Application of Ultrasonic Guided Waves for Inspection of High Density Polyethylene Pipe Systems



Abstract
1. Introduction
2. Theoretical Background
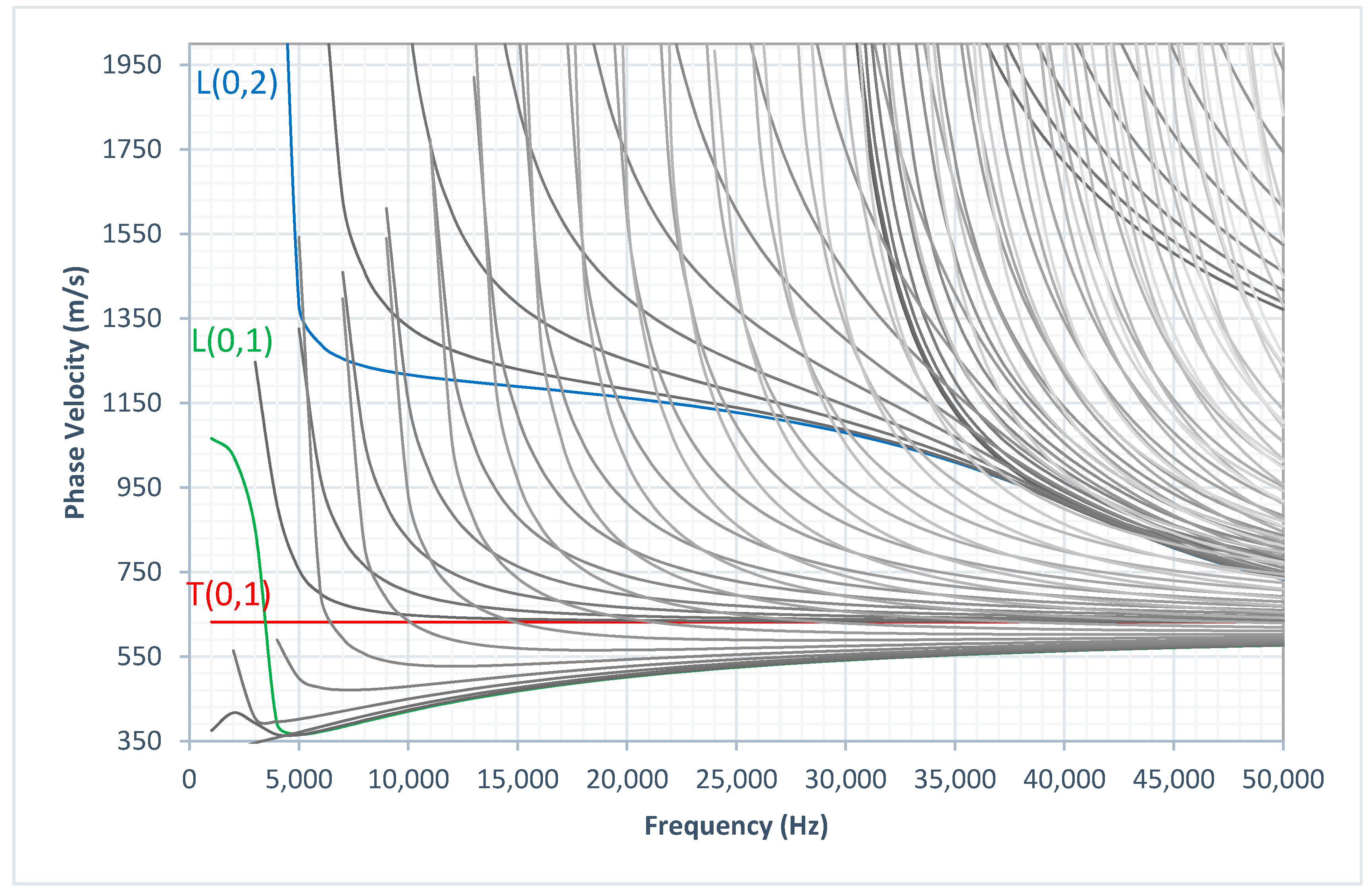
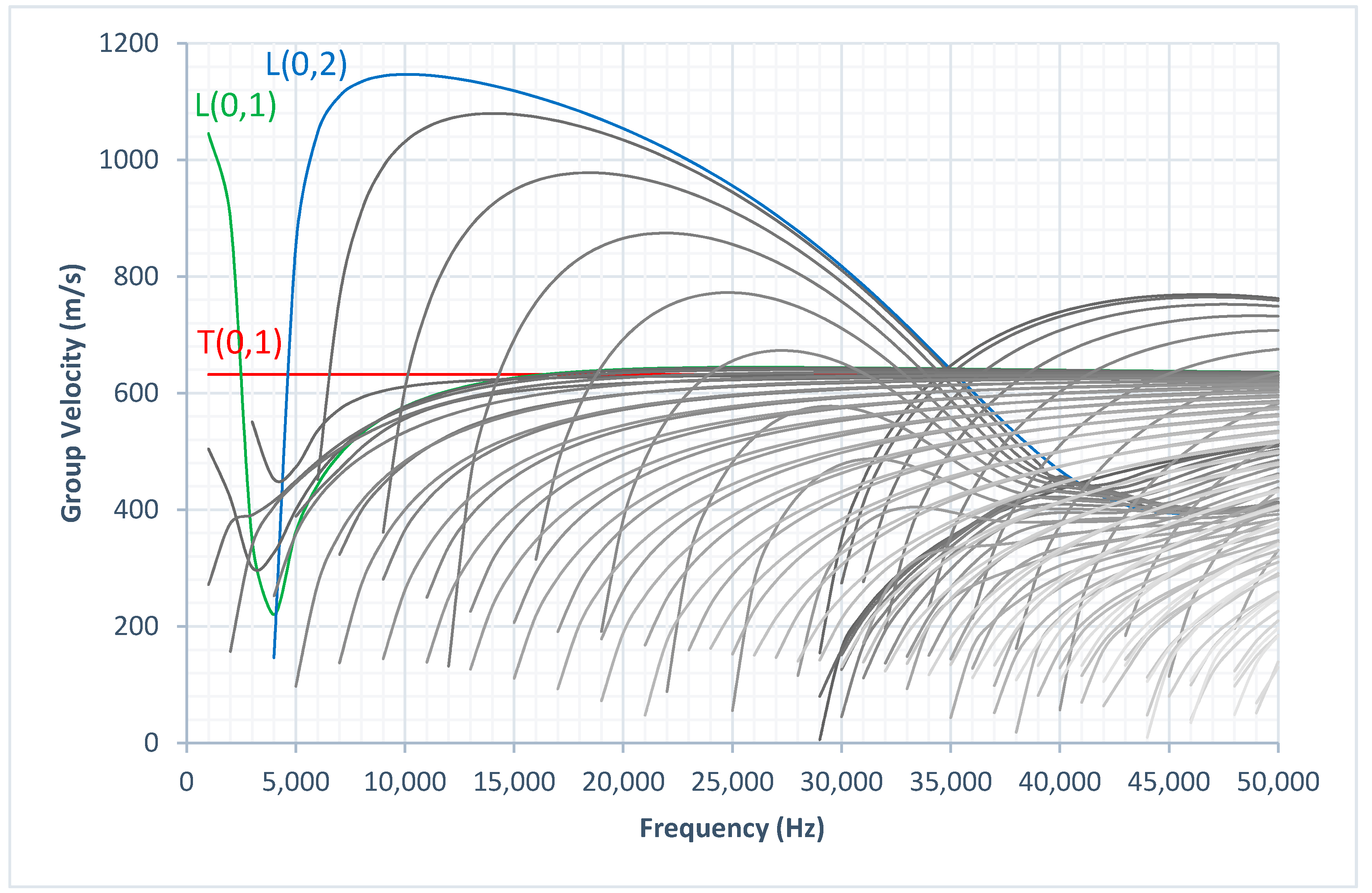
2.1. Elastic Waves in Solid Media
2.2. Thermoplastic Pipe Inspection
3. Laboratory Experiments
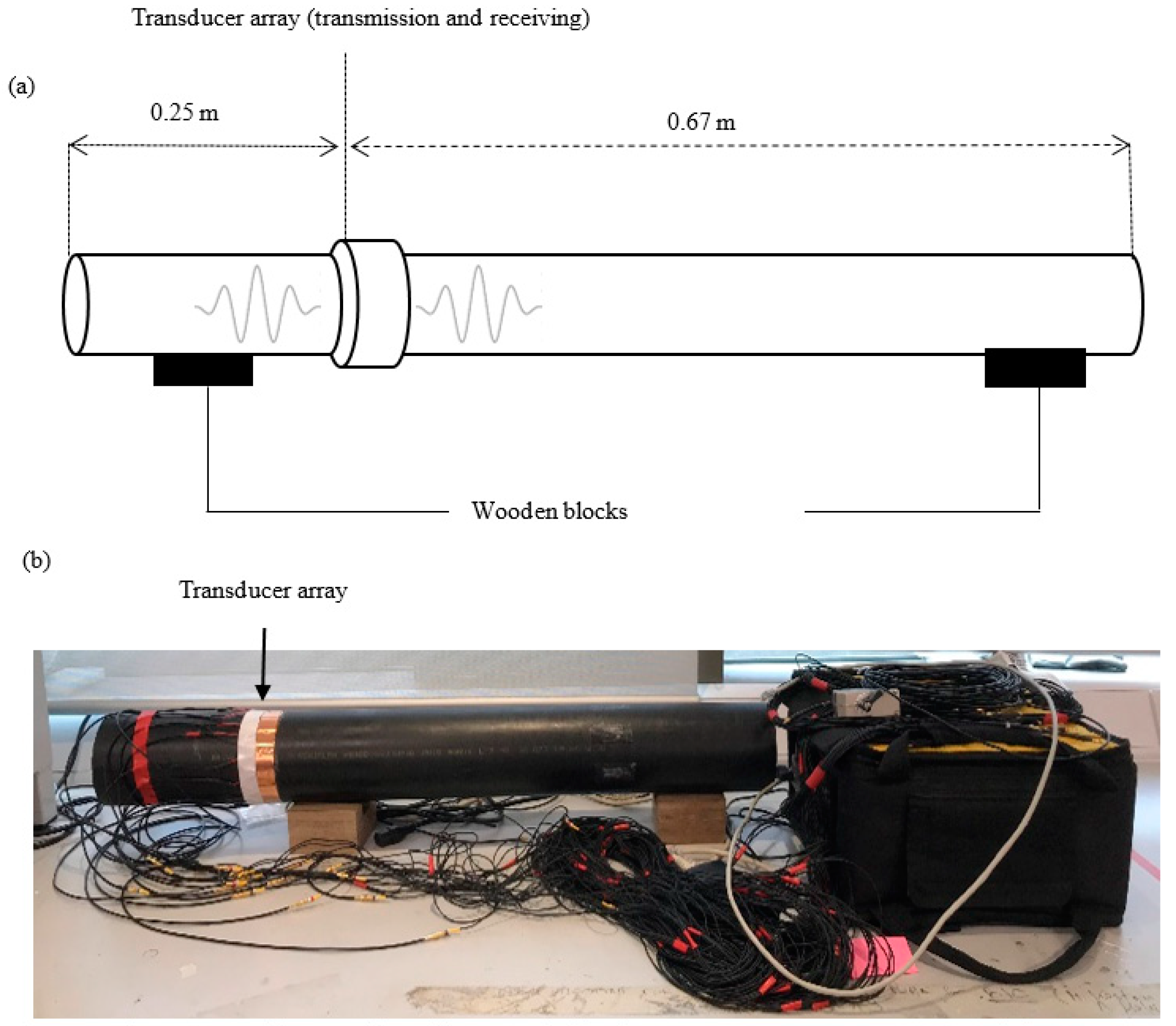
3.1. Experimental Set-Up
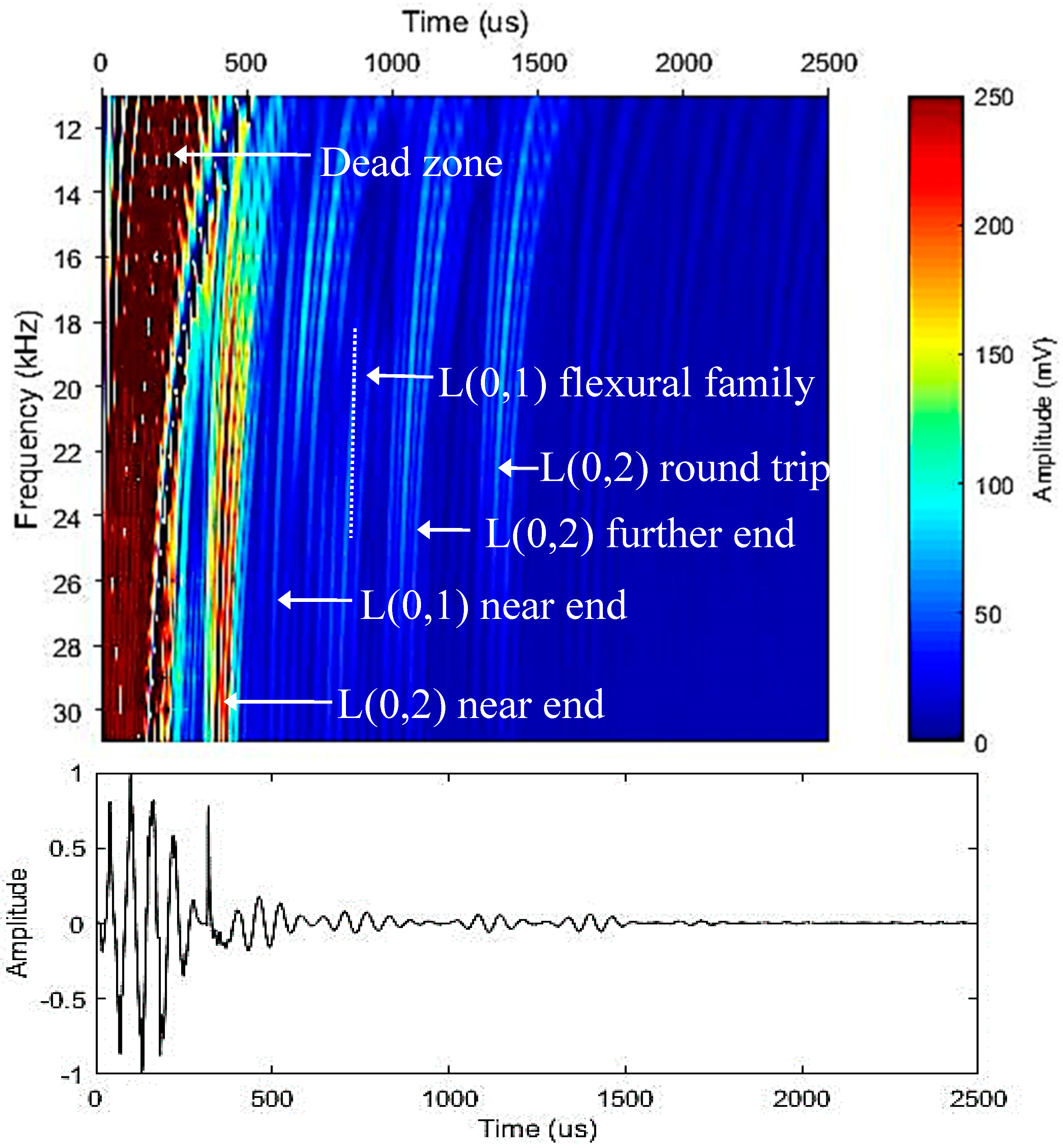
3.2. Experimental Results
4. Numerical Analysis
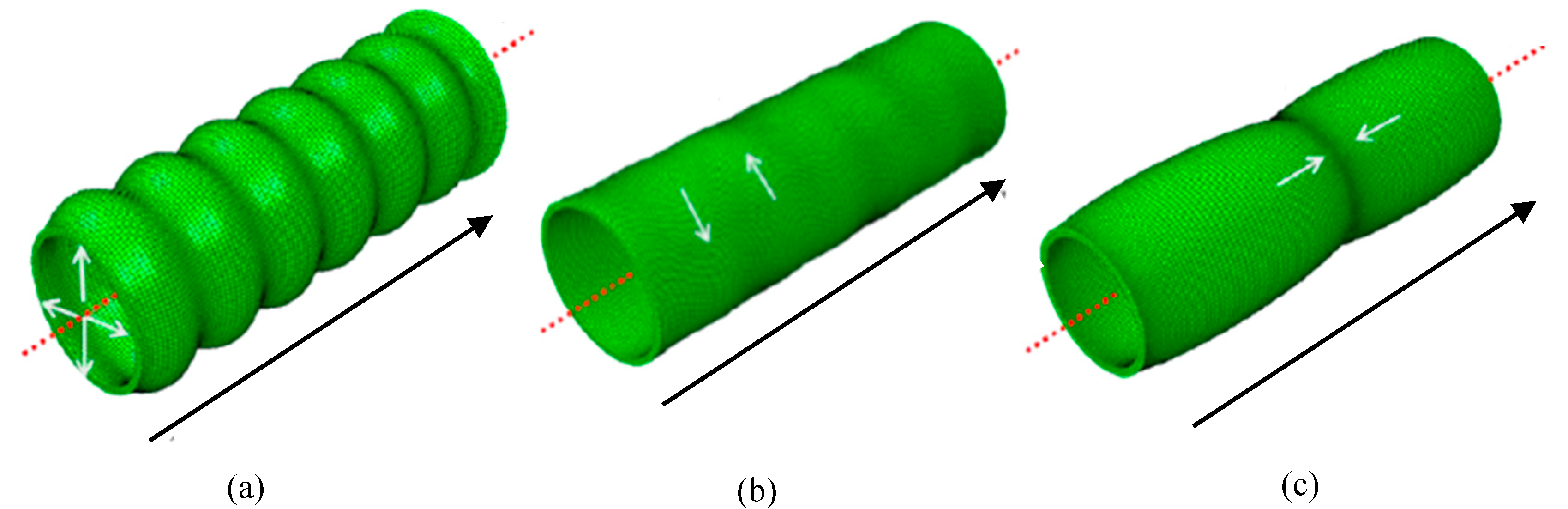
4.1. Finite Element Model
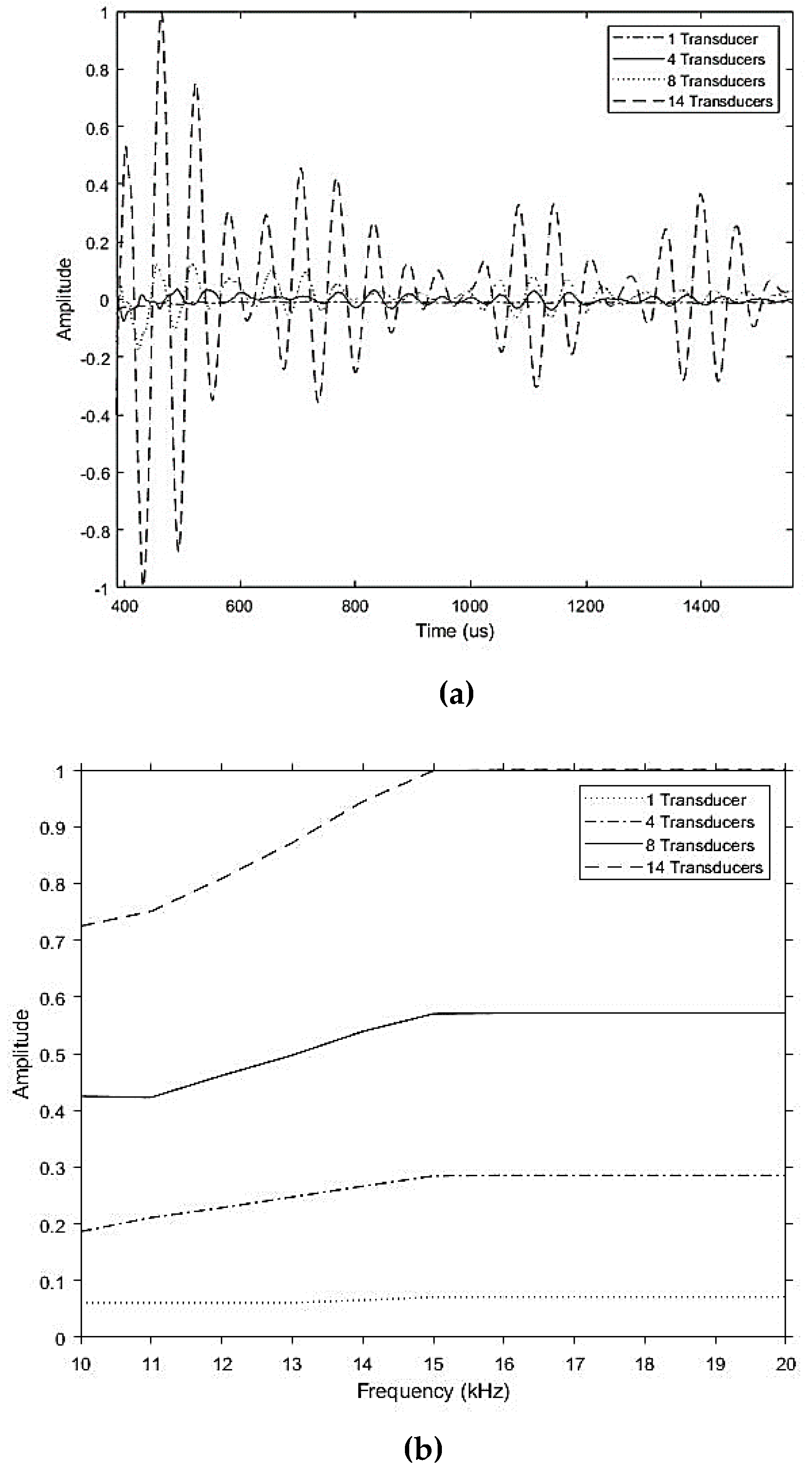
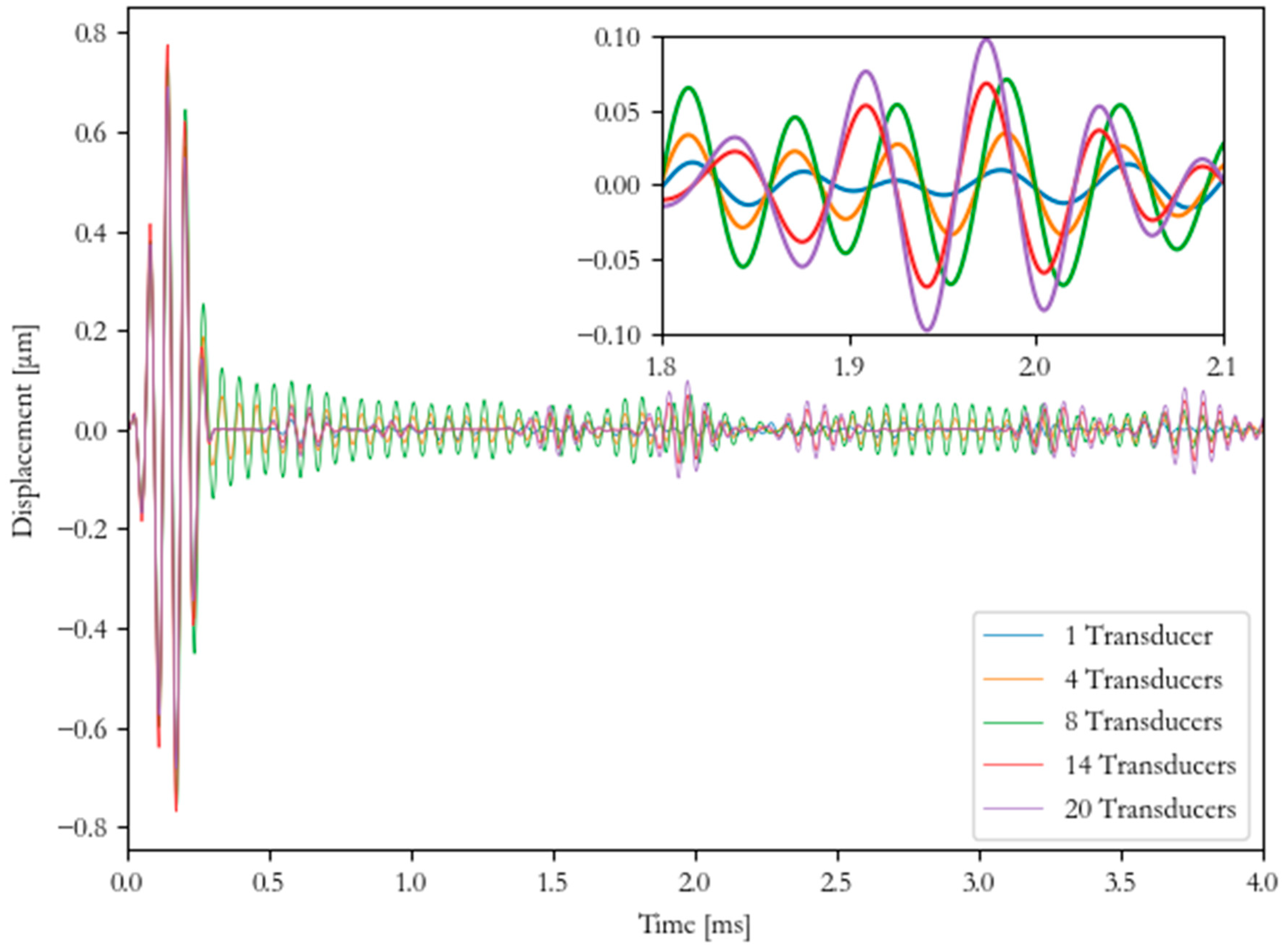
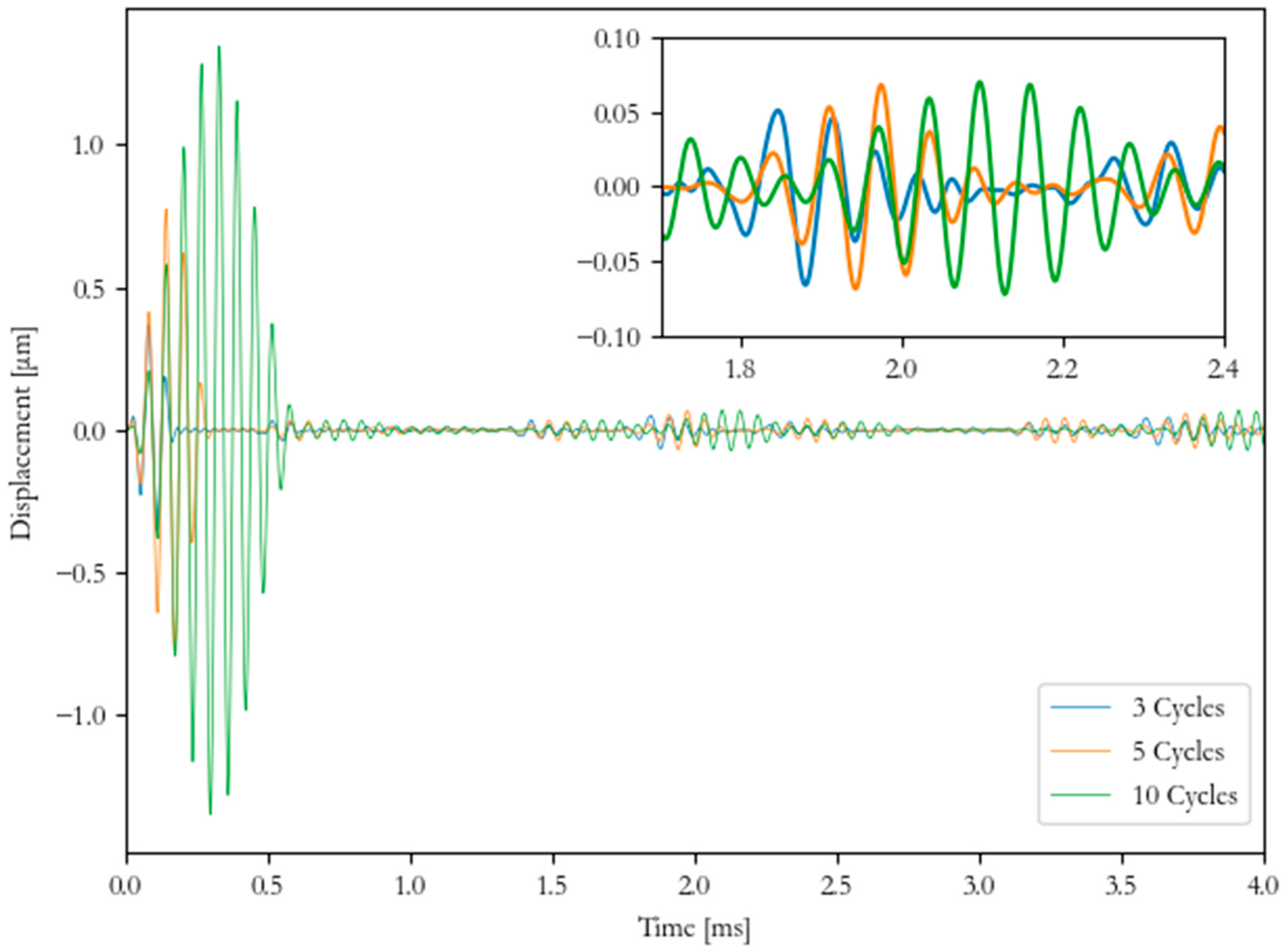
4.2. Parametric Study
5. Results and Discussion
6. Conclusions and Further Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ghazali, M.F.; Priyandoko, G.; Hamat, W.S.W.; Ching, T.W. Plastic pipe crack detection using ultrasonic guided wave method. In Proceedings of the Malaysian Technical Universities Conference on Engineering and Technology, Melaka, Malaysia, 10–11 November 2014. [Google Scholar]
- International Atomic Energy Agency (IAEA). Safety of Nuclear Power Plants: Design; IAEA Safety Standards Series No. SSR-2/1; IAEA: Austria, Vienna, 2012. [Google Scholar]
- Duvall, D.E.; Edwards, D.B. Forensic Analysis of Oxidation Embrittlement in Failed HDPE Potable Water Pipes. In Pipelines 2010; American Society of Civil Engineers (ASCE): Reston, VA, USA, 2010; pp. 648–662. [Google Scholar]
- Hunaidi, O.; Chu, W.; Wang, A.; Guan, W. Detecting leaks in plastic pipes. J. Am. Water Work. Assoc. 2000, 92, 82–94. [Google Scholar] [CrossRef]
- Hou, Q.; Jiao, W.; Ren, L.; Cao, H.; Song, G. Experimental study of leakage detection of natural gas pipeline using FBG based strain sensor and least square support vector machine. J. Loss Prev. Process. Ind. 2014, 32, 144–151. [Google Scholar] [CrossRef]
- Liu, Z.; Kleiner, Y. State of the art review of inspection technologies for condition assessment of water pipes. Measurement 2013, 46, 1–15. [Google Scholar] [CrossRef]
- International Atomic Energy Agency (IAEA). Ageing Management for Nuclear Power Plants; IAEA Safety Standards Series No. NS-G-2.12; IAEA: Austria, Vienna, 2009. [Google Scholar]
- Lowe, P.S.; Sanderson, R.M.; Boulgouris, N.V.; Haig, A.G.; Balachandran, W. Inspection of Cylindrical Structures Using the First Longitudinal Guided Wave Mode in Isolation for Higher Flaw Sensitivity. IEEE Sensors J. 2015, 16, 706–714. [Google Scholar] [CrossRef]
- Rose, J.L. Standing on the shoulders of giants: An example of guided wave inspection. Mater. Eval. 2002, 60, 53–59. [Google Scholar]
- Wilcox, P.D.; Lowe, M.J.S.; Cawley, P. Mode and Transducer Selection for Long Range Lamb Wave Inspection. J. Intell. Mater. Syst. Struct. 2001, 12, 553–565. [Google Scholar] [CrossRef]
- Kharrat, M.; Zhou, W.; Bareille, O.; Ichchou, M. Defect detection in pipes by torsional guided-waves: A tool of recognition and decision-making for the inspection of pipelines. In Proceedings of the 8th International Conference on Structural Dynamics, Leuven, Belgium, 4–6 July 2011. [Google Scholar]
- Lowe, P.S.; Scholehwar, T.; Yau, J.; Kanfoud, J.; Gan, T.-H.; Selcuk, C. Flexible Shear Mode Transducer for Structural Health Monitoring Using Ultrasonic Guided Waves. IEEE Trans. Ind. Inform. 2018, 14, 2984–2993. [Google Scholar] [CrossRef]
- Rose, J.L. Ultrasonic Guided Waves in Solid Media by Joseph L. Rose; Cambridge University Press (CUP): Cambridge, UK, 2014. [Google Scholar]
- Meitzler, A.H. Mode Coupling Occurring in the Propagation of Elastic Pulses in Wires. J. Acoust. Soc. Am. 1961, 33, 435. [Google Scholar] [CrossRef]
- Silk, M.; Bainton, K. The propagation in metal tubing of ultrasonic wave modes equivalent to Lamb waves. Ultrasonics 1979, 17, 11–19. [Google Scholar] [CrossRef]
- Bocchini, P.; Marzani, A.; Viola, E. Graphical User Interface for Guided Acoustic Waves. J. Comput. Civ. Eng. 2011, 25, 202–210. [Google Scholar] [CrossRef]
- Zhu, J.; Collins, R.P.; Boxall, J.; Mills, R.S.; Dwyer-Joyce, R. Non-Destructive In-Situ Condition Assessment of Plastic Pipe Using Ultrasound. Procedia Eng. 2015, 119, 148–157. [Google Scholar] [CrossRef]
- Hong, X.-B.; Lin, X.; Yang, B.; Li, M. Crack detection in plastic pipe using piezoelectric transducers based on nonlinear ultrasonic modulation. Smart Mater. Struct. 2017, 26, 104012. [Google Scholar] [CrossRef]
- Cheraghi, N.; Riley, M.; Taheri, F. A Novel Approach for Detection of Damage in Adhesivelybonded Joints in Plastic Pipes Based on Vibration Method Using Piezoelectric Sensors. In Proceedings of the 2005 IEEE International Conference on Systems, Man and Cybernetics, Waikoloa, HI, USA, 12 October 2005; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2006; Volume 4, pp. 3472–3478. [Google Scholar]
- Zhou, C.; Hong, M.; Su, Z.; Wang, Q.; Cheng, L. Evaluation of fatigue cracks using nonlinearities of acousto-ultrasonic waves acquired by an active sensor network. Smart Mater. Struct. 2012, 22, 15018. [Google Scholar] [CrossRef]
- Corp, S.M. Macro Fiber Composite. Available online: https://www.smart-material.com/MFC-product-main.html (accessed on 17 January 2020).
- Ren, G.; Yun, D.; Seo, H.; Song, M.; Jhang, K.-Y. Feasibility of MFC (Macro-Fiber Composite) Transducers for Guided Wave Technique. J. Korean Soc. Nondestruct. Test. 2013, 33, 264–269. [Google Scholar] [CrossRef]
- Na, W.-B.; Yoon, H.-S. Wave-attenuation estimation in fluid-filled steel pipes: The first longitudinal guided wave mode. Russ. J. Nondestruct. Test. 2007, 43, 549–554. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material Property | HDPE |
|---|---|
| Young’s Modulus | 1.1 GPa |
| Poisson’s Ratio | 0.45 |
| Density | 950 kg/m3 |
| Reflection (m) | Expected ToA (µs) | |
|---|---|---|
| L(0,1) | L(0,2) | |
| 0.5 | 803.57 | 444.05 |
| 1.34 | 2150.00 | 1190.05 |
| 1.84 | 2953.50 | 1634.10 |
| Frequency (kHz) | Number of Higher Order Modes | ||
|---|---|---|---|
| T(0,1) | L(0,1) | L(0,2) | |
| 10 | 4 | 7 | 2 |
| 12 | 5 | 8 | 2 |
| 14 | 6 | 9 | 3 |
| 16 | 7 | 10 | 3 |
| 18 | 8 | 11 | 4 |
| 20 | 9 | 12 | 5 |
| Number of Cycles | Frequency Bandwidth [kHz] | |
|---|---|---|
| Main Lobe | Side Lobe | |
| 3 | 5.33–26.67 | 0–32 |
| 5 | 9.6–22.4 | 6.4–25.6 |
| 10 | 12.8–19.2 | 11.2–20.8 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lowe, P.S.; Lais, H.; Paruchuri, V.; Gan, T.-H. Application of Ultrasonic Guided Waves for Inspection of High Density Polyethylene Pipe Systems. Sensors 2020, 20, 3184. https://doi.org/10.3390/s20113184
Lowe PS, Lais H, Paruchuri V, Gan T-H. Application of Ultrasonic Guided Waves for Inspection of High Density Polyethylene Pipe Systems. Sensors. 2020; 20(11):3184. https://doi.org/10.3390/s20113184
Chicago/Turabian StyleLowe, Premesh Shehan, Habiba Lais, Veena Paruchuri, and Tat-Hean Gan. 2020. "Application of Ultrasonic Guided Waves for Inspection of High Density Polyethylene Pipe Systems" Sensors 20, no. 11: 3184. https://doi.org/10.3390/s20113184
APA StyleLowe, P. S., Lais, H., Paruchuri, V., & Gan, T.-H. (2020). Application of Ultrasonic Guided Waves for Inspection of High Density Polyethylene Pipe Systems. Sensors, 20(11), 3184. https://doi.org/10.3390/s20113184