Terminal Sliding Mode Control with a Novel Reaching Law and Sliding Mode Disturbance Observer for Inertial Stabilization Imaging Sensor



Abstract
1. Introduction
2. Mathematical Model of ISIS
3. Composite Controller Design
3.1. Terminal Sliding Mode Controller Design Based on Novel Exponential Reaching Law
3.2. High-Order Terminal Sliding Mode Observer Design
4. Simulations
4.1. Analysis of the Disturbances
4.1.1. Mass Unbalance Torque
4.1.2. Friction Torque
4.2. Case I—Sinusoidal Signal Tracking
4.3. Case II—Step Signal Tracking with Disturbance
4.4. Case III—Stabilization with Disturbance
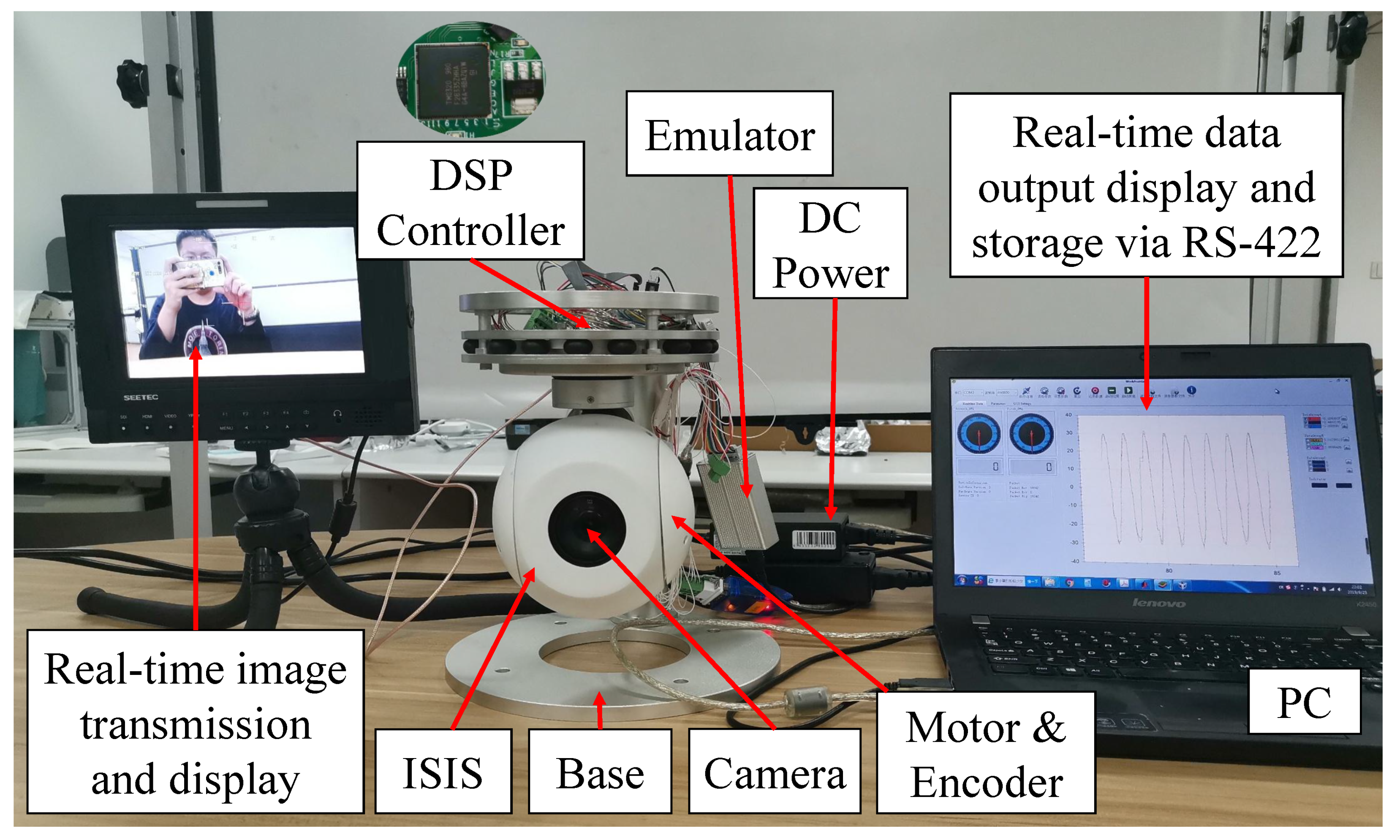
5. Experiments
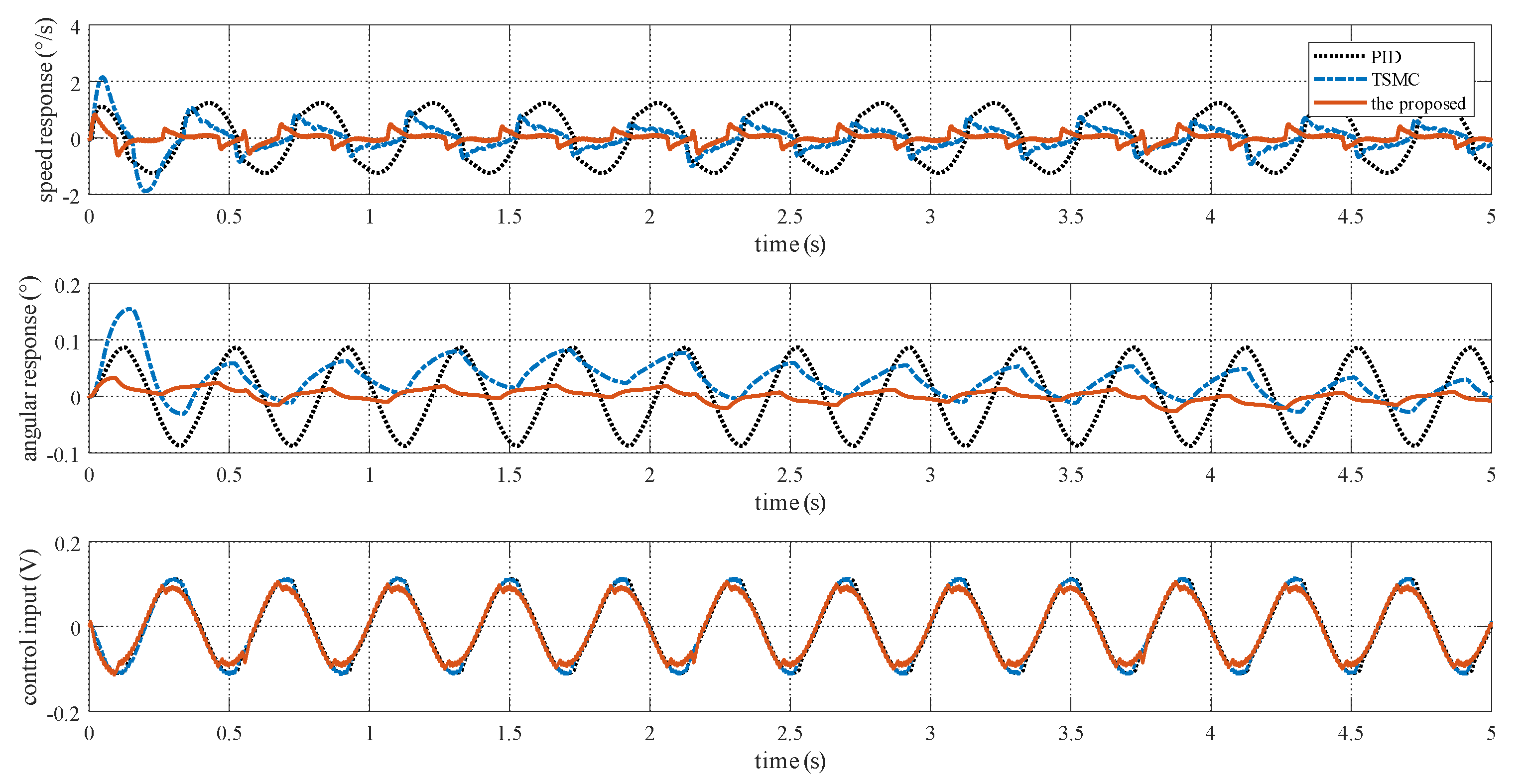
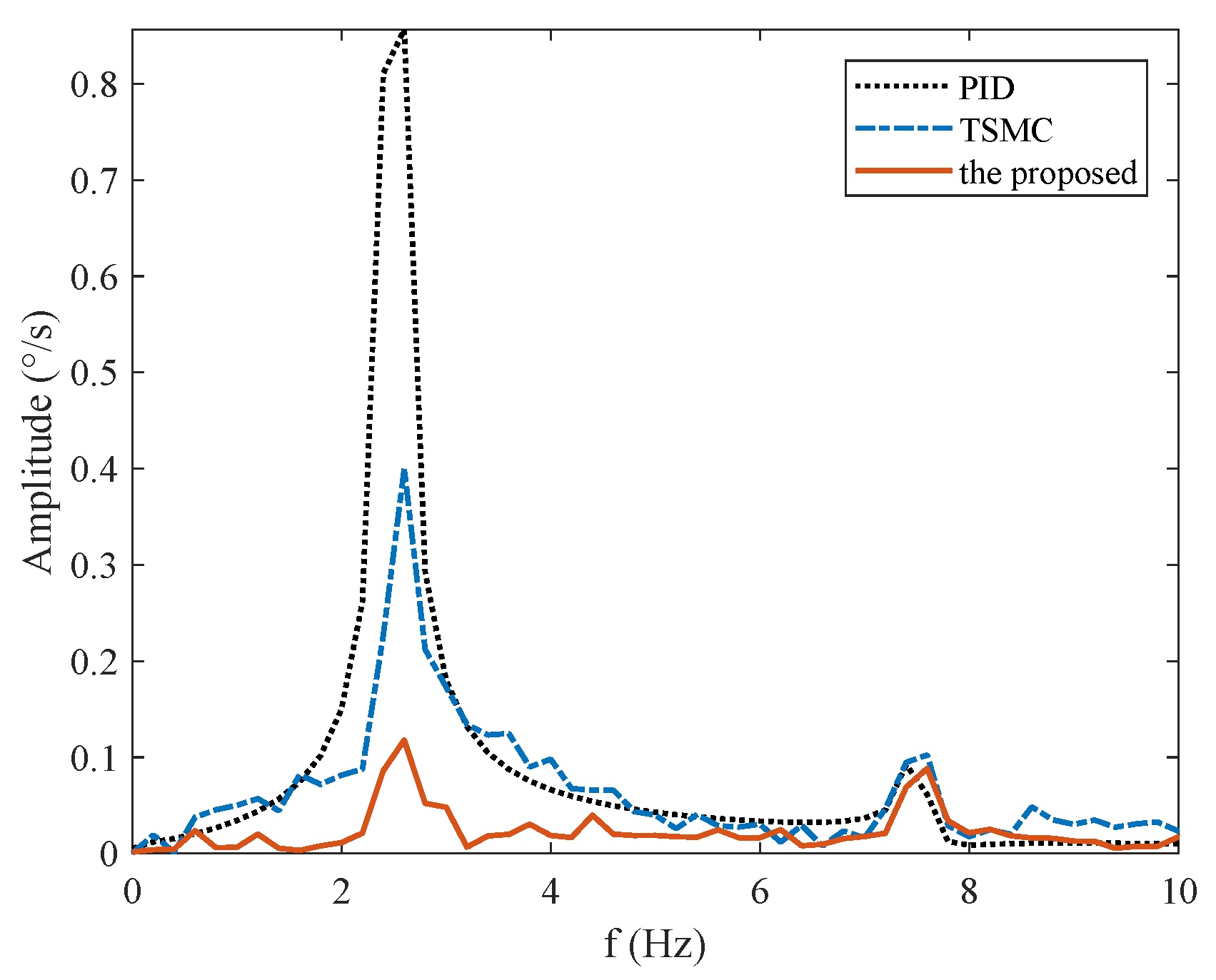
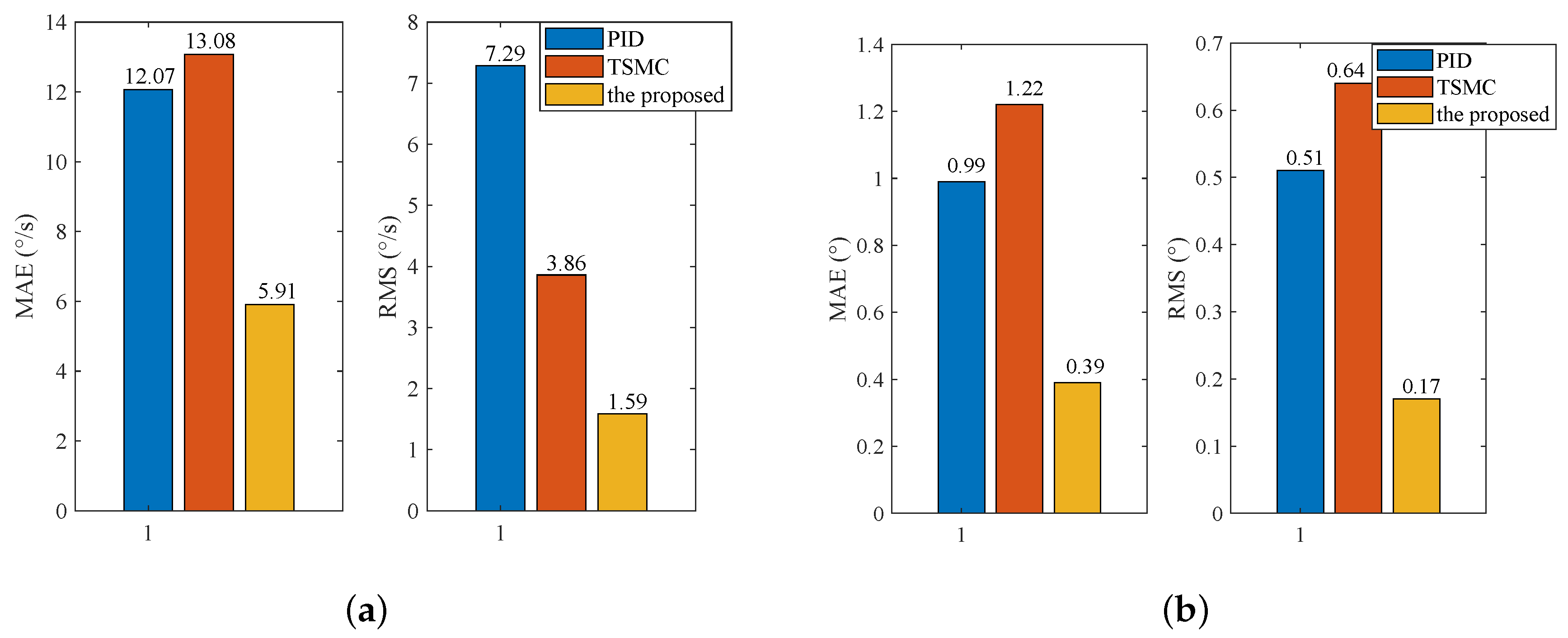
5.1. Case I—Sinusoidal Signal Tracking
5.2. Case II—Step Signal Tracking with Disturbance
5.3. Case III—Stabilization with Disturbance
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Mao, J.; Yang, J.; Liu, X.; Li, S.; Li, Q. Modeling and robust continuous TSM control for an inertially stabilized platform with couplings. IEEE Trans. Control Syst. Technol. 2019, 1–8. [Google Scholar] [CrossRef]
- Zhou, Z.; Zhang, B.; Mao, D. MIMO Fuzzy Sliding Mode Control for Three-Axis Inertially Stabilized Platform. Sensors 2019, 19, 1658. [Google Scholar] [CrossRef] [PubMed]
- Masten, M.K. Inertially stabilized platforms for optical imaging systems. IEEE Control Syst. Mag. 2008, 28, 47–64. [Google Scholar]
- Rezac, M.; Hurak, Z. Vibration rejection for inertially stabilized double gimbal platform using acceleration feedforward. In Proceedings of the 2011 IEEE International Conference on Control Applications (CCA), Denver, CO, USA, 28–30 September 2011; pp. 363–368. [Google Scholar]
- Safa, A.; Abdolmalaki, R.Y. Robust output feedback tracking control for inertially stabilized platforms with matched and unmatched uncertainties. IEEE Trans. Control Syst. Technol. 2019, 27, 118–131. [Google Scholar] [CrossRef]
- Wang, Y.; Tian, D.; Dai, M.; Shen, H.; Jia, P. Modeling and simulation of wire-wound friction of compact inertially stabilized platforms. In Proceedings of the 2018 IEEE International Conference on Mechatronics and Automation (ICMA), Changchun, China, 5–8 August 2018; pp. 1949–1954. [Google Scholar]
- Rezac, M.; Hurak, Z. Structured MIMO ∞ design for dual-stage inertial stabilization: Case study for HIFOO and Hinfstruct solvers. Mechatronics 2013, 23, 1084–1093. [Google Scholar] [CrossRef]
- Wang, F.; Wang, R.; Liu, E.; Zhang, W. Stabilization control mothed for two-axis inertially stabilized platform based on active disturbance rejection control with noise reduction disturbance observer. IEEE Access 2019, 7, 99521–99529. [Google Scholar] [CrossRef]
- Deng, K.; Cong, S.; Kong, D.; Shen, H. Discrete-time direct model reference adaptive control application in a high-precision inertially stabilized platform. IEEE Trans. Ind. Electron. 2019, 66, 358–367. [Google Scholar] [CrossRef]
- Dong, F.; Lei, X.; Chou, W. A dynamic model and control method for a two-axis inertially stabilized platform. IEEE Trans. Ind. Electron. 2017, 64, 432–439. [Google Scholar] [CrossRef]
- Mao, J.; Li, S.; Li, Q.; Yang, J. Design and implementation of continuous finite-time sliding mode control for 2-DOF inertially stabilized platform subject to multiple disturbances. ISA Trans. 2019, 84, 214–224. [Google Scholar] [CrossRef]
- Zou, Y.; Lei, X. A compound control method based on the adaptive neural network and sliding mode control for inertial stable platform. Neurocomputing 2015, 155, 286–294. [Google Scholar] [CrossRef]
- Daafouz, J.; Bernussou, J.; Geromel, J.C. On Inexact LPV Control Design of Continuous–Time Polytopic Systems. IEEE Trans. Autom. Control. 2008, 53, 1674–1678. [Google Scholar] [CrossRef]
- Marcio, J.L.; Eduardo, S.T.; Ricardo, C.L.F.O.; Pedro, L.D.P. A new approach to handle additive and multiplicative uncertainties in the measurement for LPV filtering. Int. J. Syst. Sci. 2016, 47, 1042–1053. [Google Scholar]
- Sabanovic, A. Variable structure systems with sliding modes in motion control-a survey. IEEE Trans. Ind. Inform. 2011, 7, 212–223. [Google Scholar] [CrossRef]
- Man, Z.; Yu, X.H. Terminal sliding mode control of MIMO linear systems. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1997, 44, 1065–1070. [Google Scholar]
- Feng, Y.; Yu, X.; Man, Z. Non-singular terminal sliding mode control of rigid manipulators. Automatica 2002, 38, 2159–2167. [Google Scholar] [CrossRef]
- Zhang, X.; Sun, L.; Zhao, K.; Sun, L. Nonlinear speed control for PMSM system using sliding-mode control and disturbance compensation techniques. IEEE Trans. Power Electron. 2013, 28, 1358–1365. [Google Scholar] [CrossRef]
- Fallaha, C.J.; Saad, M.; Kanaan, H.Y.; Al-Haddad, K. Sliding-mode robot control with exponential reaching law. IEEE Trans. Ind. Electron. 2011, 58, 600–610. [Google Scholar] [CrossRef]
- Xu, B.; Shen, X.; Ji, W.; Shi, G.; Xu, J.; Ding, S. Adaptive nonsingular terminal sliding model control for permanent magnet synchronous motor based on disturbance observer. IEEE Access 2018, 6, 48913–48920. [Google Scholar] [CrossRef]
- Wang, Y.; Feng, Y.; Zhang, X.; Liang, J.; Cheng, X. New reaching law control for permanent magnet synchronous motor with extended disturbance observer. IEEE Access 2019, 7, 186296–186307. [Google Scholar] [CrossRef]
- Wang, Y.; Tian, D.; Dai, M. Composite hierarchical anti-disturbance control with multisensor fusion for compact optoelectronic platforms. Sensors 2018, 18, 3190. [Google Scholar] [CrossRef]
- Deng, Y.; Wang, J.; Li, H.; Liu, J.; Tian, D. Adaptive sliding mode current control with sliding mode disturbance observer for PMSM drives. ISA Trans. 2019, 88, 113–126. [Google Scholar] [CrossRef] [PubMed]
- Zheng, J.; Wang, H.; Man, Z.; Jin, J.; Fu, M. Robust motion control of a linear motor positioner using fast nonsingular terminal sliding mode. IEEE/ASME Trans. Mechatron. 2015, 20, 1743–1752. [Google Scholar] [CrossRef]
- Li, S.; Zhong, M. High-precision disturbance compensation for a three-axis gyro-stabilized camera mount. IEEE/ASME Trans. Mechatron. 2015, 20, 3135–3147. [Google Scholar] [CrossRef]
- Ding, Z.; Zhao, F.; Lang, Y.; Jiang, Z.; Zhu, J. Anti- disturbance neural-sliding mode control for inertially stabilized platform with actuator saturation. IEEE Access 2019, 7, 92220–92231. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Description | Value |
|---|---|---|
| J | Moment of inertia | 0.000265 kg·m2 |
| B | Frictional coefficient | 0.00530 N·m·s |
| Nominal value of J | 1.1 J | |
| Nominal value of B | 1.1 B | |
| m | Mass | 1.5 kg |
| r | Centroid offset distance | 5 mm |
| Horizontal acceleration | 0.1 g | |
| Vertical acceleration | 0.1 g | |
| Coulomb friction torque | 0.001 N·m | |
| Maximum static friction coefficient | 0.01 N·m | |
| Viscous friction coefficient | 0.0005 N·m/ °/s | |
| Stribeck velocity | 2 °/s |
| Controller | Parameters |
|---|---|
| TSMC | |
| the proposed |
| Controller | Parameters |
|---|---|
| TSMC | |
| the proposed |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Che, X.; Tian, D.; Jia, P.; Gao, Y.; Ren, Y. Terminal Sliding Mode Control with a Novel Reaching Law and Sliding Mode Disturbance Observer for Inertial Stabilization Imaging Sensor. Sensors 2020, 20, 3107. https://doi.org/10.3390/s20113107
Che X, Tian D, Jia P, Gao Y, Ren Y. Terminal Sliding Mode Control with a Novel Reaching Law and Sliding Mode Disturbance Observer for Inertial Stabilization Imaging Sensor. Sensors. 2020; 20(11):3107. https://doi.org/10.3390/s20113107
Chicago/Turabian StyleChe, Xin, Dapeng Tian, Ping Jia, Yang Gao, and Yan Ren. 2020. "Terminal Sliding Mode Control with a Novel Reaching Law and Sliding Mode Disturbance Observer for Inertial Stabilization Imaging Sensor" Sensors 20, no. 11: 3107. https://doi.org/10.3390/s20113107
APA StyleChe, X., Tian, D., Jia, P., Gao, Y., & Ren, Y. (2020). Terminal Sliding Mode Control with a Novel Reaching Law and Sliding Mode Disturbance Observer for Inertial Stabilization Imaging Sensor. Sensors, 20(11), 3107. https://doi.org/10.3390/s20113107