Optimization Complete Area Coverage by Reconfigurable hTrihex Tiling Robot

 , , and
, , and
Abstract
1. Introduction
2. The hTrihex Robot Description
3. Description of hTrihex Inside the Hexagon-based Grid Workspace
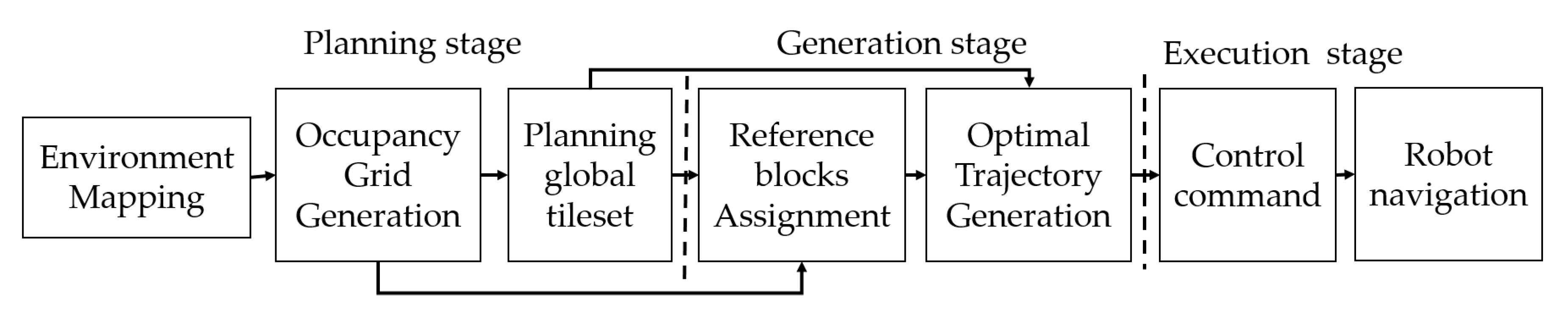
4. CACP Framework for hTrihex Platform
4.1. Coverage Path Planning Based on hTrihex
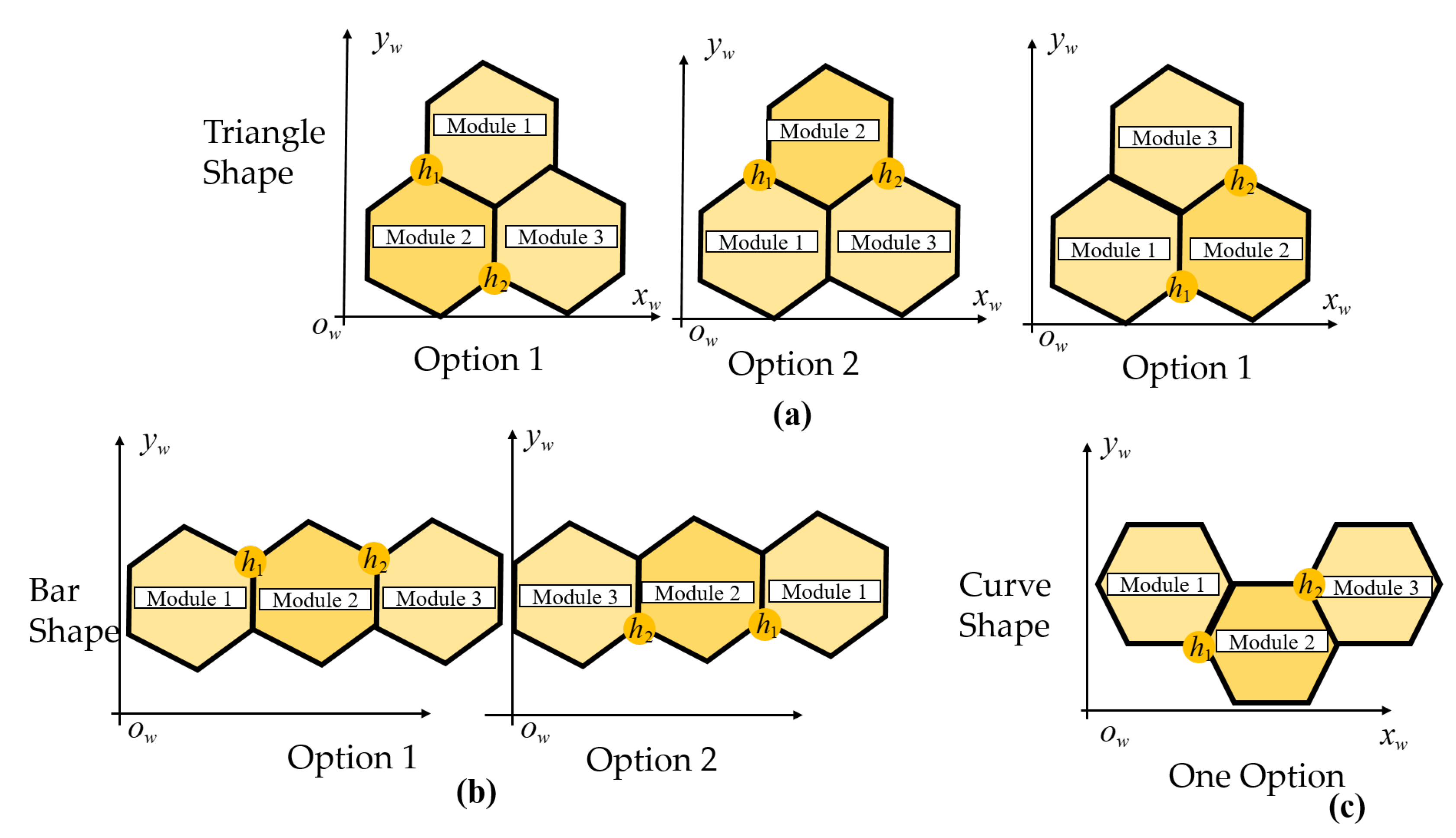
4.2. Assigning the hTrihex Module Location
| Algorithm 1 Module assignment for hTrihex |
|
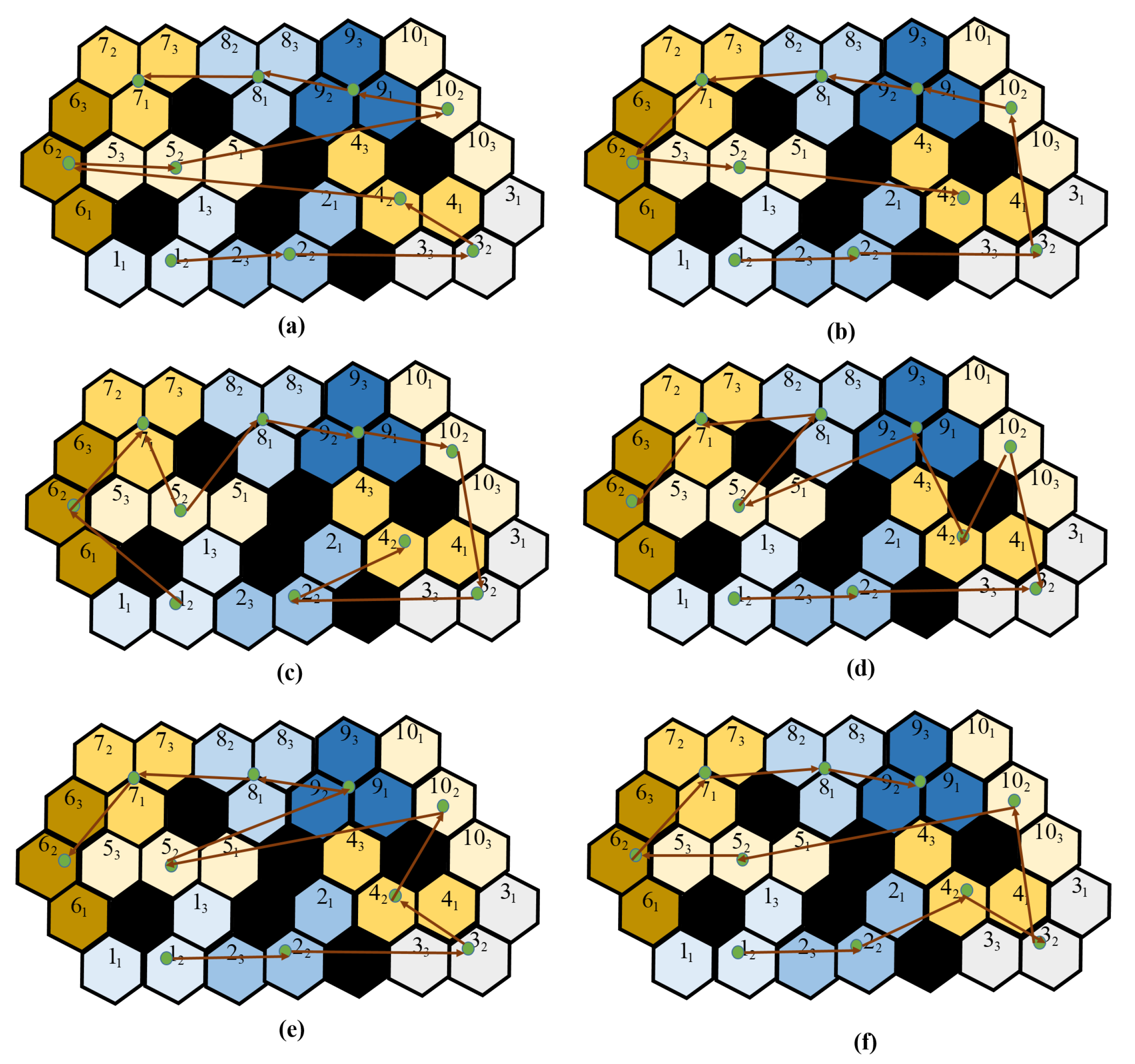
4.3. Optimal Planning for Navigation
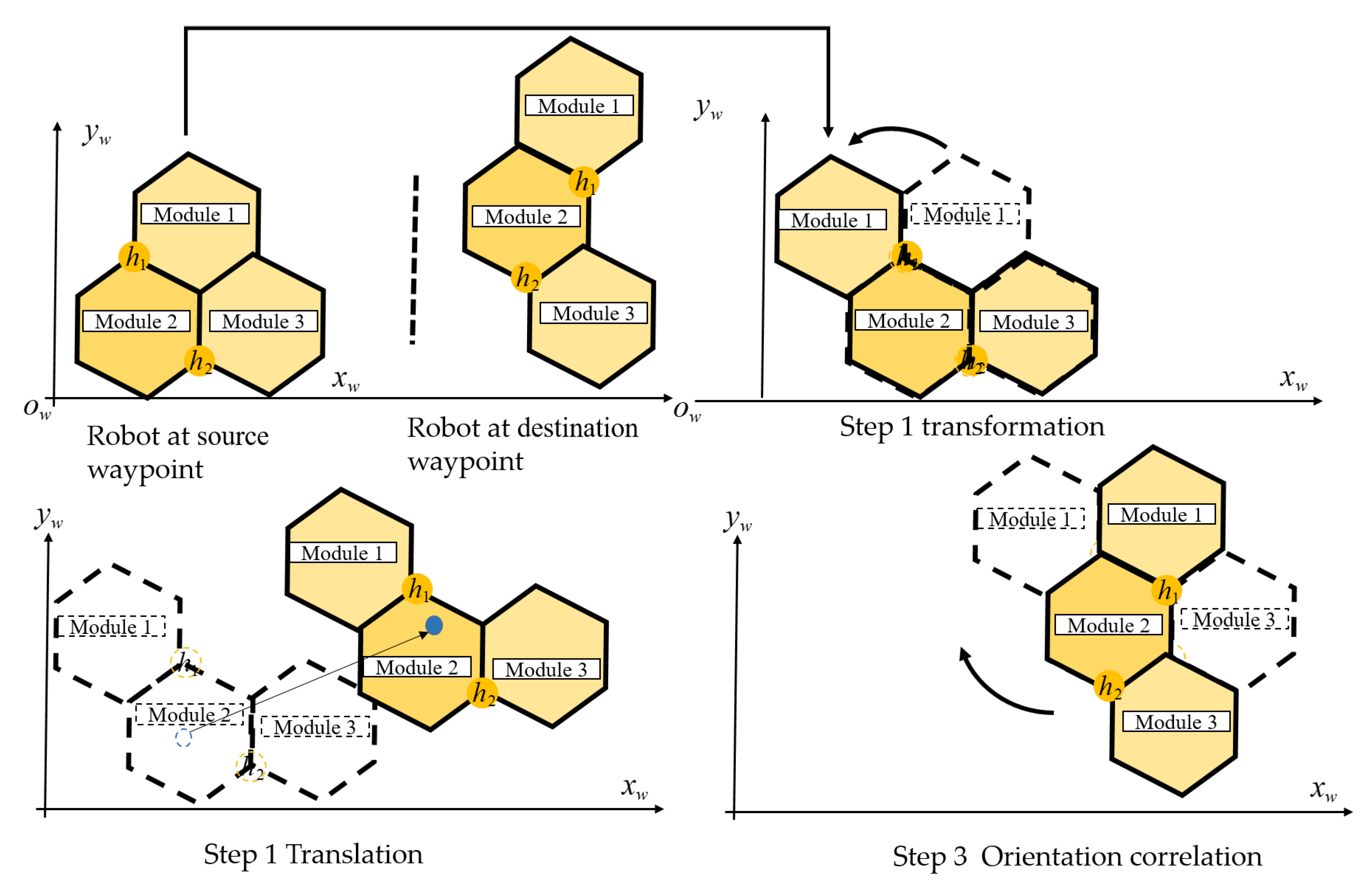
4.4. Execution Autonomous Area Coverage by hTrihex
5. Experimental Results
5.1. Simulation Environment
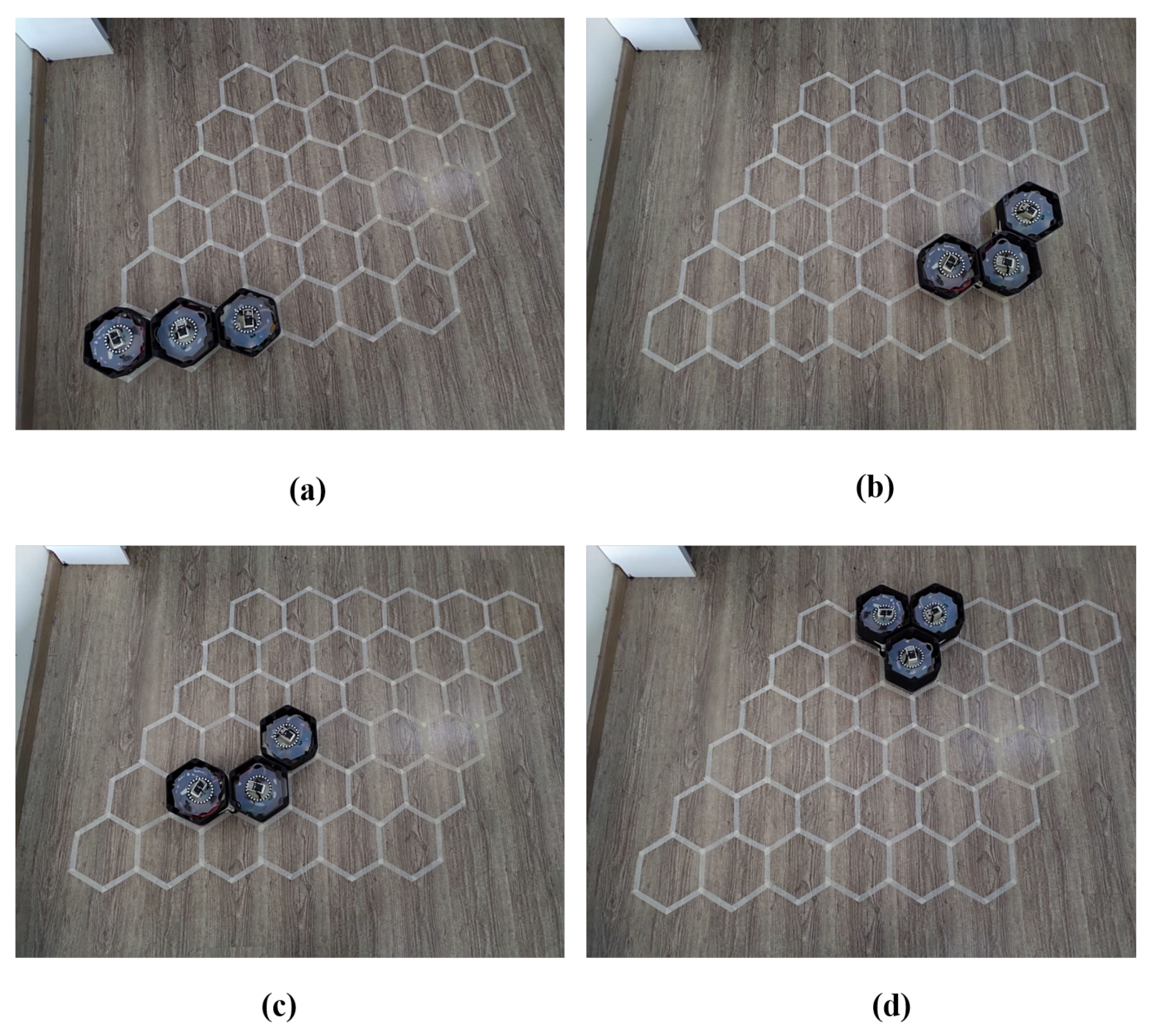
5.2. Real Environment Testbed
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Markets and Markets. Cleaning Robot Market by Product. 2015. Available online: http://www.marketsandmarkets.com/Market-Reports/cleaning-robot-market-22726569.html (accessed on 24 May 2020).
- Richter, F. Infographic: Let the Robot Do the Cleaning. Available online: https://www.statista.com/chart/9089/worldwide-personal-robot-sales-forecast (accessed on 24 May 2020).
- Joseph, L.J.; Newton, E.M.; David, M.N.; Paul, E.S. Autonomous Floor Cleaning Robot. U.S. Patent 7,448,113, 11 November 2008. [Google Scholar]
- Shi, Y.; Elara, M.R.; Le, A.V.; Prabakaran, V.; Wood, K.L. Path tracking control of self-reconfigurable robot hTetro with four differential drive units. IEEE Robot. Autom. Lett. 2020, 5, 3998–4005. [Google Scholar] [CrossRef]
- Edwards, T.; SÖRME, J. A Comparison of Path Planning Algorithms for Robotic Vacuum Cleaners. Ph.D. Thesis, KTH Royal Institute OF Technology, Stockholm, Sweden, June 2018. [Google Scholar]
- Gao, X.; Li, K.; Wang, Y.; Men, G.; Zhou, D.; Kikuchi, K. A floor cleaning robot using Swedish wheels. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, Sanya, China, 15–18 December 2007; pp. 2069–2073. [Google Scholar]
- Lakshmanan, A.K.; Mohan, R.E.; Ramalingam, B.; Le, A.V.; Veerajagadeshwar, P.; Tiwari, K.; Ilyas, M. Complete coverage path planning using reinforcement learning for tetromino based cleaning and maintenance robot. Autom. Constr. 2020, 112, 103078. [Google Scholar] [CrossRef]
- Lumelsky, V.J.; Mukhopadhyay, S.; Sun, K. Dynamic path planning in sensor-based terrain acquisition. IEEE Trans. Robot. Autom. 1990, 6, 462–472. [Google Scholar] [CrossRef]
- Acar, E.U.; Choset, H.; Rizzi, A.A.; Atkar, P.N.; Hull, D. Morse Decompositions for Coverage Tasks. Int. J. Robot. Res. 2002, 21, 331–344. [Google Scholar] [CrossRef]
- Wang, L.; Gao, H.; Cai, Z. Topological Mapping and Navigation for Mobile Robots with Landmark Evaluation. In Proceedings of the 2009 International Conference on Information Engineering and Computer Science, Wuhan, China, 19–20 December 2009; pp. 1–5. [Google Scholar] [CrossRef]
- Jin, J.; Tang, L. Coverage path planning on three-dimensional terrain for arable farming. J. Field Robot. 2011, 28, 424–440. [Google Scholar] [CrossRef]
- Cheng, P.; Keller, J.; Kumar, V. Time-optimal UAV trajectory planning for 3D urban structure coverage. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 2750–2757. [Google Scholar]
- Luo, C.; Yang, S.X. A real-time cooperative sweeping strategy for multiple cleaning robots. In Proceedings of the IEEE Internatinal Symposium on Intelligent Control, Vancouver, BC, Canada, 30 October 2002; pp. 660–665. [Google Scholar]
- Zelinsky, A.; Jarvis, R.A.; Byrne, J.; Yuta, S. Planning paths of complete coverage of an unstructured environment by a mobile robot. In Proceedings of the International Conference on Advanced Robotics, Tsukuba, Japan, 8–9 November 1993; Volume 13, pp. 533–538. [Google Scholar]
- Le, A.V.; Hayat, A.A.; Elara, M.R.; Nhan, N.H.K.; Prathap, K. Reconfigurable Pavement Sweeping Robot and Pedestrian Cohabitant Framework by Vision Techniques. IEEE Access 2019, 7, 159402–159414. [Google Scholar] [CrossRef]
- Veerajagadheswar, P.; Ku, P.C.; Elara, M.R.; Le, A.V.; Iwase, M. Motion planner for a Tetris-inspired reconfigurable floor cleaning robot. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420914441. [Google Scholar] [CrossRef]
- Choset, H. Coverage for robotics—A survey of recent results. Ann. Math. Artif. Intell. 2001, 31, 113–126. [Google Scholar] [CrossRef]
- Cheng, K.P.; Mohan, R.E.; Nhan, N.H.K.; Le, A.V. Graph theory-based approach to accomplish complete coverage path planning tasks for reconfigurable robots. IEEE Access 2019, 7, 94642–94657. [Google Scholar] [CrossRef]
- Manimuthu, A.; Le, A.V.; Mohan, R.E.; Veerajagadeshwar, P.; Nguyen, H.K.N.; Ku, P.C. Energy Consumption Estimation Model for Complete Coverage of a Tetromino Inspired Reconfigurable Surface Tiling Robot. Energies 2019, 12, 2257. [Google Scholar] [CrossRef]
- Le, A.; Prabakaran, V.; Sivanantham, V.; Mohan, R. Modified a-star algorithm for efficient coverage path planning in tetris inspired self-reconfigurable robot with integrated laser sensor. Sensors 2018, 18, 2585. [Google Scholar] [CrossRef] [PubMed]
- Parween, R.; Le, A.V.; Shi, Y.; Elara, M.R. System Level Modeling and Control Design of hTetrakis–A Polyiamond Inspired Self-Reconfigurable Floor Tiling Robot. IEEE Access 2019, 8, 88177–88187. [Google Scholar] [CrossRef]
- Guan, E.; Fu, Z.; Yan, W.; Jiang, D.; Zhao, Y. Self-reconfiguration path planning design for M-lattice robot based on genetic algorithm. In Proceedings of the International Conference on Intelligent Robotics and Applications, Aachen, Germany, 6–8 December 2011; pp. 505–514. [Google Scholar]
- Karaman, S.; Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int. J. Robot. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef]
- Pfotzer, L.; Staehler, M.; Hermann, A.; Rönnau, A.; Dillmann, R. KAIRO 3: Moving over stairs unknown obstacles with reconfigurable snake-like robots. In Proceedings of the 2015 European Conference on Mobile Robots (ECMR), Lincoln, UK, 2–4 September 2015; pp. 1–6. [Google Scholar]
- Le, A.V.; Ku, P.C.; Tun, T.T.; Nhan, N.H.K.; Shi, Y.Y.; Mohan, R.E. Realization energy optimization of complete path planning in differential drive based self-reconfigurable floor cleaning robot. Energies 2019, 12, 1136. [Google Scholar] [CrossRef]
- Hauser, S.; Mutlu, M.; Léziart, P.A.; Khodr, H.; Bernardino, A.; Ijspeert, A. Roombots extended: Challenges in the next generation of self-reconfigurable modular robots and their application in adaptive and assistive furniture. Robot. Auton. Syst. 2020, 127, 103467. [Google Scholar] [CrossRef]
- Arkin, E.M.; Fekete, S.P.; Mitchell, J.S. Approximation algorithms for lawn mowing and milling. Comput. Geom. 2000, 17, 25–50. [Google Scholar] [CrossRef]
- Geng, X.; Chen, Z.; Yang, W.; Shi, D.; Zhao, K. Solving the traveling salesman problem based on an adaptive simulated annealing algorithm with greedy search. Appl. Soft Comput. 2011, 11, 3680–3689. [Google Scholar] [CrossRef]
- Le, A.V.; Nhan, N.H.K.; Mohan, R.E. Evolutionary Algorithm-Based Complete Coverage Path Planning for Tetriamond Tiling Robots. Sensors 1999, 20, 445. [Google Scholar] [CrossRef] [PubMed]
- Dorigo, M.; Di Caro, G. Ant colony optimization: A new meta-heuristic. In Proceedings of the 1999 Congress on Evolutionary Computation-CEC99 (Cat. No. 99TH8406), Washington, DC, USA, 6–9 July 1999; Volume 2, pp. 1470–1477. [Google Scholar]
- Thomas, B. Evolutionary Algorithms in Theory and Practice: Evolution Strategies, Evolutionary Programming, Genetic Algorithms; Oxford University Press: New York, NY, USA, 1996. [Google Scholar]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 29 June 2009; p. 5. [Google Scholar]
- Veerajagadheswar, P.; Elara, M.R.; Pathmakumar, T.; Ayyalusami, V. A tiling-theoretic approach to efficient area coverage in a tetris-inspired floor cleaning robot. IEEE Access 2018, 6, 35260–35271. [Google Scholar] [CrossRef]
- A Polyomino Tiling Algorithm. Available online: https://gfredericks.com/gfrlog/99 (accessed on 24 May 2020).
- González, J.; Blanco, J.L.; Galindo, C.; Ortiz-de-Galisteo, A.; Fernández-Madrigal, J.A.; Moreno, F.A.; Martinez, J.L. Mobile robot localization based on ultra-wide-band ranging: A particle filter approach. Robot. Auton. Syst. 2009, 57, 496–507. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Triangle Shape | Bar Shape | Curve Shape | ||
|---|---|---|---|---|
| Triangle Shape | 0 0 0 | 0 | 0 0 | |
| Bar Shape | 0 | 0 0 0 | 0 0 | |
| Curve shape | 0 0 | 0 0 | 0 0 0 | |
| Triangle Shape | Bar Shape | Curve Shape | ||
|---|---|---|---|---|
| Triangle Shape | 0 0 0 | 0 | 0 0 | |
| Bar Shape | 0 | 0 0 0 | 0 0 | |
| Curve shape | 0 0 | 0 0 | 0 0 0 | |
| Approach | 2D | Total Cost | Running |
|---|---|---|---|
| Distance (m) | Weight (Nm) | Time (Second) | |
| Zigzag | 10.93 | 93.33 | 0.01 |
| Spiral | 10.99 | 94.37 | 0.05 |
| Random search | 10.33 | 84.1 | 31.34 |
| Greedy search | 10.42 | 81.36 | 35.25 |
| Propped method GA | 10.12 | 61.99 | 1.25 |
| Proposed method ACO | 10.23 | 61.35 | 1.22 |
| Method | Costweight | Summation | Translation | Transformation | Orientation | Travel |
|---|---|---|---|---|---|---|
| - | (Nm) | Energy (J) | Energy (J) | Energy (J) | Energy (J) | Time (Second) |
| Zigzag | 103.19 | 20.41 | 9.19 | 6.52 | 4.70 | 251 |
| Spiral | 104.45 | 19.82 | 9.32 | 6.71 | 3.79 | 227 |
| Random search | 94.28 | 18.44 | 8.69 | 5.86 | 3.89 | 202 |
| Greedy search | 91.52 | 17.56 | 8.52 | 5.13 | 3.91 | 204 |
| GA | 69.83 | 12.59 | 7.21 | 3.21 | 2.17 | 198 |
| ACO | 68.97 | 12.33 | 7.46 | 2.96 | 1.91 | 193 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Le, A.V.; Parween, R.; Elara Mohan, R.; Nhan, N.H.K.; Enjikalayil Abdulkader, R. Optimization Complete Area Coverage by Reconfigurable hTrihex Tiling Robot. Sensors 2020, 20, 3170. https://doi.org/10.3390/s20113170
Le AV, Parween R, Elara Mohan R, Nhan NHK, Enjikalayil Abdulkader R. Optimization Complete Area Coverage by Reconfigurable hTrihex Tiling Robot. Sensors. 2020; 20(11):3170. https://doi.org/10.3390/s20113170
Chicago/Turabian StyleLe, Anh Vu, Rizuwana Parween, Rajesh Elara Mohan, Nguyen Huu Khanh Nhan, and Raihan Enjikalayil Abdulkader. 2020. "Optimization Complete Area Coverage by Reconfigurable hTrihex Tiling Robot" Sensors 20, no. 11: 3170. https://doi.org/10.3390/s20113170
APA StyleLe, A. V., Parween, R., Elara Mohan, R., Nhan, N. H. K., & Enjikalayil Abdulkader, R. (2020). Optimization Complete Area Coverage by Reconfigurable hTrihex Tiling Robot. Sensors, 20(11), 3170. https://doi.org/10.3390/s20113170