Data-Driven Structural Health Monitoring and Damage Detection through Deep Learning: State-of-the-Art Review



Abstract
1. Introduction
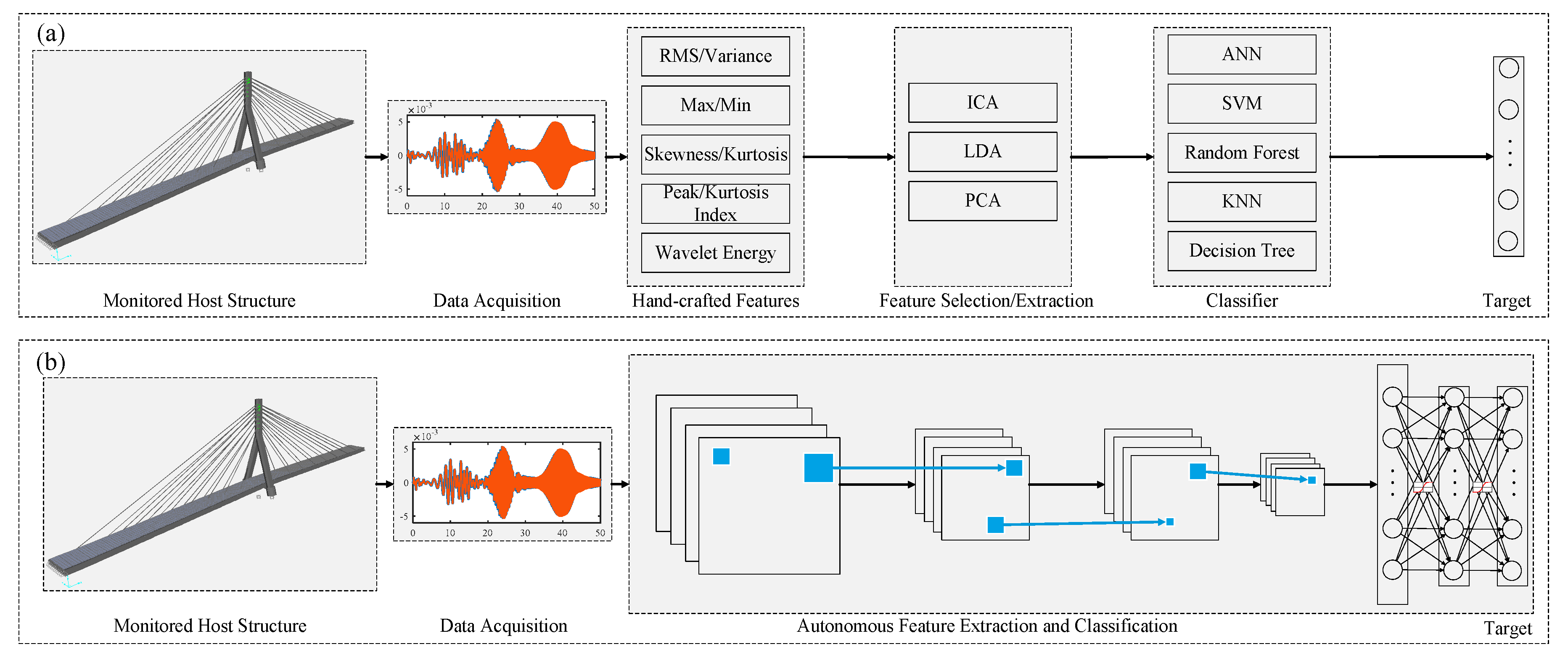
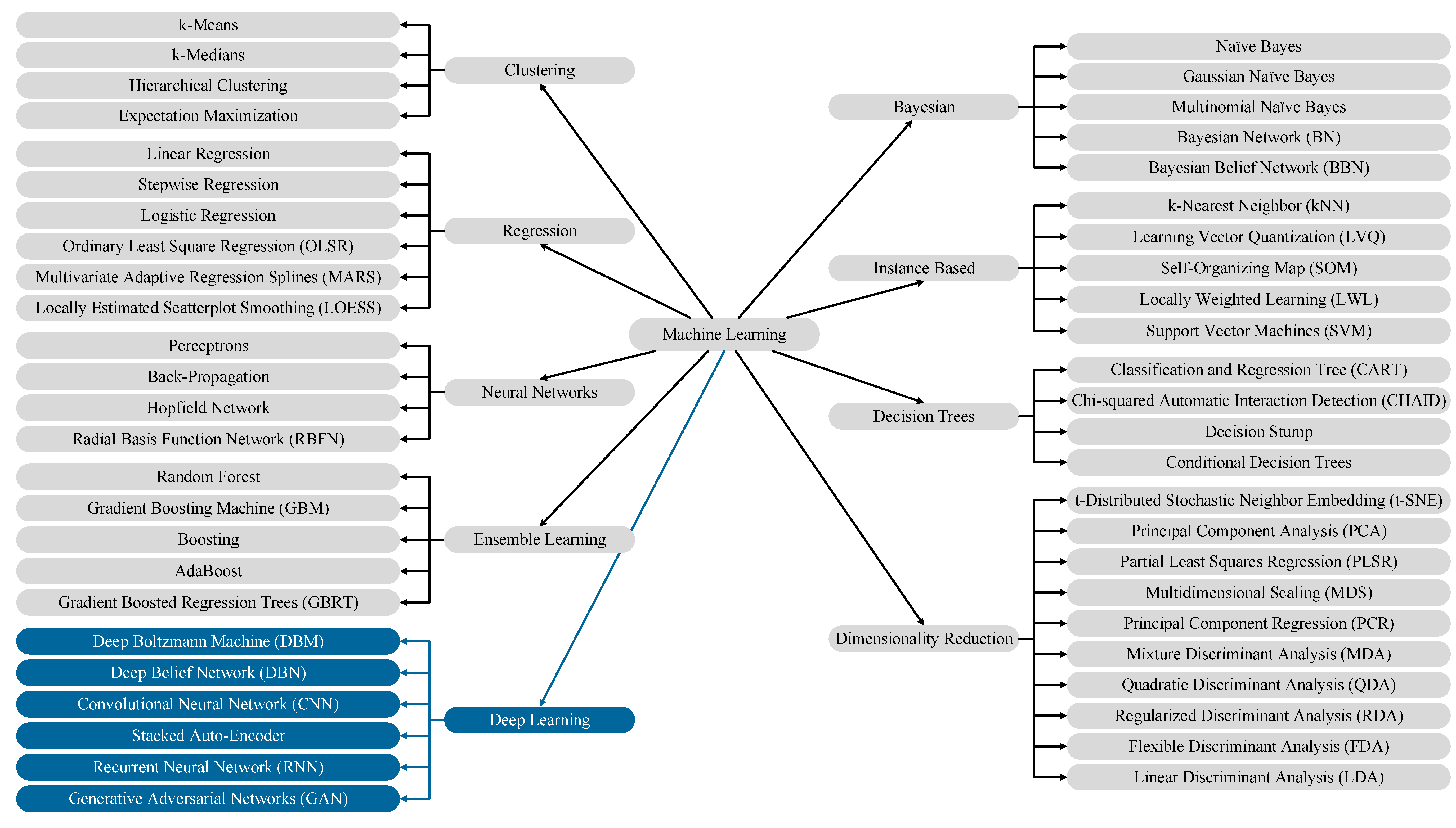
2. From Shallow to Deep Learning: An Overview
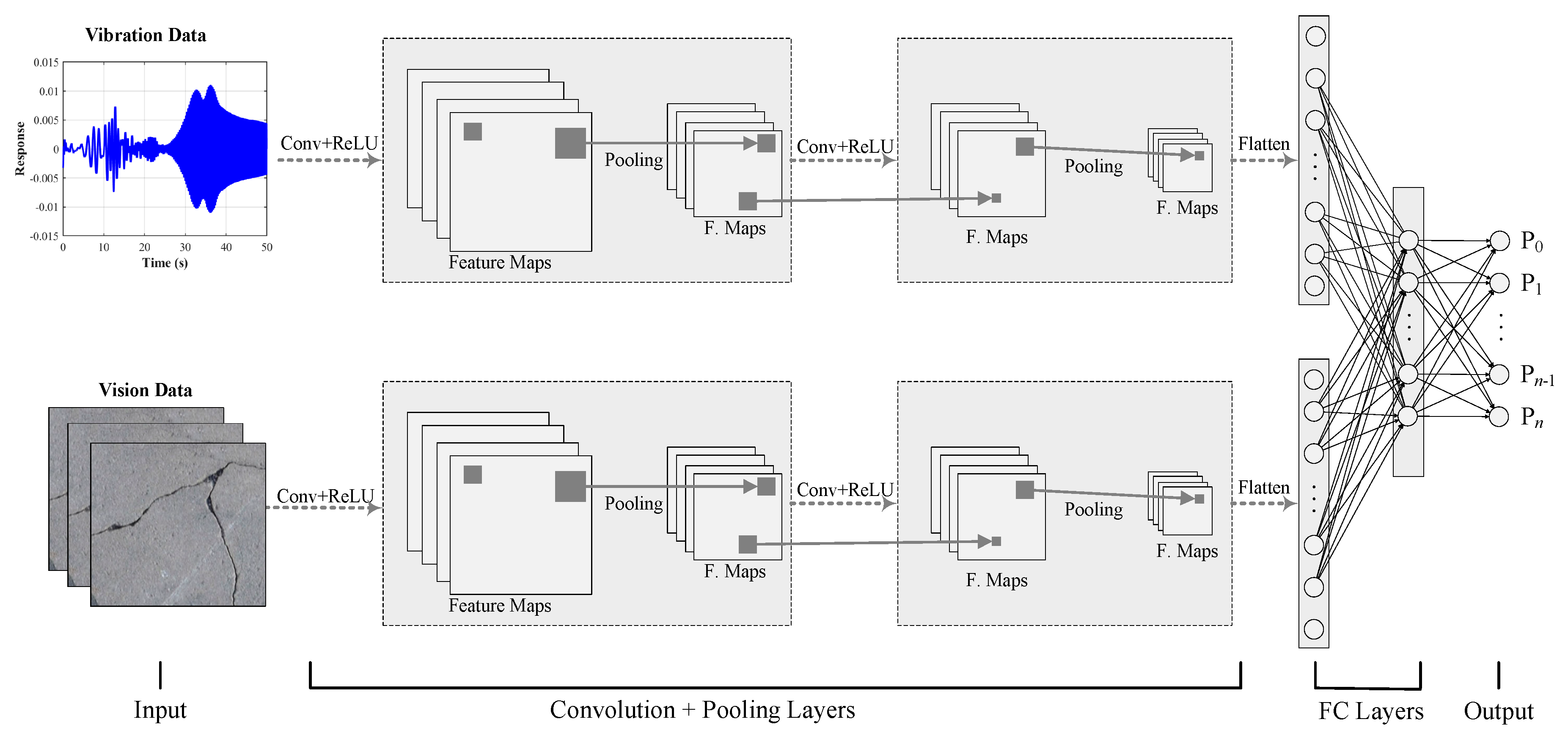
3. Vibration-Based SHM through DL
4. Vision-Based SHM through DL
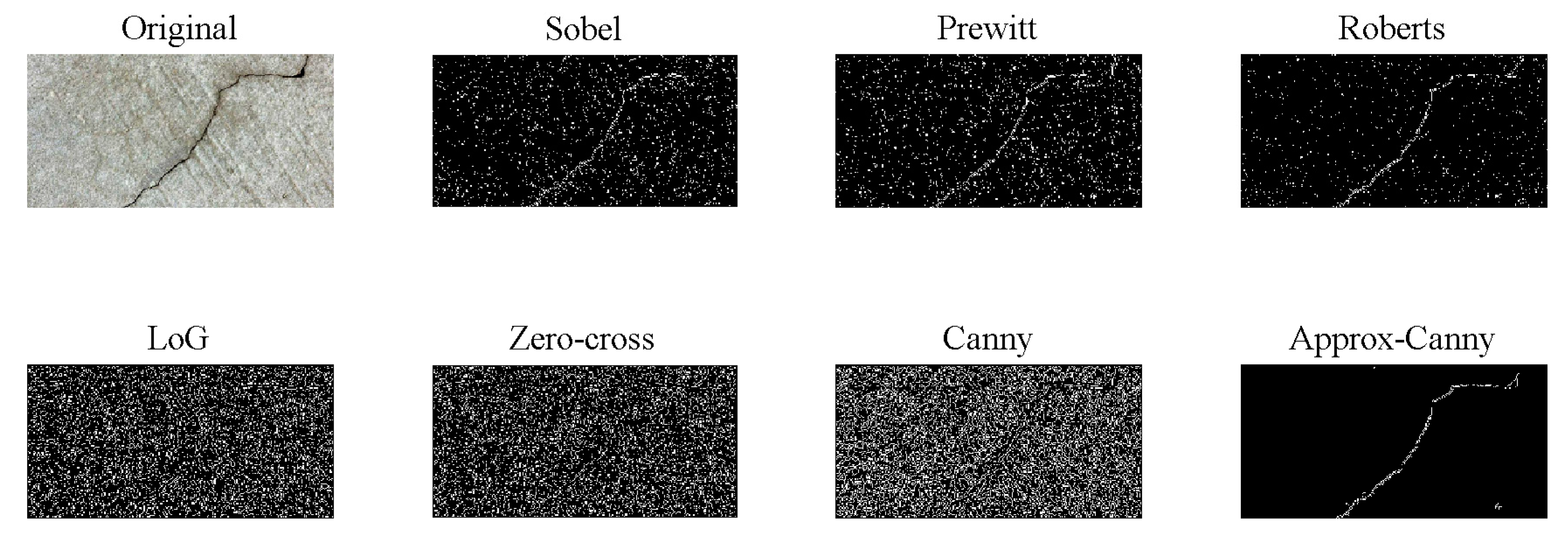
4.1. Crack Detection through Vision-Based DL
4.2. Structural-Component Recognition and Change Detection through Vision-Based DL
5. Applications of UAVs and Portable Smartphones for DL-Based SHM
6. Transfer Learning (TL) through Pre-Trained Models
7. Databases for DL-Based SHM
8. Software Frameworks for DL Applications
9. Summary and Prospects
- Despite remarkable advances since the introduction of DL-based SHM, current techniques in the literature cannot be considered to be fully automated, and human perception is not easy to replicate through vibration or vision-based DL algorithms [226]. Such capabilities should be addressed in future studies, including the significance of damage with respect to the type of structural components, materials, locations, and other environmental conditions.
- The number of available image databases of structural systems and other infrastructure components is very limited for SHM purposes, which leads to lower performance of the available trained models when new conditions arise, such as texture, joints, light, environment, pollutions, etc. In addition, environment-related issues cannot be perfectly simulated via generalized numerical models; therefore, larger datasets can only be formed by acquiring data from the real world.
- The nature of damages, as well as their significance, may differ from one structural component to another when considering the global structural context. Therefore, comprehensive hierarchical approaches should be devised in which structural component recognition is included as an essential first step before using image data. Such an approach has the potential to bring context in the assessment, evaluation, and interpretation of damage as part of SHM applications.
- Laboratory conditions are idealized in the available studies, and further research is needed for in-situ DL-based SHM. For example, the presence of wind and light may disrupt UAVs for the vision-based measurements. A clear example is the dynamic vibrations and deflections of a long suspension bridge under traffic and wind loads. In addition, damages occur gradually with small changes [145,146].
9.1. DL Applications in Vision-Based and Vibration-Based SHM
9.2. DL Applications in SHM Using Self-Powered Sensors
9.3. DL-Based SHM as Part of IoT and Smart Cities
9.4. DL Applications in SHM through Transfer Learning/Synthetic Simulation Data
9.5. DL-Based SHM Using Portable Smartphones, UAVs and GNSS
9.6. DL-Based Seismic Vibration Control for Smart Structures
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- ASCE. ASCE’s 2017 Infrastructure Report Card. Available online: https://www.infrastructurereportcard.org/ (accessed on 17 September 2018).
- FHWA. Bridge Condition by Highway System 2019. Available online: https://www.fhwa.dot.gov/bridge/nbi/no10/condition19.cfm (accessed on 11 May 2019).
- Sohn, H.; Farrar, C.R.; Hemez, F.M.; Shunk, D.D.; Stinemates, D.W.; Nadler, B.R.; Czarnecki, J.J. A review of structural health monitoring literature: 1996–2001. Los Alamos Natl. Lab. 2003, 20, 34–45. [Google Scholar]
- Salawu, O. Detection of structural damage through changes in frequency: A review. Eng. Struct. 1997, 19, 718–723. [Google Scholar] [CrossRef]
- An, Y.; Chatzi, E.; Sim, S.H.; Laflamme, S.; Blachowski, B.; Ou, J. Recent progress and future trends on damage identification methods for bridge structures. Struct. Control Health Monit. 2019, 12, e2416. [Google Scholar] [CrossRef]
- Mashayekhi, M.; Santini-Bell, E. Three-dimensional multiscale finite element models for in-service performance assessment of bridges. Comput.-Aided Civ. Infrastruct. Eng. 2019, 34, 385–401. [Google Scholar] [CrossRef]
- Mashayekhizadeh, M. Fatigue Assessment of Complex Structural Components of Steel Bridges Integrating Finite Element Models and Field-Collected Data. Bridge Struct. 2018, 15, 75–86. [Google Scholar]
- Cicero, T.; Cawley, P.; Simonetti, F.; Rokhlin, S.I. Potential and Limitations of a Deconvolution Approach for Guided Wave Structural Health Monitoring. Struct. Health Monit. 2009, 8, 381–395. [Google Scholar] [CrossRef]
- Rakha, T.; Gorodetsky, A. Review of Unmanned Aerial System (UAS) applications in the built environment: Towards automated building inspection procedures using drones. Autom. Constr. 2018, 93, 252–264. [Google Scholar] [CrossRef]
- Zhao, R.; Yan, R.; Chen, Z.; Mao, K.; Wang, P.; Gao, R.X. Deep learning and its applications to machine health monitoring. Mech. Syst. Signal Process. 2019, 115, 213–237. [Google Scholar] [CrossRef]
- Kaveh, A.; Dadras, A. Structural damage identification using an enhanced thermal exchange optimization algorithm. Eng. Optim. 2018, 50, 430–451. [Google Scholar] [CrossRef]
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436. [Google Scholar] [CrossRef] [PubMed]
- Kang, D.; Cha, Y.J. Autonomous UAVs for Structural Health Monitoring Using Deep Learning and an Ultrasonic Beacon System with Geo-Tagging. Comput.-Aided Civil Infrastruct. Eng. 2018, 18, 99–107. [Google Scholar] [CrossRef]
- Bao, Y.; Chen, Z.; Wei, S.; Xu, Y.; Tang, Z.; Li, H. The State of the Art of Data Science and Engineering in Structural Health Monitoring. Engineering 2019, 3, 34–38. [Google Scholar] [CrossRef]
- Fan, G.; Li, J.; Hao, H. Lost data recovery for structural health monitoring based on convolutional neural networks. Struct. Control. Health Monit. 2019, 26, e2433. [Google Scholar] [CrossRef]
- Very Deep Convolutional Networks for Large-Scale Image Recognition. Available online: https://arxiv.org/abs/1409.1556 (accessed on 9 May 2020).
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. In Proceedings of the Advances in Neural Information Processing Systems, Montréal, QC, Canada, 8–14 December 2019; pp. 1097–1105. [Google Scholar]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar]
- Pan, H.; Azimi, M.; Gui, G.; Yan, F.; Lin, Z. Vibration-Based Support Vector Machine for Structural Health Monitoring. In Proceedings of the International Conference on Experimental Vibration Analysis for Civil Engineering Structures, La Jolla, CA, USA, 12–14 July 2017; pp. 167–178. [Google Scholar]
- Pan, H.; Azimi, M.; Yan, F.; Lin, Z. Time-Frequency-Based Data-Driven Structural Diagnosis and Damage Detection for Cable-Stayed Bridges. J. Bridge Eng. 2018, 23, 56–70. [Google Scholar] [CrossRef]
- Salehi, H.; Burgueno, R. Emerging artificial intelligence methods in structural engineering. Eng. Struct. 2018, 171, 170–189. [Google Scholar] [CrossRef]
- Cha, Y.J.; Choi, W.; Suh, G.; Mahmoudkhani, S.; Büyüköztürk, O. Autonomous structural visual inspection using region-based deep learning for detecting multiple damage types. Comput.-Aided Civ. Infrastruct. Eng. 2018, 33, 731–747. [Google Scholar] [CrossRef]
- Mosalam, K.; Muin, S.; Gao, Y. New Direction in Structural Health Monitoring. NED Univ. J.Res. 2019, 2, 77–112. [Google Scholar] [CrossRef]
- Cha, Y.J.; Choi, W.; Büyüköztürk, O. Deep Learning-Based Crack Damage Detection Using Convolutional Neural Networks. Comput.-Aided Civ.Infrastruct. Eng. 2017, 32, 361–378. [Google Scholar] [CrossRef]
- Rafiei, M.H.; Khushefati, W.H.; Demirboga, R.; Adeli, H. Supervised Deep Restricted Boltzmann Machine for Estimation of Concrete. ACI Mater. J. 2017, 114, 88–95. [Google Scholar] [CrossRef]
- Zhang, A.; Wang, K.C.; Fei, Y.; Liu, Y.; Chen, C.; Yang, G.; Li, J.Q.; Yang, E.; Qiu, S. Automated pixel-level pavement crack detection on 3D asphalt surfaces with a recurrent neural network. Comput.-Aided Civ. Infrastruct. Eng. 2019, 34, 213–229. [Google Scholar] [CrossRef]
- Pathirage, C.S.N.; Li, J.; Li, L.; Hao, H.; Liu, W.; Wang, R. Development and application of a deep learning–based sparse autoencoder framework for structural damage identification. Struct. Health Monit. 2019, 18, 103–122. [Google Scholar] [CrossRef]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial nets. In Proceedings of the Advances in neural information processing systems, Montréal, QC, Canada, 8–13 December 2014; pp. 2672–2680. [Google Scholar]
- Bao, Y.; Tang, Z.; Li, H.; Zhang, Y. Computer vision and deep learning–based data anomaly detection method for structural health monitoring. Struct. Health Monit. 2019, 18, 401–421. [Google Scholar] [CrossRef]
- Atha, D.J.; Jahanshahi, M.R. Evaluation of deep learning approaches based on convolutional neural networks for corrosion detection. Struct. Health Monit. 2018, 17, 1110–1128. [Google Scholar] [CrossRef]
- Wei, F.; Yao, G.; Yang, Y.; Sun, Y. Instance-level recognition and quantification for concrete surface bughole based on deep learning. Autom. Constr. 2019, 107, 102920. [Google Scholar] [CrossRef]
- Dung, C.V.; Anh, L.D. Autonomous concrete crack detection using deep fully convolutional neural network. Autom. Constr. 2019, 99, 52–58. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, F.; Zhang, Y.D.; Zhu, Y.J. Road crack detection using deep convolutional neural network. In Proceedings of the 2016 IEEE International Conference on Image Processing (ICIP), Phoenix, AZ, USA, 25–28 September 2016; pp. 3708–3712. [Google Scholar]
- Ebrahimkhanlou, A.; Salamone, S. Single-Sensor Acoustic Emission Source Localization in Plate-Like Structures Using Deep Learning. Aerospacecraft 2018, 5, 50. [Google Scholar] [CrossRef]
- Dorafshan, S.; Maguire, M.; Qi, X. Automatic surface crack detection in concrete structures using OTSU thresholding and morphological operations. UTC Rep. 2016, 1, 2–8. [Google Scholar]
- Kaneko, S.; Oka, S.; Matsumiya, N. Detection of cracks in concrete structures from digital camera images. NTT Tech. Rev. 2012, 10, 23–28. [Google Scholar]
- Wu, L.; Mokhtari, S.; Nazef, A.; Nam, B.; Yun, H.-B. Improvement of crack-detection accuracy using a novel crack defragmentation technique in image-based road assessment. J. Comput. Civ. Eng. 2014, 30, 04014118. [Google Scholar] [CrossRef]
- Carden, E.P.; Fanning, P. Vibration based condition monitoring: A review. Struct. Health Monit. 2004, 3, 355–377. [Google Scholar] [CrossRef]
- Doebling, S.W.; Farrar, C.R.; Prime, M.B. A summary review of vibration-based damage identification methods. Shock. Vib. Dig. 1998, 30, 91–105. [Google Scholar] [CrossRef]
- Xu, J.; Fu, Z.; Han, Q.; Lacidogna, G.; Carpinteri, A. Micro-cracking monitoring and fracture evaluation for crumb rubber concrete based on acoustic emission techniques. Struct. Health Monit. 2018, 17, 946–958. [Google Scholar] [CrossRef]
- Kong, X.; Cai, C.S.; Hu, J. The state-of-the-art on framework of vibration-based structural damage identification for decision making. Appl. Sci. 2017, 7, 497. [Google Scholar] [CrossRef]
- Goh, L.; Bakhary, N.; Rahman, A.; Ahmad, B. Prediction of unmeasured mode shape using artificial neural network for damage detection. J. Teknol. 2012, 61, 52–56. [Google Scholar] [CrossRef][Green Version]
- Hakim, S.; Razak, H.A.; Ravanfar, S. Fault diagnosis on beam-like structures from modal parameters using artificial neural networks. Measurement 2015, 76, 45–61. [Google Scholar] [CrossRef]
- Castellini, P.; Revel, G.M. An experimental technique for structural diagnostic based on laser vibrometry and neural networks. Shock. Vib. 2000, 7, 381–397. [Google Scholar] [CrossRef]
- Jiang, S.F.; Zhang, C.M.; Koh, C. Structural damage detection by integrating data fusion and probabilistic neural network. Adv. Struct. Eng. 2006, 9, 445–458. [Google Scholar] [CrossRef]
- Jiang, S.F.; Zhang, C.M.; Yao, J. Eigen-level data fusion model by integrating rough set and probabilistic neural network for structural damage detection. Adv. Struct. Eng. 2011, 14, 333–349. [Google Scholar] [CrossRef]
- Zhou, X.; Ni, Y.; Zhang, F. Damage localization of cable-supported bridges using modal frequency data and probabilistic neural network. Math. Probl. Eng. 2014, 2014, 92–99. [Google Scholar] [CrossRef]
- Palomino, L.V.; Steffen, V.; Finzi Neto, R.M. Probabilistic neural network and fuzzy cluster analysis methods applied to impedance-based SHM for damage classification. Shock. Vib. 2014, 2014, 88–90. [Google Scholar] [CrossRef]
- Meruane, V. Online sequential extreme learning machine for vibration-based damage assessment using transmissibility data. J. Comput. Civ. Eng. 2015, 30, 04015042. [Google Scholar] [CrossRef]
- Abdeljaber, O.; Avci, O.; Kiranyaz, S.; Gabbouj, M.; Inman, D.J. Real-time vibration-based structural damage detection using one-dimensional convolutional neural networks. J. Sound Vib. 2017, 388, 154–170. [Google Scholar] [CrossRef]
- Avci, O.; Abdeljaber, O.; Kiranyaz, S.; Hussein, M.; Inman, D.J. Wireless and real-time structural damage detection: A novel decentralized method for wireless sensor networks. J. Sound Vib. 2018, 424, 158–172. [Google Scholar] [CrossRef]
- Abdeljaber, O.; Avci, O.; Kiranyaz, M.S.; Boashash, B.; Sodano, H.; Inman, D.J. 1-D CNNs for structural damage detection: Verification on a structural health monitoring benchmark data. Neurocomputing 2018, 275, 1308–1317. [Google Scholar] [CrossRef]
- Lin, Y.z.; Nie, Z.h.; Ma, H.w. Structural damage detection with automatic feature-extraction through deep learning. Comput.-Aided Civ. Infrastruct. Eng. 2017, 32, 1025–1046. [Google Scholar] [CrossRef]
- Wang, Z.; Cha, Y.j. Automated damage-sensitive feature extraction using unsupervised convolutional neural networks. In Proceedings of the Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems, Denver, DE, USA, 27 March 2018; p. 105981J. [Google Scholar]
- Pan, X.; Yang, T. Postdisaster image-based damage detection and repair cost estimation of reinforced concrete buildings using dual convolutional neural networks. Comput.-Aided Civ. Infrastruct. Eng. 2020, 1, 66–68. [Google Scholar] [CrossRef]
- Azimi, M.; Pekcan, G. Structural Health Monitoring Using Extremely Compressed Data through Deep Learning. Comput.-Aided Civ. Infrastruct. Eng. 2020, 35, 597–614. [Google Scholar] [CrossRef]
- Tang, Z.; Chen, Z.; Bao, Y.; Li, H. Convolutional neural network-based data anomaly detection method using multiple information for structural health monitoring. Struct. Control.Health Monit. 2019, 26, e2296. [Google Scholar] [CrossRef]
- Wu, R.T.; Jahanshahi, M.R. Deep Convolutional Neural Network for Structural Dynamic Response Estimation and System Identification. J. Eng. Mech. 2018, 145, 04018125. [Google Scholar] [CrossRef]
- Oh, B.K.; Glisic, B.; Kim, Y.; Park, H.S. Convolutional neural network-based wind-induced response estimation model for tall buildings. Comput.-Aided Civ. Infrastruct. Eng. 2019, 9, 14–23. [Google Scholar] [CrossRef]
- Khodabandehlou, H.; Pekcan, G.; Fadali, M.S. Vibration-based structural condition assessment using convolution neural networks. Struct. Control. Health Monit. 2019, 26, 74–77. [Google Scholar] [CrossRef]
- Li, S.; Sun, L. Detectability of Bridge-Structural Damage Based on Fiber-Optic Sensing through Deep-Convolutional Neural Networks. J. Bridge Eng. 2020, 25, 04020012. [Google Scholar] [CrossRef]
- Pathirage, C.S.N.; Li, J.; Li, L.; Hao, H.; Liu, W.; Ni, P. Structural damage identification based on autoencoder neural networks and deep learning. Eng. Struct. 2018, 172, 13–28. [Google Scholar] [CrossRef]
- Lu, Z.R.; Wang, L. An enhanced response sensitivity approach for structural damage identification: Convergence and performance. Int. J. Numer. Methods Eng. 2017, 111, 1231–1251. [Google Scholar] [CrossRef]
- Teng, S.; Chen, G.; Liu, G.; Lv, J.; Cui, F. Modal Strain Energy-Based Structural Damage Detection Using Convolutional Neural Networks. Appl. Sci. 2019, 9, 3376. [Google Scholar] [CrossRef]
- Sajedi, S.O.; Liang, X. Vibration-based semantic damage segmentation for large-scale structural health monitoring. Comput.-Aided Civ. Infrastruct. Eng. 2019, 3, 99–102. [Google Scholar] [CrossRef]
- Li, S.; Zuo, X.; Li, Z.; Wang, H. Applying Deep Learning to Continuous Bridge Deflection Detected by Fiber Optic Gyroscope for Damage Detection. Sensors 2020, 20, 911. [Google Scholar] [CrossRef]
- Lopez-Pacheco, M.; Morales-Valdez, J.; Yu, W. Frequency domain CNN and dissipated energy approach for damage detection in building structures. Soft Comput. 2015, 14, 1–20. [Google Scholar] [CrossRef]
- Hung, D.V.; Hung, H.M.; Anh, P.H.; Thang, N.T. Structural damage detection using hybrid deep learning algorithm. J. Sci. Technol. Civ. Eng. 2020, 14, 53–64. [Google Scholar]
- Ding, Z.; Li, J.; Hao, H. Structural damage identification by sparse deep belief network using uncertain and limited data. Struct. Control. Health Monit. 2020, 21, 18–22. [Google Scholar] [CrossRef]
- Fan, G.; Li, J.; Hao, H. Vibration Signal Denoising for Structural Health Monitoring by Residual Convolutional Neural Networks. Measurement 2020, 1, 107651. [Google Scholar] [CrossRef]
- Gatti, M. Structural health monitoring of an operational bridge: A case study. Eng. Struct. 2019, 195, 200–209. [Google Scholar] [CrossRef]
- Kim, H.; Ahn, E.; Shin, M.; Sim, S.-H. Crack and noncrack classification from concrete surface images using machine learning. Struct. Health Monit. 2019, 18, 725–738. [Google Scholar] [CrossRef]
- Dorafshan, S.; Maguire, M.; Hoffer, N.V.; Coopmans, C. Fatigue Crack Detection Using Unmanned Aerial Systems in Under-Bridge Inspection. Ida. Transp. Dep. 2017, 2, 1–120. [Google Scholar]
- Dorafshan, S.; Thomas, R.J.; Maguire, M. Fatigue crack detection using unmanned aerial systems in fracture critical inspection of steel bridges. J. Bridge Eng. 2018, 23, 04018078. [Google Scholar] [CrossRef]
- Jahanshahi, M.R.; Masri, S.F. Adaptive vision-based crack detection using 3D scene reconstruction for condition assessment of structures. Autom. Constr. 2012, 22, 567–576. [Google Scholar] [CrossRef]
- Li, L.; Wang, Q.; Zhang, G.; Shi, L.; Dong, J.; Jia, P. A method of detecting the cracks of concrete undergo high-temperature. Constr. Build. Mater. 2018, 162, 345–358. [Google Scholar] [CrossRef]
- Hamrat, M.; Boulekbache, B.; Chemrouk, M.; Amziane, S. Flexural cracking behavior of normal strength, high strength and high strength fiber concrete beams, using Digital Image Correlation technique. Constr. Build. Mater. 2016, 106, 678–692. [Google Scholar] [CrossRef]
- Rimkus, A.; Podviezko, A.; Gribniak, V. Processing Digital Images for Crack Localization in Reinforced Concrete Members. Procedia Eng. 2015, 122, 239–243. [Google Scholar] [CrossRef]
- Abdel-Qader, I.; Abudayyeh, O.; Kelly, M.E. Analysis of edge-detection techniques for crack identification in bridges. J. Comput. Civ. Eng. 2003, 17, 255–263. [Google Scholar] [CrossRef]
- Lim, R.S.; La, H.M.; Sheng, W. A Robotic Crack Inspection and Mapping System for Bridge Deck Maintenance. IEEE Trans. Autom. Sci. Eng. 2014, 11, 367–378. [Google Scholar] [CrossRef]
- Talab, A.M.A.; Huang, Z.; Xi, F.; HaiMing, L. Detection crack in image using Otsu method and multiple filtering in image processing techniques. Optimacal 2016, 127, 1030–1033. [Google Scholar] [CrossRef]
- Yamaguchi, T.; Nakamura, S.; Saegusa, R.; Hashimoto, S. Image-based crack detection for real concrete surfaces. IEEJ Trans. Electr. Electron. Eng. 2008, 3, 128–135. [Google Scholar] [CrossRef]
- Ebrahimkhanlou, A.; Farhidzadeh, A.; Salamone, S. Multifractal analysis of crack patterns in reinforced concrete shear walls. Struct. Health Monit. 2016, 15, 81–92. [Google Scholar] [CrossRef]
- Spencer, B.F., Jr.; Hoskere, V.; Narazaki, Y. Advances in Computer Vision-Based Civil Infrastructure Inspection and Monitoring. Engineering 2019, 3, 12–22. [Google Scholar] [CrossRef]
- Feng, D.; Feng, M.Q. Vision-based multipoint displacement measurement for structural health monitoring. Struct. Control. Health Monit. 2016, 23, 876–890. [Google Scholar] [CrossRef]
- Lecompte, D.; Vantomme, J.; Sol, H. Crack detection in a concrete beam using two different camera techniques. Struct. Health Monit. 2006, 5, 59–68. [Google Scholar] [CrossRef]
- Jahanshahi, M.R.; Masri, S.F. Parametric performance evaluation of wavelet-based corrosion detection algorithms for condition assessment of civil infrastructure systems. J. Comput. Civ. Eng. 2012, 27, 345–357. [Google Scholar] [CrossRef]
- Dawood, T.; Zhu, Z.; Zayed, T. Machine vision-based model for spalling detection and quantification in subway networks. Autom. Constr. 2017, 81, 149–160. [Google Scholar] [CrossRef]
- German, S.; Brilakis, I.; DesRoches, R. Rapid entropy-based detection and properties measurement of concrete spalling with machine vision for post-earthquake safety assessments. Adv. Eng. Inform. 2012, 26, 846–858. [Google Scholar] [CrossRef]
- Vaghefi, K.; Ahlborn, T.M.; Harris, D.K.; Brooks, C.N. Combined imaging technologies for concrete bridge deck condition assessment. J. Perform. Constr. Facil. 2013, 29, 04014102. [Google Scholar] [CrossRef]
- Mei, Q.; Gül, M.; Azim, M.R. Densely connected deep neural network considering connectivity of pixels for automatic crack detection. Autom. Constr. 2020, 110, 103018. [Google Scholar] [CrossRef]
- Xu, Y.; Bao, Y.; Chen, J.; Zuo, W.; Li, H. Surface fatigue crack identification in steel box girder of bridges by a deep fusion convolutional neural network based on consumer-grade camera images. Struct. Health Monit. 2018, 18, 653–674. [Google Scholar] [CrossRef]
- Ali, R.; Cha, Y.J. Subsurface damage detection of a steel bridge using deep learning and uncooled micro-bolometer. Constr. Build. Mater. 2019, 226, 376–387. [Google Scholar] [CrossRef]
- Fu, G.; Sun, P.; Zhu, W.; Yang, J.; Cao, Y.; Yang, M.Y.; Cao, Y. A deep-learning-based approach for fast and robust steel surface defects classification. Opt. Lasers Eng. 2019, 121, 397–405. [Google Scholar] [CrossRef]
- Dorafshan, S.; Thomas, R.J.; Maguire, M. Comparison of deep convolutional neural networks and edge detectors for image-based crack detection in concrete. Constr. Build. Mater. 2018, 186, 1031–1045. [Google Scholar] [CrossRef]
- Kim, H.; Ahn, E.; Cho, S.; Shin, M.; Sim, S.-H. Comparative analysis of image binarization methods for crack identification in concrete structures. Cem. Concr. Res. 2017, 99, 53–61. [Google Scholar] [CrossRef]
- Liu, Y.; Cho, S.; Spencer Jr, B.F.; Fan, J. Automated assessment of cracks on concrete surfaces using adaptive digital image processing. Smart Struct. Syst. 2014, 14, 719–741. [Google Scholar] [CrossRef]
- Giakoumis, I.; Nikolaidis, N.; Pitas, I. Digital image processing techniques for the detection and removal of cracks in digitized paintings. IEEE Trans. Image Process. 2006, 15, 178–188. [Google Scholar] [CrossRef]
- Jahanshahi, M.R.; Kelly, J.S.; Masri, S.F.; Sukhatme, G.S. A survey and evaluation of promising approaches for automatic image-based defect detection of bridge structures. Struct. Infrastruct. Eng. 2009, 5, 455–486. [Google Scholar] [CrossRef]
- Yang, X.; Li, H.; Yu, Y.; Luo, X.; Huang, T.; Yang, X. Automatic pixel-level crack detection and measurement using fully convolutional network. Comput.-Aided Civ. Infrastruct. Eng. 2018, 33, 1090–1109. [Google Scholar] [CrossRef]
- Mei, Q.; Gül, M. Multi-level feature fusion in densely connected deep-learning architecture and depth-first search for crack segmentation on images collected with smartphones. Struct. Health Monit. 2020. [Google Scholar] [CrossRef]
- Jahanshahi, M.R.; Masri, S.F. A new methodology for non-contact accurate crack width measurement through photogrammetry for automated structural safety evaluation. Smart Mater. Struct. 2013, 22, 035019. [Google Scholar] [CrossRef]
- Yeum, C.M.; Dyke, S.J. Vision-based automated crack detection for bridge inspection. Comput.-Aided Civ. Infrastruct. Eng. 2015, 30, 759–770. [Google Scholar] [CrossRef]
- Comparative Study of Deep Learning Software Frameworks. Available online: https://arxiv.org/abs/1511.06435 (accessed on 11 May 2019).
- Mohan, A.; Poobal, S. Crack detection using image processing: A critical review and analysis. Alex. Eng. J. 2018, 57, 787–798. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Rabah, M.; Elhattab, A.; Fayad, A. Automatic concrete cracks detection and mapping of terrestrial laser scan data. NRIAG J. Astron. Geophys. 2013, 2, 250–255. [Google Scholar] [CrossRef]
- Prasanna, P.; Dana, K.J.; Gucunski, N.; Basily, B.B.; La, H.M.; Lim, R.S.; Parvardeh, H. Automated crack detection on concrete bridges. IEEE Trans. on Autom. Sci. Eng. 2016, 13, 591–599. [Google Scholar] [CrossRef]
- Rawat, W.; Wang, Z. Deep Convolutional Neural Networks for Image Classification: A Comprehensive Review. Neural Comput. 2017, 29, 2352–2449. [Google Scholar] [CrossRef]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. Segnet: A deep convolutional encoder-decoder architecture for image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef] [PubMed]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE conference on computer vision and pattern recognition, Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Chen, F.; Jahanshahi, M.R. NB-CNN: Deep Learning-Based Crack Detection Using Convolutional Neural Network and Naïve Bayes Data Fusion. IEEE Trans. Ind. Electron. 2018, 65, 4392–4400. [Google Scholar] [CrossRef]
- Li, G.; Ma, B.; He, S.; Ren, X.; Liu, Q. Automatic Tunnel Crack Detection Based on U-Net and a Convolutional Neural Network with Alternately Updated Clique. Sensors 2020, 20, 717. [Google Scholar] [CrossRef] [PubMed]
- Soloviev, A.; Sobol, B.; Vasiliev, P. Identification of Defects in Pavement Images Using Deep Convolutional Neural Networks. Adv. Mater. 2019, 4, 615–626. [Google Scholar]
- Li, B.; Wang, K.C.; Zhang, A.; Yang, E.; Wang, G. Automatic classification of pavement crack using deep convolutional neural network. Int. J. Pavement Eng. 2020, 21, 457–463. [Google Scholar] [CrossRef]
- Tong, Z.; Gao, J.; Han, Z.; Wang, Z. Recognition of asphalt pavement crack length using deep convolutional neural networks. Road Mater. Pavement Des. 2018, 19, 1334–1349. [Google Scholar] [CrossRef]
- Fan, Z.; Li, C.; Chen, Y.; Mascio, P.D.; Chen, X.; Zhu, G.; Loprencipe, G. Ensemble of Deep Convolutional Neural Networks for Automatic Pavement Crack Detection and Measurement. Coatings 2020, 10, 152. [Google Scholar] [CrossRef]
- Automatic Pavement Crack Detection Based on Structured Prediction with the Convolutional Neural Network. Available online: https://arxiv.org/abs/1802.02208 (accessed on 7 January 2018).
- Wang, K.C.P.; Zhang, A.; Li, J.Q.; Fei, Y.; Chen, C.; Li, B. Deep Learning for Asphalt Pavement Cracking Recognition Using Convolutional Neural Network. Airfield Highw. Pavements 2017, 2017, 166–177. [Google Scholar] [CrossRef]
- FPCNet: Fast Pavement Crack Detection Network Based on Encoder-Decoder Architecture. Available online: https://arxiv.org/abs/1907.02248 (accessed on 14 July 2019).
- Kim, B.; Cho, S. Automated Vision-Based Detection of Cracks on Concrete Surfaces Using a Deep Learning Technique. Sensors 2018, 18, 3452. [Google Scholar] [CrossRef]
- Cha, Y.J.; Choi, W. Vision-Based Concrete Crack Detection Using a Convolutional Neural Network. Proc. Dyn. Civ. Struct. 2017, 2, 71–73. [Google Scholar]
- An, Y.K.; Jang, K.Y.; Kim, B.; Cho, S. Deep learning-based concrete crack detection using hybrid images. In Proceedings of the Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems, Denver, DE, USA, 3–7 March 2019; p. 1059812. [Google Scholar]
- Jang, K.; An, Y.K.; Kim, B.; Cho, S. Automated crack evaluation of a high-rise bridge pier using a ring-type climbing robot. Comput.-Aided Civ. Infrastruct. Eng. 2020, 4, 19–25. [Google Scholar] [CrossRef]
- Ali, R.; Gopal, D.L.; Cha, Y.-J. Vision-based concrete crack detection technique using cascade features. In Proceedings of the Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems, Denver, DE, USA, 3–7 March 2019; p. 105980L. [Google Scholar]
- Ramana, L.; Choi, W.; Cha, Y.-J. Fully automated vision-based loosened bolt detection using the Viola–Jones algorithm. Struct. Health Monit. 2019, 18, 422–434. [Google Scholar] [CrossRef]
- Ramana, L.; Choi, W.; Cha, Y.-J. Automated vision-based loosened bolt detection using the cascade detector. Sens. Instrum. 2017, 5, 23–28. [Google Scholar]
- Cha, Y.J.; You, K.; Choi, W. Vision-based detection of loosened bolts using the Hough transform and support vector machines. Autom. Constr. 2016, 71, 181–188. [Google Scholar] [CrossRef]
- Yeum, C.M.; Dyke, S.J.; Ramirez, J. Visual data classification in post-event building reconnaissance. Eng. Struct. 2018, 155, 16–24. [Google Scholar] [CrossRef]
- Xu, Y.; Wei, S.; Bao, Y.; Li, H. Automatic seismic damage identification of reinforced concrete columns from images by a region-based deep convolutional neural network. Struct. Control. Health Monit. 2019, 26, e2313. [Google Scholar] [CrossRef]
- Girshick, R. Fast R-CNN. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards real-time object detection with region proposal networks. Proc. Adv. Neural Inf. Process. Syst. 2015, 3, 91–99. [Google Scholar] [CrossRef]
- Wang, N.; Zhao, X.; Zou, Z.; Zhao, P.; Qi, F. Autonomous damage segmentation and measurement of glazed tiles in historic buildings via deep learning. Comput.-Aided Civ. Infrastruct. Eng. 2015, 6. [Google Scholar] [CrossRef]
- Deng, L.; Chu, H.-H.; Shi, P.; Wang, W.; Kong, X. Region-Based CNN Method with Deformable Modules for Visually Classifying Concrete Cracks. Appl. Sci. 2020, 10, 2528. [Google Scholar] [CrossRef]
- Zhang, X.; Rajan, D.; Story, B. Concrete crack detection using context-aware deep semantic segmentation network. Comput.-Aided Civ. Infrastruct. Eng. 2015, 8. [Google Scholar] [CrossRef]
- Zhang, A.; Wang, K.C.; Li, B.; Yang, E.; Dai, X.; Peng, Y.; Fei, Y.; Liu, Y.; Li, J.Q.; Chen, C. Automated pixel-level pavement crack detection on 3D asphalt surfaces using a deep-learning network. Comput.-Aided Civ. Infrastruct. Eng. 2017, 32, 805–819. [Google Scholar] [CrossRef]
- Xu, Y.; Li, S.; Zhang, D.; Jin, Y.; Zhang, F.; Li, N.; Li, H. Identification framework for cracks on a steel structure surface by a restricted Boltzmann machines algorithm based on consumer-grade camera images. Struct. Control. Health Monit. 2018, 25, e2075. [Google Scholar] [CrossRef]
- Hoskere, V.; Narazaki, Y.; Hoang, T.A.; Spencer, B.F., Jr. Vision-based Structural Inspection using Multiscale Deep Convolutional Neural Networks. In Proceedings of the 3rd Huixian International Forum on Earthquake Engineering for Young Researchers, Urbana-Champaign, IL, USA, 11–12 August 2012. [Google Scholar]
- Hoskere, V.; Narazaki, Y.; Hoang, T.A.; Spencer, B.F., Jr. Towards Automated Post-Earthquake Inspections with Deep Learning-based Condition-Aware Models. In Proceedings of the 7th World Conference on Structural Control and Monitoring, 7WCSCM, Qingdao, China, 22–25 July 2017. [Google Scholar]
- Yeum, C.M.; Choi, J.; Dyke, S.J. Automated region-of-interest localization and classification for vision-based visual assessment of civil infrastructure. Struct. Health Monit. 2018, 3, 1475921718765419. [Google Scholar] [CrossRef]
- Gao, Y.; Mosalam, K.M. Deep Transfer Learning for Image-Based Structural Damage Recognition. Comput.-Aided Civ. Infrastruct. Eng. 2018, 33, 748–768. [Google Scholar] [CrossRef]
- Liang, X. Image-based post-disaster inspection of reinforced concrete bridge systems using deep learning with Bayesian optimization. Comput.-Aided Civ. Infrastruct. Eng. 2018, 3, 112–119. [Google Scholar] [CrossRef]
- Narazakia, Y.; Hoskerea, V.; Hoanga, T.A.; Spencer, B.F., Jr. Automated Bridge Component Recognition using Video Data. In Proceedings of the 7th World Conference on Structural Control and Monitoring, 7WCSCM, Qingdao, China, 22–25 July 2017. [Google Scholar]
- Alcantarilla, P.F.; Stent, S.; Ros, G.; Arroyo, R.; Gherardi, R. Street-view change detection with deconvolutional networks. Auton. Robot. 2018, 42, 1301–1322. [Google Scholar] [CrossRef]
- Stent, S.; Gherardi, R.; Stenger, B.; Soga, K.; Cipolla, R. Visual change detection on tunnel linings. Mach. Vis. Appl. 2016, 27, 319–330. [Google Scholar] [CrossRef]
- Dorafshan, S.; Maguire, M. Bridge inspection: Human performance, unmanned aerial systems and automation. J. Civ. Struct. Health Monit. 2018, 8, 443–476. [Google Scholar] [CrossRef]
- Dorafshan, S.; Thomas, R.J.; Maguire, M. Benchmarking Image Processing Algorithms for Unmanned Aerial System-Assisted Crack Detection in Concrete Structures. Infrastructure 2019, 4, 19. [Google Scholar] [CrossRef]
- Zink, J.; Lovelace, B. Unmanned Aer. Veh. Bridge Insp. Demonstr. Proj. 2015, 32, 76–84. [Google Scholar]
- Wells, J.; Lovelace, B.; Engineers, C. Unmanned Aircr. Syst. Bridge Insp. Demonstr. Proj. Phase II Final. Rep. 2017, 13, 45–55. [Google Scholar]
- Tomiczek, A.P.; Bridge, J.A.; Ifju, P.G.; Whitley, T.J.; Tripp, C.S.; Ortega, A.E.; Poelstra, J.J.; Gonzalez, S.A. Small Unmanned Aerial Vehicle (sUAV) Inspections in GPS Denied Area beneath Bridges. In Proceedings of the Structures Congress, Fort Worth, TX, USA, 19–21 April 2018; pp. 205–216. [Google Scholar]
- Duque, L.; Seo, J.; Wacker, J. Synthesis of unmanned aerial vehicle applications for infrastructures. J. Perform. Constr. Facil. 2018, 32, 04018046. [Google Scholar] [CrossRef]
- Kim, H.; Lee, J.; Ahn, E.; Cho, S.; Shin, M.; Sim, S.-H. Concrete crack identification using a UAV incorporating hybrid image processing. Sensors 2017, 17, 2052. [Google Scholar] [CrossRef] [PubMed]
- Morgenthal, G.; Hallermann, N. Quality assessment of unmanned aerial vehicle (UAV) based visual inspection of structures. Adv. Struct. Eng. 2014, 17, 289–302. [Google Scholar] [CrossRef]
- Yoon, H.; Shin, J.; Spencer Jr, B.F. Structural displacement measurement using an unmanned aerial system. Comput.-Aided Civ. Infrastruct. Eng. 2018, 33, 183–192. [Google Scholar] [CrossRef]
- Pereira, F.C.; Pereira, C.E. Embedded image processing systems for automatic recognition of cracks using UAVs. IFAC-PapersOnLine 2015, 48, 16–21. [Google Scholar] [CrossRef]
- Jang, K.; Kim, N.; An, Y.-K. Deep learning–based autonomous concrete crack evaluation through hybrid image scanning. Struct. Health Monit. 2019, 18, 1475921718821719. [Google Scholar] [CrossRef]
- Kim, I.-H.; Jeon, H.; Baek, S.-C.; Hong, W.-H.; Jung, H.-J. Application of crack identification techniques for an aging concrete bridge inspection using an unmanned aerial vehicle. Sensors 2018, 18, 1881. [Google Scholar] [CrossRef]
- Kang, D.; Cha, Y.-J. Damage detection with an autonomous UAV using deep learning. In Proceedings of the Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems, Berlin, Germany, 20–27 July 2018; p. 1059804. [Google Scholar]
- Huynh, T.-C.; Park, J.-H.; Jung, H.-J.; Kim, J.-T. Quasi-autonomous bolt-loosening detection method using vision-based deep learning and image processing. Autom. Constr. 2019, 105, 102844. [Google Scholar] [CrossRef]
- Chaiyasarn, K.; Khan, W.; Ali, L.; Sharma, M.; Brackenbury, D.; DeJong, M. Crack Detection in Masonry Structures using Convolutional Neural Networks and Support Vector Machines. In Proceedings of the International Symposium on Automation and Robotics in Construction, Berlin, Germany, 20–25 July 2018; pp. 1–8. [Google Scholar]
- Lei, B.; Wang, N.; Xu, P.; Song, G. New crack detection method for bridge inspection using UAV incorporating image processing. J. Aerosp. Eng. 2018, 31, 04018058. [Google Scholar] [CrossRef]
- Duarte, D.; Nex, F.; Kerle, N.; Vosselman, G. Multi-resolution feature fusion for image classification of building damages with convolutional neural networks. Remote. Sens. 2018, 10, 1636. [Google Scholar] [CrossRef]
- Hoskere, V.; Park, J.-W.; Yoon, H.; Spencer Jr, B.F. Vision-Based Modal Survey of Civil Infrastructure Using Unmanned Aerial Vehicles. J. Struct. Eng. 2019, 145, 04019062. [Google Scholar] [CrossRef]
- Gopalakrishnan, K. Symposium on Automation and Robotics. Deep Learn. Pavement Image Anal. Autom. Distress Detect. Rev. 2018, 9. [Google Scholar] [CrossRef]
- Zhang, Y.; Sun, X.; Loh, K.J.; Su, W.; Xue, Z.; Zhao, X. Autonomous bolt loosening detection using deep learning. Struct. Health Monit. 2019, 19, 1475921719837509. [Google Scholar] [CrossRef]
- Beckman, G.H.; Polyzois, D.; Cha, Y.J. Deep learning-based automatic volumetric damage quantification using depth camera. Autom. Constr. 2019, 99, 114–124. [Google Scholar] [CrossRef]
- Zhao, X.; Han, R.; Yu, Y.; Hu, W.; Jiao, D.; Mao, X.; Li, M.; Ou, J. Smartphone-based mobile testing technique for quick bridge cable–force measurement. J. Bridge Eng. 2016, 22, 06016012. [Google Scholar] [CrossRef]
- Li, S.; Zhao, X. Convolutional neural networks-based crack detection for real concrete surface. In Proceedings of the Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems, Berlin, Germany, 20–25 July 2018; p. 105983V. [Google Scholar]
- Li, S.; Zhao, X. Image-Based Concrete Crack Detection Using Convolutional Neural Network and Exhaustive Search Technique. Adv. Civ. Eng. 2019, 2019, 6520620. [Google Scholar] [CrossRef]
- Wang, N.; Zhao, X.; Zhao, P.; Zhang, Y.; Zou, Z.; Ou, J. Automatic damage detection of historic masonry buildings based on mobile deep learning. Autom. Constr. 2019, 103, 53–66. [Google Scholar] [CrossRef]
- Pauly, L.; Hogg, D.; Fuentes, R.; Peel, H. Deeper networks for pavement crack detection. In Proceedings of the 34th ISARC, Taipei, Taiwan, 28–31 June 2017; pp. 479–485. [Google Scholar]
- Maeda, H.; Sekimoto, Y.; Seto, T.; Kashiyama, T.; Omata, H. Road damage detection and classification using deep neural networks with smartphone images. Comput.-Aided Civ. Infrastruct. Eng. 2018, 33, 1127–1141. [Google Scholar] [CrossRef]
- Pan, S.J.; Yang, Q. A survey on transfer learning. IEEE Trans. Knowl. Data Eng. 2010, 22, 1345–1359. [Google Scholar] [CrossRef]
- Zhang, K.; Cheng, H.D.; Zhang, B. Unified Approach to Pavement Crack and Sealed Crack Detection Using Preclassification Based on Transfer Learning. J. Comput. Civ. Eng. 2018, 32, 04018001. [Google Scholar] [CrossRef]
- Gopalakrishnan, K.; Khaitan, S.K.; Choudhary, A.; Agrawal, A. Deep Convolutional Neural Networks with transfer learning for computer vision-based data-driven pavement distress detection. Constr. Build. Mater. 2017, 157, 322–330. [Google Scholar] [CrossRef]
- Perez, H.; Tah, J.H.; Mosavi, A. Deep Learning for Detecting Building Defects Using Convolutional Neural Networks. Sensors 2019, 19, 3556. [Google Scholar] [CrossRef] [PubMed]
- Özgenel, Ç.F.; Sorguç, A.G. Performance Comparison of Pretrained Convolutional Neural Networks on Crack Detection in Buildings. In Proceedings of the International Symposium on Automation and Robotics in Construction, Berlin, Germany, 20–25 July 2018; pp. 1–8. [Google Scholar]
- Wu, R.T.; Singla, A.; Jahanshahi, M.R.; Bertino, E.; Ko, B.J.; Verma, D. Pruning deep convolutional neural networks for efficient edge computing in condition assessment of infrastructures. Comput.-Aided Civ. Infrastruct. Eng. 2019, 34, 774–789. [Google Scholar] [CrossRef]
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Li, K.; Fei-Fei, L. ImageNet: A large-scale hierarchical image database. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009. [Google Scholar]
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the inception architecture for computer vision. In Proceedings of the IEEE conference on computer vision and pattern recognition, Boston, MA, USA, 7–12 June 2015; pp. 2818–2826. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE conference on computer vision and pattern recognition, Las Vegas, NV, USA, 26–30 June 2016; pp. 770–778. [Google Scholar]
- Serre, T.; Wolf, L.; Bileschi, S.; Riesenhuber, M.; Poggio, T. Robust object recognition with cortex-like mechanisms. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 411–426. [Google Scholar] [CrossRef]
- Zeiler, M.D.; Fergus, R. Visualizing and understanding convolutional networks. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; pp. 818–833. [Google Scholar]
- Zhang, A.; Wang, K.C.; Fei, Y.; Liu, Y.; Tao, S.; Chen, C.; Li, J.Q.; Li, B. Deep learning–based fully automated pavement crack detection on 3D asphalt surfaces with an improved CrackNet. J. Comput. Civ. Eng. 2018, 32, 04018041. [Google Scholar] [CrossRef]
- Artificial Intelligence Assisted Infrastructure Assessment Using Mixed Reality Systems. Available online: https://arxiv.org/abs/1812.05659 (accessed on 9 May 2020).
- Gopalakrishnan, K.; Gholami, H.; Vidyadharan, A.; Choudhary, A.; Agrawal, A. Crack Damage Detection in Unmanned Aerial Vehicle Images of Civil Infrastructure Using Pre-Trained Deep Learning Model. Int. J. Traffic Transp. Eng 2018, 8, 1–14. [Google Scholar]
- Park, S.; Bang, S.; Kim, H.; Kim, H. Patch-Based Crack Detection in Black Box Images Using Convolutional Neural Networks. J. Comput. Civ. Eng. 2019, 33, 04019017. [Google Scholar] [CrossRef]
- Dung, C.V.; Sekiya, H.; Hirano, S.; Okatani, T.; Miki, C. A vision-based method for crack detection in gusset plate welded joints of steel bridges using deep convolutional neural networks. Autom. Constr. 2019, 102, 217–229. [Google Scholar] [CrossRef]
- Narazaki, Y.; Hoskere, V.; Hoang, T.A.; Spencer, B.J. Vision-based automated bridge component recognition with high-level scene consistency. Comput.-Aided Civ. Infrastruct. Eng. 2019, 9, 465–482. [Google Scholar] [CrossRef]
- Narazaki, Y.; Hoskere, V.; Hoang, T.A.; Spencer, B.F., Jr. Automated Vision-Based Bridge Component Extraction Using Multiscale Convolutional Neural Networks. Available online: https://arxiv.org/abs/1812.05659 (accessed on 9 May 2020).
- Liu, H.; Zhang, Y. Image-driven structural steel damage condition assessment method using deep learning algorithm. Measurement 2019, 133, 168–181. [Google Scholar] [CrossRef]
- Nahata, D.; Mulchandani, H.; Bansal, S.; Muthukumar, G. Post-Earthquake. Assessment. Buildlings Using Deep Learning. J. Comput. Civ. Eng. 2019, 8, 330–345. [Google Scholar]
- Bang, S.; Park, S.; Kim, H.; Kim, H. Encoder–decoder network for pixel-level road crack detection in black-box images. Comput.-Aided Civ. Infrastruct. Eng. 2019. [Google Scholar] [CrossRef]
- Szegedy, C.; Ioffe, S.; Vanhoucke, V.; Alemi, A.A. Inception-v4, inception-resnet and the impact of residual connections on learning. In Proceedings of the 31st AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017. [Google Scholar]
- Wang, N.; Zhao, Q.; Li, S.; Zhao, X.; Zhao, P. Damage classification for masonry historic structures using convolutional neural networks based on still images. Comput.-Aided Civ. Infrastruct. Eng. 2018, 33, 1073–1089. [Google Scholar] [CrossRef]
- Dick, K.; Russell, L.; Souley Dosso, Y.; Kwamena, F.; Green, J.R. Deep learning for critical infrastructure resilience. J. Infrastruct. Syst. 2019, 25, 05019003. [Google Scholar] [CrossRef]
- Ni, F.; Zhang, J.; Chen, Z. Zernike-moment measurement of thin-crack width in images enabled by dual-scale deep learning. Comput.-Aided Civ. and Infrastruct. Eng. 2018, 32, 67–69. [Google Scholar] [CrossRef]
- Narazaki, Y.; Hoskere, V.; Hoang, T.A.; Spencer, B.F., Jr. Vision-based Automated Bridge Component Recognition Integrated With High-level Scene Understanding. In Proceedings of the 13th International Workshop on Advanced Smart Materials and Smart Structures Technology, Tokyo, Japan, 22–23 July 2016. [Google Scholar]
- Ahmed, H.; La, H.; Pekcan, G. Rebar Detection and Localization for Non-Destructive Infrastructure Evaluation of Bridges using Deep Residual Networks. In Proceedings of the 14th International Symposium on Visual Computing: ISVC’19, Lake Tahoe, CA, USA, 7–9 October 2019. [Google Scholar]
- Kim, B.; Lee, Y.; Cho, S. Deep learning-based rapid inspection of concrete structures. In Proceedings of the Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems, Berlin, Germany, 20–25 July 2018; p. 1059813. [Google Scholar]
- Zhao, X.; Li, S.; Su, H.; Zhou, L.; Loh, K.J. Image-Based Comprehensive Maintenance and Inspection Method for Bridges Using Deep Learning. In Proceedings of the ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems, San Antonio, TA, USA, 10–12 September 2018. [Google Scholar]
- Dorafshan, S.; Thomas, R.J.; Coopmans, C.; Maguire, M. Deep learning neural networks for suas-assisted structural inspections: Feasibility and application. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 874–882. [Google Scholar]
- Suh, G.; Cha, Y.-J. Deep faster R-CNN-based automated detection and localization of multiple types of damage. In Proceedings of the Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2018, Berlin, Germany, 20–25 July 2018; p. 105980T. [Google Scholar]
- Beckman, G.H.; Polyzois, D.; Cha, Y.-J. Automated volumetric damage detection and quantification using region-based convolution neural networks and an inexpensive depth camera. In Proceedings of the Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems, Berlin, Germany, 20–25 July 2018; p. 105980W. [Google Scholar]
- SDNET2018: A Concrete Crack Image Dataset for Machine Learning Applications. Available online: https://digitalcommons.usu.edu/all_datasets/48/ (accessed on 9 May 2020).
- Gao, Y.; Kong, B.; Mosalam, K.M. Deep leaf-bootstrapping generative adversarial network for structural image data augmentation. Comput.-Aided Civ. Infrastruct. Eng. 2019, 34, 755–773. [Google Scholar] [CrossRef]
- Zhang, Y.; Miyamori, Y.; Mikami, S.; Saito, T. Vibration-based structural state identification by a 1-dimensional convolutional neural network. Comput.-Aided Civ. Infrastruct. Eng. 2019, 9, 15–19. [Google Scholar] [CrossRef]
- Yu, Y.; Wang, C.; Gu, X.; Li, J. A novel deep learning-based method for damage identification of smart building structures. Struct. Health Monit. 2019, 18, 143–163. [Google Scholar] [CrossRef]
- Gulgec, N.S.; Takáč, M.; Pakzad, S.N. Convolutional Neural Network Approach for Robust Structural Damage Detection and Localization. J. Comput. Civ. Eng. 2019, 33, 04019005. [Google Scholar] [CrossRef]
- Ye, X.W.; Jin, T.; Chen, P.Y. Structural crack detection using deep learning–based fully convolutional networks. Adv. Struct. Eng. 2019, 9, 1369433219836292. [Google Scholar] [CrossRef]
- Gao, Y.; Li, K.; Mosalam, K.; Günay, S. Deep Residual Network with Transfer Learning for Imagebased Structural Damage Recognition. In Proceedings of the Eleventh US National Conference on Earthquake Engineering, Integrating Science, Engineering Policy, San Francisco, CA, USA, 16–25 June 2018. [Google Scholar]
- Silva, W.R.L.d.; Lucena, D.S.d. Concrete cracks detection based on deep learning image classification. Proc. Multidiscip. Digit. Publ. Inst. Proc. 2001, 38, 489. [Google Scholar] [CrossRef]
- Sharma, M.; Anotaipaiboon, W.; Chaiyasarn, K. Crack Detection in Masonry Structures using Convolutional Neural Networks and Support Vector Machines. In Proceedings of the 35th International Symposium on Automation and Robotics in Construction (ISARC 2018), Berlin, Germany, 20–25 July 2018. [Google Scholar]
- Kumar, S.S.; Abraham, D.M.; Jahanshahi, M.R.; Iseley, T.; Starr, J. Automated defect classification in sewer closed circuit television inspections using deep convolutional neural networks. Autom. Constr. 2018, 91, 273–283. [Google Scholar] [CrossRef]
- De Oliveira, M.; Monteiro, A.; Vieira Filho, J. A New Structural Health Monitoring Strategy Based on PZT Sensors and Convolutional Neural Network. Sensors 2018, 18, 2955. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Zhao, W.; Zhang, X.; Zhou, Q. A two-stage crack detection method for concrete bridges using Convolutional Neural Networks. IEICE Trans. Inf. Syst. 2018, 101, 3249–3252. [Google Scholar] [CrossRef]
- Ji, M.; Liu, L.; Buchroithner, M. Identifying Collapsed Buildings Using Post-Earthquake Satellite Imagery and Convolutional Neural Networks: A Case Study of the 2010 Haiti Earthquake. Remote. Sens. 2018, 10, 1689. [Google Scholar] [CrossRef]
- Modarres, C.; Astorga, N.; Droguett, E.L.; Meruane, V. Convolutional neural networks for automated damage recognition and damage type identification. Struct. Control. Health Monit. 2018, 25, e2230. [Google Scholar] [CrossRef]
- Pouyanfar, S.; Sadiq, S.; Yan, Y.; Tian, H.; Tao, Y.; Reyes, M.P.; Shyu, M.-L.; Chen, S.C.; Iyengar, S. A survey on deep learning: Algorithms, techniques, and applications. ACM Comput. Surv. (CSUR) 2018, 51, 1–36. [Google Scholar] [CrossRef]
- Abadi, M.; Barham, P.; Chen, J.; Chen, Z.; Davis, A.; Dean, J.; Devin, M.; Ghemawat, S.; Irving, G.; Isard, M. Tensorflow: A system for large-scale machine learning. In Proceedings of the OSDI, Savannah, GA, USA, 2–4 November 2016; pp. 265–283. [Google Scholar]
- Fonnegra, R.D.; Blair, B.; Díaz, G.M. Performance comparison of deep learning frameworks in image classification problems using convolutional and recurrent networks. In Proceedings of the 2017 IEEE Colombian Conference on Communications and Computing (COLCOM), Cartagena, Colombia, 16–18 August 2017; pp. 1–6. [Google Scholar]
- Shi, S.; Wang, Q.; Xu, P.; Chu, X. Benchmarking state-of-the-art deep learning software tools. In Proceedings of the 2016 7th International Conference on Cloud Computing and Big Data (CCBD), Macau, China, 16–18 November 2016; pp. 99–104. [Google Scholar]
- Chollet, F. Keras. Available online: https://www.scirp.org/(S(351jmbntvnsjt1aadkposzje))/reference/ReferencesPapers.aspx?ReferenceID=1887532 (accessed on 9 May 2020).
- Jia, Y.; Shelhamer, E.; Donahue, J.; Karayev, S.; Long, J.; Girshick, R.; Guadarrama, S.; Darrell, T. Caffe: Convolutional architecture for fast feature embedding. In Proceedings of the 22nd ACM international conference on Multimedia, New York, NY, USA, 14 May 2014; pp. 675–678. [Google Scholar]
- Zhang, T.; Biswal, S.; Wang, Y. SHMnet: Condition Assessment of Bolted Connection with Beyond Human-level Performance. Struct. Health Monit. 2019, 9. [Google Scholar] [CrossRef]
- Roohi, M.; Hernandez, E.M.; Rosowsky, D. Nonlinear Seismic Response Reconstruction and Performance Assessment of Instrumented Wood-frame Buildings—Validation using NEESWood Capstone Full-Scale Tests. Struct. Control. Health Monit. 2019, 8. [Google Scholar] [CrossRef]
- Aono, K.; Kondapalli, S.H.; Lajnef, N.; Pekcan, G.; Faridazar, F.; Chakrabartty, S. Self-powered Sensors to Facilitate Infrastructural Internet-of-Things for Smart Structures. In Proceedings of the 13th International Workshop on Advanced Smart Materials and Smart Structures Technology, Tokyo, Japan, 22–23 July 2017. [Google Scholar]
- Fu, Y.; Mechitov, K.; Hoang, T.; Kim, J.R.; Lee, D.H.; Spencer, B.F. Development and full-scale validation of high-fidelity data acquisition on a next-generation wireless smart sensor platform. Adv. Struct. Eng. 2019, 22, 1369433219866093. [Google Scholar] [CrossRef]
- Yu, J.; Meng, X.; Yan, B.; Xu, B.; Fan, Q.; Xie, Y. Global Navigation Satellite System-based positioning technology for structural health monitoring: A review. Struct. Control Health Monit. 2020, 27, e2467. [Google Scholar] [CrossRef]
- Design of Structural Vibration Control Using Smart Materials and Devices for Earthquake-Resistant and Resilient Buildings. Available online: https://library.ndsu.edu/ir/handle/10365/28588 (accessed on 9 May 2020).
- Azimi, M.; Yeznabad, A.M. Swarm-Based Parallel Control of Adjacent Irregular Buildings Considering Soil–Structure Interaction. J. Sens. Actuator Netw. 2020, 9, 18. [Google Scholar] [CrossRef]
- Mnih, V.; Kavukcuoglu, K.; Silver, D.; Rusu, A.A.; Veness, J.; Bellemare, M.G.; Graves, A.; Riedmiller, M.; Fidjeland, A.K.; Ostrovski, G. Human-level control through deep reinforcement learning. Nature 2015, 518, 529–533. [Google Scholar] [CrossRef]
- Zhu, M.; McKenna, F.; Scott, M.H. OpenSeesPy: Python library for the OpenSees finite element framework. Software 2018, 7, 6–11. [Google Scholar] [CrossRef]
- Brockman, G.; Cheung, V.; Pettersson, L.; Schneider, J.; Schulman, J.; Tang, J.; Zaremba, W. Openai Gym. Available online: https://arxiv.org/abs/1606.01540 (accessed on 9 May 2020).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pre-Trained Network | Purpose/Application | Researches in SHM |
|---|---|---|
| VGG (VGG-16, 19) [17] |
| [32,34,102,141,144,145,176,178,186,187,188,189,190,191,192,193,194] |
| Inception (Inception-V2, V3, V4) 1 [19,181,195] |
| [33,169,176,196,197] |
| ResNet (ResNet-20, 50, 101, 152) [185] |
| [33,139,144,171,178,190,191,194,198,199,200] |
| AlexNet [18] |
| [73,96,122,124,143,178,193,196,201,202,203] |
| GoogleNet [19] |
| [143,157,169,178,196,198,202] |
| MobileNet |
| [173] |
| UNet, SegCaps, SegNet [113] |
| [186,194] |
| ZF-net [187] |
| [167,203,204,205] |
| CrackNet, CrackNet-R [139,188] |
| [27,101,194] |
| Reference(s) | Goal | Dataset |
|---|---|---|
| Zhang et al. [208] | Vibration-based structural state identification | 8595, 14,465, and 4800 raw acceleration data (9 Ch. × 10,000) for each of the bridges |
| Pathirage et al. [28] | Damage identification by making a deep mapping between the modal characteristics and structural damage | 20,000 data samples containing the first three frequencies and mode shapes obtained by Eigen analysis of finite element model |
| Avci et al. [52] | Wireless vibration-based bolt loosening detection | 330 signals each containing 245,760 samples of velocity |
| Pathirage [63] | Vibration-based damage detection and finding the stiffness reduction of elements | Modal information of 10,300 damage cases that include the first seven frequencies (7 arrays) and the regarding mode shapes at 14 beam-column joints (98 arrays) |
| Tang et al. [58] | Data anomaly detection and classification | 10,014 time and frequency response of a long-span cable-stayed bridge stacked in two channels with the resolution of 100 × 100 |
| Wang and Cha [55] | Vibration-based loosened bolt localization | 6800 frequency domain 50 × 50 matrices calculated by Fast Fourier Transformation (FFT) of acceleration signals of a lab-scale bridge |
| Yu et al. [209] | Damage identification and localization of buildings controlled with smart devices | 1900 group of 5 × 2832 matrices of power spectral density |
| Lin et al. [54] | Vibration-based feature extraction for damage detection | 459 set of vertical acceleration signals collected from nine nodes in 1024 × 9 matrices |
| Bao et al. [30] | Vision-based anomaly detection and classification in a long-span cable-stayed bridge | 333,792 of acceleration signals plotted in 100 × 100 one channel images |
| Abdeljaber et al. [53] | Bolt loosening localization on a lab-scale steel grandstand simulator | 749 × 12 vectors of acceleration signals with 128 × 1 dimension |
| Reference(s) | Goal | Dataset |
|---|---|---|
| Gulgec et al. [210] | Robust damage detection and localization of steel connections | 30,000 damaged and 30,000 healthy strain distribution matrices in 28 × 56 dimension |
| Ye et al. [211] | Concrete crack detection | 14,000 concrete crack images with 80 × 80 pixel resolutions obtained from a concrete beam test |
| Xu et al. [131] | Multi-type seismic damage identification and localization | 2400 images with 640 × 640 pixel resolution of concrete cracking, concrete spalling, rebar exposure, and rebar buckling |
| Nahata et al. [193] | Post-earthquake damage extent identification of buildings | 1200 RGB images with 224 × 224 × 3 pixel resolution |
| Beckman et al. [167] | Concrete spalling damage detection and quantification | 444 concrete spalling images with the resolution of 853 × 1440 pixels |
| Jang et al. [157] | Detection of micro and macro concrete cracks | 20,000 hybrid combining vision and infrared thermography of concrete crack and intact images with 224 × 224 pixel resolution |
| Dung and Anh [33] | Concrete crack detection, segmentation, and density evaluation | A public dataset of 40,000 concrete crack 227 × 227 pixel images |
| Zhang et al. [166] | Real-time autonomous bolt loosening detection | 300 tight and loosened bolt images with 224 × 224 pixels |
| Wang et al. [171,196] | Spalling detection for historic masonry structures | 500 images with 500 × 500 pixel resolutions |
| Dung et al. [189] | Crack detection of gusset plate welding in steel bridges | 12,896 images with 64 × 64 pixels of cracks and the same number of non-cracks |
| Liu and Zhang [192] | Image-driven low cycle fatigue-induced damage identification for post-hazard inspection | 8259 images with 224 × 224 pixels extracted from a the video was taken during the experimental test |
| Ni et al. [198] | Concrete thin crack identification and width measurement | 65,319 crack and 64,681 non-crack 224 × 224 RGB images for GoogleNet and 60,000 images for ResNet |
| Hoskere et al. [140] | Rapid and autonomous post-earthquake inspections including identification of damage presence and damage type | A set of 665 images with 288 × 288 pixels containing post-earthquake damage scenarios such as concrete cracks, spalling and exposed rebar |
| Chen [113] | Inspection of nuclear power plants and detection of cracks in video frames | A total 147,344 crack and 149,460 non-crack 120 × 120 image patches |
| Liang [143] | Post-disaster system-level failure analysis of bridges, the structural component-level identification, and local-level damage localization | 492 number of 224 × 224 RGB images |
| Zhao et al. [202] | Classification the types of bridges, recognition of bridge components and crack detection | 3832 RGB images of an arch, suspension and cable-stayed bridges with 227 × 227 pixel resolution and 60,000 intact and cracked concrete RGB images with 224 × 224 pixel resolution |
| Gao et al. [142,212] | Component type, spalling condition, damage level, and damage type determination. | 2000 images with a size of 224 × 224 RGB (Structural ImageNet) |
| Dorafshan et al. [203] | Autonomous inspection of concrete structures using Unmanned Aerial Systems (UASs) | 9011 227 × 227 pixel images of lab-made bridge decks including 1471 cracked and 7540 intact cases taken by Nikon camera |
| Suh and Cha [204] | Damage type detection and localization | 2366 images of concrete cracks, steel delimitation, corrosion, and bolt loosening with a size of 500 × 375 pixel |
| Wang et al. [196] | Damage type identification (intact, crack, efflorescence, and spall) and localization for masonry historic structures | 5145 stretcher and header brick images with 480 × 105 and 210 × 105 pixel resolutions respectively |
| Kim et al. [72] | Determining the existence and location of cracks from surface images considering crack-like noise patterns | 3186 images crack and intact surfaces with different distances between the camera and 227 × 227 pixel |
| Silva et al. [213] | Automated inspection of concrete structures and crack detection | 3500 sample of concrete surface images of 256 × 256 pixels with and without cracks |
| Dorafshan et al. [96] | Image-based crack detection in concrete structures | 18,000 concrete panel images with the size of 256 × 256 pixel simulating reinforced concrete bridge decks |
| Sharma et al. [214] | Image-based detection of the crack presence | 15,600 crack and non-crack 28 × 28 RGB image patches |
| Li and Zhao [169] | Crack detection of concrete surfaces | real concrete surface RGB images with 224 × 224 pixel resolution and taken by a smartphone |
| Kang and Cha [14] | Autonomous UAV method using ultrasonic beacons for damage detection and localization | 40,000 cracked and intact concrete surface images with 256 × 256 pixel |
| Yang et al. [101] | Semantically identification and pixel-wise segmentation | A collection of 800 images of various cracks with 224 × 224 pixel |
| Kim and Cho [122] | Crack detection on concrete surfaces | 7195 images of cracks, joints, edges, plants, and intact surfaces with 227 × 227 pixel scraped from the Internet |
| Beckman et al. [205] | Volumetric damage detection and quantification | 444 images of concrete spalling with the resolution of 853 × 1440 pixels |
| Kumar et al. [215] | Automated CCTV inspection of sewer pipelines | 12,000 images of cracks, root intrusions, deposits, and in pipelines with the dimension of 256 × 256 |
| Narazaki et al. [144,190,199] | Structural bridge components recognition | 39,081 images of a concrete girder bridge with a size of 240 × 320 |
| Karaaslan et al. [186] | Mixed reality inspection including detection and segmentation of cracks and spalls | 51,300 concrete crack, road damage and bridge inspection images with the size of 300 × 300 |
| Oliveira et al. [216] | Damage classification in an aluminum plate | 720 frames of 128 × 128 greyscale representation of electromechanical impedance |
| Li et al. [217] | Concrete bridge inspection and estimating the probability of being cracked | 326,000 samples of 18 × 18 one channel greyscale patches of concrete cracks and non-cracks |
| An et al. [124] | Autonomous detection of macro- and micro-cracks | A set of 20,000 images of crack and intact images 227 × 227 RGB images |
| Duarte et al. [163] | Building damage (rubble piles, debris) classification and assessment from images such as | A total of 12,973 of the satellite and airborne 224 × 224 pixel images |
| Ji et al. [218] | Identification of collapsed buildings from post-event satellite images | 613 collapsed and 1857 non-collapsed buildings Post-Earthquake Satellite images with the resolution of 96 × 96 |
| Kang and Cha [159] | Intact and cracked concrete area classification | A broad variation of 2304 × 1280 raw images of concrete surfaces |
| Modarres et al. [219] | Crack detection of concrete bridges and composite panels | 2400 number of real concrete crack and intact surfaces and 6000 debonded and intact sandwich panels with a resolution of 96 × 96 pixel |
| Yeum et al. [141] | Classification and localization for visual assessment of connections in a full-scale truss structure | 100,000 images of welded joints with a dimension of 256 × 256 |
| Hoskere et al. [139] | Damage localization and classification for post-earthquake structural assessment | 1695 images of concrete spalling, exposed rebar, steel corrosion, concrete cracks, fatigue cracks and asphalt cracks with a resolution of 288 × 288 |
| Nazaraki et al. [191] | Pixel-wise bridge component recognition | 11,897 urban, bridge and general 180 × 180 images |
| Atha and Jahanshahi [31] | Assessment and corrosion detection on metallic surfaces | 67,187 images of regions with and without corrosions with 128 × 128 pixel resolution |
| Cha et al. [25] | Automatic concrete crack detection | 40,000 images of cracks on concrete images with a dimension of 256 × 256 pixel |
| Framework | Core Programming Language | Interface Support | CNN and RNN Support |
|---|---|---|---|
| TensorFlow | Python, C++, Cuda | Python, C/C++, Java | Yes |
| Torch/PyTorch | C, Lua | Python, C/C++, Lua | Yes |
| Keras | Python | Python, Matlab | Yes |
| Caffe | C++ | Python, Matlab | Yes |
| Theano | Python | Python | Yes |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Azimi, M.; Eslamlou, A.D.; Pekcan, G. Data-Driven Structural Health Monitoring and Damage Detection through Deep Learning: State-of-the-Art Review. Sensors 2020, 20, 2778. https://doi.org/10.3390/s20102778
Azimi M, Eslamlou AD, Pekcan G. Data-Driven Structural Health Monitoring and Damage Detection through Deep Learning: State-of-the-Art Review. Sensors. 2020; 20(10):2778. https://doi.org/10.3390/s20102778
Chicago/Turabian StyleAzimi, Mohsen, Armin Dadras Eslamlou, and Gokhan Pekcan. 2020. "Data-Driven Structural Health Monitoring and Damage Detection through Deep Learning: State-of-the-Art Review" Sensors 20, no. 10: 2778. https://doi.org/10.3390/s20102778
APA StyleAzimi, M., Eslamlou, A. D., & Pekcan, G. (2020). Data-Driven Structural Health Monitoring and Damage Detection through Deep Learning: State-of-the-Art Review. Sensors, 20(10), 2778. https://doi.org/10.3390/s20102778