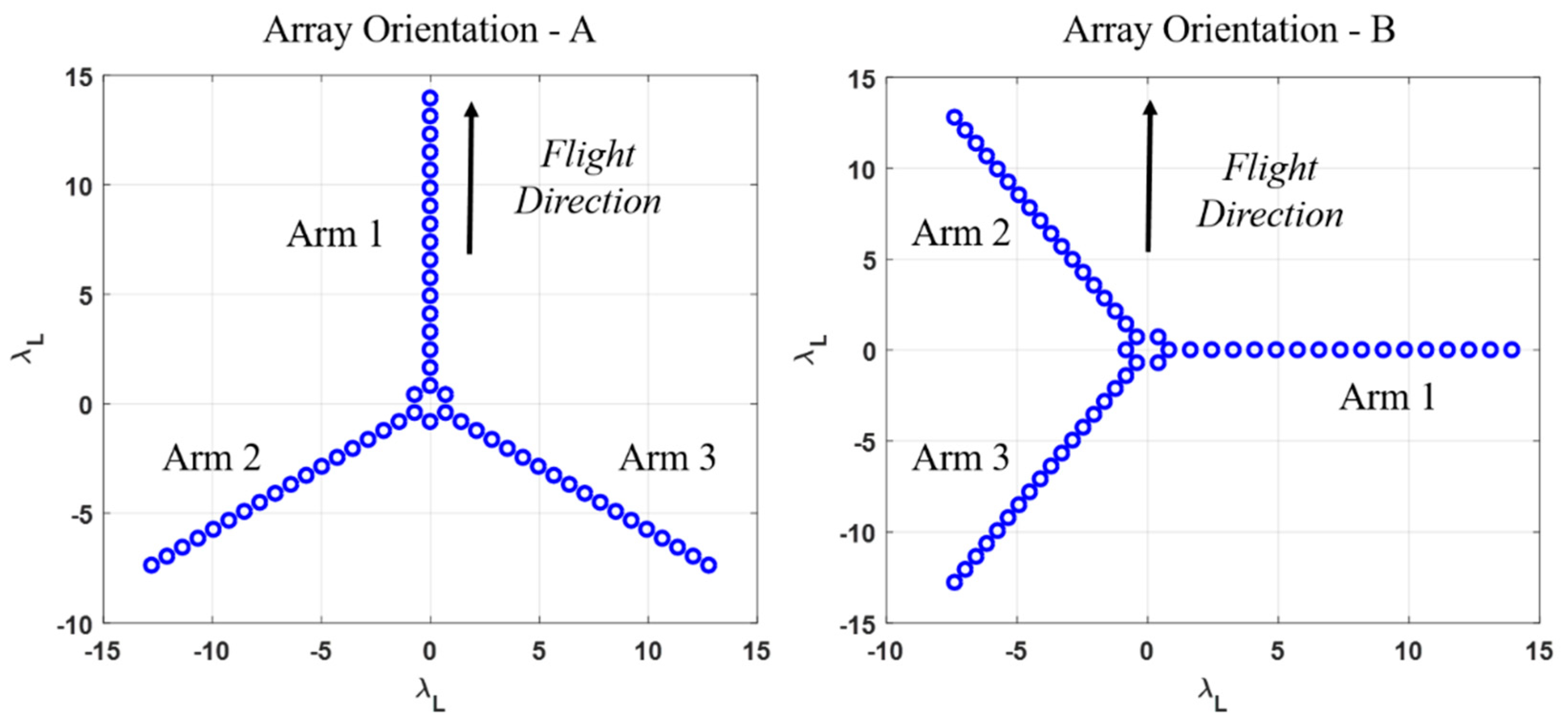
2.2. Interferometric Microwave Radiometer’s (IMR) Y-Shaped Antenna Array
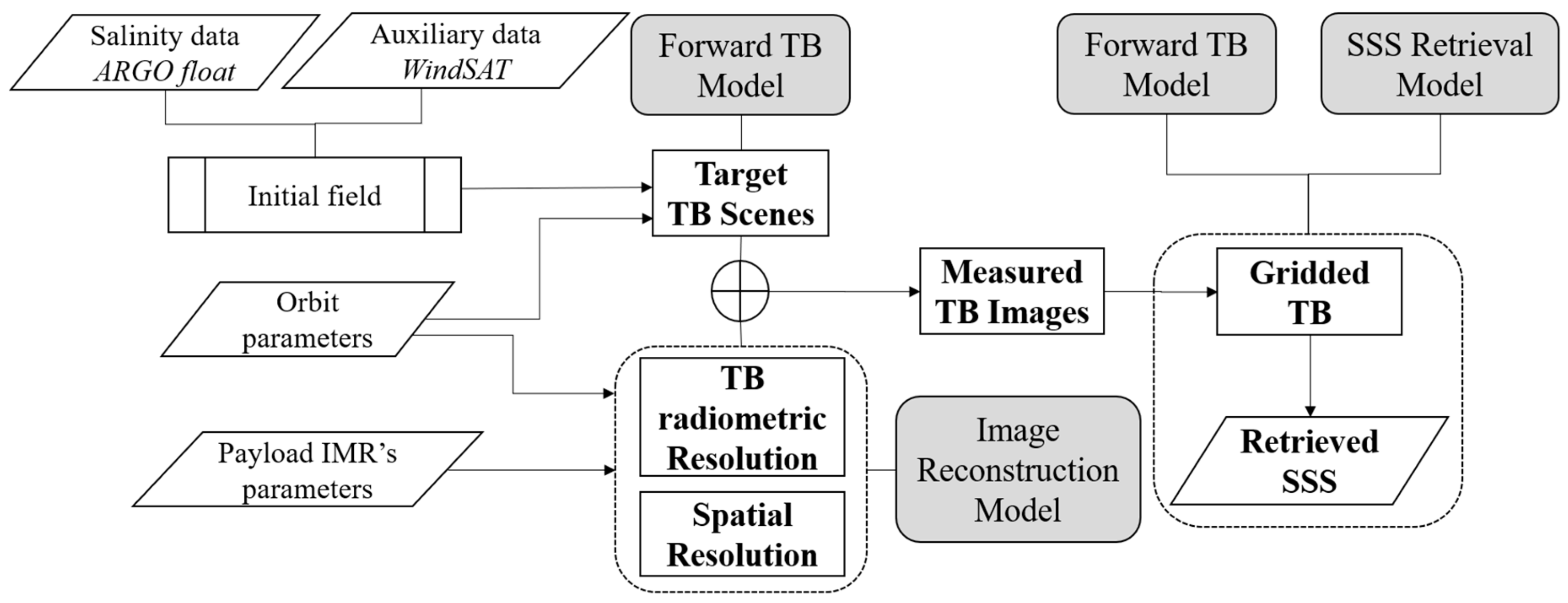
2.3. End-to-End Simulation System
2.3.1. Brightness Temperature (TB) Forward Model
2.3.2. Image Reconstruction Model
2.3.3. Sea-Surface Salinity (SSS) Retrieval Model
3. Results
3.1. Simulated TB Image
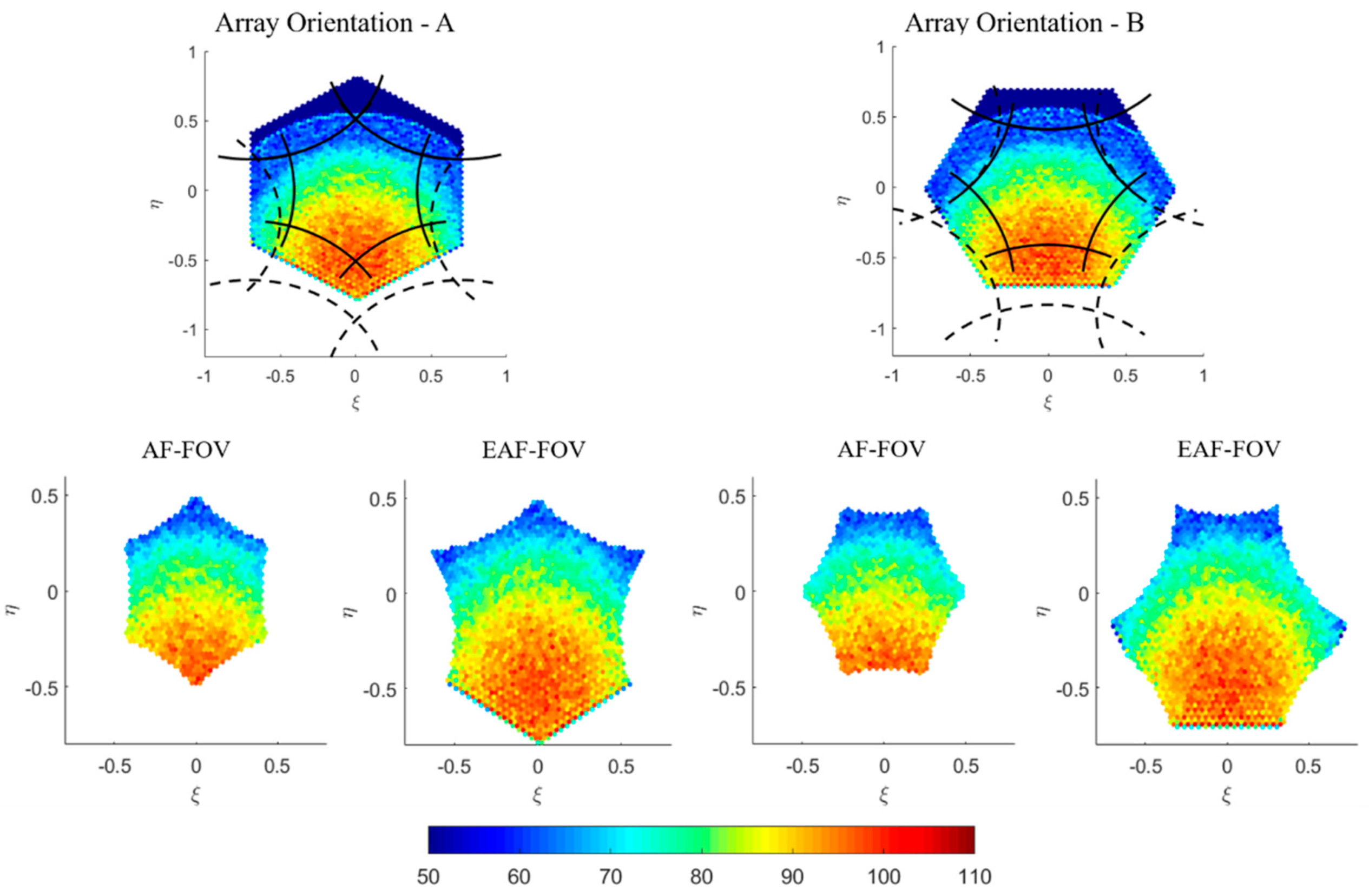
3.2. Incidence Angle
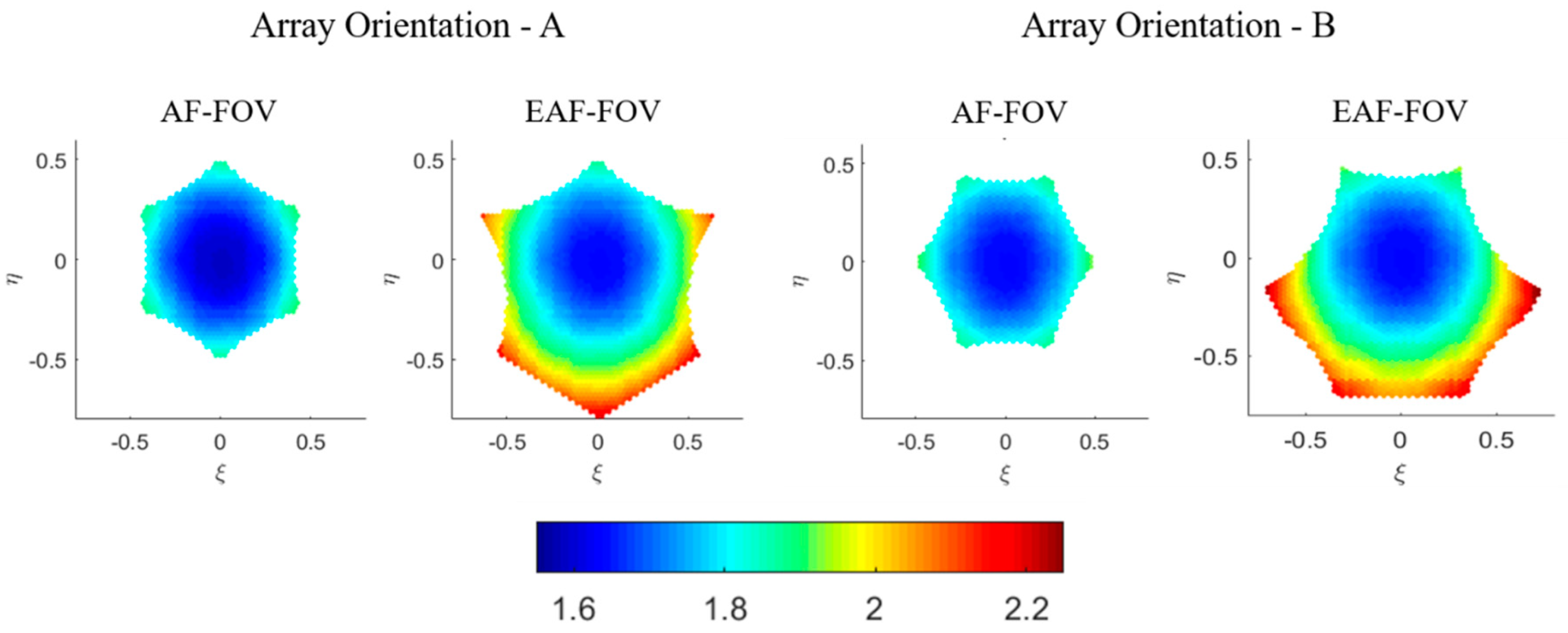
3.3. TB Radiommetric Resolution
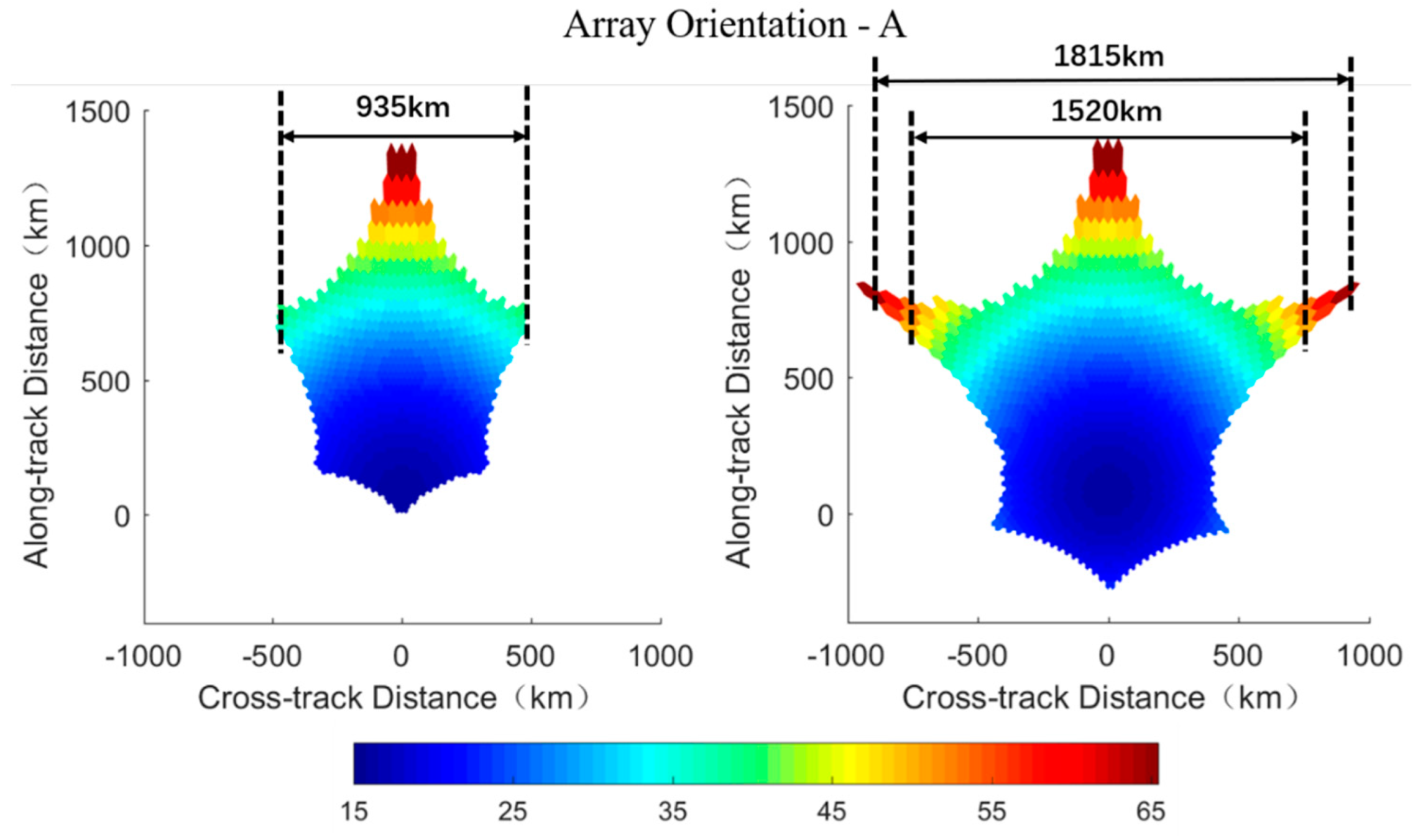
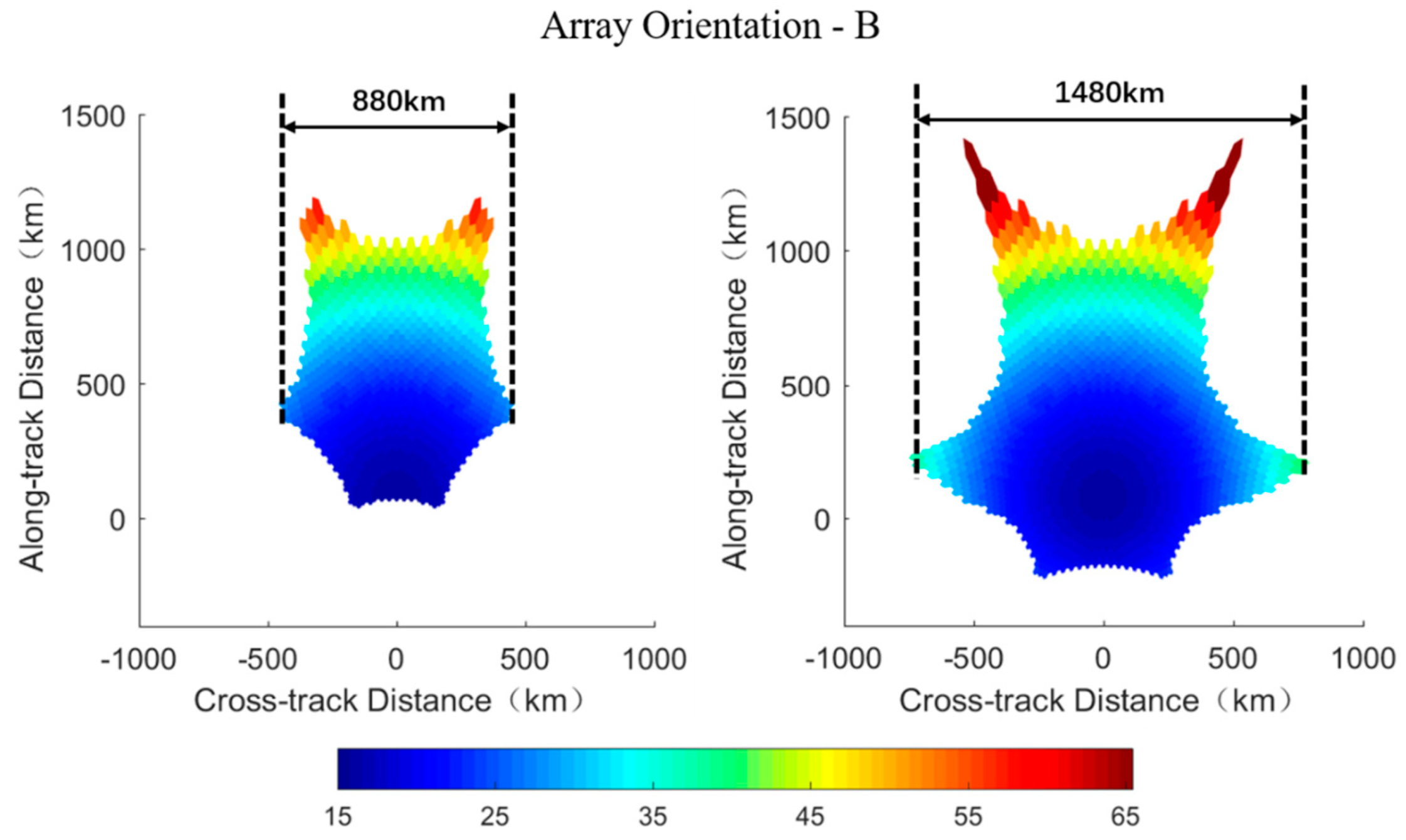
3.4. Spatial Resolution
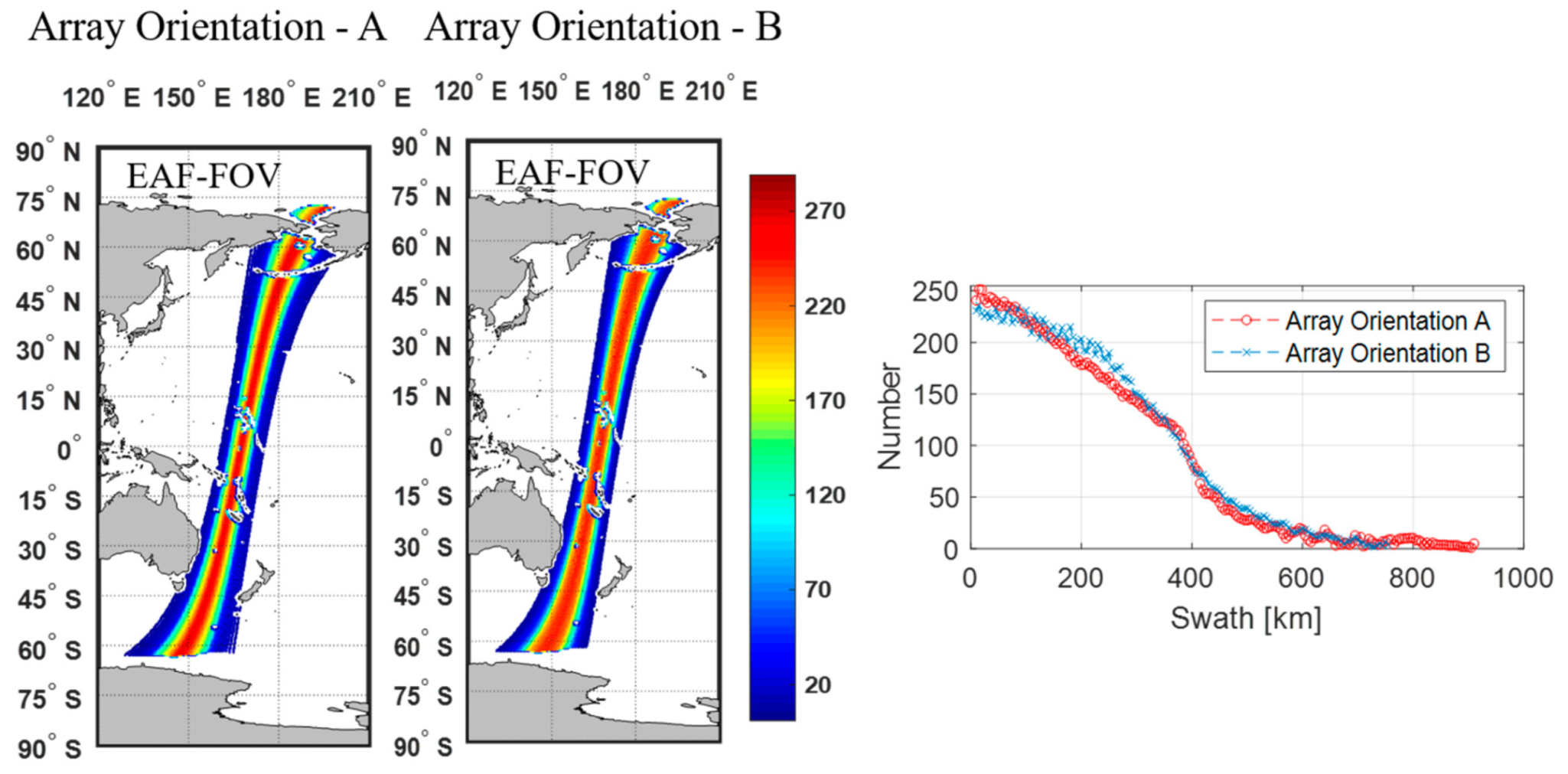
3.5. Number of Measurements in Earth Grid
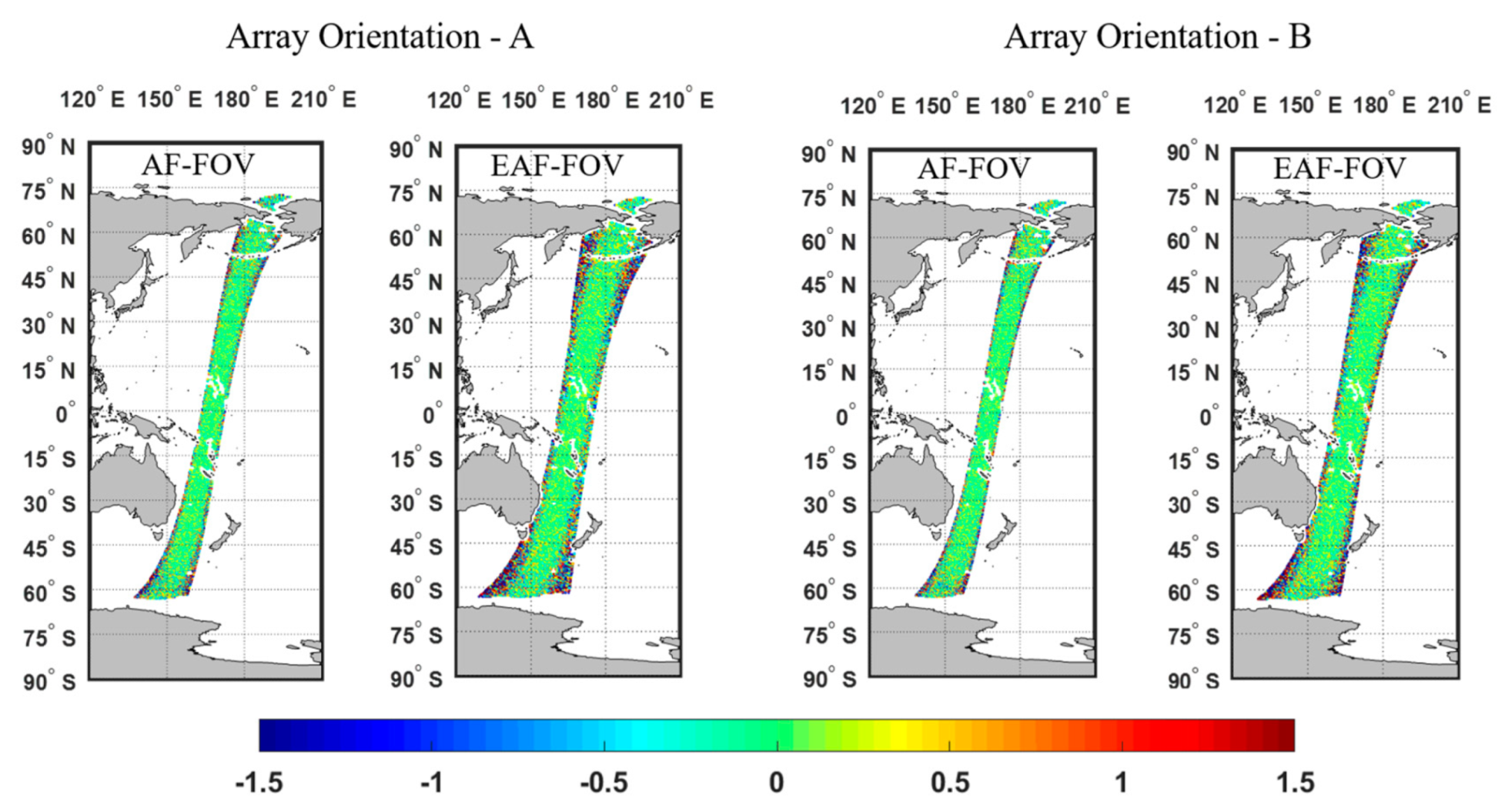
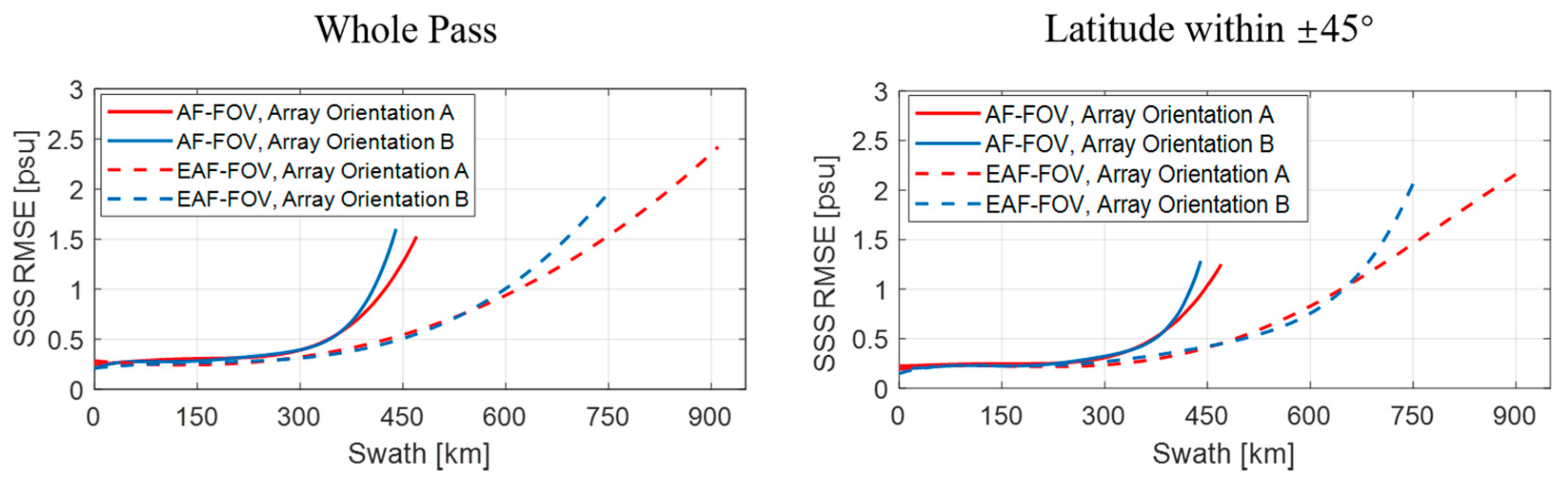
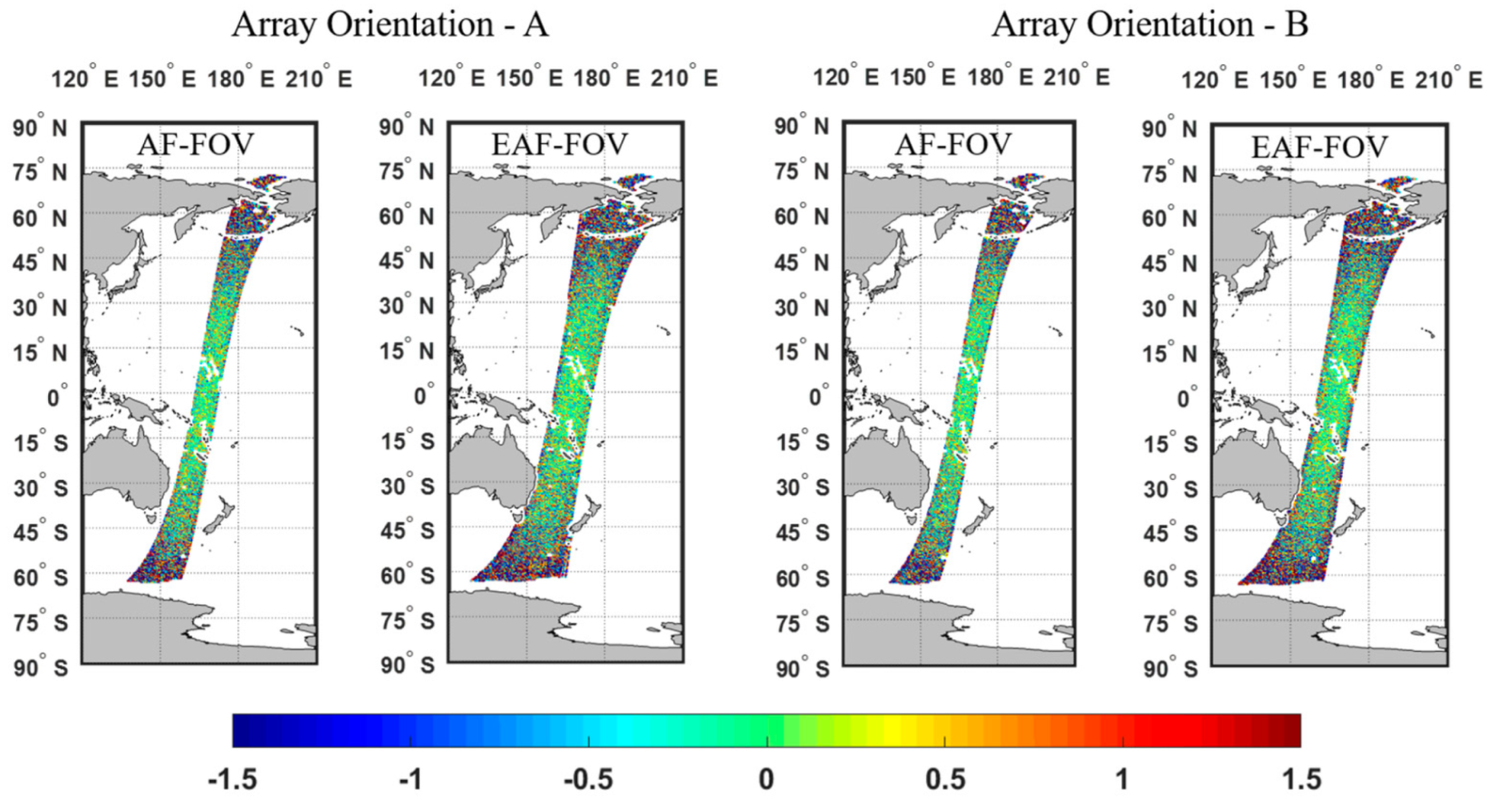
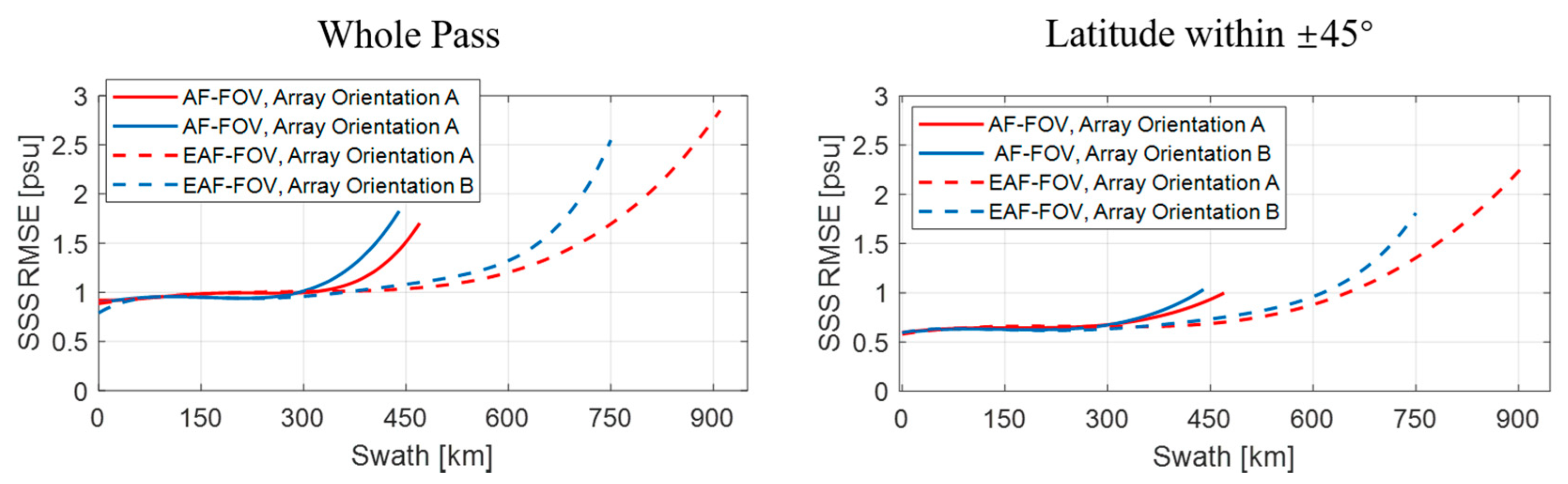
3.6. SSS Accuracy
3.7. Sun Effect
4. Conclusions and Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gille, S.T. Ocean circulation and climate-observing and modelling the global ocean. Eos Trans. Am. Geophys. Union 2013, 82, 517. [Google Scholar] [CrossRef]
- Font, J.; Camps, A.; Borges, A.; Martin-Neira, M.; Boutin, J.; Reul, N.; Kerr, Y.H.; Hahne, A.; Mecklenburg, S. SMOS: The challenging sea surface salinity measurement from space. Proc. IEEE 2009, 9898, 649–665. [Google Scholar] [CrossRef]
- Skliris, N.; Marsh, R.; Josey, S.A.; Good, S.A.; Liu, C.; Allan, R.P. Salinity changes in the world ocean since 1950 in relation to changing surface freshwater fluxes. Clim. Dynam. 2014, 43, 709–736. [Google Scholar] [CrossRef]
- Durack, P.J.; Wijffels, S.E.; Matear, R.J. Ocean salinities reveal strong global water cycle intensification during 1950 to 2000. Science 2012, 336, 455–458. [Google Scholar] [CrossRef] [PubMed]
- Yueh, S.H.; West, R.; Wilson, W.J.; Fuk, K.L.; Njoku, E.G.; Rahmat-Samii, Y. Error sources and feasibility for microwave remote sensing of ocean surface salinity. IEEE Trans. Geosci. Remote Sens. 2001, 3939, 1049–1060. [Google Scholar] [CrossRef]
- Reul, N.; Grodsky, S.A.; Arias, M.; Boutin, J.; Catany, R.; Chapron, B.; D’Amico, F.; Dinnat, E.; Donlon, C.; Fore, A.; et al. Sea surface salinity estimates from spaceborne L-band radiometers: An overview of the first decade of observation (2010–2019). Remote Sens. Environ. 2020, 242, 111769. [Google Scholar] [CrossRef]
- Kerr, Y.H.; Waldteufel, P.; Wigneron, J.; Martinuzzi, J.; Font, J.; Berger, M. Soil moisture retrieval from space: The soil moisture and ocean salinity (SMOS) mission. IEEE Trans. Geosci. Remote Sens. 2001, 3939, 1729–1735. [Google Scholar] [CrossRef]
- Font, J.; Lagerloef, G.S.E.; Le Vine, D.M.; Camps, A.; Zanife, O. The determination of surface salinity with the European SMOS space mission. IEEE Trans. Geosci. Remote Sens. 2004, 4242, 2196–2205. [Google Scholar] [CrossRef]
- Lagerloef, G.; Colomb, F.R.; Le Vine, D.; Wentz, F.; Yueh, S.; Ruf, C.; Lilly, J.; Gunn, J.; Chao, Y. The Aquarius/SAC-D mission: Designed to meet the salinity remote-sensing challenge. Oceanography 2008, 21, 68–81. [Google Scholar] [CrossRef]
- Le Vine, D.M.; Dinnat, E.P.; Meissner, T.; Yueh, S.H.; Wentz, F.J.; Torrusio, S.E.; Lagerloef, G. Status of aquarius/SAC-D and aquarius salinity retrievals. IEEE J. Stars. 2015, 8, 5401–5415. [Google Scholar] [CrossRef]
- Das, N.N.; Entekhabi, D.; Njoku, E.G. An algorithm for merging SMAP radiometer and radar data for high-resolution soil-moisture retrieval. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1504–1512. [Google Scholar] [CrossRef]
- Yin, X.; Zhang, L.; Liu, H.; Yun, R.; Wu, L.; Xu, X.; Zhu, D. Preliminary performance simulation of microwave imager combined active/passive-a new instrument for Chinese salinity mission. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 4001–4004. [Google Scholar]
- Liu, H.; Zhu, D.; Niu, L.; Wu, L.; Wang, C.; Chen, X.; Zhao, X.; Zhang, C.; Zhang, X.; Yin, X.; et al. MICAP (Microwave imager combined active and passive): A new instrument for Chinese ocean salinity satellite. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 184–187. [Google Scholar]
- Yan, L.I.; Hao, L. An End-to-End simulation of ocean salinity using L/S/C TRI-frequency radiometer for water cycle observation mission (WCOM). In Proceedings of the IGARSS 2018-2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 1508–1511. [Google Scholar]
- Li, Y.; Liu, H.; Zhang, A. End-to-end simulation of WCOM IMI sea surface salinity retrieval. Remote Sens. 2019, 11, 217. [Google Scholar] [CrossRef]
- Argo-Argo Data Products. Available online: https://argo.ucsd.edu/data/argo-data-products/ (accessed on 1 September 2019).
- WindSat-Remote Sensing Systems. Available online: http://www.remss.com/missions/windsat/ (accessed on 1 September 2019).
- Zine, S.; Boutin, J.; Font, J.; Reul, N.; Waldteufel, P.; Gabarró, C.; Tenerelli, J.; Vergely, J.-L.; Talone, M.; Delwart, S.; et al. Overview of the SMOS sea surface salinity prototype processor. IEEE Trans. Geosci. Remote Sens. 2008, 46, 621–645. [Google Scholar] [CrossRef]
- Yin, X.; Boutin, J.; Dinnat, E.; Song, Q.; Martin, A. Roughness and foam signature on SMOS-MIRAS brightness temperatures: A semi-theoretical approach. Remote Sens. Environ. 2016, 180, 221–233. [Google Scholar] [CrossRef]
- Yin, X.; Boutin, J.; Martin, N.; Spurgeon, P. Optimization of L-band sea surface emissivity models deduced from SMOS data. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1414–1426. [Google Scholar] [CrossRef]
- Peake, W. Interaction of electromagnetic waves with some natural surfaces. IRE Trans. Antennas Propag. 1959, 7, 324–329. [Google Scholar] [CrossRef]
- Klein, L.; Swift, C.T. An improved model for the dielectric constant of sea water at microwave frequencies. IEEE Trans. Antennas Propag. 1977, 25, 104–111. [Google Scholar] [CrossRef]
- Liebe, H.J.; Rosenkranz, P.W.; Hufford, G.A. Atmospheric 60-GHz oxygen spectrum: New laboratory measurements and line parameters. J. Quant. Spectrosc. Radiat. Transf. 1992, 48, 629–643. [Google Scholar] [CrossRef]
- Corbella, I.; Duffo, N.; Vall-llossera, M.; Camps, A.; Torres, F. The visibility function in interferometric aperture synthesis radiometry. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1677–1682. [Google Scholar] [CrossRef]
- Camps, A.; Vall-Llossera, M.E.; Corbella, I.; Duffo, N.U.R.; Torres, F. Improved image reconstruction algorithms for aperture synthesis radiometers. IEEE Trans. Geosci. Remote 2007, 46, 146–158. [Google Scholar] [CrossRef]
- Camps, A.; Corbella, I.; Bara, J.; Torres, F. Radiometric sensitivity computation in aperture synthesis interferometric radiometry. IEEE Trans. Geosci. Remote Sens. 1998, 36, 685. [Google Scholar] [CrossRef]
- Bará, J.; Camps, A.; Torres, F.; Corbella, I. Angular resolution of two-dimensional, hexagonally sampled interferometric radiometers. Radio Sci. 1998, 33, 1459–1473. [Google Scholar] [CrossRef]
- EASE. Grids-National Snow and Ice Data Center. Available online: https://nsidc.org/data/ease/tools#geo_data_files/ (accessed on 1 October 2019).
- Marquardt, D.W. An algorithm for least-squares estimation of nonlinear parameters. J. Soc. Ind. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]
- Yin, X.; Boutin, J.; Spurgeon, P. Biases between measured and simulated SMOS brightness temperatures over ocean: Influence of sun. IEEE J. Stars. 2013, 6, 1341–1350. [Google Scholar] [CrossRef]
- Camps, A.; Vall-Llossera, M.; Duffo, N.; Zapata, M.; Barrena, V. Sun effects in 2-D aperture synthesis radiometry imaging and their cancelation. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1161–1167. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | IMR | MIRAS |
|---|---|---|
| Frequency (GHz) | 1.4 | 1.4 |
| Bandwidth (MHz) | 20 | 27 |
| Integral Time (s) | 0.9 | 1.2 |
| Number of Elements | 56 | 69 |
| Antenna Spacing | ||
| Spatial Resolution (km) | ~35 | ~50 |
| Radiometric Resolution at Boresight for Ocean (K) | ~1.5 | ~2.5 |
| Polarization | H, V, T3 Simultaneously | HHH, VVV, HHV or VVH One mode per measurement |
| Whole Orbit | Case 1 | Case 2 | |||
|---|---|---|---|---|---|
| AF-FOV | EAF-FOV | AF-FOV | EAF-FOV | ||
| Array Orientation A | N | 32,951 | 52,122 | 32,906 | 52,047 |
| mean | 0 | 0 | 0.042 | 0.045 | |
| RMSE | 0.509 | 0.737 | 1.037 | 1.129 | |
| Array Orientation B | N | 33,389 | 53,849 | 33,344 | 53,747 |
| mean | 0 | 0 | 0.045 | 0.043 | |
| RMSE | 0.563 | 0.759 | 1.069 | 1.182 | |
| Latitude within ± 45° | Case 1 | Case 2 | |||
|---|---|---|---|---|---|
| AF-FOV | EAF-FOV | AF-FOV | EAF-FOV | ||
| Array Orientation A | N | 22,562 | 36,163 | 22,517 | 36,088 |
| mean | 0 | 0 | 0.041 | 0.038 | |
| RMSE | 0.380 | 0.551 | 0.685 | 0.768 | |
| Array Orientation B | N | 22,888 | 37,333 | 22,843 | 37,231 |
| mean | 0 | 0 | 0.047 | 0.038 | |
| RMSE | 0.420 | 0.600 | 0.713 | 0.837 | |
| Array Orientation A | Array Orientation B | |||
|---|---|---|---|---|
| , EAF-FOV, Case 2 | 1.1 psu | 1.2 psu | ||
| 100 km × 100 km | ~159 | 0.087 psu | ~142 | 0.101 psu |
| 200 km × 200 km | ~165 | 0.085 psu | ~148 | 0.099 psu |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Lin, M.; Yin, X.; Zhou, W. Analysis of the Antenna Array Orientation Performance of the Interferometric Microwave Radiometer (IMR) Onboard the Chinese Ocean Salinity Satellite. Sensors 2020, 20, 5396. https://doi.org/10.3390/s20185396
Li Y, Lin M, Yin X, Zhou W. Analysis of the Antenna Array Orientation Performance of the Interferometric Microwave Radiometer (IMR) Onboard the Chinese Ocean Salinity Satellite. Sensors. 2020; 20(18):5396. https://doi.org/10.3390/s20185396
Chicago/Turabian StyleLi, Yan, Mingsen Lin, Xiaobin Yin, and Wu Zhou. 2020. "Analysis of the Antenna Array Orientation Performance of the Interferometric Microwave Radiometer (IMR) Onboard the Chinese Ocean Salinity Satellite" Sensors 20, no. 18: 5396. https://doi.org/10.3390/s20185396
APA StyleLi, Y., Lin, M., Yin, X., & Zhou, W. (2020). Analysis of the Antenna Array Orientation Performance of the Interferometric Microwave Radiometer (IMR) Onboard the Chinese Ocean Salinity Satellite. Sensors, 20(18), 5396. https://doi.org/10.3390/s20185396