NLOS Identification and Positioning Algorithm Based on Localization Residual in Wireless Sensor Networks



Abstract
1. Introduction
2. System Model
3. The Proposed NLOS-AN Identification and Localization
3.1. System Error Analysis
3.2. Threshold Determination and NLOS-AN Identification
- (1)
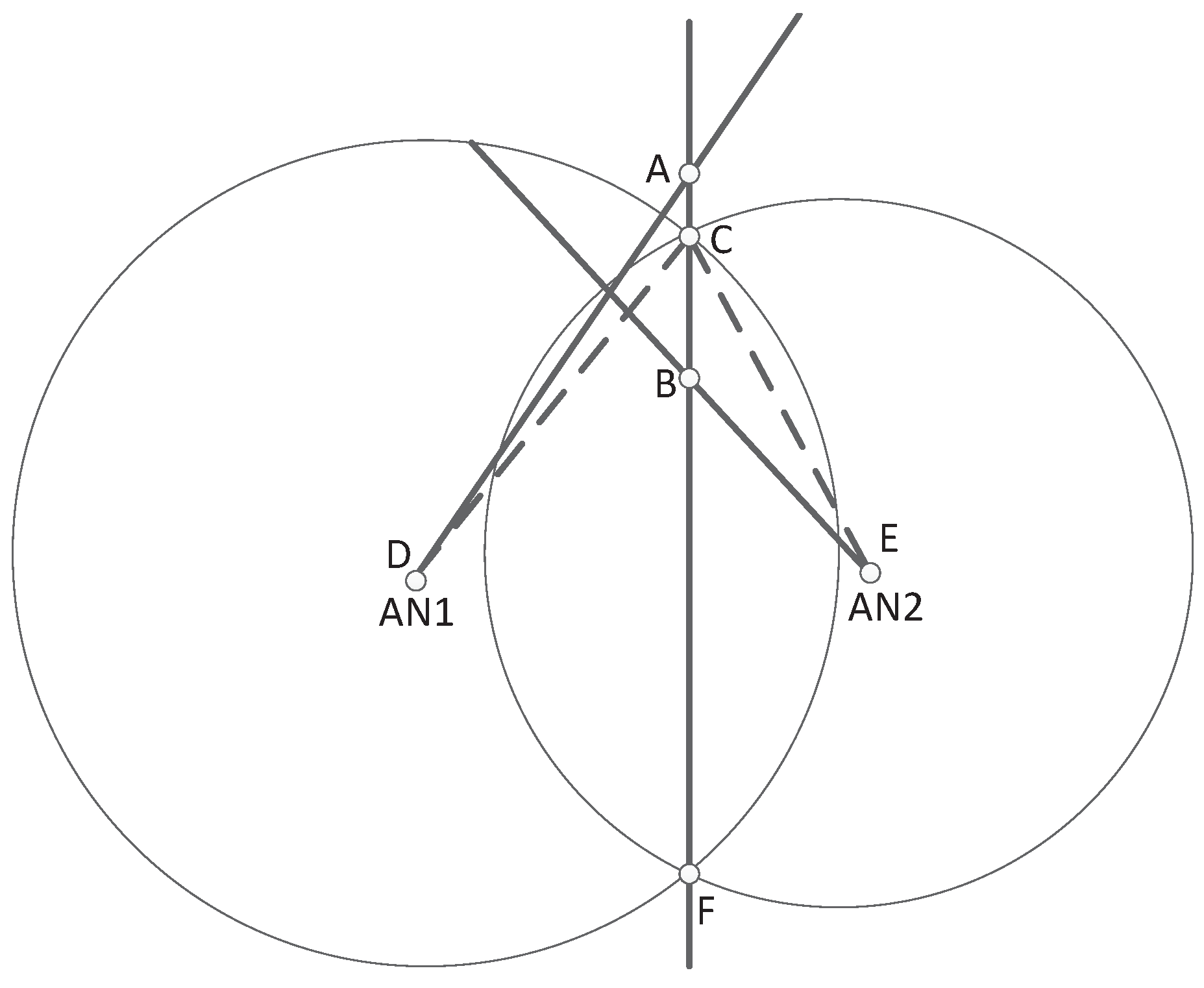
- Find the coordinates of points A and B using (8), and then solve the circle intersections C and F.
- (2)
- Calculate the lengths of AC and AF separately, then find the nearest point of point A from .
- (3)
- Treat {A, B, C’} as three intermediate position estimates.
- (4)
- Use to calculate as well as , and finally compute .
- (5)
- Identify the NLOS-AN by the detector (22).
- (6)
- Estimate the TN position by using LOS-ANs only.
4. Simulation and Analysis
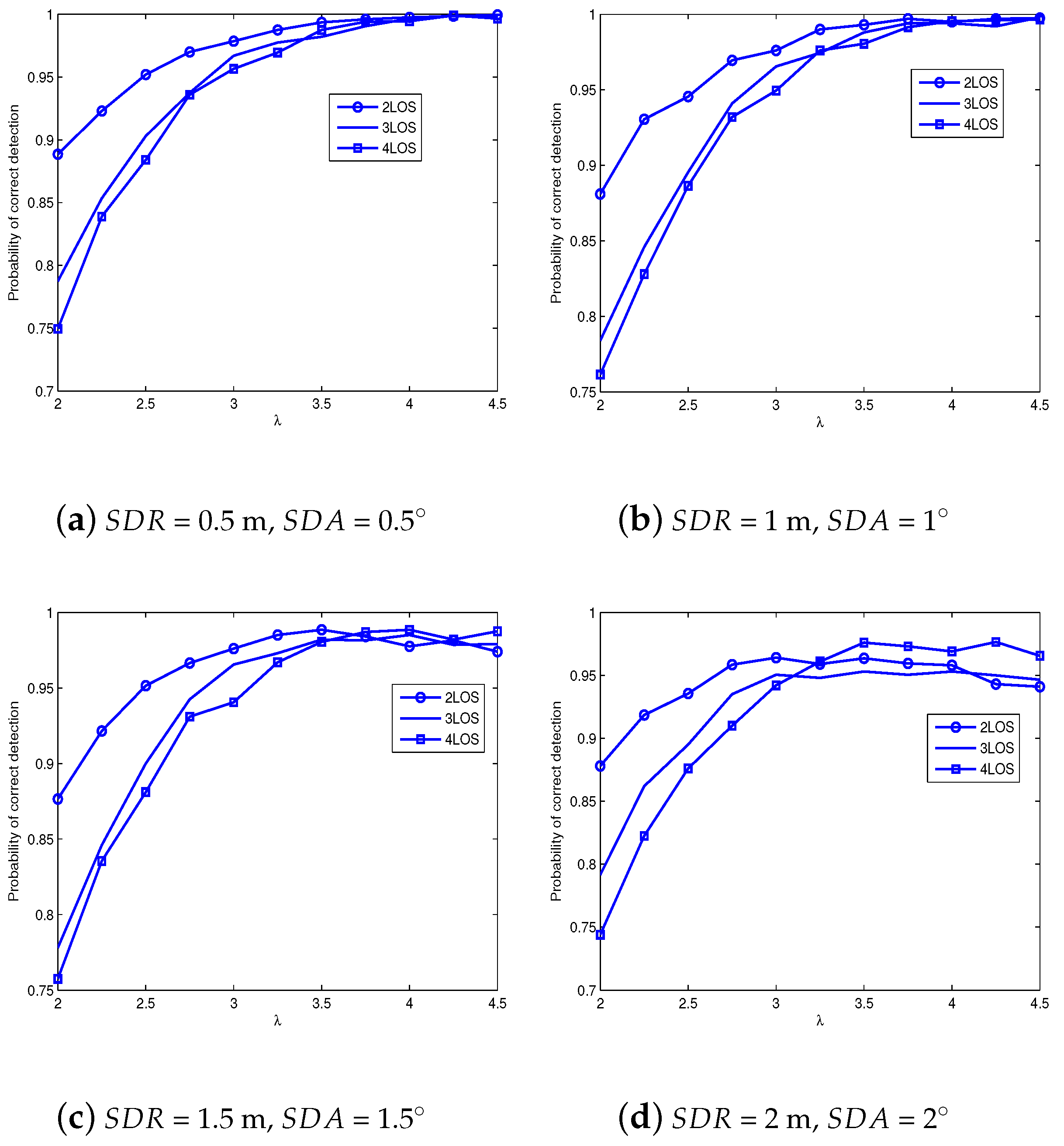
4.1. Threshold Determination
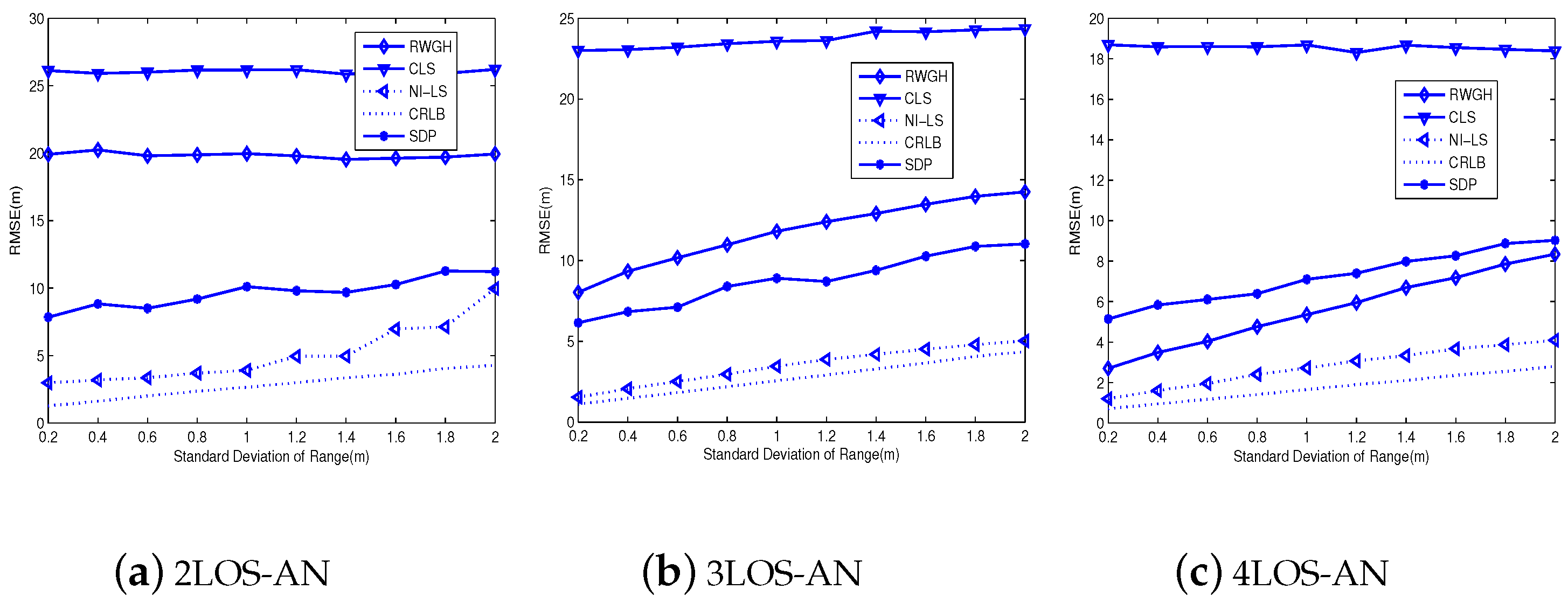
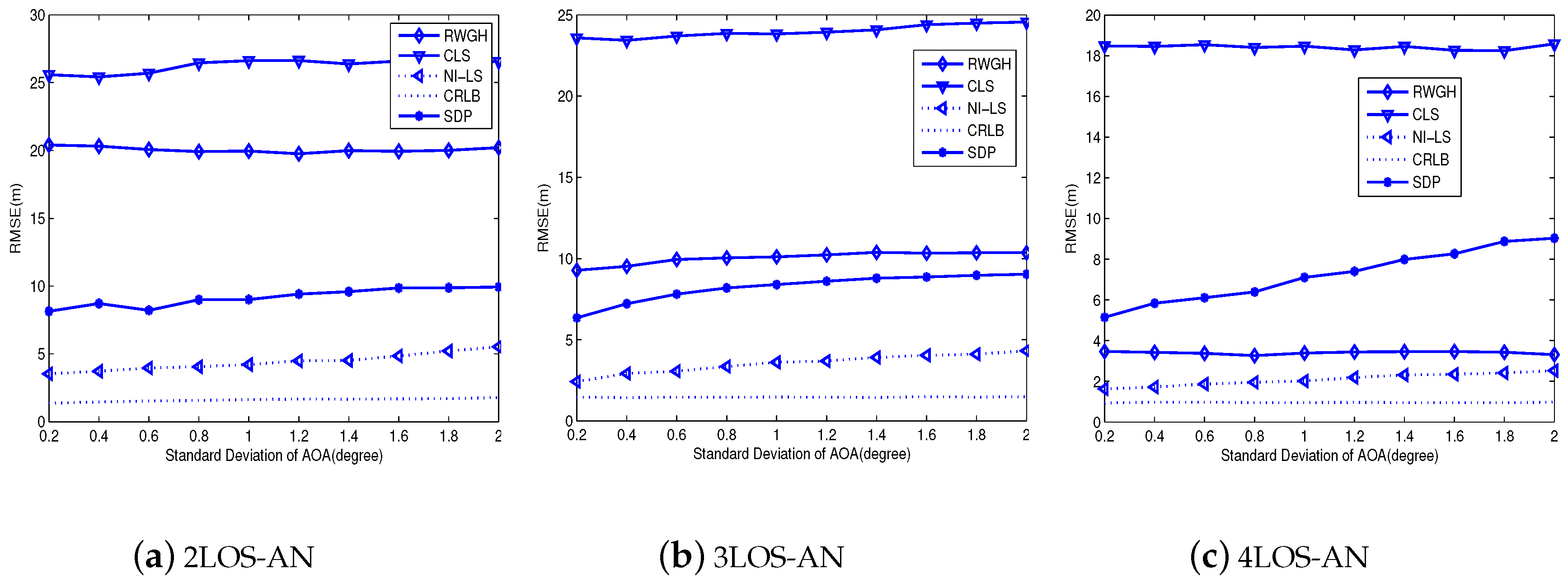
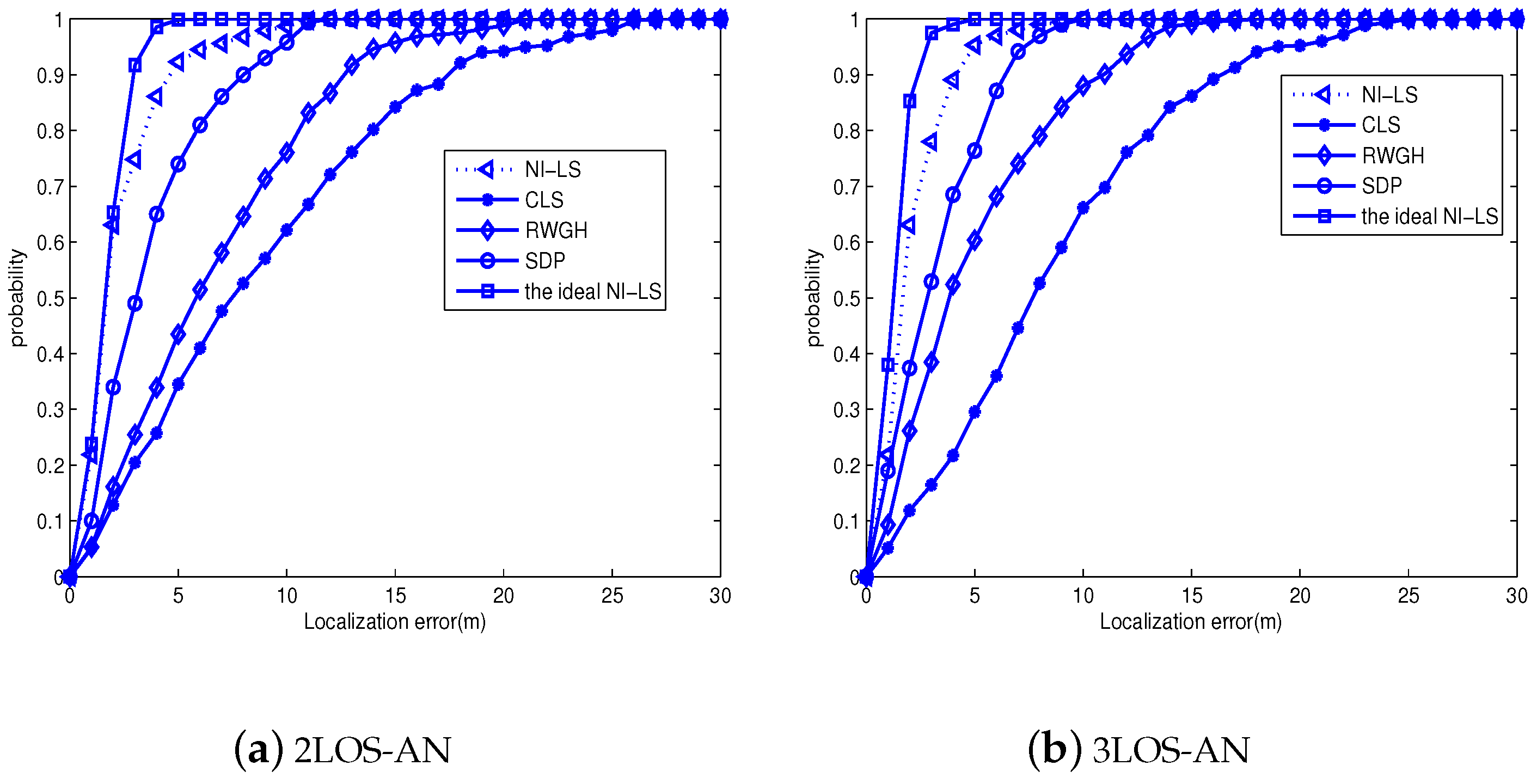
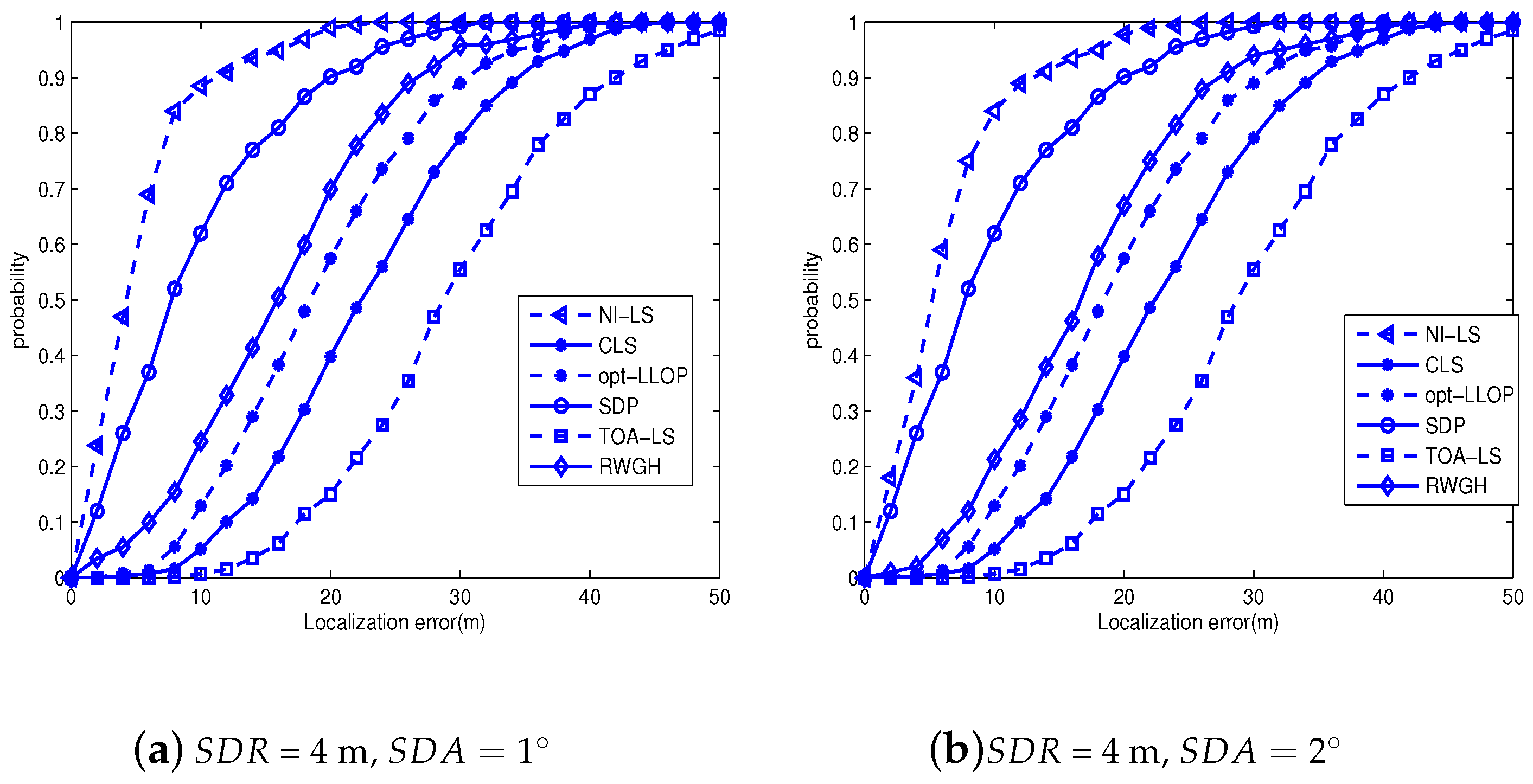
4.2. Analysis for the Positioning Performance
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tomic, S.; Beko, M.; Dinis, R.; Montezuma, P. A Robust Bisection-Based Estimator for TOA-Based Target Localization in NLOS Environments. IEEE Commun. Lett. 2017, 21, 2488–2491. [Google Scholar] [CrossRef]
- Xue, Q.T.; Li, J.P. The minimum error algorithm based on TOA measurement for achieving approximate optimal 3D positioning accuracy. In Proceedings of the 2017 14th International Computer Conference on Wavelet Active Media Technology and Information Processing (ICCWAMTIP), Chengdu, China, 15–17 December 2017; pp. 319–322. [Google Scholar]
- Wang, W.; Wang, G.; Zhang, J.; Li, Y. Robust Weighted Least Squares Method for TOA-Based Localization under Mixed LOS/NLOS Conditions. IEEE Commun. Lett. 2017, 21, 2226–2229. [Google Scholar] [CrossRef]
- Wang, W.; Wang, G.; Zhang, F.; Li, Y. Second-Order Cone Relaxation for TDOA-Based Localization under Mixed LOS/NLOS Conditions. IEEE Signal Process. Lett. 2016, 23, 1872–1876. [Google Scholar] [CrossRef]
- Wang, G.; So, A.M.; Li, Y. Robust Convex Approximation Methods for TDOA-Based Localization under NLOS Conditions. IEEE Trans. Signal Process. 2016, 64, 3281–3296. [Google Scholar] [CrossRef]
- Huang, S.; Wu, Z.; Misra, A. A Practical Robust and Fast Method for Location Localization in Range-Based Systems. Sensors 2017, 17, 2869. [Google Scholar] [CrossRef] [PubMed]
- Fresno, J.; Robles, G.; Martinez-Tarifa, J.; Stewart, B.G. Survey on the Performance of Source Localization Algorithms. Sensors 2017, 17, 2666. [Google Scholar] [CrossRef] [PubMed]
- Pagano, S.; Peirani, S.; Valle, M. Indoor ranging and localisation algorithm based on received signal strength indicator using statistic parameters for wireless sensor networks. IET Wirel. Sensor Syst. 2015, 5, 243–249. [Google Scholar] [CrossRef]
- Kong, F.; Wang, J.; Zheng, N.; Chen, G.; Zheng, J. A robust weighted intersection algorithm for target localization using AOA measurements. In Proceedings of the 2016 IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi’an, China, 3–5 October 2016; pp. 23–28. [Google Scholar]
- Zhang, V.Y.; Wong, A.K.; Woo, K.T.; Ouyang, R.W. Hybrid TOA/AOA-based mobile localization with and without tracking in CDMA cellular networks. In Proceedings of the 2010 IEEE Wireless Communications and Networking Conference (WCNC), Sydney, NSW, Australia, 18–21 April 2010; pp. 1–6. [Google Scholar]
- Yin, J.; Wan, Q.; Ho, K.C. A Simple and Accurate TDOA-AOA Localization Method Using Two Stations. IEEE Signal Process. Lett. 2016, 23, 144–148. [Google Scholar] [CrossRef]
- Gazzah, L.; Najjar, L.; Besbes, H. Selective hybrid RSS/AOA weighting algorithm for NLOS intra cell localization. Trans. Emerg. Telecommun. Technol. Trans. 2016, 27, 626–639. [Google Scholar] [CrossRef]
- Gazzah, L.; Najjar, L.; Besbes, H. Hybrid RSS/AOA Hypothesis Test for NLOS/LOS Base Station Discrimination and Location Error Mitigation. In Proceedings of the 2014 IEEE Wireless Communications and Networking Conference (WCNC), Istanbul, Turkey, 6–9 April 2014; pp. 2546–2551. [Google Scholar]
- Gao, S.; Zhang, F.; Wang, G. NLOS Error Mitigation for TOA-Based Source Localization With Unknown Transmission Time. IEEE Sens. J. 2017, 17, 3605–3606. [Google Scholar] [CrossRef]
- Venkatraman, S.; Caffery, J.; You, H.R. A novel ToA location algorithm using LoS range estimation for NLoS environments. IEEE Trans. Veh. Technol. 2004, 53, 1515–1524. [Google Scholar] [CrossRef]
- Cala, P.; Bienkowski, P.; Zubrzak, B. GSM UMTS base station as a unusual electromagnetic field source Measuremenets in environment for LOS and NLOS scenarios. In Proceedings of the 2015 IEEE Microwave Techniques (COMITE), Pardubice, Czech Republic, 22–23 April 2015; pp. 1–4. [Google Scholar]
- Li, X.; Cai, X.; Hei, Y.; Yuan, R. NLOS identification and mitigation based on channel state information for indoor WiFi localisation. IET Commun. 2017, 11, 531–537. [Google Scholar] [CrossRef]
- Faragher, R.; Harle, R. An Analysis of the Accuracy of Bluetooth Low Energy for Indoor Positioning Applications. In Proceedings of the 27th International Technical Meeting of The Satellite Division of the Institute of Navigation, Tampa, FL, USA, 8–12 September 2014; Volume 84, pp. 201–210. [Google Scholar]
- Park, J.; Cho, Y.K. Development and Evaluation of a Probabilistic Local Search Algorithm for Complex, Dynamic Indoor Construction Sites. J. Comput. Civil Eng. 2017, 31. [Google Scholar] [CrossRef]
- Palumbo, F.; Barsocchi, P.; Chessa, S.; Augusto, J.C. A stigmergic approach to indoor localization using Bluetooth Low Energy beacons. In Proceedings of the 2015 12th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Karlsruhe, Germany, 25–28 Aug 2015; pp. 1–6. [Google Scholar]
- Zhuang, Y.; Yang, J.; Li, Y.; Qi, L.; El-Sheimy, N. Smartphone-based indoor localization with bluetooth low energy beacons. Sensors 2016, 16, 596. [Google Scholar] [CrossRef] [PubMed]
- Khalajmehrabadi, A.; Gatsis, N.; Akopian, D. Indoor WLAN localization using group sparsity optimization technique. In Proceedings of the 2016 IEEE Position, Location and Navigation Symposium (PLANS), Savannah, GA, USA, 11–14 April 2016; pp. 584–588. [Google Scholar]
- Tomic, S.; Beko, M. A Bisection-based Approach for Exact Target Localization in NLOS Environments. Signal Process. 2017, 143. [Google Scholar] [CrossRef]
- Cheng, K.W.; So, H.C.; Ma, W.K.; Chan, Y.T. A constrained least squares approach to mobile positioning: Algorithms and optimality. Eurasip J. Adv. Signal Process. 2006, 2006, 020858. [Google Scholar] [CrossRef]
- Jiao, L.; Li, F.Y.; Xu, Z.Y. LCRT: A ToA Based Mobile Terminal Localization Algorithm in NLOS Environment. In Proceedings of the VTC Spring 2009—IEEE 69th Vehicular Technology Conference, Barcelona, Spain, 26–29 April 2009; pp. 1–5. [Google Scholar]
- Hua, Z.; Hang, L.; Yue, L.; Hang, L.; Kan, Z. Geometrical constrained least squares estimation in wireless location systems. In Proceedings of the 2014 4th IEEE Network Infrastructure and Digital Content (IC-NIDC), Beijing, China, 19–21 September 2014; pp. 159–163. [Google Scholar]
- Zheng, X.; Hua, J.; Zheng, Z.; Zhou, S.; Jiang, B. LLOP localization algorithm with optimal scaling in NLOS wireless propagations. In Proceedings of the 2013 IEEE 4th International Conference on Electronics Information and Emergency Communication (ICEIEC), Beijing, China, 15–17 November 2013; pp. 45–48. [Google Scholar]
- Bergstrom, A.; Hendeby, G.; Gunnarsson, F.; Gustafsson, F. TOA Estimation Improvements in Multipath Environments by Measurement Error Model. In Proceedings of the 2017 IEEE International Symposium on Personal Indoor and Mobile Radio Communications, Montreal, QC, Canada, 8–13 October 2017; pp. 1–7. [Google Scholar]
- Liu, H.C.; Hsuan, C.W. AOA estimation for coexisting UWB signals with multipath channels. In Proceedings of the International Conference on Telecommunications and Multimedia 2014, Heraklion, Greece, 28–30 July 2014; pp. 173–178. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Description |
|---|---|
| RWGH | Residual weighting algorithm [25] |
| CLS | Constrained Least Squares Algorithm [26] |
| NI-LS | Using the least squares algorithm after NLOS-AN identification |
| Ideal-NI-LS | Using the least squares algorithm with known LOS-AN |
| CRLB | Cramer-Rao lower bound (CRLB) with known LOS-AN [24] |
| SDP | Convex semidefinite programming algorithm [4] |
| opt-LLOP | Linear optimization algorithm [27] |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hua, J.; Yin, Y.; Lu, W.; Zhang, Y.; Li, F. NLOS Identification and Positioning Algorithm Based on Localization Residual in Wireless Sensor Networks. Sensors 2018, 18, 2991. https://doi.org/10.3390/s18092991
Hua J, Yin Y, Lu W, Zhang Y, Li F. NLOS Identification and Positioning Algorithm Based on Localization Residual in Wireless Sensor Networks. Sensors. 2018; 18(9):2991. https://doi.org/10.3390/s18092991
Chicago/Turabian StyleHua, Jingyu, Yejia Yin, Weidang Lu, Yu Zhang, and Feng Li. 2018. "NLOS Identification and Positioning Algorithm Based on Localization Residual in Wireless Sensor Networks" Sensors 18, no. 9: 2991. https://doi.org/10.3390/s18092991
APA StyleHua, J., Yin, Y., Lu, W., Zhang, Y., & Li, F. (2018). NLOS Identification and Positioning Algorithm Based on Localization Residual in Wireless Sensor Networks. Sensors, 18(9), 2991. https://doi.org/10.3390/s18092991