Integrating IoT and Blockchain for Ensuring Road Safety: An Unconventional Approach




Abstract
1. Introduction
- Miners spend large amounts of time and resources validating and inserting the transactions into the blockchain.
- The ledgers of the blockchain are immutable, which means that data cannot be removed, changed, or transferred. Blockchain storage is very limited. It is possible to connect only a restricted number of transactions to blockchain.
- Due to storage issues, users pay a transaction fee to get their transactions included in the block by the miners. Larger transaction will cost a larger fee as it takes up more space in the block.
- Another limiting factor of blockchain is its low throughput and high latency. This is mainly due to slow transaction speed and minuscule amount of storage space and there is no appropriate ordering of transactions in blockchain.
- Blockchain’s consensus algorithm offers some limitations too. The consensus mechanism followed by blockchain is divided into two categories based on its type, i.e., Private or Public blockchain.
- Private blockchain is dependent on leader-based consensus mechanism which limits the usage only to trusted partners. However, the loosened security benchmarks make these systems potential targets for DDoS attacks.
- Public blockchain depends on consensus mechanisms such as ‘Proof of Stake’ and ’Proof of Work’. For these, every node must concur with the order of the transactions wherein they have taken place, which limits the number of applications where these technologies can be utilized.
- When two unique miners mine a block at the same time, the chain can part into two distinct forks. In this situation, the two forks will keep on approving blocks and include new blocks. When one of the chains approves a block before the other chain finishes it turns into the longest chain. The longest chain is the one with the longest most legitimate blocks joined and becomes the accepted chain. The transactions mined in the shorter chains are rejected. Rejection of shorter chains due to creation of forks does not guarantee that the transaction is irreversible.
- Creation of forks can cause selfish mining. This means miners can create a separate fork and hide newly generated blocks from the main blockchain and earn more.
- To analyze the limitations of ensuring road safety using IoT and blockchain technology alone and to suggest a new approach for ensuring road safety by using hashgraph.
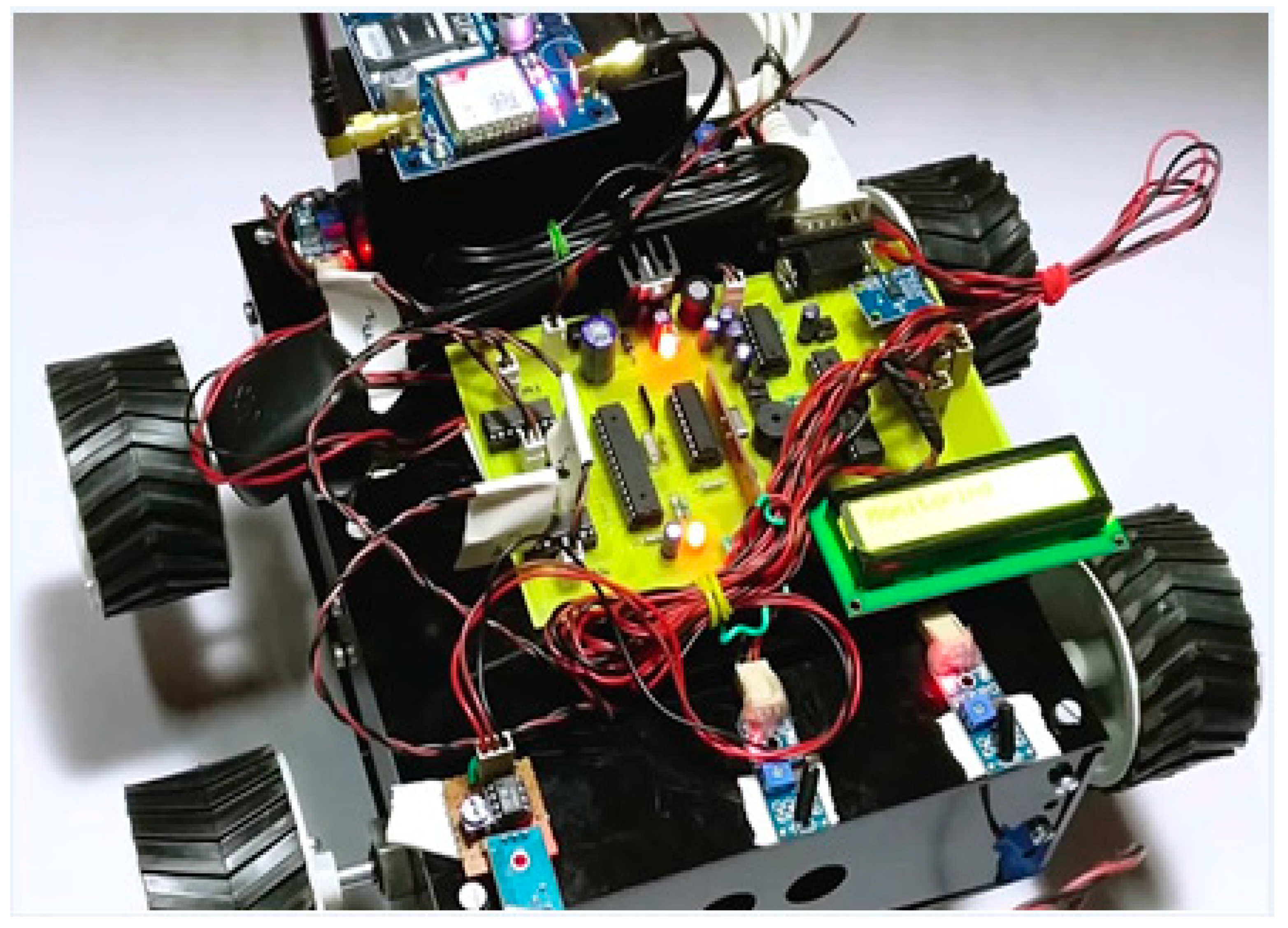
- Integration of IoT with DLT through hashgraph is proposed and tested on the hardware.
- The proposed approach is validated through simulations performed on OMNeT++.
2. Related Work/Background
2.1. Interconnected Vehicles
2.2. Privacy
2.3. Data Ownership
2.4. Blockchain Technology and Interconnected Vehicles
3. Significance of Work
4. System Design and Implementation
4.1. Working of Hashgraph
- Gossip Protocol: Gossip protocol requires the fast exchange of information between the nodes. Passing from one node to another, an incident can be communicated through the entire network. Every event needs to reach every node. The network, not the sender, is responsible for disseminating the details. This constant information sharing gradually builds the hashgraph, which continues to grow.It is interesting to note that there is no actual graph stored in the memory. It is more of a concept. Incidents are stored in memory, however. The hashgraph data are secured cryptographically. The network formed accommodates the communication history of the process. Furthermore, it is not enough to ensure that all the events know about each other. It is equally necessary that events agree on a certain linear order of transactions that are recorded inside the events.It might appear that once gossiping begins, every event becomes aware of every other event and hence consensus is reached, but this is not true. There may be moments when some recent events are yet to be communicated, and this leads to virtual voting. Both in blockchain and in hashgraph, the gossip protocol is used to distribute the information through the network. Basically, every time a node is sent it communicates a new transaction to its neighboring nodes, and so on.
- Proof-of-Work Consensus Protocol: This protocol is used by most of the renowned blockchain technologies like Bitcoin and Ethereum. The nodes are trying to compete to acquire the authority to modify their data to the blockchain on a quite complex mathematical challenge. Validating a block takes an average of 10 min and consumes a ludicrous amount of energy.Throughout the protocol, Bitcoin and Ethereum nodes run a protection algorithm that verifies all transactions to ensure that they do not allow a fraudulent transaction. Even if the node wants to manipulate and add a block with a double spend transaction, the next node to add a block to the blockchain would reject it, communicate with the node before it, and thus delete the fraudulent block transactions. Mining costs are expected to dissuade miners from attempting these sorts of attacks on a blockchain, but if many nodes are deceptive, the duration of the “fraud chain” can increase. This means that the consensus is never necessarily reached in the Work Consensus Proof, but just attempted, which also explains why a transaction receiver usually waits for verifying several nodes to verify a transaction. In a hashgraph the consensus protocol is based on the link graph and the network nodes do not require any additional effort. This process is described below in virtual voting.
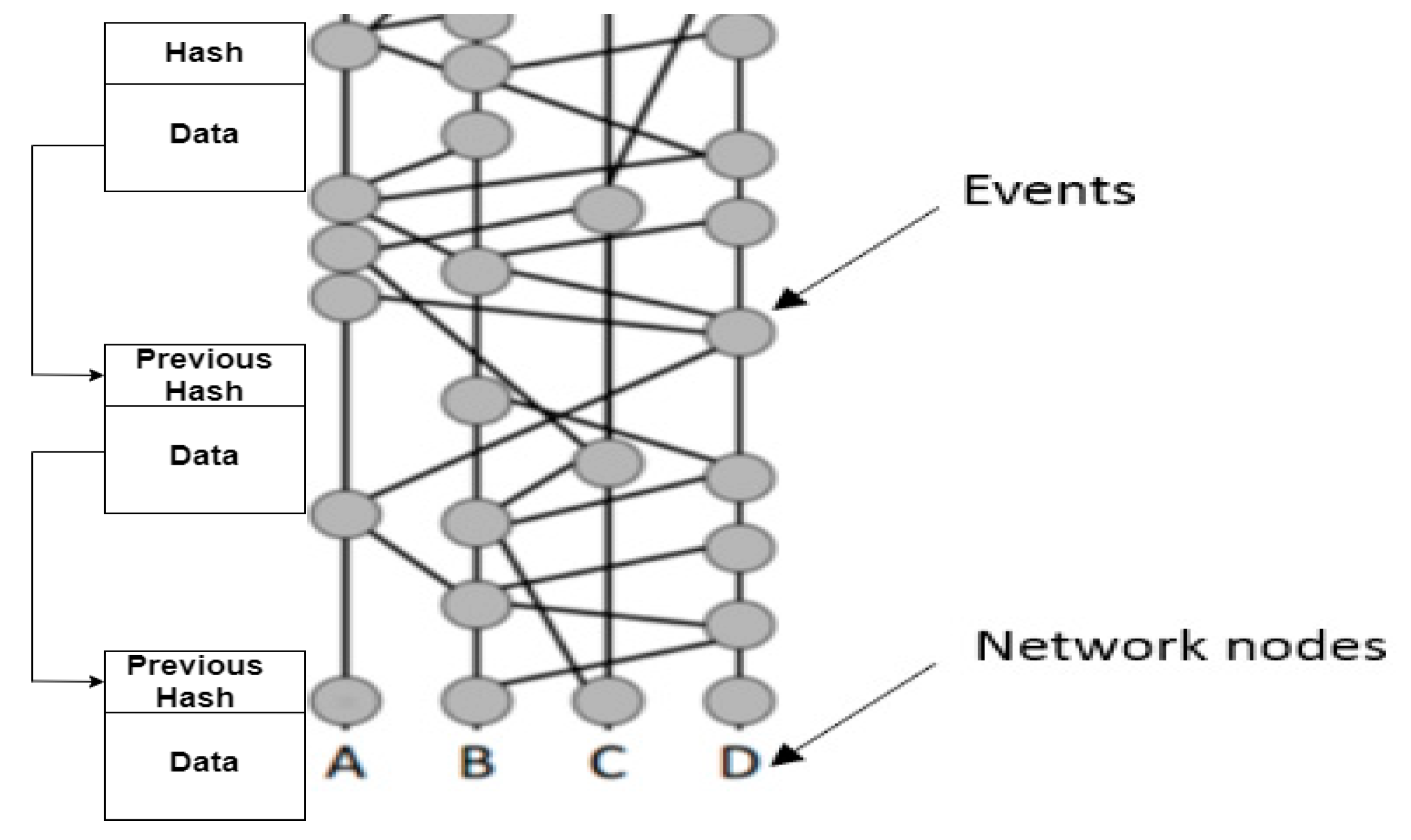
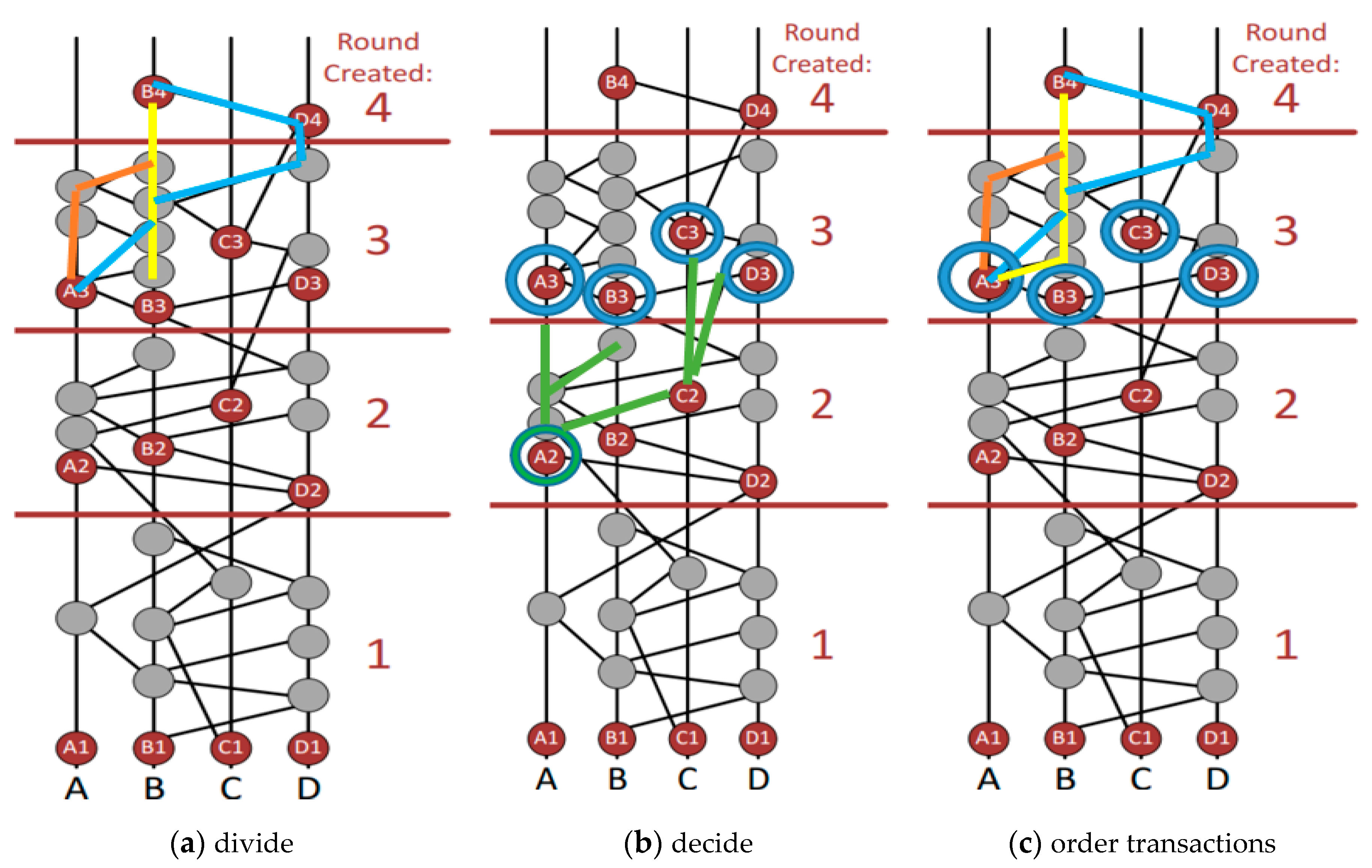
- Virtual Voting and Round Creation: The transactions, consensus, and nodes are some of the main terms for understanding virtual voting. Virtual voting is somewhat similar to democratic voting. It determines a witness’s vote based on witnesses or events. In technology such as Bitcoin, a block makes consensus decisions if it is fast enough to be the first to solve the hash, but in virtual voting, the decision node is selected through a complicated process consisting of three stages: (a) divide, (b) decide, and (c) order transactions. The process of round creation is shown in Figure 5. Here, The Hashgraph is broken into rounds. Each time an event can connect more than 2/3 of the first events of the current round by more paths than 2/3 of the node population is created a round. In doing so one event sees the other event strongly. A3 is strongly seen in Figure 5 (Population of node = 4, Path Number Connection = 3). Each node of the newly created round must acknowledge whether it contains the data of the previous node or not. Here previous node refers to the node of the previous preceding round. Verification is done once this acknowledgment is received. In this figure all first nodes in the third round must have decided on the data in A2. The final stage is to collect answers from the third-round nodes. The fourth-round nodes are required to do so. They need to see the third-round node very strongly. When one of the fourth-round nodes succeeds in gathering a super majority (more than 2/3 of the population) of positive votes over the data in the second-round then this data is found to be consensus.
- Divide Round: Rounds are generated on the basis of events which are clearly seen. If A can see 2/3rd round t events even, then round t+1 is allocated. All the first events are called witnesses in a round, and only the witness events are allowed to send or receive virtual ballots. In the figure, all witnesses are A1, B1, C1, D1, A2, B2, C2, D2, A3, B3, etc., as they are the first events of rounds 1, 2, 3, respectively, as shown in Figure 5. This process takes place in Decide Fame. Algorithm 1 shows the creation of divide round [33].
Algorithm 1: Divide Round 1: Process Div Round 2: For Every Event A 3: M ← Maximum Parent Round for A 4: Else 5: M ← 1 // no Maximum Parent Round exist 6: If A > 2t/3 M // A sees more than 2t/3 rounds than M witnesses 7: A.round ← M+1 8: Else 9: A.round ← M 10: A.Witnesses ← no self-parent of A exists 11: Or (A.round > A.self-parent.round) - Decide Fame: Whether an event (witness) is famous or not, is determined in this round. You can call a witness famous because other next-round witnesses will see it. For example, B2 is seen by A3 via B3, it is also seen by C3 through D3 and B3, hence it is seen by four next-round witnesses namely A3, B3, C3, D3 (Round-3 witnesses). B2 is popular for this. This exercise takes place for all witness cases. When two-thirds of a population (referring to stake) sees an incident then a super-majority is said to see it, meaning that it is strongly seen. Vote counting is achieved by events involving witnesses. From B4, A3 can be seen strongly through paths via A, B, and D, which is a super-majority. B4 can also see B3 and C3 from A, B, and D strongly, too. It is also able to see D3 strongly, through A, B, C, and D. This confirms B2 is undeniably successful after the counting of votes. Algorithm 2 shows the creation of decide fame.
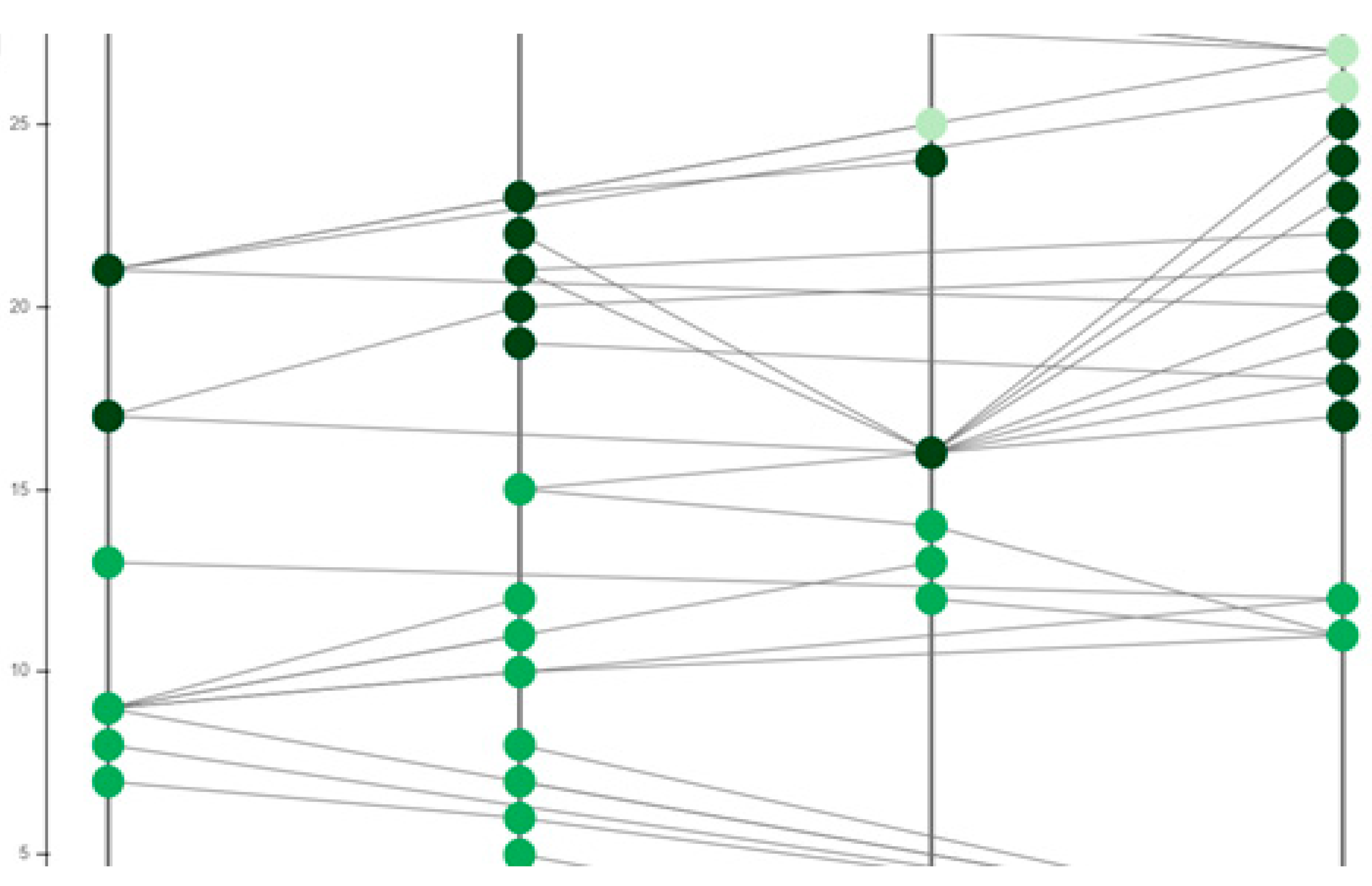
Algorithm 2: Decide Fame 1: Process DecFam 2: For every event A ordering from earlier to later on basis of rounds round 3: If A.Witnesses && B.Witnesses && B.round > A.round 4: Else 5: P ← B.round – A.round 6: Q ← Witness set events in round 7: B.round −1 // B can see strongly 8: R ← Q 9: containing majority Votes (‘TRUE’ in case of a tie) 10: F ← Q events with R votes 11: If P = 1 12: B. Votes 13: Else 14: If P mod J > 0 // for normal rounds 15: If P mod J > 0 // for normal rounds 16: If F > 2*t/3 // take decision when in supermajority 17: A. Fam← R 18: B. Votes ← R 19: Break; 20: Else // only Votes 21: B. Votes ← R 22: Else // Coin Round 23: If S > 2*t/3 // vote if it is a supermajority 24: B. vote ← R 25: Else // Coin flipping occurs 26: B.Votes ← mid bit of B.sign - Order of speed of transactions: After a consensus has been reached on the fame of certain events, another consensus can be achieved regarding the order of transactions. This is done by sorting out timestamps and consensus on older events. To understand this step, the concept of “received round” is key. An event E has a received round Y if Y is the first round where all the unique famous witnesses are descendants of E. For example: E has a received round Y. Then a new unique famous witness W is created by A in round Y. However, W has a self-ancestor V, which has the knowledge of E beforehand. Additionally, when it is first created, it is given the timestamp S. Therefore, S is the time when A first learned of E. Therefore, the received time of E can be calculated by taking the median of all such timestamps created by multiple members in round Y. In this way consensus order is reached. All events are sorted according to their received rounds. If two events have the same rounds, they can be sorted by received times. If they are still tied, they are sorted by their signatures. Events are split by sorting with respect to signatures after the XORing is performed on these signatures with other unique famous witness signatures in the received round [34].
Algorithm 3: Order Finding 1: Process FindOrd 2: for every event A 3: if non-existence of event B for round M in or before round M having B. 4: witnesses = ‘TRUE’ && B. fam = UNDECIDE && A ϵ ancestor of every round with unique fam witnesses && is ‘FALSE’ of any round before round 5: then 6: A. roundReceive ← M 7: Q ← every event set W so that V ϵ self-ancestor of round unique fam witnesses, && A ϵ ancestor of W not belongs to self-parent of W. 8: consenTime←median of //Consensus Timings Timestamps 9: for all events in Q 10: return each and every event having roundRecieve not ‘UNDECIDE’, sorted by roundReceive, && ties sorted by consenTime, through white sign
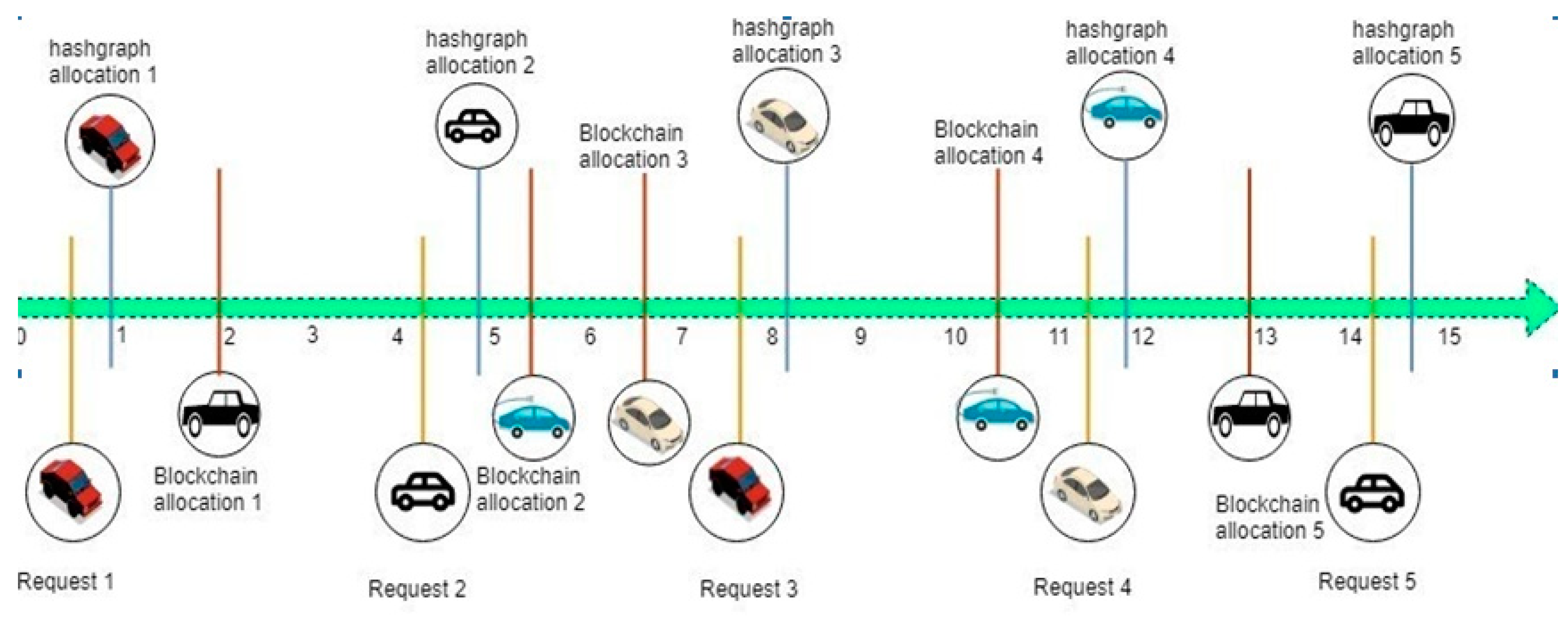
4.2. Requesting of Message Ordering
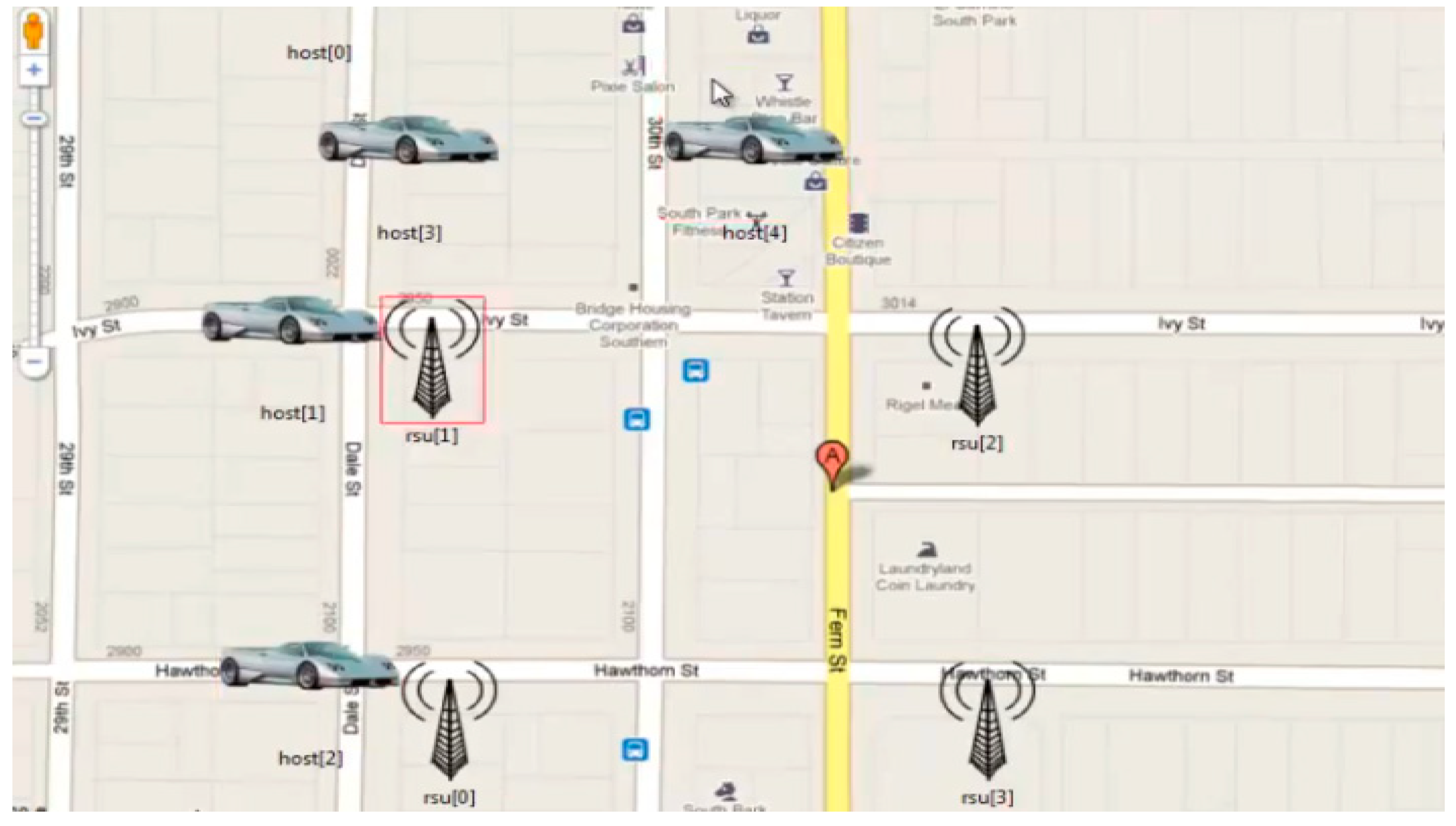
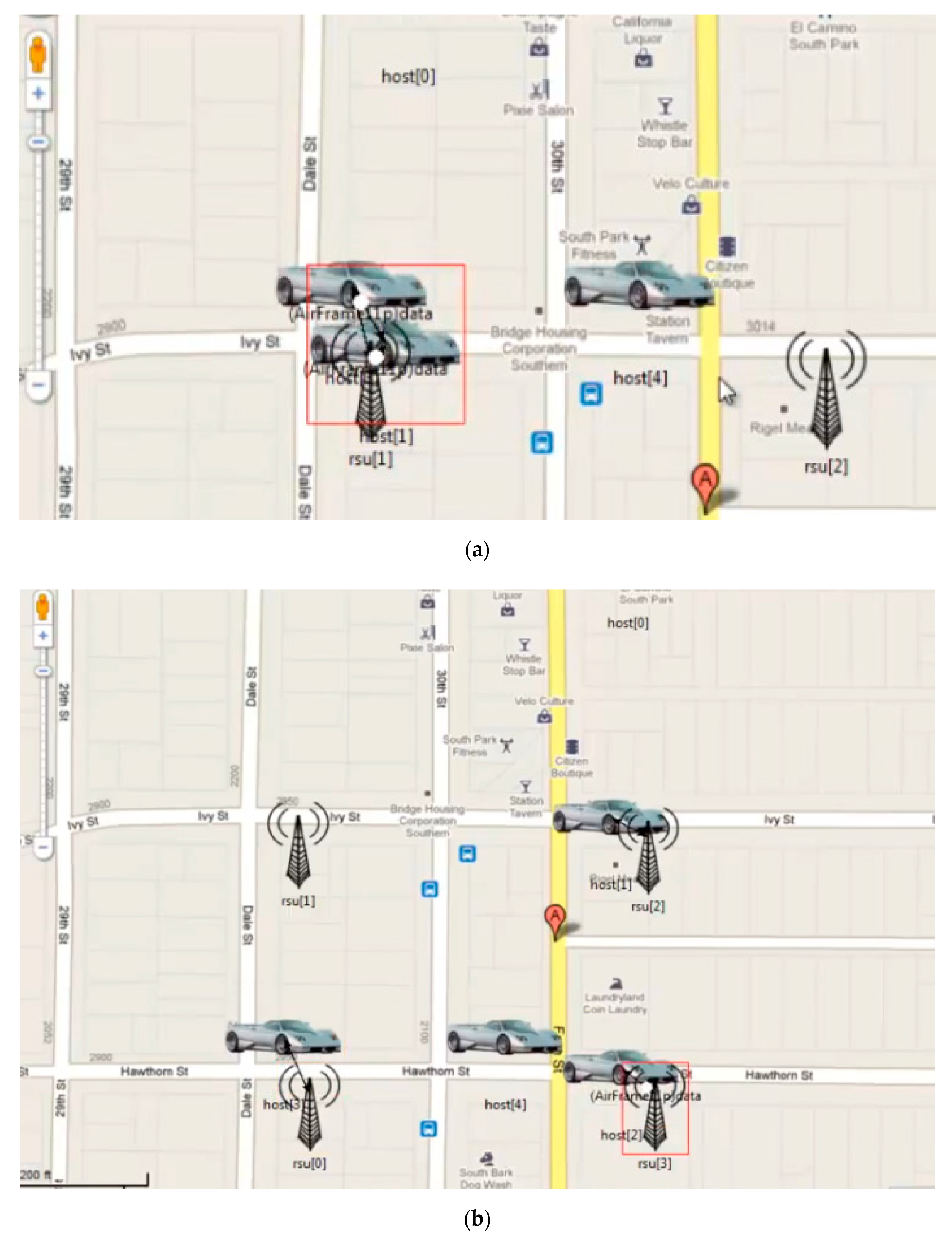
5. Simulation
6. Comparative Analysis
- Transaction Speed:
- -
- Bitcoin and Ethereum are restricted by their consensus protocol to 6 and 14 tps, respectively, while the hashgraph based approach given by us is limited only by the internet bandwidth to 260k tps which is approximately five times greater than the visa network.
- -
- The consensus algorithm of hashgraph can process thousands of transactions per second. Consensus latency is very low while it provides very high throughput. Hashgraph technology is quick as far as utilizing the gossip protocol which spreads messages between network users. These messages are selectively optimized to diminish the communication overhead.
- -
- The identities of all nodes are known beforehand in permissioned distributed ledgers and the network is not open to the arbitrary participants. The prior knowledge of the participating nodes’ identities provides a strong protection against Sybil threats and facilitates consensus building. This means that no framework of Sybil protection needs to be placed in between and thus the performance can be significantly improved when compared to the public blockchain.
- -
- Since hashgraph is currently a private distributed ledger, its output is compared with other private blockchains, such as IBM HyperLedger Fabric (700–800 transactions per second) or Red Belly (400,000–500,000 transactions per second). Its performance must not be collated with public blockchains such as Bitcoin or Ethereum (10 transactions per second), as their speed is low. Hashgraph has yet to provide specific technical information to deploy as a public ledger for its implementation.
- Fairness: In blockchain a node decides in which order a transaction should be kept in a block. However, this may be viewed by end-users unethically and prevents the building blockchain based applications like share market. In hashgraph, the timing protocol is absolutely fair to all users. Since our method is based on the gossip protocol, which implies that if a node randomly selects its successors homogeneously, there is some likelihood (e.g., one-third), if neighbors of the node are randomly selected uniformly that all the nodes selected will be Byzantine or dishonest. These dishonest successors will avoid the transaction from being transferred to the next group of nodes, thereby preventing the transaction from hitting two-thirds of the network which would end in an unacceptable result for the fair creator.
- Security: Asynchronous Byzantine fault tolerance (A-BFT) is the special distributed consensus technology which is used by hashgraph. This ensures that the protocol will always reach consensus with the only assumption (i.e., less than 1/3 of the nodes are malicious). It is proved that the incompressible limit for a system to be BFT is 1/3 of nodes. In addition, the hashgraph is the only decentralized protocol that is ‘bank-grade level of security’ and can work with various institutions.
- Stability: Our proposed system is stabile as it ensures security because the possibility of forking is minimized by allowing advanced legitimate controls. Technical controls include signed state proofs, ledger ID, and even forks are also taken care of in this way.
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Coppola, R.; Morisio, M. Connected Car: Technologies, Issues, Future Trends. ACM Comput. Surv. 2017, 49, 1–36. [Google Scholar] [CrossRef]
- Calvo, J.A.L.; Mathar, R. Secure blockchain-based communication scheme for connected vehicles. In Proceedings of the 2018 European Conference on Networks and Communications (EuCNC), Ljubljana, Slovenia, 18–21 June 2018. [Google Scholar]
- Welch, D.; Behrmann, E. Who’s Winning the Self-Driving Car Race? 2018. Available online: https://www.bloomberg.com/news/features/2018-05-07/who-s-winning-the-self-driving-car-race (accessed on 15 April 2020).
- Amoozadeh, M. Security vulnerabilities of connected vehicle streams and their impact on cooperative driving. IEEE Commun. Mag. 2015, 53, 126–132. [Google Scholar] [CrossRef]
- Joshi, G.P.; Yang, E. Deep Learning-based intrusion detection scheme for very small number of unknown intrusion instances. In Proceedings of the 9th International Conference on Advanced Computing, Communication, and Information Sciences (ICACCI-2019), Seoul, Korea, 13–14 December 2019; pp. 9–10. [Google Scholar]
- Karnouskos, S.; Kerschbaum, F. Privacy and Integrity Considerations in Hyperconnected Autonomous Vehicles. Proc. IEEE 2018, 106, 160–170. [Google Scholar] [CrossRef]
- Singh, M.; Kim, S. Introduce reward-based intelligent vehicles communication using blockchain. In Proceedings of the 2017 International SoC Design Conference (ISOCC), Seoul, Korea, 5–8 November 2017; pp. 15–16. [Google Scholar]
- Dorri, A. BlockChain: A Distributed Solution to Automotive Security and Privacy. IEEE Commun. Mag. 2017, 55, 119–125. [Google Scholar] [CrossRef]
- Joy, J.; Gerla, M. Internet of Vehicles and Autonomous Connected Car–Privacy and Security Issues. In Proceedings of the 2017 26th International Conference on Computer Communication and Networks (ICCCN), Vancouver, BC, Canada, 31 July–3 August 2017; pp. 1–9. [Google Scholar]
- Prashar, D.; Jha, N.; Jha, S.; Lee, Y.; Joshi, G.P. Blockchain-Based Traceability and Visibility for Agricultural Products: A Decentralized Way of Ensuring Food Safety in India. Sustainability 2020, 12, 3497. [Google Scholar] [CrossRef]
- Sharma, P.K.; Moon, S.Y.; Park, J.H. Block-VN: A Distributed Blockchain Based Vehicular Network Architecture in Smart City. JIPS 2017, 13, 184–195. [Google Scholar] [CrossRef]
- Fujihara, A. Proposing a System for Collaborative Traffic Information Gathering and Sharing Incentivized by Blockchain Technology. In Proceedings of the Advances in Intelligent Networking and Collaborative Systems; Springer International Publishing: Cham, Slovakia, 2019; pp. 170–182. [Google Scholar]
- Fujihara, A. PoWaP: Proof of Work at Proximity for a crowdsensing system for collaborative traffic information gathering. Internet Things 2019, 100046, in press. [Google Scholar] [CrossRef]
- Villacampa, J.A.S. Towards a Blockchain-Based Private Road Traffic Management Implementation. Ph.D. Thesis, Luleå University of Technology, Luleå, Sweden, 2019. [Google Scholar]
- Xie, L.; Ding, Y.; Yang, H.; Wang, X. Blockchain-based secure and trustworthy Internet of Things in SDN-enabled 5G-VANETs. IEEE Access 2019, 7, 56656–56666. [Google Scholar] [CrossRef]
- Javaid, U.; Aman, M.N.; Sikdar, B. DrivMan: Driving trust management and data sharing in VANETS with blockchain and smart contracts. In Proceedings of the 2019 IEEE 89th Vehicular Technology Conference (VTC2019-Spring), Kuala Lumpur, Malaysia, 28 April–1 May 2019. [Google Scholar]
- Lu, R.; Lin, X.; Liang, X.; Shen, X. A Dynamic Privacy-Preserving Key Management Scheme for Location-Based Services in VANETs. IEEE Trans. Intell. Transp. Syst. 2012, 13, 127–139. [Google Scholar] [CrossRef]
- Molina-Gil, J.; Caballero-Gil, P.; Caballero-Gil, C. Aggregation and Probabilistic Verification for Data Authentication in VANETs. Inf. Sci. 2014, 262, 172–189. [Google Scholar] [CrossRef]
- Zhu, X.; Jiang, S.; Wang, L.; Li, H. Efficient Privacy-Preserving Authentication for Vehicular Ad Hoc Networks. IEEE Trans. Veh. Technol. 2014, 63, 907–919. [Google Scholar] [CrossRef]
- Chuang, M.-C.; Lee, J.-F. TEAM: Trust-Extended Authentication Mechanism for Vehicular Ad Hoc Networks. IEEE Syst. J. 2014, 8, 749–758. [Google Scholar] [CrossRef]
- Zhang, L.; Wu, Q.; Domingo-Ferrer, J.; Qin, B.; Hu, C. Distributed Aggregate Privacy-Preserving Authentication in VANETs. IEEE Trans. Intell. Transp. Syst. 2017, 18, 516–526. [Google Scholar] [CrossRef]
- Shen, J.; Gui, Z.; Ji, S.; Shen, J.; Tan, H.; Tang, Y. Cloud-Aided Lightweight Certificateless Authentication Protocol with Anonymity for Wireless Body Area Networks. J. Netw. Comput. Appl. 2018, 106, 117–123. [Google Scholar] [CrossRef]
- Shamir, A. Identity-Based Cryptosystems and Signature Schemes. Adv. Cryptol. Crypto 1984, 196, 47–53. [Google Scholar]
- Zhang, C.; Lu, R.; Lin, X.; Ho, P.-H.; Shen, X. An Efficient IdentityBased Batch Verification Scheme for Vehicular Sensor Networks. In Proceedings of the IEEE INFOCOM 2008–The 27th Conference on Computer Communications, Phoenix, AZ, USA, 13–18 April 2008; pp. 246–250. [Google Scholar]
- Lee, C.-C.; Lai, Y.-M. Toward A Secure Batch Verification with Group Testing for VANET. Wirel. Netw. 2013, 19, 1441–1449. [Google Scholar] [CrossRef]
- Jung, C.D.; Sur, C.; Park, Y.; Rhee, K.-H. A Robust and Efficient Anonymous Authentication Protocol in VANETs. J. Commun. Netw. 2009, 11, 607–614. [Google Scholar] [CrossRef]
- Li, J.; Lu, H.; Guizani, M. ACPN: A Novel Authentication Framework with Conditional Privacy-Preservation and Non-Repudiation for VANETs. IEEE Trans. Parallel Distrib. Syst. 2015, 26, 938–948. [Google Scholar] [CrossRef]
- He, D.; Zeadally, S.; Xu, B.; Huang, X. An Efficient Identity-Based Conditional Privacy-Preserving Authentication Scheme for Vehicular Ad Hoc Networks. IEEE Trans. Inf. Forensics Secur. 2015, 10, 2681–2691. [Google Scholar] [CrossRef]
- Hassija, V.; Saxena, V.; Chamola, V. A mobile data offloading framework based on a combination of blockchain and virtual voting. Softw. Pract. Exp. 2020, in press. [Google Scholar] [CrossRef]
- Hussain, R.; Nawaz, W.; Lee, J.; Son, J.; Seo, J.T. A Hybrid Trust Management Framework for Vehicular Social Networks. In Proceedings of the Computational Social Networks, Ho Chi Minh City, Vietnam, 2–4 August 2016; Nguyen, H.T., Snasel, V., Eds.; Springer International Publishing: Cham, Vietnam, 2016; pp. 214–225. [Google Scholar]
- Shrestha, R.; Nam, S.Y. Regional blockchain for vehicular networks to prevent 51% attacks. IEEE Access 2019, 7, 95021–95033. [Google Scholar] [CrossRef]
- Zhu, Q.; Loke, S.W.; Trujillo-Rasua, R.; Jiang, F.; Xiang, Y. Applications of Distributed Ledger Technologies to the Internet of Things: A Survey. ACM Comput. Surv. 2019, 52, 1–34. [Google Scholar] [CrossRef]
- Baird, L. The Swirlds Hashgraph Consensus Algorithm: Fair, Fast, Byzantine Fault Tolerance. Available online: https://www.swirlds.com/downloads/SWIRLDS-TR-2016-01.pdf (accessed on 15 April 2020).
- Jain, D.; Krishna, D.N.G.; Goyal, P.; Hassija, V. Connected vehicular network using Hashgraph. Prepr. Future Gener. Comput. Syst. 2019, in press. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters in the Proposed Method | Objectives of the Parameters in Proposed Work | Existing Works in Which These Parameters are Used | Objectives of the Parameters in Existing Works |
|---|---|---|---|
| Transaction Speed | The hashgraph based approach in our method is limited only by the internet bandwidth to 260k tps which is approximately five times greater than the visa network. | Xie et al. [15] | Bitcoin and Ethereum are restricted by their consensus protocol to 6 and 14 tps, respectively |
| Stability | Possibility of forking is minimized by allowing advanced legitimate controls | Zhang et al. [24] | No legitimate controls Suggested a batch signature check scheme for V2R communications. However, this scheme was vulnerable to replay attack. |
| Security | Our method proves that the incompressible limit for a system to be BFT is 1/3 of nodes which is better than any other proposed method | Lu et al. [17] | Suggested a location-based services (LBS), with dynamic key management scheme. No quantitative analysis has been done regarding security to date. |
| Fairness | All the nodes selected are either Byzantine or dishonest. | He et al. [28] | Not necessary. An efficient identity-based conditional privacy-preserving authentication (CPPA) scheme established. Worked specially in VANETs. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Prashar, D.; Jha, N.; Jha, S.; Joshi, G.P.; Seo, C. Integrating IoT and Blockchain for Ensuring Road Safety: An Unconventional Approach. Sensors 2020, 20, 3296. https://doi.org/10.3390/s20113296
Prashar D, Jha N, Jha S, Joshi GP, Seo C. Integrating IoT and Blockchain for Ensuring Road Safety: An Unconventional Approach. Sensors. 2020; 20(11):3296. https://doi.org/10.3390/s20113296
Chicago/Turabian StylePrashar, Deepak, Nishant Jha, Sudan Jha, Gyanendra Prasad Joshi, and Changho Seo. 2020. "Integrating IoT and Blockchain for Ensuring Road Safety: An Unconventional Approach" Sensors 20, no. 11: 3296. https://doi.org/10.3390/s20113296
APA StylePrashar, D., Jha, N., Jha, S., Joshi, G. P., & Seo, C. (2020). Integrating IoT and Blockchain for Ensuring Road Safety: An Unconventional Approach. Sensors, 20(11), 3296. https://doi.org/10.3390/s20113296