Traversability Assessment and Trajectory Planning of Unmanned Ground Vehicles with Suspension Systems on Rough Terrain


Abstract
1. Introduction
- The suspension system of the vehicle is used to reduce the pose estimation error and optimize the trajectory. The optimized trajectory is easy to be tracked by the vehicle in non-planar environments.
- The traversability is assessed on demand based on original LiDAR points during trajectory planning, without any kind of explicit terrain surface reconstruction or discretization. This feature makes the proposed method efficient in terms of computation and storage.
- The cost function and the node-expansion rule of the conventional A* are modified to obtain a path satisfying non-holonomic constraints. This path is then optimized by a constraint-aware optimizer based on a custom cost function. The final trajectory is smoother and more traversable than those generated by other state-of-the-art methods.
- The proposed traversability assessor (or trajectory planner) is general and can be used with any other motion planning method (or traversability assessment method).
1.1. Related Work
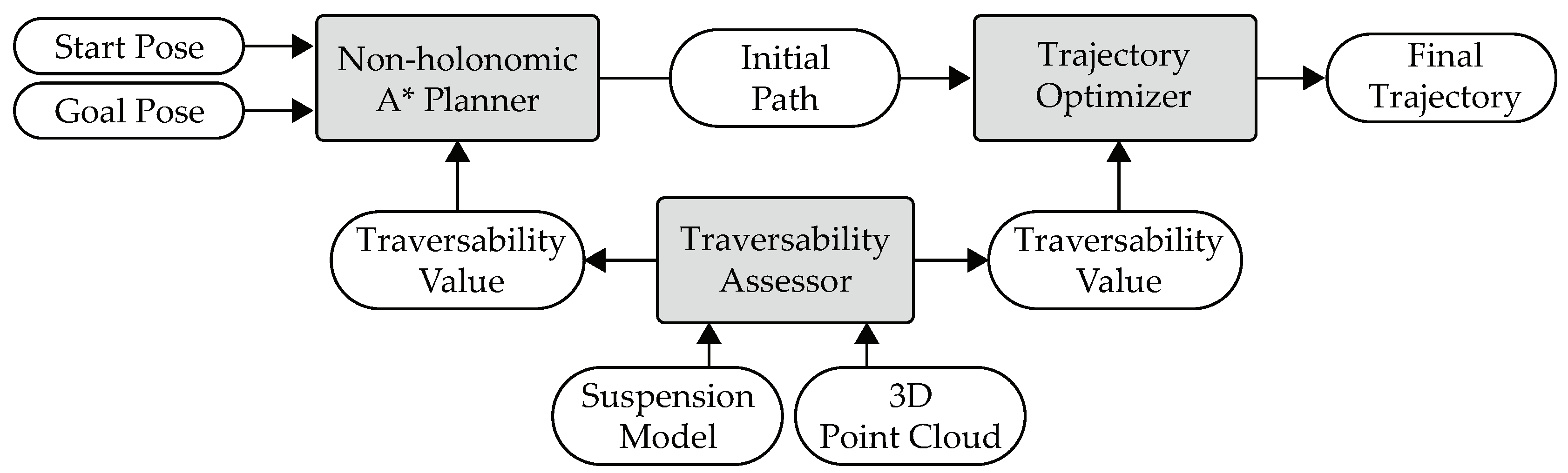
2. System Architecture
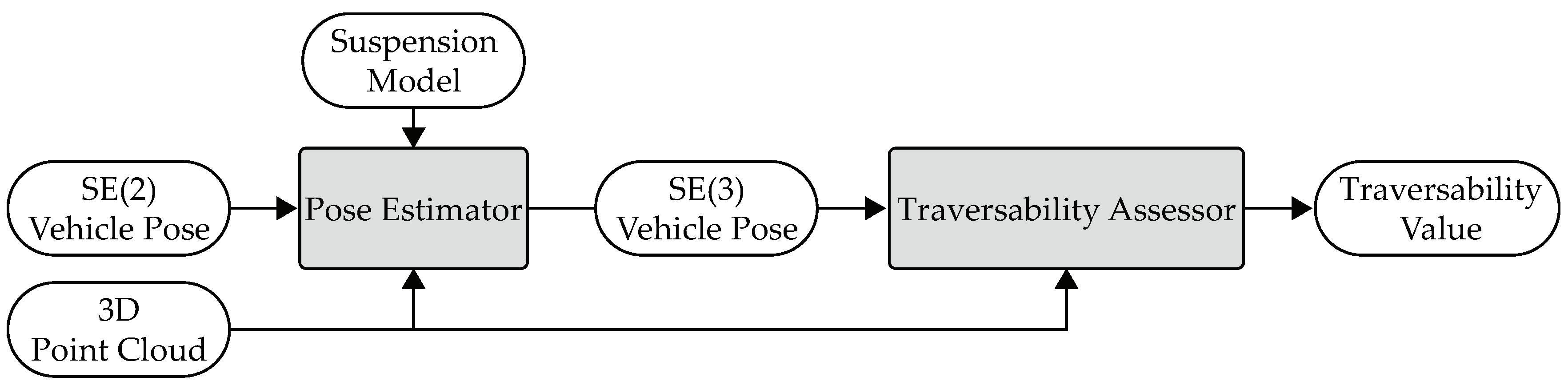
3. Traversability Assessment Using LiDAR
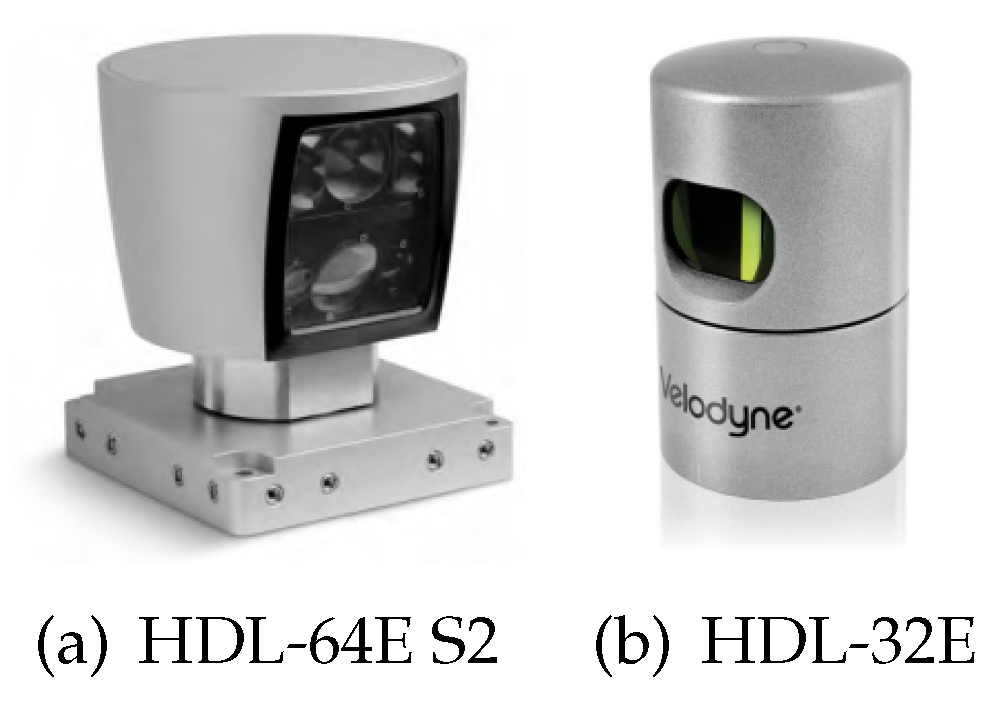
3.1. Light Detection and Ranging
3.2. Pose Estimation
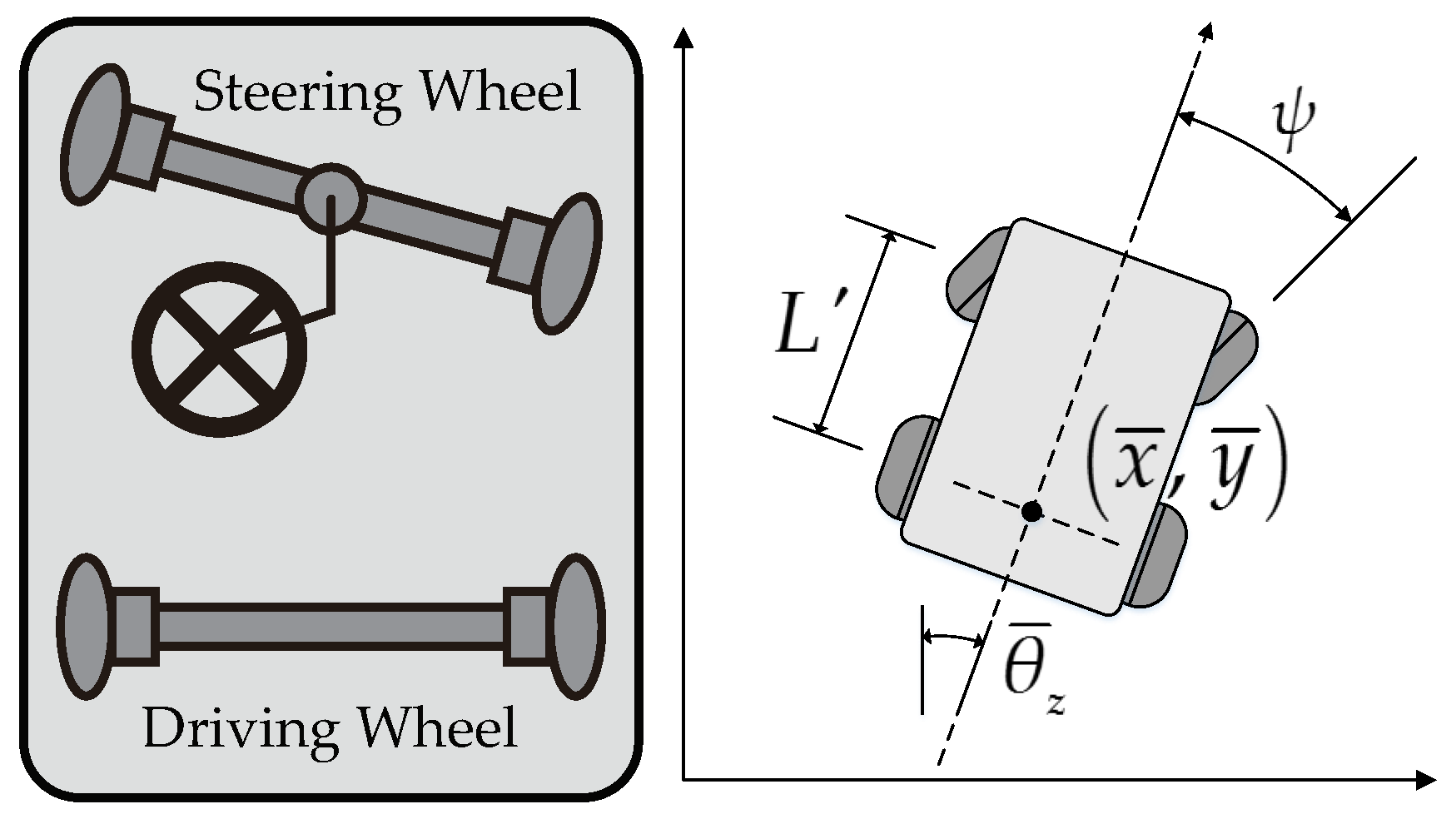
3.2.1. Euler Angle Estimation Based on Wheel-Terrain Interaction
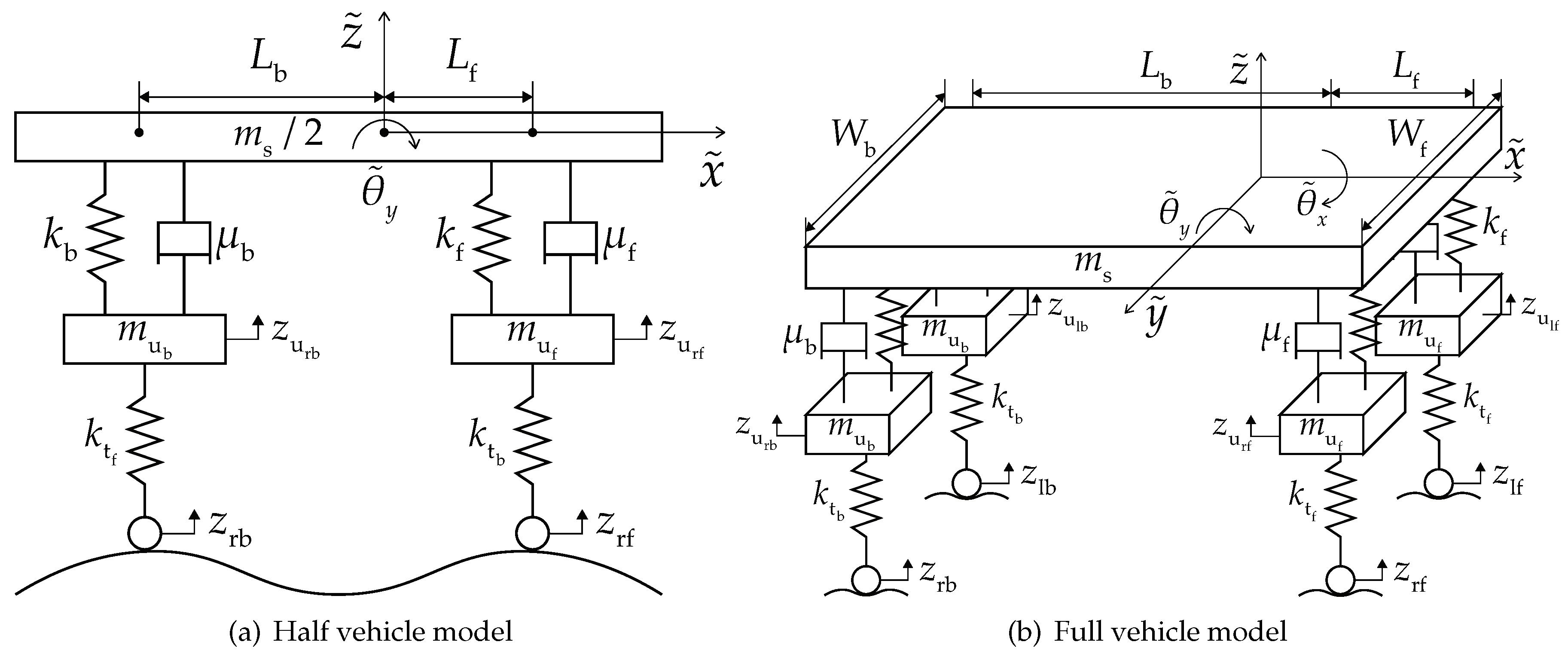
3.2.2. Pose Estimation Based on Suspension System
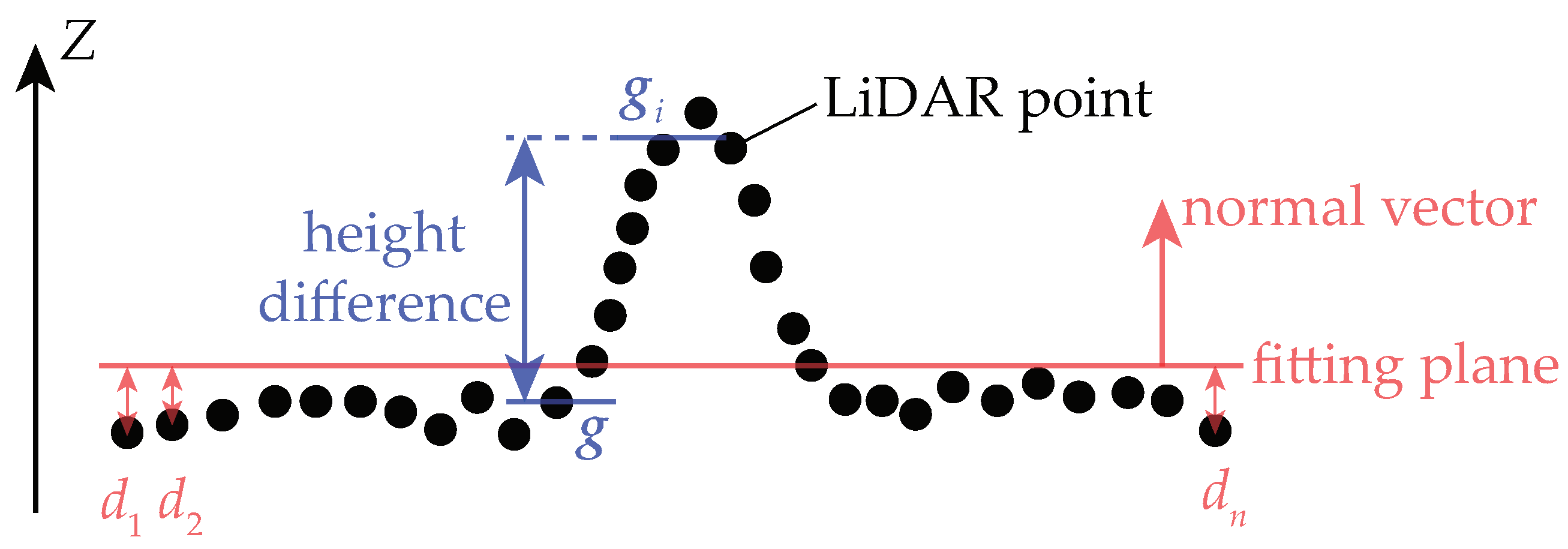
3.3. Traversability Computation
4. Trajectory Planning
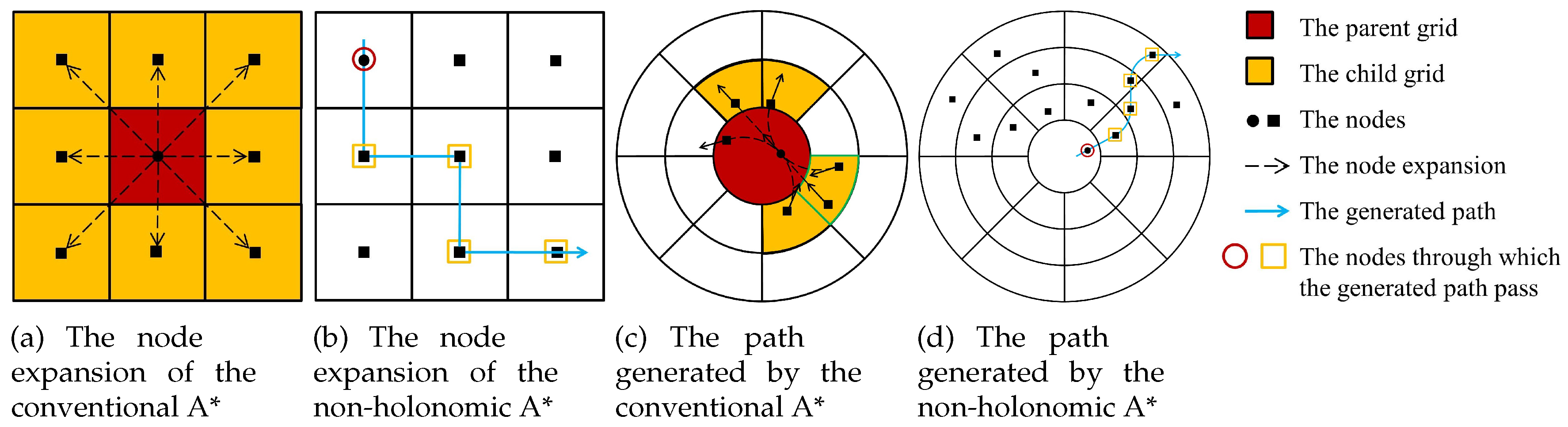
4.1. Non-Holonomic A*
4.1.1. Non-Holonomic Constraints
4.1.2. Node Expansion
4.1.3. Cost Function
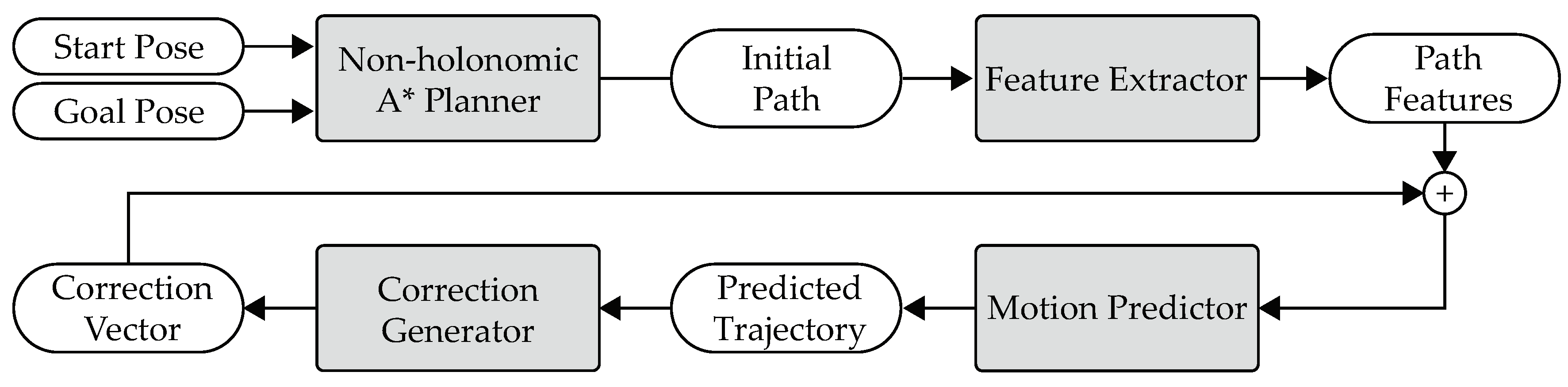
4.2. Trajectory Optimization
4.2.1. Feature Extraction
4.2.2. Motion Prediction
4.2.3. Numerical Optimization
5. Experimental Results and Discussion
5.1. Simulation Experiments
5.2. Real-World Experiments
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| UGV | Unmanned Ground Vehicle |
| LiDAR | Light Detection and Ranging |
| DEM | Digital Elevation Map |
| ROS | Robot Operating System |
| GP | Gaussian Process |
| VE | Vehicle Experience |
| RMSE | Root Mean Squared Error |
| TS | Terrain Shape |
| IMU | Inertial Measurement Unit |
| GPS | Global Positioning System |
References
- Kelly, A.; Stentz, A. Rough terrain autonomous mobility—Part 2: An active vision, predictive control approach. Auton. Robots 1998, 5, 163–198. [Google Scholar] [CrossRef]
- Lacroix, S.; Mallet, A.; Bonnafous, D.; Bauzil, G.; Fleury, S.; Herrb, M.; Chatila, R. Autonomous rover navigation on unknown terrains: Functions and integration. Int. J. Robot. Res. 2002, 21, 917–942. [Google Scholar] [CrossRef]
- Bai, C.; Guo, J. Uncertainty-Based Vibration/Gyro Composite Planetary Terrain Mapping. Sensors 2019, 19, 2681. [Google Scholar] [CrossRef] [PubMed]
- Zhou, X.; Bai, T.; Gao, Y.; Han, Y. Vision-Based Robot Navigation through Combining Unsupervised Learning and Hierarchical Reinforcement Learning. Sensors 2019, 19, 1576. [Google Scholar] [CrossRef] [PubMed]
- Wellington, C.; Courville, A.C.; Stentz, A. Interacting Markov Random Fields for Simultaneous Terrain Modeling and Obstacle Detection. In Proceedings of the Robotics: Science and Systems, Cambridge, MA, USA, 8–11 June 2005; pp. 1–8. [Google Scholar]
- Daily, M.; Harris, J.; Keirsey, D.; Olin, D.; Payton, D.; Reiser, K.; Rosenblatt, J.; Tseng, D.; Wong, V. Autonomous cross-country navigation with the ALV. In Proceedings of the 1988 IEEE International Conference on Robotics and Automation, Philadelphia, PA, USA, 24–29 April 1988; pp. 718–726. [Google Scholar] [CrossRef]
- Ye, C.; Borenstein, J. A new terrain mapping method for mobile robots obstacle negotiation. In Proceedings of the Unmanned Ground Vehicle Technology, Orlando, FL, USA, 30 September 2003; pp. 52–63. [Google Scholar]
- Ren, Z.; Wang, L.; Bi, L. Robust GICP-Based 3D LiDAR SLAM for Underground Mining Environment. Sensors 2019, 19, 2915. [Google Scholar] [CrossRef] [PubMed]
- Peterson, J.; Chaudhry, H.; Abdelatty, K.; Bird, J.; Kochersberger, K. Online Aerial Terrain Mapping for Ground Robot Navigation. Sensors 2018, 18, 630. [Google Scholar] [CrossRef]
- Vlaminck, M.; Luong, H.; Philips, W. Have I Seen This Place Before? A Fast and Robust Loop Detection and Correction Method for 3D Lidar SLAM. Sensors 2019, 19, 23. [Google Scholar] [CrossRef]
- Pang, C.; Zhong, X.; Hu, H.; Tian, J.; Peng, X.; Zeng, J. Adaptive Obstacle Detection for Mobile Robots in Urban Environments Using Downward-Looking 2D LiDAR. Sensors 2018, 18, 1749. [Google Scholar] [CrossRef]
- Castaño, F.; Beruvides, G.; Haber, R.E.; Artuñedo, A. Obstacle Recognition Based on Machine Learning for On-Chip LiDAR Sensors in a Cyber-Physical System. Sensors 2017, 17, 2109. [Google Scholar] [CrossRef]
- Castaño, F.; Beruvides, G.; Villalonga, A.; Haber, R.E. Self-Tuning Method for Increased Obstacle Detection Reliability Based on Internet of Things LiDAR Sensor Models. Sensors 2018, 18, 1508. [Google Scholar] [CrossRef]
- Maimone, M.; Johnson, A.; Cheng, Y.; Willson, R.; Matthies, L. Autonomous Navigation Results from the Mars Exploration Rover (MER) Mission. In Proceedings of the 9th International Symposium on Experimental Robotics, Singapore, 18–21 June 2004; pp. 3–13. [Google Scholar]
- Wettergreen, D.; Jonak, D.; Kohanbash, D.; Moreland, S.; Spiker, S.; Teza, J. Field Experiments in Mobility and Navigation with a Lunar Rover Prototype. In Proceedings of the 7th International Conference on Field and Service Robotics, Cambridge, MA, USA, 13 July 2009; pp. 489–498. [Google Scholar]
- Pfaff, P.; Triebel, R.; Burgard, W. An efficient extension to elevation maps for outdoor terrain mapping and loop closing. Int. J. Robot. Res. 2007, 26, 217–230. [Google Scholar] [CrossRef]
- Stumm, E.; Breitenmoser, A.; Pomerleau, F.; Pradalier, C.; Siegwart, R. Tensor-voting-based navigation for robotic inspection of 3D surfaces using lidar point clouds. Int. J. Robot. Res. 2012, 31, 1465–1488. [Google Scholar] [CrossRef]
- Garrido, S.; Malfaz, M.; Blanco, D. Application of the fast marching method for outdoor motion planning in robotics. Robot. Auton. Syst. 2013, 61, 106–114. [Google Scholar] [CrossRef]
- Kummerle, R.; Hahnel, D.; Dolgov, D.; Thrun, S.; Burgard, W. Autonomous driving in a multi-level parking structure. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3395–3400. [Google Scholar] [CrossRef]
- Khan, Y.N.; Komma, P.; Zell, A. High resolution visual terrain classification for outdoor robots. In Proceedings of the 2011 IEEE International Conference on Computer Vision Workshops, Barcelona, Spain, 6–13 November 2011; pp. 1014–1021. [Google Scholar] [CrossRef]
- Singh, S.; Simmons, R.; Smith, T.; Stentz, A.; Verma, V.; Yahja, A.; Schwehr, K. Recent progress in local and global traversability for planetary rovers. In Proceedings of the 2000 IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 24–28 April 2000; pp. 1194–1200. [Google Scholar]
- Santana, P.; Guedes, M.; Correia, L.; Barata, J. Stereo-based all-terrain obstacle detection using visual saliency. J. Field Robot. 2011, 28, 241–263. [Google Scholar] [CrossRef]
- Karumanchi, S.; Allen, T.; Bailey, T.; Scheding, S. Non-parametric learning to aid path planning over slopes. Int. J. Robot. Res. 2010, 29, 997–1018. [Google Scholar] [CrossRef]
- Peynot, T.; Lui, S.T.; McAllister, R.; Fitch, R.; Sukkarieh, S. Learned stochastic mobility prediction for planning with control uncertainty on unstructured terrain. J. Field Robot. 2014, 31, 969–995. [Google Scholar] [CrossRef]
- Krebs, A.; Pradalier, C.; Siegwart, R. Adaptive rover behavior based on online empirical evaluation: Rover–terrain interaction and near-to-far learning. J. Field Robot. 2010, 27, 158–180. [Google Scholar] [CrossRef]
- Krüsi, P.; Furgale, P.; Bosse, M.; Siegwart, R. Driving on point clouds: Motion planning, trajectory optimization, and terrain assessment in generic nonplanar environments. J. Field Robot. 2017, 34, 940–984. [Google Scholar] [CrossRef]
- Santamaria-Navarro, À.; Teniente, E.H.; Morta, M.; Andrade-Cetto, J. Terrain Classification in Complex Three-dimensional Outdoor Environments. J. Field Robot. 2015, 32, 42–60. [Google Scholar] [CrossRef]
- Mohanan, M.G.; Salgoankar, A. A survey of robotic motion planning in dynamic environments. Robot. Auton. Syst. 2018, 100, 171–185. [Google Scholar] [CrossRef]
- Rasekhipour, Y.; Khajepour, A.; Chen, S.; Litkouhi, B. A Potential Field-Based Model Predictive Path-Planning Controller for Autonomous Road Vehicles. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1255–1267. [Google Scholar] [CrossRef]
- Paden, B.; Čáp, M.; Yong, S.Z.; Yershov, D.; Frazzoli, E. A Survey of Motion Planning and Control Techniques for Self-Driving Urban Vehicles. IEEE Trans. Intell. Veh. 2016, 1, 33–55. [Google Scholar] [CrossRef]
- Sato, H.; Iwai, T. A new, globally convergent Riemannian conjugate gradient method. Optimization 2015, 64, 1011–1031. [Google Scholar] [CrossRef]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Pivtoraiko, M.; Knepper, R.A.; Kelly, A. Differentially constrained mobile robot motion planning in state lattices. J. Field Robot. 2009, 26, 308–333. [Google Scholar] [CrossRef]
- LaValle, S.M.; Kuffner, J.J. Randomized Kinodynamic Planning. Int. J. Robot. Res. 2001, 20, 378–400. [Google Scholar] [CrossRef]
- Karaman, S.; Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int. J. Robot. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef]
- Amar, F.B.; Bidaud, P.; Ouezdou, F.B. On modeling and motion planning of planetary vehicles. In Proceedings of the 1993 IEEE/RSJ International Conference on Intelligent Robots and Systems, Yokohama, Japan, 26–30 July 1993; pp. 1381–1386. [Google Scholar] [CrossRef]
- Howard, T.M.; Kelly, A. Optimal rough terrain trajectory generation for wheeled mobile robots. Int. J. Robot. Res. 2007, 26, 141–166. [Google Scholar] [CrossRef]
- Furgale, P.; Barfoot, T.D. Visual teach and repeat for long-range rover autonomy. J. Field Robot. 2010, 27, 534–560. [Google Scholar] [CrossRef]
- McManus, C.; Furgale, P.; Stenning, B.; Barfoot, T.D. Lighting-invariant visual teach and repeat using appearance-based lidar. J. Field Robot. 2013, 30, 254–287. [Google Scholar] [CrossRef]
- Rekleitis, I.; Bedwani, J.L.; Dupuis, E.; Lamarche, T.; Allard, P. Autonomous over-the-horizon navigation using LIDAR data. Auton. Robots 2013, 34, 1–18. [Google Scholar] [CrossRef]
- Woods, M.; Shaw, A.; Tidey, E.; Van Pham, B.; Simon, L.; Mukherji, R.; Maddison, B.; Cross, G.; Kisdi, A.; Tubby, W. Seeker—Autonomous Long-range Rover Navigation for Remote Exploration. J. Field Robot. 2014, 31, 940–968. [Google Scholar] [CrossRef]
- Silver, D.; Bagnell, J.A.; Stentz, A. Learning from Demonstration for Autonomous Navigation in Complex Unstructured Terrain. Int. J. Robot. Res. 2010, 29, 1565–1592. [Google Scholar] [CrossRef]
- Gandhi, P.; Adarsh, S.; Ramachandran, K. Performance Analysis of Half Car Suspension Model with 4 DOF using PID, LQR, FUZZY and ANFIS Controllers. Procedia Comput. Sci. 2017, 115, 2–13. [Google Scholar] [CrossRef]
- Ikenaga, S.; Lewis, F.L.; Campos, J.; Davis, L. Active suspension control of ground vehicle based on a full-vehicle model. In Proceedings of the 2000 American Control Conference, Chicago, IL, USA, 28–30 June 2000; pp. 4019–4024. [Google Scholar] [CrossRef]
- Ho, K.; Peynot, T.; Sukkarieh, S. Traversability estimation for a planetary rover via experimental kernel learning in a Gaussian process framework. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 3475–3482. [Google Scholar] [CrossRef]
- Chu, K.; Kim, J.; Jo, K.; Sunwoo, M. Real-time path planning of autonomous vehicles for unstructured road navigation. Int. J. Automot. Technol. 2015, 16, 653–668. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | HDL-64E S2 | HDL-32E |
|---|---|---|
| Distance accuracy | cm | cm |
| Measurement range | 50 m for pavement and 120 m for cars and foliage | 70 m |
| Vertical field of view | to | to |
| Vertical angular resolution | ||
| Horizontal angular resolution | ||
| # Points per second | 1,333,000 | 700,000 |
| Notation | Definition |
|---|---|
| Mass of sprung | |
| Mass of front unsprung | |
| Mass of back unsprung | |
| Roll axis moment of inertia | |
| Pitch axis moment of inertia | |
| Stiffness of front tire | |
| Stiffness of back tire | |
| Front suspension spring stiffness | |
| Back suspension spring stiffness | |
| Front suspension damping | |
| Back suspension damping | |
| Width of front sprung | |
| Width of back sprung | |
| Length between vehicle front axle and center of gravity of sprung | |
| Length between vehicle back axle and center of gravity of sprung |
| Terrain Surface | Method | RMSE of Roll (Rad) | RMSE of Pitch (Rad) |
|---|---|---|---|
| Figure 11a | DEM-Kin | 0.0751 | 0.0806 |
| Kin-GP-VE | 0.0612 | 0.0654 | |
| PC-Sus | 0.0389 | 0.0405 | |
| Figure 11b | DEM-Kin | 0.0921 | 0.0984 |
| Kin-GP-VE | 0.0763 | 0.0817 | |
| PC-Sus | 0.0502 | 0.0535 | |
| Improvement over DEM-Kin | 46.85% | 47.69% | |
| Improvement over Kin-GP-VE | 35.33% | 36.30% | |
| Terrain Surface Shown in Figure 13a | ||||||
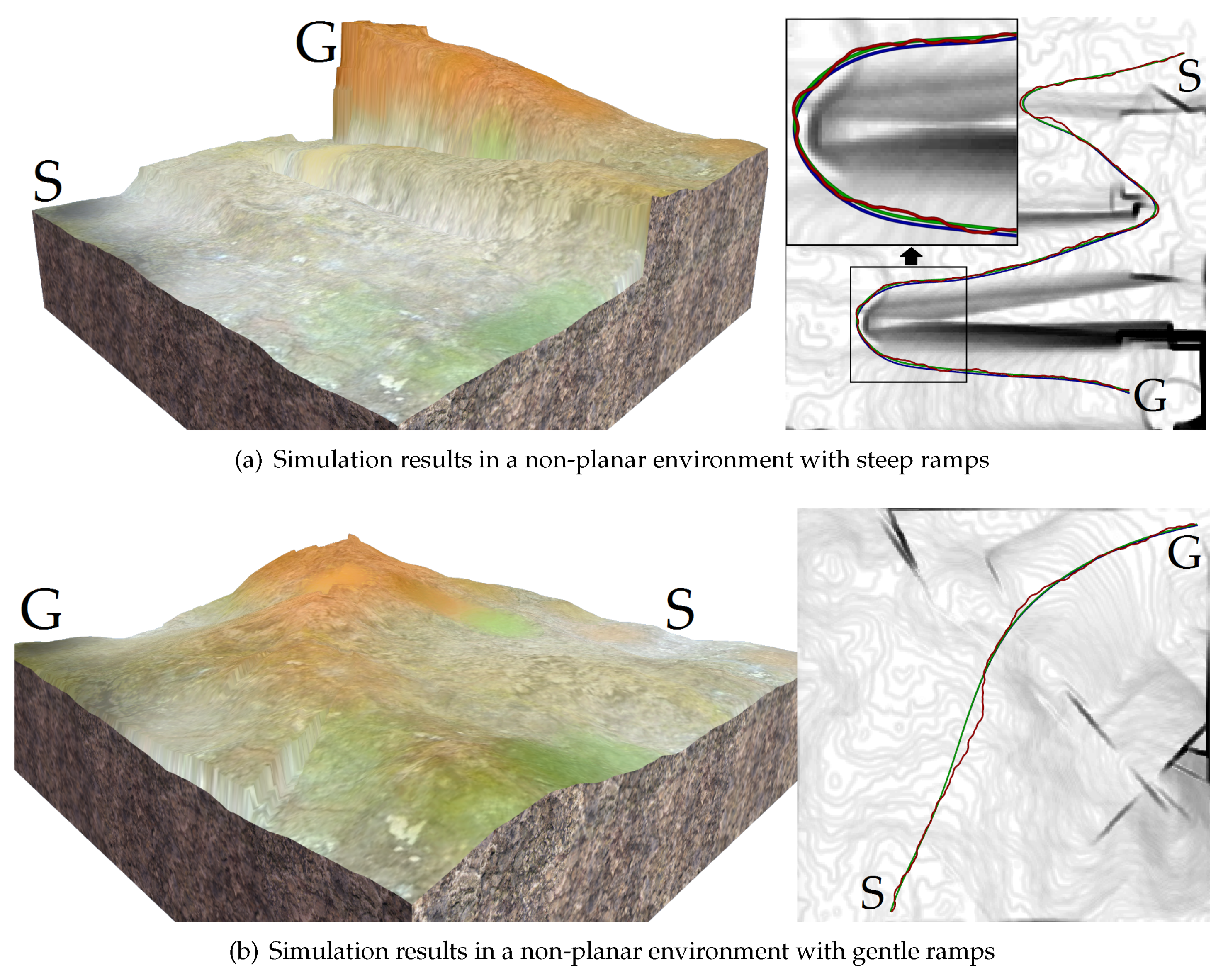
| Path or Trajectory | (m) | (s) | (m) | Trajectory Smoothness | Total Cost | |
| Initial path | 6.09 | 0.9099 | 207.09 | 617.48 | 0.0111 | 1.0000 |
| Optimized trajectory | 6.53 | 0.9281 | 200.24 | 596.23 | 1.0000 | 0.2079 |
| Real trajectory | 6.45 | 0.9267 | 201.33 | 598.79 | 0.9822 | 0.2190 |
| Terrain Surface Shown in Figure 13b | ||||||
| Path or Trajectory | (m) | (s) | (m) | Trajectory Smoothness | Total Cost | |
| Initial path | 15.44 | 0.9329 | 115.03 | 340.60 | 0.4484 | 1.0000 |
| Optimized trajectory | 18.08 | 0.9466 | 111.71 | 330.62 | 1.0000 | 0.6461 |
| Real trajectory | 18.72 | 0.9465 | 111.98 | 331.88 | 0.9937 | 0.6526 |
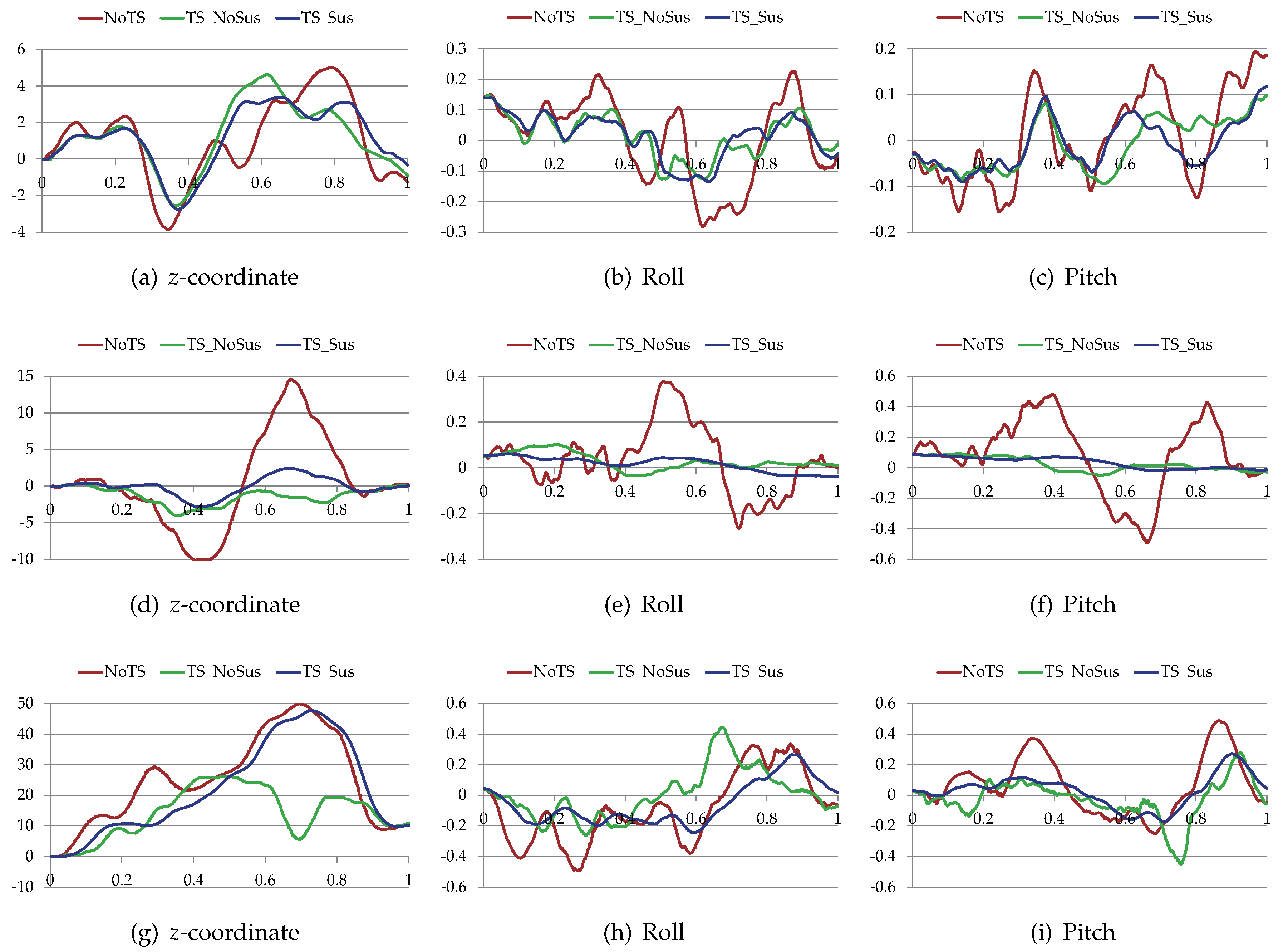
| Terrain Surface Shown in Figure 15a | |||||||
| Method | (m) | (s) | (m) | Trajectory Smoothness | Total Cost | Runtime (s) | |
| NoTS | 0.9318 | 114.53 | 336.08 | 0.7738 | 0.3533 | 3.220 | |
| TS-NoSus | 0.9495 | 121.22 | 344.15 | 0.2050 | 1.0000 | 4.861 | |
| TS-Sus | 0.9497 | 112.46 | 332.87 | 1.0000 | 0.3299 | 3.338 | |
| Terrain Surface Shown in Figure 15b | |||||||
| Method | (m) | (s) | (m) | Trajectory Smoothness | Total Cost | Runtime (s) | |
| NoTS | 0.2765 | 119.81 | 354.92 | 0.2714 | 1.0000 | 3.385 | |
| TS-NoSus | 0.9708 | 123.82 | 366.95 | 0.5066 | 0.3973 | 4.217 | |
| TS-Sus | 0.9795 | 117.97 | 351.42 | 1.0000 | 0.2880 | 3.782 | |
| Terrain Surface Shown in Figure 15c | |||||||
| Method | (m) | (s) | (m) | Trajectory Smoothness | Total Cost | Runtime (s) | |
| NoTS | 6.08 | 0.3461 | 127.96 | 379.39 | 0.2966 | 1.0000 | 3.617 |
| TS-NoSus | 11.69 | 0.9317 | 152.22 | 452.17 | 0.7318 | 0.4407 | 4.418 |
| TS-Sus | 12.82 | 0.9296 | 124.65 | 378.46 | 1.0000 | 0.3748 | 3.730 |
| Measurement Range (Roll, Pitch) | Accuracy (Roll, Pitch) | Resolution (Roll, Pitch) | Bandwidth |
|---|---|---|---|
| to | 300 Hz |
| Non-Planar Environment | Method | RMSE of Roll (Rad) | RMSE of Pitch (Rad) |
|---|---|---|---|
| Figure 19a | DEM-Kin | 0.0763 | 0.0819 |
| Kin-GP-VE | 0.0605 | 0.0640 | |
| PC-Sus | 0.0343 | 0.0367 | |
| Figure 19b | DEM-Kin | 0.1104 | 0.1196 |
| Kin-GP-VE | 0.0879 | 0.0963 | |
| PC-Sus | 0.0617 | 0.0662 | |
| Improvement over DEM-Kin | 49.58% | 49.92% | |
| Improvement over Kin-GP-VE | 36.56% | 36.96% | |
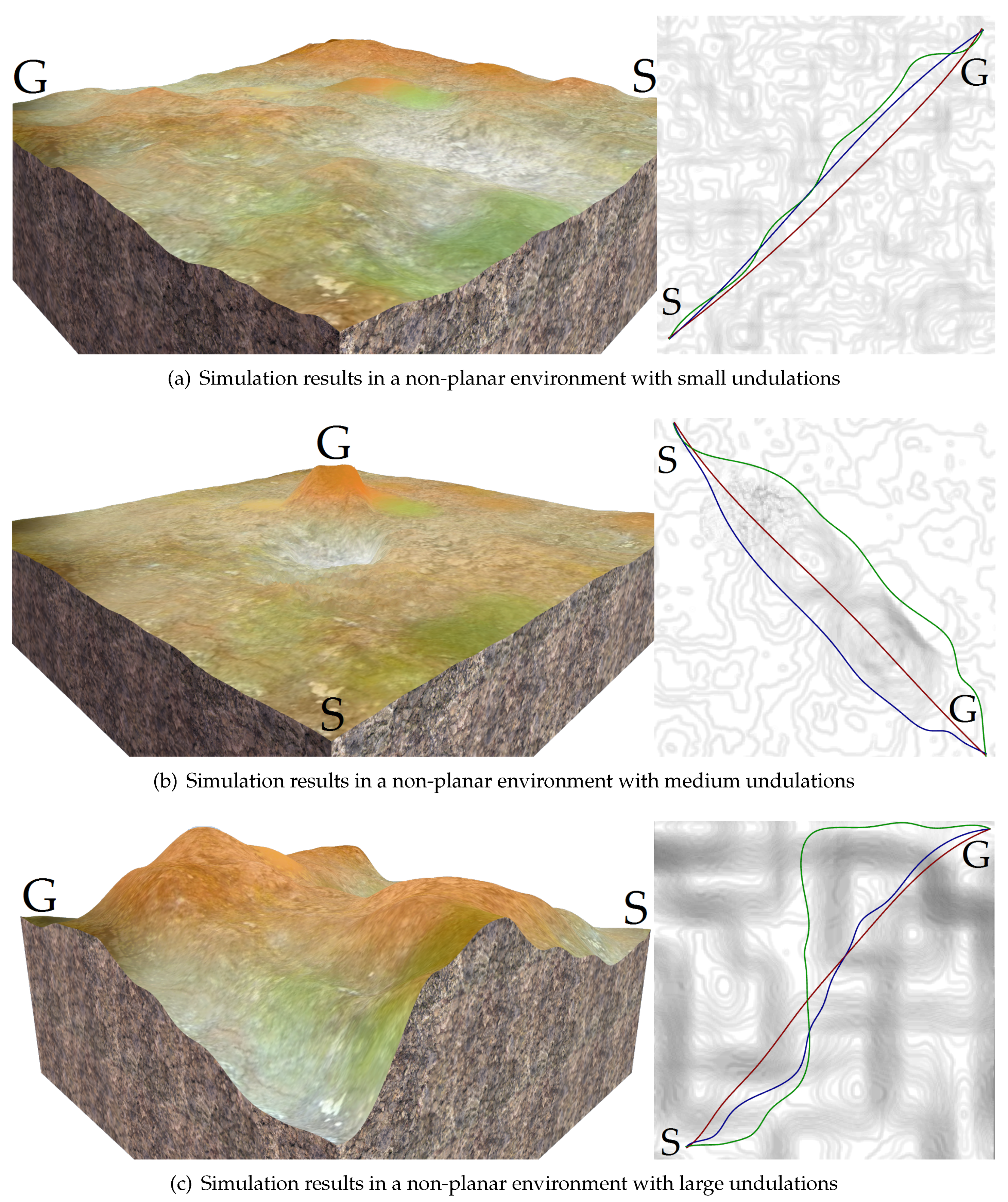
| Non-Planar Environment Shown in Figure 21a | |||||||
| Method | (m) | (s) | (m) | Trajectory Smoothness | Total Cost | Runtime (s) | |
| NoTS | 0.9046 | 60.47 | 178.57 | 0.9970 | 0.6944 | 1.489 | |
| TS-NoSus | 0.9185 | 61.81 | 183.18 | 0.4490 | 1.0000 | 2.334 | |
| TS-Sus | 0.9174 | 60.04 | 177.68 | 1.0000 | 0.5176 | 1.519 | |
| Non-Planar Environment Shown in Figure 21b | |||||||
| Method | (m) | (s) | (m) | Trajectory Smoothness | Total Cost | Runtime (s) | |
| NoTS | 13.45 | 0.5165 | 69.09 | 196.83 | 0.9982 | 1.0000 | 3.103 |
| TS-NoSus | 14.33 | 0.9155 | 78.05 | 222.62 | 0.8409 | 0.7358 | 4.840 |
| TS-Sus | 14.51 | 0.9165 | 70.54 | 199.08 | 1.0000 | 0.6435 | 3.174 |
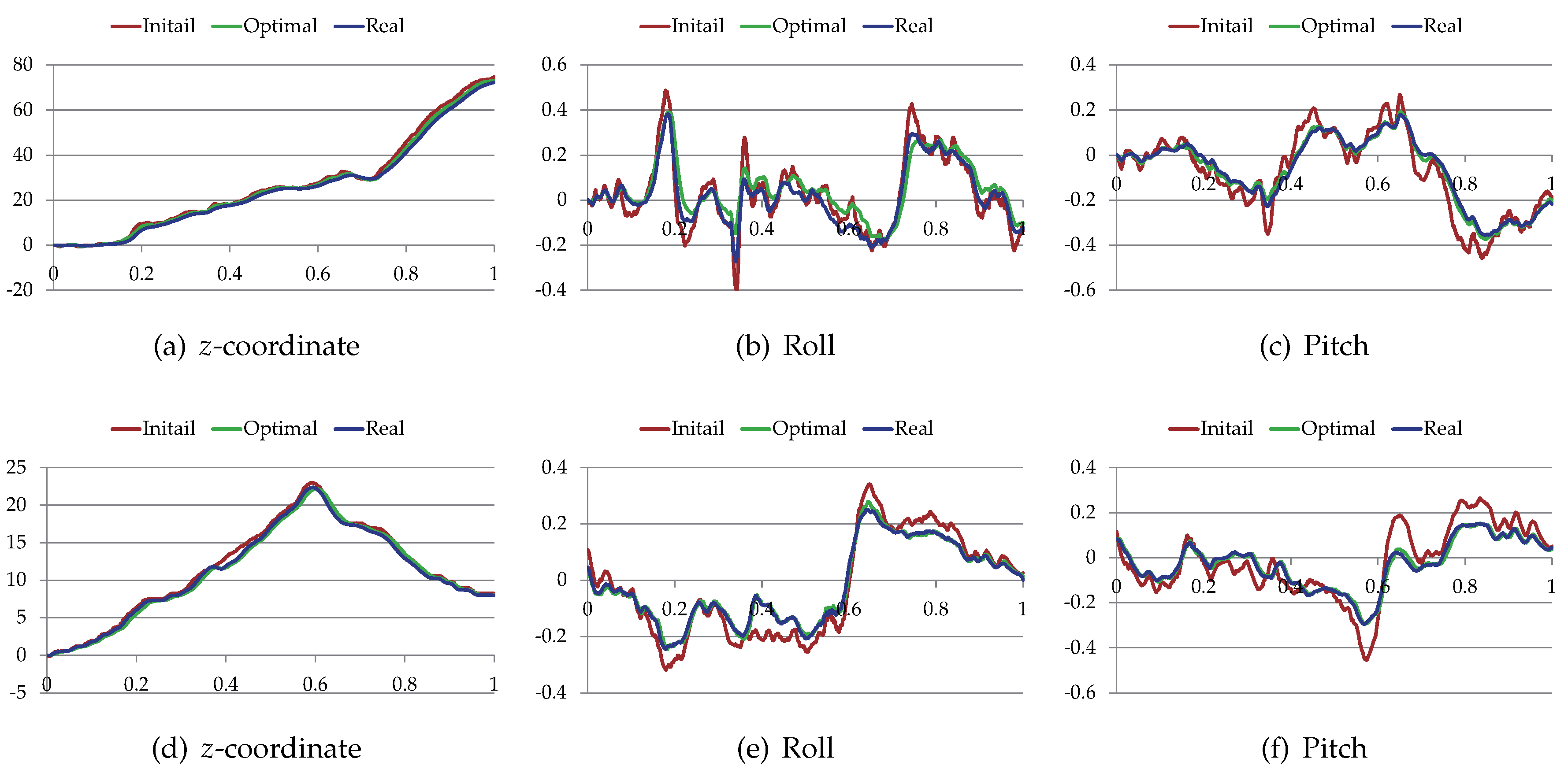
| Terrain Surface Shown in Figure 23a | ||||||
| Trajectory | (m) | (s) | (m) | Trajectory Smoothness | Total Cost | |
| Optimized trajectory | 0.9165 | 60.93 | 180.28 | 1.0000 | 0.9797 | |
| Real trajectory | 0.9128 | 61.02 | 180.65 | 0.9791 | 1.0000 | |
| Terrain Surface Shown in Figure 23b | ||||||
| Trajectory | (m) | (s) | (m) | Trajectory Smoothness | Total Cost | |
| Optimized trajectory | 6.44 | 0.9143 | 68.04 | 194.59 | 1.0000 | 0.9816 |
| Real trajectory | 6.29 | 0.9085 | 67.92 | 194.02 | 0.9804 | 1.0000 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, K.; Yang, Y.; Fu, M.; Wang, M. Traversability Assessment and Trajectory Planning of Unmanned Ground Vehicles with Suspension Systems on Rough Terrain. Sensors 2019, 19, 4372. https://doi.org/10.3390/s19204372
Zhang K, Yang Y, Fu M, Wang M. Traversability Assessment and Trajectory Planning of Unmanned Ground Vehicles with Suspension Systems on Rough Terrain. Sensors. 2019; 19(20):4372. https://doi.org/10.3390/s19204372
Chicago/Turabian StyleZhang, Kai, Yi Yang, Mengyin Fu, and Meiling Wang. 2019. "Traversability Assessment and Trajectory Planning of Unmanned Ground Vehicles with Suspension Systems on Rough Terrain" Sensors 19, no. 20: 4372. https://doi.org/10.3390/s19204372
APA StyleZhang, K., Yang, Y., Fu, M., & Wang, M. (2019). Traversability Assessment and Trajectory Planning of Unmanned Ground Vehicles with Suspension Systems on Rough Terrain. Sensors, 19(20), 4372. https://doi.org/10.3390/s19204372