Design and Construction of an ROV for Underwater Exploration

 ,
,  , ,
, ,  , ,
, ,  and
and 
Abstract
1. Introduction
2. Design and Construction of the ROV
2.1. Electronic Design
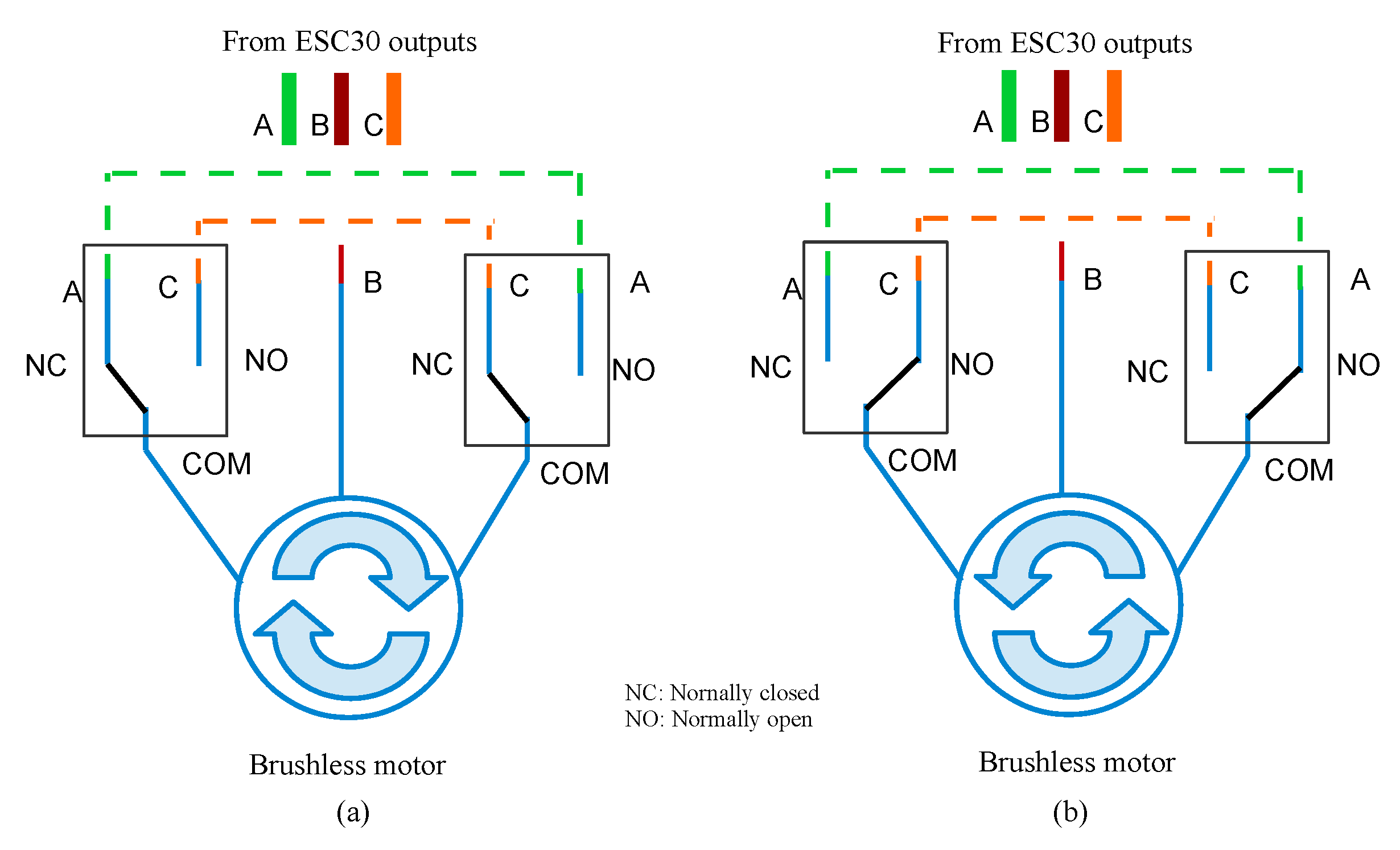
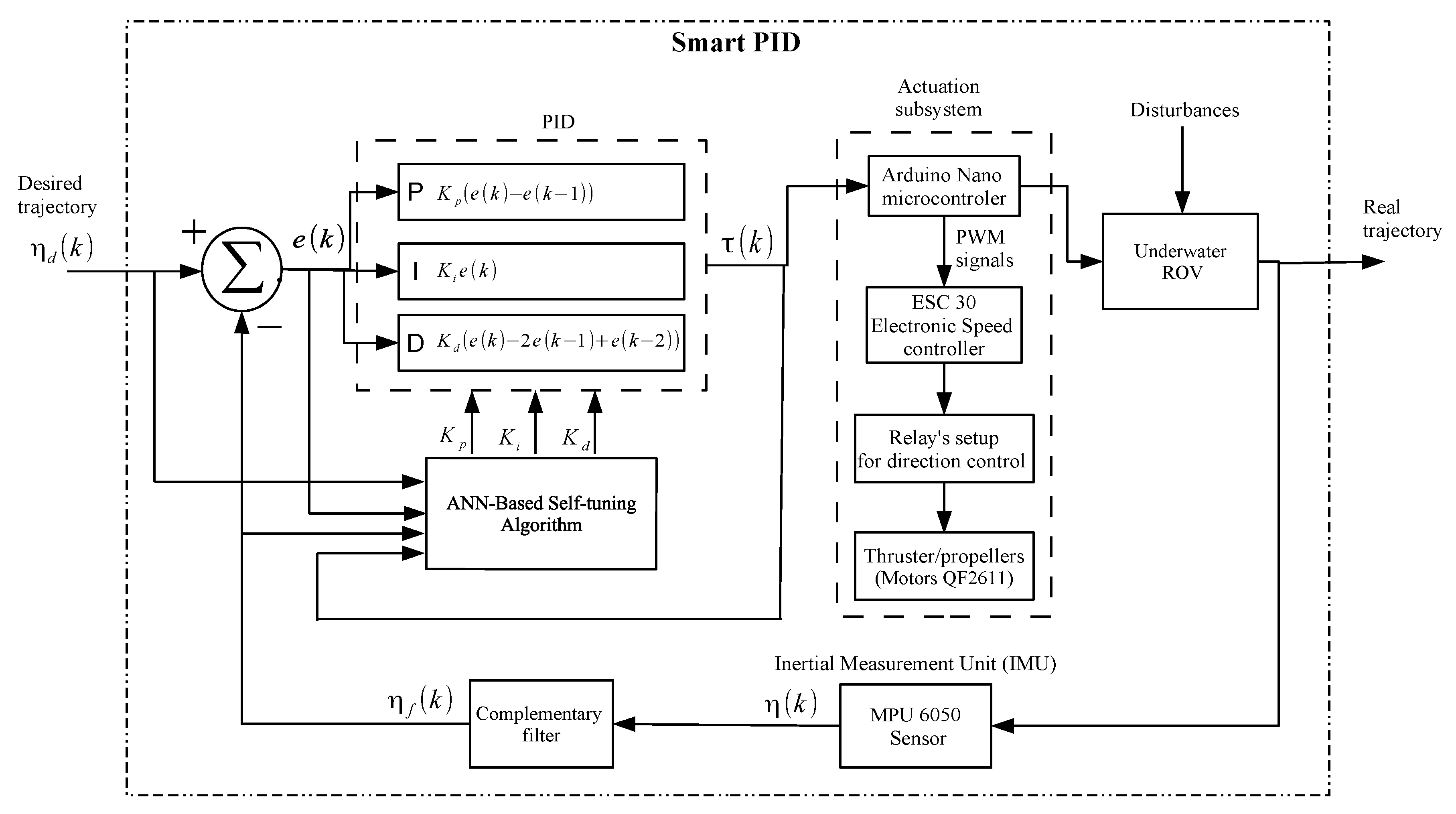
Control and Actuation Subsystems
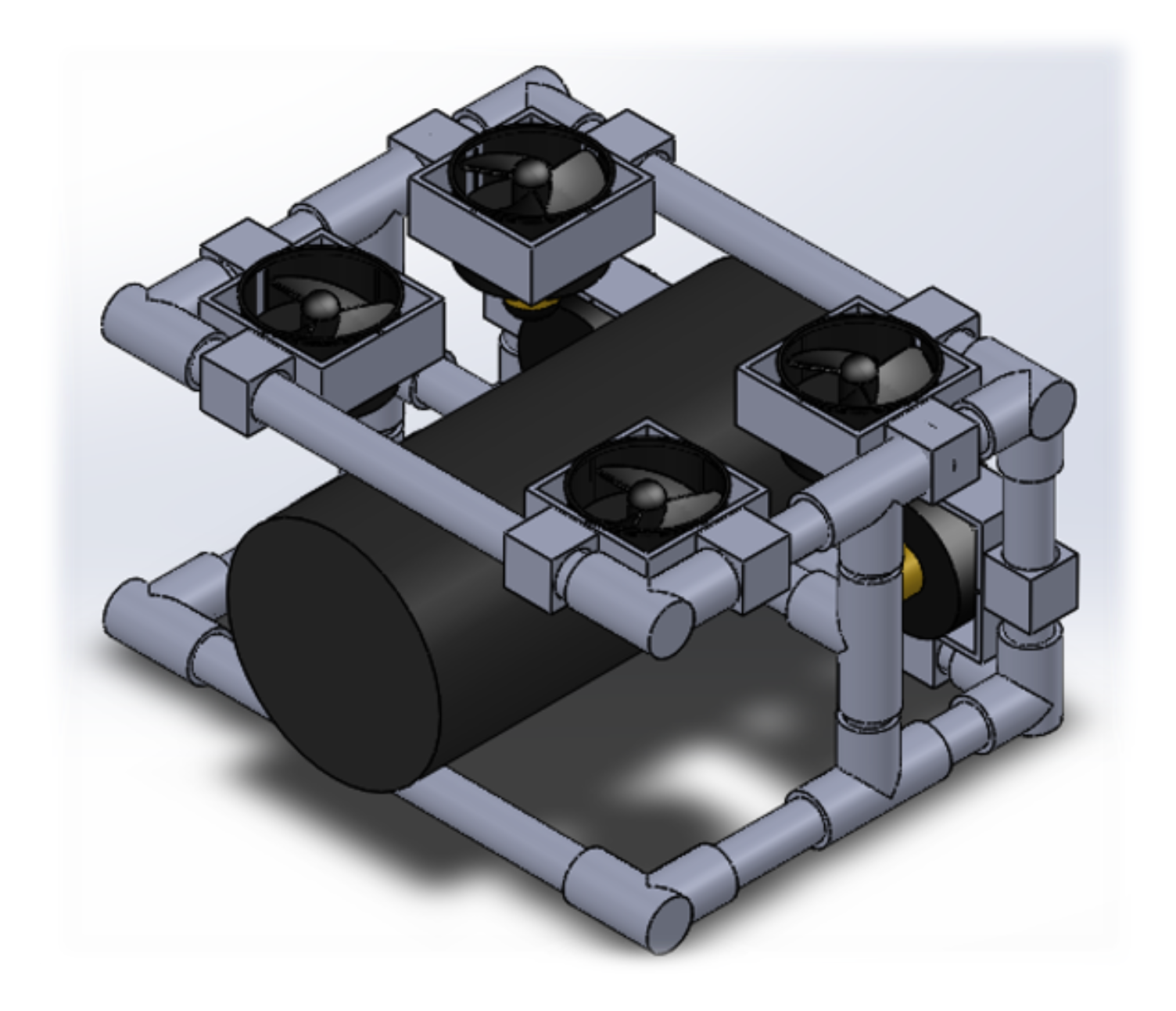
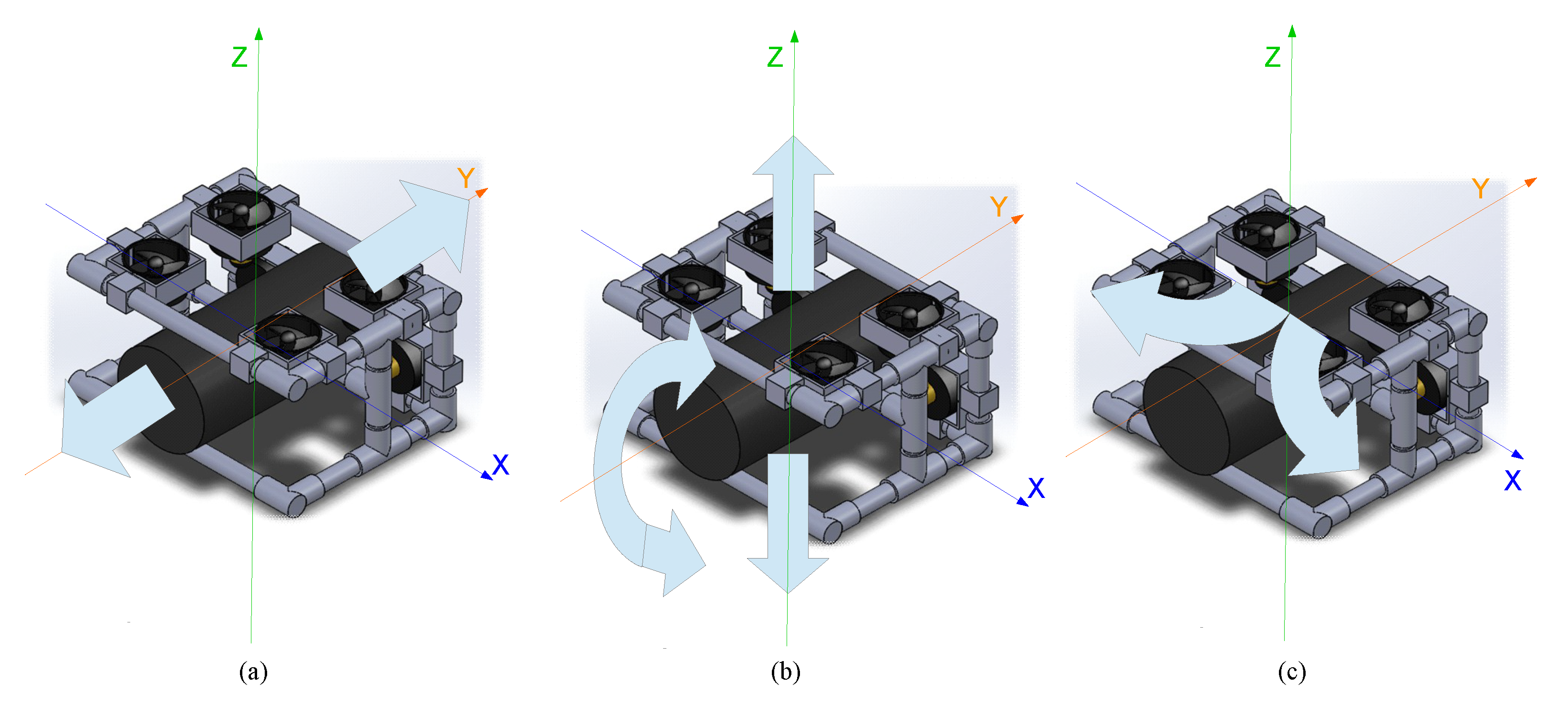
2.2. Mechanical Design
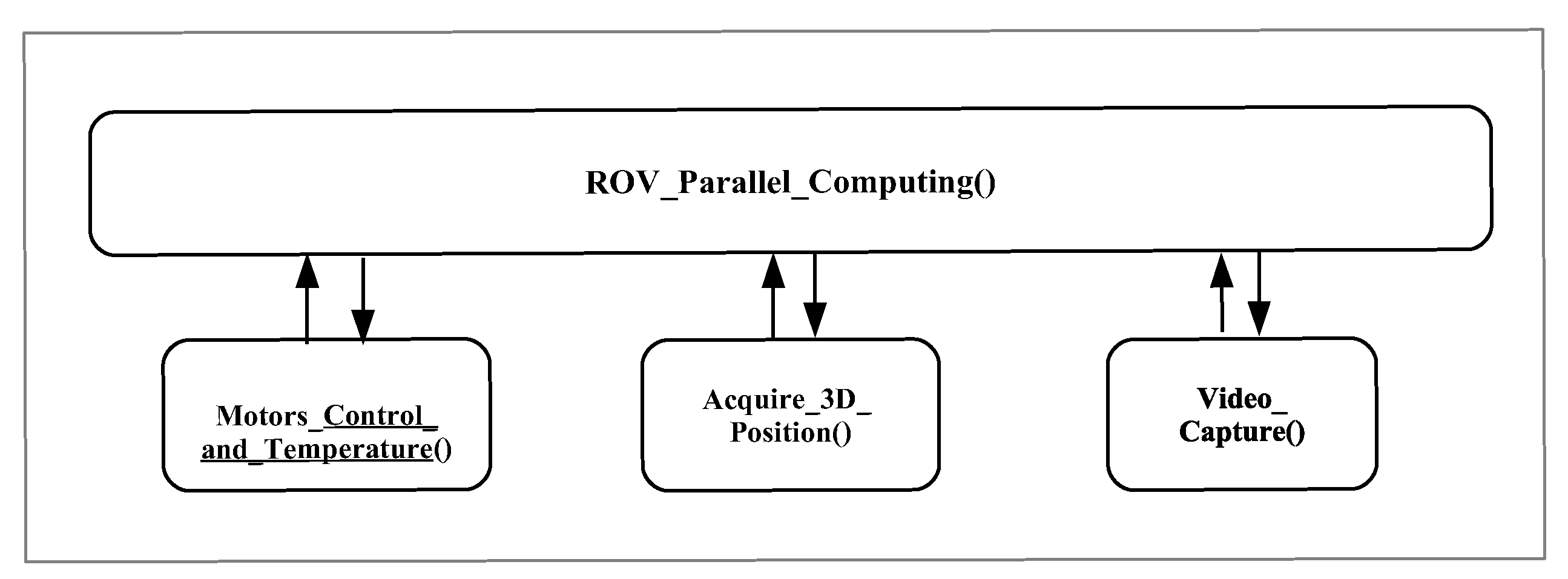
3. ROV Algorithms
| Algorithm 1 Executing the ROV’s algorithms by performing parallel computing. |
|
4. Experimental Results
4.1. ROV Performance
4.1.1. Motors Test
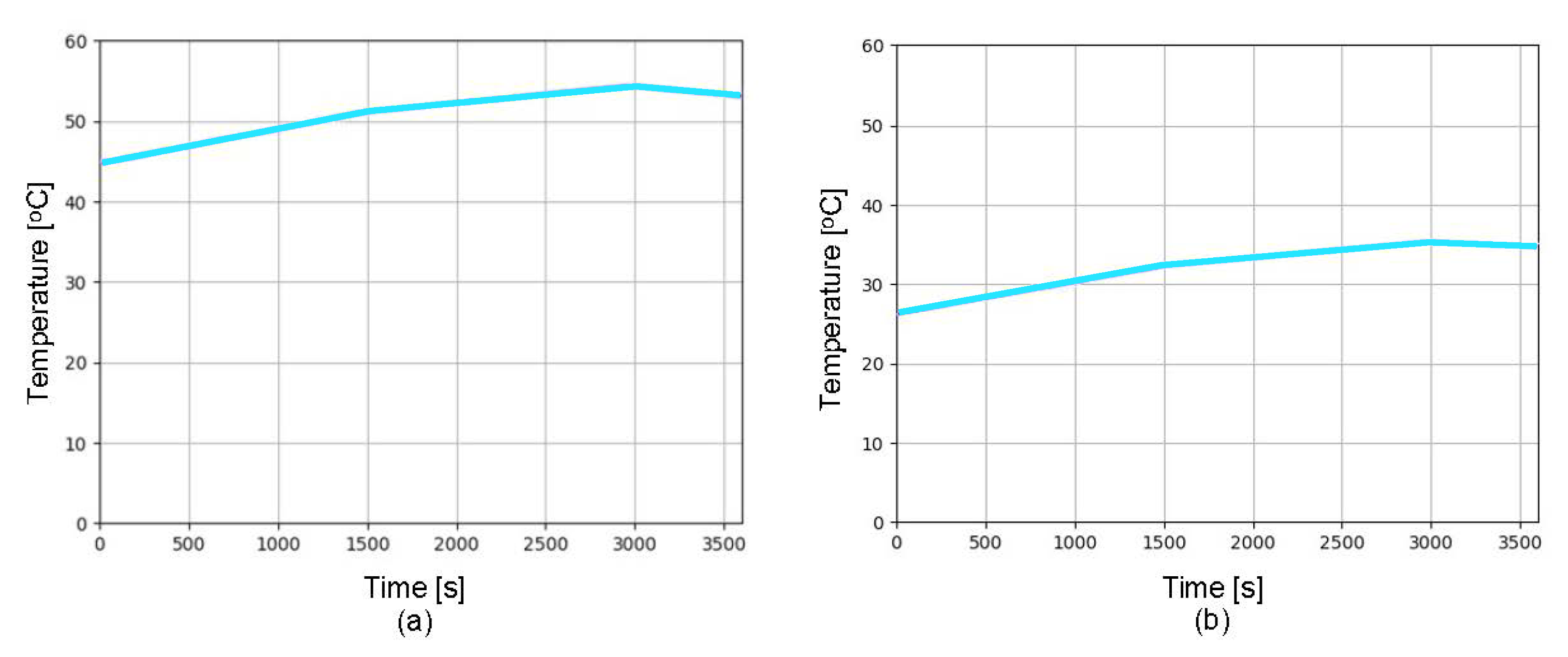
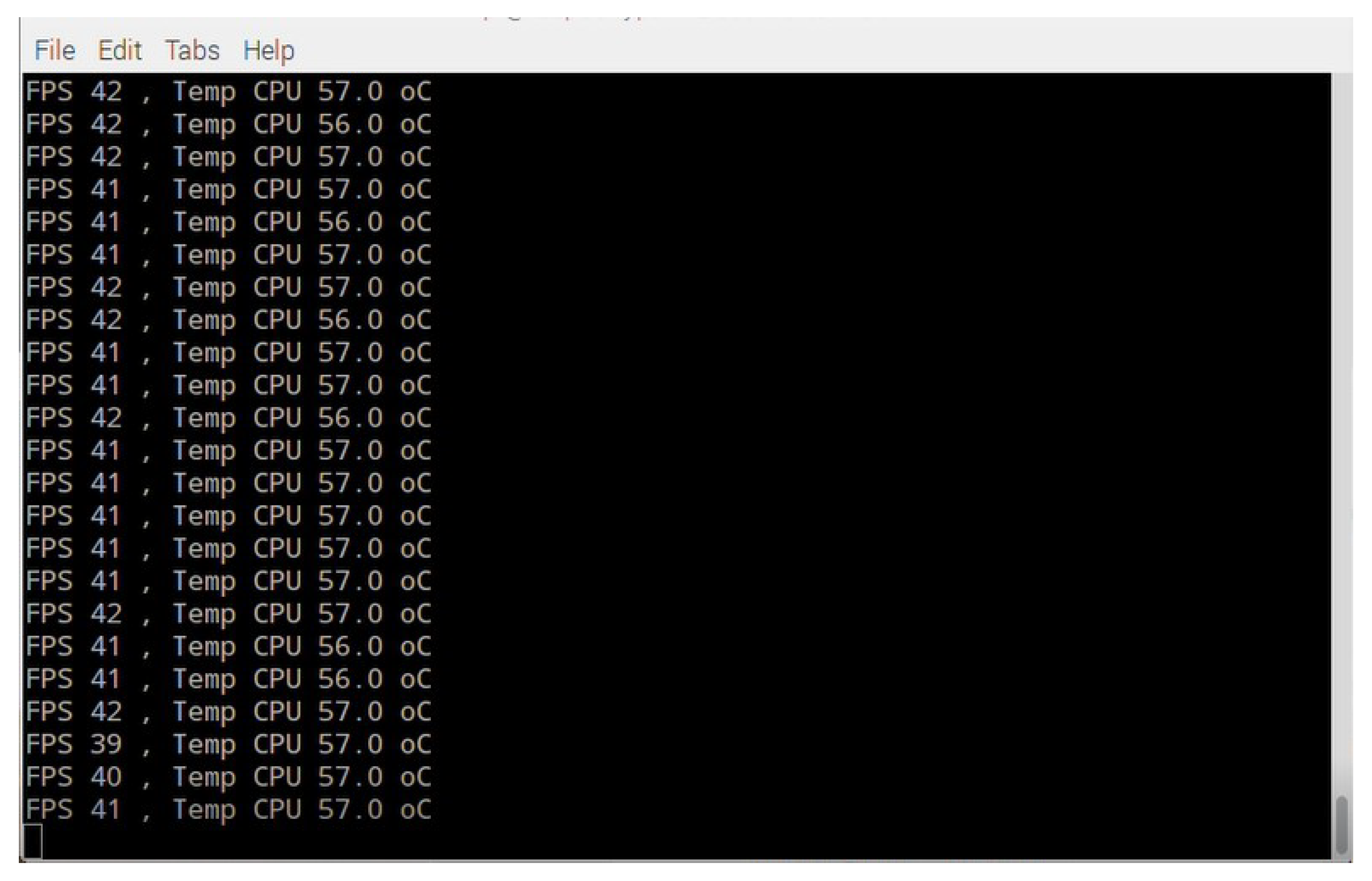
4.1.2. Temperature in SoC Raspberry Pi 3 and ROV Capsule
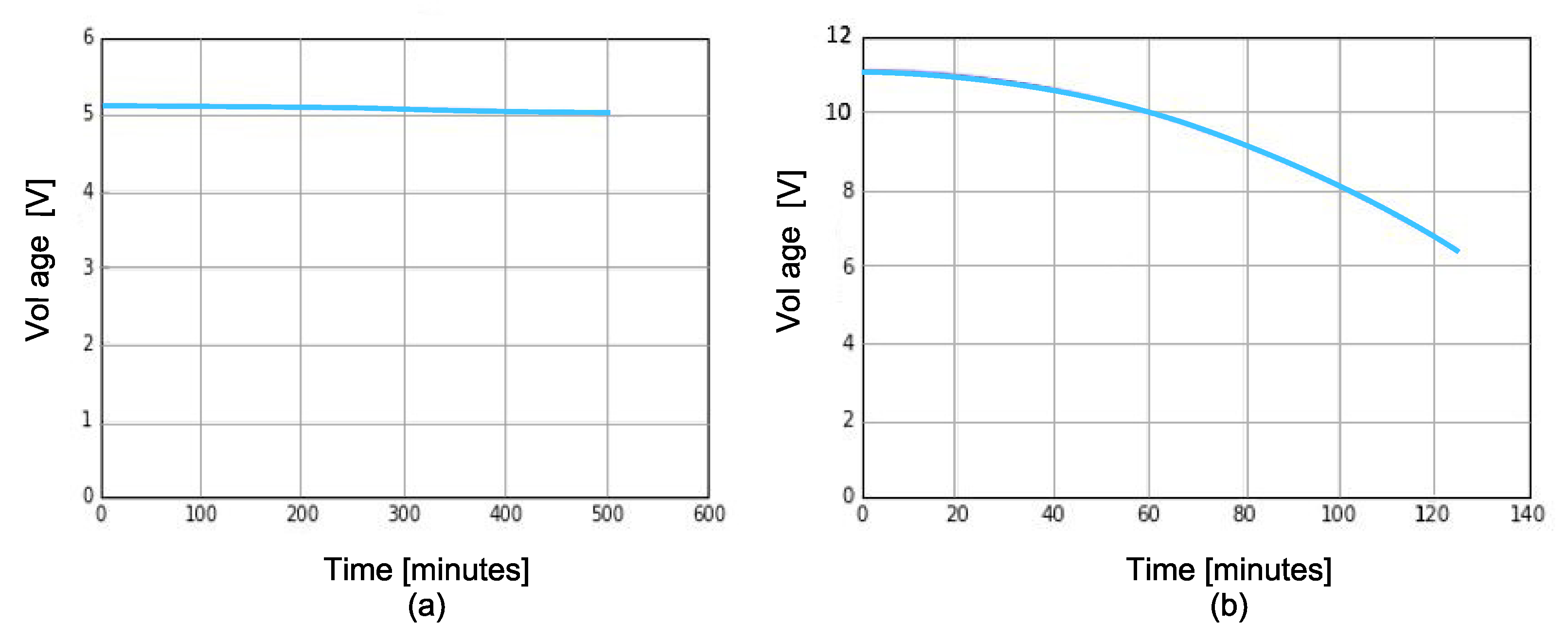
4.1.3. Battery Banks Performance
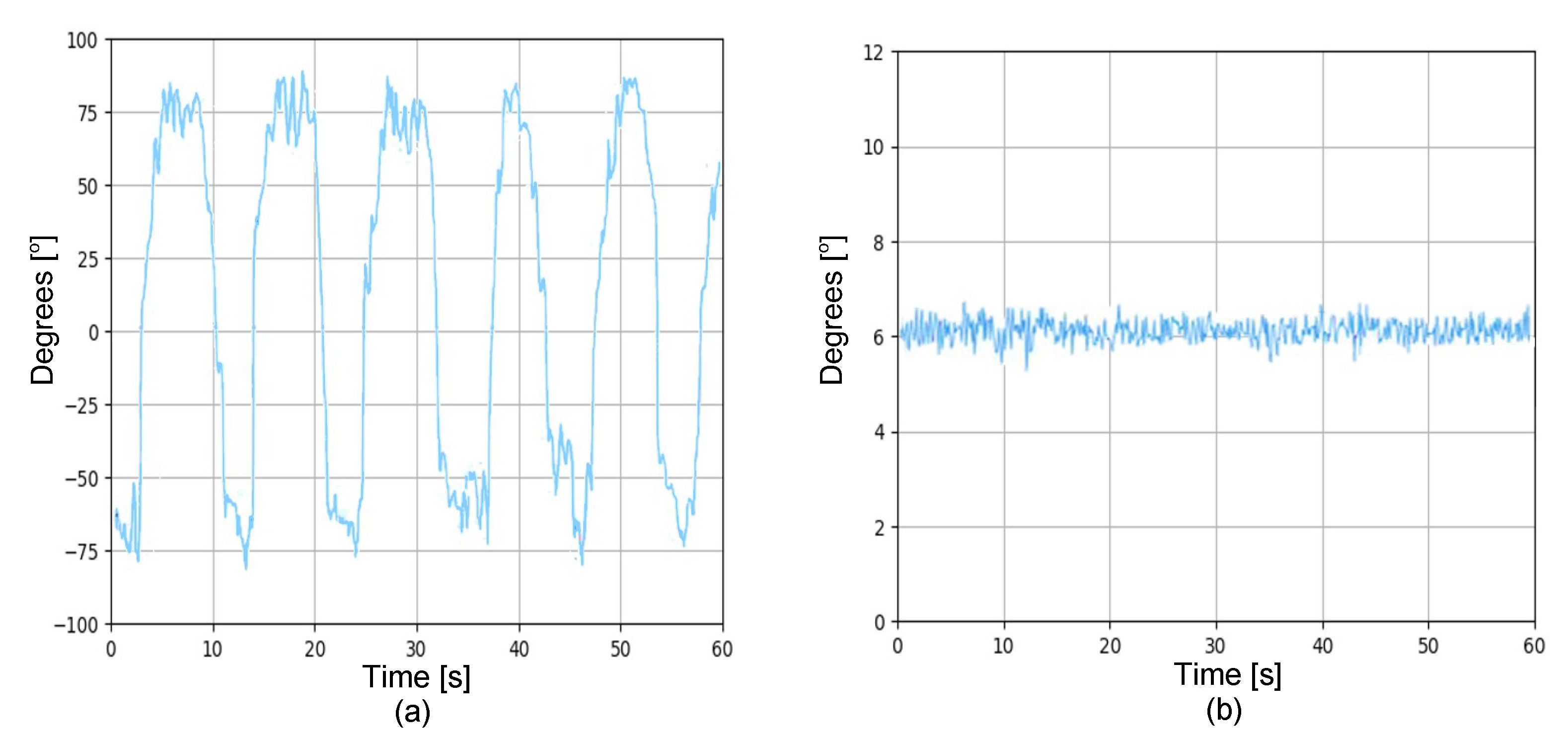
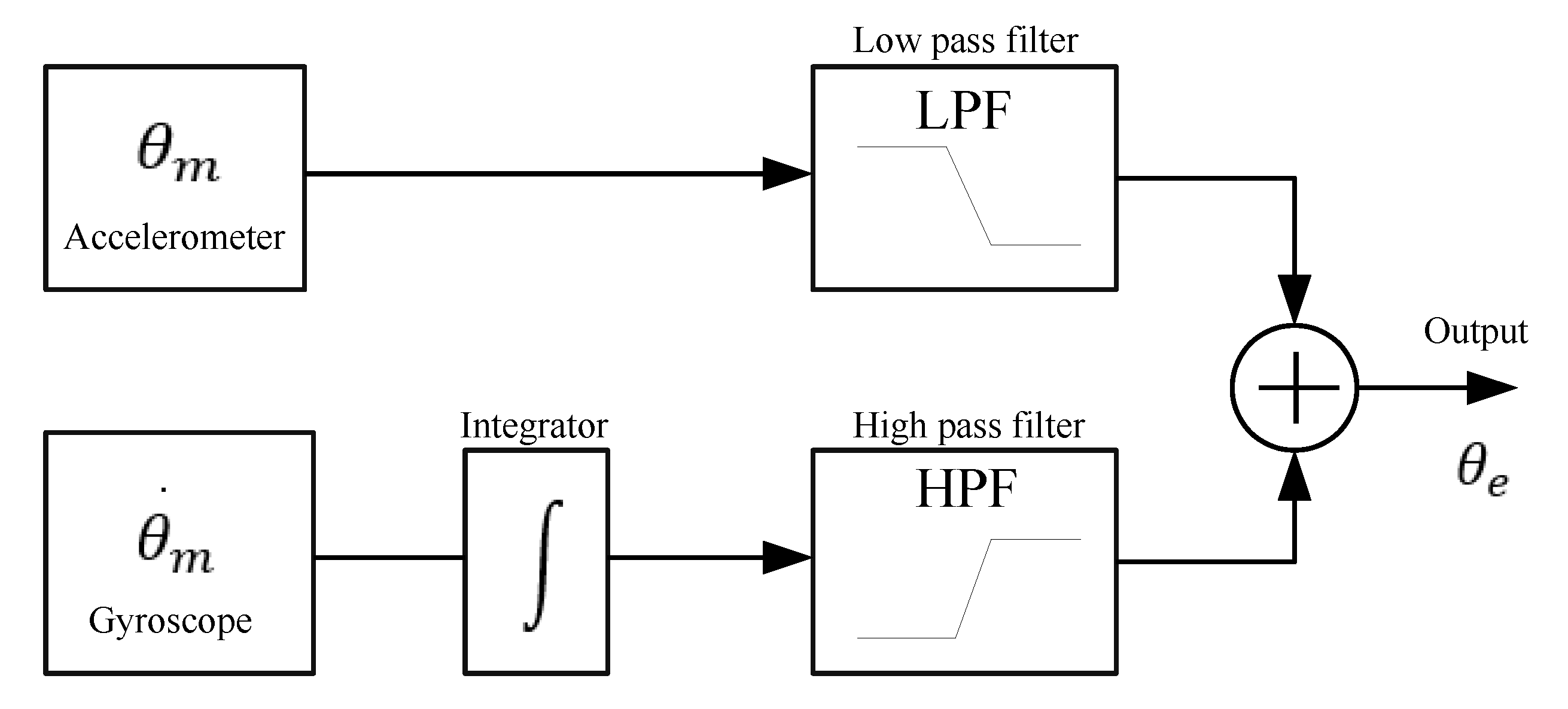
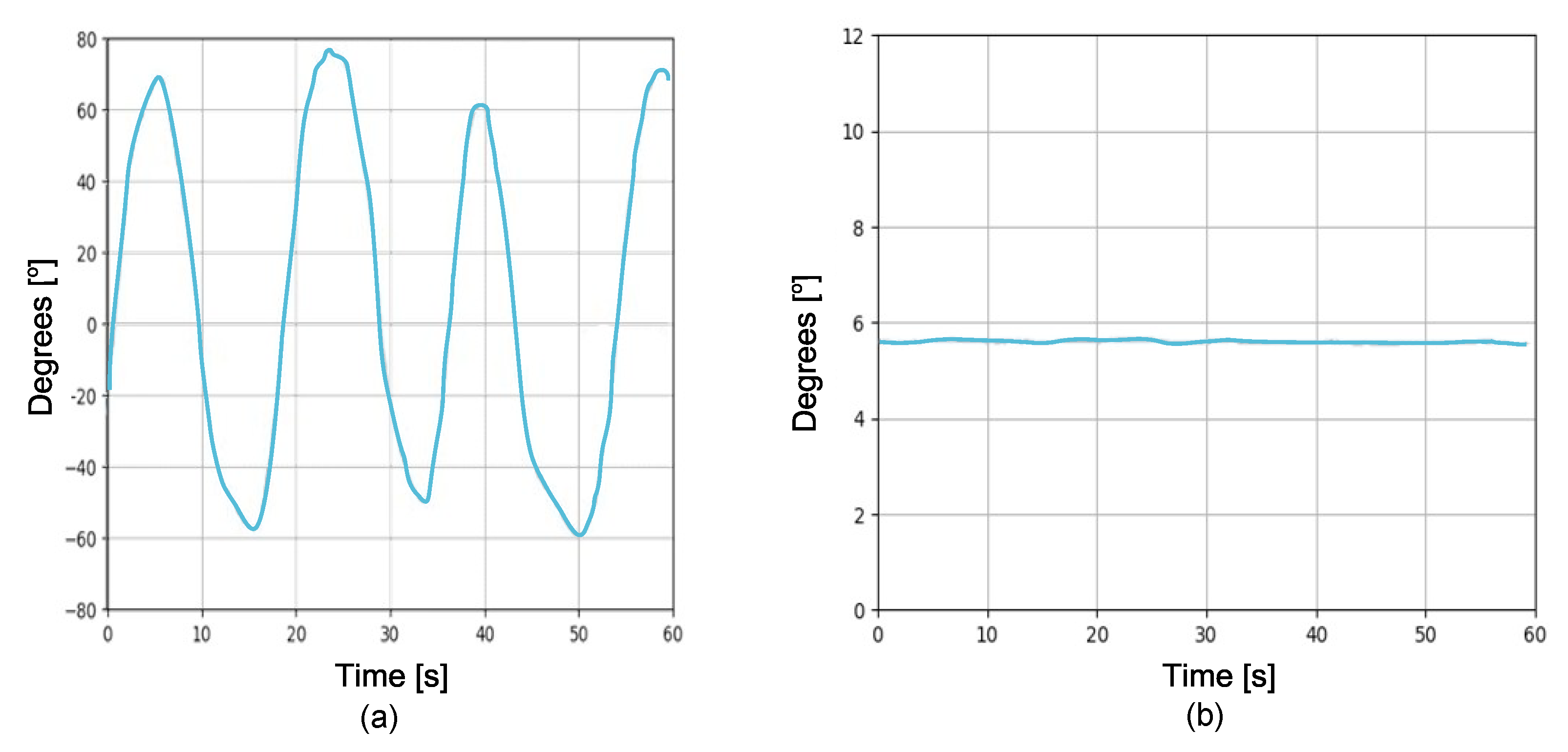
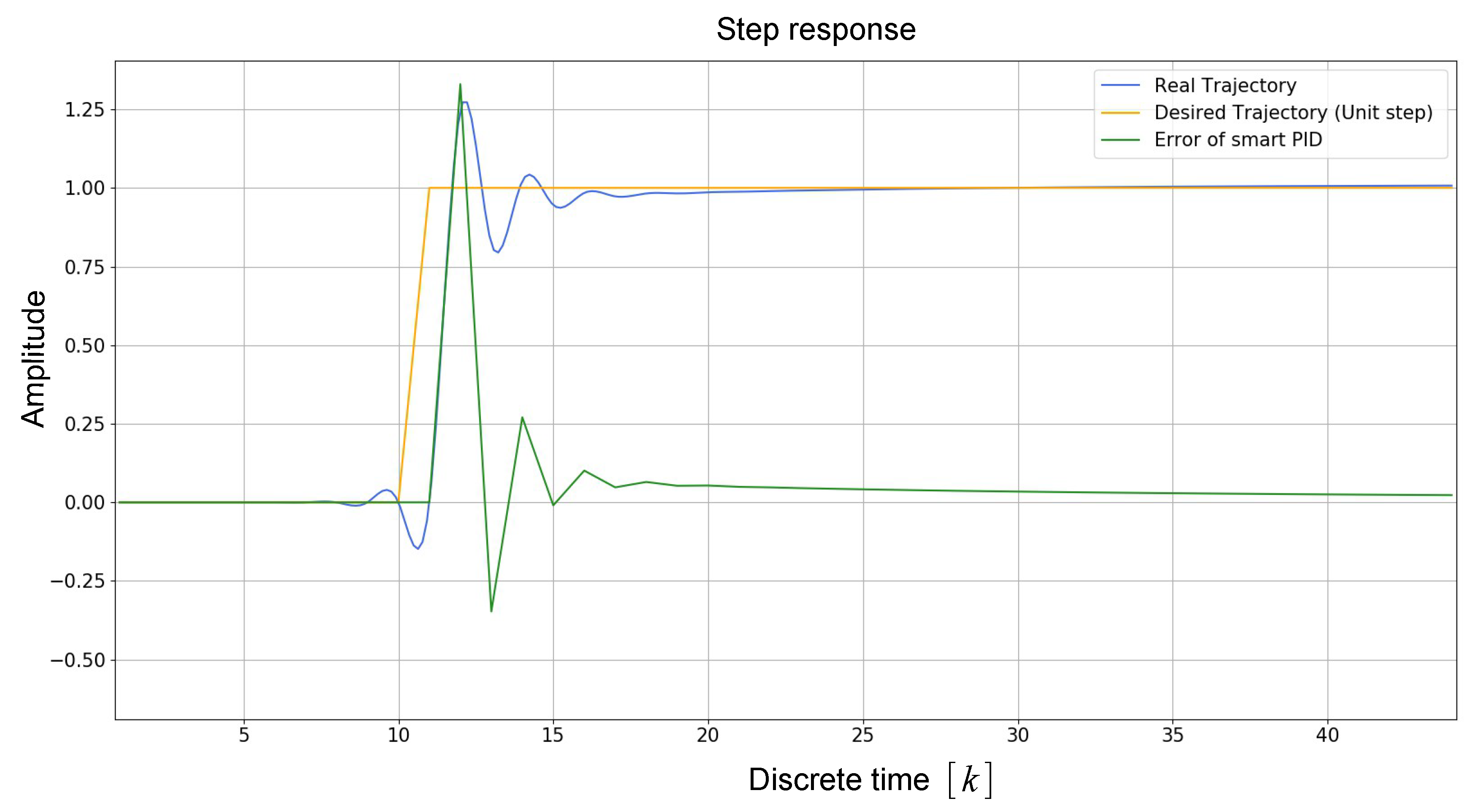
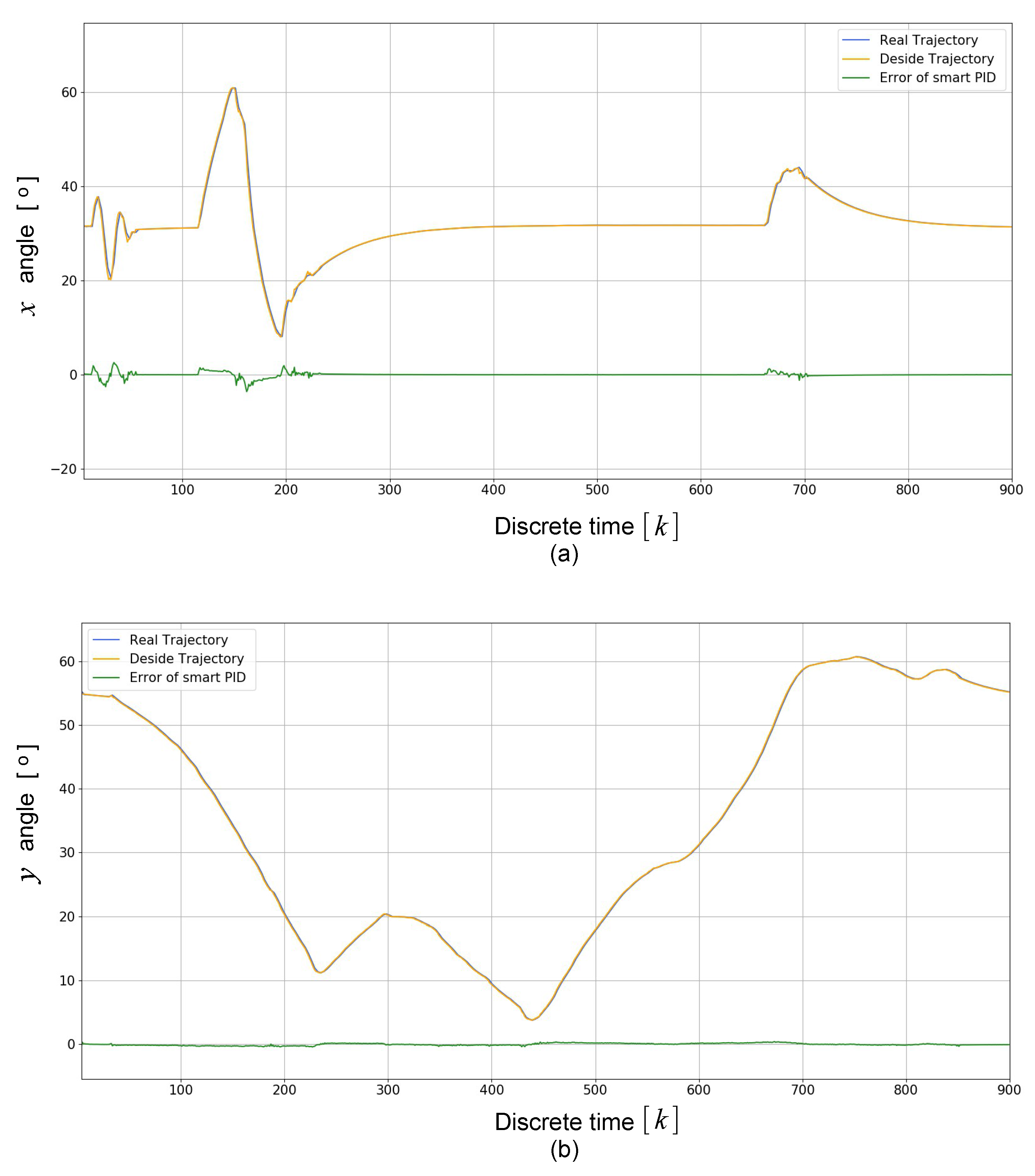
4.1.4. Stability Performance
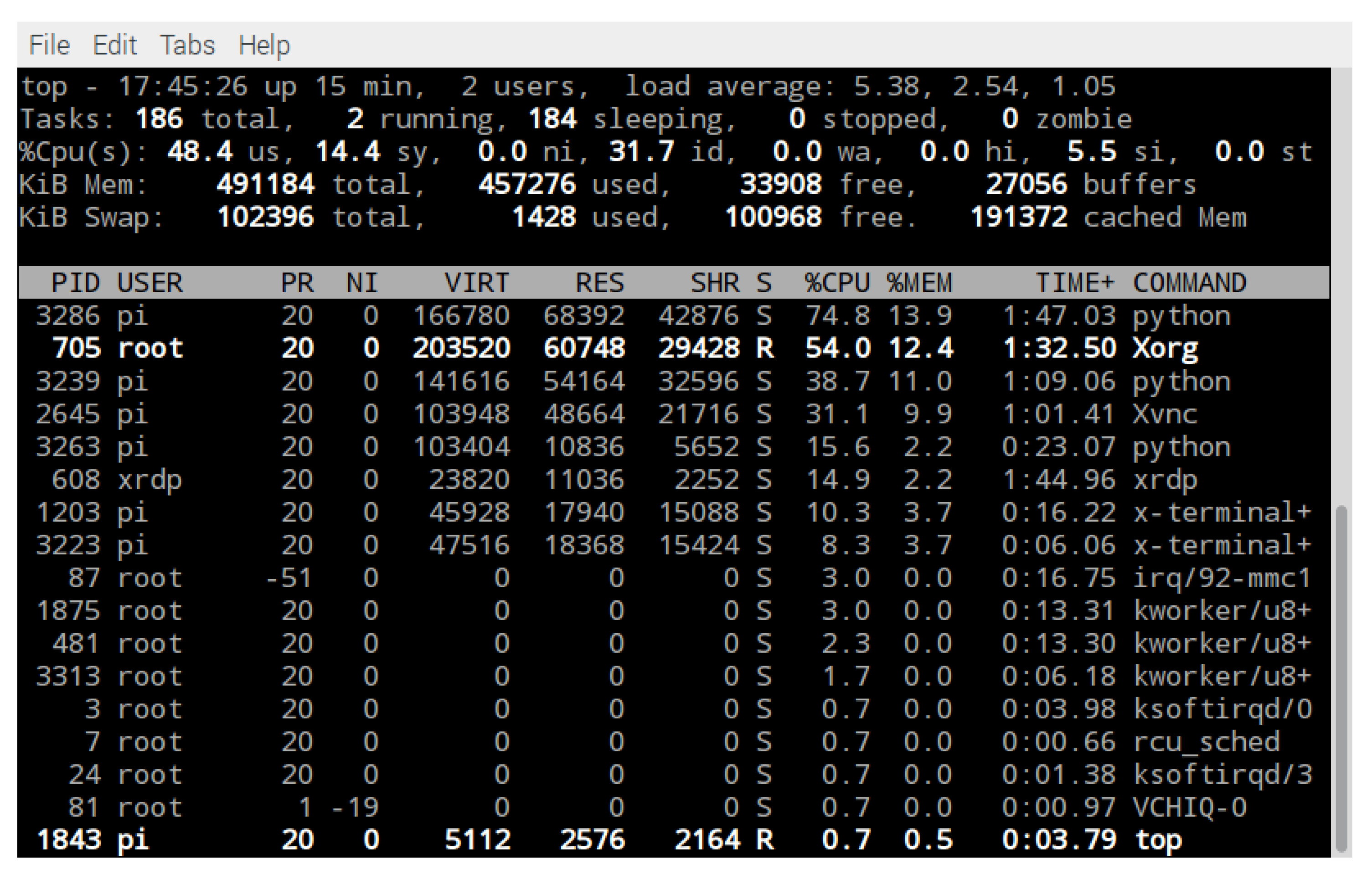
4.2. Hardware Resources
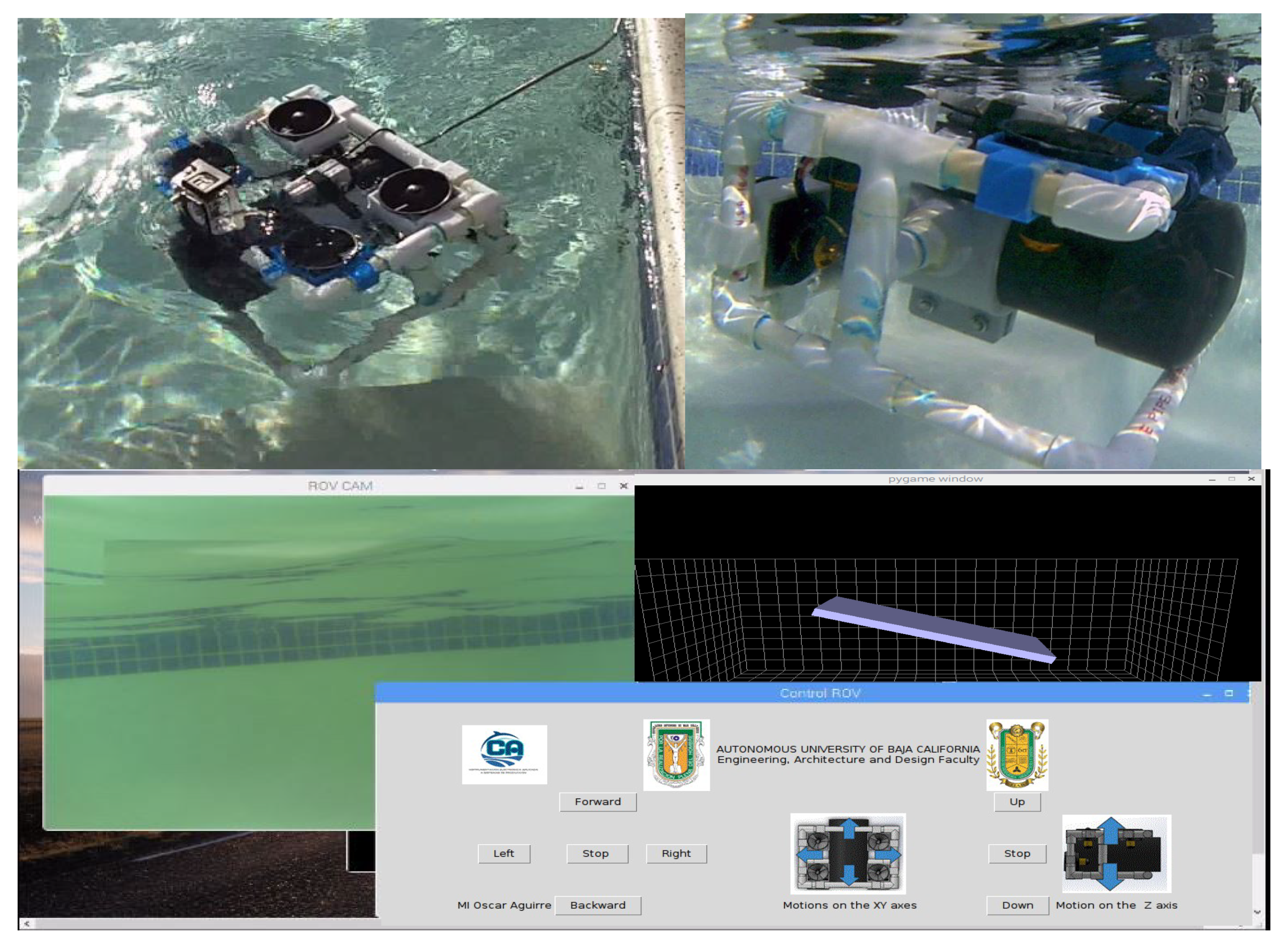
4.3. Tests in Controlled Aquatic Environment
4.4. Tests in Real-World Scenario
4.5. Comparison with Other ROVs
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lin, Y.H.; Chen, S.Y.; Tsou, C.H. Development of an Image Processing Module for Autonomous Underwater Vehicles through Integration of Visual Recognition with Stereoscopic Image Reconstruction. J. Mar. Sci. Eng. 2019, 7. [Google Scholar] [CrossRef]
- Choi, J.K.; Yokobiki, T.; Kawaguchi, K. ROV-Based Automated Cable-Laying System: Application to DONET2 Installation. IEEE J. Ocean. Eng. 2018, 43, 665–676. [Google Scholar] [CrossRef]
- Anderlini, E.; Parker, G.G.; Thomas, G. Control of a ROV carrying an object. Ocean. Eng. 2018, 165, 307–318. [Google Scholar] [CrossRef]
- Capocci, R.; Omerdic, E.; Dooly, G.; Toal, D. Fault-Tolerant Control for ROVs Using Control Reallocation and Power Isolation. J. Mar. Sci. Eng. 2018, 6. [Google Scholar] [CrossRef]
- Liu, X.; Qi, F.; Ye, W.; Cheng, K.; Guo, J.; Zheng, R. Analysis and Modeling Methodologies for Heat Exchanges of Deep-Sea In Situ Spectroscopy Detection System Based on ROV. Sensors 2018, 18. [Google Scholar] [CrossRef]
- Sivčev, S.; Rossi, M.; Coleman, J.; Omerdić, E.; Dooly, G.; Toal, D. Collision Detection for Underwater ROV Manipulator Systems. Sensors 2018, 18. [Google Scholar] [CrossRef]
- Capocci, R.; Dooly, G.; Omerdić, E.; Coleman, J.; Newe, T.; Toal, D. Inspection-class remotely operated vehicles. J. Mar. Sci. Eng. 2017, 5. [Google Scholar] [CrossRef]
- Khojasteh, D.; Kamali, R. Design and dynamic study of a ROV with application to oil and gas industries of Persian Gulf. Ocean Eng. 2017, 136, 18–30. [Google Scholar] [CrossRef]
- Choi, H.T.; Choi, J.; Lee, Y.; Moon, Y.S.; Kim, D.H. New concepts for smart ROV to increase efficiency and productivity. In Proceedings of the 2015 IEEE Underwater Technology, UT 2015, Chennai, India, 23–25 February 2015. [Google Scholar] [CrossRef]
- Yao, H. Research on Unmanned Underwater Vehicle Threat Assessment. IEEE Access 2019, 7, 11387–11396. [Google Scholar] [CrossRef]
- Yan, J.; Gao, J.; Yang, X.; Luo, X.; Guan, X. Tracking control of a remotely operated underwater vehicle with time delay and actuator saturation. Ocean Eng. 2019, 184, 299–310. [Google Scholar] [CrossRef]
- Berg, H.; Hjelmervik, K.T. Classification of anti-submarine warfare sonar targets using a deep neural network. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, USA, 22–25 October 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Ferri, G.; Bates, J.; Stinco, P.; Tesei, A.; Lepage, K. Autonomous underwater surveillance networks: A task allocation framework to manage cooperation. In Proceedings of the 2018 OCEANS—MTS/IEEE Kobe Techno-Oceans (OTO), Port Island, Kobe, 28–31 May 2018. [Google Scholar] [CrossRef]
- Ferri, G.; Munaf, A.; Lepage, K.D. An Autonomous Underwater Vehicle Data-Driven Control Strategy for Target Tracking. IEEE J. Ocean. Eng. 2018, 43, 323–343. [Google Scholar] [CrossRef]
- Choi, J.K.; Yokobiki, T.; Kawaguchi, K. Peer-Reviewed Technical Communication. IEEE J. Ocean. Eng. 2018, 43, 665–676. [Google Scholar] [CrossRef]
- Wang, R.; Chen, G. Design and Experimental Research of Underwater Maintenance Vehicle for Seabed Pipelines. In Proceedings of the 2018 3rd International Conference on Robotics and Automation Engineering (ICRAE), Guangzhou, China, 17–19 November 2018; pp. 146–149. [Google Scholar] [CrossRef]
- Duraibabu, D.B.; Poeggel, S.; Omerdic, E.; Capocci, R.; Lewis, E.; Newe, T.; Leen, G.; Toal, D.; Dooly, G. An Optical Fibre Depth (Pressure) Sensor for Remote Operated Vehicles in Underwater Applications. Sensors 2017, 17, 406. [Google Scholar] [CrossRef] [PubMed]
- Cardigos, S.; Mendes, R. Using LAUVs in highly dynamic environments: Influence of the tidal estuarine outflow in the thermocline structure. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, USA, 22–25 October 2018. [Google Scholar] [CrossRef]
- Brito, M.P.; Griffiths, G. Updating Autonomous Underwater Vehicle Risk Based on the Effectiveness of Failure Prevention and Correction. J. Atmos. Ocean. Technol. 2018, 35, 797–808. [Google Scholar] [CrossRef]
- Sawyer, D.E.; Mason, R.A.; Cook, A.E.; Portnov, A. Submarine Landslides Induce Massive Waves in Subsea Brine Pools. Sci. Rep. 2019, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Ohata, S.; Ishii, K.; Sakai, H.; Tanaka, T.; Ura, T.A. Development of an autonomous underwater vehicle for observation of underwater structures. In Proceedings of the OCEANS 2005 MTS/IEEE, Washington, DC, USA, 17–23 September 2005. [Google Scholar] [CrossRef]
- Jiang, J.-J.; Wang, X.Q.; Duan, F.-J.; Fu, X.; Yan, H.; Hua, B. Bio-Inspired Steganography for Secure Underwater Acoustic Communications. IEEE Commun. Mag. 2018, 56, 156–162. [Google Scholar] [CrossRef]
- Tang, C.; von Lukas, U.F.; Vahl, M.; Wang, S.; Wang, Y.; Tan, M. Efficient underwater image and video enhancement based on Retinex. Signal Image Video Process. 2019, 13, 1011–1018. [Google Scholar] [CrossRef]
- Sanchez-Ferreira, C.; Coelho, L.S.; Ayala, H.V.H.; Farias, M.C.Q.; Llanos, C.H. Bio-inspired optimization algorithms for real underwater image restoration. Signal-Process.-Image Commun. 2019, 77, 49–65. [Google Scholar] [CrossRef]
- Qiao, X.; Bao, J.; Zeng, L.; Zou, J.; Li, D. An automatic active contour method for sea cucumber segmentation in natural underwater environments. Comput. Electron. Agric. 2017, 135, 134–142. [Google Scholar] [CrossRef]
- Ghani, A.S.A.; Isa, N.A.M. Automatic system for improving underwater image contrast and color through recursive adaptive histogram modification. Comput. Electron. Agric. 2017, 141, 181–195. [Google Scholar] [CrossRef]
- Joaquin, A.; Ana, J.; Álvarez, F.J.; Daniel, R.; Carlos, D.M.; Jesus, U. Characterization of an Underwater Positioning System Based on GPS Surface Nodes and Encoded Acoustic Signals. IEEE Trans. Instrum. Meas. 2016, 65, 1773–1784. [Google Scholar] [CrossRef]
- Philipp, M.; Michele, M.; Luca, B. Self-Sustaining Acoustic Sensor With Programmable Pattern Recognition for Underwater Monitoring. IEEE Trans. Instrum. Meas. 2019, 68, 1–10. [Google Scholar] [CrossRef]
- Li, Q.; Ben, Y.; Naqvi, S.M.; Neasham, J.A.; Chambers, J.A. Robust Student’s t-Based Cooperative Navigation for Autonomous Underwater Vehicles. IEEE Trans. Instrum. Meas. 2018, 67, 1762–1777. [Google Scholar] [CrossRef]
- Chi, C.; Li, Z. High-Resolution Real-Time Underwater 3-D Acoustical Imaging Through Designing Ultralarge Ultrasparse Ultra-Wideband 2-D Arrays. IEEE Trans. Instrum. Meas. 2017, 66, 2647–2657. [Google Scholar] [CrossRef]
- Rossi, M.; Trslić, P.; Sivčev, S.; Riordan, J.; Toal, D.; Dooly, G. Real-Time Underwater StereoFusion. Sensors 2018, 18. [Google Scholar] [CrossRef] [PubMed]
- Anwar, I.; Mohsin, M.O.; Iqbal, S.; Abideen, Z.U.; Rehman, A.U.; Ahmed, N. Design and fabrication of an underwater remotely operated vehicle (Single thruster configuration). In Proceedings of the 2016 13th International Bhurban Conference on Applied Sciences and Technology (IBCAST), Islamabad, Pakistan, 12–16 January 2016; pp. 547–553. [Google Scholar] [CrossRef]
- Mesa, M.A.; Forero, D.Y.; Hernandez, R.D.; Sandoval, M.C. Design and Construction of an AUV Robot Type ROV. J. Eng. Appl. Sci. 2018, 13, 7980–7989. [Google Scholar] [CrossRef]
- García-Valdovinos, L.G.; Fonseca-Navarro, F.; Aizpuru-Zinkunegi, J.; Salgado-Jiménez, T.; Gómez-Espinosa, A.; Cruz-Ledesma, J.A. Neuro-Sliding Control for Underwater ROV’s Subject to Unknown Disturbances. Sensors 2019, 19. [Google Scholar] [CrossRef]
- Cely, J.S.; Saltaren, R.; Portilla, G.; Yakrangi, O.; Rodriguez-Barroso, A. Experimental and Computational Methodology for the Determination of Hydrodynamic Coefficients Based on Free Decay Test: Application to Conception and Control of Underwater Robots. Sensors 2019, 19. [Google Scholar] [CrossRef]
- Martorell-torres, E.; Martorell-torres, E.; Gabriel, G.F.; Base, S. Xiroi ASV: A Modular Autonomous Surface Vehicle to Link Communications. IFAC Papers Online 2018, 51, 147–152. [Google Scholar] [CrossRef]
- Xu, R.; Tang, G.; Xie, D.; Huang, D. Underactuated tracking control of underwater vehicles using control moment gyros. Int. J. Adv. Robot. Syst. 2018, 1–8. [Google Scholar] [CrossRef]
- Teague, J.; Allen, M.J.; Scott, T.B. The potential of low-cost ROV for use in deep-sea mineral, ore prospecting and monitoring. Ocean Eng. 2018, 147, 333–339. [Google Scholar] [CrossRef]
- Bustos, C.; Sanchez, J.; García, L.G.; Orozco, J.P. CFD Modeling of the Hydrodynamics of the CIDESI Underwater Glider. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, USA, 22–25 October 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, G.; Zeng, Q.; Zhu, Z.; Dai, X.; Zhu, C.; Dai, X. Research on underwater safety inspection and operational robot motion control. In Proceedings of the 2018 33rd Youth Academic Annual Conference of Chinese Association of Automation (YAC), Nanjing, China, 18–20 May 2018; pp. 322–327. [Google Scholar] [CrossRef]
- Chen, X. Effects of leading-edge tubercles on hydrodynamic characteristics at different Reynolds numbers. In Proceedings of the 2018 OCEANS—MTS/IEEE Kobe Techno-Oceans (OTO), Port Island, Kobe, 28–31 May 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Hernández-Ontiveros, J.M.; Inzunza-González, E.; García-Guerrero, E.E.; López-Bonilla, O.R.; Infante-Prieto, S.O.; Cárdenas-Valdez, J.R.; Tlelo-Cuautle, E. Development and implementation of a fish counter by using an embedded system. Comput. Electron. Agric. 2018, 145, 53–62. [Google Scholar] [CrossRef]
- Flores-Vergara, A.; Inzunza-González, E.; García-Guerrero, E.E.; López-Bonilla, O.R.; Rodríguez-Orozco, E.; Hernández-Ontiveros, J.M.; Cárdenas-Valdez, J.R.; Tlelo-Cuautle, E. Implementing a Chaotic Cryptosystem by Performing Parallel Computing on Embedded Systems with Multiprocessors. Entropy 2019, 21, 268. [Google Scholar] [CrossRef]
- Hernández-Alvarado, R.; García-Valdovinos, L.G.; Salgado-Jiménez, T.; Gómez-Espinosa, A.; Fonseca-Navarro, F. Neural Network-Based Self-Tuning PID Control for Underwater Vehicles. Sensors 2016, 16. [Google Scholar] [CrossRef] [PubMed]
- Brzozowski, B.; Rochala, Z.; Wojtowicz, K.; Wieczorek, P. Measurement data fusion with cascaded Kalman and complementary filter in the flight parameter indicator for hang-glider and paraglider. Measurement 2018, 123, 94–101. [Google Scholar] [CrossRef]
- Yang, Q.; Sun, L. A fuzzy complementary Kalman filter based on visual and IMU data for UAV landing. Optik 2018, 173, 279–291. [Google Scholar] [CrossRef]
- Pititeeraphab, Y.; Jusing, T.; Chotikunnan, P.; Thongpance, N.; Lekdee, W.; Teerasoradech, A. The Effect of Average Filter for Complementary Filter and Kalman Filter Based on Measurement Angle. In Proceedings of the 2016 9th Biomedical Engineering International Conference (BMEiCON), Laung Prabang, Laos, 7–9 December 2016. [Google Scholar] [CrossRef]
- Wang, W.H.; Engelaar, R.C.; Chen, X.Q.; Chase, J.G. The State-of-Art of Underwater Vehicles—Theories and Applications. In Mobile Robots—State of the Art in Land, Sea, Air, and Collaborative Missions; IntechOpen: London, UK, 2012; Volume 2000. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quantity (Pieces) | Description | Size [cm] |
|---|---|---|
| 4 | PVC pipe | 1.27 × 25 |
| 4 | Corner connector | 1.27 |
| 2 | PVC pipe | 1.27 × 11.5 |
| 5 | T-connector | 1.27 |
| 4 | PVC pipe | 1.27 × 5 |
| 4 | L-connector | 1.27 |
| 1 | PVC pipe | 10.16 × 25 |
| Item | Quantity | Weight [kg] | Total Weight [kg] |
|---|---|---|---|
| PVC structure | 1 | 6.940 | 6.940 |
| Battery 11.1 V | 6 | 0.200 | 1.200 |
| Battery 5.0 V | 1 | 0.200 | 0.200 |
| Raspberry Pi | 1 | 0.100 | 0.100 |
| Arduino Nano | 1 | 0.001 | 0.010 |
| Relays | 6 | 0.150 | 0.900 |
| ESC30A | 6 | 0.050 | 0.300 |
| Brusless motor | 6 | 0.225 | 1.350 |
| Steel bars | 8 | 0.580 | 4.640 |
| Total weight | 15.64 |
| Features | Blue ROV (Standard) | OpenROV | Proposed ROV |
|---|---|---|---|
| Architecture | Open | Open | Open |
| Camera 1080 p | Yes | Yes | Yes |
| Autonomy time [h] | 2–3 | 2–3 | 2–3 |
| Communication | Ethernet | Ethernet | Ethernet |
| Internet connectivity | Yes | Yes | Yes |
| Maximum depth [m] | 100 | 100 | 100 |
| Processing type | Unknown | Unknown | Parallel |
| Frames per second [FPS] | 30 | 30 | 42 |
| Controller algorithm | PID | PID | Smart PID |
| Remote control | Joystick | Joystick for | Graphic user |
| Android 5 | interface * | ||
| Payload [kg] | 2.200 | 1.000 | 3.128 |
| Dimensions (length×width×height) [cm] | 45.7 × 33.8 × 25.4 | 8 × 20 × 40 | 18.4 × 29.5 × 33.5 |
| Total weight [kg] | 11.00 | 2.90 | 15.64 |
| Total cost [USD] | 2784.0 | 1695.0 | 600.0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aguirre-Castro, O.A.; Inzunza-González, E.; García-Guerrero, E.E.; Tlelo-Cuautle, E.; López-Bonilla, O.R.; Olguín-Tiznado, J.E.; Cárdenas-Valdez, J. Design and Construction of an ROV for Underwater Exploration. Sensors 2019, 19, 5387. https://doi.org/10.3390/s19245387
Aguirre-Castro OA, Inzunza-González E, García-Guerrero EE, Tlelo-Cuautle E, López-Bonilla OR, Olguín-Tiznado JE, Cárdenas-Valdez J. Design and Construction of an ROV for Underwater Exploration. Sensors. 2019; 19(24):5387. https://doi.org/10.3390/s19245387
Chicago/Turabian StyleAguirre-Castro, Oscar Adrian, Everardo Inzunza-González, Enrique Efrén García-Guerrero, Esteban Tlelo-Cuautle, Oscar Roberto López-Bonilla, Jesús Everardo Olguín-Tiznado, and José Ricardo Cárdenas-Valdez. 2019. "Design and Construction of an ROV for Underwater Exploration" Sensors 19, no. 24: 5387. https://doi.org/10.3390/s19245387
APA StyleAguirre-Castro, O. A., Inzunza-González, E., García-Guerrero, E. E., Tlelo-Cuautle, E., López-Bonilla, O. R., Olguín-Tiznado, J. E., & Cárdenas-Valdez, J. (2019). Design and Construction of an ROV for Underwater Exploration. Sensors, 19(24), 5387. https://doi.org/10.3390/s19245387