1. Introduction
On 15 December 2016, with 18 satellites in orbit, Europe’s satellite navigation system Galileo was declared operational and started offering its initial services to public authorities, businesses and citizens. When Galileo is fully operational, the constellation will consist of 24 satellites plus spares in Medium Earth Orbit (MEO) at an altitude of 23,222 km. Eight active satellites will occupy each of three orbital planes inclined at an angle of 56 to the equator. The satellites will be spread evenly around each plane and will take about 14 h to orbit the Earth. Two further satellites in each plane will be a spare on standby should any operational satellite fail.
Currently, (February 2019), Galileo is in its full operational capability (FOC) phase; 22 FOC satellites were launched up to the start of 2019 in addition to the four IOV launched between 2011 and 2012. The navigation signals of these satellites are transmitted on five frequencies: E1, E5a, E5b, E5 and E6. Only three IOV satellites are operational because E20 has been declared unavailable since 27 May 2014 [
1] when a power anomaly led E5 and E6 signals to a permanent loss of power. After this failure, all IOV satellites are backed-off and thus their signals have less transmitted power than the FOC satellites. Nineteen FOC satellites are declared operational, one (E22) was removed from active service in December 2017 for constellation management purposes, while the first two FOC satellites, Milena (E14) and Doresa (E18), result under test. These two satellites were launched on 22 August 2014 at 09:27 local time in French Guiana by a Soyuz ST rocket. The two satellites were left in a non-nominal highly elliptical orbit characterized by an apogee of 25,900 km and a perigee of 13,713 km, with an inclination with respect to the equator of 49.69
instead of planned circular medium-Earth orbits at an altitude of 23,222 km with an inclination of 55.04
. The wrong injection orbits made the two satellites not usable for navigation mission, thus ESA planned a salvaged mission to make the two satellites usable [
2,
3]. From November 2014 to February 2015, the satellites made a series of maneuvers to raise the low point of their orbits by 3500 km and make their orbits more circular. Satellites in new orbits overfly the same location on the ground every 20 days. This is different from the nominal Galileo repeat pattern of 10 days, but makes possible a synchronization of theirs ground track with the rest of the Galileo constellation. Thus, the revised orbit (reported in
Table 1) allowed ESA to switched on satellite’s navigation payload. On 5 August 2016, beginning 00:00 UTC, GSAT0201 named Doresa (E18) and GSAT0202 named Milena (E14) started broadcasting navigation message for testing purposes. (For details, see notice advisory to Galileo users
https://www.gsc-europa.eu/notice-advisory-to-galileo-users-nagu-2016030).
At the end of the mission, the European Space Agency on 8 October 2016 requested to provide feedback on usage of these satellites (
http://galileognss.eu/tag/sat-6/). After the ESA request, Sosnica et al. [
4] in 2016 analyzed the accuracy of the Galileo system orbits including Milena (E14) and Doresa (E18) satellites, focusing on the precise orbits. Giorgi et al. [
5] tested the general relativity studying the relativistic offset (redshift and Doppler shift) by using data provided by E18 Galileo satellite signals. In 2018, Paziewski et al. [
6] investigated the potential use of Milena (E14) and Doresa (E18) satellites for positioning purposes. They evaluated the applicability of the Milena (E14) and Doresa (E18) satellites to precise GNSS positioning focusing on relative kinematic positioning as an instantaneous solution in multi-baseline mode. Robustelli and Pugliano [
7] analyzed the code multipath error of GNSS satellites by using the short time Fourier transform and Wavelet analysis [
8], showing that multipath performance of Milena (E14) and Doresa (E18) satellites are the same as the other Galileo FOC satellites when a mobile phone is used as receiver [
9]. In 2018, Nicolini and Caporali [
10] analyzed Milena (E14) and Doresa (E18) satellites’ orbits during Week 1950 from 21 May 2017 to 27 May 2017. The Galileo system is constantly evolving and the dataset analyzed by Nicolini and Caporali does not fully cover the ground track of the satellites, thus a re-evaluation is justified. Moreover, they considered a period of validity of the Galileo ephemeris equal to 1 h, less than that fixed by the ESA of 4 h.
GNSS errors can be divided into errors that can be corrected by using differential techniques or not. The multipath error belongs to first group [
11] while the ephemeris error to the second. GNSS satellites travel in precise and well known orbits. Unfortunately, the orbits have slight variations that lead to significant errors in the calculated positions. For these reasons, the GNSS ground control system continually monitors the satellite orbit. In the event that the orbit of a satellite changes, the ground control system sends a message to the satellite through which the content of the broadcast ephemeris is updated. However, even with the corrections from the GNSS ground control system, there are still small errors in the orbit that can result in up to ±2.5 m of position error [
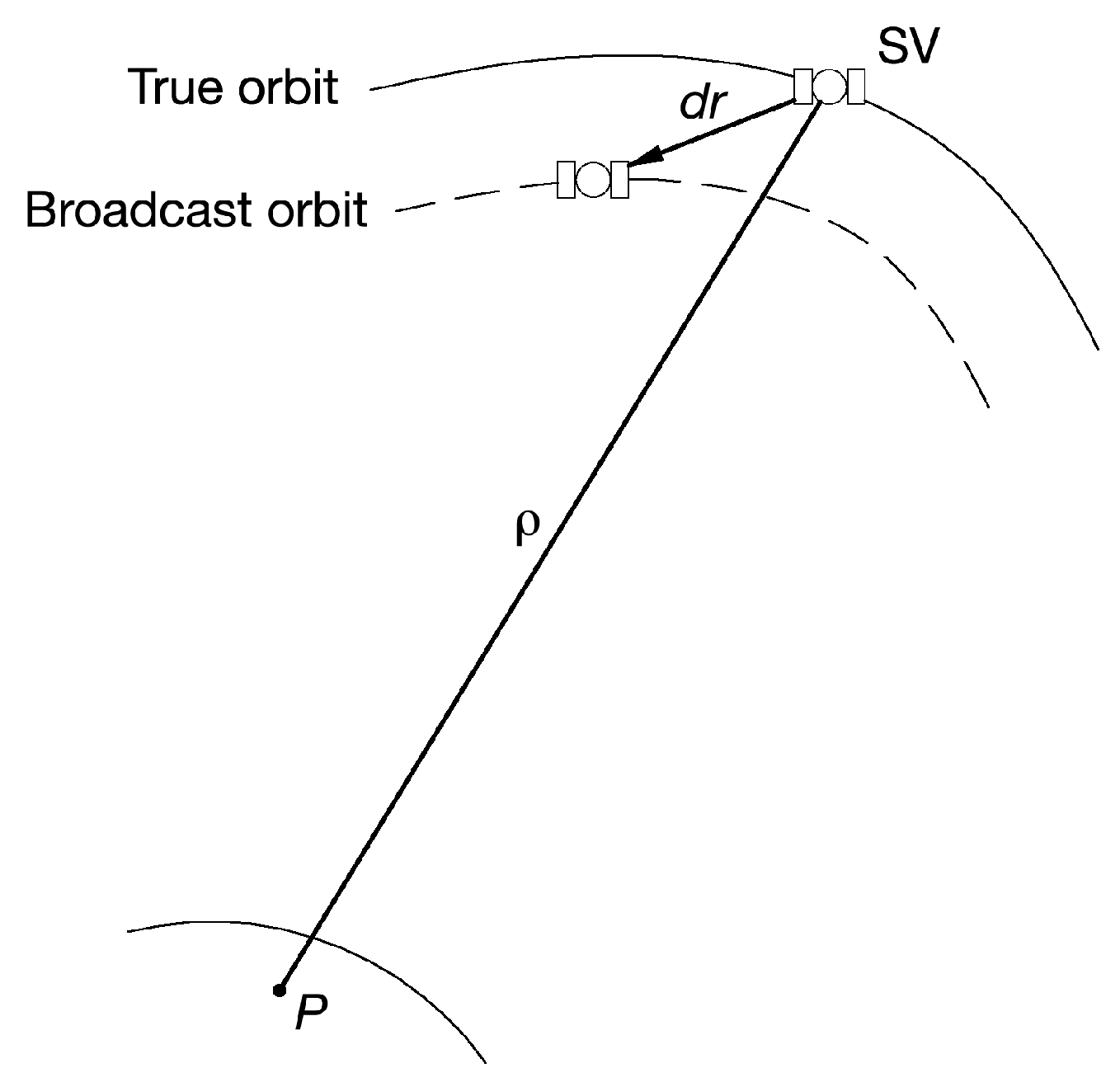
12]. The ephemeris errors are the differences between the true satellite position and the position computed using the GNSS navigation message. The radial residual satellite position error (
dr) is a vector that is depicted in
Figure 1 where
represents the pseudorange measurement and
P the point where receiver is located. The typical magnitudes of ephemeris error is in the range of 1–6 m [
13]. To make the Milena (E14) and Doresa (E18) satellites usable, it is necessary that the broadcast ephemeris must have an accuracy comparable to that of the other Galileo satellites. Actually, it is very important to have two additional satellites available since currently Galileo system is not yet fully operational and the accuracy in the position increases as the number of visible satellites increases. We are focusing our attention on the broadcast ephemeris because they are the only ones that can be used in real time for single point positioning, a lack of accuracy on them will directly impact the accuracy of Galileo positioning. For this reason, the evaluation of the accuracy of the ephemeris broadcasted by the Milena (E14) and Doresa (E18) satellites is of fundamental importance and is the main purpose of this paper. In a first analysis conducted by the authors [
14], the position error between the broadcast orbit and the IGS precise orbit was determined for each second for the period starting from 21 February (DOY 52) to 12 March (DOY 71) of 2018 by using ephemeris decoded by receiver located YEL2 station. The analysis showed that the orbits of the satellites Milena (E14) and Doresa (E18) are affected by an error comparable to that of the other Galileo satellites with the exception of DOY 62 during which two anomalies were found. The two anomalies were located in the time range between 528,000 and 531,000 s and between 556,000 and 559,000 s for Milena (E14) and Doresa (E18) satellites, respectively.
This study investigated these anomalies by comparing the position of each Galileo satellite obtained by MGEX multi-GNSS broadcast ephemeris (BRDM) with precise orbit every second for the above mentioned dataset and for an additional twenty-day dataset from 21 June 2018 (DOY 172) to 10 July 2018 (DOY 191). The BRDM ephemeris are different from received one: they are generated by Technische Universitat Munchen (TUM) and DLR by merging real-time streams of a number of selected MGEX stations. For the first period (DOY 52–71), two different types of transmitted ephemerides were used: those received by the receiver placed in IGS YEL2 station located in Canada and the BRDM ones. During the first period, 16 satellites were working while during the second there were 19 satellites.
3. Results
The results relating to the first dataset have already been discussed in [
14], and constitute a subset of the results obtained by processing the second dataset. Therefore, in this section, we report only the results obtained by analyzing the second and third datasets.
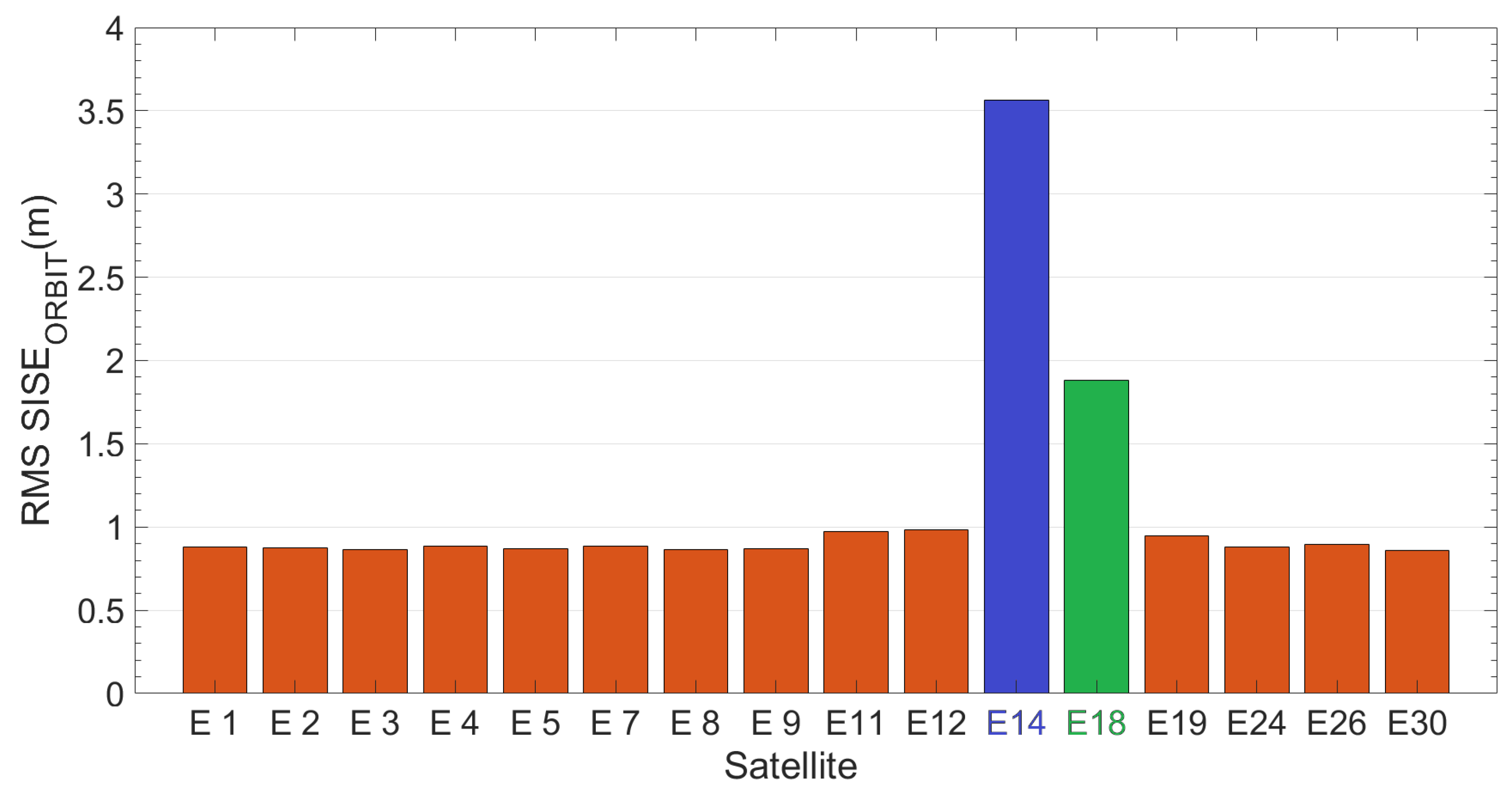
Figure 3 reports Root-Mean-Square value of SISE
orbit calculated using an ephemeris validity time of 14,400 s (4 h) for each satellite. RMS has been calculated over time range of 20 days (DOYs 52–71). Milena (E14) and Doresa (E18) satellites (represented in figure in blue and green respectively) show a RMS of 3.56 and 1.88 m, respectively, which is four and two times the RMS shown by the other satellites (about 0.90 m).
The time evolution of the SISEorbit, radial, cross and along components of the two satellites are analyzed and compared with that of a satellite (E1) used as representative of all the others.
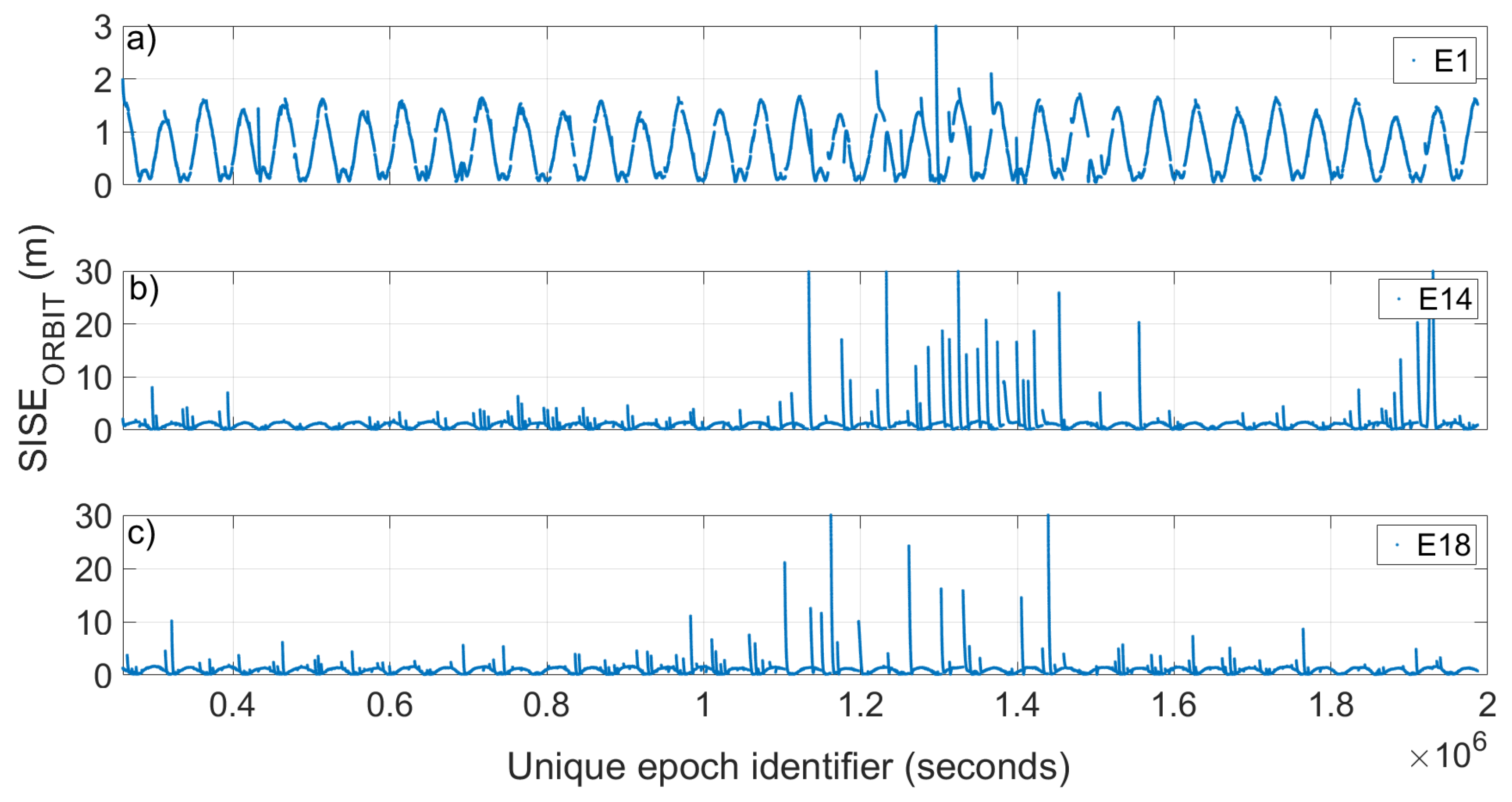
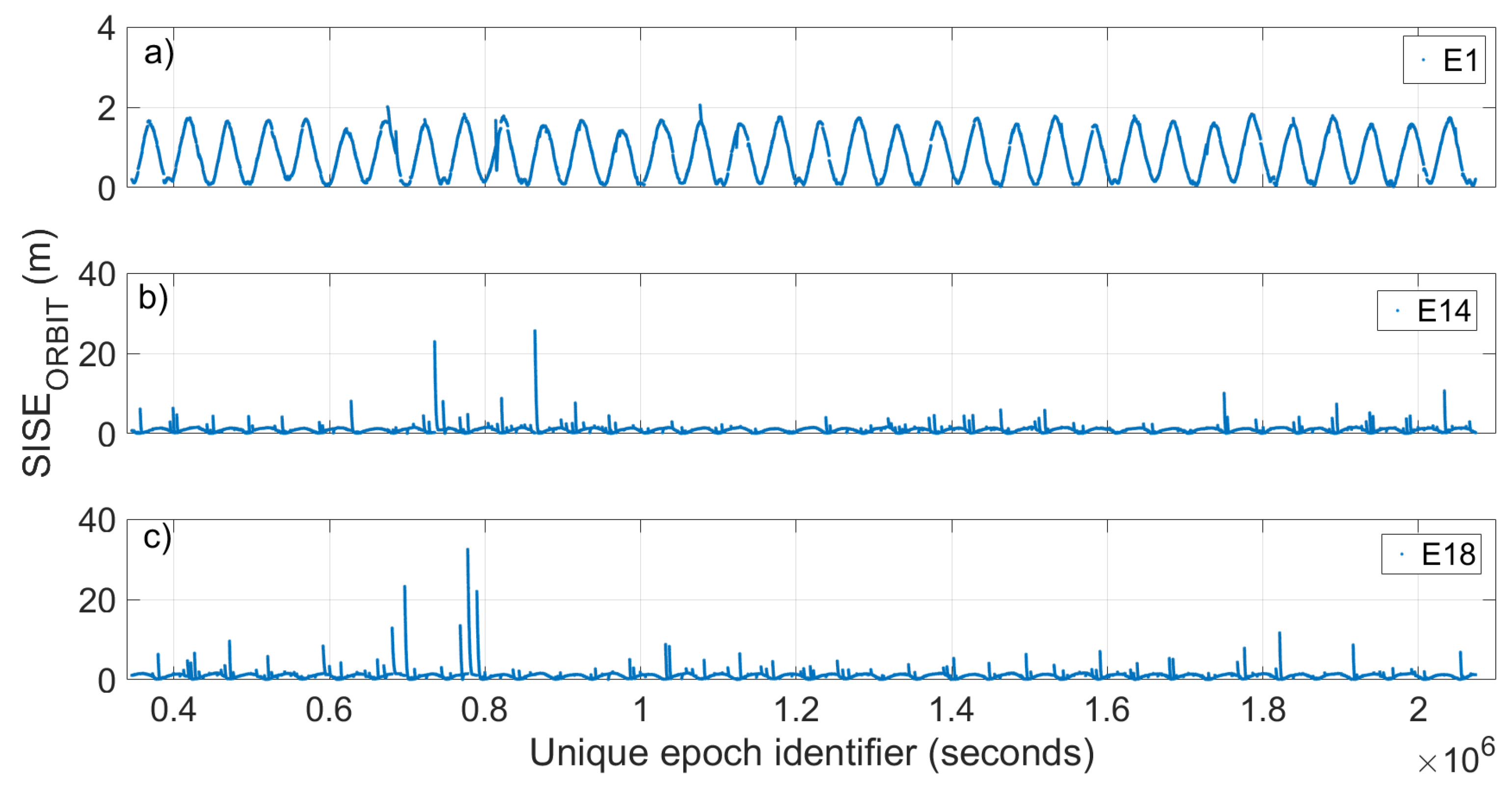
Figure 4 shows the evolution of the SISE
orbit calculated with a period of validity of the ephemeris of 14,400 s (4 h) with respect to time for the satellites E1, Milena (E14) and Doresa (E18) reported in
Figure 4a–c, respectively. Since 20 days of data are represented, it was not possible to use the Galileo epoch as univocal epoch because it is reset every new week. Thus, we used an epoch obtained by adding to its representation in Galileo time a number of seconds that takes into account the change of week. The E1 satellite was chosen as representative of all other Galileo satellites because they show very similar behaviour towards the orbit error.
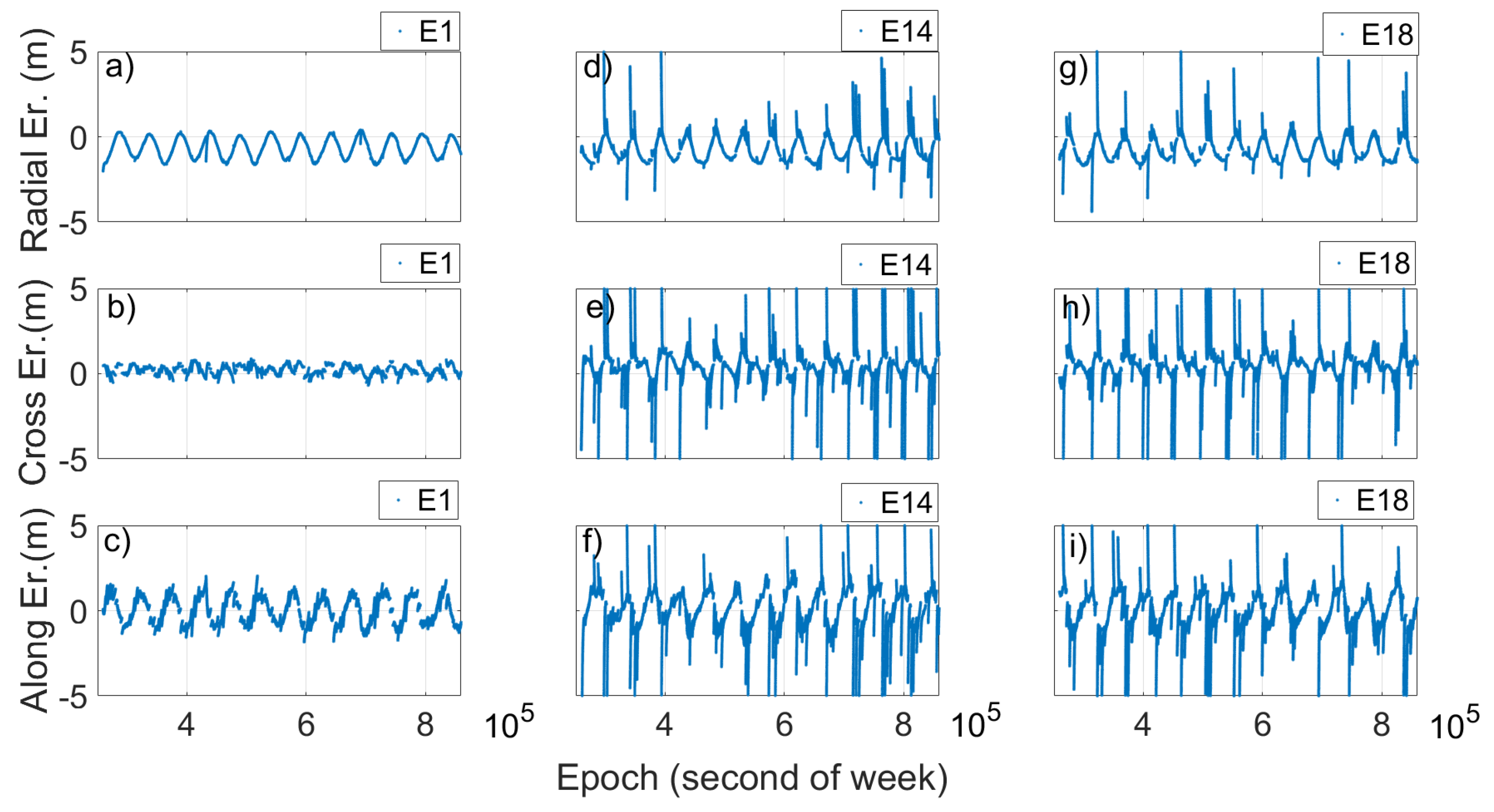
Figure 5 reports the radial, cross and along error components.
Looking at
Figure 4 and
Figure 5, two things are evident. The first is the extreme variation shown by SISE
orbit in the case of the Milena (E14) and Doresa (E18) satellites; the second is related to the clear periodicity that the SISE
orbit and error components show for all three satellites. Actually,
Figure 4b,c shows a SISE
orbit up to 30 m, well below the real value, i.e. 236.1 and 49.5 m, respectively.
Figure 5d–i shows zoomed in images to achieve a better readability. The maximum errors obtained are 7.8, 32.76, 11.34, 9.53, 29.08, and 12.24 m in
Figure 5d–i, respectively.
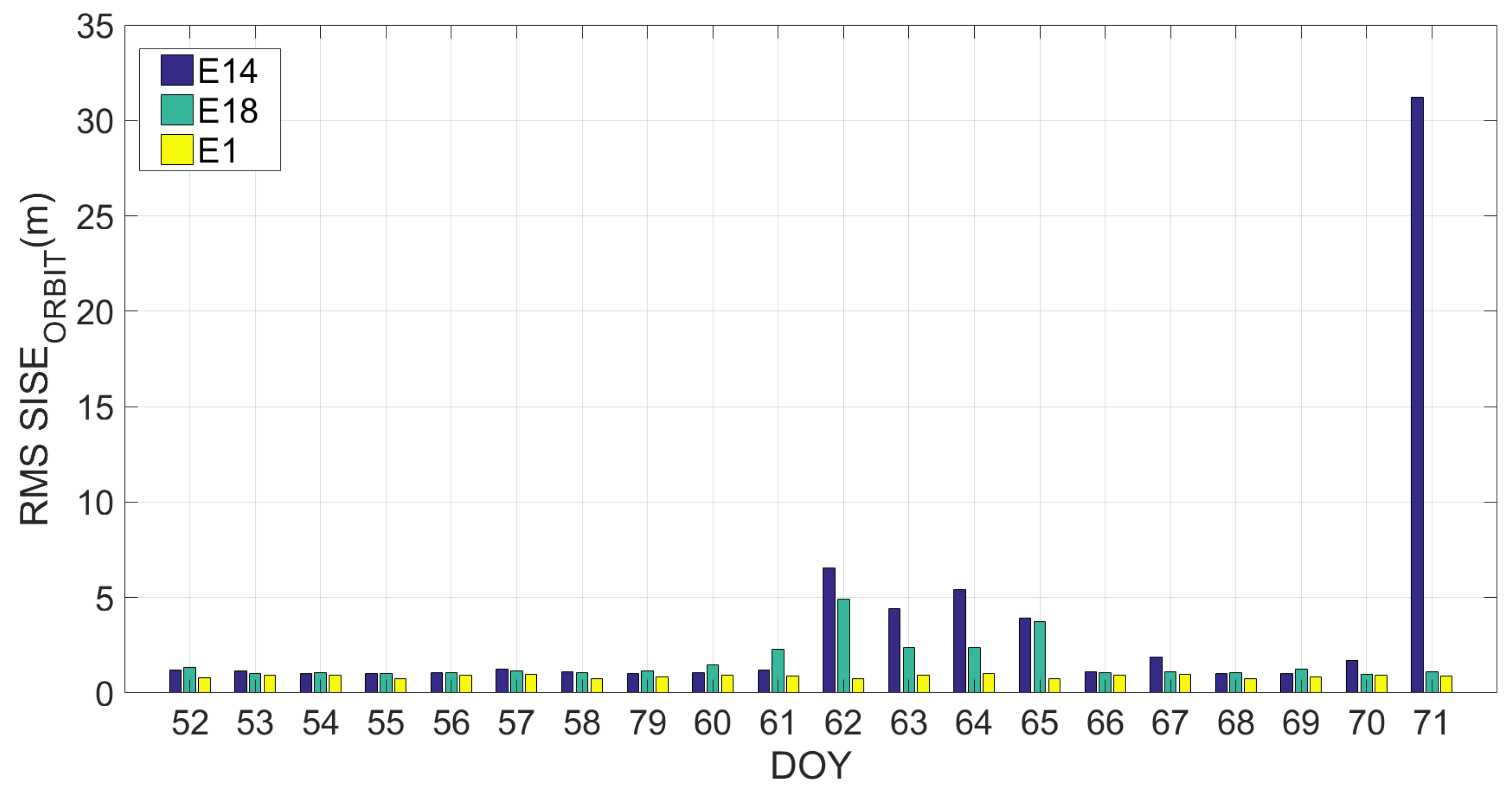
Figure 4 shows how the SISE
orbit varies with time. In particular, it can be noted that in some days it is very high while in others it is lower; therefore, instead of calculating an RMS of the SISE
orbit on the twenty days, a daily RMS was calculated, as reported in
Figure 6. The figure shows clearly how the Milena (E14) and Doresa (E18) satellites have a higher SISE
orbit compared to the other satellites, with very high discrepancies on DOYs 61–65 and 71.
The same analysis was conducted on the third dataset. Results are reported in the
Figure 7,
Figure 8 and
Figure 9.
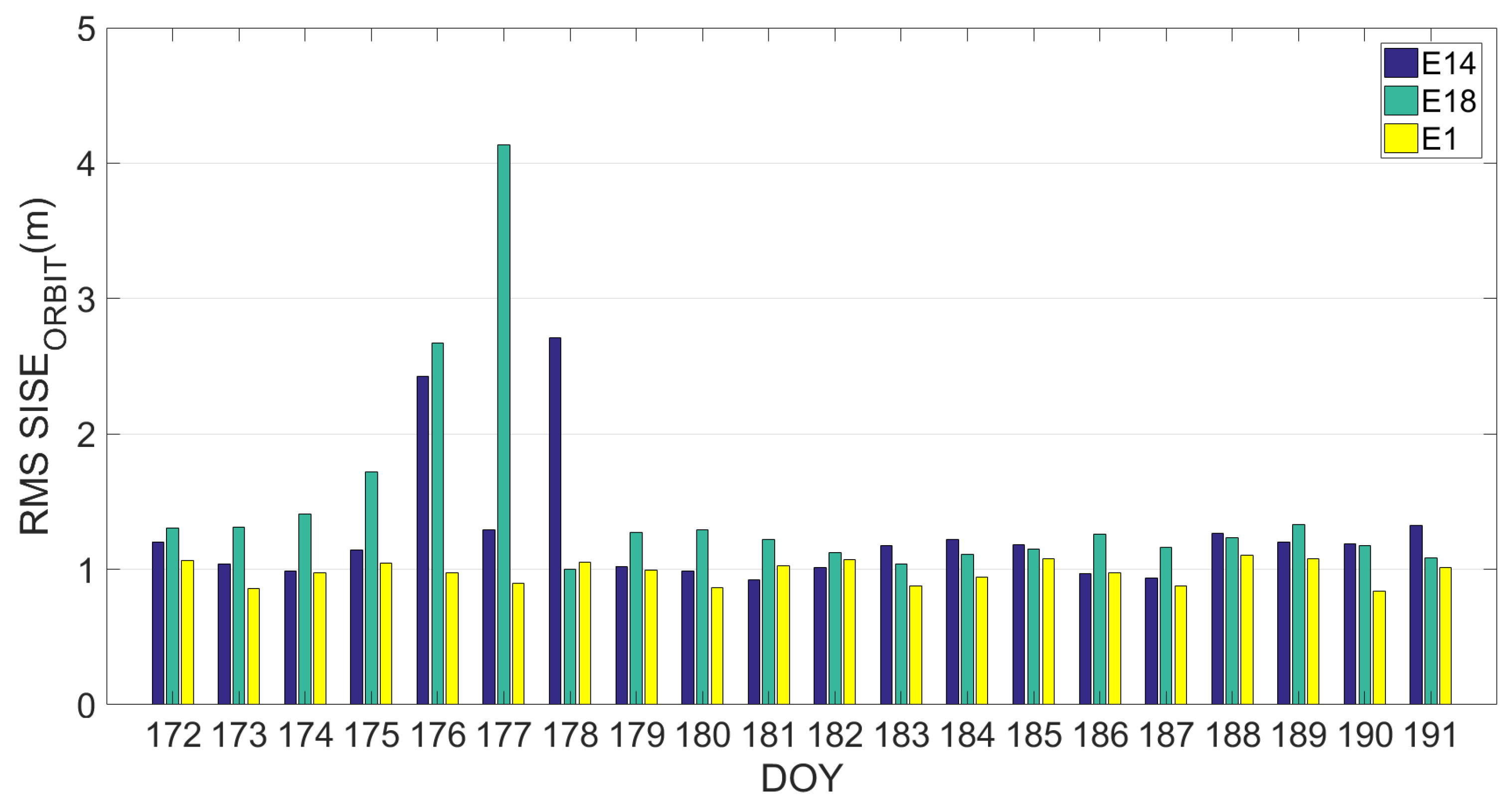
Figure 7 depicts the RMS value of SISE
orbit calculated using an ephemeris validity time of 14,400 s (4 h) for each satellite.
Figure 8 shows the evolution of the SISE
orbit with respect to time for the satellites E1, Milena (E14) and Doresa (E18) reported in
Figure 8a–c, respectively, while
Figure 9 depicts the Daily RMS SISE
orbit for satellite Milena (E14) and Doresa (E18) compared with satellite E1.
If we compare
Figure 3 and
Figure 7, we see an improvement in SISE
orbit: for satellite Milena (E14) the RMS is reduced from 3.56 to 1.12 m while for the Doresa (E18) satellite it decreases from 1.88 to 1.43 m. This improvement is also confirmed by what is shown in
Figure 8 and
Figure 9, nevertheless the SISE
orbit for the two satellites under analysis continues to be higher than that of the other Galileo satellites. Thus, this behaviour cannot have been caused by an anomaly because both analyzed datasets highlight it.
The validity time is a parameter that can be changed. Its reduction means using Keplerian parameter closer to the reference epoch and therefore the orbit error described by SISEorbit decreases. However, the reduction of the validity time has a negative effect, as it will increase the number of epochs for which the parameters of the ephemeris will be too old, thus the satellite to which those parameters refer will be discarded in the navigation solution.
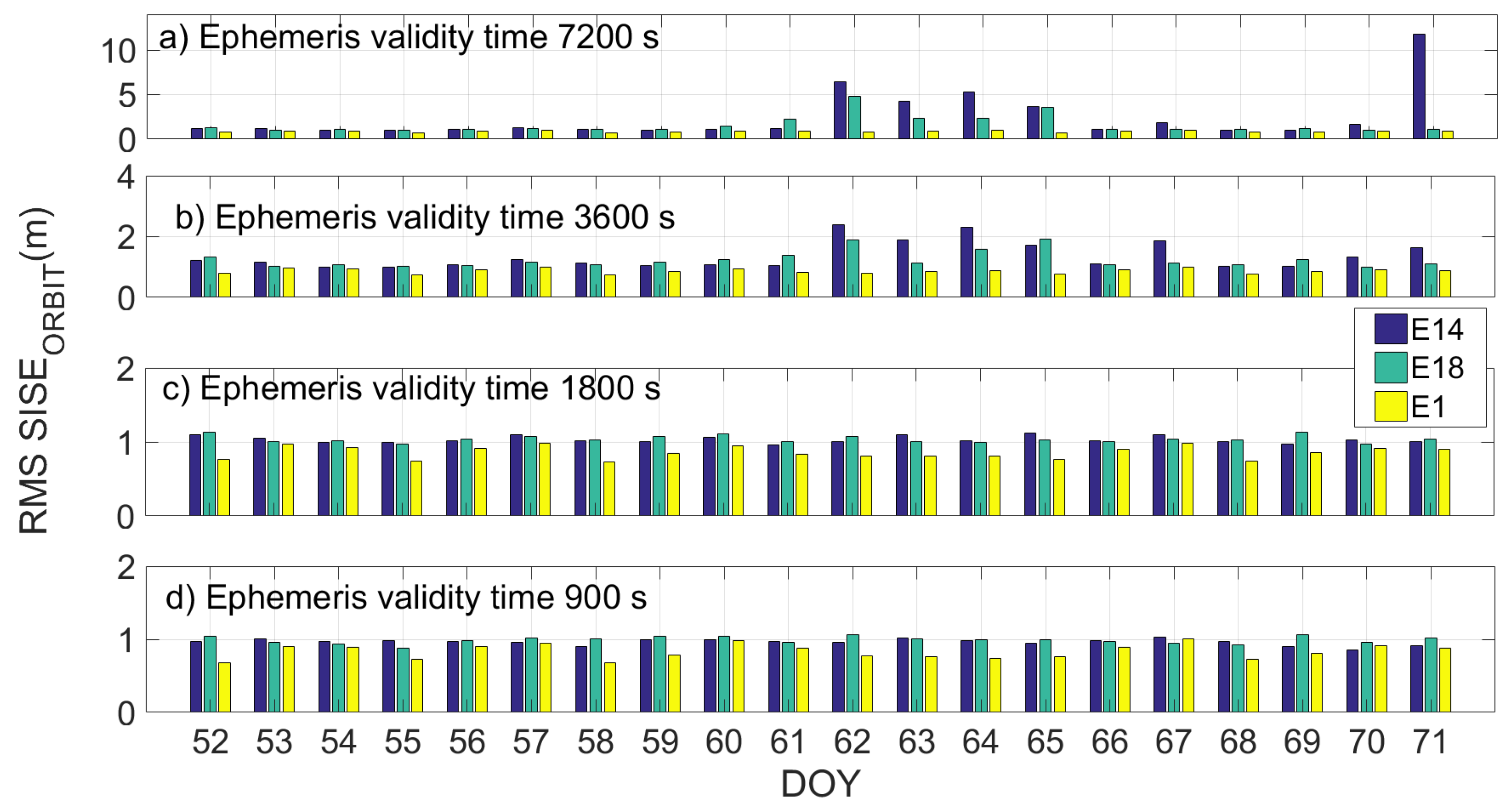
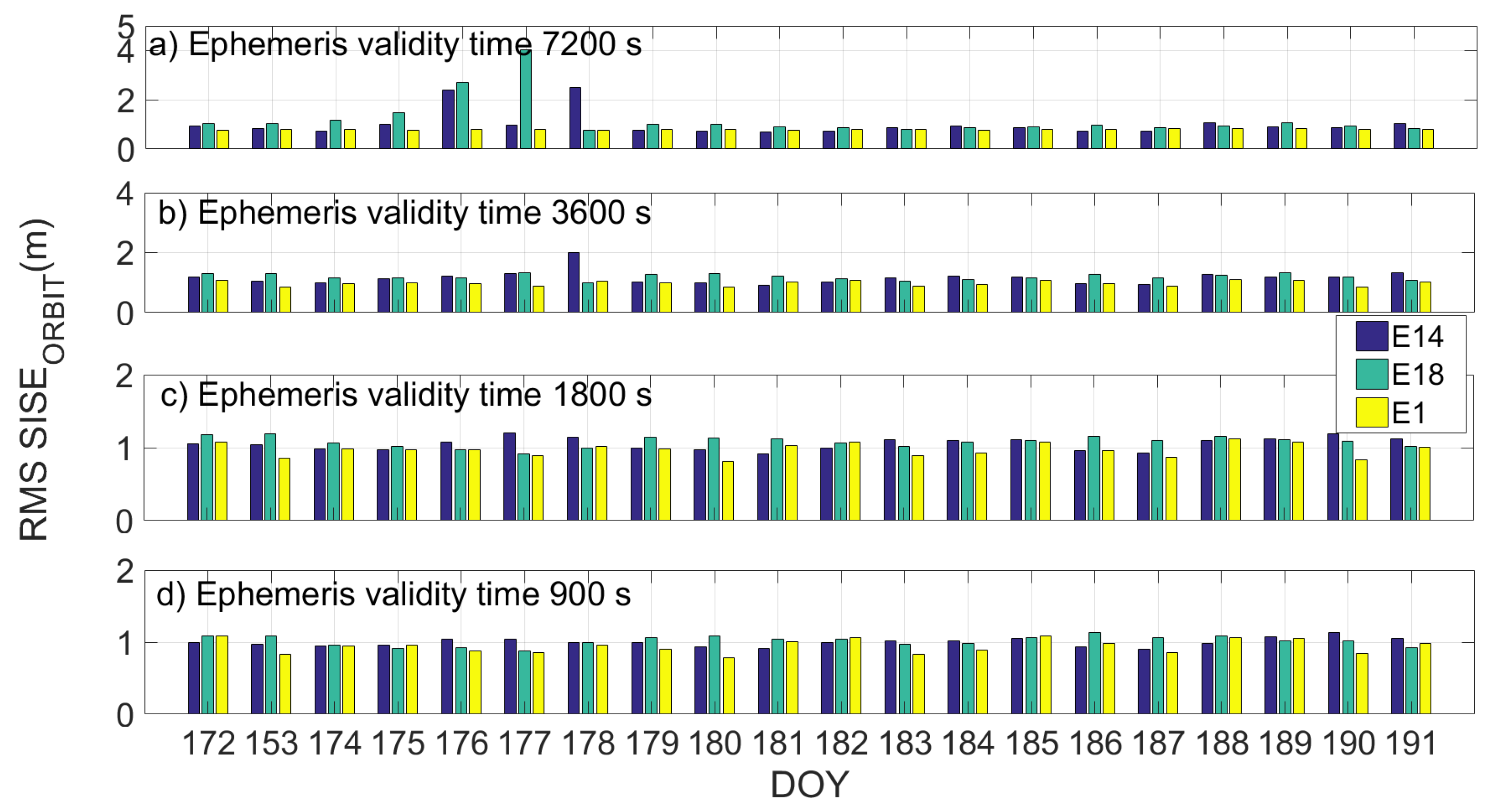
Figure 10 and
Figure 11 show the daily RMS SISE
orbit calculated by using a validity time of 7200 s, 3600 s, 1800 s and 900 s in
Figure 10a–d and
Figure 11a–d, respectively, for the two different datasets. Milena (E14) satellite is represented by the blue bar, Doresa (E18) by the green one and satellite 1 (E1) represented by the yellow one. In the figures, it is evident how setting the ephemeris validity time equal to 1800 allows obtaining a SISE
orbit comparable with that of the other satellites.
The reduction in validity time has a positive effect on the Milena (E14) and Doresa (E18) satellites; observing the days with the higher RMS (DOYs 61–65, 71, and 175–178), we can see how this value decreases when the validity time decreases. This effect does not occur on the other satellites for which the improvement of the SISEorbit with the diminution of the validity time is negligible. If a validity time of 1800 or 900 s is used, Milena (E14) and Doresa (E18) reach a SISEorbit RMS of about 1 m comparable to that of the other Galileo satellites.
Table 4 reports SISE
orbit RMS value calculated on days with the higher RMS (DOYs 61–65, 71, and 175–178) using the six validity time thresholds.
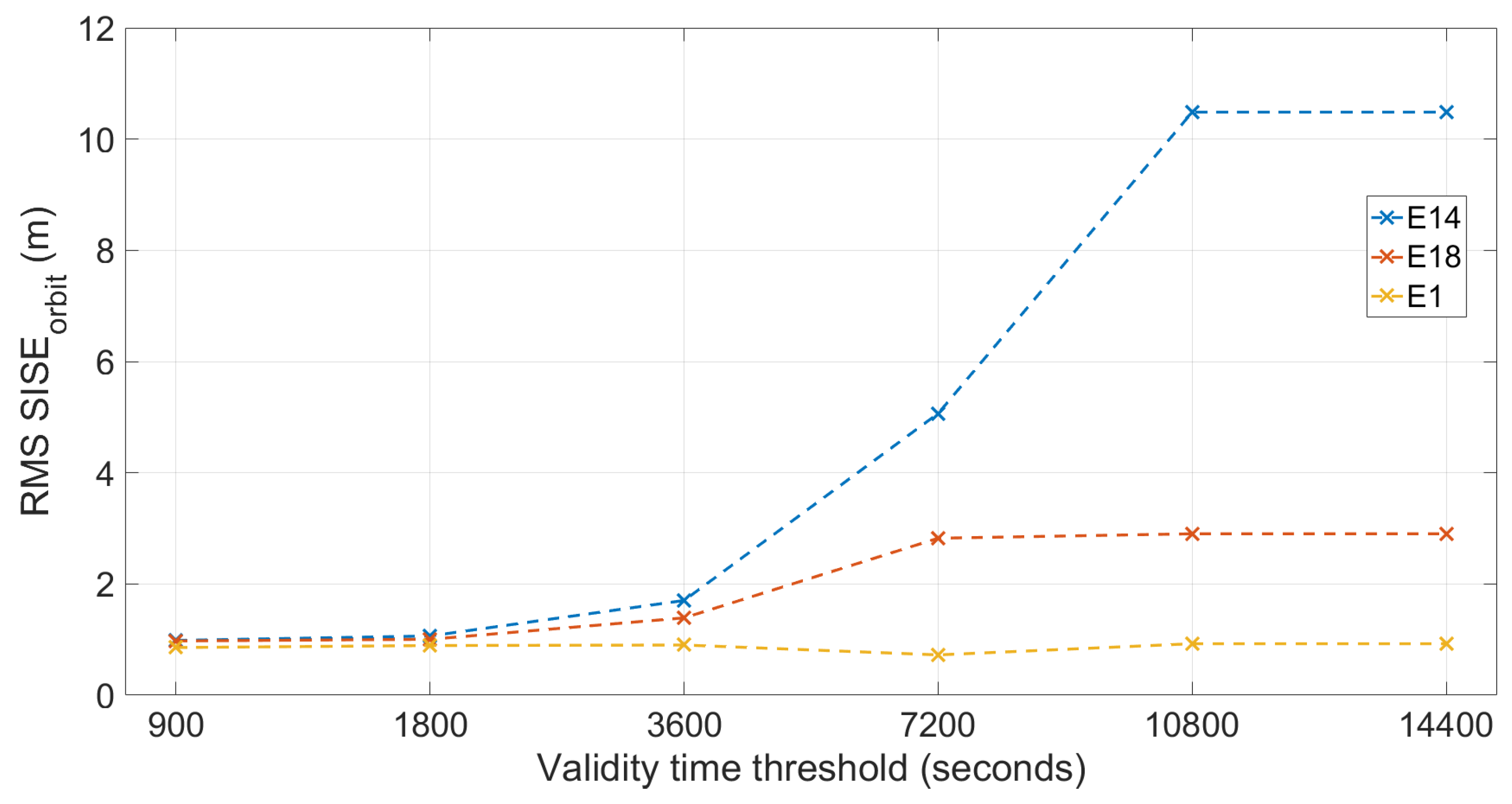
Figure 12 shows the RMS SISE
orbit calculated on DOYs showing higher errors (DOYs 61–65, 71, and 175–178) plotted versus the six different validity time thresholds (values are reported in
Table 4). By observing
Figure 12, it can be seen that: the SISE of the satellite E1 does not change when the threshold used changes; for all three satellites, the errors with the threshold set at 14,400 s are identical to those obtained with the threshold set at 10,800 s, the errors of the Milena (E14) and Doresa (E18) satellites become comparable with those of the E1 satellite starting from the threshold of 3600 s; these errors become very similar when the thresholds are set at 1800 and 900 s. It should be highlighted that the use of such a low validity time has the consequence of discarding a certain number of epochs for which the validity of the message is below the threshold considered. This loss is calculated, as shown in
Table 5 and
Table 6 for the second and the third datasets, respectively.
Looking at the tables, we can see that the use of a threshold equal to 1800 s for validity time implies a loss of epochs equal to about 16% for Milena (E14) and about 11% for Doresa (E18) in the second analyzed dataset. Considering the third dataset, the discarded epochs decrease, passing to 5.78% for Milena (E14) and 8.3% for Doresa (E18). If a validity time of 900 s is used, the discarded epochs are about the 30% of the total. This led us to prefer a validity time of 1800 s compared to one of 900, since a small improvement in the error corresponds to a high reduction in usable periods. Therefore, considering a validity time of 1800 s, we could obtain a SISE
orbit comparable to that of the other satellites, but having to renounce the use of the two satellites in a number of epochs that is less than 8% in percentage terms. A validity time of 1800 s probably is better than one of 900 s because, by using the last one (as reported in
Table 5 and
Table 6), a higher number of epochs will be lost.
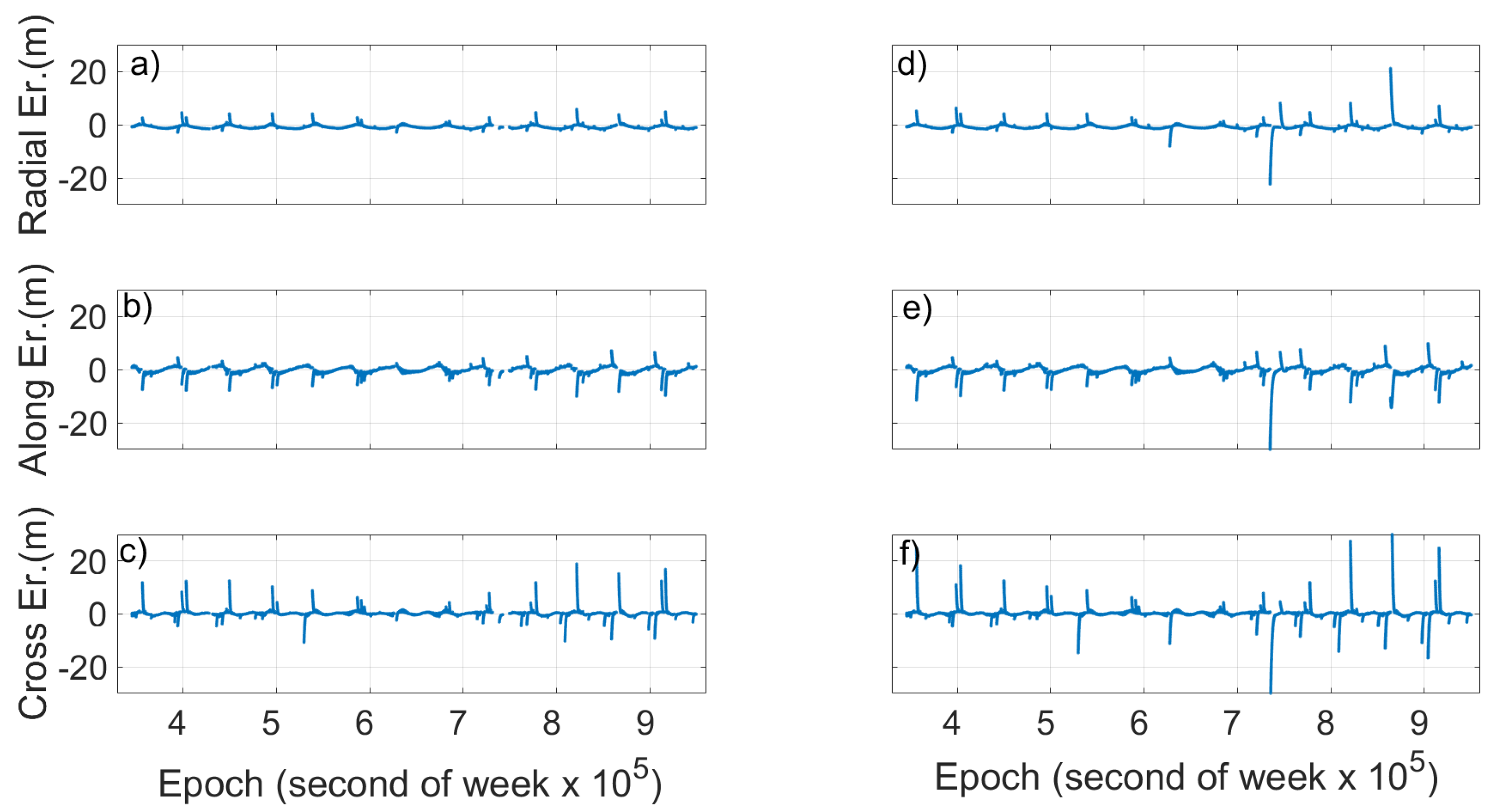
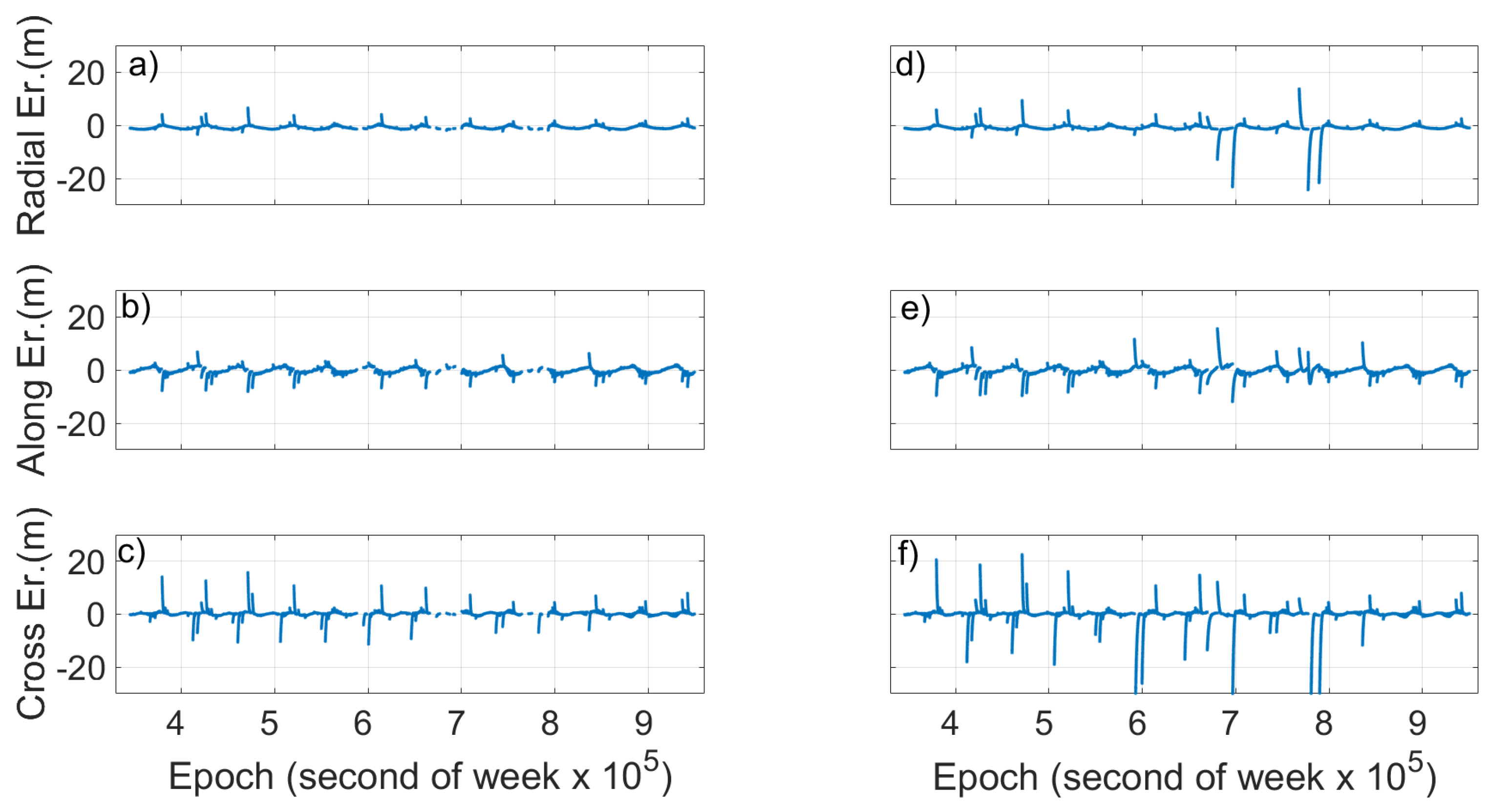
Figure 13 and
Figure 14 show the radial, cross and along errors calculated with the validity time threshold set at 1800 s (
Figure 13 and
Figure 14, left) and 10,800 s (
Figure 13 and
Figure 14, right) of Milena (E14) and Doresa (E18) satellites, respectively, for the second dataset of DOYs 172–191. By observing the two figures, an improvement of all three components can be noted when the validity time threshold is set at 1800 s. The radial component of a satellite’s ephemeris error is normally the smallest; however, it has the largest impact on the user’s calculated position. Along-track and cross-track components are larger than the radial component by an order of magnitude but have little impact of the resultant user position error [
17]. Therefore, the improvement obtained using a threshold of 1800 s as validity time of ephemeris should allow us to be able to use the satellites under analysis as an augmentation to the navigational solution.
4. Discussion
The position error between the broadcast orbit and the IGS precise orbit was determined for each Galileo satellite every second using six different validity time ephemeris thresholds (14,400 s, 10,800 s, 7200 s, 3600 s, 1800 s, and 900 s) for two periods: the first starts on 21 February 2018 (DOY 52) and ends on 12 March 2018 (DOY 71), the second starts on 21 June 2018 (DOY 172) and ends on 10 July 2018 (DOY 191) by using IGS products. For the first period (DOYs 52–71), two different types of transmitted ephemeris were used: those received by the receiver located in IGS YEL2 station located in Canada and the brdm ones. During the first period, 16 satellites were working while during the second the satellites were 19, thus more than 2.2 × 108 records were processed.
The analysis conducted show that Milena (E14) and Doresa (E18) satellites have a higher SISEorbit than the other satellites of the Galileo constellation for all three datasets analyzed. Using a synthetic indicator such as the RMS calculated on the entire dataset the Milena (E14) satellite shows a RMS SISEorbit equal to 3.56 m for the second dataset and of 1.12 m for the third dataset, while the Doresa (E18) satellite shows an RMS equal to 1.88 and 1.43 m for the same datasets. If the RMS calculation is done on a daily basis, the Milena (E14) and Doresa (E18) satellites have a higher RMS error with respect to the other satellites showing very high peaks in well-defined days (DOYs 61–65, 71, and 175–178).
Analyzing the temporal evolution of SISE
orbit, we can see how Milena (E14) and Doresa (E18) satellites show discontinuities and very high peaks compared with those of the other Galileo satellites. Despite these differences, the SISE
orbit of Milena (E14) and Doresa (E18) satellites show the same periodicity of 13.9 h showed by the SISE
orbit of the other satellites, comparable with that was found by Nicolini and Caporali [
10] for the other Galileo satellite. A big difference between Milena (E14) and Doresa (E18) with respect to the other satellites regards the validity time of their ephemeris: their orbital error shows a much higher sensitivity than the other satellites to the validity time variations. In particular, the reduction in validity time has a positive effect: by observing the days with the higher RMS (61–65, 71, and 175–178), it can be seen how this value decreases when the validity time decreases. This improvement is also highlighted in the radial, along and across components of the orbital error. As shown in the Results Section, to obtain a SISE
orbit comparable to that of the other satellites, it is necessary to decrease the validity time to 1800 s. This reduction involves a reduction of the epochs in which the satellites can be used. This reduction has been calculated in percentage terms: the epoch-loss is around 5% for Milena (E14) and 8% for Doresa (E18). This is a good result that must be verified appropriately in the position domain with single point positioning algorithms. Here, we want to recall that having two other satellites available will surely improve the achievable positioning accuracy. This aspect will be discussed in a forthcoming publication on which the authors are already working.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}