BLE Fingerprint Indoor Localization Algorithm Based on Eight-Neighborhood Template Matching

Abstract
:1. Introduction
2. Related Works
2.1. Algorithms of KNN and WKNN
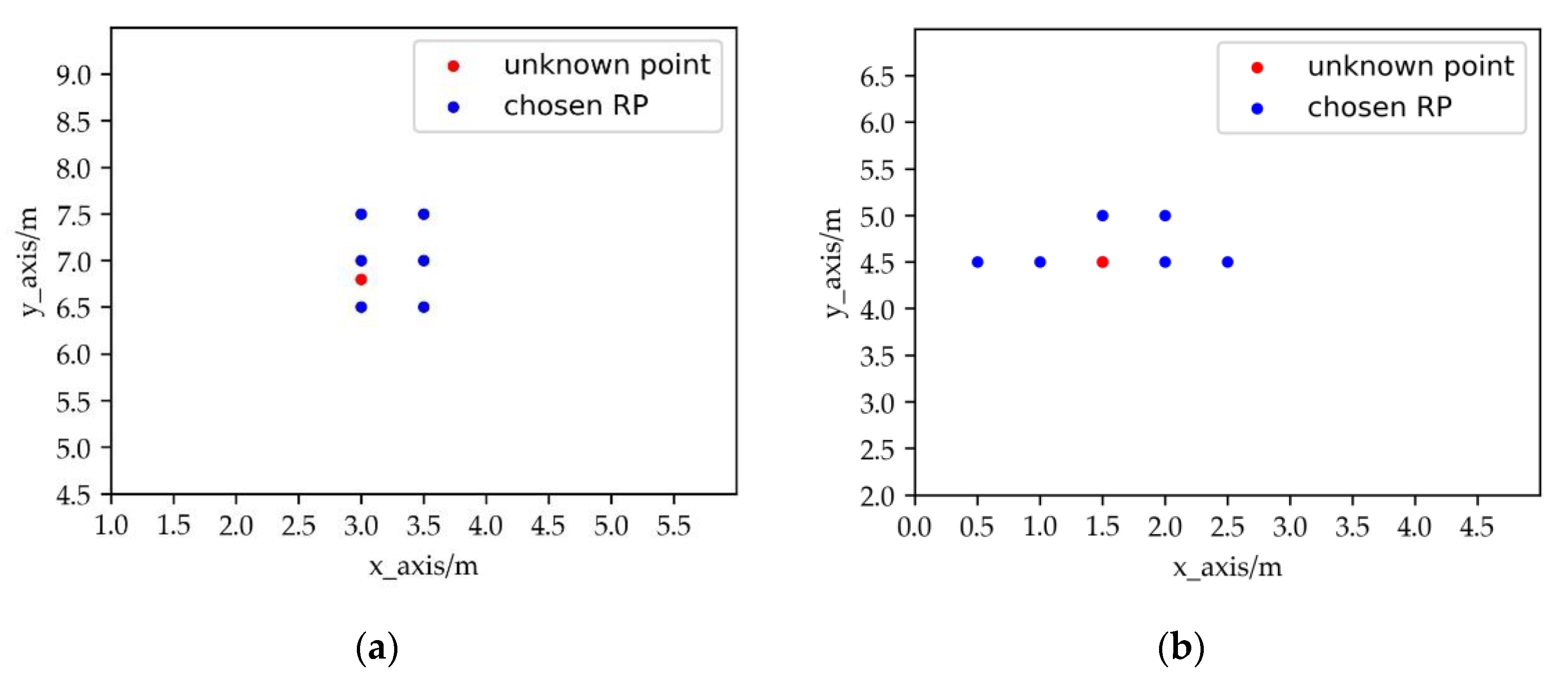
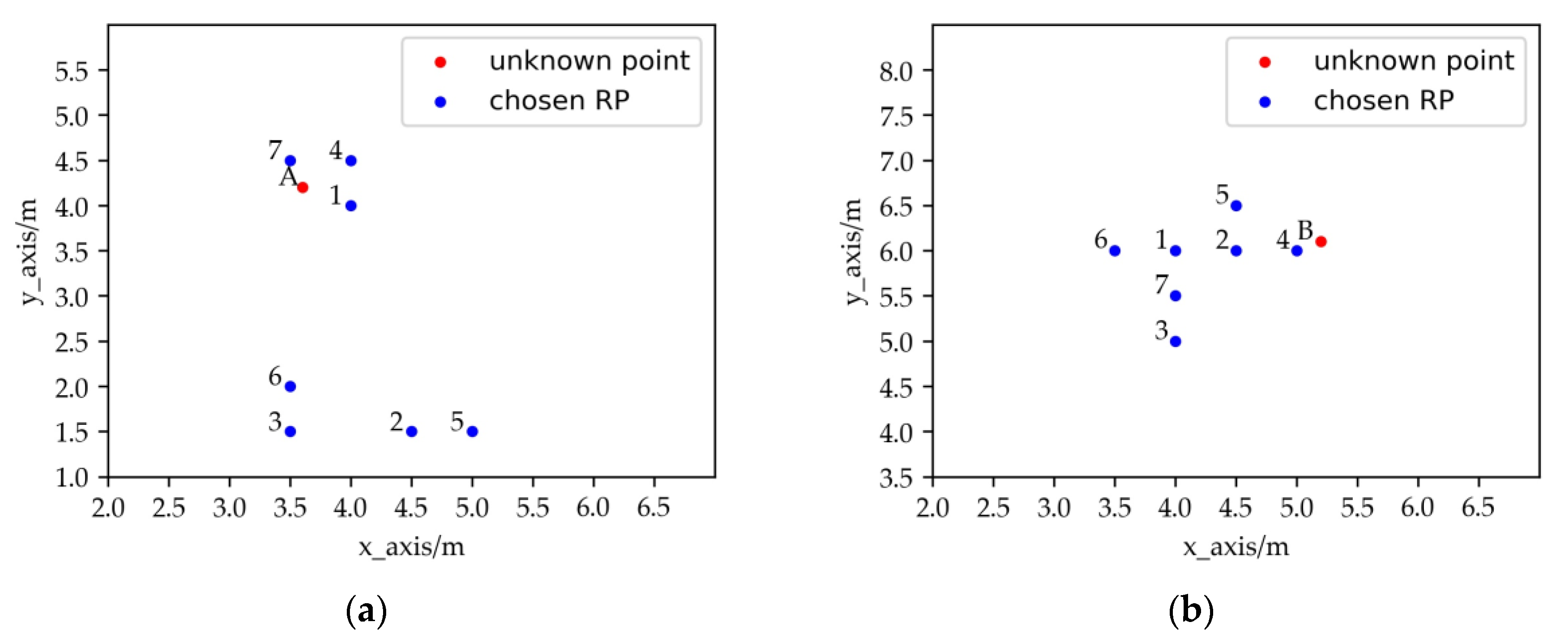
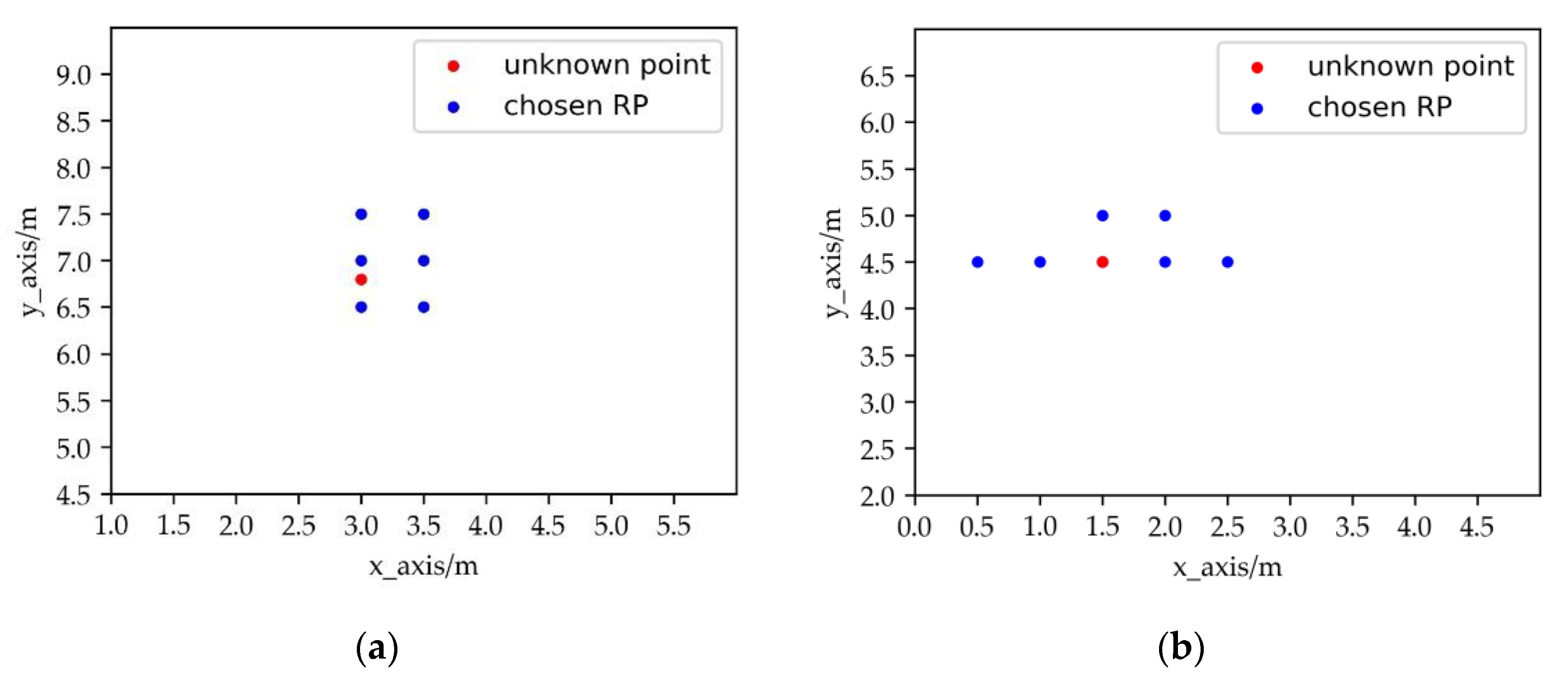
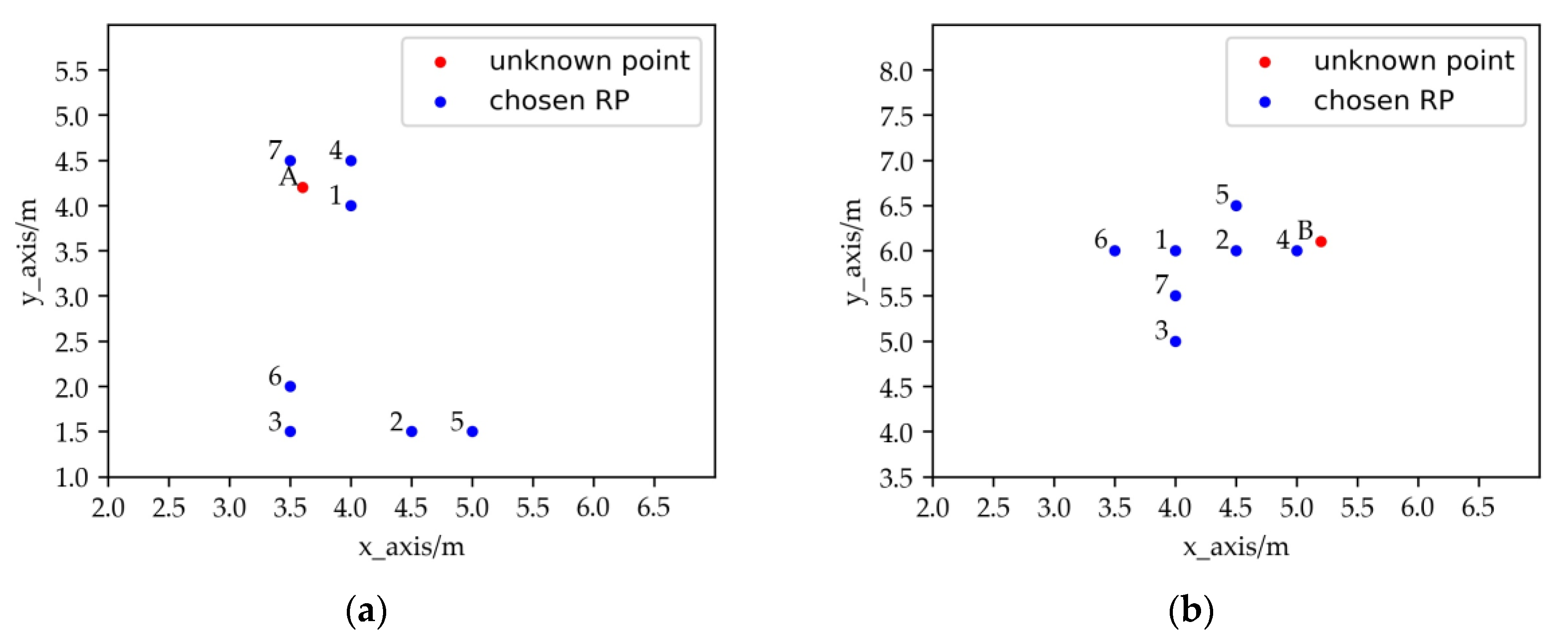
2.2. Problems in Application
3. Proposed ENTM Algorithm
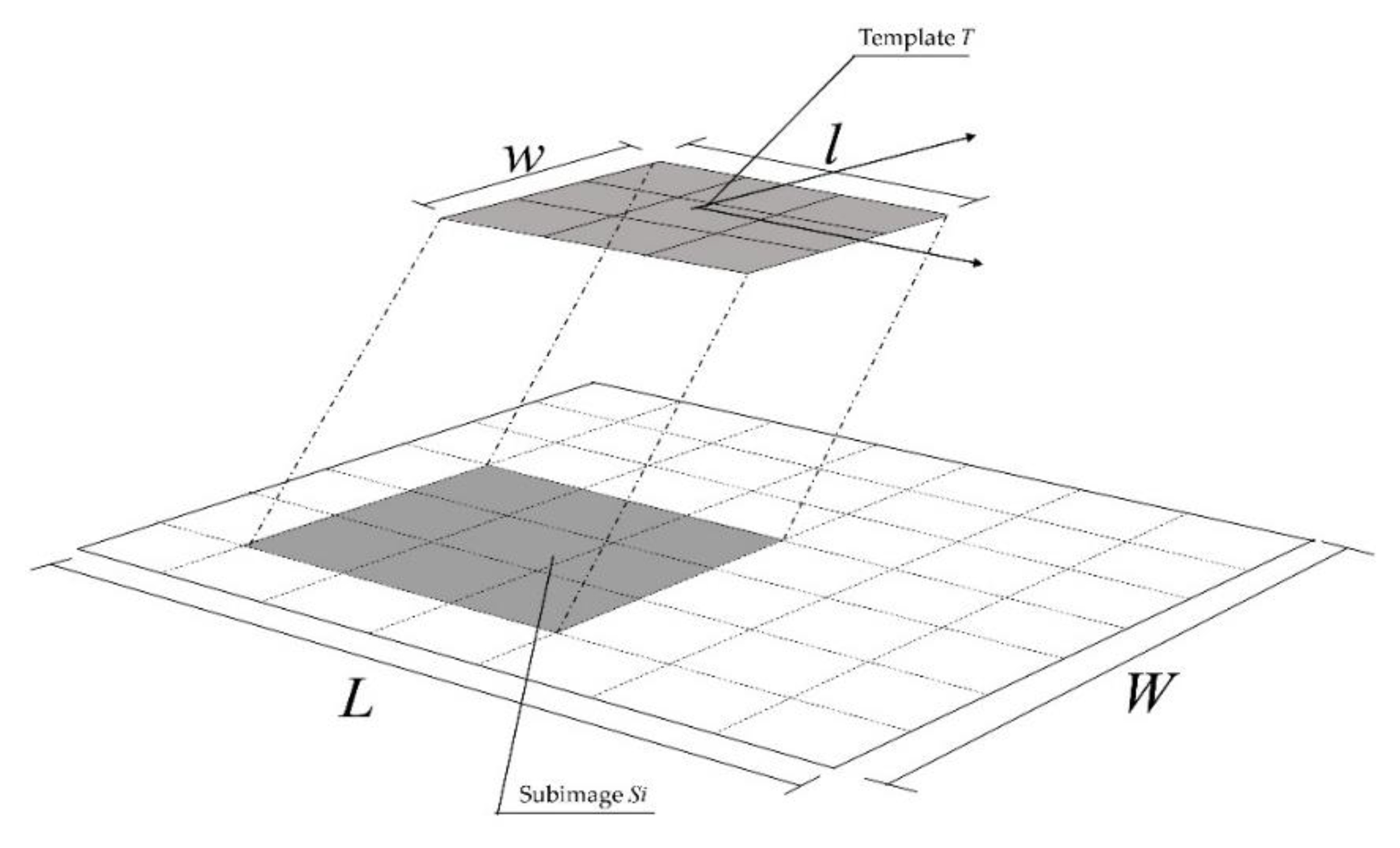
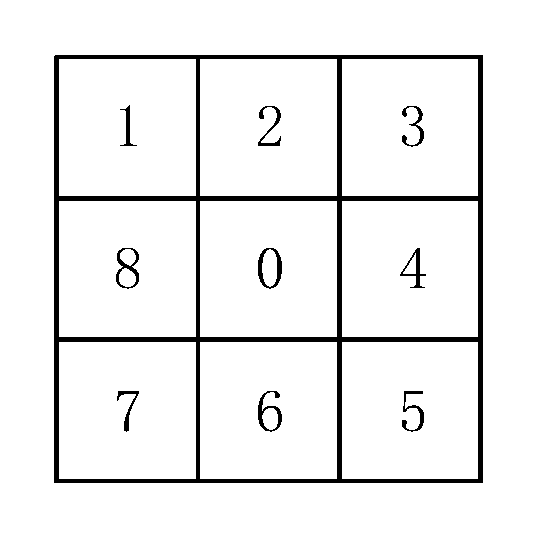
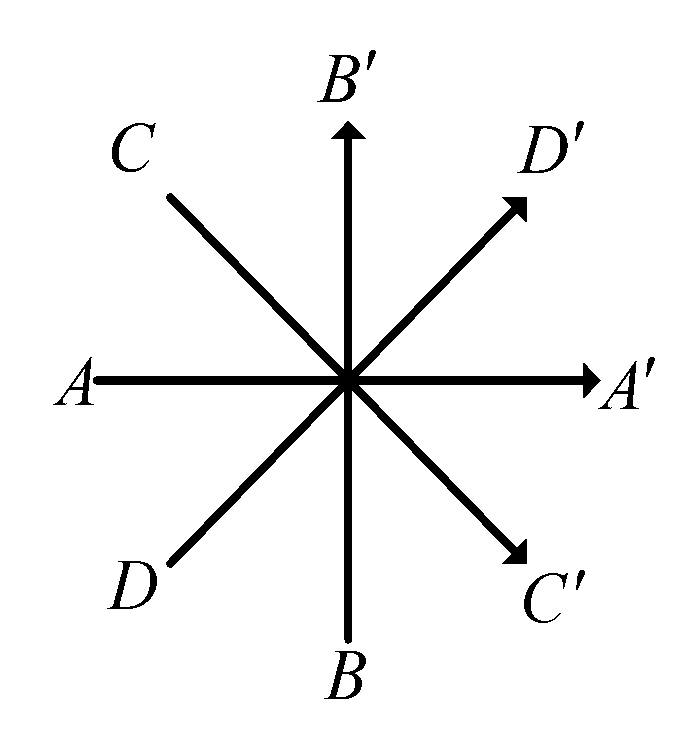
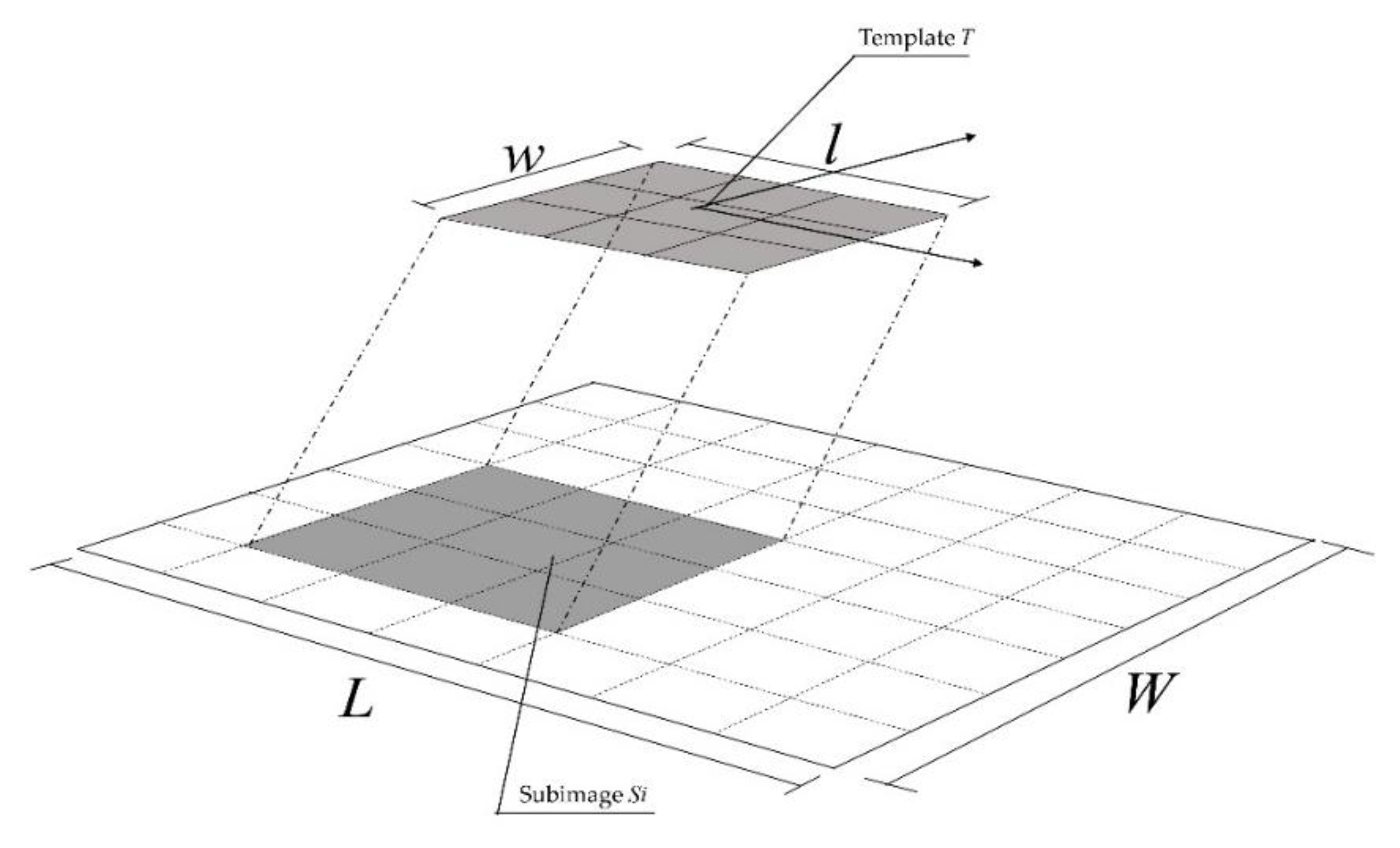
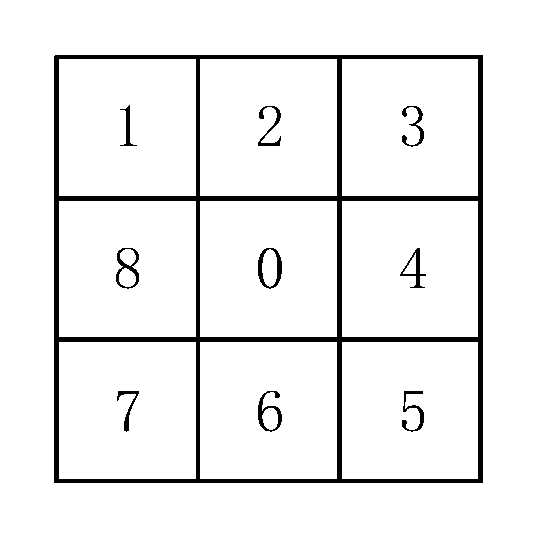
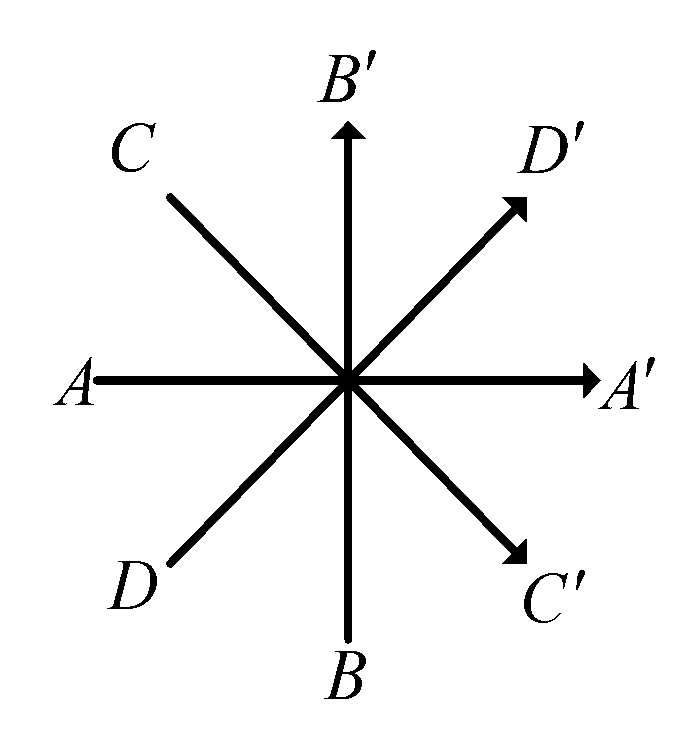
3.1. Template Matching and Eight-Neighborhood
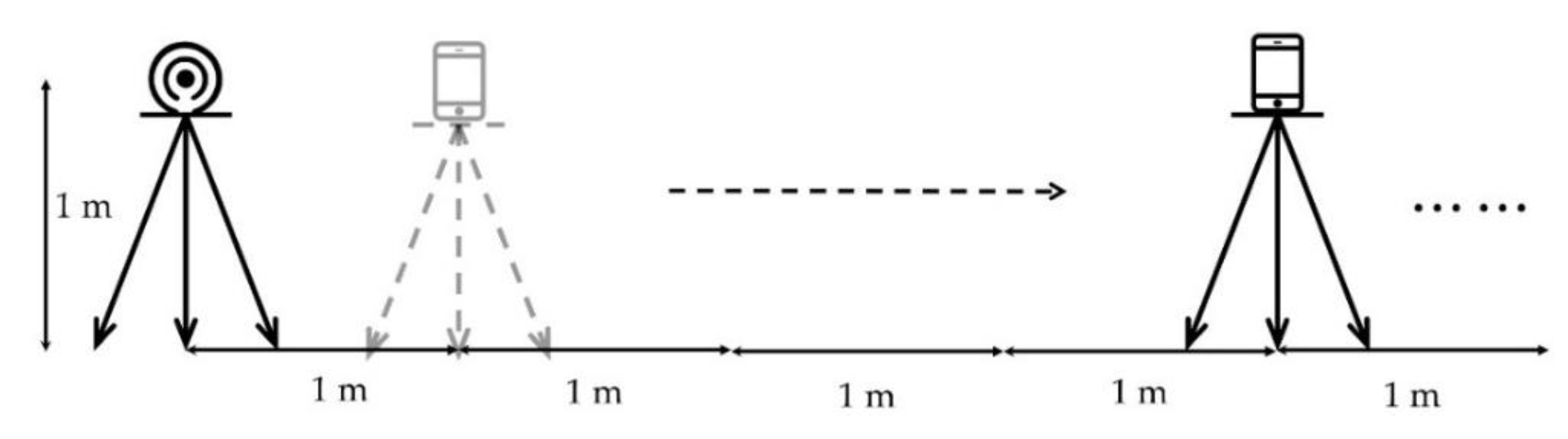
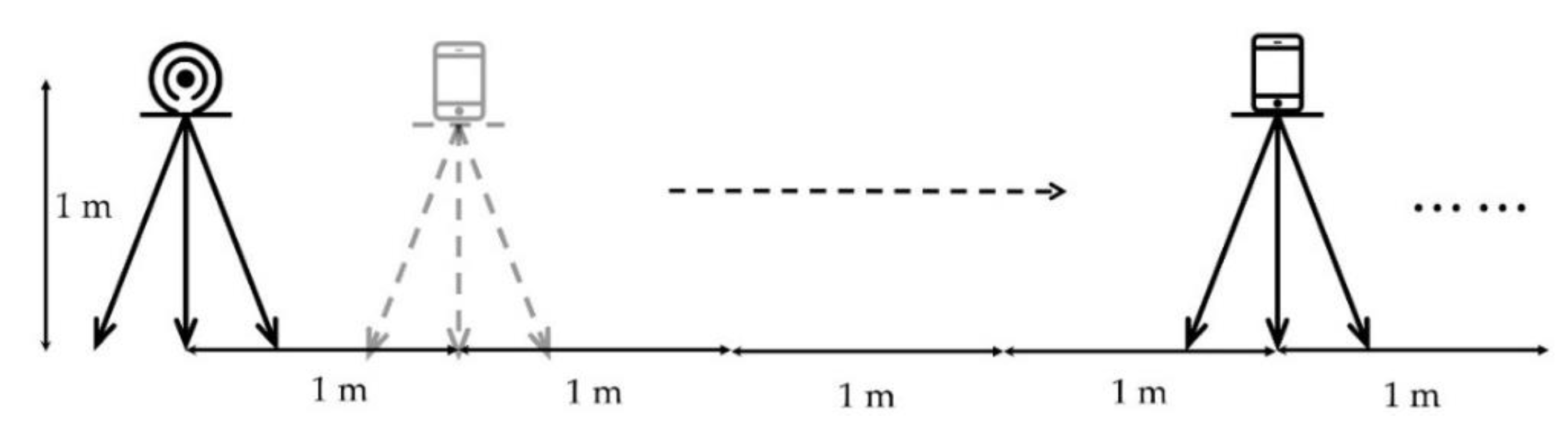
3.2. Spatial Resolution of BLE RSSI
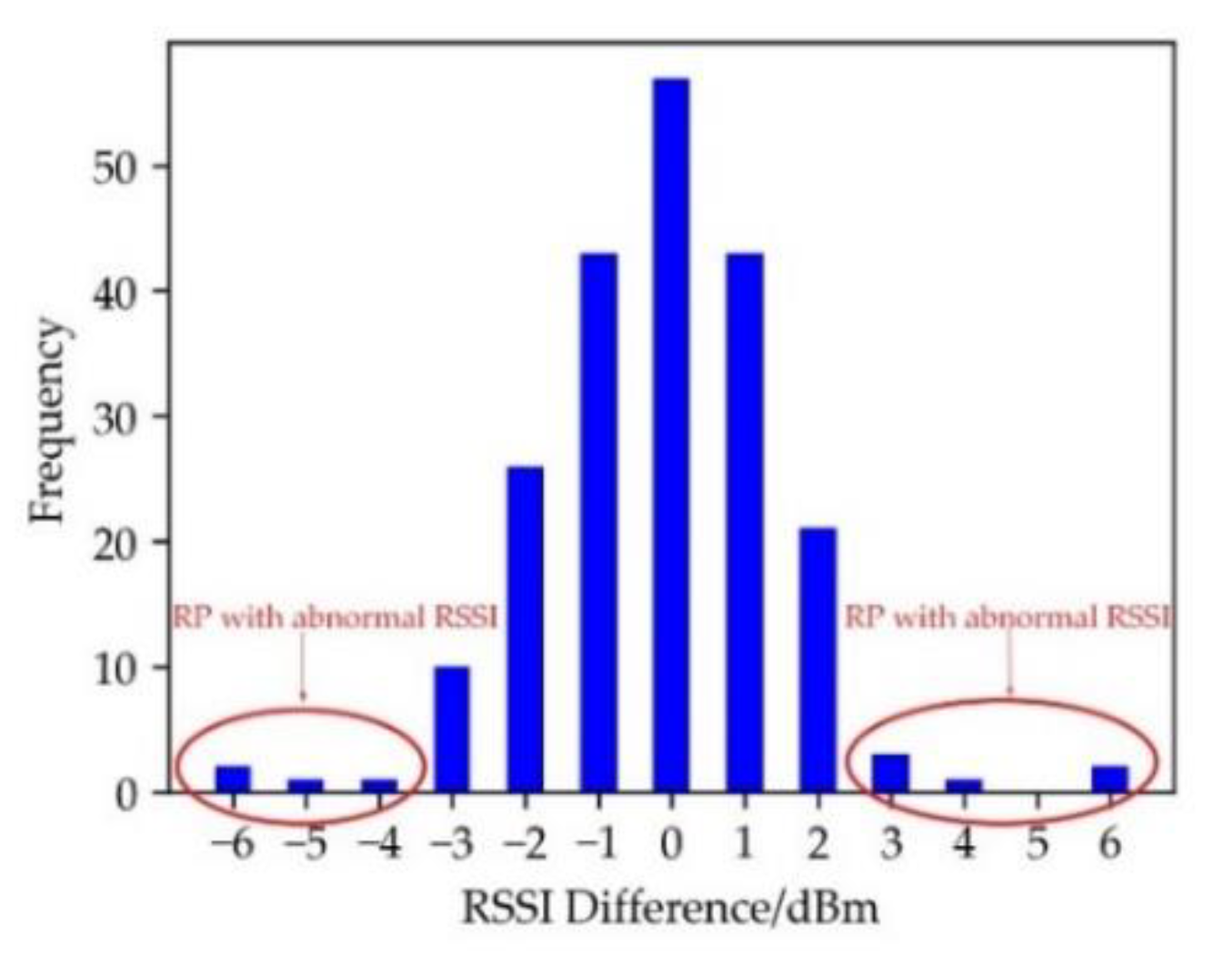
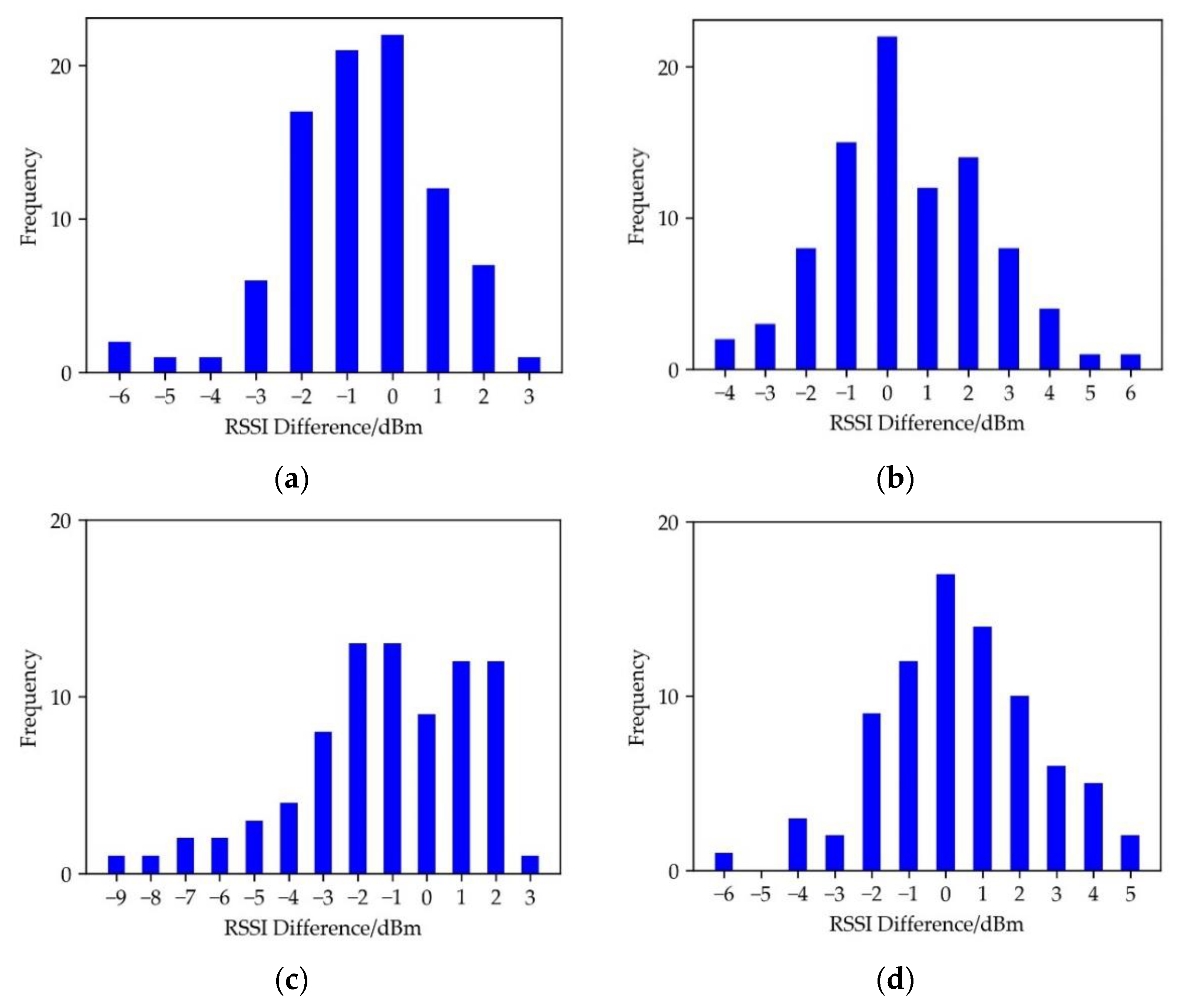
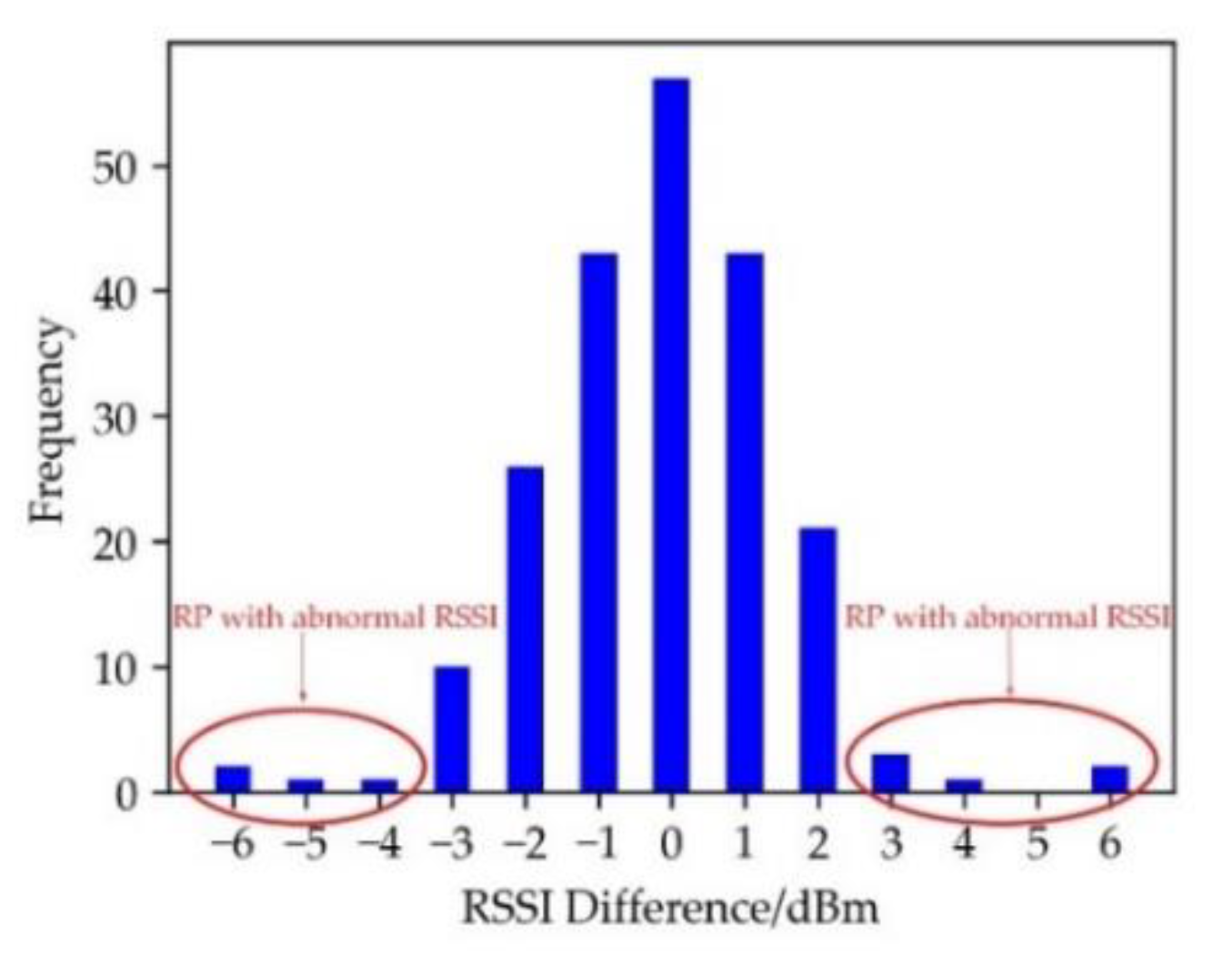
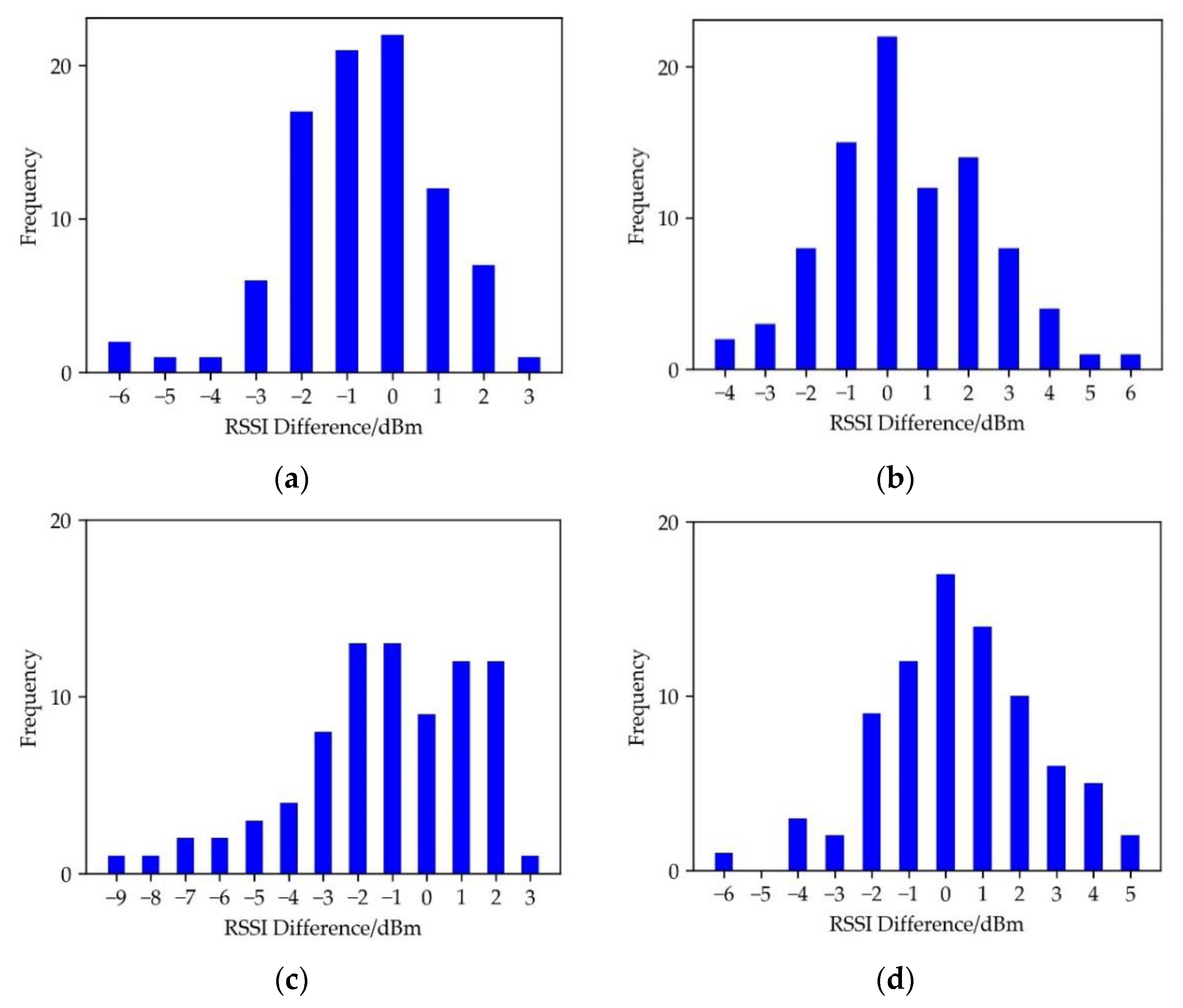
3.3. Correlation of Spatial RSSI Fingerprint
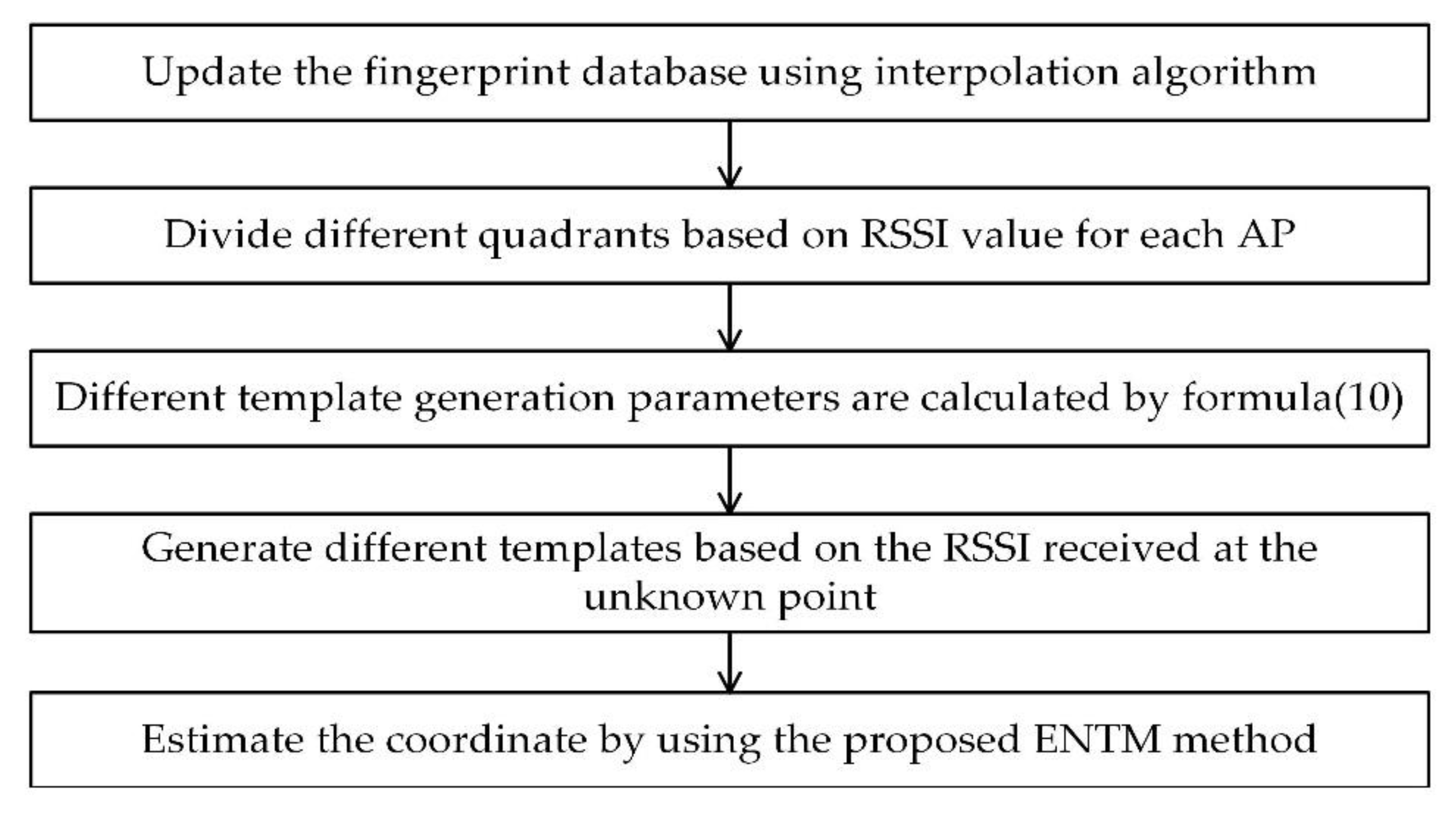
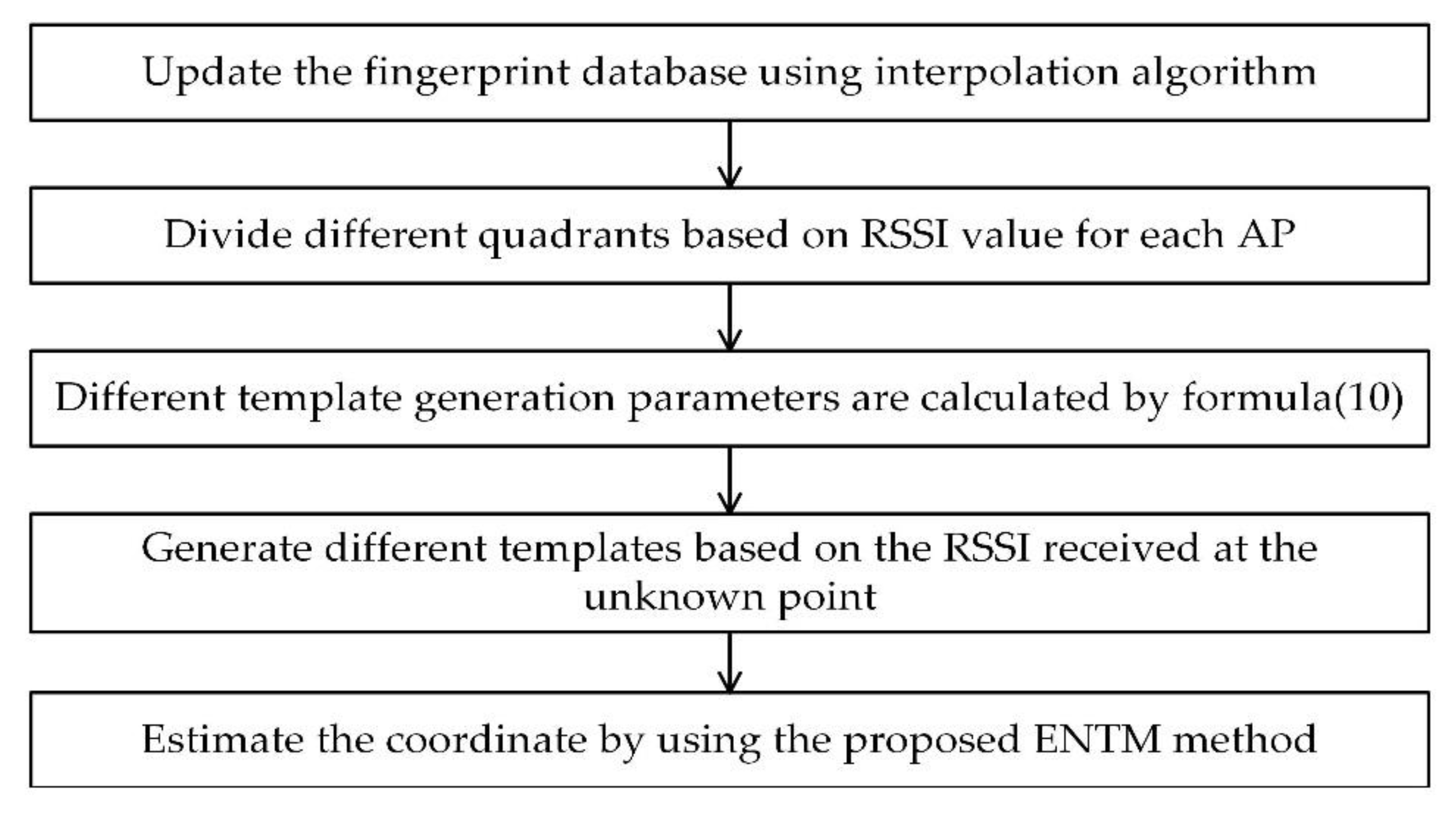
3.4. ENTM Algorithm
4. Experiment and Analysis of Its Result
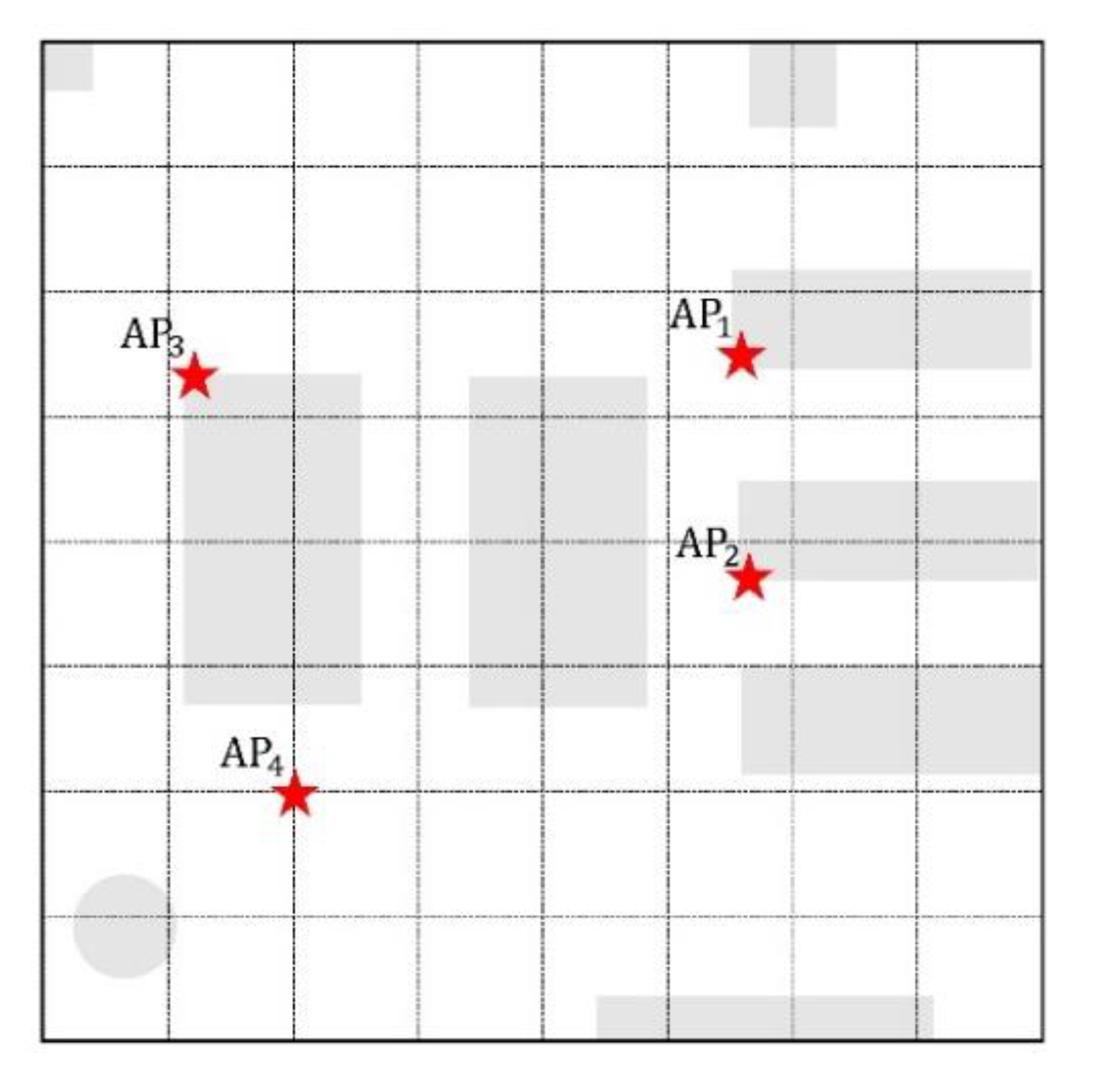
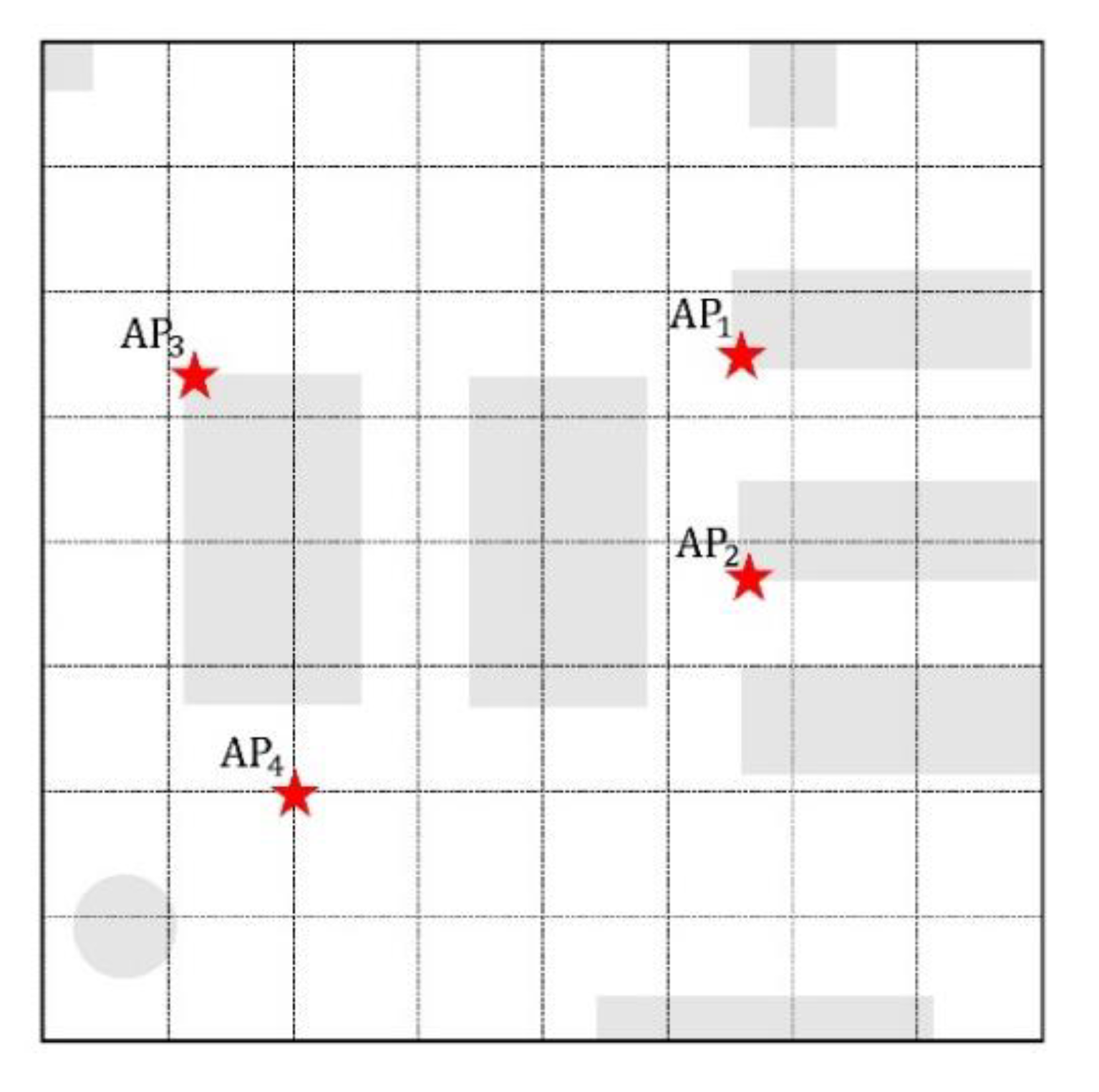
4.1. The Environment of Experiment
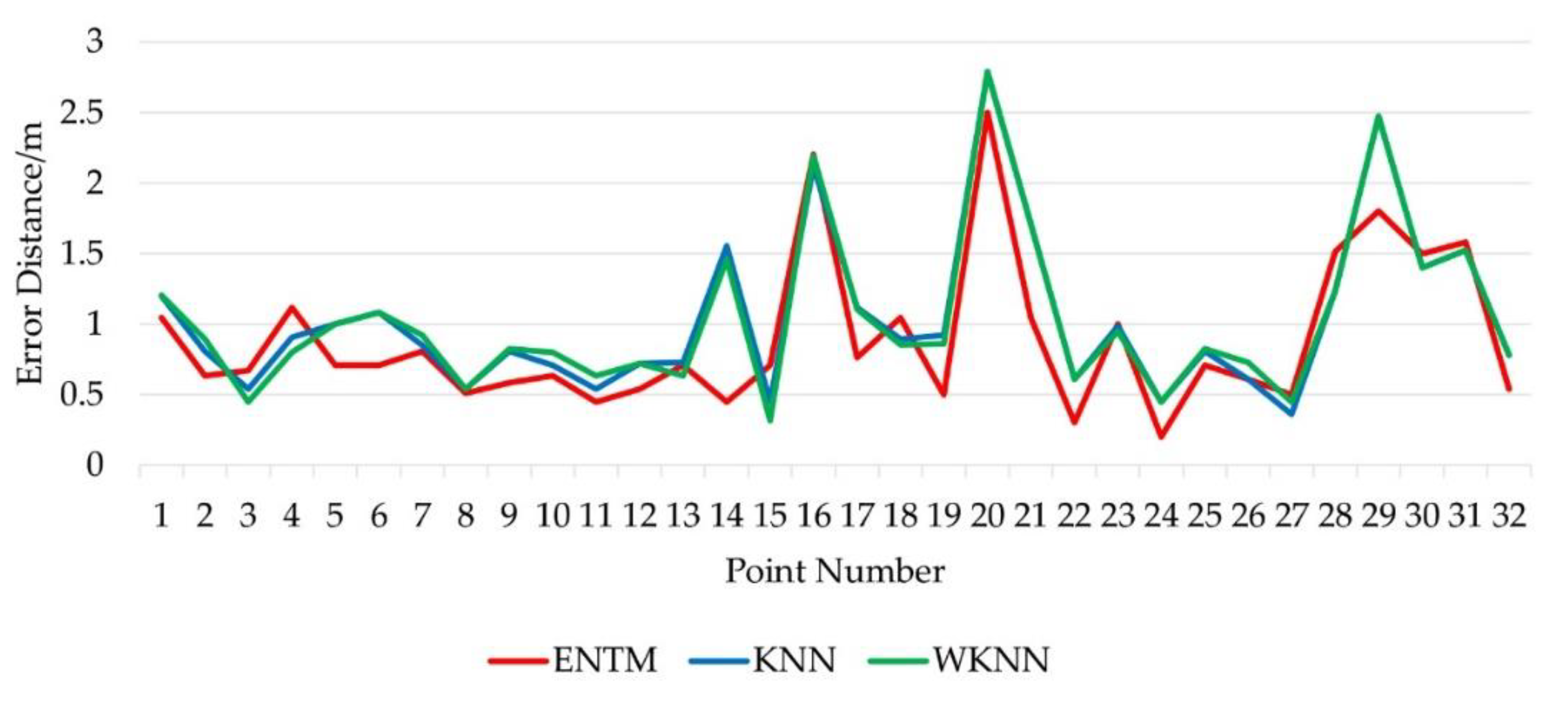
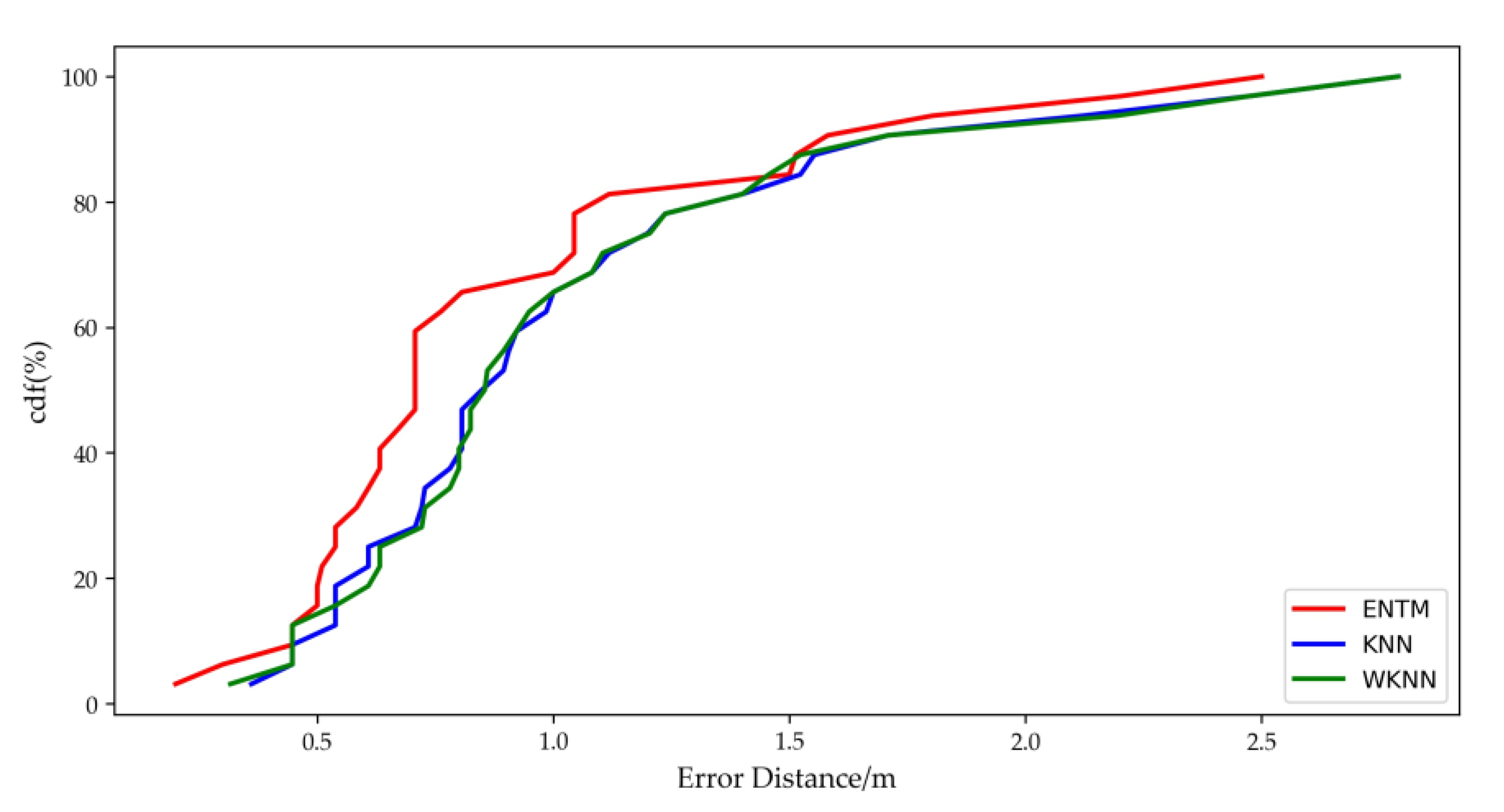
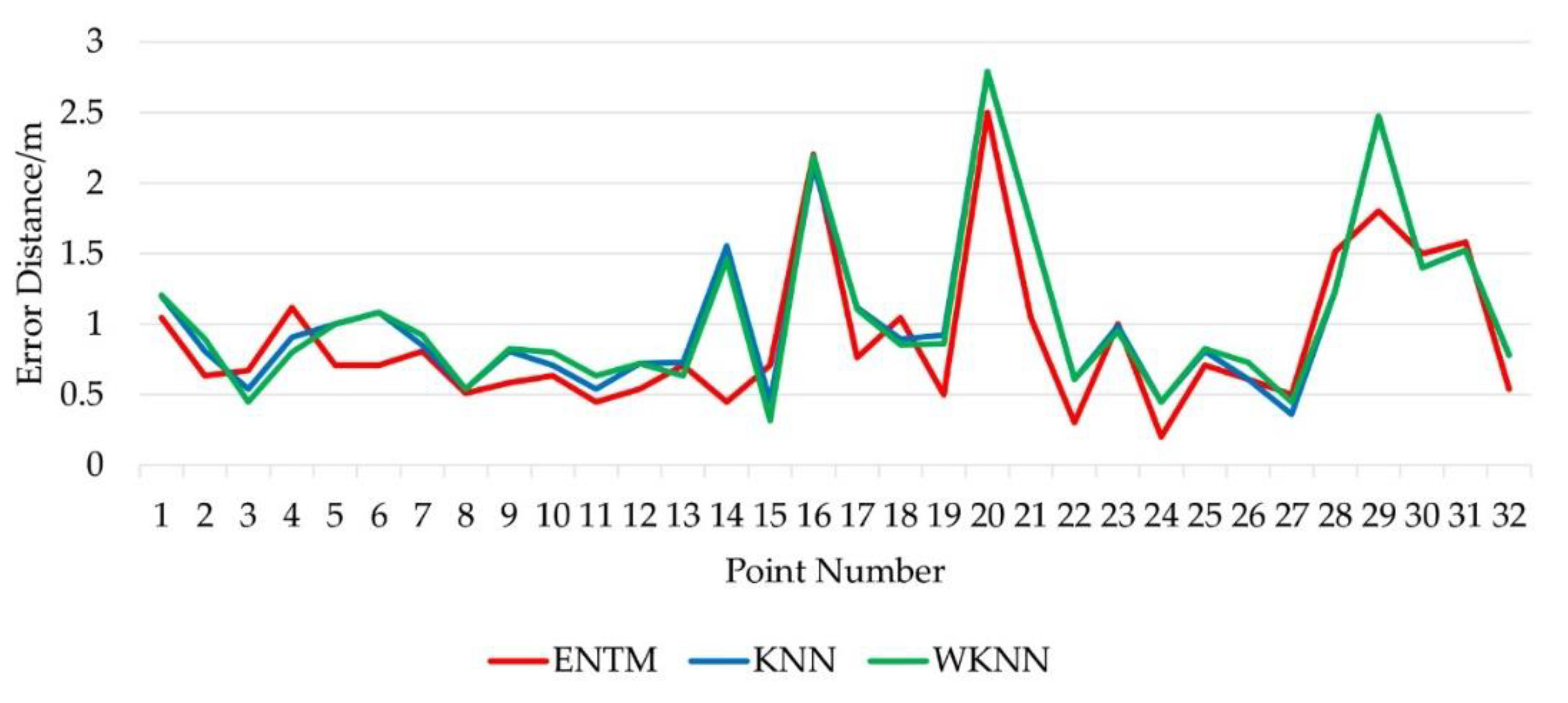
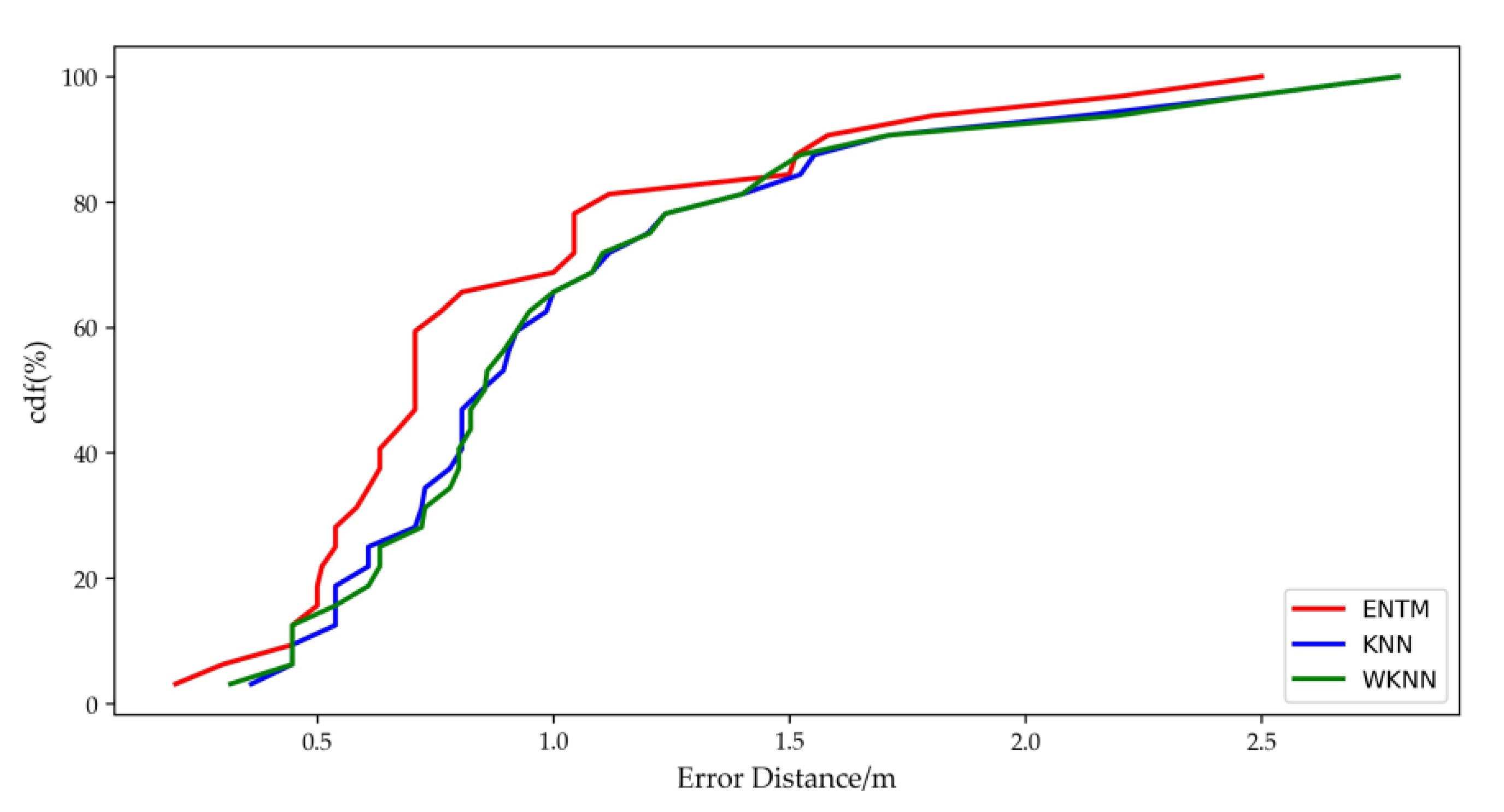
4.2. Comparison of Locating Accuracy
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern. Part. C Appl. Rev. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Brimicombe, A.; Li, C. Location-Based Services and Geo-Information Engineering; John Wiley Sons: Hoboken, NJ, USA, 2009; Volume 21. [Google Scholar]
- Huh, J.-H.; Seo, K. An indoor location-based control system using bluetooth beacons for IoT systems. Sensors 2017, 17, 2917. [Google Scholar] [CrossRef] [PubMed]
- Zou, H.; Jiang, H.; Luo, Y.; Zhu, J.; Lu, X.; Xie, L. BlueDetect: An iBeacon-enabled scheme for accurate and energy-efficient indoor-outdoor detection and seamless location-based service. Sensors 2016, 16, 268. [Google Scholar] [CrossRef] [PubMed]
- Zhuang, Y.; Yang, J.; Li, Y.; Qi, L.; El-Sheimy, N. Smartphone-based indoor localization with bluetooth low energy beacons. Sensors 2016, 16, 596. [Google Scholar] [CrossRef] [PubMed]
- Zhou, S.; Pollard, J.K. Position measurement using bluetooth. IEEE Trans. Consum. Electron. 2006, 52, 555–558. [Google Scholar] [CrossRef]
- Yang, C.; Shao, H.-R. WiFi-based indoor positioning. IEEE Commun. Mag. 2015, 53, 150–157. [Google Scholar] [CrossRef]
- Deng, Z.-A.; Hu, Y.; Yu, J.; Na, Z. Extended kalman filter for real time indoor localization by fusing WiFi and smartphone inertial sensors. Micromachines 2015, 6, 523–543. [Google Scholar] [CrossRef]
- Tiemann, J.; Schweikowski, F.; Wietfeld, C. Design of an UWB indoor-positioning system for UAV navigation in GNSS-denied environments. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Calgary, AB, Canada, 13–16 October 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–7. [Google Scholar]
- Niu, Q.F.; Cao, Y.F.; Wang, L.; Hui, Y.B. Study of UWB indoor positioning technology and optimization algorithm based on TW-TOF. Autom. Instrum. 2018, 11, 93–99. [Google Scholar]
- Shi, G.; Ming, Y. Survey of indoor positioning systems based on ultra-wideband (UWB) technology. In Wireless Communications, Networking and Applications; Springer: Berlin, Germany, 2016; pp. 1269–1278. [Google Scholar]
- Xiao, C.; Yang, D.; Chen, Z.; Tan, G. 3-D BLE indoor localization based on denoising autoencoder. IEEE Access 2017, 5, 12751–12760. [Google Scholar] [CrossRef]
- Xi, R.; Li, Y.; Hou, M. Survey on indoor localization. Comput. Sci. 2016, 43, 1–6, 32. [Google Scholar]
- Fang, S.H.; Lin, T.N. Projection-based location system via multiple discriminant analysis in wireless local area networks. IEEE Trans. Veh. Technol. 2009, 58, 5009–5019. [Google Scholar] [CrossRef]
- Zhao, P.; Chen, J. A study on localization algorithm using existing wireless local area network. J. Signal Process. 2014, 30, 1413–1418. [Google Scholar]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the IEEE INFOCOM 2000, Conference on Computer Communications, Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies (Cat. No.00CH37064), Tel Aviv, Israel, 26–30 March 2000; IEEE: Piscataway, NJ, USA, 2000; Volume 2, pp. 775–784. [Google Scholar]
- Kukolj, D.; Vuckovic, M.; Pletl, S. Indoor Location Fingerprinting Based on Data Reduction. In Proceedings of the International Conference on Broadband Wireless Computing, Barcelona, Spain, 26–28 October 2011. [Google Scholar]
- Li, H.L.; Qian, Z.H.; Tian, H.L. Research on indoor localization algorithm based on kernel principal component analgsis. J. Commun. 2017, 38, 158–167. [Google Scholar]
- Bi, J.X.; Wang, Y.J.; Cao, H.J.; Wang, Y.K. A method of WiFi indoor positioning based on omnidirectional fingerprint database. Bull. Surv. Mapp. 2018, 44, 25–29. [Google Scholar]
- Liu, H.; Ma, J.; Huang, Q. Construction method of fingerprint databased on improved Kriging interpalation for indoor location. J. Chongqing Univ. Posts Telecommun. Sci. Ed. 2017, 29, 751–757. [Google Scholar]
- Krishnakumar, A.S.; Krishnan, P. On the accuracy of signal strength-based location estimation techniques. In Proceedings of the IEEE 24th Annual Joint Conference of the IEEE Computer and Communications Societies, Miami, FL, USA, 13–17 March 2005; IEEE: Piscataway, NJ, USA, 2005; Volume 1, pp. 642–650. [Google Scholar]
- Yousef, N.R.; Sayed, A.H.; Jalloul, L.M.A. Robust wireless location over fading channels. IEEE Trans. Veh. Technol. 2003, 52, 117–126. [Google Scholar] [CrossRef]
- Zhang, L.; Tan, T.; Gong, Y.; Yang, W. Fingerprint database reconstruction based on robust PCA for indoor localization. Sensors 2019, 19, 2537. [Google Scholar] [CrossRef]
- Zeev, B.; Zeev, V.; Akteke-Öztürk, B.; Weber, G.-W. On minimal spanning tree approach in the cluster validation problem. Informatica 2009, 20, 187–202. [Google Scholar]
- Liang, L.H.; Ai, H.Z.; Xiao, X.P.; Ye, H.J.; Xu, G.Y.; Zhang, B. Face detection based on template matching and support vector machines. Chin. J. Comput. 2002, 25, 22–29. [Google Scholar]
- Qu, Y.; Cheng, Y.; Qiu, L. An improved method of extracting 3D features of buildings based on eight neighborhood search method. J. Air Force Eng. Univ. Nat. Sci. Ed. 2015, 16, 66–69. [Google Scholar]
- Wang, B.; Zhou, S.; Liu, W.; Mo, Y. Indoor localization based on curve fitting and location search using received signal strength. IEEE Trans. Ind. Electron. 2015, 62, 572–582. [Google Scholar] [CrossRef]
- Salo, J.; Vuokko, L.; El-Sallabi, H.M.; Vainikaine, P. An additive model as a physical basis for shadow fading. IEEE Trans. Veh. Technol. 2007, 56, 13–26. [Google Scholar] [CrossRef]
- Röbesaat, J.; Zhang, P.; Abdelaal, M.; Theel, O. An improved BLE indoor localization with kalman-based fusion: An experimental study. Sensors 2017, 17, 951. [Google Scholar] [CrossRef] [PubMed]
- Weber, G.-W.; Özöğür-Akyüz, S.; Kropat, E. A review on data mining and continuous optimization applications in computational biology and medicine. Birth Defects Res. 2009, 87, 165–181. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.H.; Zhang, T.T. Analysis of influence factors of electric geothermal indoor temperature based on multivariate adaptive regression spline. Sci. Technol. Eng. 2018, 18, 200–206. [Google Scholar]
- Weber, G.-W.; Batmaz, İ.; Köksal, G.; Taylan, P.; Yerlikaya-Özkurt, F. CMARS: A new contribution to nonparametric regression with multivariate adaptive regression splines supported by continuous optimization. Inverse Probl. Sci. Eng. 2012, 20, 371–400. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | (m) | ||
|---|---|---|---|
| 1 | 0.5 | −63.08 | / |
| 2 | 1.0 | −66.88 | 3.80 |
| 3 | 1.5 | −69.10 | 2.22 |
| 4 | 2.0 | −70.68 | 1.58 |
| 5 | 2.5 | −71.91 | 1.23 |
| 6 | 3.0 | −72.91 | 1 |
| 7 | 3.5 | −73.75 | 0.84 |
| 8 | 4.0 | −74.48 | 0.73 |
| 9 | 4.5 | −75.13 | 0.65 |
| 10 | 5.0 | −75.71 | 0.58 |
| 11 | 5.5 | −76.23 | 0.52 |
| 12 | 6.0 | −76.71 | 0.48 |
| 13 | 6.5 | −77.15 | 0.44 |
| 14 | 7.0 | −77.55 | 0.40 |
| 15 | 7.5 | −77.93 | 0.38 |
| 16 | 8.0 | −78.27 | 0.34 |
| Algorithm | RMSE (m) | Improved (%) | 80th (m) | Improved (%) |
|---|---|---|---|---|
| K-nearest neighbor (KNN) | 1.2 | 0 | 1.4 | 0 |
| Weighted K-nearest neighbor (WKNN) | 1.2 | 0 | 1.4 | 0 |
| ENTM | 1.0 | 16.7 | 1.1 | 21.4 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Zhao, L.; Tan, D.; Tong, X. BLE Fingerprint Indoor Localization Algorithm Based on Eight-Neighborhood Template Matching. Sensors 2019, 19, 4859. https://doi.org/10.3390/s19224859
Li M, Zhao L, Tan D, Tong X. BLE Fingerprint Indoor Localization Algorithm Based on Eight-Neighborhood Template Matching. Sensors. 2019; 19(22):4859. https://doi.org/10.3390/s19224859
Chicago/Turabian StyleLi, Mingfeng, Lichen Zhao, Ding Tan, and Xiaozhe Tong. 2019. "BLE Fingerprint Indoor Localization Algorithm Based on Eight-Neighborhood Template Matching" Sensors 19, no. 22: 4859. https://doi.org/10.3390/s19224859
APA StyleLi, M., Zhao, L., Tan, D., & Tong, X. (2019). BLE Fingerprint Indoor Localization Algorithm Based on Eight-Neighborhood Template Matching. Sensors, 19(22), 4859. https://doi.org/10.3390/s19224859