A Median-Ratio Scene-Based Non-Uniformity Correction Method for Airborne Infrared Point Target Detection System

Abstract
1. Introduction
2. Materials and Methods
2.1. Bad Points Replacement
2.1.1. Bad Pixels Detection Algorithm Based on the Sliding Window
2.1.2. Bad Points Compensation: Neighborhood Substitution
2.2. The Observation Model of Median-Ratio Scene-Based NUC (MRSBNUC)
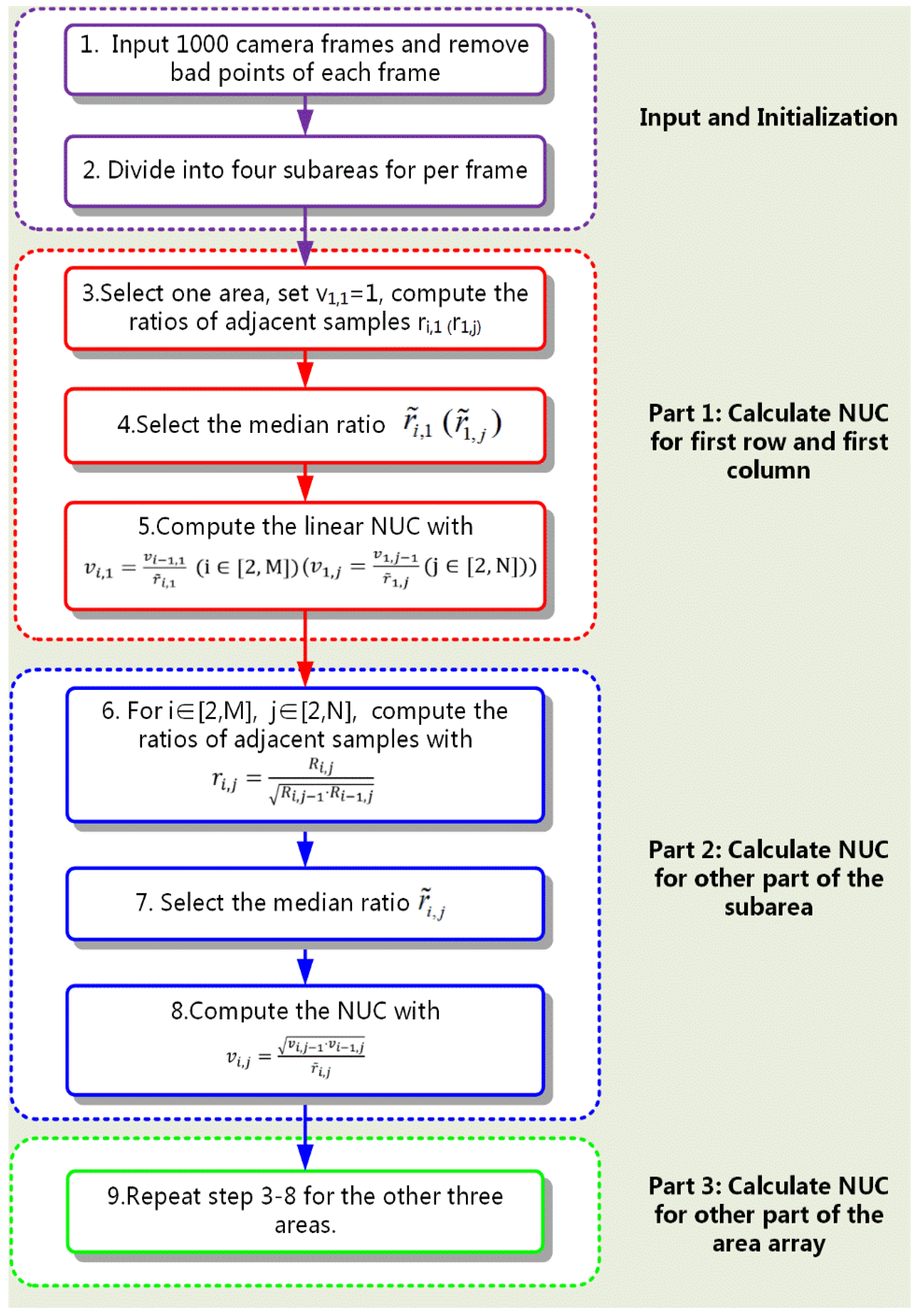
2.3. MRSBNUC Method
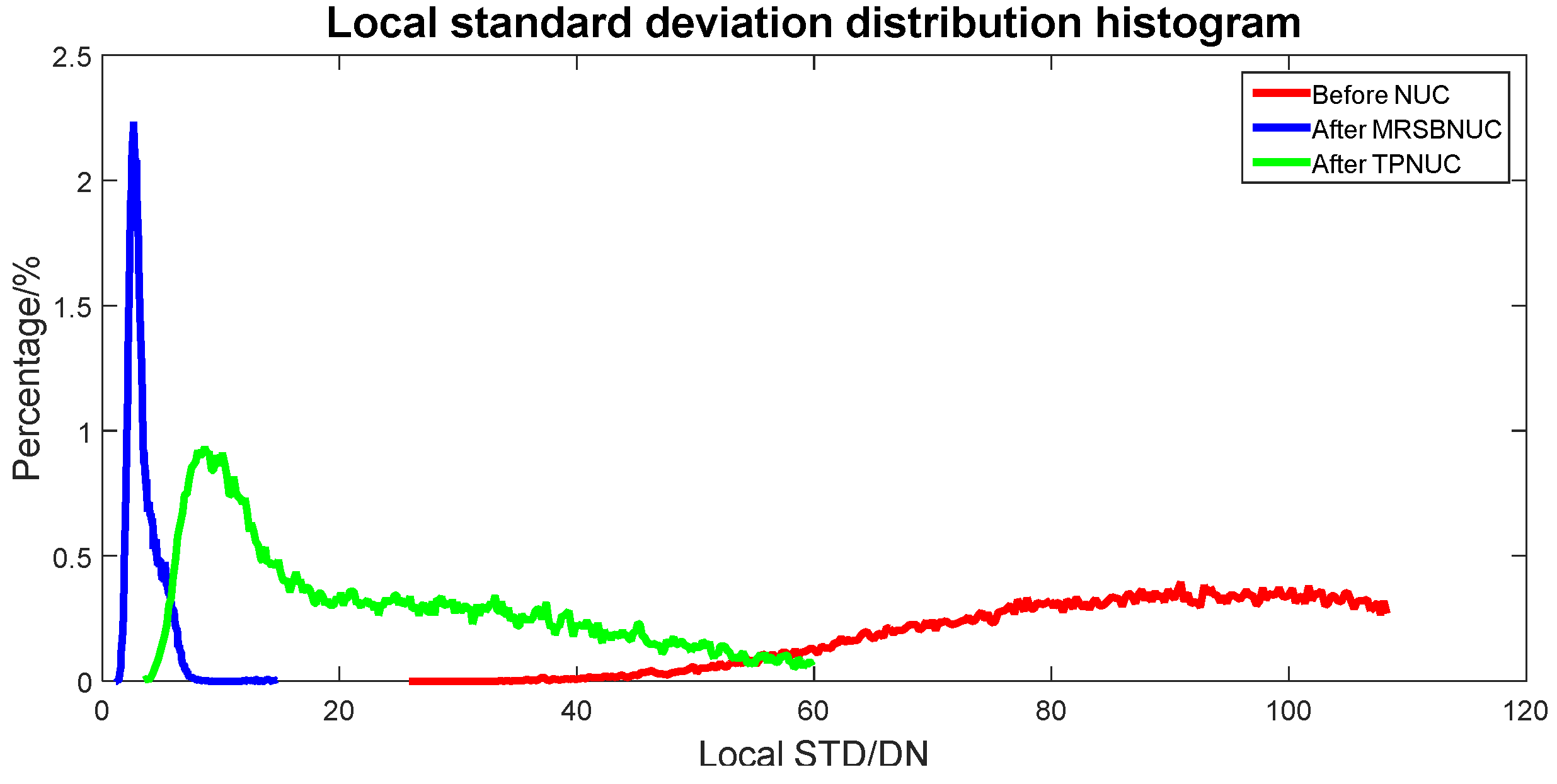
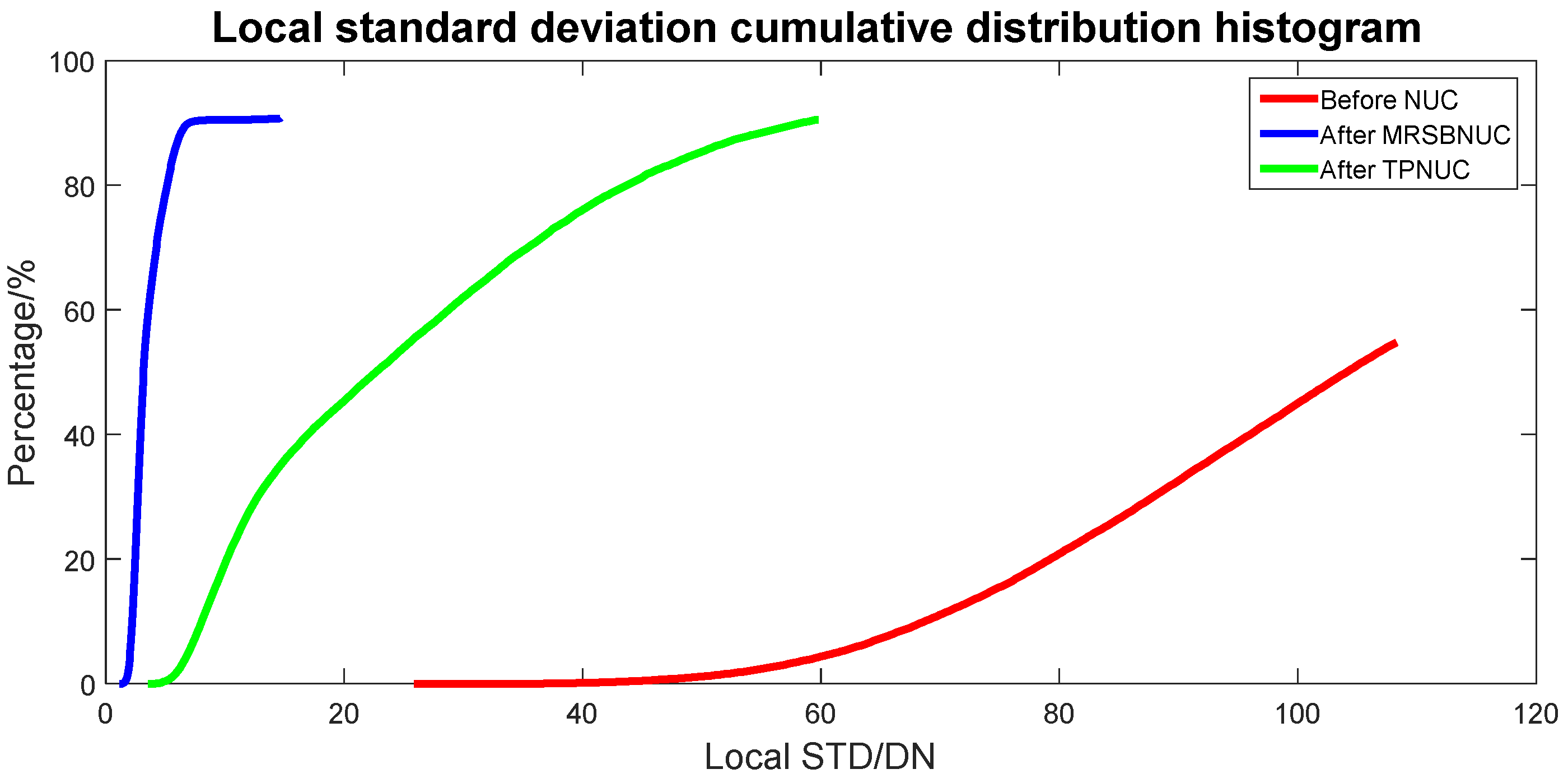
2.4. Uniformity Evaluation
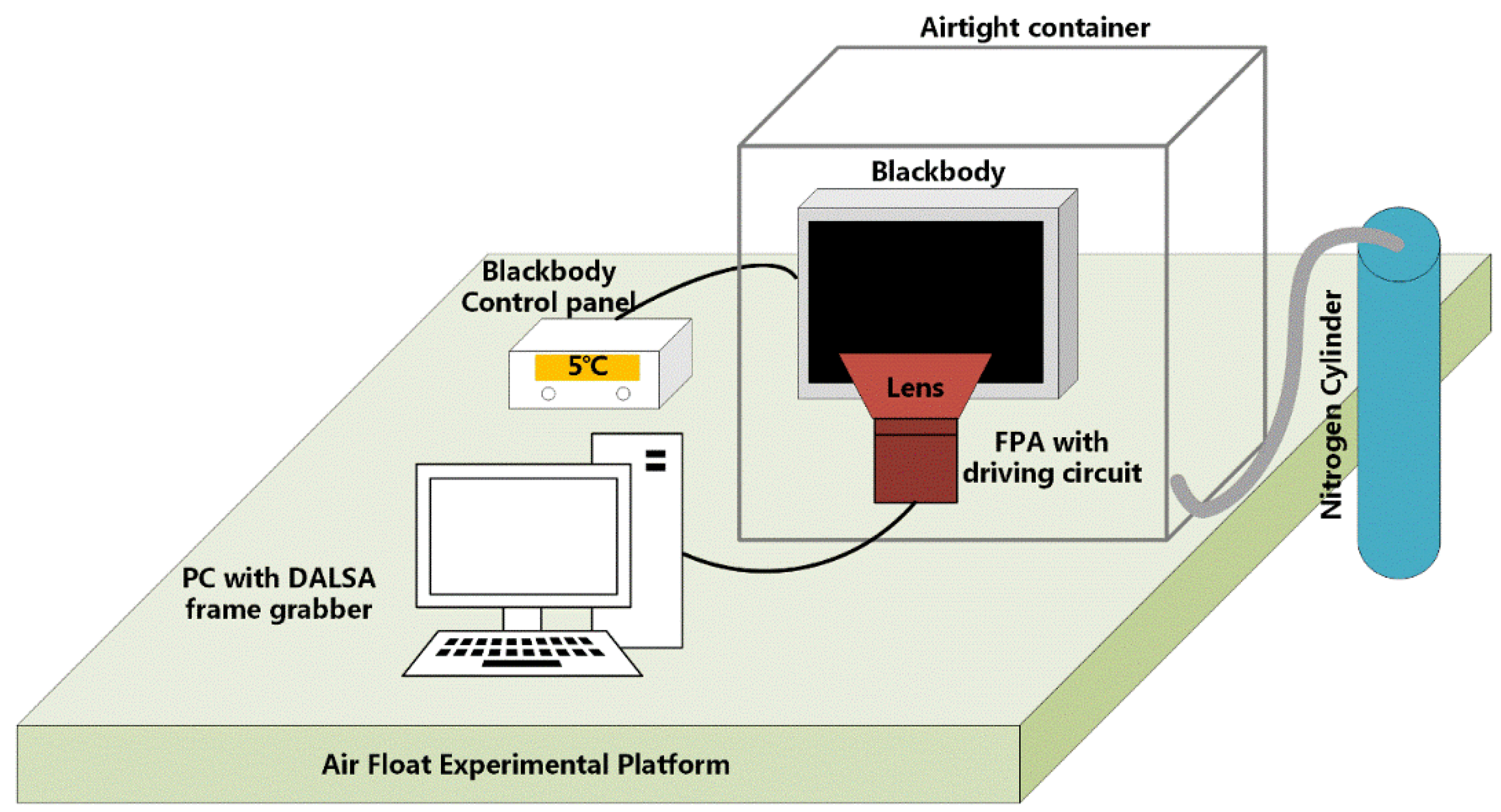
2.5. Experiments
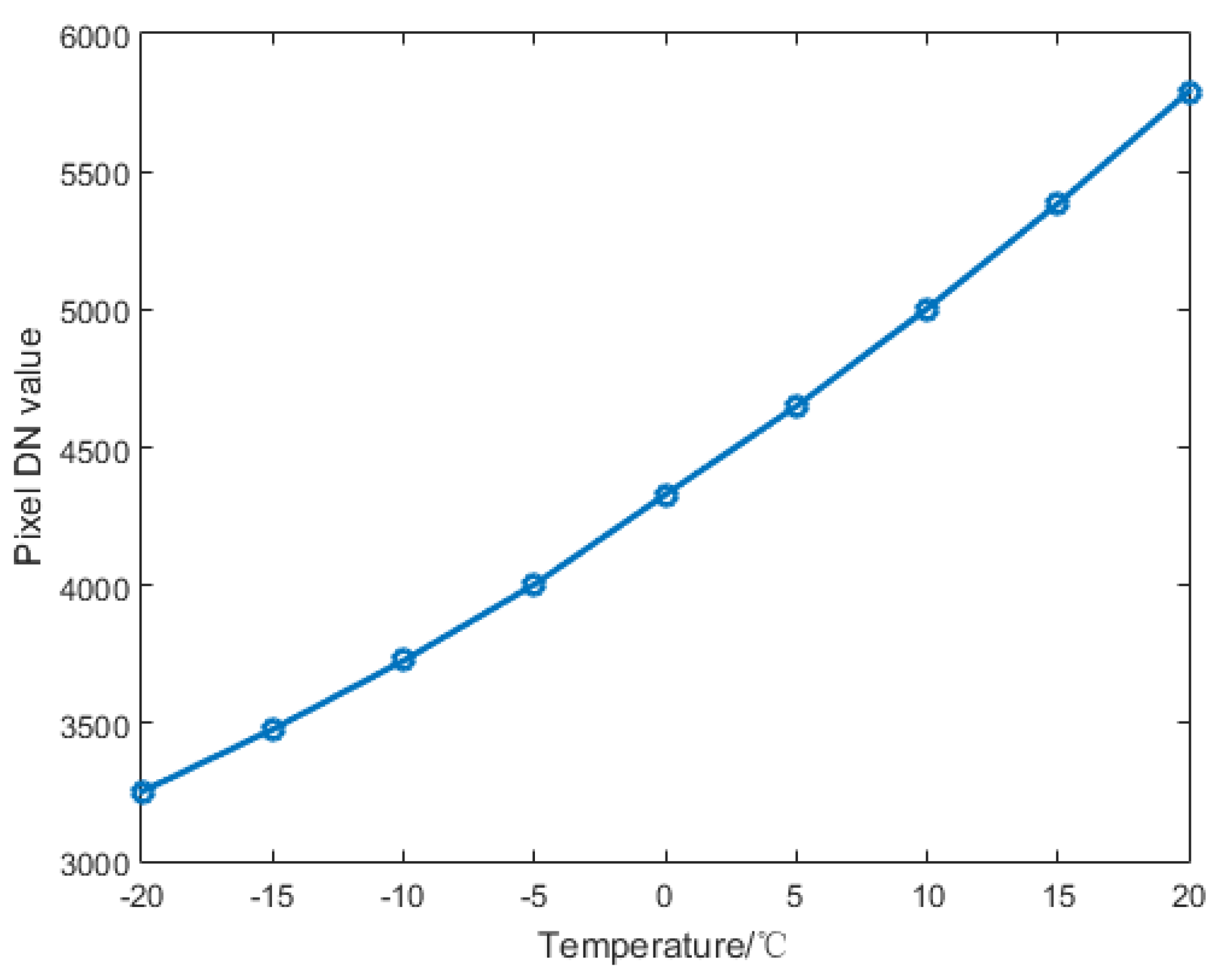
2.5.1. Laboratory Calibration
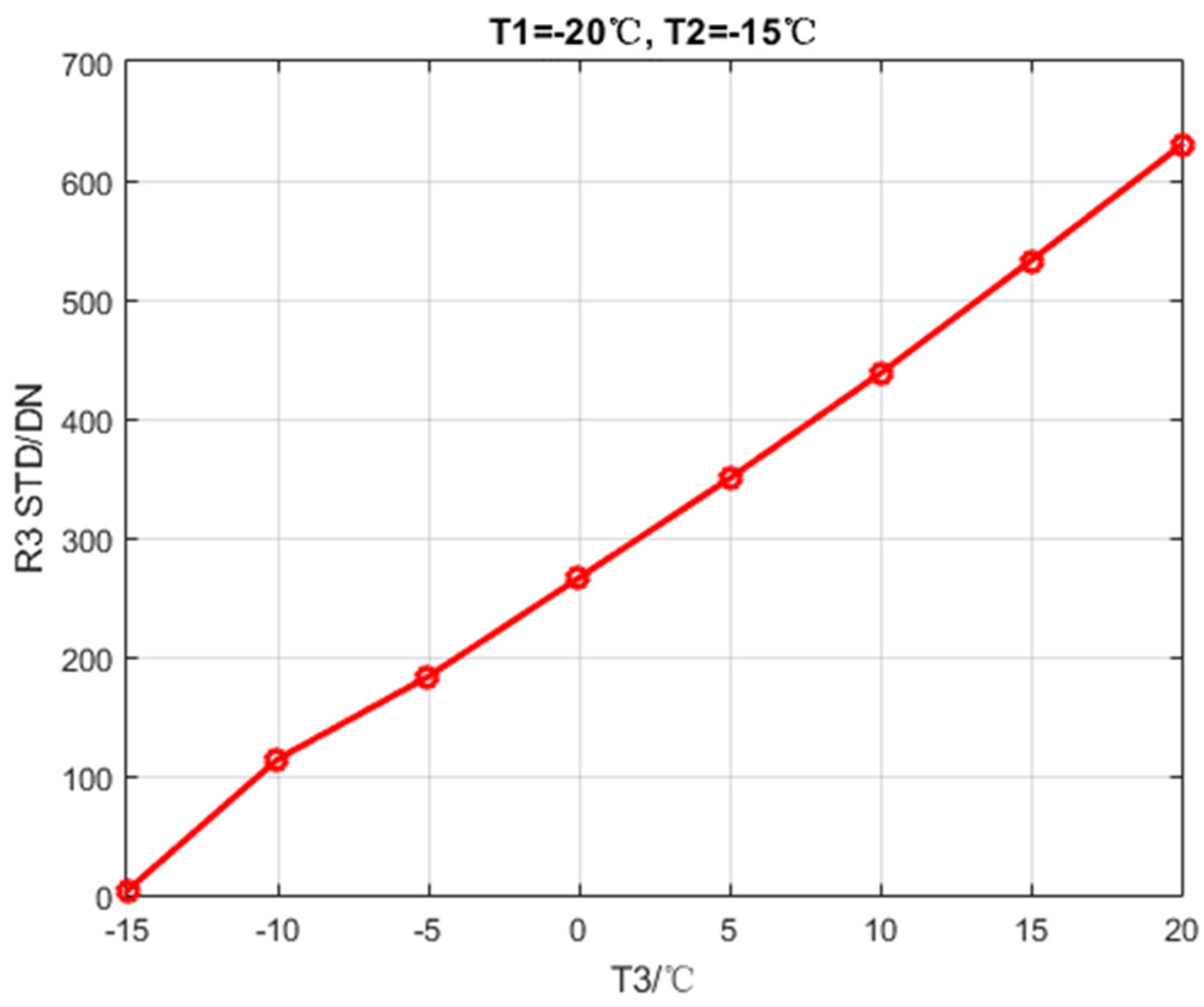
- Experiment 1: T3 Falls Outside the Range of T1 and T2
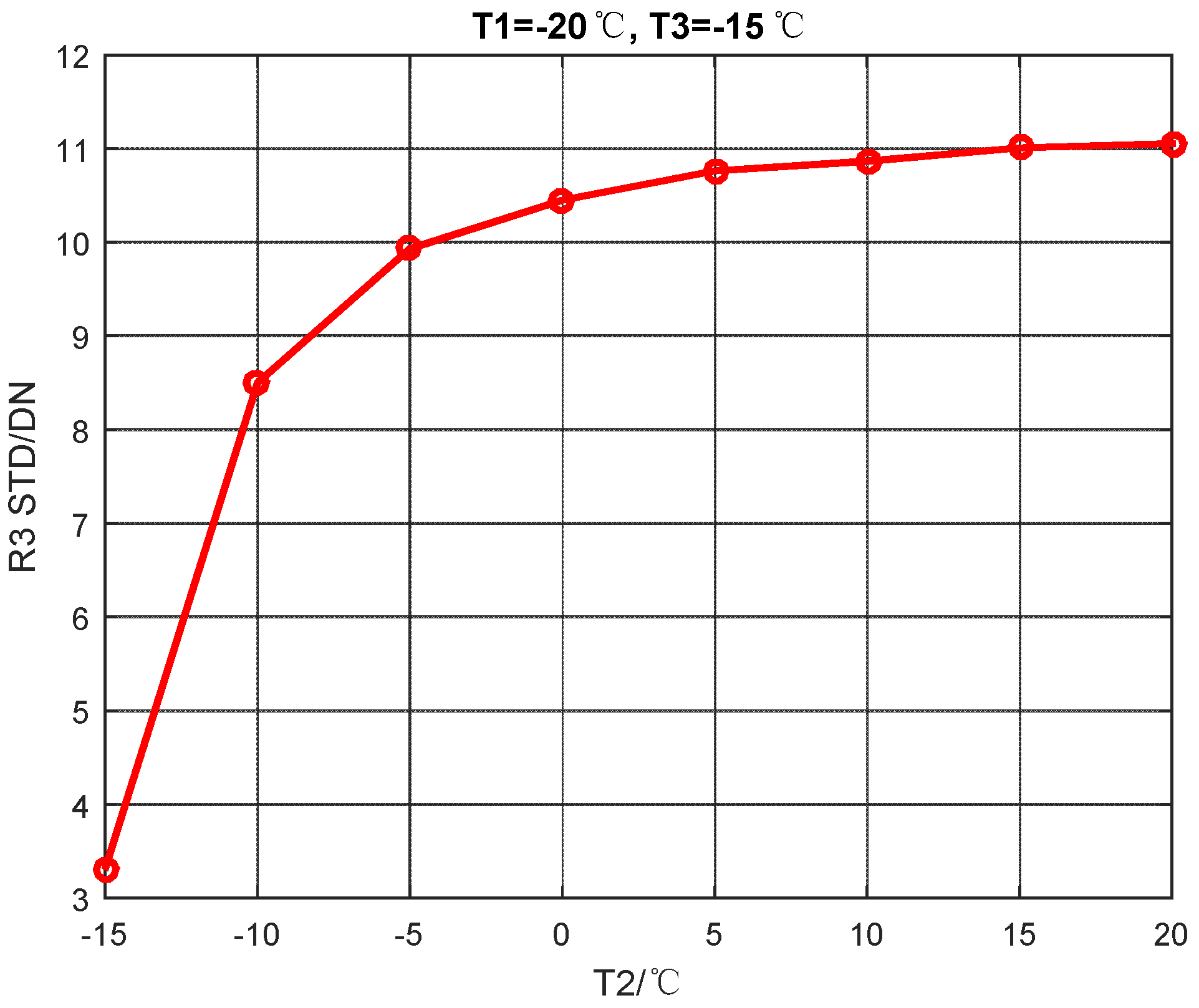
- Experiment 2: T3 Falls between T1 and T2
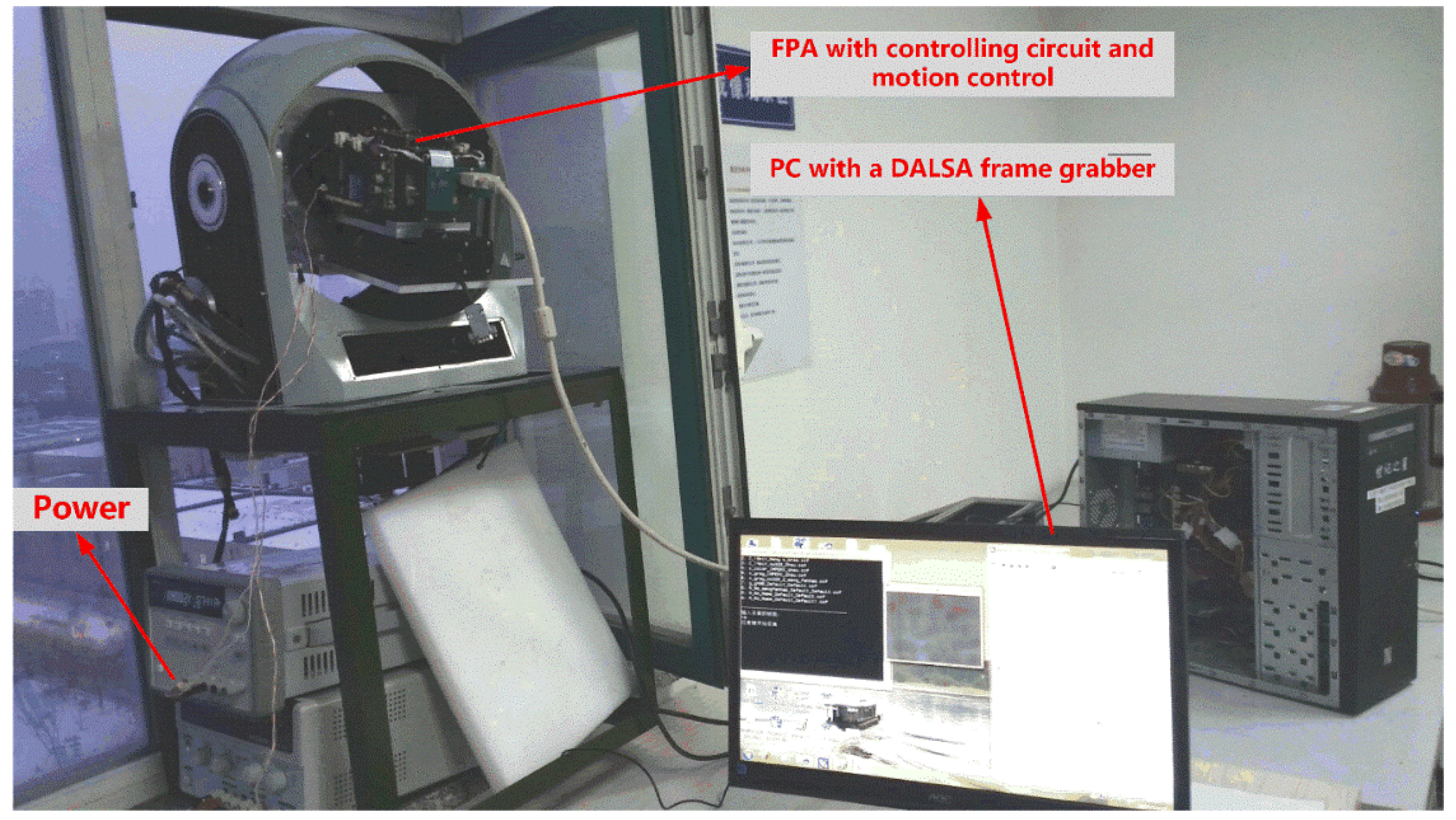
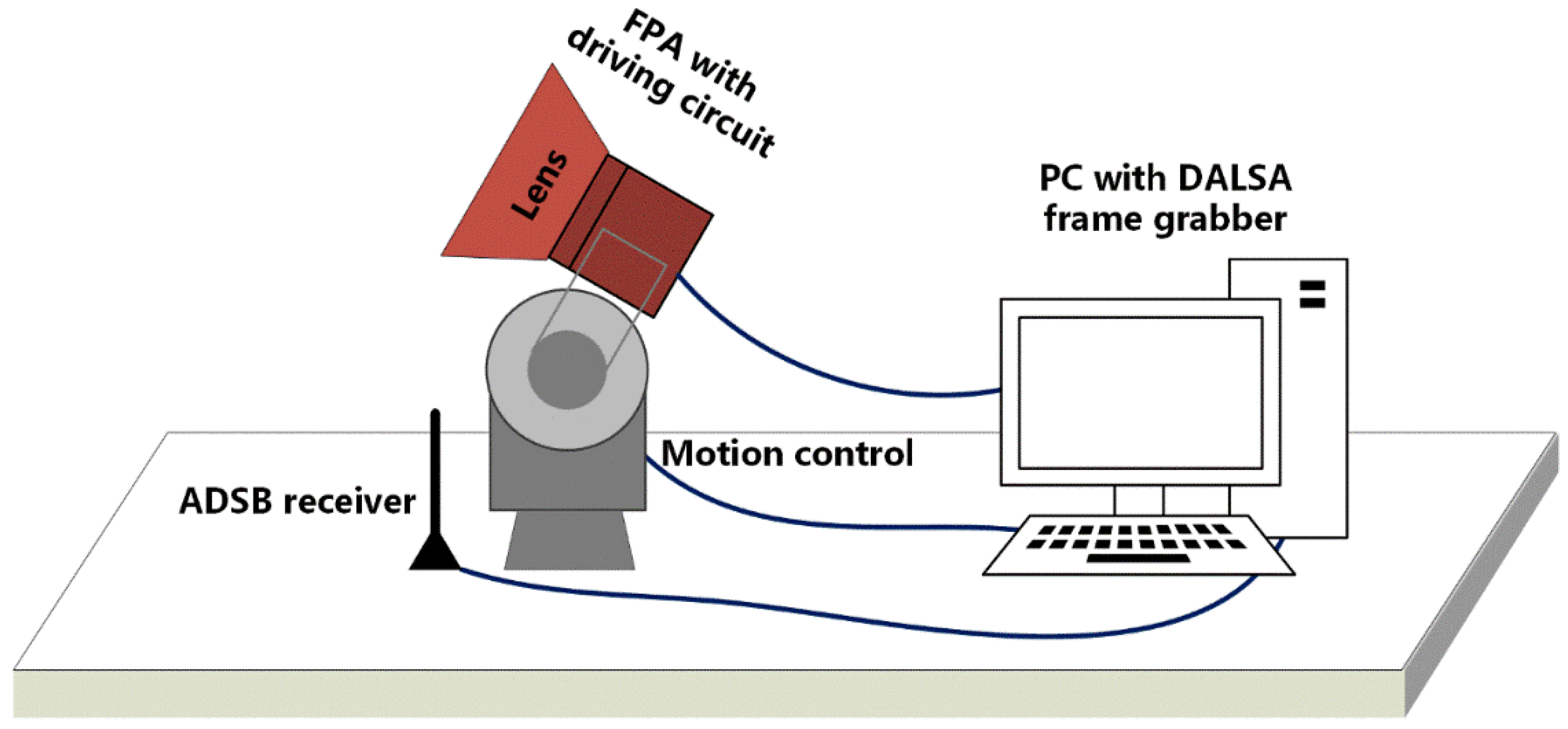
2.5.2. Scene-Based Experiment
2.5.3. Target Detection
3. Results
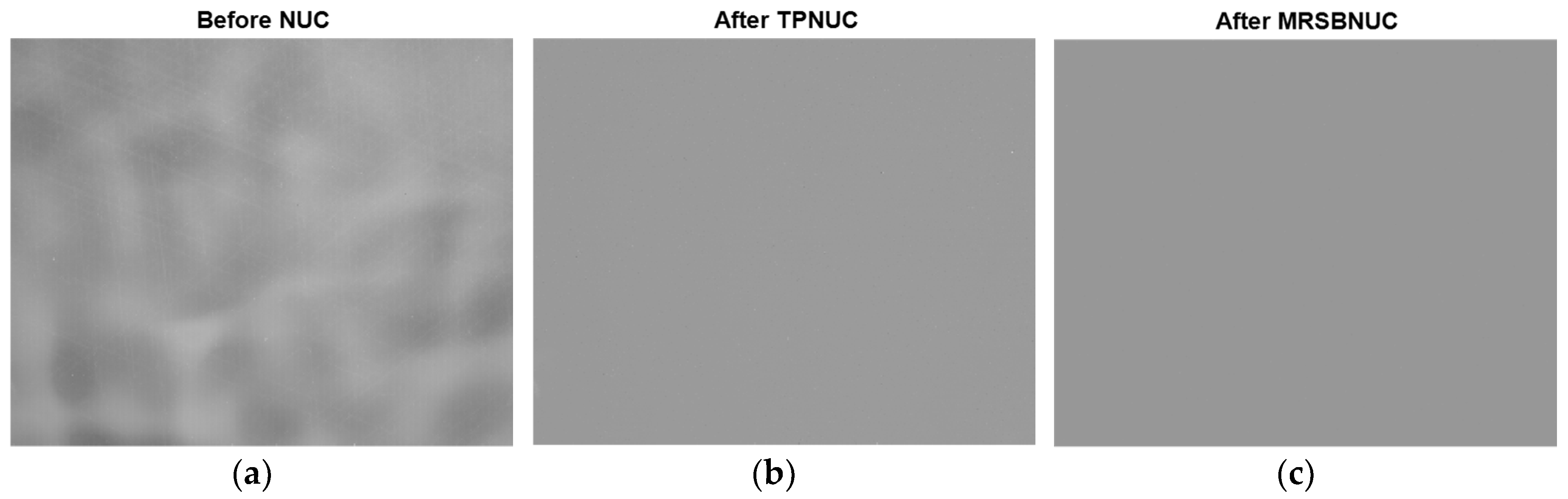
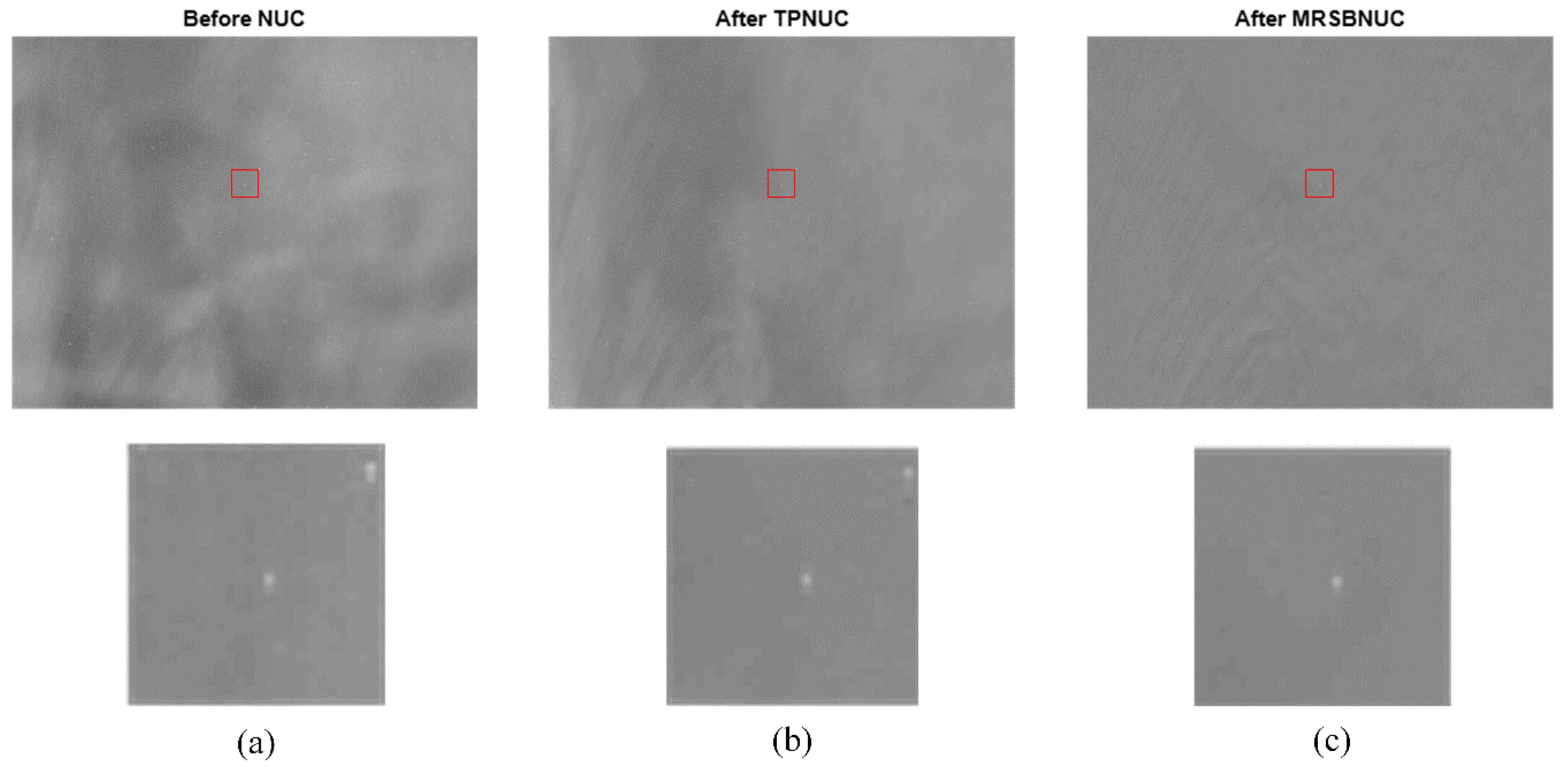
3.1. Clear Sky Scene
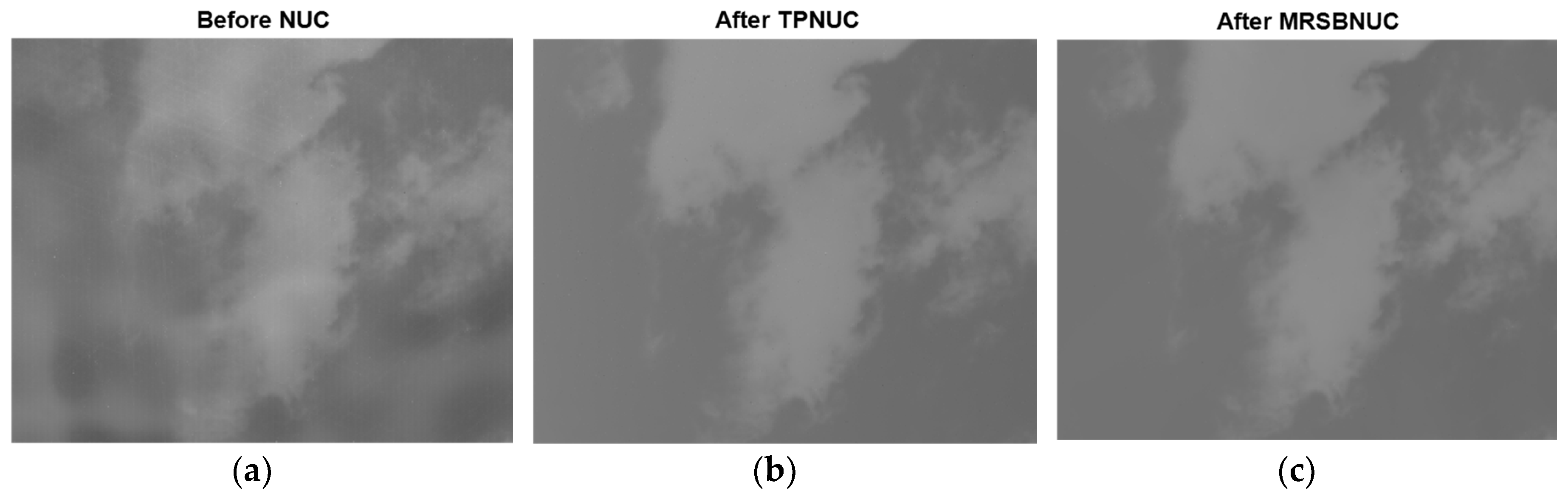
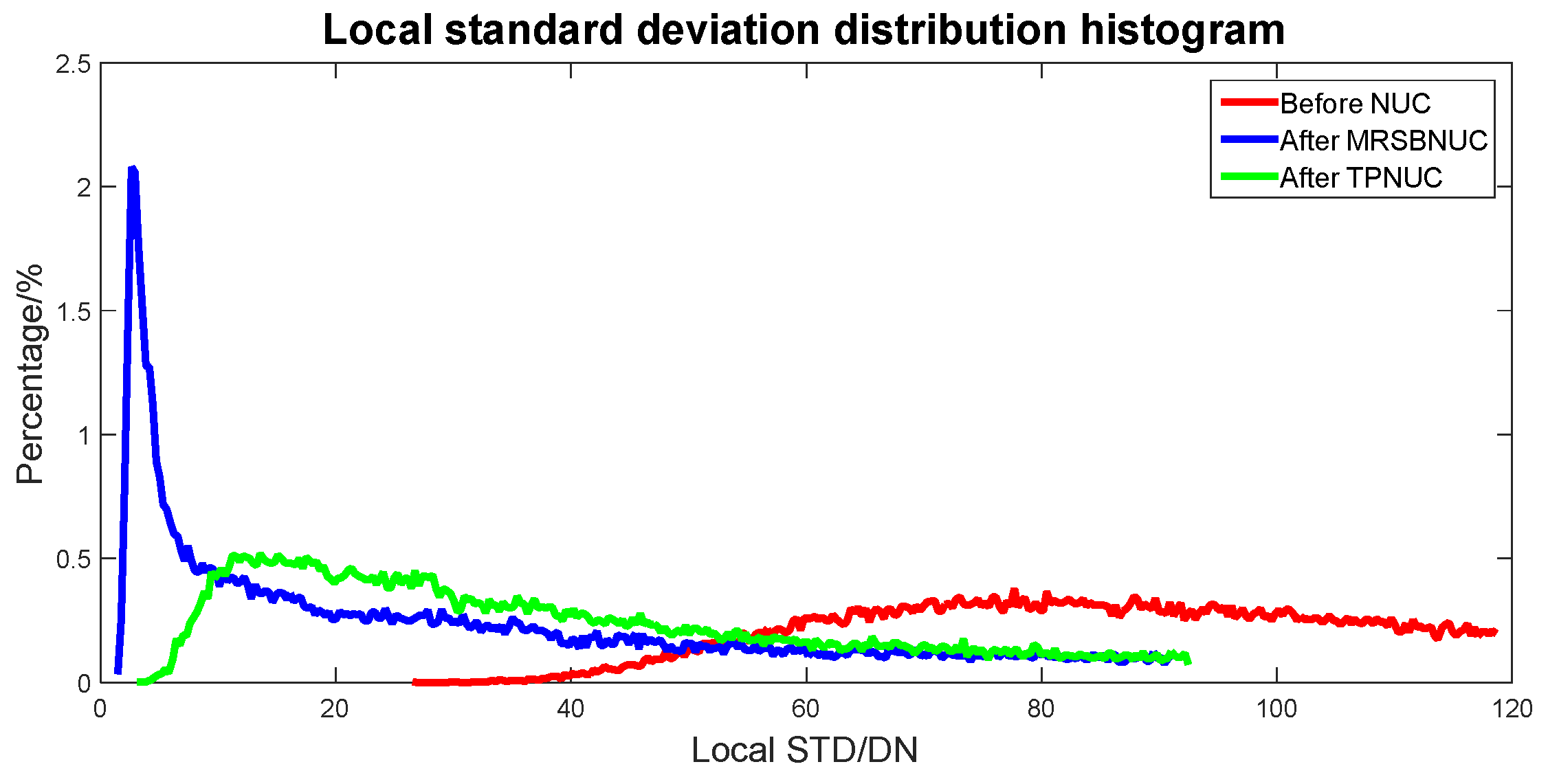
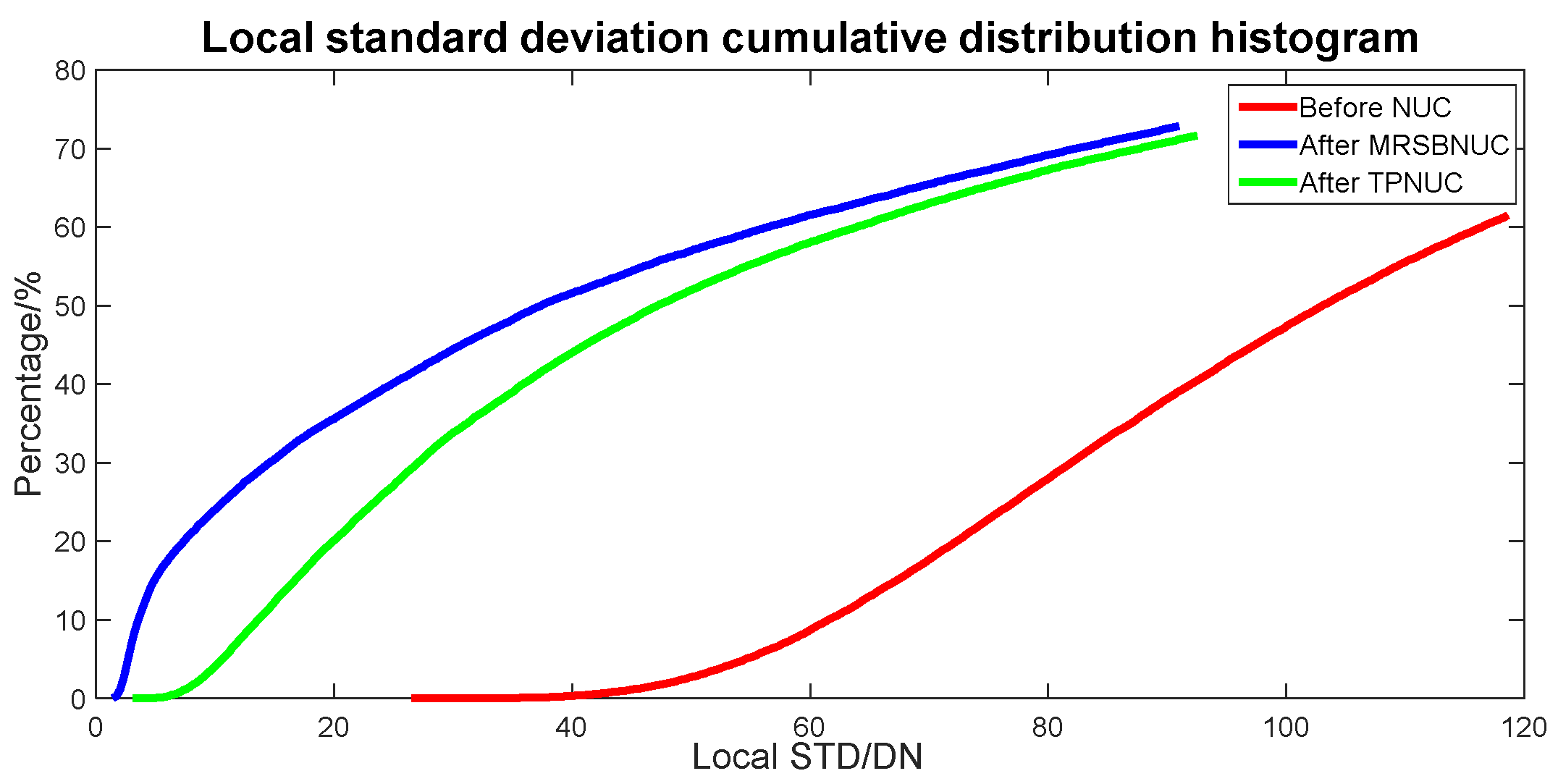
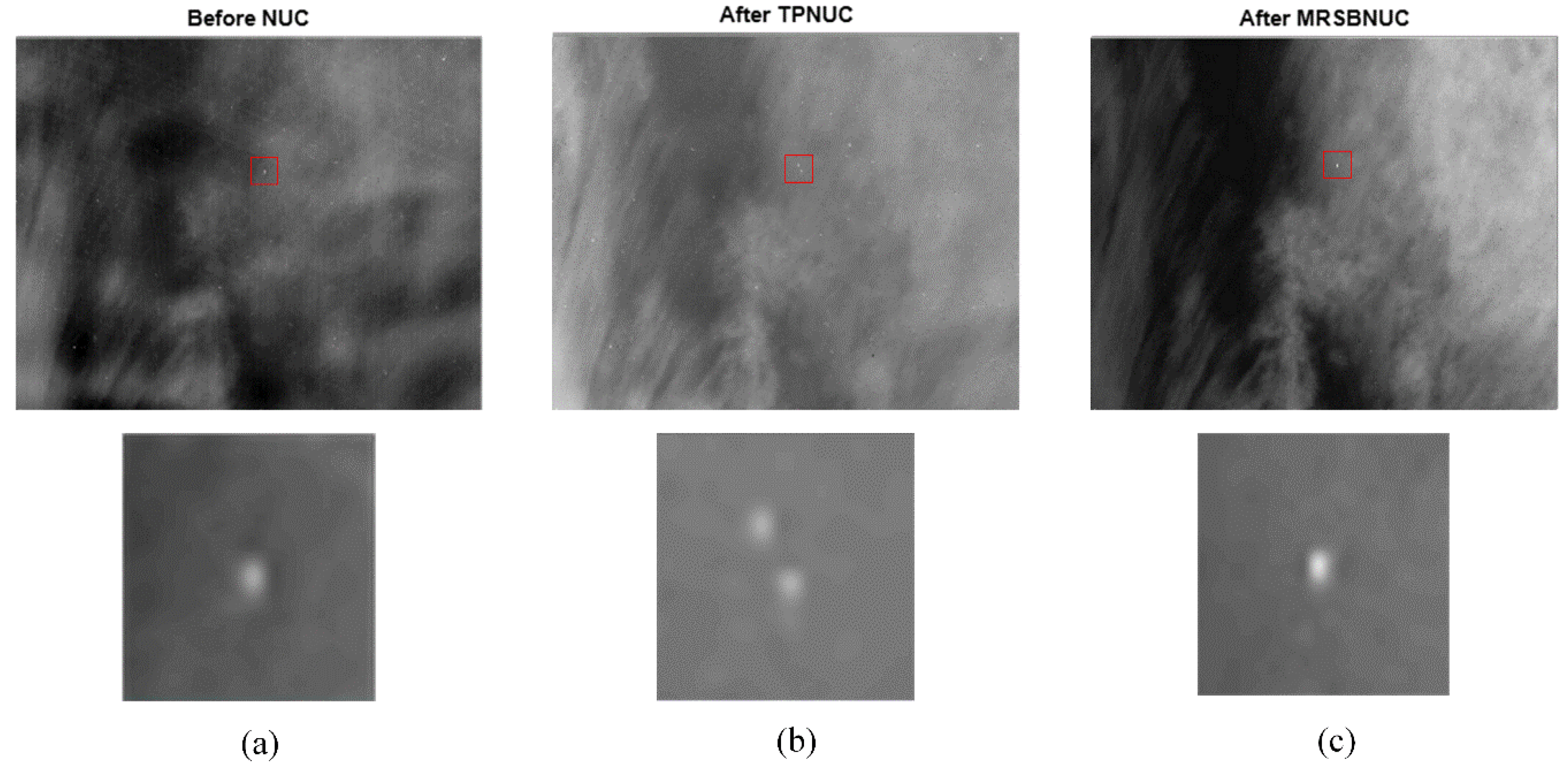
3.2. Sky Scene with Clouds
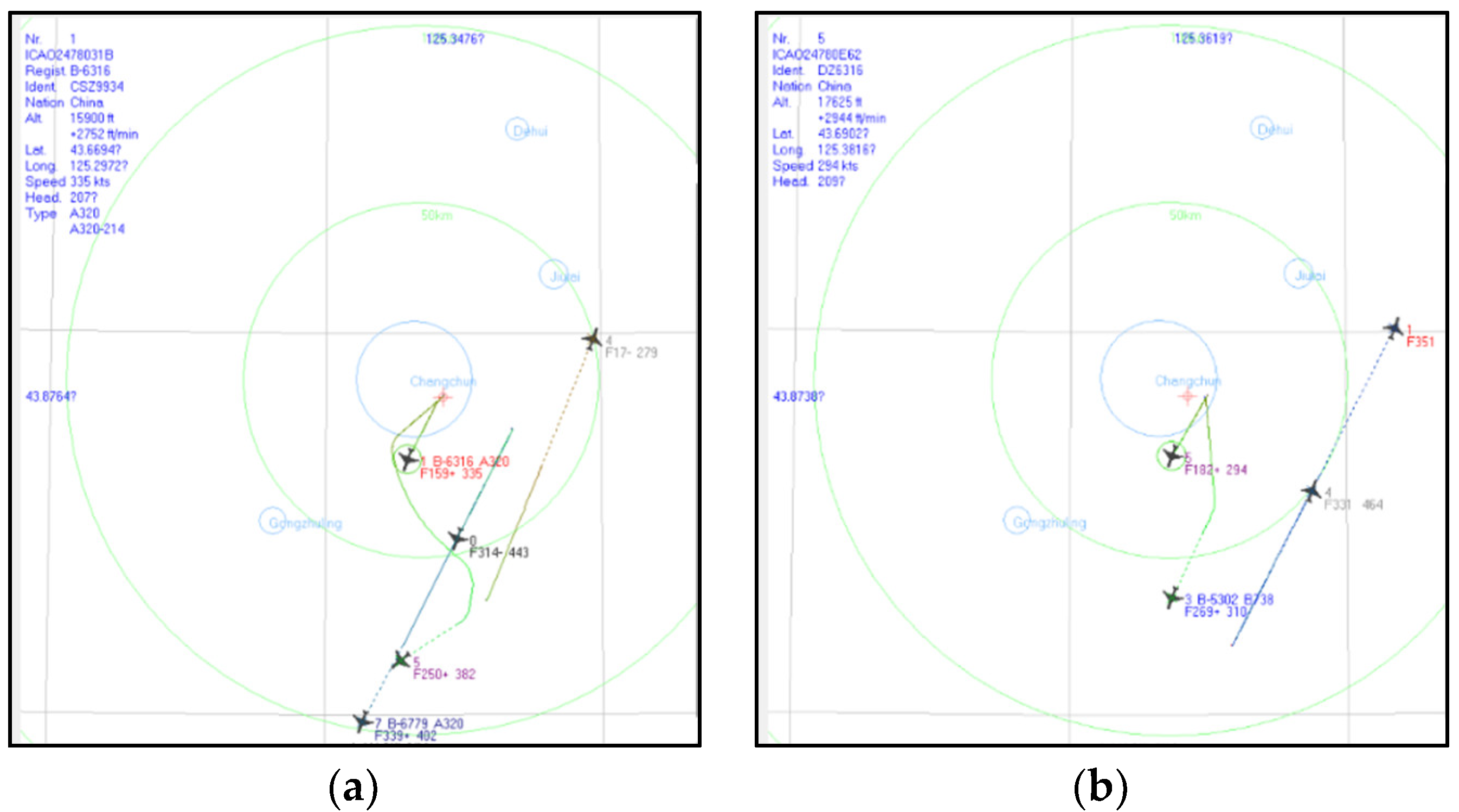
3.3. Target Detection
4. Discussion
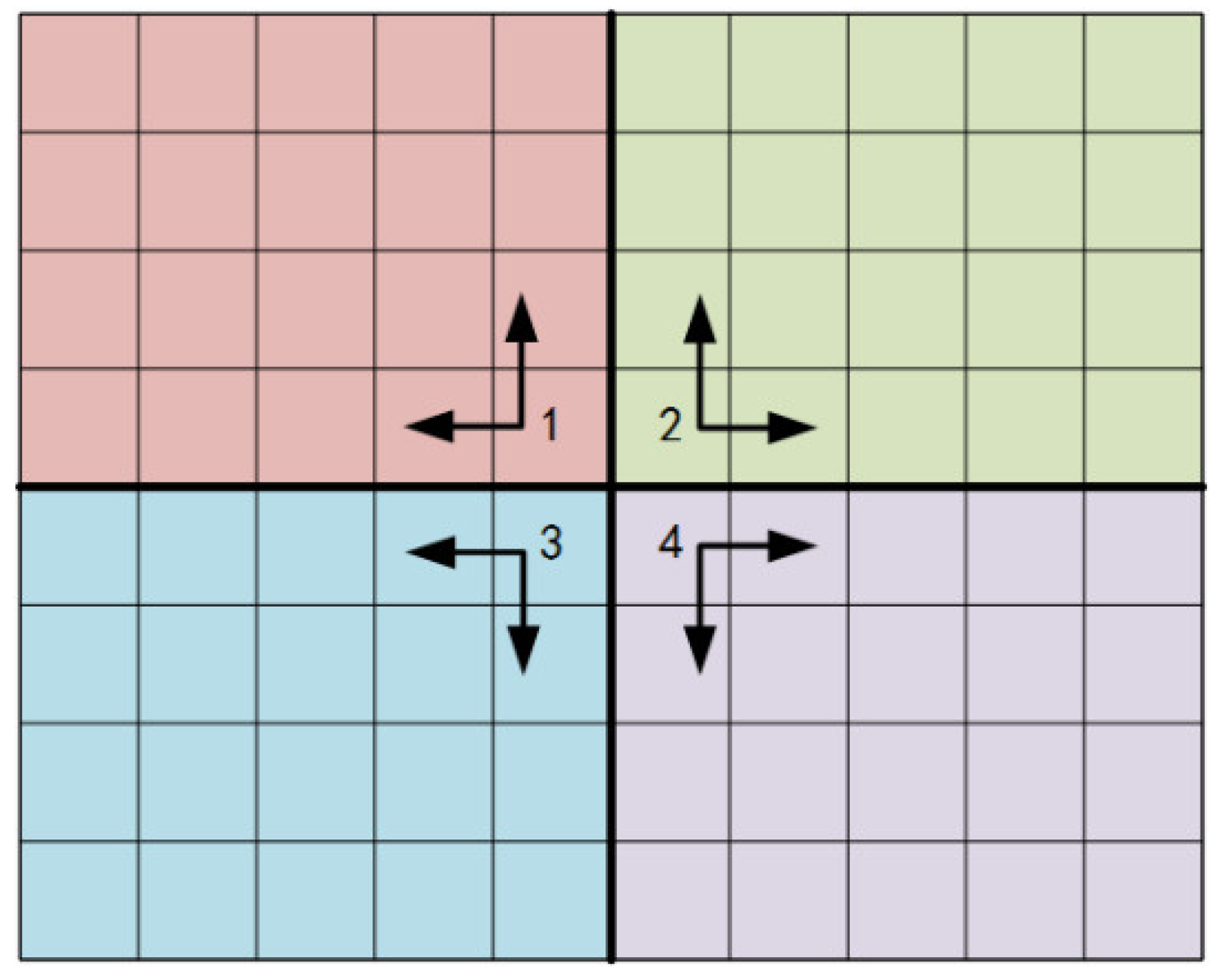
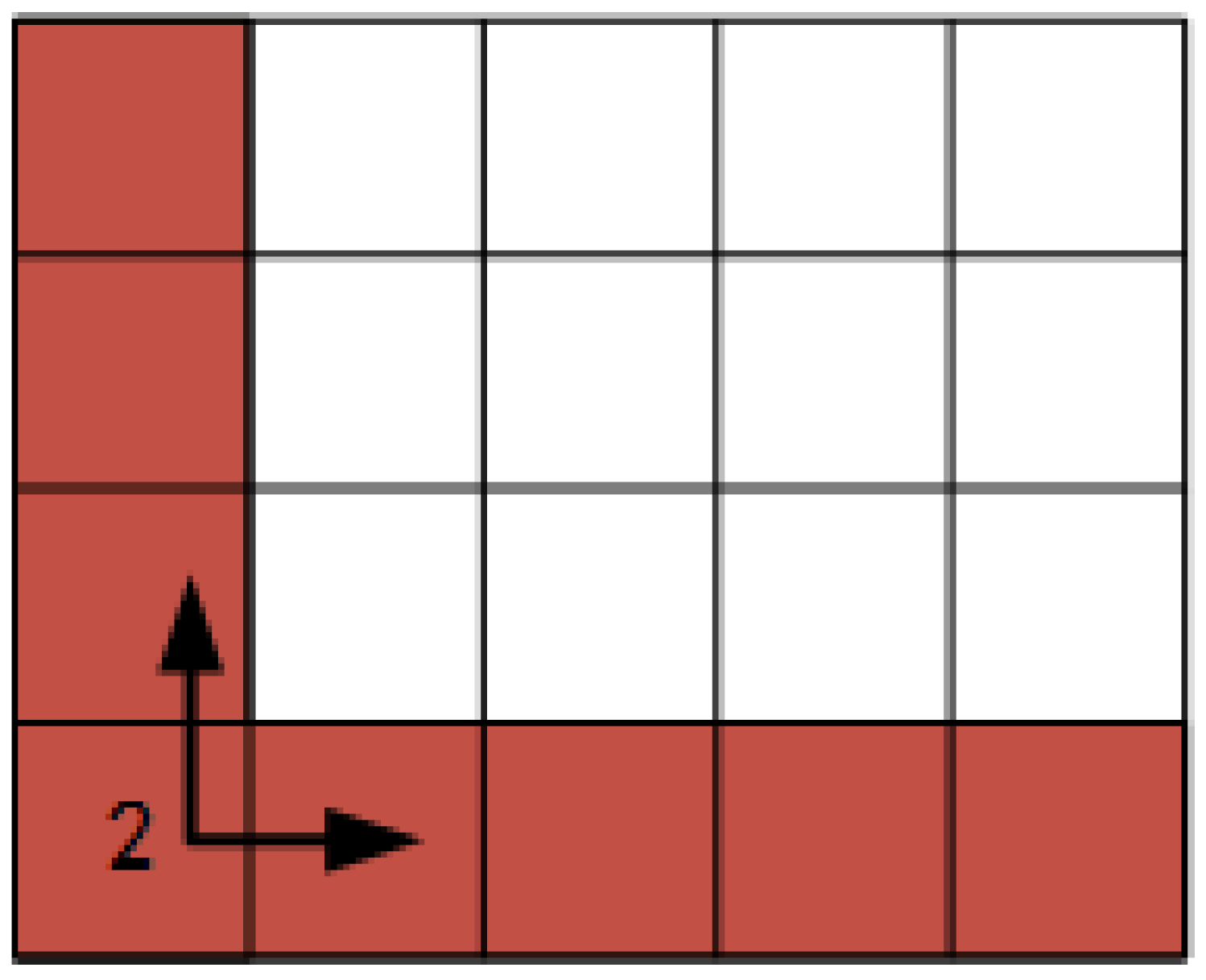
4.1. Why Does the MRSBUNC Method Calculate from the Center of the Image (Divided into Four Regions)?
4.2. Interpretation of Results
4.3. Future Research
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Qi, S.X.; Ming, D.L.; Ma, J.; Sun, X.; Tian, J.W. Robust method for infrared small-target detection based on Boolean map visual theory. Appl. Opt. 2014, 53, 3929–3940. [Google Scholar] [CrossRef] [PubMed]
- Zhang, T.; Cui, C.; Fu, W.; Huang, H.; Cheng, H. Improved small moving target detection method in infrared sequences under a rotational background. Appl. Opt. 2018, 57, 9279–9286. [Google Scholar]
- Liu, R.; Wang, D.J.; Jia, P.; Sun, H. An omnidirectional morphological method for aerial point target detection based on infrared dual-band model. Remote Sens. 2018, 10, 1054. [Google Scholar] [CrossRef]
- Zhang, Q.; Qin, H.; Yan, X.; Yang, S.; Yang, T. Single infrared image-based stripe nonuniformity correction via a two-stage filtering method. Sensors 2018, 18, 4299. [Google Scholar] [CrossRef]
- Wu, Z.M.; Wang, X. Non-uniformity correction for medium wave infrared focal plane array-based compressive imaging. Opt. Express 2020, 28, 8541–8559. [Google Scholar] [CrossRef] [PubMed]
- Huo, L.; Zhou, D.; Wang, D.; Liu, R.; He, B. Staircase-scene-based nonuniformity correction in aerial point target detection systems. Appl. Opt. 2016, 55, 7149–7156. [Google Scholar] [CrossRef]
- Wang, E.D.; Jiang, P.; Li, X.P.; Cao, H. Infrared stripe correction algorithm based on wavelet decomposition and total variation-guided filtering J. Eur. Opt. Soc. Rapid Publ. 2020, 16, 1. [Google Scholar] [CrossRef]
- Zhou, D.; Wang, D.; Huo, L.; Liu, R.; Jia, P. Scene-based nonuniformity correction for airborne point target detection systems. Opt. Express 2017, 25, 14210–14226. [Google Scholar] [CrossRef]
- Chen, Q. The Status and Development Trend of Infrared Image Processing Technology. Infrared Technol. 2013, 35, 311–318. [Google Scholar]
- Dereniak, E.L. Linear theory of nonuniformity correction in infrared staring sensors. Opt. Eng. 1993, 32, 1854–1859. [Google Scholar]
- Wang, Y.; Chen, J.; Liu, Y.; Xue, Y. Study on two-point multi-section IRFPA nonuniformity correction algorithm. Infrared Millim. Waves 2003, 22, 415–418. [Google Scholar]
- Zhou, H.; Liu, S.; Lai, R.; Wang, D.; Cheng, Y. Solution for the nonuniformity correction of infrared focal plane arrays. Appl. Opt. 2005, 44, 2928–2932. [Google Scholar] [CrossRef] [PubMed]
- Harris, J.G.; Chiang, Y.M. Nonuniformity correction of infrared image sequences using the constant-statistics constraint. IEEE Trans. Image Process. 1999, 8, 1148–1151. [Google Scholar] [CrossRef] [PubMed]
- Scribner, D.A.; Sarkady, K.A.; Kruer, M.R.; Caulfield, J.T.; Hunt, J.D.; Herman, C. Adaptive nonuniformity correction for IR focal-plane arrays using neural networks. In Proceedings of the Infrared Sensors: Detectors, Electronics, and Signal Processing, San Diego, CA, USA, 24–26 July 1991; International Society for Optics and Photonics: San Diego, CA, USA, 1991; pp. 100–110. [Google Scholar]
- Torres, S.N.; Hayat, M.M. Kalman filtering for adaptive nonuniformity correction in infrared focal-plane arrays. Opt. Soc. Am. A 2003, 20, 470–480. [Google Scholar] [CrossRef]
- Sun, Z.; Chang, S.; Zhu, W. Radiometric calibration method for large aperture infrared system with broad dynamic range. Appl. Opt. 2015, 54, 4659–4666. [Google Scholar] [CrossRef]
- Lv, B.L.; Tong, S.F.; Liu, Q.Y.; Sun, H.J. Statistical scene-based non-uniformity correction method with interframe registration. Sensors 2019, 19, 5395. [Google Scholar] [CrossRef]
- Qian, W.; Chen, Q.; Bai, J.; Gu, G. Adaptive convergence nonuniformity correction algorithm. Appl. Opt. 2011, 50, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Hardie, R.C.; Baxley, F.; Brys, B.; Hytla, P.C. Scene-based nonuniformity correction with reduced ghosting using a gated LMS algorithm. Opt. Express 2009, 17, 14918–14933. [Google Scholar] [CrossRef]
- Leng, H.; Yi, B.; Xie, Q.; Tang, L.; Gong, Z. Adaptive nonuniformity correction for infrared images based on temporal moment matching. Acta Opt. Sin. 2015, 35, 0410003. [Google Scholar] [CrossRef]
- Boutemedjet, A.; Deng, C.; Zhao, B. Robust approach for nonuniformity correction in infrared focal plane array. Sensors 2016, 16, 1890. [Google Scholar] [CrossRef]
- Li, Y.; Jin, W.; Zhu, J.; Zhang, X.; Li, S. An adaptive deghosting method in neural network-based infrared detectors nonuniformity correction. Sensors 2018, 18, 211. [Google Scholar]
- Hardie, R.C.; Hayat, M.M.; Armstrong, E.; Yasuda, B. Scene-based nonuniformity correction with video sequences and registration. Appl. Opt. 2000, 39, 1241–1250. [Google Scholar] [CrossRef] [PubMed]
- Zuo, C.; Chen, Q.; Gu, G.; Sui, X. Scene-based nonuniformity correction algorithm based on interframe registration. Opt. Soc. Am. 2011, 28, 1164–1176. [Google Scholar] [CrossRef] [PubMed]
- Zeng, J.; Sui, X.; Gao, H. Adaptive image-registration-based nonuniformity correction algorithm with ghost artifacts eliminating for infrared focal plane arrays. IEEE Photonics J. 2015, 7, 1–16. [Google Scholar] [CrossRef]
- Dai, S.; Li, J.; Zhang, T.; Huang, J. Blind points detection and compensation. In Infrared Focal Plane Array Imaging and Its Non-Uniformity Correction Technology, 1st ed.; Yanfen, Z., Ed.; Science Press: Beijing, China, 2015; Volume 3, pp. 96–105. (In Chinese) [Google Scholar]
- Leathers, R.A.; Downes, T.V.; Priest, R.G. Scene-based nonuniformity corrections for optical and SWIR pushbroom sensors. Opt. Express 2005, 13, 5136–5150. [Google Scholar] [CrossRef]
- Wang, X.; Wang, C.; Zhang, Y. Research on SNR of Point Target Image. Electron. Opt. Control 2010, 17, 18–21. (In Chinese) [Google Scholar]
- Liu, R.; Wang, D.; Zhang, L.; Zhou, D.; Jia, P.; Ding, P. Non-uniformity correction and point target detection based on gradient sky background. J. Jilin Univ. Eng. Technol. Ed. 2017, 47, 1625–1633. (In Chinese) [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Response band (μm) | 7.7–9.3 |
| Pixels | 640 × 512 |
| Pixel size (μm) | 15 |
| NEDT (mK) | 20 mk@300 k@Ti = 300 μs |
| Camera output resolution (bit) | 14 |
| Operating temperature (K) | 77 |
| Full frame rate (f/s) | 100 |
| Focal length (mm) | 60–300 |
| F/# | 4 |
| T1 (°C) | T2 (°C) | T3 (°C) | Global STD after NUC |
|---|---|---|---|
| −20 | −15 | −15 | 3.30 |
| −20 | −15 | −10 | 113.93 |
| −20 | −15 | −5 | 183.44 |
| −20 | −15 | 0 | 266.28 |
| −20 | −15 | 5 | 349.71 |
| −20 | −15 | 10 | 437.89 |
| −20 | −15 | 15 | 532.52 |
| −20 | −15 | 20 | 629.66 |
| T1 (°C) | T2 (°C) | T3 (°C) | Global STD after NUC |
|---|---|---|---|
| −20 | −15 | −15 | 3.30 |
| −20 | −10 | −15 | 8.51 |
| −20 | −5 | −15 | 9.93 |
| −20 | 0 | −15 | 10.44 |
| −20 | 5 | −15 | 10.76 |
| −20 | 10 | −15 | 10.86 |
| −20 | 15 | −15 | 11.00 |
| −20 | 20 | −15 | 11.05 |
| Item | Target 1 SNR | Target 2 SNR | Target 1 SNR Increased by (Times) | Target 2 SNR Increased by (Times) |
|---|---|---|---|---|
| Before NUC | 2.89 | 3.56 | —— | —— |
| TPNUC | 5.42 | 5.68 | 1.88 | 1.60 |
| MRSBNUC | 11. 37 | 9.83 | 3.93 | 2.76 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, S.; Wang, D.; Zhang, T. A Median-Ratio Scene-Based Non-Uniformity Correction Method for Airborne Infrared Point Target Detection System. Sensors 2020, 20, 3273. https://doi.org/10.3390/s20113273
Ding S, Wang D, Zhang T. A Median-Ratio Scene-Based Non-Uniformity Correction Method for Airborne Infrared Point Target Detection System. Sensors. 2020; 20(11):3273. https://doi.org/10.3390/s20113273
Chicago/Turabian StyleDing, Shuai, Dejiang Wang, and Tao Zhang. 2020. "A Median-Ratio Scene-Based Non-Uniformity Correction Method for Airborne Infrared Point Target Detection System" Sensors 20, no. 11: 3273. https://doi.org/10.3390/s20113273
APA StyleDing, S., Wang, D., & Zhang, T. (2020). A Median-Ratio Scene-Based Non-Uniformity Correction Method for Airborne Infrared Point Target Detection System. Sensors, 20(11), 3273. https://doi.org/10.3390/s20113273