1. Introduction
Recent years have seen the rapid development of wireless network technology, and people are demanding more effective and more precise services. Indoor localization is definitely one of them. Compared to outdoor localization, which mostly resorts to Global Positioning System (GPS) to implement an application, indoor localization, because of the environmental factors like multipath effects, shadowing, and fading, is a much more challenging task. Researchers have proposed different approaches to performing an indoor localization task, aiming to achieve higher accuracy. Most of the existing approaches are device-based, which have a major drawback that the target needs to equip itself with a certain device in advance. However, in some cases, it is unreasonable to require the subject to carry any devices. For example, in an intrusion detection and localization application, intruders will not equip themselves with devices to communicate with the central system, making the device-based approaches inapplicable.
To overcome the problems existing in device-based localization, Youssef et al. [
1] introduced the concept of device-free localization (DFL), which eliminates the need to have any device attached to a target and merely requires the wireless network to be deployed around the environment to sense the target. Since then, DFL has gradually become the focus of indoor localization, and a lot of approaches have been presented. Among them, fingerprinting-based approaches are one of the most popular kinds. A fingerprinting-based approach consists of an offline phase and an online phase. The offline phase focuses on constructing a radio map that stores the fingerprints of reference locations, whereas the online phase aims to estimate a target’s location by comparing the newly collected measurements with the radio map. For example, Seifieldin et al. [
2] presented Nuzzer, which utilizes Received Signal Strength Indication (RSSI) from different data streams to construct the radio map as histograms. Xu et al. [
3] determined a target’s location through classification by incorporating a probability-based approach and discriminant analysis. However, these approaches are based on RSSI, which is easy to retrieve with low hardware cost but values of which are susceptible to the multipath effect. RSSI has strong innate variability, causing its value to fluctuate over time. Furthermore, RSSI is rather coarse-grained, because it merely uses an integer value to represent the quality of a communication link. Channel State Information (CSI)—a kind of information extracted from the physical layer—is based on Orthogonal Frequency Division Multiplexing (OFDM), which transmits data through different subcarriers. Therefore, CSI can characterize the quality of a communication link with multiple values, which has more fined granularity than RSSI. Through the use of CSITOOL [
4], CSI can be easily retrieved from an Intel 5300 wireless card. Recently, there have been some applications on DFL adopting CSI as the basic measurements. For example, Xiao et al. [
5] proposed a system to construct the radio map using the stability of CSI, and they adopt a kernel-density based approach to determine the location of a target. Zhou et al. [
6] utilized Support Vector Machine (SVM) to establish the dependency relationship between the CSI amplitudes and the target’s location. Most of the existing CSI-based DFL approaches either merely use the CSI amplitudes or phases to construct fingerprints, or only adopt one antenna to collect measurements, potentially discarding a large portion of useful information. Furthermore, at the online phase, they tend to compare one sample each time with the radio map to localize the target, neglecting the information among successive samples within a period.
In this study, we present a novel approach that not only incorporates the CSI measurements of multiple communication links but also exploits the uncertainty information among successive samples, which is embodied by a probability distribution, to implement indoor localization. The proposed approach can utilize the CSI amplitudes or phases to localize a target with Kullback–Leibler divergence (KL-divergence). Also, it can simultaneously utilize the information of the CSI amplitudes and phases.
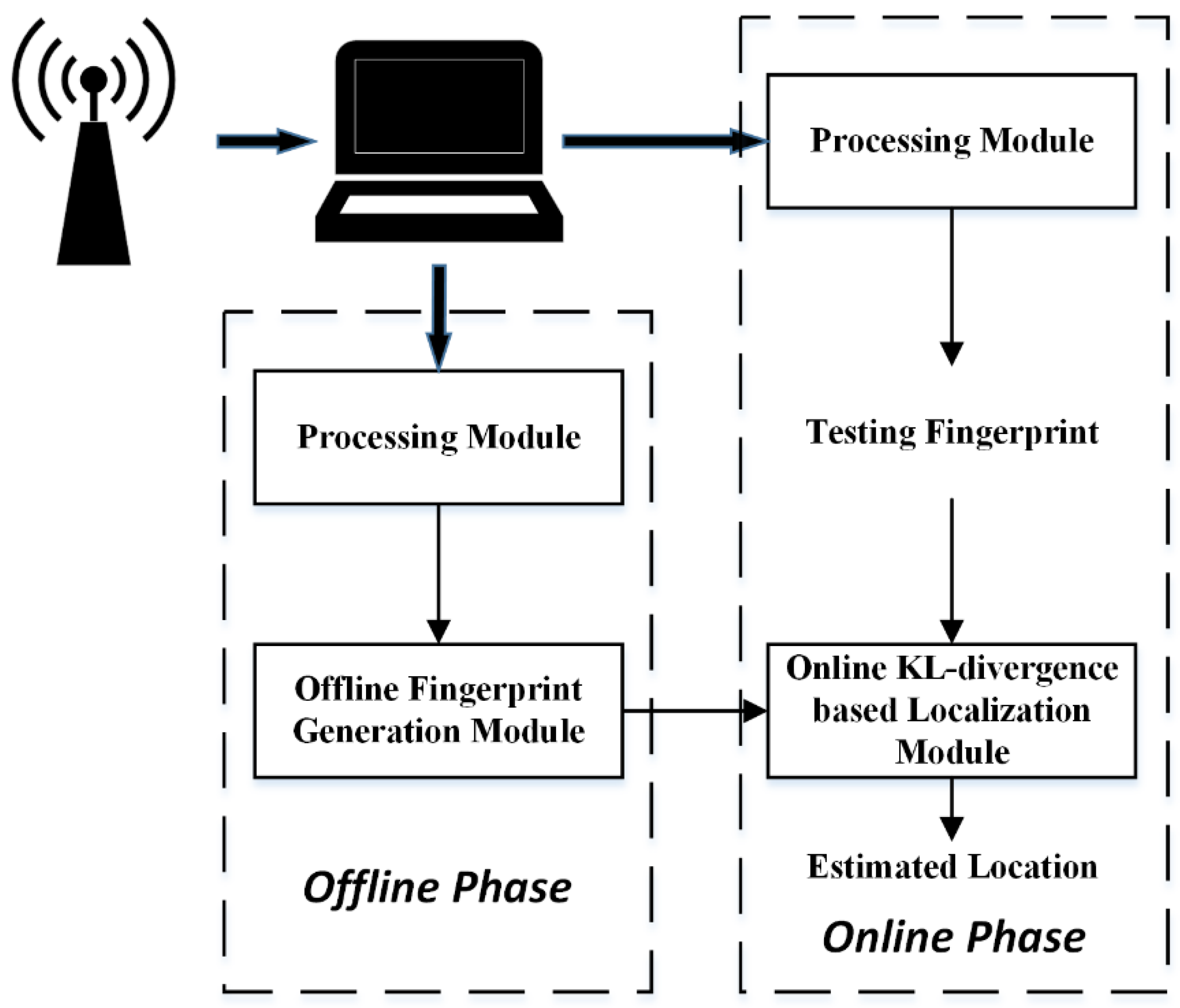
Specifically, we perform four statistical analyses to explore the characteristics of CSI. We then introduce the proposed approach, which is composed of a communal processing module, an offline fingerprint generation module, and an online KL-divergence based localization module. The part of the work of the processing module is to sanitize the raw CSI phases with a linear transformation to make sure they are usable. Furthermore, we model the CSI amplitudes and sanitized phases of all the subcarriers within a communication link as multivariate Gaussian distributions. Therefore, we need to estimate the mean vectors and covariance matrices of them. The processing module plays that role and also handles the problem with non-invertible situations occurring in the parameter estimation process. The offline fingerprint generation module receives the estimated parameters at the offline phase from the processing module and then records them as the reference fingerprints to form a radio map. The online KL-divergence based localization module is aimed to compare the fingerprints of a target estimated at the online phase with the radio map to localize the target by utilizing KL-divergence. Moreover, the proposed approach can process three different types of fingerprints, i.e., the amplitude fingerprints, the phase fingerprints, and the combined fingerprints, which are the combination of the amplitude fingerprints and the phase fingerprints.
We conduct extensive experiments in two typical indoor environments, a corridor and laboratory room, to demonstrate the effectiveness of the proposed approach. The results show that the proposed approach, using whatever type of fingerprints, achieves better performance than CSI-based Pilot and RSSI-based Nuzzer. In addition, we also explore the sensitivity of different parameters to the localization performance.
The rest of this paper is organized as follows.
Section 2 presents some reviews about existing works on indoor localization.
Section 3 articulates relevant preliminaries of this study. We present in
Section 4 some characteristics of the CSI amplitudes and phases based on statistical tests.
Section 5 introduces the structure of the proposed approach. In
Section 6, we show the results of the proposed approach and the effects of different parameters on localization accuracy. Finally, we conclude the paper in
Section 7.
4. Statistical Analyses
In this section, we analyze the characteristics of the CSI amplitudes and sanitized phases using several statistical tests, which we can use to support the proposed approach.
4.1. Analysis 1
As we have presented above, the CSI sanitized phases are more concentrated, but we can see that they still fluctuate, meaning there is uncertainty over consecutive samples. Furthermore, we notice there are certain patterns over the uncertainty, which can be characterized by probability distributions. Therefore, in this part, we try to figure out what distribution the CSI sanitized phases approximately exhibit when no target or a target is standing still in a monitoring area, and we use statistical experiments to demonstrate that the Gaussian distribution is a possible candidate.
To test if the sanitized phases of a subcarrier can be modeled as a Gaussian distribution, we perform a Shapiro–Wilk test in an indoor environment. The Shapiro-Wilk test is a kind of normality test, which presents a hypothesis that the data for testing obey a Gaussian distribution, and there is a value
denoting whether we should reject the hypothesis. Generally, if
is greater than a threshold, we have no reason to reject the hypothesis. In this study, we hold that if
is greater than 0.05, we cannot reject the hypothesis, so in this case, for simplicity, we are forced to accept the hypothesis. We present a variable to indicate whether or not to reject the hypothesis, written as
where the value of
is either 0 or 1. 0 denotes that the hypothesis is not rejected and 1 means it is rejected.
We first perform the normality test when the monitoring area is empty, meaning that no target is present in the area. We define a rejection ratio
to indicate the proportion of subcarriers that are rejected, written as:
where
is the
value of the subcarrier
i,
is the total number of subcarriers in a communication link. We collect 50 consecutive samples at five different moments respectively and adopted the average of their rejection ratios as the final result, which is shown in
Table 1. We can see that the value of
is 0.0556, meaning that when there is no target in the monitoring area, the sanitized phases of over 94% of the subcarriers are not rejected.
Next, we conducted experiments when the target was present in the monitoring area. We modify the original rejection ratio as follows to measure the overall level of how many subcarriers are rejected in this area:
where
is the rejection ratio of the location
,
is the total number of locations. Also, we tested at five different moments, and adopted the average value of them for verification. According to
Table 1, we can see that the value of
is 0.1235, indicating that over 87% of the subcarriers are not rejected.
By comparing the results tested in the two conditions, it is easy to see that when the monitoring area was empty of the target, the rejection ratio is lower than that when the target stood in the area. This may be caused by the combined effects of the environment and the target. There are generally noises in the environments, which will cause unexpected fluctuations to the signal. Also, the target, which is the human body in this study, will further introduce noises to the signal. Therefore, the combined effects of them may raise the rejection ratio to a higher level.
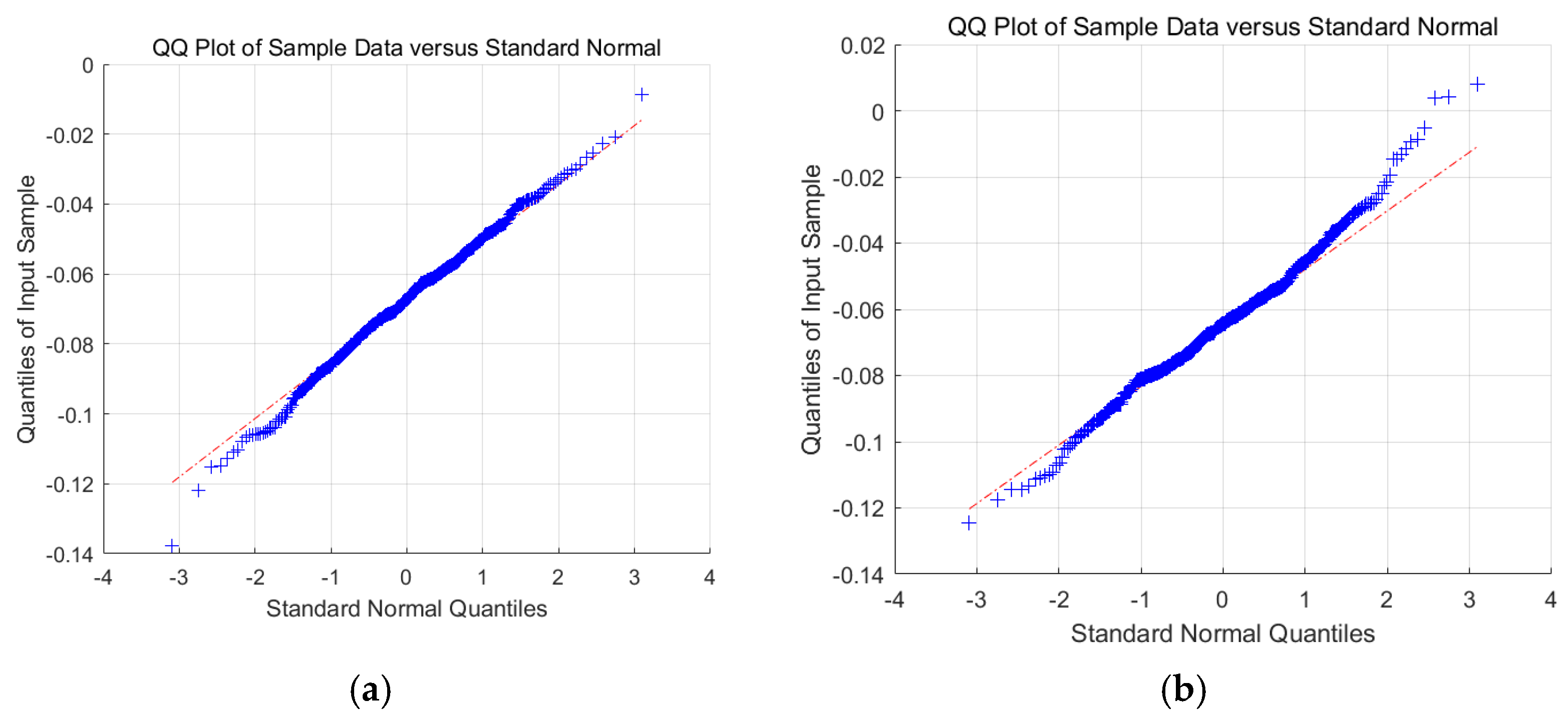
We only use 50 consecutive samples to perform Shapiro–Wilk test, and for the situations with more consecutive samples, we use quantile–quantile plot (QQ-plot) to perform the test. We only show the results of a subcarrier because the results of different subcarriers are similar to one another. According to
Figure 2, we can see that when the area is empty of the target, almost all the points follow along the straight line, with few of them far from the line. This phenomenon reveals that we can model the sanitized phases of this subcarrier as a Gaussian variable with great confidence. However, when the target is present in the area, the points at the upper right part start to tip away, but most of the points still stick to the straight line. In this situation, when having high acceptability, we can still consider the sanitized phase of this subcarrier as an approximately Gaussian variable.
According to the results, we consider that the CSI sanitized phase of a subcarrier can be modeled as an approximately Gaussian variable when there is no target or a target standing still in a monitoring area.
4.2. Analysis 2
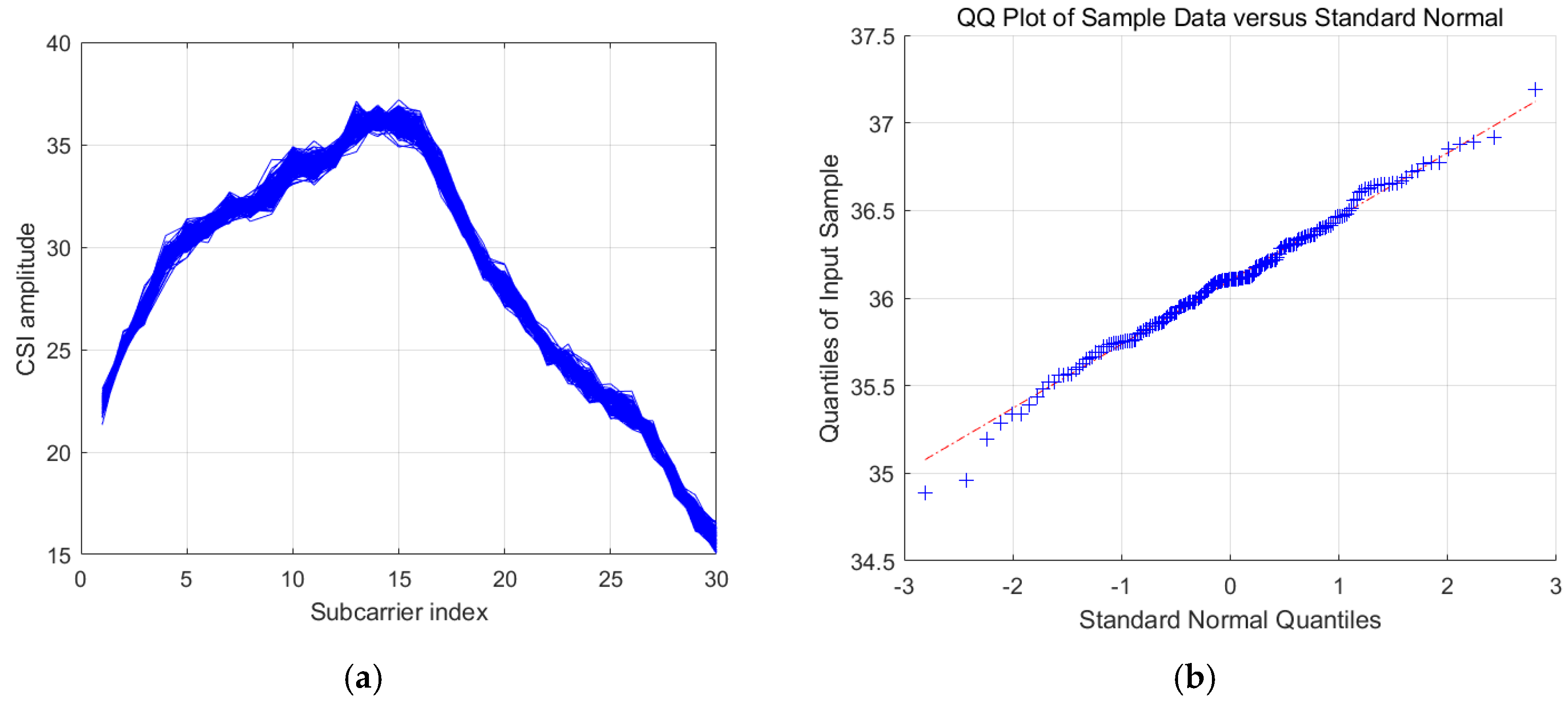
In this part, we explore the distribution of the CSI amplitudes. In comparison to the CSI sanitized phases, CSI amplitudes do not have stable uncertainty patterns we can capture. Sometimes, they exhibit an approximately Gaussian distribution, whereas other times they do not. According to
Figure 3a, we can see that the CSI amplitudes from a sequence of consecutive samples are considerably close to one another, finally forming a cluster. In
Figure 3b, we show the QQ-plot of the CSI amplitudes of the 15th subcarrier, where we can see that the CSI amplitudes of this subcarrier can be approximately modeled as a Gaussian distribution. However, as shown in
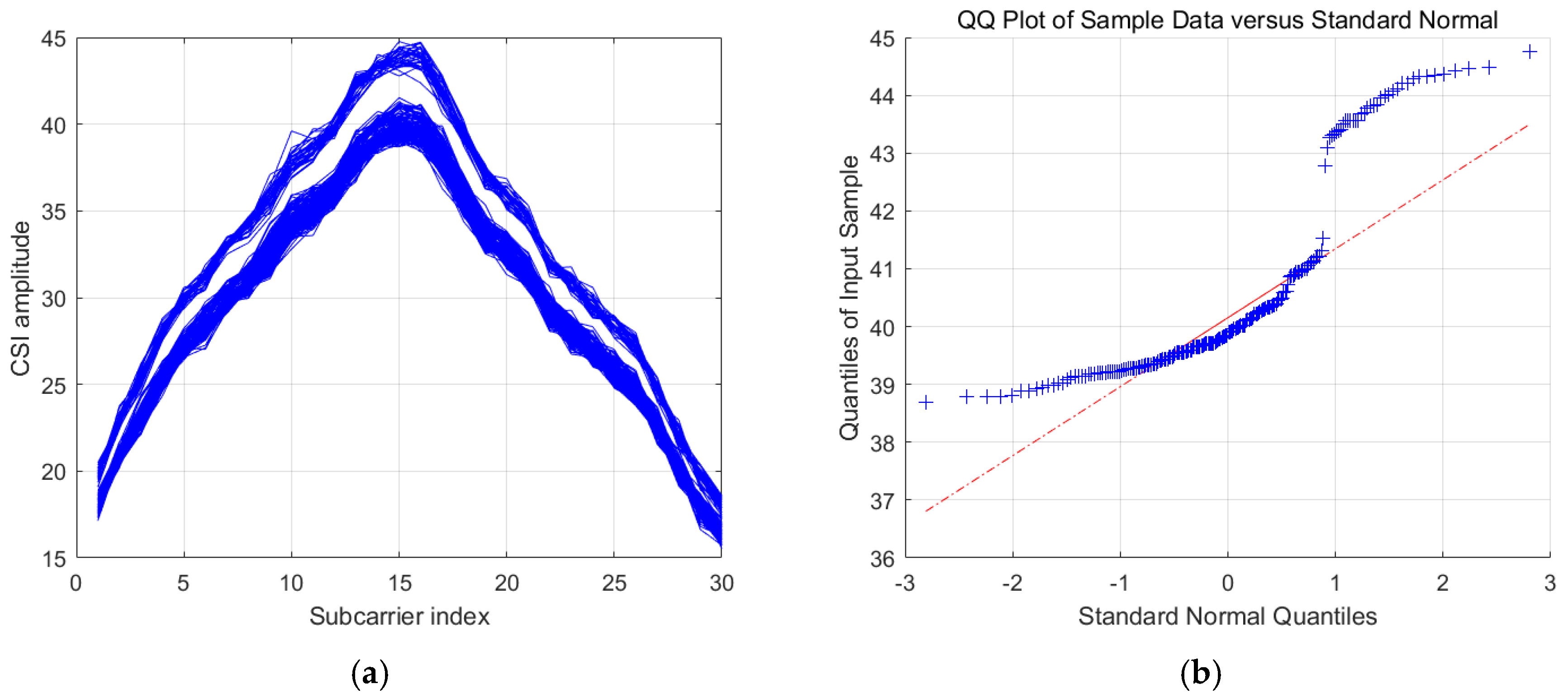
Figure 4a, we can see a situation where the CSI amplitudes display another form of distribution with two clusters. Furthermore,
Figure 4b shows the QQ-plot of the CSI amplitudes of the 15th subcarrier, where we can conclude that the CSI amplitudes of this subcarrier cannot be modeled as a Gaussian distribution.
In this study, to better utilize the information of the CSI amplitudes’ uncertainty without too much effort, we also model the CSI amplitudes of a subcarrier as a Gaussian distribution, which will simplify the consequent localization implementation.
4.3. Analysis 3
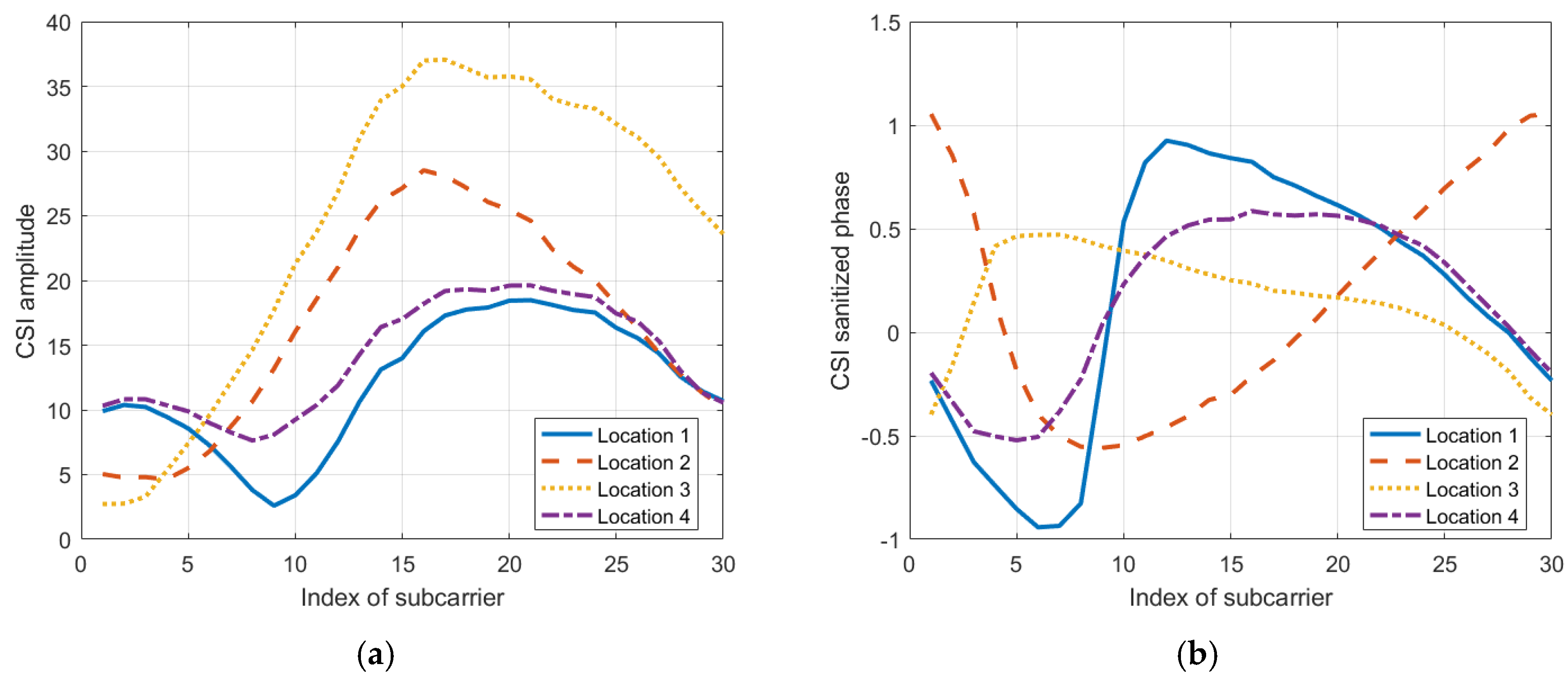
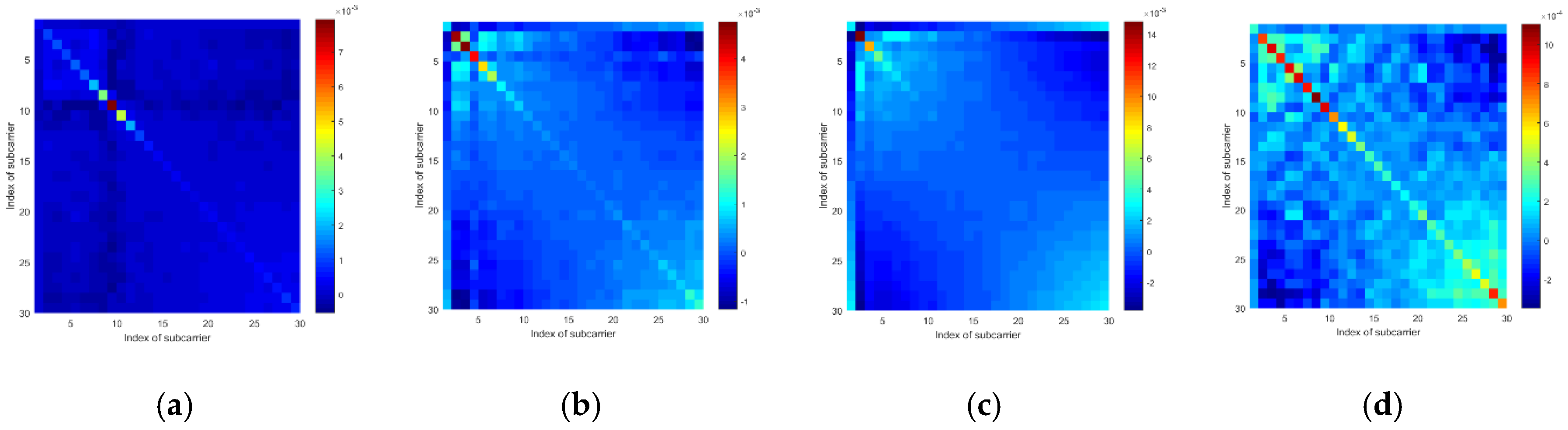
In this part, we conducted several experiments to explore the effects of a target’s location on the CSI amplitudes and sanitized phases of a communication link. Furthermore, to better illustrate these effects, we use the mean vector and the covariance matrix of the CSI amplitudes or phases of all the subcarriers from a communication link to show the results.
To examine if the target standing at different locations will lead the mean vectors and the covariance matrices to exhibit different patterns, we tested at four locations. Additionally, to eliminate the effects of the human body’s motions, we used a metal box to represent the target. According to
Figure 5, we can see that when the target locates at different positions, the mean vectors of the CSI amplitudes and the sanitized phases are generally different from one another. Also, according to
Figure 6 and
Figure 7, the covariance matrices at different locations display various patterns.
According to the results, we consider that the response of the CSI amplitudes and sanitized phases are affected by where a target stands, and therefore, the mean vectors and covariance matrices can be used to discriminate among locations.
4.4. Analysis 4
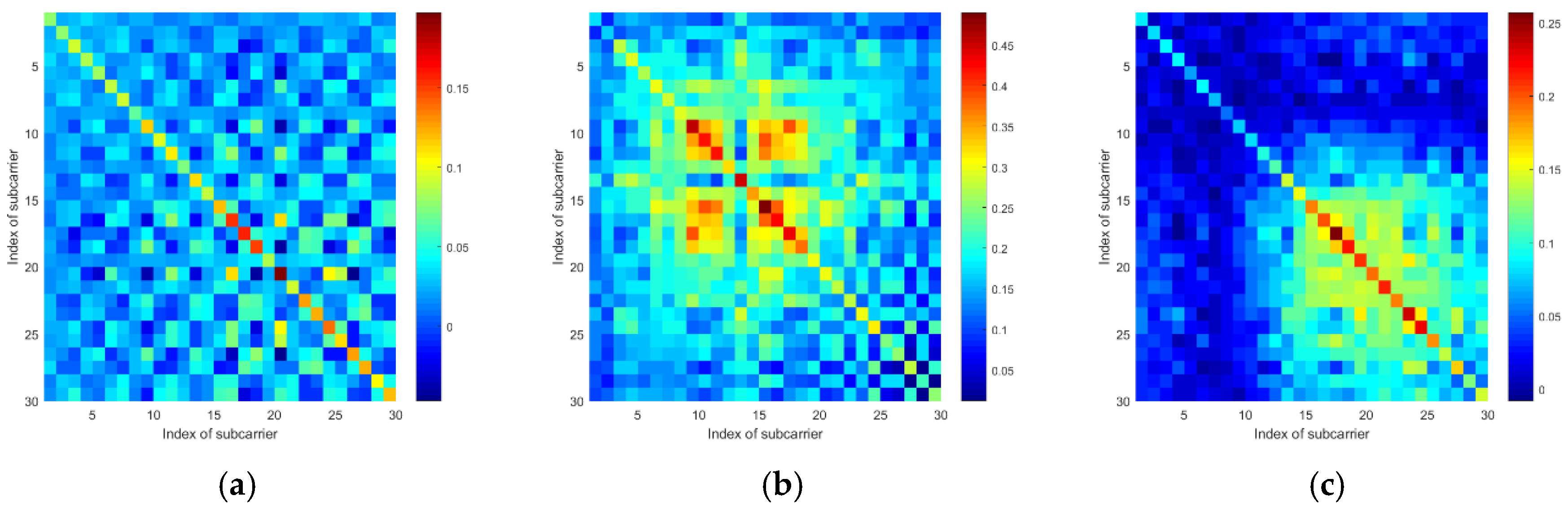
Because of the Multiple-Input Multiple-Output (MIMO) technology, we can transmit signals using multiple communication links, thus making it possible for us to exploit this technique to boost information. In this part, we look into the response of different communication links to the same environment context by exploring their mean vectors and covariance matrices.
According to
Figure 8, the mean vectors of the CSI amplitudes are rather different from one another, so are the mean vectors of the CSI sanitized phases. Moreover, as shown in
Figure 9 and
Figure 10, we can also see great differences in covariance matrices of different communication links for either the CSI amplitudes or the CSI sanitized phases.
According to these results, we consider that it is reasonable to incorporate multiple communication links to boost the information in the radio map, which may further improve localization accuracy.
6. Evaluation
6.1. Experimental Details
We implemented the proposed approach in two typical indoor environments to test its efficiency. In both scenarios, we adopt a scheme of one Access Point (AP) and one Monitor Point (MP). The AP is a TP-Link router, and the MP is an HP laptop installed with an intel 5300 wireless card. To collect the raw CSI measurements, we installed CSITOOL on the laptop. In this study, we collect 100 consecutive samples at each location to construct the fingerprints. For the proposed approach, we chose to use two communication links out of three to perform the localization task. For Pilot, only one antenna was selected. For Nuzzer, in the corridor testbed, we chose to use one communication link, and in the laboratory testbed, two communication links were selected. Furthermore, for a fair comparison, we also performed the weighted averaging, the same as the proposed approach, in Pilot, and when implementing Nuzzer, we used its continuous space estimator to average the reference locations.
We show the layout of the two scenarios in the
Figure 12, and the details of them are as follows:
Corridor: the corridor environment has a size of
, which has no obstacle in its area. However, the space of the monitoring area is fairly narrow, which may increase the effect of multipath. As is shown in
Figure 12a, there are a total of 30 reference locations and 18 testing locations uniformly distributed in the monitoring area.
Laboratory: as shown in
Figure 12b, the laboratory is composed of two rooms, which are divided by a screen. The size of the large one is about
, whereas the small one has an area of around
. This scenario is overwhelmed by extremely strong multipath effects and interventional signals, which may render the CSI measurements unstable.
The detailed configuration of the two scenarios are listed in
Table 2. The performance metric used in this paper is the mean distance error, which is
where
is the total number of the testing locations,
is the location estimate, and
is the ground truth.
6.2. Localization Performance
To test the performance of the proposed approach, we compared it with two different state-of-the-art systems, namely Pilot and Nuzzer. Also, we tested the proposed approach with different types of fingerprints.
The results of our experiments are listed in
Table 3. In the corridor environment, when adopting the combined fingerprints, the mean distance error of the proposed approach is 0.94665 m by using two communication links, and
and
are set to be 9 × 10
−4 and 3 × 10
−2. When merely using the CSI amplitude, with
set to be 3 × 10
−3, we obtain a worse result, which is 0.99716 m. For the situation where we only use the phase information, we obtain a localization error of 1.04339 m by setting
to be 3 × 10
−2. Pilot, in this case, achieves a localization error of 1.24999 m, whereas the proposed approach, whatever type of fingerprints is used, outperforms Pilot. Nuzzer, which exploits RSSI to perform localization, has a localization error of merely 1.46679 m, worse than the proposed approach and Pilot.
In the laboratory testbed, which is cluttered with office appliances, the multipath effect is very strong, making localization accuracy degraded. The proposed approach has a localization error of 1.34747 m when using the combined fingerprints, with and set to be 4 × 10−3 and 6 × 10−5. In comparison, when using merely the CSI amplitudes, the proposed approach has slightly worse performance, which is 1.35196 m with set to be 4 × 10−3. When only using the phase fingerprints, we set to be 5 × 10−3, finally achieving a localization error of 1.55726 m. The other two approaches, in this case, have poor performance, with Pilot to be 1.74823 m and Nuzzer 1.80899 m, both worse than the proposed approach.
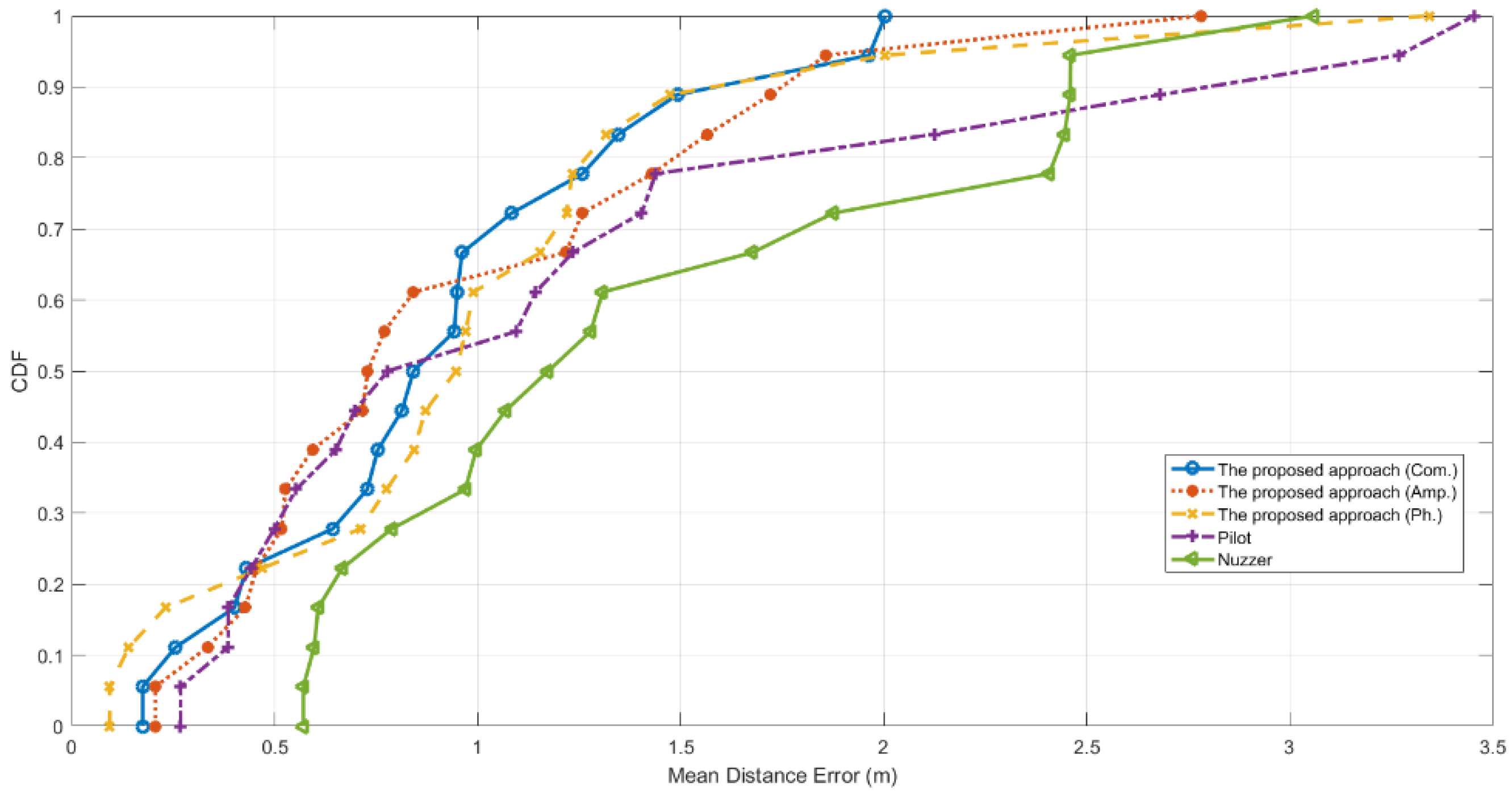
Figure 13 shows the Cumulative Distribution Function (CDF) of the distance error in the corridor scenario. In this testbed, Pilot and the proposed approach with the amplitude fingerprints make sure that 50% of the test locations have a localization error under 0.72 m. When using the CSI phase information, the proposed approach has 50% of the test locations under 0.9 m, and that value achieved by exploiting the combined fingerprints is 0.82 m. Nuzzer, in this case, merely achieves a result of 50% under 1.1 m. Furthermore, the proposed approach, with the phase fingerprints or the combined fingerprints, accomplishes that 80% of the test locations are well below 1.3 m. For the proposed approach using the amplitude information, 80% of the test locations have a localization accuracy of merely below 1.45 m, so does Pilot. Nuzzer has 80% of the test locations below 2.45 m, performing worse than the other CSI-based approaches.
Figure 14 shows the CDF results tested in the laboratory room. In this case, we will not bother to describe much the results of the proposed approach with the combined fingerprints, because it merely achieves better performance at one testing location compared to that of using the amplitude fingerprints. According to
Figure 14, the two curves almost overlap except an apparent difference at a testing location at the lower-left part of the figure. We can see that at that location, by employing the combined fingerprints we achieve a localization error of 0.0193 m, whereas it is 0.14725 m by merely using the amplitude fingerprints.
In this testbed, though the environment is cluttered, the proposed approach still achieves rather good performance that the localization errors of about 50% of the testing locations are below 1.20 m with the amplitude fingerprints, and 1.35 m with the phase fingerprints. Pilot achieves that 50% of the test locations are under 1.55 m. Nuzzer has 50% of the testing locations merely under 1.6 m. Furthermore, for the proposed approach, the localization errors of 80% of the testing locations are well below 1.75 m and 2.3 m with respectively the amplitude fingerprints and the phase fingerprints, whereas those of Pilot and Nuzzer are about 2.45 m and 2.50 m respectively.
According to the results, we can see that the proposed approach, which utilizes multiple communication links and the uncertainty information of CSI, performs better than Pilot in both testbeds, no matter what type of fingerprints is used. The better results of the proposed approach and Pilot than that of Nuzzer demonstrate the advantage of CSI that multiple subcarriers provide more useful information. In comparison, RSSI has merely one integer value, merely providing rather coarse information about the quality of a communication link.
6.3. Influence of the Parameters
In this section, we explore the effects of the parameter selections on the localization accuracy, including the combination of communication links, selection of the type of fingerprints, number of packets, and value of the scaling factor.
6.3.1. Combination of Communication Link
To study the influence of different communication link combinations on the localization accuracy, we experimented several times in each environment. We denote the three links as , , and respectively. Further, represents the combination of and , represents the combination of , and , and so on.
As we can see from
Figure 15a, in the corridor scenario, when using
, we obtain the best accuracy among all the link combinations, no matter what type of fingerprints is used. Moreover, using
have better performance than that of using merely
or
, whatever type of fingerprints is used. Utilizing
, we can achieve better performance than that of using merely
or
c under the condition of adopting the combined fingerprints or the phase fingerprints. Furthermore, by combining all the three links, we can obtain lower localization errors than the situations of adopting merely
or
, no matter what type of fingerprints is used. However,
cannot beat the single link
c when employing the amplitude fingerprints or the combined fingerprints.
The results of the laboratory are shown in
Figure 15b. We can see that the best performance is achieved when employing
, for whatever type of fingerprints. By adopting
a–
b–
c, we can obtain the suboptimal results, for an arbitrary type of fingerprints. However, using
do not yield lower localization errors than using
, but it still produces better results than the single link
. We can see a similar result when using
, where it achieves lower localization errors than the single link
but higher localization errors than the link
, on the condition of adopting the amplitude fingerprints or the combined fingerprints. Meanwhile, with the phase fingerprints,
beats the single link
and
c.
According to the results, we notice that combining multiple communication links is a reasonable way of enhancing localization accuracy, but it does not necessarily produce an improved result. Therefore, a careful selection of the communication link combination is needed.
6.3.2. Selection of the Type of Fingerprints
In this part, we explore the effects of using different types of fingerprints, namely the amplitude fingerprints, phase fingerprints, and combined fingerprints. The results are shown in
Figure 15. We can see that, in the corridor room, simultaneously using the combined fingerprints has the best performance among all the communication link combinations. Additionally, employing the amplitude fingerprints is much more likely to achieve better performance than the phase fingerprints.
In the laboratory scenario, we observe similar results to those in the corridor. In the cases of except , adopting the combined fingerprints can obtain a bit lower localization errors than merely using the amplitude fingerprints or the phase fingerprints. However, we notice that combining amplitude and phase do not necessarily improve performance, which is also shown in the results of the case . In the case , the phase information has no positive contribution to the localization accuracy improvement but negative effects. By setting to be nearly 0, we can approximately eliminate the effects of the phase information, thus making the localization accuracy nearly equivalent to that of the amplitude fingerprints. Moreover, in this case, it is pointless to generate the combined fingerprints to localize a target, because no accuracy improvement will be seen, and if the parameters are not carefully selected, we may obtain a degraded result. For example, when we set and to be 0.01, we will obtain a localization error of 1.52433 m with the amplitude fingerprints, and 1.56442 m with the phase fingerprints. However, by utilizing the combined fingerprints, the localization error is 1.59327 m, worse than the other two situations.
Another observation is that in the laboratory, the results of the amplitude fingerprints are better than those of the phase fingerprints in all the communication link combinations.
According to our results, we conclude that it is hard to tell which is better, amplitude or phase, but usually, utilizing the amplitude fingerprints is more likely to yield a better result than using the phase fingerprints. Furthermore, combining the CSI amplitude and phase, generally, achieves better results than merely using either of them, but there may also be some cases where the combination of amplitude and phase has no localization accuracy improvement.
6.3.3. Number of Packets (η)
To obtain the mean vectors and covariance matrices used for the construction of the fingerprints, we need to collect enough packets, thus yielding accurate estimates. In this part, we conducted several experiments to explore the effects of this parameter. Specifically, for situations where the packets number is smaller than or equal to 30, we enforce regularization to make sure we can obtain a relatively good estimate, where the regularization term is set to be 1 × 10−10.
The results are shown in
Table 4. In the corridor testbed, when
is smaller than or equal to 30, we observe rather bad performance whatever type of fingerprints is used. On the whole, with the increase of the value of
, the mean distance error displays a decreasing trend, except a spike when
equals 30. The localization performance then starts to become roughly stable after
is equal to 50.
In the laboratory room, the localization error of the proposed approach with the phase fingerprints keeps rather stable when η is smaller than or equal to 50, and with reaching 100, it plummets to about 1.55 m and then keeps stable. This may imply that 100 consecutive packets are enough for a good estimate in this testbed when the phase fingerprints are used, whereas 50 packets are not.
Again, we will not spare too much effort to discuss the results of the combined fingerprints for the reason mentioned in
Section 6.2 and in the rest of this paragraph; all the focus will be put on the situation where the amplitude fingerprints are used. We can see that the results of the amplitude fingerprints are oscillating before
reaches 50 and become stable after that value. We consider that this phenomenon also reflects that in this testbed, a small number of packets, say less than or equal to 40, is not sufficient to obtain stable performance.
According to our results, we observe that the localization error is sensitive to the value of . When the value is too small, it may be possible that we cannot produce a good result. With the increase of its value, the results are likely to become stable, but there might be fluctuations over accuracy. In this study, we think using 100 consecutive packets is a nice choice. The reason why we choose 100 is that we hope to obtain a sufficiently good estimate for the mean vectors and covariance matrices without too much time delay or device burden. For the cases where is less than 100, the results are likely to be unstable. When it is greater than 100, we either need more time to collect the samples or have to increase the sampling rate, which will impose more burden on the devices. Our device can transmit packets at a rate of 100 or 200 per second easily, and the time needed for collecting samples is less than or equal to 1 s, which is reasonable. Therefore, we think choosing 100 consecutive samples is a good tradeoff.
6.3.4. The Value of the Scaling Factor
In this part, we explore the effects of the scaling factor. As we have articulated, when the size of the sequence is insufficient for a good estimate, it will make the estimated covariance matrix deviant from the ground truth or even possibly non-invertible. In these cases, the regularization is needed to force the covariance matrix to exhibit non-singularity. In our study, when the size of the sequence is smaller than or equal to 30, it is likely that we will obtain a bad estimate of the covariance matrix. We use the results when
η is 10 to display the effects of different values of
γ on localization performance, as in
Table 5.
In the corridor testbed, the proposed approach with the amplitude fingerprints or the combined fingerprints has fairly stable performance with the increase of the value of γ. For the situation of using the phase fingerprints, with the increase of the value of γ, the localization error first keeps stable and then plummet to about 1.19 m when reaches 1 × 100.
In the laboratory room, the proposed approach with the amplitude fingerprints or combined fingerprints exhibit a gradually increasing trend. At first, the localization error keeps stable, but starts to rise when reaches 1 × 10−2 and keeps surging. The proposed approach with the phase fingerprints displays a downward trend, whose localization error also keeps stable at first but begins to decrease slightly with reaching 1 × 10−4.
Also, we tested the situations without regularization. We have to say that although in these cases we obtained the inverse of the covariance matrices, one thing for sure is that the inverse is considerably deviant from the ground truth. According to
Table 6, we can see that the results without regularization are rather bad compared to those with regularization.
Our results show that in different scenarios, the sensitivity of the value of to the localization error is different, and different types of fingerprints have diverse sensitivity to this parameter. Furthermore, we note that adding a regularization term with a small value is sufficient for improving the localization performance in such ill-conditioned situations.
7. Conclusions
In this paper, we propose a novel approach, which utilizes the uncertainty of CSI, embodied by the probability distribution, to implementing target localization in a device-free manner. Firstly, we show that the Gaussian distribution can be used to model the CSI sanitized phases of a subcarrier. Furthermore, we also model the CSI amplitudes of a subcarrier as a Gaussian distribution. Then, we show that the mean vectors and covariance matrices of the CSI amplitudes or sanitized phases may display different patterns when a target stands at different locations. Therefore, we model the CSI amplitudes or the sanitized phases of the subcarriers within a communication link as a multivariate Gaussian distribution to further exploit these differences. Further, we use multiple communication links to boost useful information. To localize the target, we utilize the symmetrized KL-divergence to calculate the ‘dissimilarity’ of a testing fingerprint with the fingerprints in the radio map. Next, we adopt a kernel function to transform the ‘dissimilarity’ to the form of probability. By considering the probabilities as the weights, we can obtain the location estimate with a weighted averaging method. Moreover, the proposed approach can process three types of fingerprints, namely the amplitude fingerprints, phase fingerprints, and combined fingerprints.
We conduct extensive experiments to demonstrate the effectiveness of the proposed approach and also explore the effects of the choices of different parameters on the localization error. The experimental results show that the proposed approach achieves good performance in two typical indoor environments.
In this study, we do not take location tracking into consideration, which may be part of our future work. The incorporation of the fingerprinting-based approaches and the model-based ones may also be part of our future work. Furthermore, we merely assume that the different communication links are independent of one another and that the CSI amplitude and sanitized phase of a subcarrier are also independent of each other, and the study of their relationships may be part of our future work.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}