1. Introduction
It is well understood that, in the near future, mobile robots will replace many works currently done manually by people. These is mostly dull (moving stuff in warehouse), dangerous (handling hazardous materials), and demanding (lifting heavy items) work. In order ro set the scene for the paper, we take an example of a mobile item dispatch robot whose task is to carry items from one location to another location in an indoor environment. The environment has a lot of obstacles like furniture, walls, moving people, and other robots. The robot has a map of the environment in which the static obstacles and free navigational space are indicated. The robot must avoid collision with these static and dynamic obstacles. For this purpose, mobile robots have a path planning module to generate collision free trajectories from the start to the goal location.
Path planning is a two-step process [
1]. The item dispatch robot would first plan a global path from the start to the goal location. At this stage, total path length is a dominating factor, and only the static obstacles are considered while making the path. Once the global path is generated, the item dispatch robot starts navigating on it. When the robot finds a dynamic obstacle, it should change its trajectory to avoid collision. This is done by the second stage of local planning. The local planner alters the trajectory to avoid collision with obstacles.
However, many path planners have a drawback that the path generated has sharp turns. This is undesired as it might be kinematically infeasible for the robot to execute these sharp turns without stopping or considerably reducing the speed. In addition, the robot’s maneuver on the paths with sharp turns is not natural for people in the vicinity, and they may fail to anticipate the robot’s path, which could lead to collision. A person walking behind the robot may dash into it if the robot suddenly stops to execute a sharp turn. Therefore, smooth paths are desired for robot motion. A robot can navigate the smooth paths at a constant velocity without completely stopping. The smooth paths are natural, and they are safe for the carried payload. Hence, path smoothing is important for safe robot navigation. Path smoothing is even more useful for applications like autonomous robotic wheelchairs to carry patients and disabled people.
We present an algorithm that can smooth the sharp turns of any traditional path planners while ensuring navigational safety. Our approach induces smooth curves thay are tangential to the original path. This tangentiality is important to enable robot navigation at a constant speed. It avoids any jerks or kinks in the path. We optimize the algorithm to generate these smooth induced curves for real-time applications. We mathematically formulate the problem and provide solutions for both 2D and 3D cases. The 2D case applies to UGVs (Unmanned Ground Vehicles), and the 3D case applies to UAVs (Unmanned Aerial Vehicles). We consider a complex distribution of obstacles and complicated maneuvers while discussing the proposed smoothing algorithm. In addition, we verify the accuracy and applicability of the proposed algorithm by providing results in both simulation and actual multi-robots in real environments, and comparing our results with the traditional algorithms.
Researchers have timely tested the existing path planning algorithms in various scenarios. Moreover, researchers have optimized these algorithms to meet the time constraints of real world applications. Therefore, the proposed work is not meant to replace already existing path planning algorithms. Instead, we propose the algorithm as a ‘smoothing extension‘ for already existing algorithms to smooth out the sharp turns.
This is an extension of our previous work [
2]. We thoroughly improve the previous work through mathematical formations, proofs, safe navigation, generating trajectories of specific curvatures, more experiments in both simulation and real world scenarios, and a detailed analysis. We summarize the main characteristics and novel contributions of this work as follows:
The proposed ITC algorithm generates smooth curves that are tangential to the original path. Thus, continuity is always guaranteed.
The smooth curves are infused in the original global path to smooth out the turns. Thus, the original global path is kept intact.
The straight segments of the global path are kept straight and only the sharp turns are smoothed. This is advantageous to keep a safe distance from the walls while navigating a narrow corridor.
Safety is embedded in the ITC trajectories, and robots are guaranteed to maintain a safe distance from the obstacles.
The curvature of ITC curves can easily be controlled and smooth trajectories can be generated fast in real-time.
The ITC algorithm smooths the global path on a part-by-part basis thus local smoothing at one point does not affect the global path.
The path smoothing is possible for both 2D navigation of ground vehicles, and 3D navigation of aerial robots.
We present ITC as a smoothing extension that can work in conjunction with any of the traditional path planners.
2. Induced Tangential Curves: 2D Path Smoothing Case
This section discusses the path smoothing for the 2D case. The 3D path smoothing case is discussed in
Section 5.
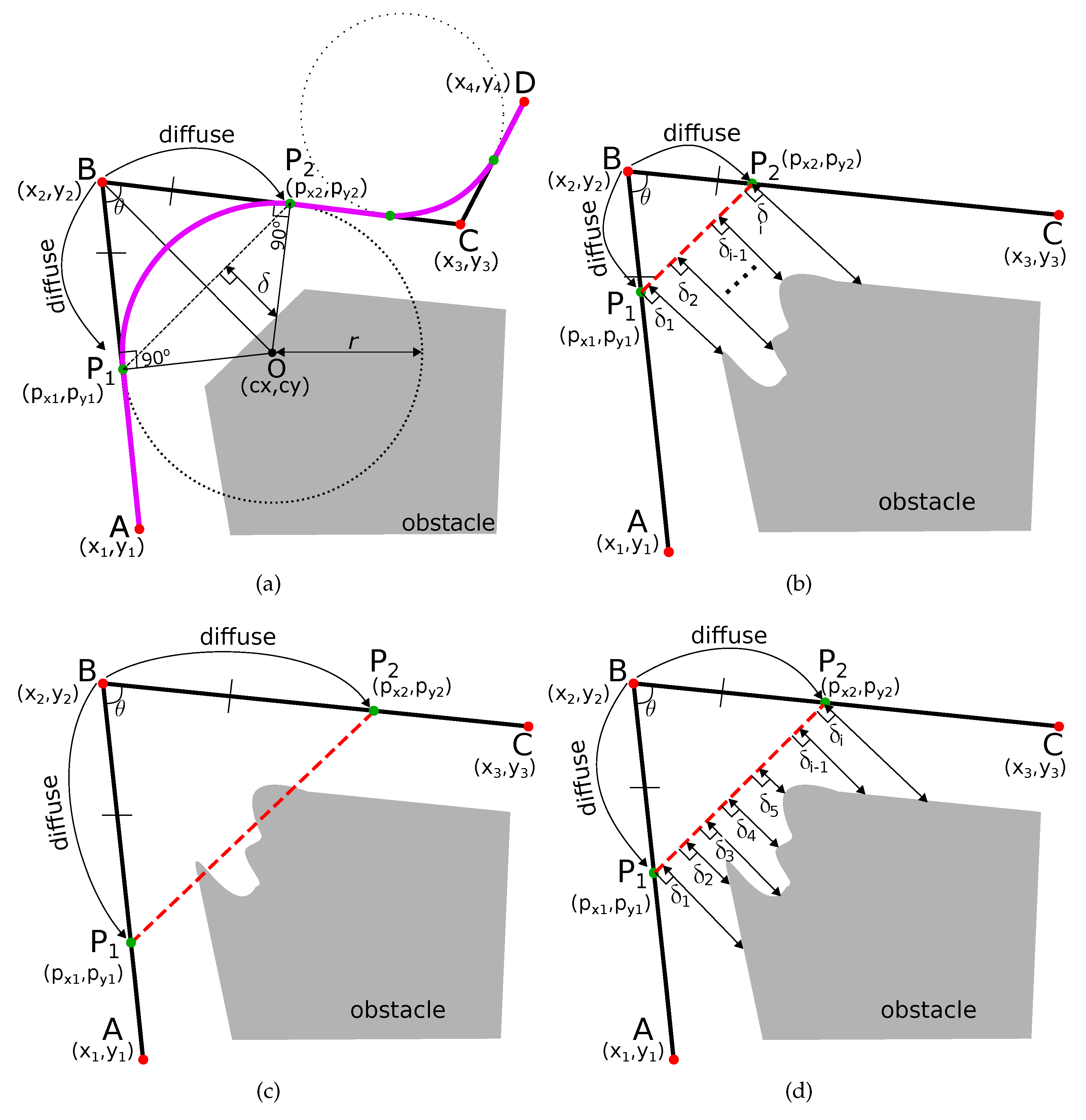
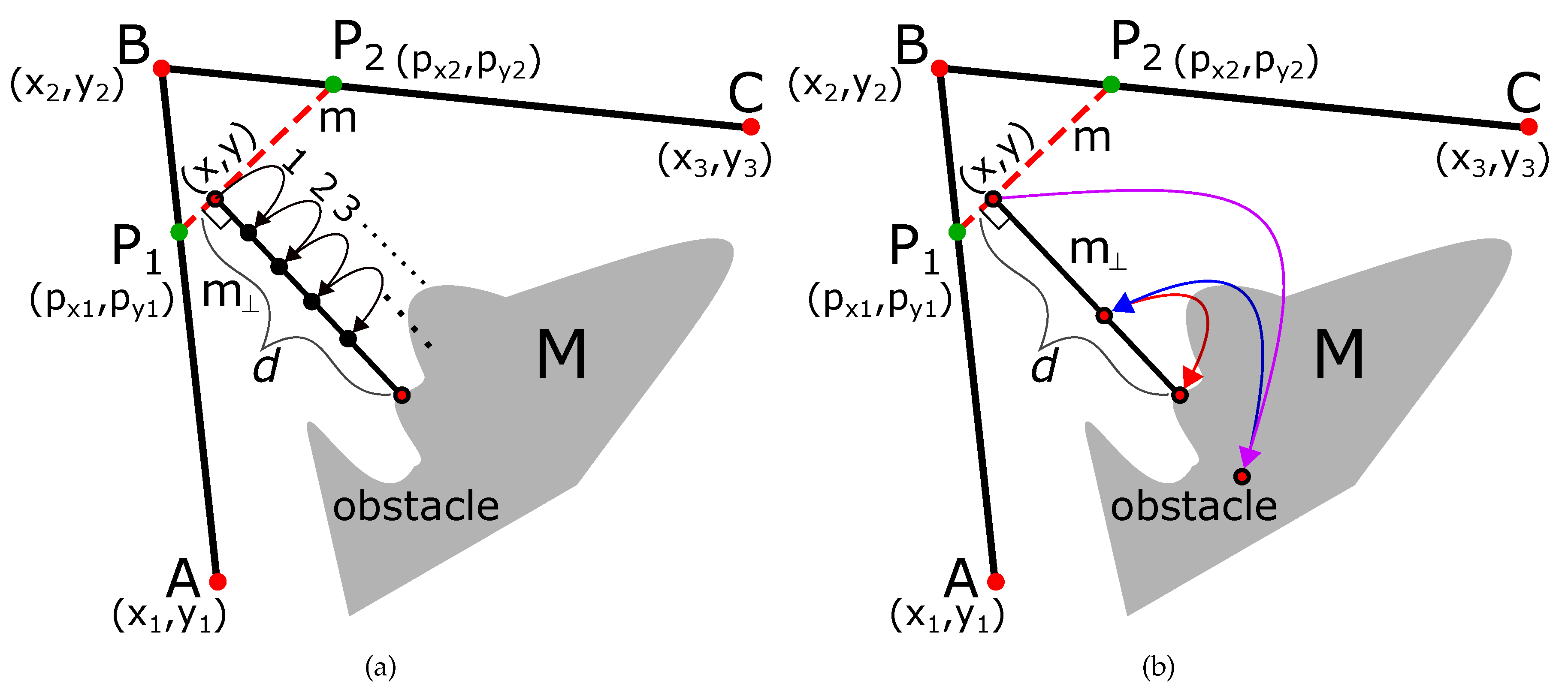
Most of the traditional path planning algorithms generate a path which has many sharp and angular turns. Let us assume that the path
(shown in black in
Figure 1) is a section of the robot’s path with a sharp turn at point B, and point C. The coordinates of the point A (
), B (
), C (
), and D (
) are also shown in
Figure 1a. The obstacle is shown in gray color. The sharp turns at points B and C needs to be smoothed out.
First, we find two points and such that the line joining the two points is at a safe threshold distance () from the obstacle. To find these points, we find intermediate points on the line at a fixed small distance from the point . We fix another intermediate point on the line at the same fixed distance from the point , i.e., = . We define this process of finding intermediate points from the turn-point as ‘diffusion’. The turn point is diffused into points and along the directions and , respectively.
The turn point is diffused into points and along the directions and , such that the line joining the two points is at a safe threshold distance () from the obstacle. If is a set of perpendicular distances from line to the obstacle at different points on the line, then there are three cases for such diffusion.
To find the minimum distance of the line
from the obstacle (
), we discretize the line
into several intermediate points (
) separated by a small distance
, as shown in
Figure 2. We then estimate the distance of the obstacle from each intermediate point (
). The total points are
To find the intermediate point ‘
’ (
) at the distance
from
, we first find the unit vector (
) from the point
to
. The unit vector is
where
and
are the unit vectors in the
and
directions. Point
at a distance
from the point
along the line
is
Splitting up the respective
and
components gives
Thus, the intermediate points are calculated as
We briefly explain the calculation of the minimum distance
from each intermediate point (
). The slope of the line
is
The slope of line perpendicular to the line
is
Using Equation (
6), we generate points on the line from each point (
) with slope
in small units until the point touches the obstacle. Since the process is the same as explained above, we omit the explanation as it is straightforward.
Notice that Equation (
6) is also used to diffuse the turn point
into intermediate points
and
along the directions
and
by the same distance
. Diffusion is stopped when appropriate points are found within the safe distance from the obstacle.
The two diffused points acts are points of contact of an induced smooth curve that is tangential at these points. In order to find the curve, we first find the circle and its radius whose arc will replace the angular path. The center of this circle is the point of intersection of the two perpendicular segments from these diffused points and . The steps are explained below.
The slope of line
in
Figure 1a is
and the slope of line
in
Figure 1a is
In
Figure 1a, the line
is perpendicular to the line
from point
. Hence, the slope of line
is
Similarly, line
is perpendicular to the line
from point
, and the slope of line
is
The point of intersection of lines
and
(point
in
Figure 1a) is the center of the circle whose arc will define the smoothed path.
The general equation of a line of slope
m passing through a point
is
Since the lines
and
intersect at
,
Thus, the
x-coordinate of the center of the circle is
The
y-coordinate of the center of the circle can be obtained by plugging the value of
in the equation of line
or
,
The radius of the circle
r is
The circle with center (
) and radius
r is shown in
Figure 1a. We take the arc
of the circle between points
and
shown in magenta in
Figure 1a. This curve
has the following properties:
Curve is tangential to the robot’s original path. Hence, geometric continuity is guaranteed.
Curve
is smoother to traverse compared to the original path of the robot. In
Figure 1a, the original path of the robot is
with sharp turn at the point
. The smooth path is
.
Curve is ‘infused’ inside the original path of the robot.
Due to the three properties above, is called an ‘Infused Tangential Curve’.
3. Accelerating ITC Path Smoothing Algorithm
The smoothing algorithm is accelerated on two fronts. First, we accelerate the diffusion of the point of sharp turn. Second, we also accelerate the algorithm to estimate the minimum distance from the obstacles. These are explained below.
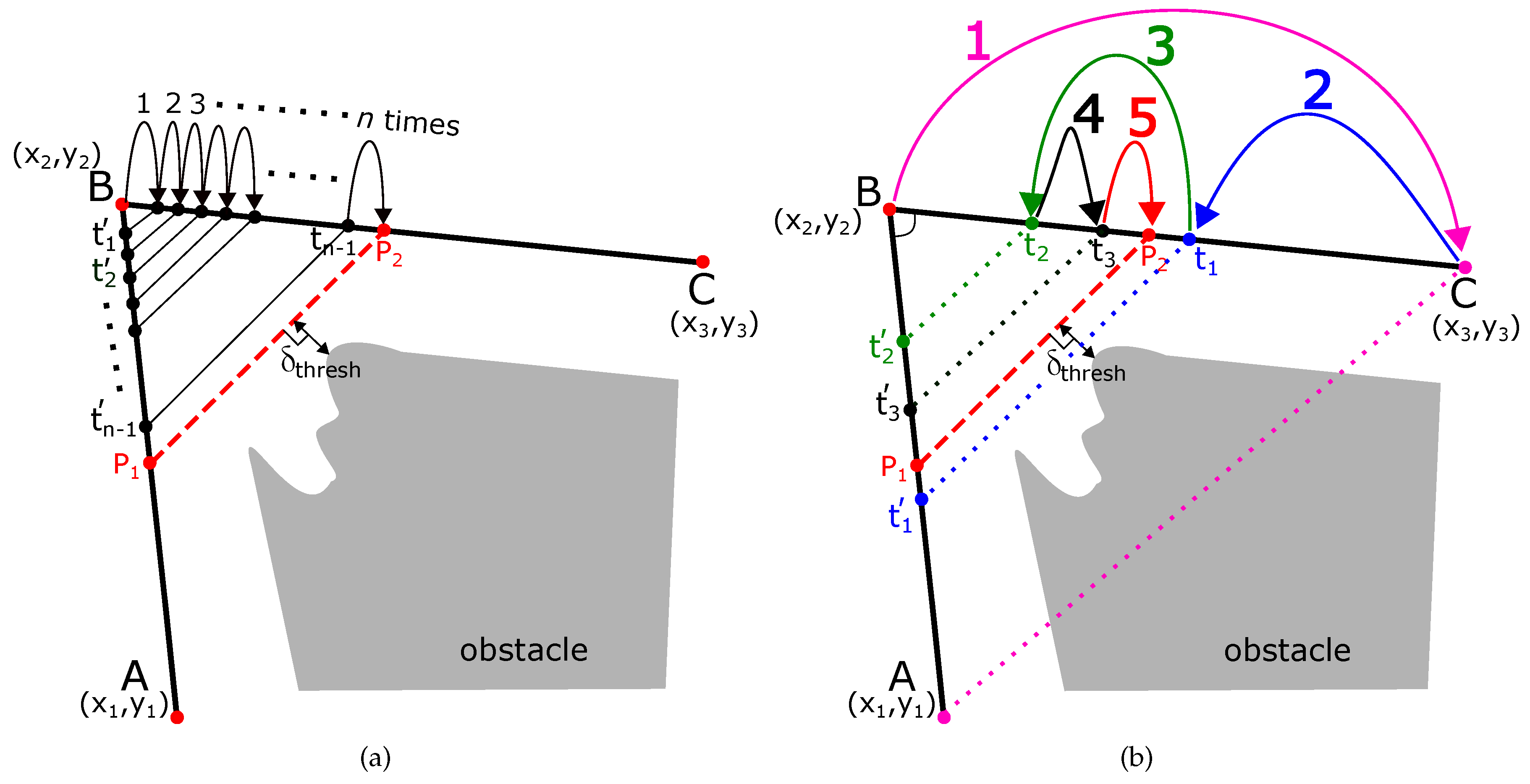
3.1. Accelerating the Diffusion Algorithm
Figure 3a shows the normal approach of diffusing the node
(
) into points
and
. The normal algorithm diffuses the point into small increments of
. As shown in
Figure 3a, if
(
) and
(
) are the appropriate diffused positions which maintain a safe threshold distance (
) from the obstacles, the total steps
are
Hence, normal diffusion algorithm would have a complexity of .
We accelerate the algorithm using binary search. The idea is shown in
Figure 3b, and it is used for explanation. In the binary search, the first diffusion of point
(
) occurs at the maximum distance at point
(
). This is shown by a magenta-colored arrow in
Figure 3b. A check is performed if the line joining the diffused points i.e.,
maintains a safe threshold from the obstacles. As shown in
Figure 3b, the line
crosses over the obstacle, and it is a case of ‘over-diffusion’. Therefore, in step 2, the diffusion distance is half the distance of the previous diffusion (i.e.,
). This is shown by a blue arrow in
Figure 3b, and the safety threshold is checked again. This is again a case of over-diffusion, so, in step 3, the new diffusion distance is half the distance of the previous diffusion (i.e.,
) and shown with a green arrow. A check for safety clearance is performed, and it is determined to be a case of ‘under-diffusion’. Due to this, in the next step 4, the diffusion is increased by half of the previous distance (i.e.,
). This process is repeated until the appropriate diffusion point (
) has been found.
Compared to the normal process, the accelerated algorithm takes steps, and the complexity of the algorithm is . The pseudo-code is given in Algorihtm 1.
| Algorithm 1: Fast Algorithm to Find Diffusion Point |
 |
3.2. Accelerating the Minimum Distance Calculation
Similarly, we also accelerate the perpendicular distance estimation using the binary search algorithm.
Figure 4a shows the normal incremental approach of finding the perpendicular distance from the obstacle on the line with starting point (
) and slope
. The normal algorithm diffuses the point into small increments of
. As shown in
Figure 4a, the total steps
are
Hence, the algorithm has a complexity of .
The accelerated algorithm using binary search is explained in
Figure 4. Since the idea is similar to that explained in the previous section, we omit explanation, and the complexity of the algorithm is
. The pseudo-code is given in Algorithm 2.
The values of
,
, and
are given in Equations (
2), (
17), and (
18), respectively. Compared to the incremental algorithm, the overall speedup is
| Algorithm 2: Estimate Obstacle Clearance |
 |
4. Robot’s Proximity from Obstacles on the Smooth Path
In
Figure 5, the original path
of the robot with sharp turns at points
and
has been smoothed by the path
. Originally, the robot would make a turn at point
keeping a distance
from the obstacle. On the smooth path, the robot comes closer to the obstacle while traversing the smooth green curve, and the distance is
. The proximity difference (shown as
e in
Figure 5) is
. Since the robot itself has some width, the overall proximity to the obstacle will be increased while traversing the smooth curve. Hence, it is important to calculate this difference in proximity.
In
Figure 5, we calculate the
using the cosine law as
In
and
, we have
In other words,
bisects
, and
. In
, point
is the tangent point, therefore
. Therefore,
Hence, the distance
is calculated as
Assuming that the robot has a width of and it accurately traverses the curve, the proximity to the obstacles is increased by a distance . If the proximity of the robot is less than the threshold distance , the diffusion points and are moved closer to the point by a distance of , and the curve is recomputed to ensure safety.
5. Induced Tangential Curves: 3D Path Smoothing Case
We now explain the case of 3D path smoothing for UAVs (Unmanned Aerial Vehicles) and drones. The overall idea for the 3D case is an extension of the 2D case. ‘Node’ or the point of turn is now a point in 3D space. First, the overall path is generated by using traditional path planners. Commonly used robot path planning algorithms like A* algorithm [
3], D* algorithm [
4,
5], potential fields algorithm [
6], Probabilistic Roadmap Planner (PRM) [
7], rapidly exploring random tree algorithm (RRT) [
8,
9,
10], etc. generally have 3D extensions. Hence, any of the traditional algorithms can be used to generate the overall path.
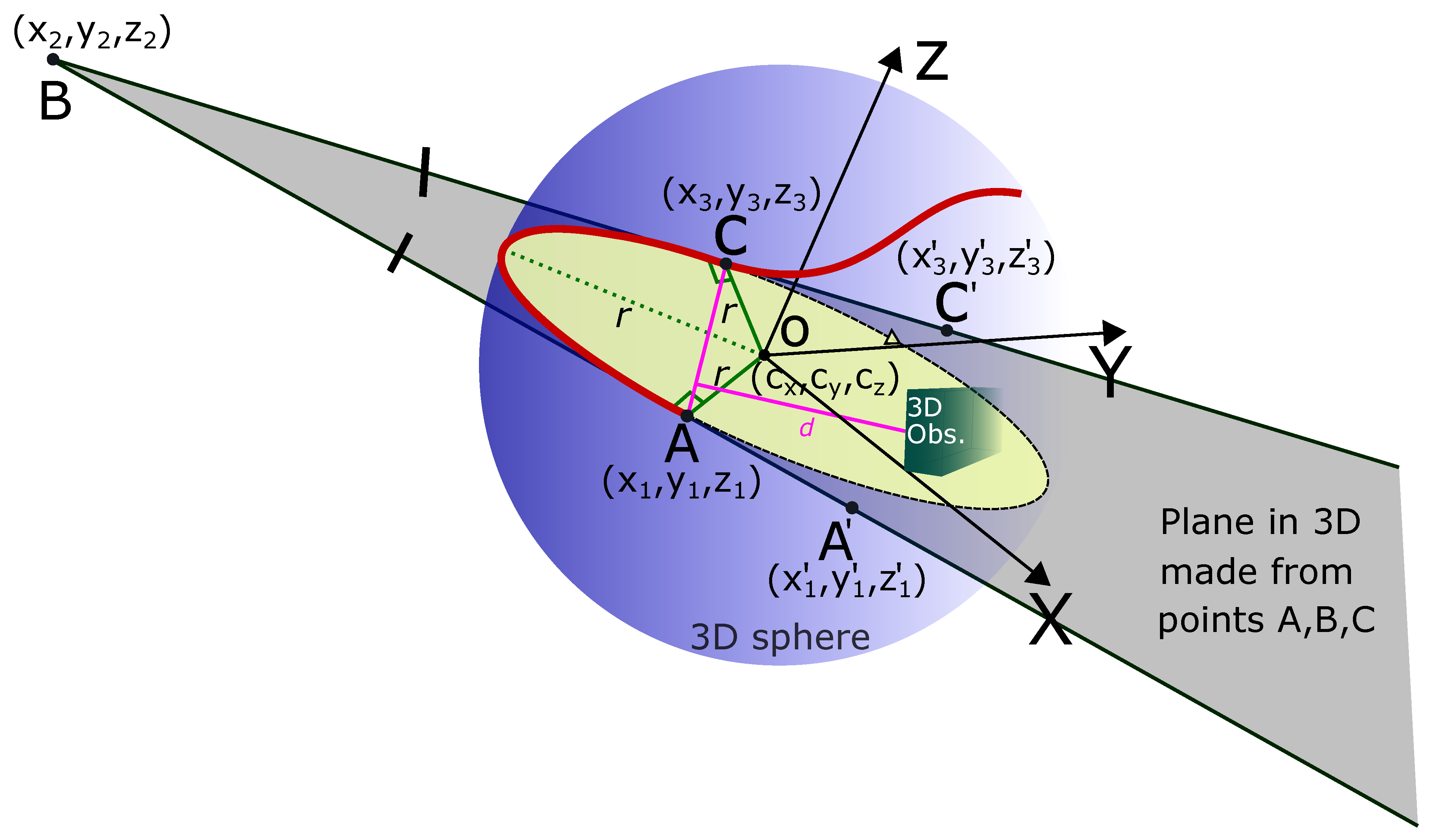
Figure 6 shows three points
,
, and
in 3D space. These points mark the original path of the robot. Point
is the point with sharp turn on the robot’s path. As explained in the previous sections, point B has been diffused to points
and
which are equidistant from point
, i.e.,
. The line joining the two 3D points
is at a safe distance (
) from the obstacle in 3D space shown in green in
Figure 6. The aim is to find the circle (shown in yellow in
Figure 6).
The yellow circle in
Figure 6 lies on the plane which is formed by the three points
,
, and
. The plane is shown in gray color.
The equation of the plane formed by three points is
where
and
The equation of line AB and BC is given as
and
respectively.
The normal of the plane is calculated by taking the cross product,
n is the vector
formed by three of the coefficients from the equation of the plane in Equation (
24). The direction within the plane and perpendicular to
is
Similarly, the direction within the plane perpendicular to
is
A point on these lines can be represented as
The equation of a point which lies on both of them is
We solve for
and
. There are actually three equations, one for each coordinate, and two variables, so the system is over-determined. We can use pseudo inverse to avoid special cases and get the center of the sphere. Once we have the center, we can calculate the radius (
r) of the circle with center
,
As shown in
Figure 6, the plane defined from the points
,
, and
cuts through the blue sphere. The boundary of the intersection of the sphere and the plane is a circle shown in yellow in
Figure 6. The circle can be described with a parametric description, for which we require two orthonormal vectors within the plane. One such vector is
and the other is
Once the circle has been calculated, we take the arc to generate the smooth trajectory. The original path of the robot was . The smooth path is .
6. Experiments and Results
We now discuss the results of path smoothing using the proposed ITC algorithm.
Section 6.1 first shows the 2D results. The 3D path smoothing results are shown in
Section 6.2.
Section 6.3 discusses the comparison with interpolation based smoothing algorithms.
Section 6.4 shows results of smooth path generation with different curvatures.
Section 6.5 shows smoothing results with actual robots in a real environment while discussing a multi-robot collision avoidance scenario.
6.1. Results of 2D Path Smoothing
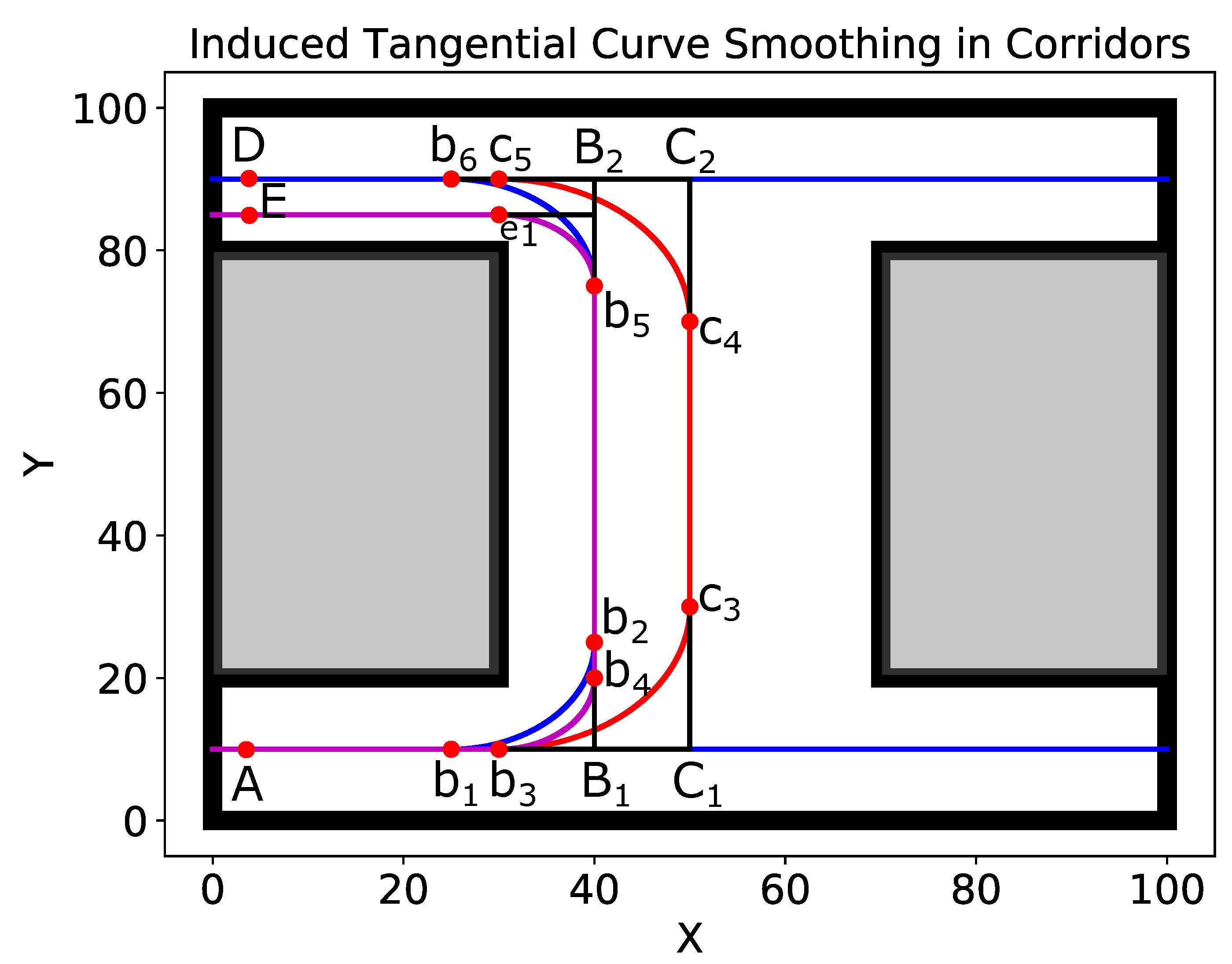
We first discuss path smoothing in indoor corridor environments which are frequently navigated by mobile service robots. Such an environment is shown in
Figure 7 in which the smooth paths are also shown. In such environments, robots generally navigate the center of the corridor maintaining a safe distance from the walls on both sides. On the other hand, some robots are programmed to navigate the corridors on the left or right side. We discuss these cases below.
Case I: As shown in
Figure 7, if the robot is programmed to navigate the center of the corridors, the original path of the robot is
with
as the starting point and
as the goal point.
The path has two 90-degree turns at points and . Two smooth curves and have been induced in the original path. The smooth path is .
Case II: For ‘left-traversal’ robots, the original path of the robot is with as the starting point and as the goal point. This path also has two 90-degree turns at points and . Two smooth curves and have been induced in the original path. The smooth path is .
Two other curves and have also been induced in the original path for different curvature requirements. In any case, all of the induced curves are tangential and guarantee continuity.
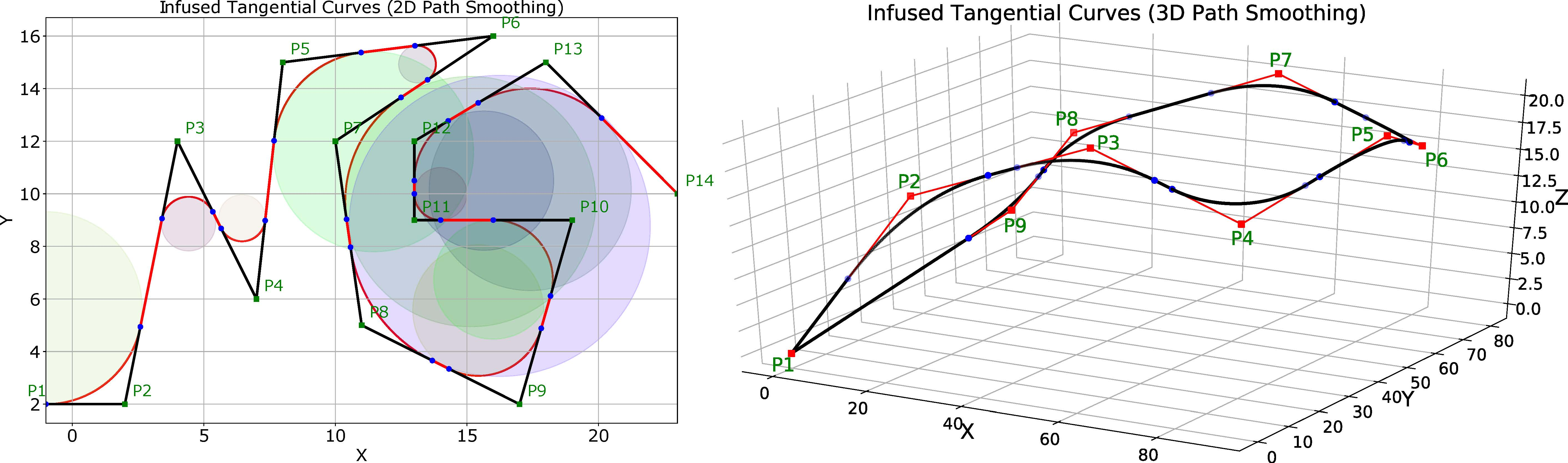
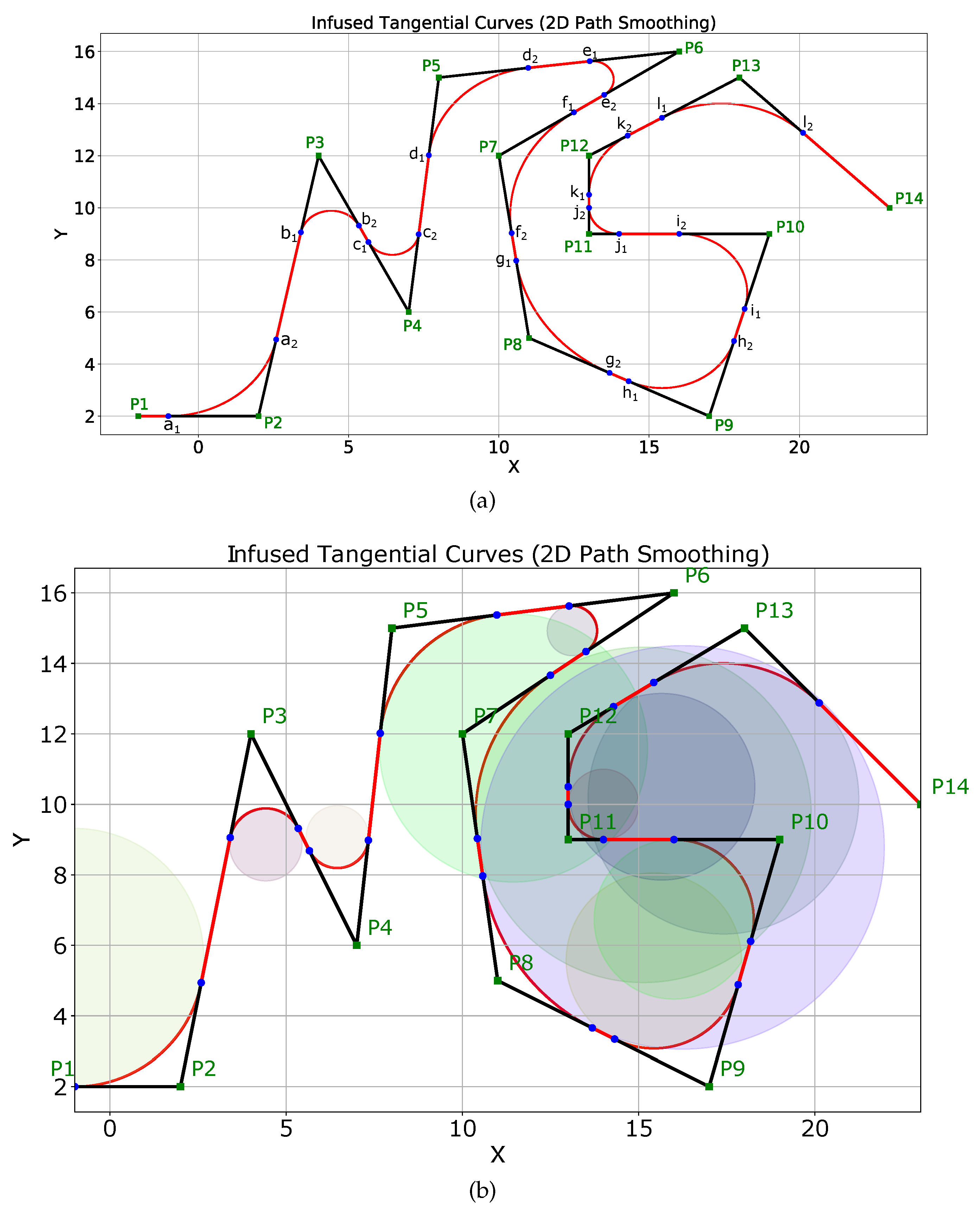
Figure 8a shows a complex scenario with many sharp turns of different angles. The original path of the robot is shown in black with the start point as
and the goal point as
. There are sharp turns at points
, ⋯,
. A major advantage of the proposed ITC algorithm is that it is possible to have a different safe threshold distance (
) at different turn points based on several factors. In the simulation, we fixed different thresholds for different turn points as shown in
Figure 8a. This is evident from the fact that the curvature of different induced curves (
) shown in red in
Figure 8a is different. For example, the curvature of the induced curve
is less than that of curve
, as the safety threshold distance for the curve
(
) was more than the safety threshold distance for the curve
(
).
The curvatures of different curves can also be checked visually from
Figure 8b, which shows the different circles whose segments are used for smoothing the turns. It is also visually evident that
and
are generated from arcs of circles with different radii, and hence different curvatures.
Table 1 summarizes the coordinates of the points and distance thresholds set for the different curves
shown in
Figure 8a.
The threshold distances summarized in
Table 1 should not be confused with the radius of the circles used to generate the tangential curves. The radii of different circles used to generate tangential curves at points
of
Figure 8 are shown in
Figure 9a. Similarly, the curvature of the different ITC curves are shown in
Figure 9b. The ITC curve at point
(
) had the minimum radius of 0.7082 units and thereby the minimum curvature, whereas the ITC curve at point
(
) had the maximum radius and thereby the minimum curvature.
6.2. Results of 3D Path Smoothing
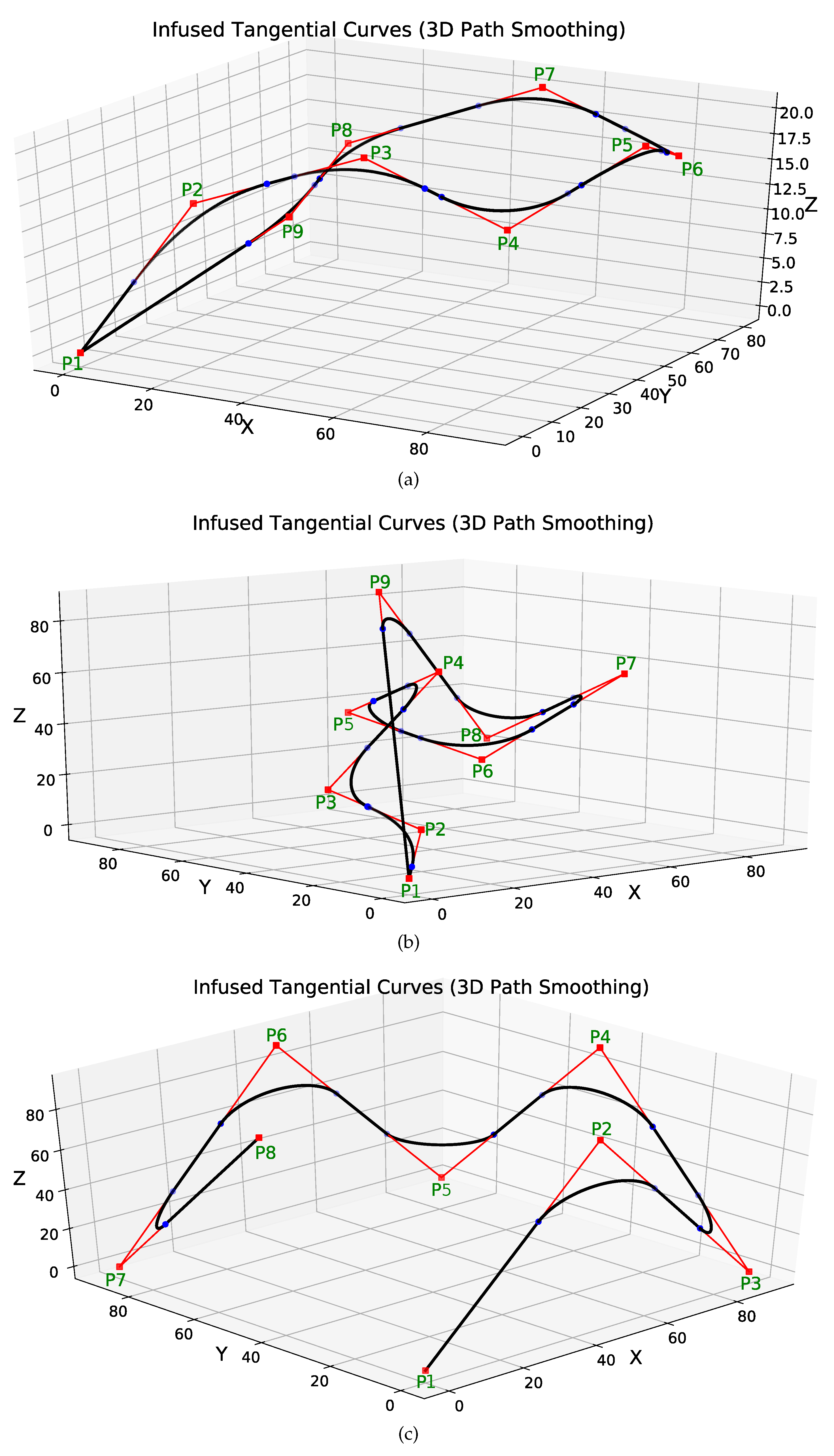
Figure 10 shows three complex scenarios of path smoothing for UAVs in 3D space. The original path of the UAV is shown in red. The smoothed paths are shown in black. The 3D points have been marked in green.
Figure 10a shows the first case of 3D path smoothing. The original path of the UAV is a closed-loop path with the same start and goal points (
). Different values of threshold distances have been used to generate smooth curves of appropriate curvatures. The 3D coordinates of different points and different clearance thresholds have been summarized in
Table 2.
Similarly,
Figure 10b also shows a closed path closed-loop UAV path with the same start and goal points (
). Compared to the path in
Figure 10a, the path is more complex with difficult maneuvers and sharp turns. However, the proposed method is still able to smooth the sharp and angular turns. Different values of threshold distances have been used to generate smooth curves of appropriate curvatures. The 3D coordinates of different points and different clearance thresholds have been summarized in
Table 3.
Figure 10c shows an open-loop UAV path with different start (
) and goal points (
). There are six sharp turns at points
. It is clear from
Figure 10c that the proposed method keeps straight paths of the UAV straight. The turns can be smoothed for different curvatures. In this case, we used the same clearance threshold distance for the different turns. Hence, the curvature of all the smooth induced curves is the same. The 3D coordinates of different points and different clearance thresholds have been summarized in
Table 4.
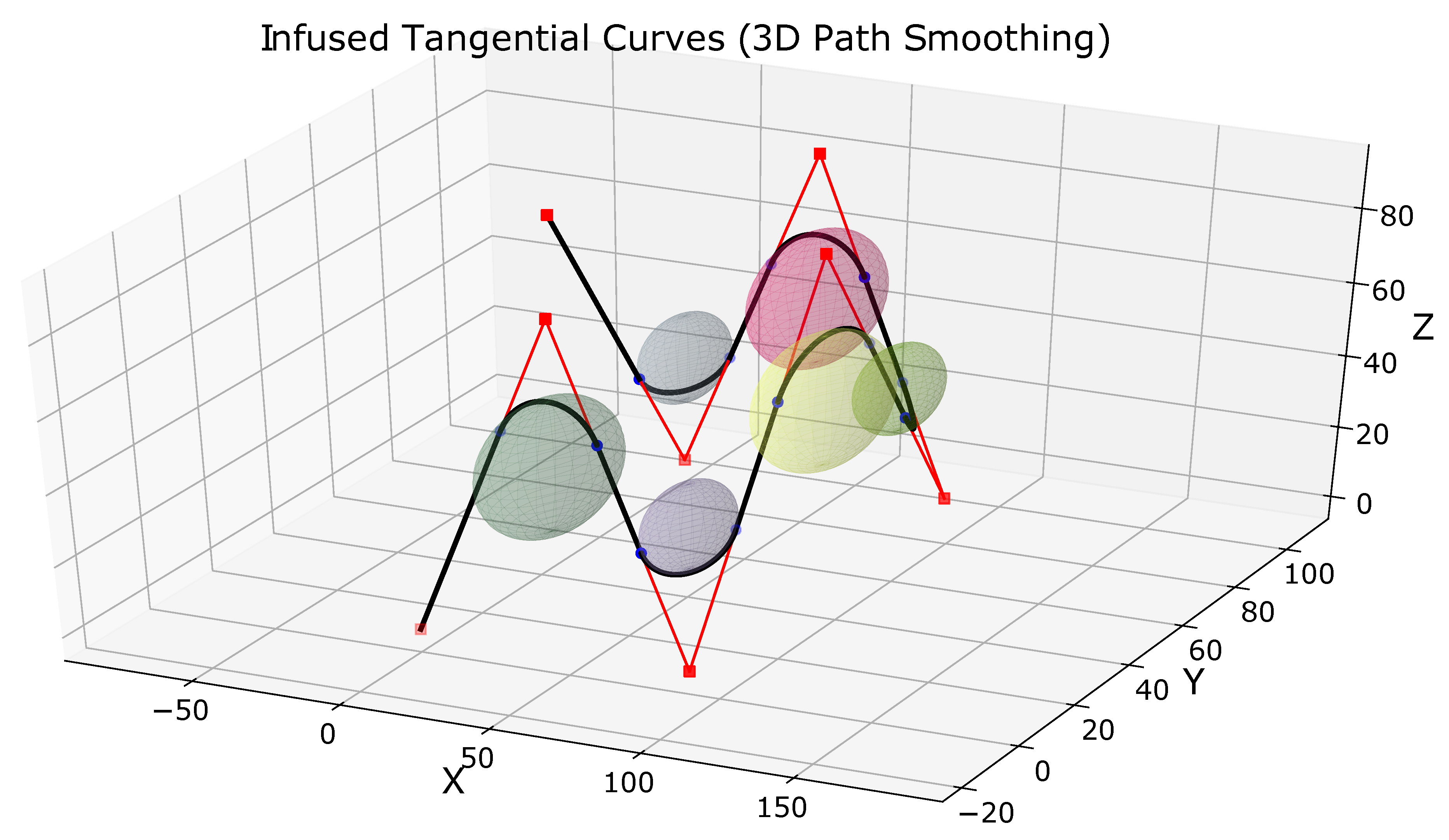
Figure 11 shows the different 3D spheres for path smoothing in case of
Figure 10c. The coordinates of the points are the same as given in
Table 4. In this case, the surface of the 3D sphere is used to smooth out the sharp turns. It should be noted that the spheres in
Figure 11 look like a circle as only a particular projection of the 3D space is shown.
6.3. Comparison with Other Works
In order to compare the strengths of our work, we compare our work with the path smoothing method proposed in the works of Huh and Chang in [
56]. The method proposed in this paper uses an interpolation technique to smooth the sharp turns of the robot’s path. Interpolation technique was first proposed by Warning [
57,
58]. Precisely, given
pairs
, the problem consists of finding a function
such that
for
being some given values, and say that
interpolates
at the nodes
. We speak about polynomial interpolation if
is an algebraic polynomial, trigonometric approximation if
is a trigonometric polynomial, or piecewise polynomial interpolation (or spline interpolation) if
is only locally a polynomial [
1]. As interpolation based methods are widely used in path smoothing algorithms [
41,
59,
60] found in the state-of-the-art, comparison with this method can highlight the merits as well as drawbacks of the proposed method.
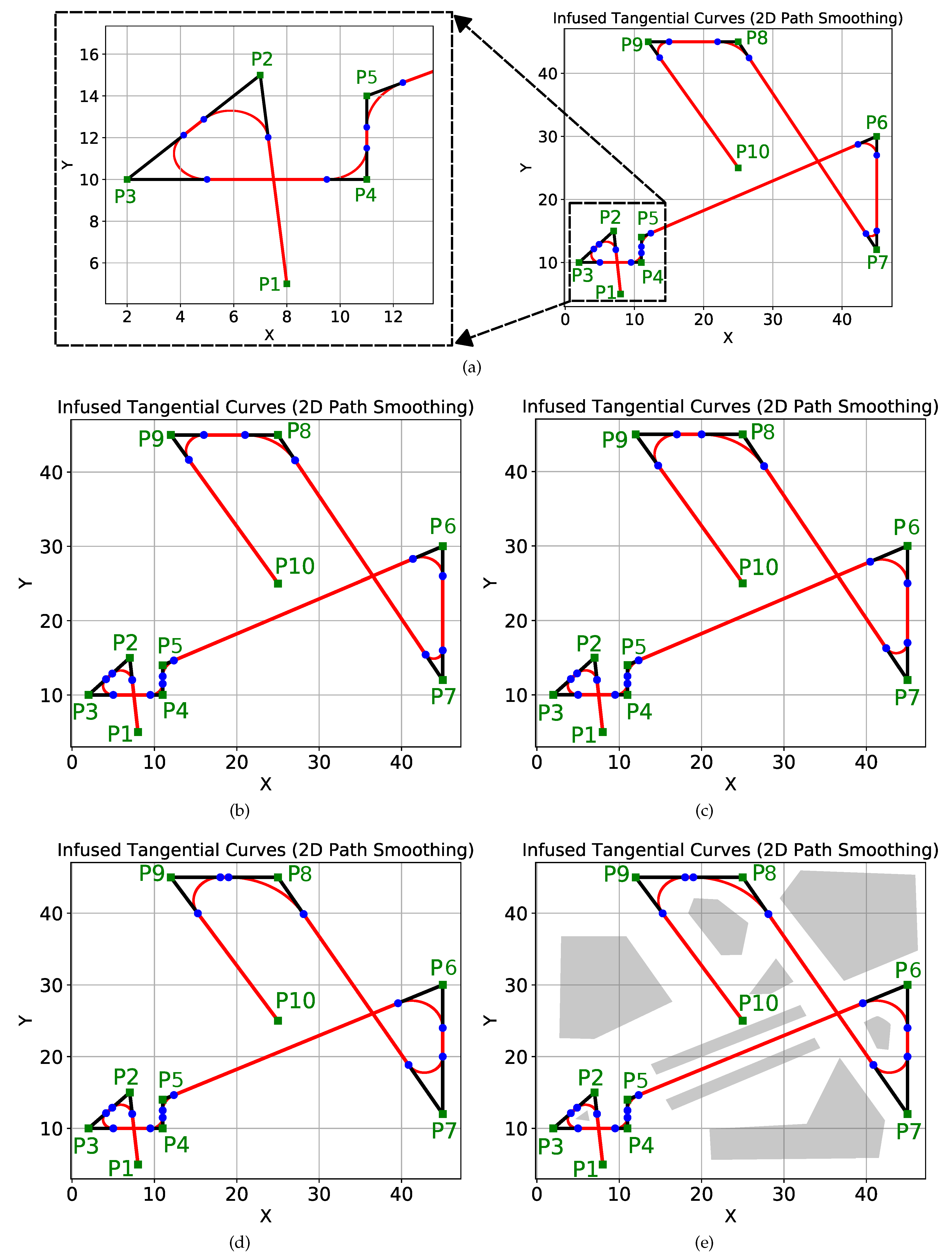
In the comparison, we used the same dataset of points as used in work [
56]. The dataset contains total ten points in a grid of size
units. The 2D coordinates of the ten points have been summarized in
Table 5. As shown in
Figure 12, the ten points (
) are marked in green. The starting point is
, and the goal point is
with many sharp turns at different points. In
Figure 12, the original path is marked in black, whereas the smooth path is shown in red.
To smooth the paths, we used four sets of thresholds. The results of smoothing with different thresholds are shown in
Figure 12a–d. The values of different thresholds along with the 2D coordinates of the points are summarized in
Table 5 for the different figures.
Figure 12a shows the path smoothing with a minimum threshold. The left section of the figure has been enlarged to provide a better view. We successively increased the clearance thresholds in different steps. The consequent smoothing results are shown in
Figure 12b–d. Path smoothing at point
can be seen in different figures to notice the curvature change of the induced curve.
Figure 12e is the same as
Figure 12d, but the obstacles are also shown. Notice that the path between the points
and
is a straight corridor between the walls shown in gray color. A robot traversing this path is expected to maintain a safe distance from the walls and move as straight as possible. The proposed method is able to achieve exactly that goal. The straight paths are kept straight, while only the sharp turns are smoothed out. For comparison, we direct the readers to paper [
56] (page 7, Figure 11 of [
56] to be exact). In work [
56], since interpolation techniques are used, the path between the points
and
is not straight but dangerously close to the walls at multiple points. This also happens at other locations, and the robot’s proximity to the obstacles is compromising safety. Moreover, since interpolation is used, it is difficult to control the curvature of paths, especially at the turns. On the other hand, in the proposed method, it is easy to control the curvature.
However, our proposed method has a disadvantage that
continuity is not possible.
continuity is important for a robot that accelerates significantly on the paths. In fact, the reason why the work in [
56] brings the robot close to one of the walls is because it emphasizes achieving a
continuity. Adjusting a particular point on paths using interpolation is difficult as changing one point changes the whole path. Hence, there is a possibility that adjusting one point to a safe distance brings other portions of the continuous path close to the obstacles. The proposed method only guarantees a
continuity that is tangential continuity. The
continuity is important so that the robot does not experience a sudden kink or bump while traversing from a straight line to a curve.
continuity is important for robots traveling at high speeds. However, most of the service robots have limited speed (generally around 2 m/s) to ensure operational safety. Although ensuring a
continuity is beneficial,
continuity is enough for operations at lower speeds. Since the proposed method only smooths the turns and keeps the straight paths straight, a robot can always navigate the straight segments of the path at high speeds and slow down before approaching a turn.
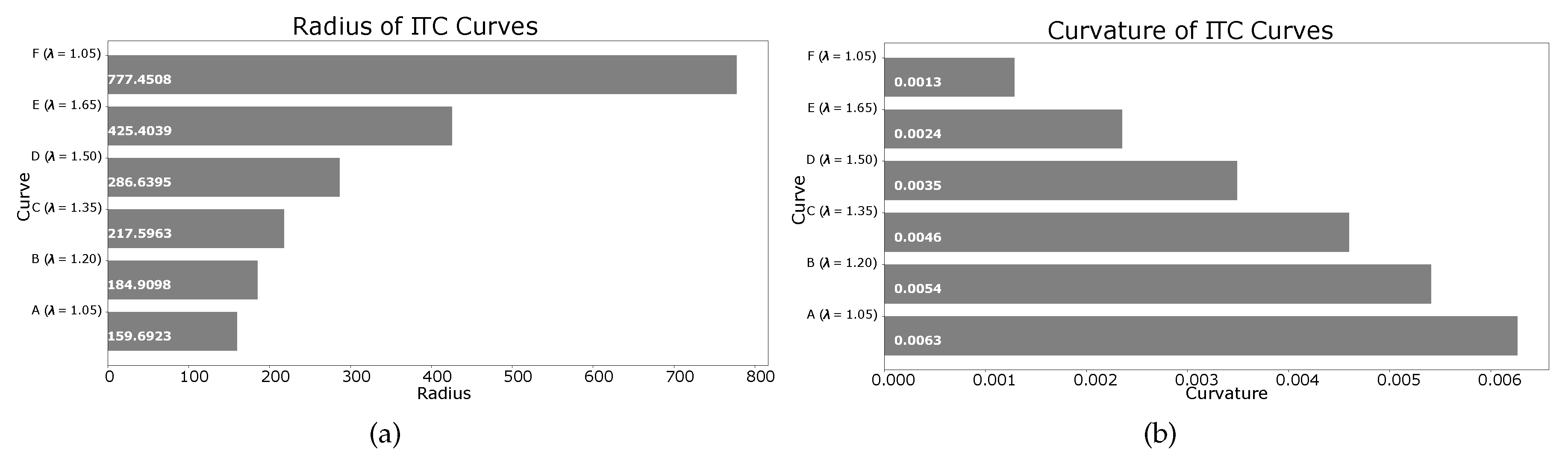
6.4. Generation of Smooth Paths with Variable Curvature
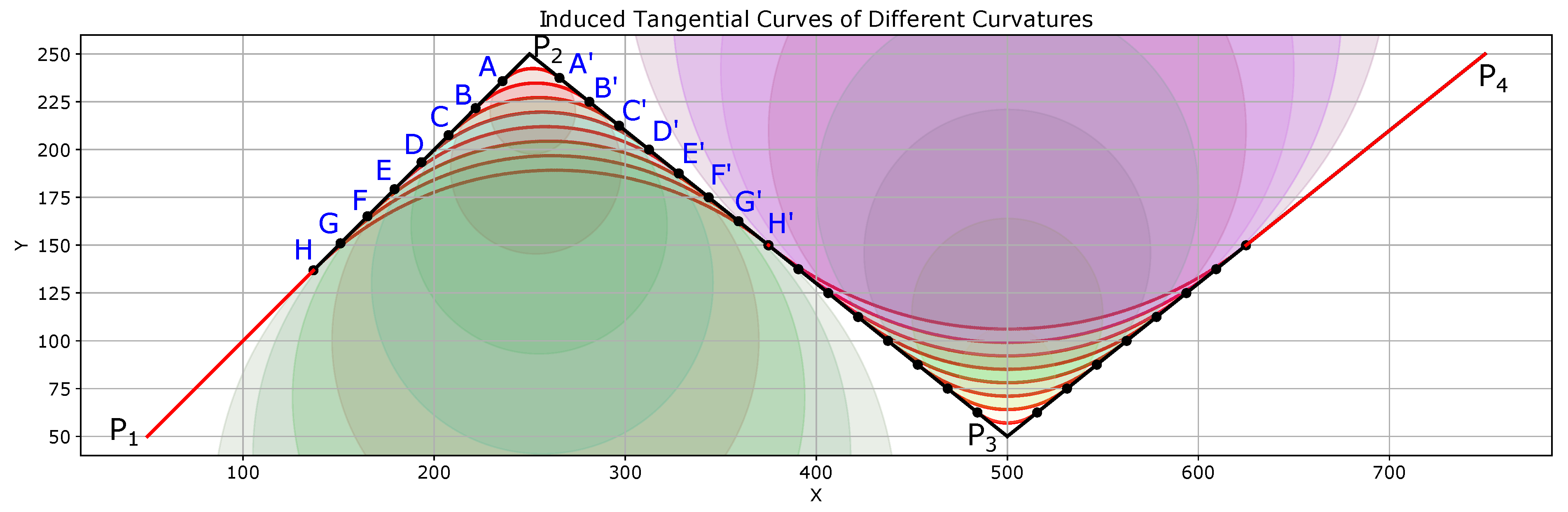
A strong merit of the proposed ITC path smoothing is that the curvature of the smooth trajectories can be controlled easily.
Figure 13 shows the results of path smoothing in which the ITC curves have been generated with different curvatures. The original path is
shown in black color with sharp turns at points
and
. The coordinates of the four points are:
.
As shown in
Figure 13, at the same turn point
, different ITC curves (
,
, ⋯,
) have been generated. The radius and curvature of the different ITC curves are shown in
Figure 14a,b, respectively. Thus, depending on the kinematics of the robot and the configuration of obstacles, appropriate path smoothing can easily be achieved using the proposed method.
6.5. Results of Smoothing in Real Environment with Actual Robots
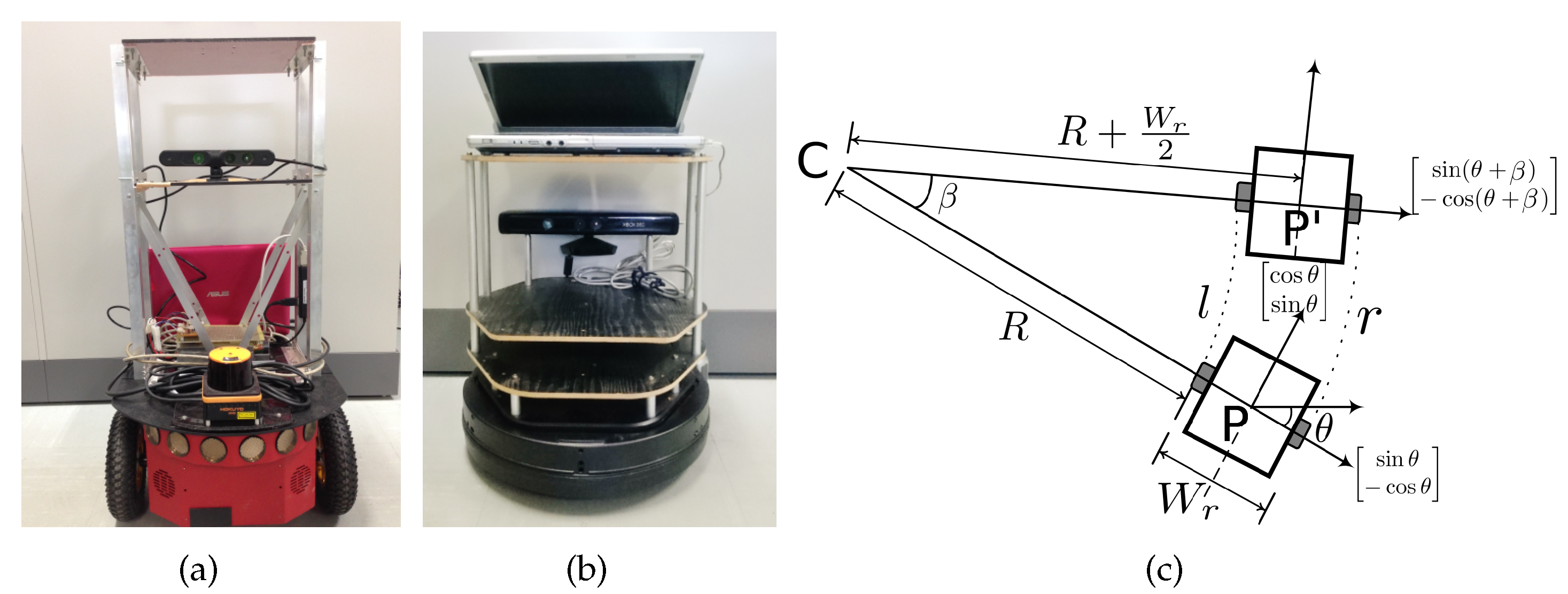
This section discusses results in a real environment with actual robots.
Figure 15 shows the robots used and its motion model. We used a Pioneer-P3DX [
61] robot and Turtlebot robot [
62] shown in
Figure 15a,b, respectively. Both the robots were equipped with distance sensors (Microsoft Kinect [
63] and UHG-08LX laser range sensor [
64]) and cameras. The distance sensor is accurate within
mm within 1 m, and within 3% of the detected distance between 1 and 8 m. The angular resolution is approximately 0.36 degrees, and other specifications can be found in [
64]. Specifications of Kinect sensors can be found in [
63]. The robots were programmed in ROS [
65]. Both are differential drive robots. We adopt the motion model from our previous work [
52] and briefly describe here. The distance between the left and the right wheel is
, and the robot state at position
P, is given as [
]. From
Figure 15c, turning angle
is calculated as
and the radius of turn
R as
The coordinates of the center of rotation (
C, in
Figure 15c) are calculated as
The new heading
is
from which the coordinates of the new position
are calculated as
If
, i.e., if the robot motion is straight, the state parameters are given as
and
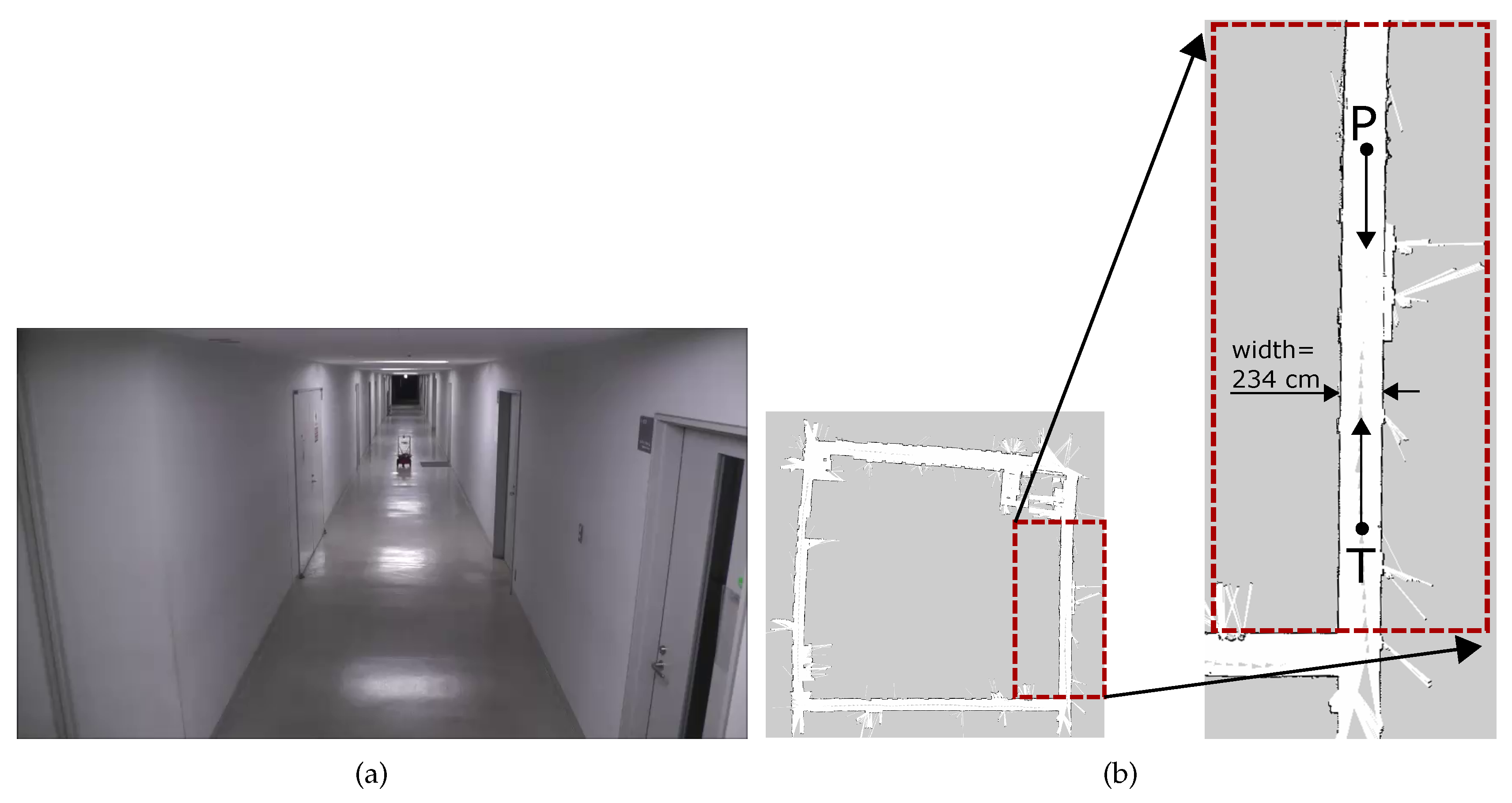
Figure 16 shows the experiment environment and its grid map. As shown in
Figure 16a, the environment was conducted in a narrow corridor of our university. The corresponding grid map is shown in
Figure 16b, in which the actual experiment section of the corridor is marked and shown enlarged.
6.5.1. Non-Smoothed Collision Avoidance and Navigation (Real Environment with Actual Robots)
Path smoothing in open and static environments can easily be demonstrated. However, real-time path smoothing for multiple robots in a dynamic and realistic scenarios is more challenging. We tested the proposed path smoothing method in a dynamic multi-robot collision avoidance scenario. In the experiment, the Pioneer P3DX robot and Turtlebot robot navigated towards each other in the narrow corridor and tried to avoid collision. We compared the trajectories in both traditional (non-smoothed) and the proposed (smoothed) method.
The direction of movement of both the robots is indicated in
Figure 16b. Pioneer P3DX robot robot navigated from North to South direction with the starting point marked as
. The Turtlebot robot navigated in the opposite direction in the same corridor from South to North with the starting point marked as
in
Figure 16b. The width of the corridor was 234 cm, and both the robots were programmed to navigate the center of the corridor (i.e., ≈ 127cm from either of the walls). The threshold collision avoidance distance was set to 4 m. Once an obstacle at this distance is found, the robots were programmed to avoid it using the traditional and proposed smooth algorithms.
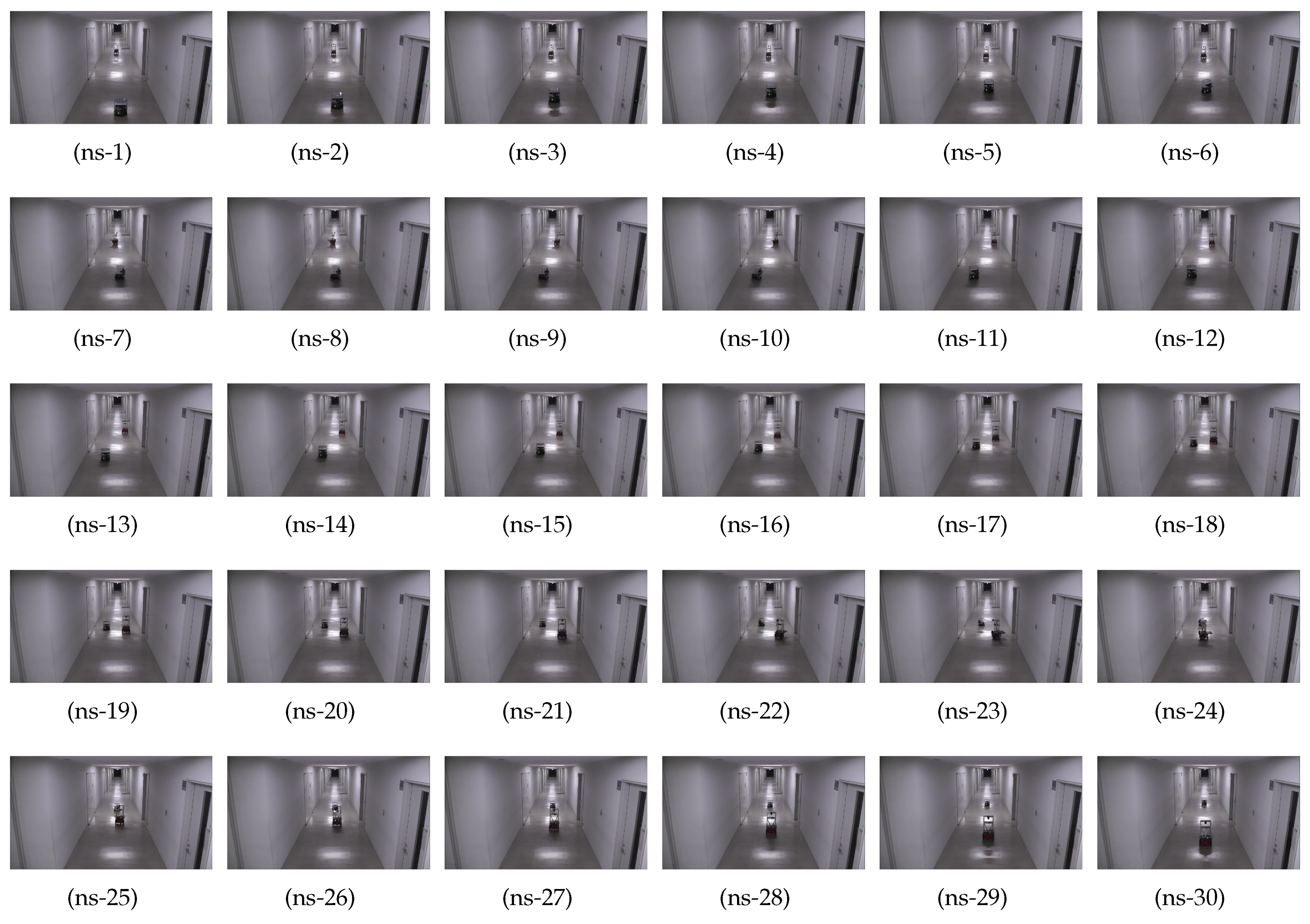
Figure 17 shows the timely snapshots (
Figure 17(ns-1), ⋯,
Figure 17(ns-30)) of the experiment with traditional path planning and navigation. For the ease of readability, we have summarized the various actions take by the two robots at different time-steps in
Figure 17 in
Table 6. The flowchart of the non-smoothed collision avoidance and navigation is shown in
Figure 18a.
In the traditional navigation without smoothing, the robots stopped when the frontal distance was less than the threshold distance. Then, the robots took a sharp 90-degree turn towards the left, moved towards the wall, stopped, and again took a 90-degree right turn. The robots crossed-over, and then repeated the process to come to the center of the corridor from where they continued to navigate towards their respective goals.
Readers are advised to see the
attached video to see the traditional navigation and multi-robot collision avoidance. It is clear that such a robot navigation with abrupt stops, and sharp turns, is not natural, potentially hazardous for the items carried on the robot, and even dangerous for people moving in the vicinity.
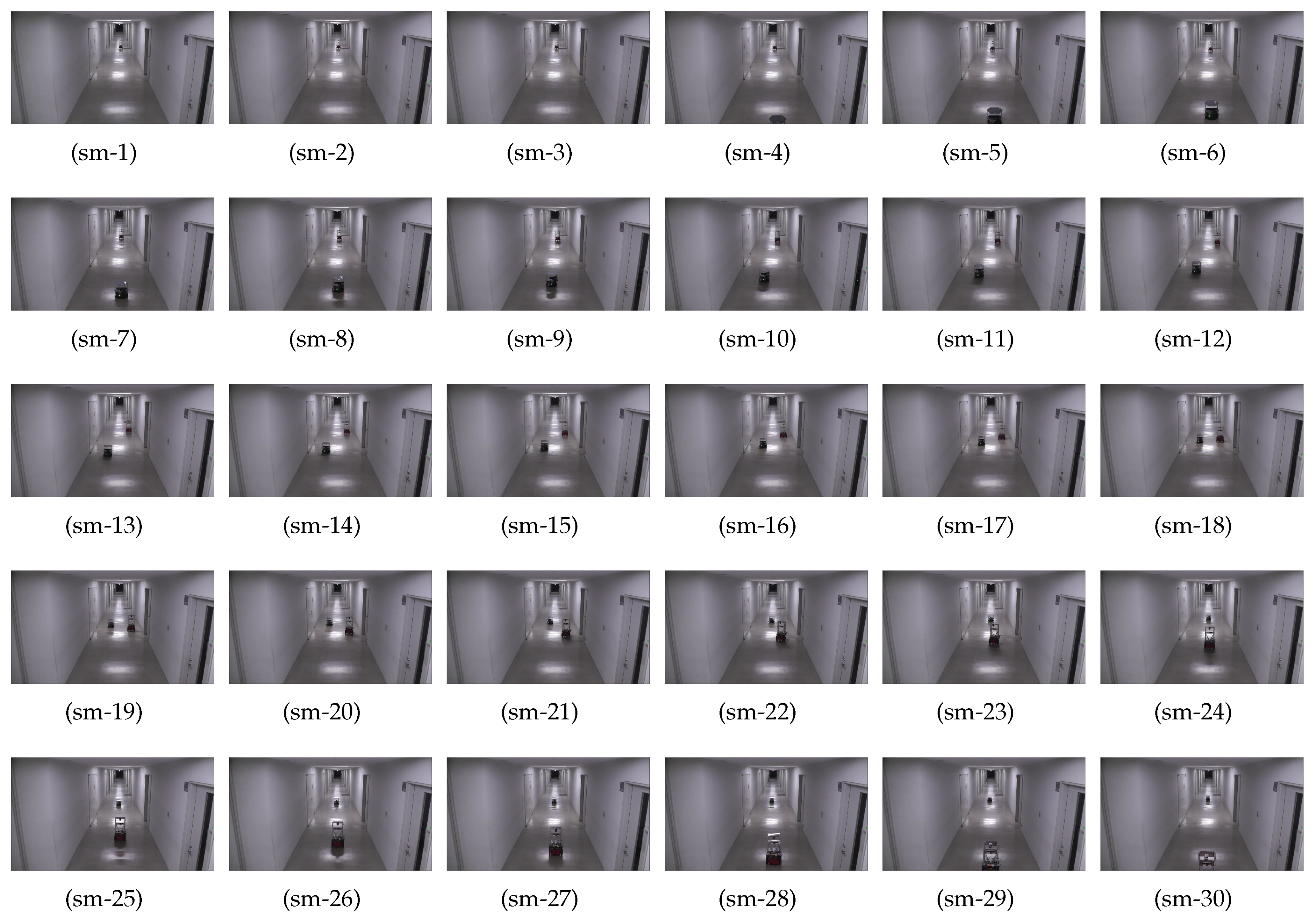
6.5.2. Smoothed Collision Avoidance and Navigation (Real Environment with Actual Robots)
Figure 19 shows the timely snapshots (
Figure 19(sm-1), ⋯,
Figure 19(sm-30)) of the navigation with the proposed smoothing algorithm. The experiment was conducted in the same environment with the same direction, start, and goal locations of Turtlebot and Pioneer robots. The flowchart of the smoothed collision avoidance and navigation is shown in
Figure 18b.
The two robots approached each other while traversing the center of the corridor. When the frontal threshold distance was less than the threshold distance, the robots essentially generated three control points over which the tangential curve could be induced. As shown in
Figure 18b, if
W is the width of the corridor, the robot is traversing the corridor on a line
the robot generates a set (
) of three points:
Essentially, the point and lies on the straight line on the center of the corridor. Point lies on the left side of the corridor. The parameter controls the distance of the trajectory from the left wall of the corridor. For collision avoidance, is generally set to 4, which generates a trajectory at a distance of from the left wall of the corridor. The parameter controls the turning point in front of the robot. The parameter controls the point on the frontal left side of the robot. The effect of the parameter is explained later. From the point set (), an ITC curve is generated and induced in the original trajectory.
Once the robots have shifted left, they move in a straight line and cross each other. Once the robots have crossed over, the robots need to get back to the center of the corridor again. This is done by generating a set (
) of three points:
An ITC is generated again from set (), and the robots smoothly traverse it to come back to the center of the corridor and navigate towards their respective goals.
We have summarized the various actions taken by the two robots at different time-steps in
Figure 19 in
Table 7.
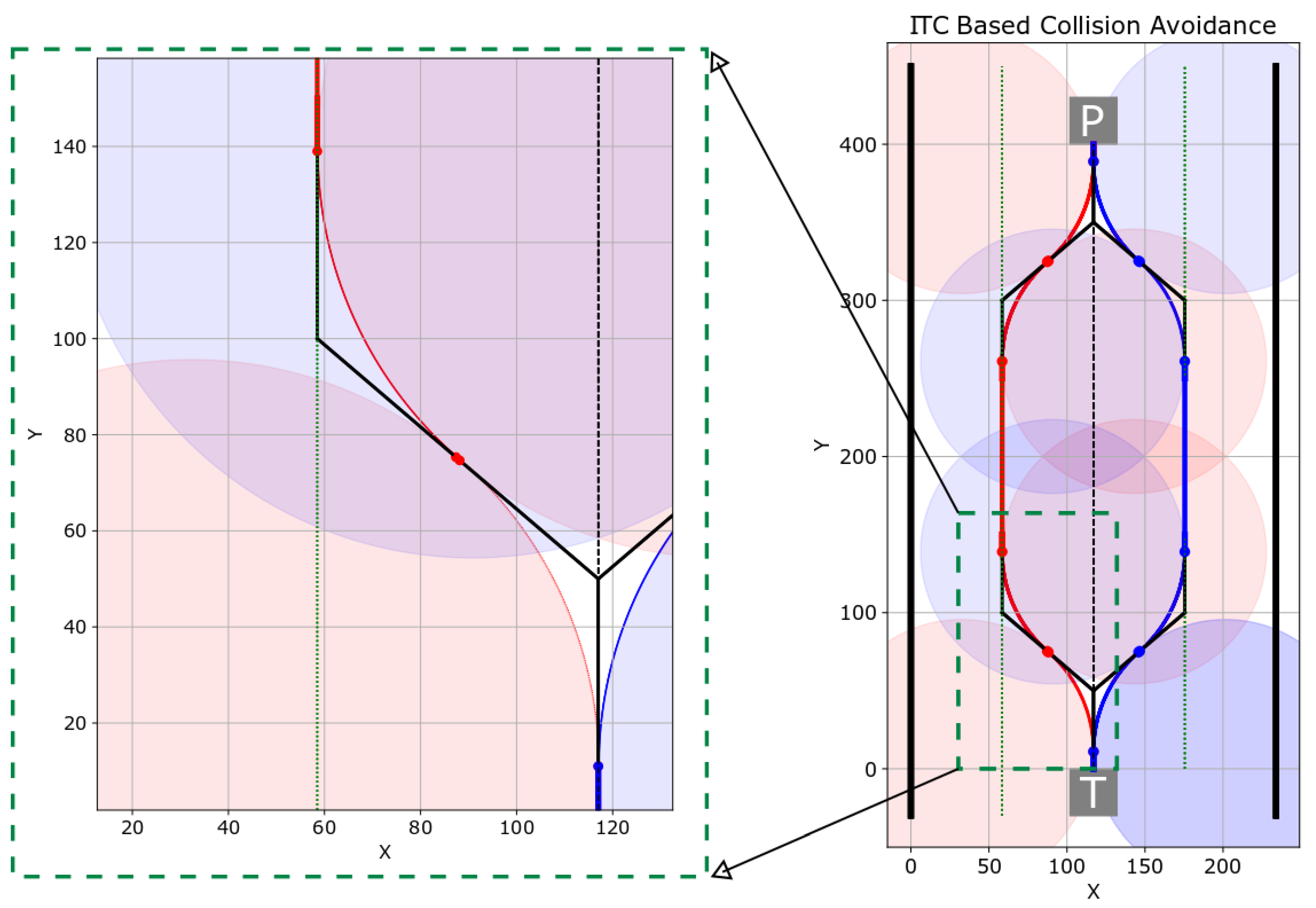
Figure 20 shows the trajectories of the two robots. In
Figure 20, ‘
’ and ‘
’ show the starting positions of Turtlebot and Pioneer robots, respectively. The trajectory of Turtlebot is shown in red, whereas the trajectory of Pioneer robot is shown in blue. The original trajectories are shown in black. As shown in
Figure 16, the width of the corridor was 234 cm, and both the robots initially started from the center of the corridor. The center line is shown as a dotted line in
Figure 20.
In the experiment shown in
Figure 20, we set the parameters
. The Turtlebot’s starting position of turn was (
) and the Pioneer robot’s starting position at a smooth turn was (
). Setting the values in Equation (
42), we get (
) as,
. Similarly, another set of points are generated and the smooth ITC trajectories are generated for both Turtlebot (red trajectory in
Figure 20) and Pioneer robot (blue trajectory in
Figure 20).
Figure 20 also shows a zoomed out section of the trajectory to visually confirm the induced
tangential curves. In the experiment, the same values of both the parameters
and
were set for both of the robots. Hence, the generated trajectories in
Figure 20 are symmetrical. The smooth ITC trajectories were generated in 39.73 ms on Ubuntu 16.04 with Core-i7 processor and 16 GB RAM using Python 3.6 language. This is fast enough for real-time applications.
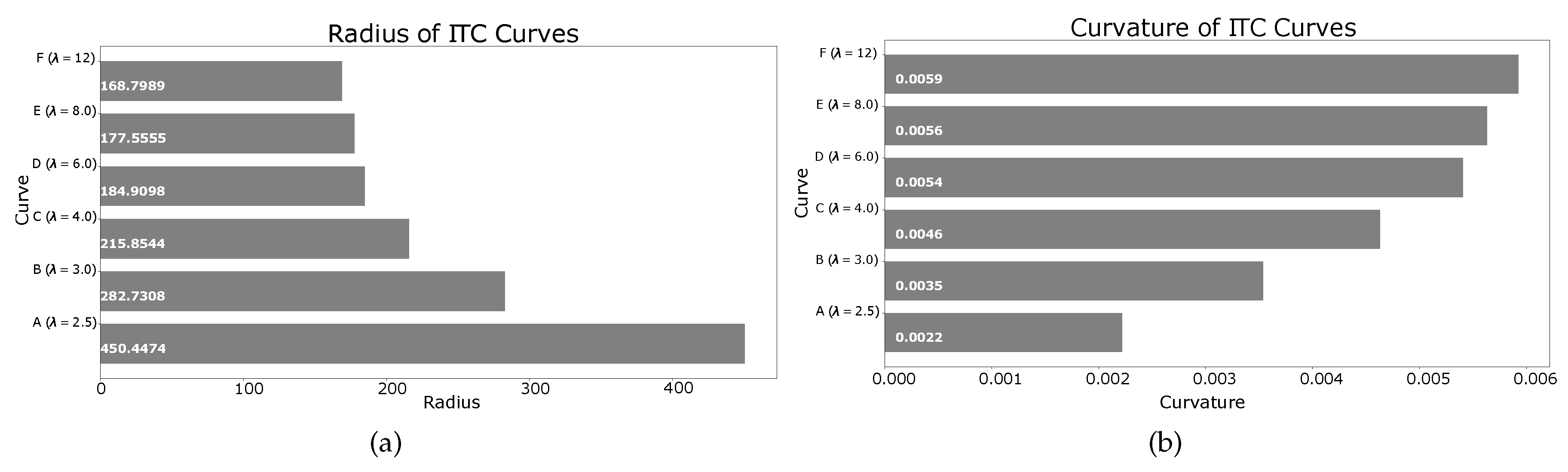
6.6. Effect of on a Smooth Trajectory
We now discuss the effect of parameters
and
on the smoothness of ITC curves. The parameter
controls the robot’s frontal starting point of trajectory generation. Parameter
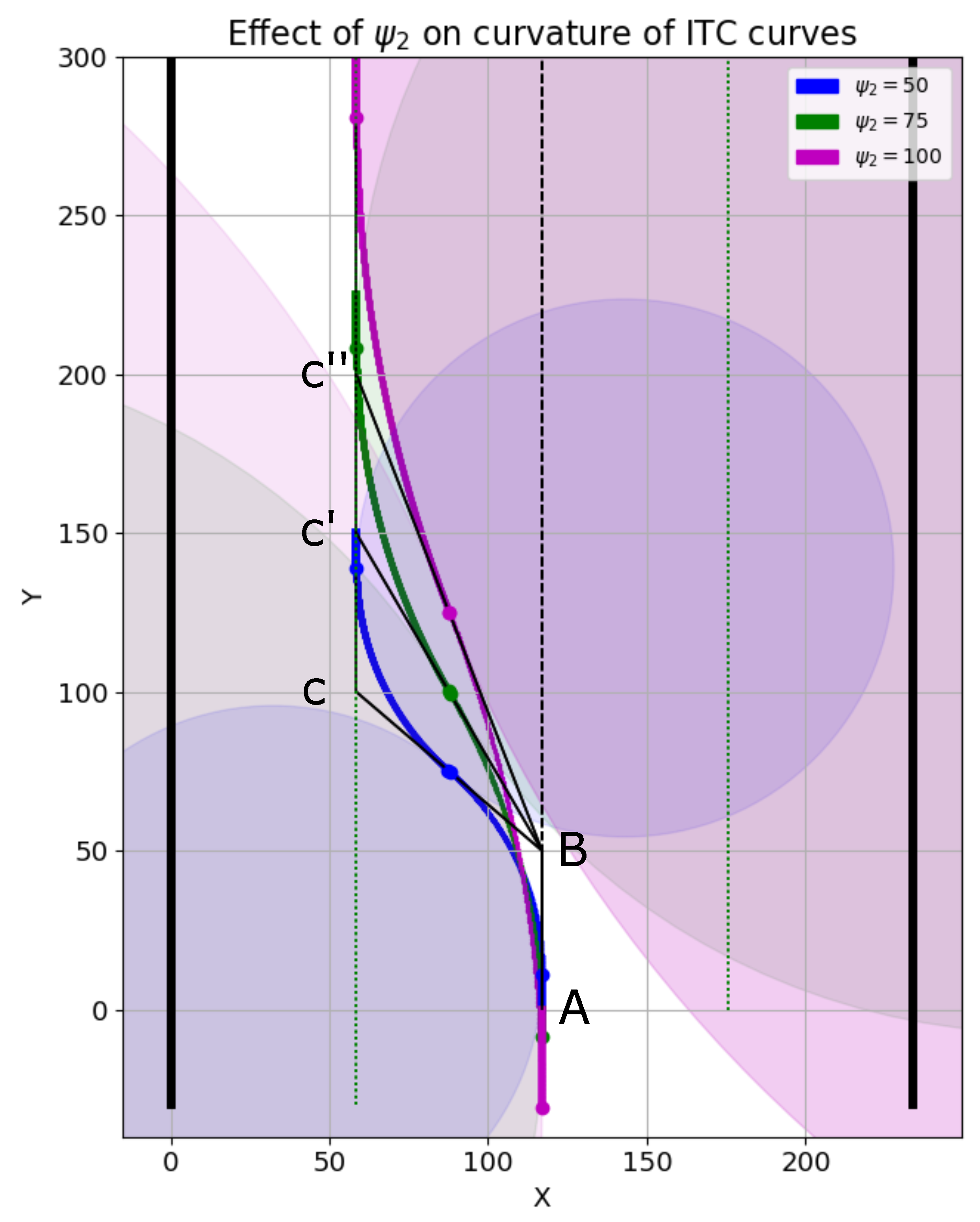
is crucial in controlling the curvature of the smooth trajectories. This is explained using
Figure 21, in which the robot is assumed to be on the center of the corridor shown as a dotted line. Point
marks the starting of the smooth trajectory generation, and the second point
is at a distance of
from point
. The points
,
, and
are generated using different values 50, 75, and 100 of
, respectively.
It should be noted that point
is common for the different ITC curves generated in
Figure 21. However, the values of
were different generating different set of points on the left side of the corridor. The blue ITC curve in
Figure 21 corresponds to
. The green and magenta ITC curves corresponds to
, and
, respectively. The seed point set for blue ITC curve generation was
. The seed point set for green ITC curve generation was:
. Similarly, the seed point set for magenta ITC curve generation was:
.
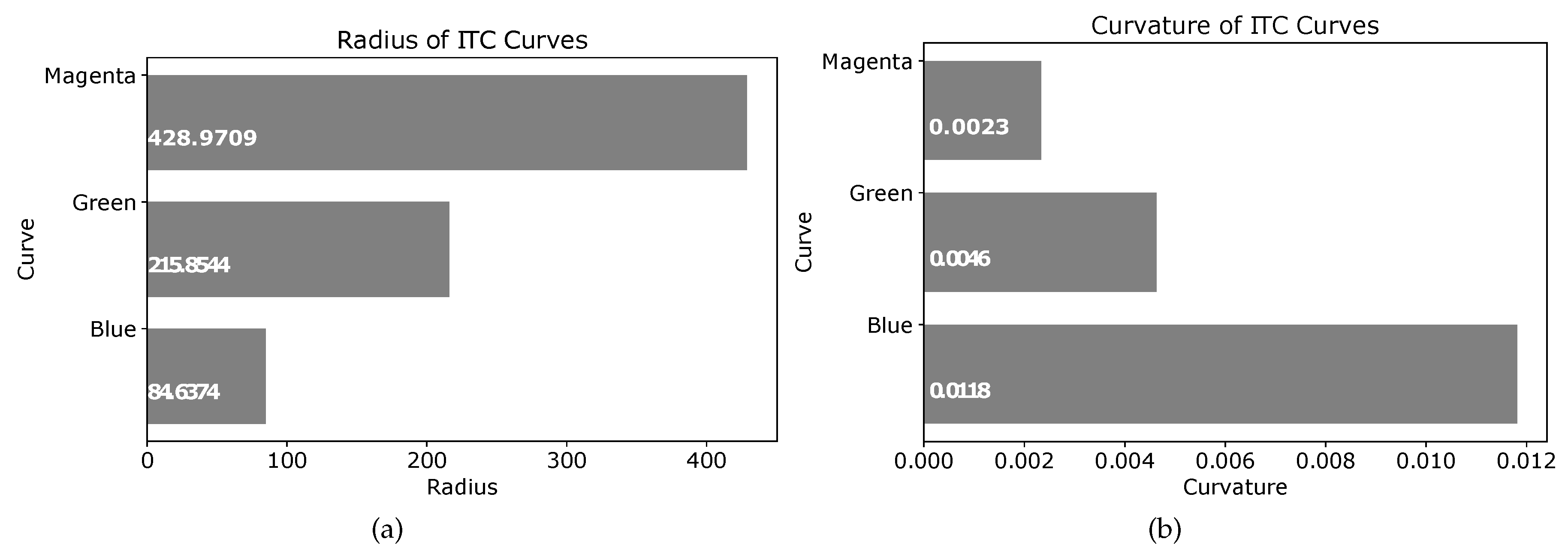
The radius of the three curves seen in
Figure 21 are shown in the plot of
Figure 22a. Similarly, the curvatures of the three curves are given in
Figure 22b. It is clear that increasing the value of
generates an ITC curve with lesser curvature. The actual radii and curvatures of the three curves are shown in
Figure 22a,b, respectively.
6.7. Effect of on Smooth Trajectory
The parameter
in Equation (
42) controls the distance of the trajectory from the left wall of the corridor.
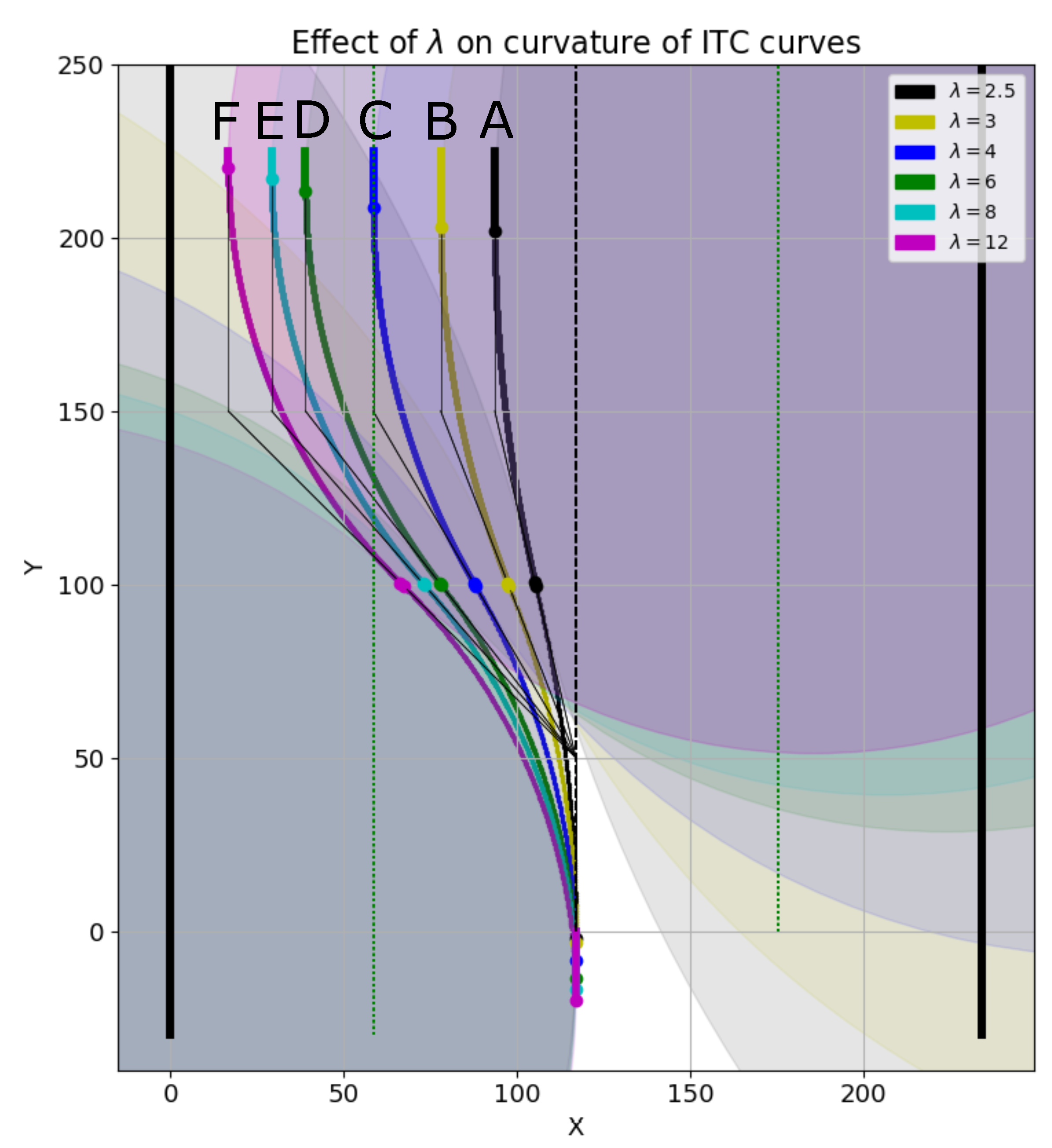
Figure 23 shows the smooth ITC trajectory generation with different values of
. For generating the left turn, the condition is:
where
is the width of the robot, and
is the safety threshold from the corridor’s left wall. Setting
generates points on the straight line in the center of the corridor which does not require smoothing. As shown in
Figure 23, the black ITC curve marked ‘
’ is generated with
, and is closest to the corridor’s center. On the other hand, the magenta ITC curve marked ‘
’ is generated with
, and is the farthest from the corridor’s center and closest to the corridor’s left wall. The other curves with different values of
are also shown. The radii and curvatures of the different curves are shown in
Figure 24a,b, respectively.
The same parameter is also used for generating the smooth right turn of the robot.
Figure 25 shows right turn trajectory generation. The value of
for right turn generation is
As shown in
Figure 25, the black ITC curve marked ‘
’ is generated with
, and is closest to the corridor’s center. On the other hand, the magenta ITC curve marked ‘
’ is generated with
, and is the farthest from corridor’s center, and closest to the corridor’s right wall. Setting
generates a trajectory touching the right wall of the corridor. The other curves with different values of
are also shown. The radii and curvatures of the different curves are shown in
Figure 26a,b, respectively.
Thus, depending on the width of the robot and the obstacle ahead, appropriate value of can be chosen to avoid collision, for both right and left turns.
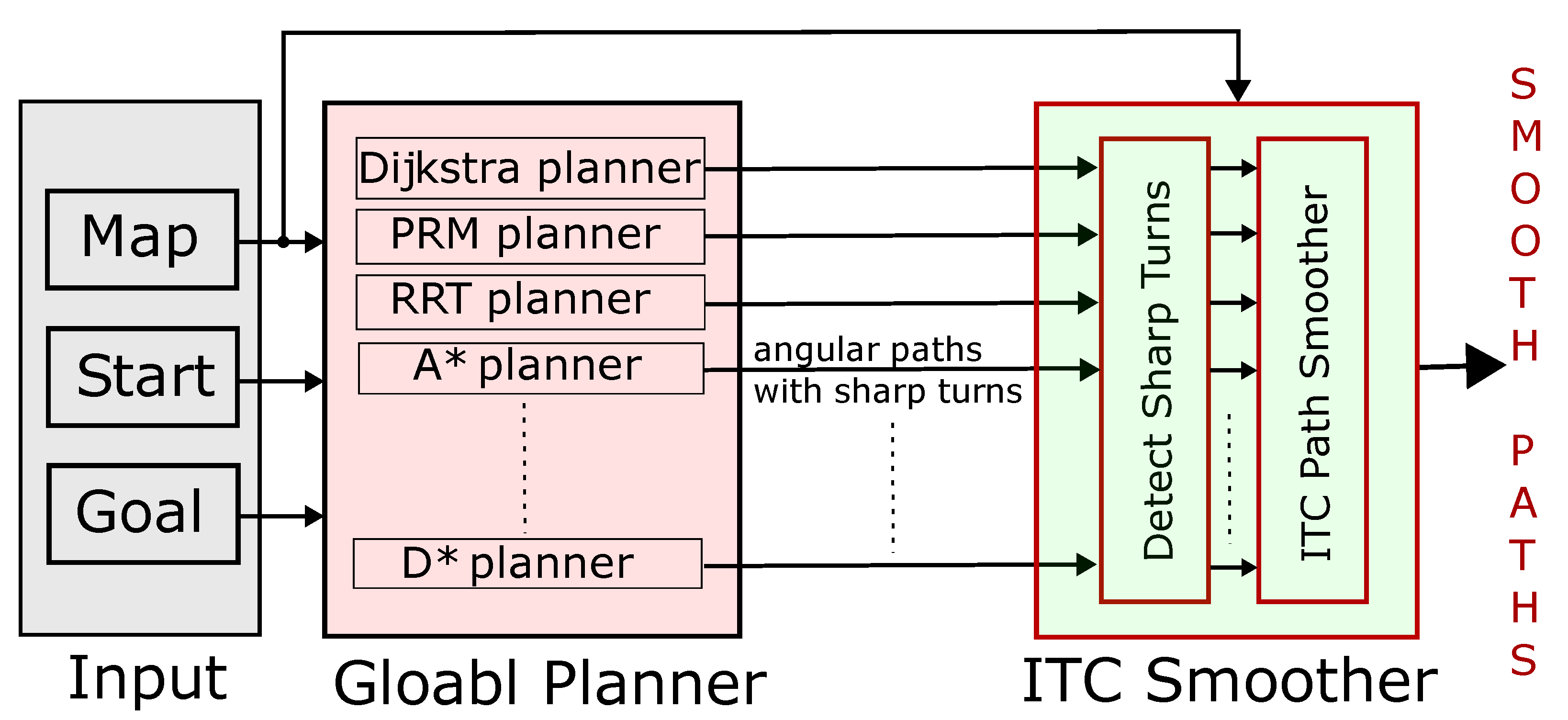
7. ITC as a Path Smoothing Extension
An ITC path smoother is proposed to work in conjunction with traditional path planning algorithms, and not to replace them. The overall idea of ITC as an ‘extension’ is shown in
Figure 27. The input to the global path planner is: (a) map with obstacles and free space marked, (b) start, and (c) goal location in the map. Any of the global path planners like A*, D*, PRM, or RRT path planners can be used. The output of the global path planner is the input to the proposed ITC path smoother. The ITC smoother first detects the sharp turns and then smooths only the turns while keeping the straight segments straight. It can be seen in
Figure 27 that the map information is also input to the ITC block. This is because ITC trajectories are generated keeping a safe distance from the obstacles. Thus, a map which marks the location of obstacles is required. The outputs of the ITC smoother are smooth trajectories whose angular turns have been smoothed out. In this way, the proposed ITC algorithm can be used as an extension with existing planners. A major benefit of such extension is that there is no need to replace the already tested planning algorithms used with the robots. The embedded software used in robot platforms is generally tightly coupled with the hardware and replacing the existing algorithms with new algorithms is generally avoided unless absolutely necessary as additional testing and benchmarking must be performed for the new algorithm. In this regard, the proposed ITC extension will integrate easily with existing algorithms. In addition, there is a lot of scope to customize the ITC smoother as generation of smooth trajectories is done on a part-by-part basis and there is much less computational overhead.
8. Conclusions
We presented a new algorithm called ITC for smooth trajectory generation for mobile robot robots. The algorithm can smooth out the sharp turns in the path generated by the global path planner. The trajectories generated by the algorithm are tangential to the path, thus preserving continuity. The curves can be generated fast in real-time by using only three key points on the path. Safety is embedded in an ITC algorithm, and it is guaranteed that the robot maintains a safe threshold distance from the obstacles, which is a crucial feature of mobile robot navigation. An essential feature of the algorithm is that only the turns are smoothed out, while the straight paths are kept straight. This feature is highly desired in case of mobile robot navigation in narrow corridors. We discussed ITC curve generation for both 2D path smoothing for UGVs, and 3D path smoothing for UAVs.
We compared the proposed ITC algorithm with interpolation based approaches. The comparison shows that ITC paths maintain a safe distance from the walls of the corridors and enables the robot to move in the center. Unlike interpolation algorithms, it is easier to define the control points in ITC algorithm. Moreover, unlike interpolation based methods, changing one point does not alter the whole path. This is another merit of the proposed ITC algorithm—that it is easy to define control points, and smoothing is done on a part-by-part basis for each turn. Thus, smoothing one section of the path with sharp turns does not affect other paths. It is difficult to follow such an approach in interpolation based algorithms as smoothing has to be done on a global basis, otherwise discontinuities or kinks get introduced in the overall path. The proposed ITC algorithm has a disadvantage that continuity is not guaranteed. This may be a limitation for mobile robots moving at high speed. However, for lower to medium speed robot navigation, this is not a problem. In fact, robots can traverse the straight sections of the ITC path with high speed, and slow down at the turns while executing a smooth turn, which is normally the case seen in robot’s navigation to ensure safety due to a change in view, and the sudden appearance of moving obstacles at turn points. We showed how ITC curves can be generated for different curvatures for smooth left and right turns by easily defining the parameters. Finally, we showed a complex real world scenario of collision avoidance with real robots. We compared the traditional navigation of the robots for collision avoidance with the proposed ITC based navigation and collision avoidance. It was clear that traditional navigation required the robot to stop and execute sharp turns. However, the ITC based navigation was smooth, natural, and robots could avoid collision by computing the smooth trajectories in real-time. Our current work presented a real-world 2D navigation of mobile robots and complex scenarios of collision avoidance. In the future, we will test the algorithm with multiple UAVs. A ground robot’s 2D navigation and collision avoidance will be compared to other algorithms with actual robots. In addition, apart from collision avoidance, we also consider trajectory smoothing of robotic arm manipulators as future work.

 ,
, 






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}