1. Introduction
In recent years, underwater mobile sensor networks have been rapidly developed and widely used in marine science and engineering fields. Compared with traditional static sensor networks, the underwater mobile sensor networks [
1] can realize dynamic, large-scale sensing and operation at a lower cost. Due to the autonomous properties [
2], multi-UUV, regarded as intelligent and reconfigurable underwater mobile sensor networks [
3,
4], have found an increasingly wide utilization for combined investigation, cooperative survey, and coordinated exploration [
5]. Usually, multi-UUV sensor networks adopt a formation mode when sailing and working, which are propitious to information interaction and cooperative operation between UUVs. Thus, good formation control [
6] is necessary and important for improving operation efficiency and reducing energy consumption of multi-UUVs.
There are four main methods for formation control [
7], such as behavioral, virtual structure, queues and artificial potential trenches, and leader–follower approaches. For this paper, the leader–follower approach is adopted to realize formation control of multi-UUVs. In recent years, a great deal of attention has been focused on leader–follower formation control to keep multi-UUVs in a desired formation configuration and, at the same time, to complete the assigned tasks. Edwards [
8] proposed a method that the leader navigates the mission waypoints and each follower maintains its place in formation using the position of the leader via an exogenous system with knowledge of the internal positions of all UUVs. In [
9], the follower controller is designed by back-stepping and an approximate-based control method to track a reference trajectory based on the leader position and predetermined formation without the need for the leader’s velocity and dynamics. Bikramaditya [
10] addresses the leader–follower formation control of multiple non-holonomic UUVs for the area coverage problem, based on a planned path by an optimization algorithm for the formation leader motion, and a designed communication strategy so that the UUVs can exchange information to obtain the designated waypoints that are sent from the leader. Therefore, one significant advantage of the leader–follower approach is that the reference trajectory is clearly defined by the leader and the internal formation stability is induced by the control laws of individual vehicles.
In general, the objective of coordinated formation control is to seek collaborative policies such that each UUV uses only limited local information to reach an overall goal in the ocean investigation, survey and exploration mission. This means that controllers of the leader-follower UUV formation should be designed to achieve consensus in complicated environments [
11]. In recent years, considerable research efforts have been made on consensus [
12,
13,
14]. A sufficient condition was derived to achieve multi-agent systems’ consensus in the case where the network is jointly connected frequently enough as the network evolves with time [
15]. Second-order consensus in a multi-agent dynamical system with sampled data was studied by proposing a necessary and sufficient condition in [
16,
17]. Finite-time position consensus and collision avoidance problems are investigated for multi-UUV systems, which guarantee collision avoidance, connectivity maintenance, velocity matching, and consensus boundedness [
18]. In fact, the particular underwater environment poses great disturbances on the formation control of multiple UUV system [
19,
20]. The controllers for multi-UUV should be designed for safety and robustness, especially in the presence of large model uncertainty and ocean current disturbances [
21,
22].
As is well known, in the difficult underwater communication environment, most communication systems on land cannot be applied in the design of UUVs, and the exchange of information between UUVs can only pass through limited underwater acoustic links which is characterized by low stability. In fact, how to design the formation control scheme while taking into account the practical means of communication for a multi-UUV system is a great challenge and has not been fully studied. In recent years, there are many studies regarding the narrow band and time delay of the acoustic communication of multiple UUVs [
23,
24], but fewer studies regarding the communication failures which have a serious impact on the stability of communications. Due to the link failure, which is a temporary disruption in an acoustic link caused by the complex underwater environment, the communication topology of multi-UUVs may fail to remain constant, but dynamically change over time. Moreover, the underwater acoustic links are seriously influenced by marine background noises. Thus, how to obtain valid communication information is very important for the UUV formation control.
Motivated by the above discussion, a formation control algorithm which can make the multiple UUV system achieve consensus is developed. The main contributions of this paper can be summarized as follows: First of all, a leader-follower UUV formation control approach is designed based on state feedback and consensus algorithm. To design the controller, the coupled mathematical model of the UUV is simplified and rewritten into a linearization model by state feedback linearization. Considering model uncertainties and current disturbances, a second-order integral UUV model with nonlinear function and current disturbances is established. Secondly, for unstable communication among UUVs, communication failure and acoustic link noise interference are considered. Two-layer random switching topologies, which are used to deliver position and velocity information, respectively, are adopted to improve the efficiency of communication and solve the problem of communication failure. For the acoustic link noise interference, the concept of communication topology effective weight is used to represent the validity of communication information interfered by noise in the acoustic link, and obtain the effective weights of position and velocity topologies, respectively. Finally, by stripping noise disturbances, sufficient conditions to design distributed controllers are proposed to ensure the UUV formation can achieve consensus under model uncertainties, current disturbances, and unstable communication. The stability of the leader-follower formation control is proven by using the Lyapunov-Razumikhin theorem.
The rest of this paper is organized as follows:
Section 2 is the problem statement. In
Section 3, the second-order integral UUV model with nonlinear function and current disturbances is built by state feedback. In
Section 4, the leader-follower UUV formation controllers are designed by the state feedback and consensus algorithm under unstable communication.
Section 5 presents the simulation results.
Section 6 is the discussion of those results. Finally,
Section 7 offers the conclusion.
2. Problem Statement
2.1. Multi-UUV Sensor Networks
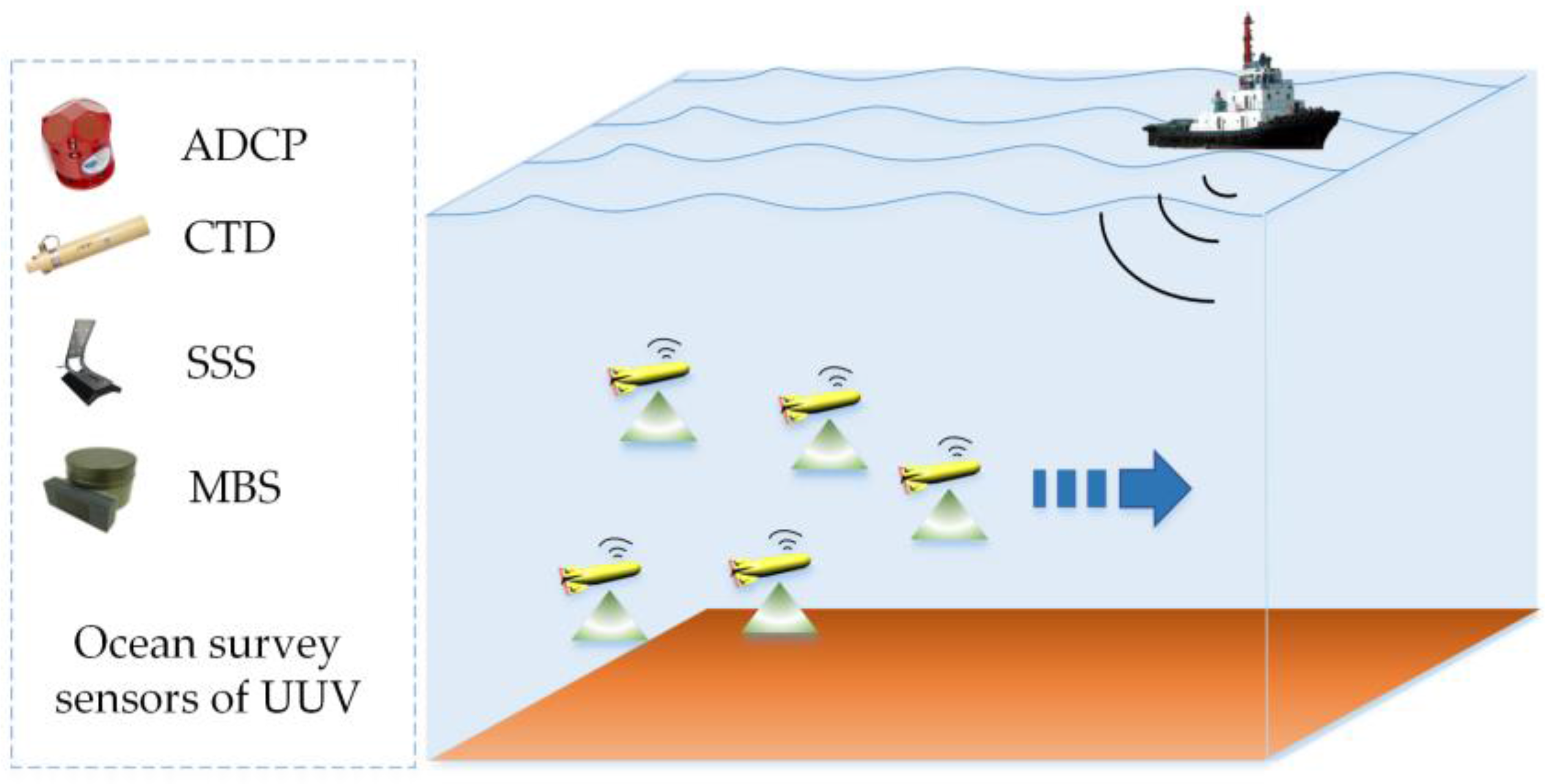
The novel key feature of underwater sensor networks are multi-UUV sensor networks. Let UUV act as an intelligent sensing and operating node, and then the reconfigurable underwater mobile sensor networks are built for ocean investigation, survey, and exploration missions (
Figure 1). In this paper, each UUV is equipped with one or more ocean survey sensors. The ocean survey sensors include: (1) an upward-looking ADCP (Acoustic Doppler Current Profiler) with a maximum range of 100 m; (2) a CTD (Conductivity Temperature Depth) sensor can continuously measure water conductivity, temperature, and depth; (3) side-scan sonar (SSS) creates an image of the sea floor topography for searching and detecting objects. The sonar is a dual frequency type that projects acoustic waves at 120 and 410 KHz at the central frequency; and (4) multi-beam echo sounder (MBS) observes bathymetry for mapping the seafloor terrain. Usually, multi-UUV sensor networks adopt a formation mode when sailing and working. Aiming to improve the work efficiency and reduce the energy consumption of multi-UUV sensor networks, the mission planning, navigation and location, and control of multi-UUVs are necessary. This paper mainly researches the leader-follower formation control method so that these UUVs can form an intelligent network achieving high performance with significant features of scalability, robustness, and reliability. The leader tracks a reference trajectory, and UUVs keep in a formation which is designed for specific tasks and mission areas.
The application area of the method and algorithm developed in this paper is mainly for ocean investigation, survey, and exploration missions using a middle-number-scale multi-UUV sensor network. Here, the middle-number-scale means that the multi-UUV system has no more than 10 UUVs, and, in order to realize formation sailing and operation, the multi-UUV system must have acoustic networking communication capabilities with a frequency range of 8–16 kHz. In addition, for obtaining better communication interaction and collaborative control, the formation spacing between every two UUVs is limited to 30–100 m.
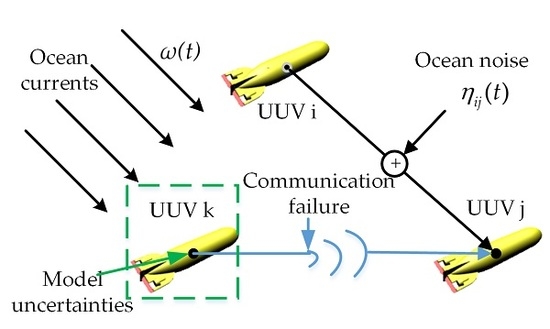
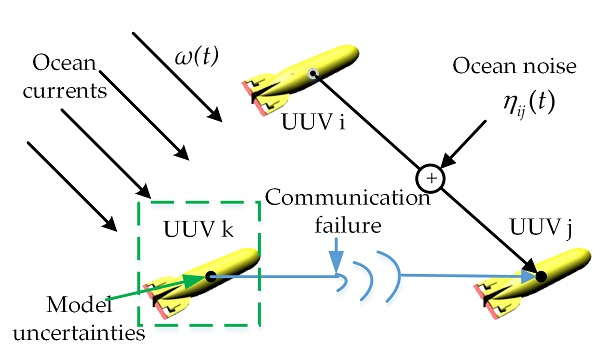
2.2. Model Uncertainties, Current Disturbances, and Unstable Communication
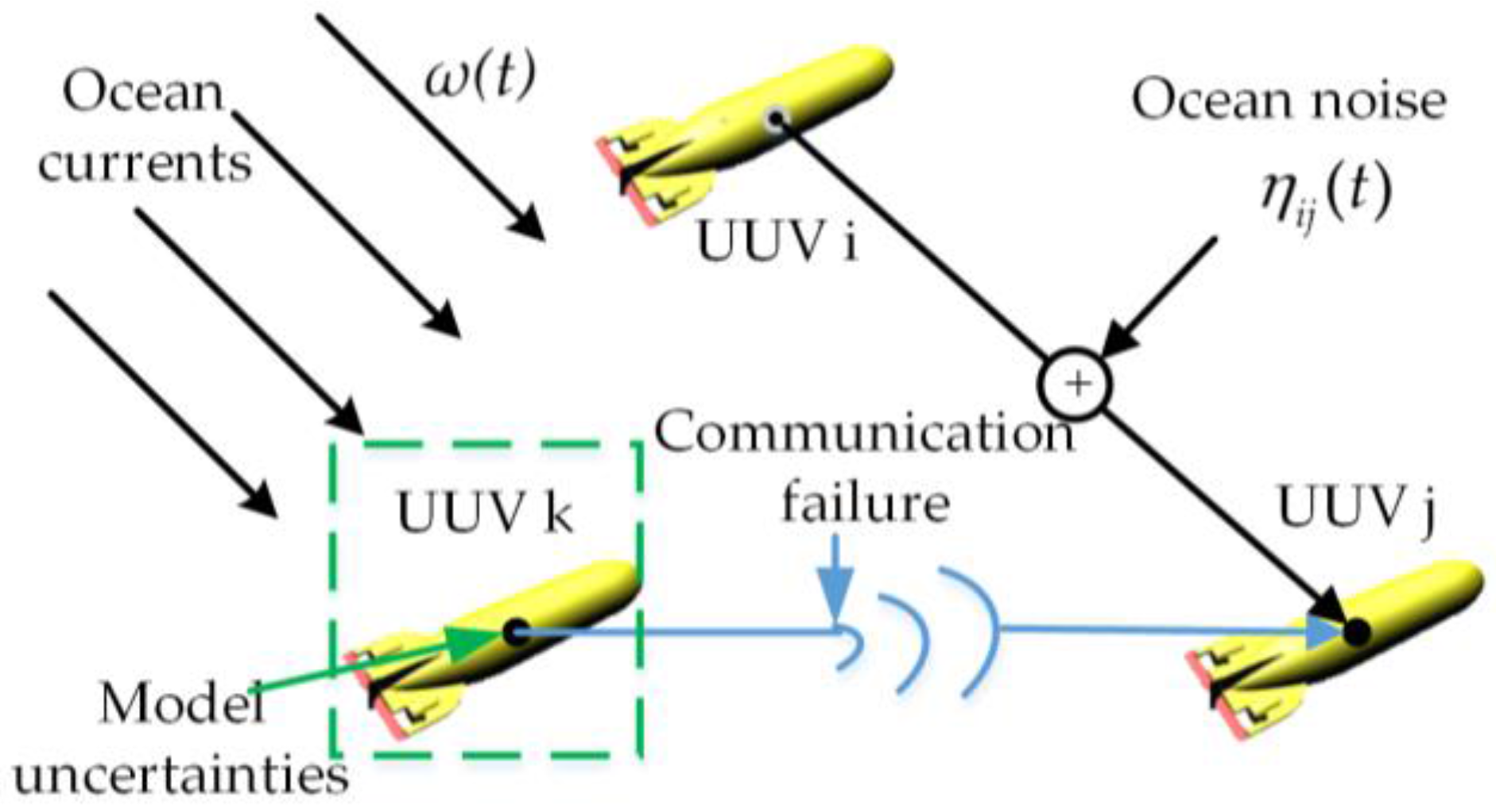
The particular underwater environment poses great influences on the stability of leader-follower UUV formation control, which is shown in
Figure 2. The distributed formation controllers are designed based on state feedback and consensus algorithm in this paper. To design the controller, the coupled mathematical model of the UUV should be simplified into a second-order integral model by state feedback linearization. However, each vehicle is subject to model uncertainties and current disturbances, as the underwater movement of UUV is a complex space motion. The model uncertainties include time-varying parameters and additional nonlinear parts. Thus, the model of the UUV is divided into an approximate linear part and a nonlinear uncertain part in
Section 3. A second-order integral UUV model with nonlinear function and current disturbances is established.
The state information between UUVs is transmitted through underwater acoustic links. There are many factors affecting the acoustic communication, and this paper mainly researches communication failures and acoustic link noise interference. The communication failure, data not available from the collaborative UUVs during certain periods of time, seriously limits information exchanges. Two-layer random switching topologies are adopted to solve the problem of communication failure. The topologies can dynamically change to maintain formation communication. In addition, the acoustic communication information may be disturbed by noises in the process from sender to receiver. How to accurately represent valid communication information and strip noise out of state information is researched.
2.3. Graph Theory
The communication relationship of all UUVs is , where is n UUVs nodes set, is edge set representing all communication links in formation, is the adjacency matrix. The neighbor set of node is denoted as . The Laplacian matrix associated with is defined as . is defined as the in-degree matrix.
The communication topologies of the whole UUV formation include two parts. One communication topology is among n followers, the other is between the leader and all followers. Considering the limitation of acoustic link bandwidth, communication links among all UUV members are divided into position information links and velocity information links. Thus, the communication topologies are divided into position topology and velocity topology .
Let and be the position and velocity topologies among n followers. In , make , , where denotes the leader node, is the communication link between the leader and the followers. is the same definition. The Laplacian matrix of is , and the Laplacian matrix of is . is the position adjacency matrix between the leader and the followers, and is the velocity adjacency matrix.
2.4. Consensus of the Leader-Follower UUV Formation
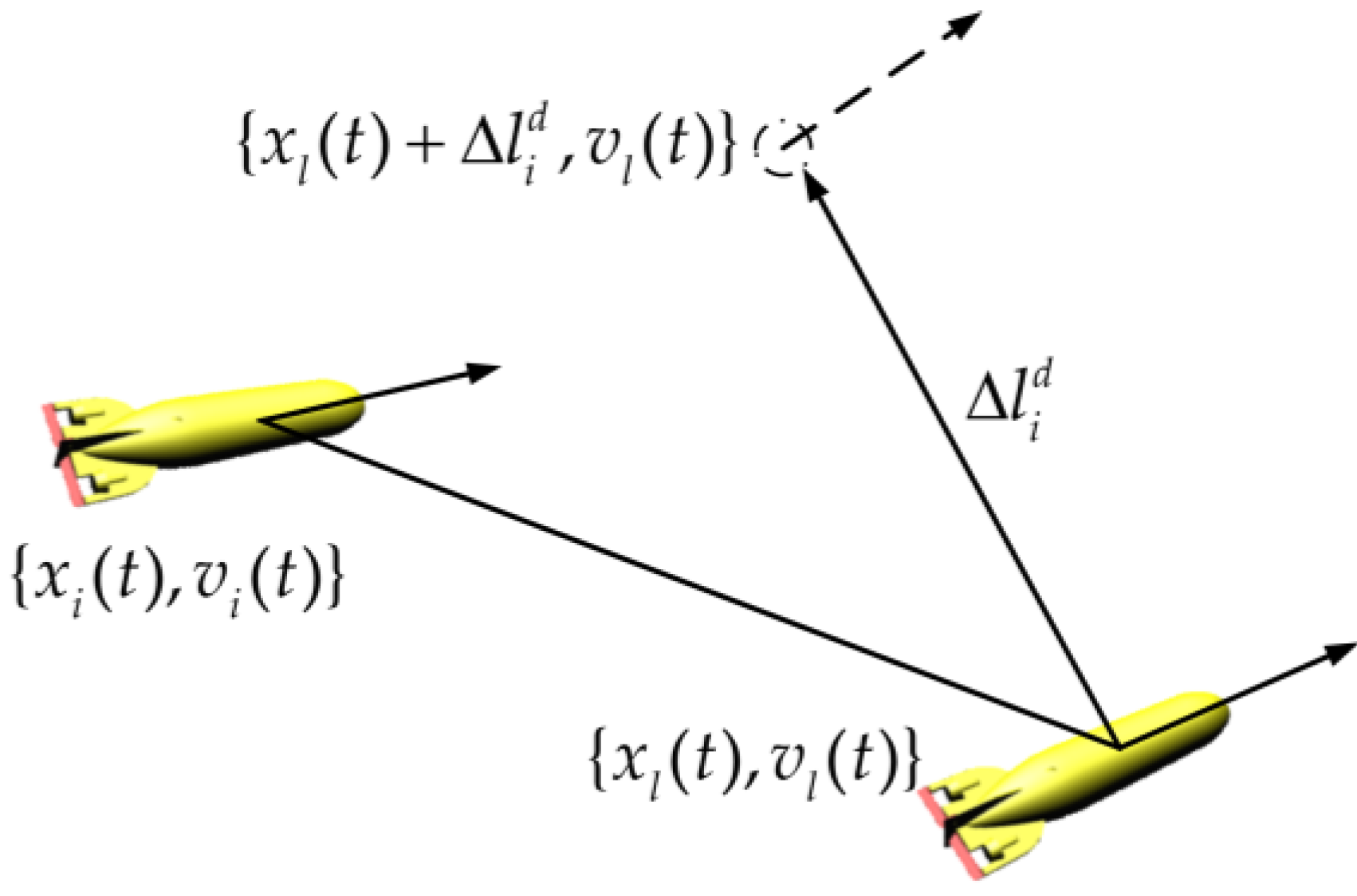
In this paper, the leader is fully-functional, guides the whole formation, and can transmit its position and orientation
, and velocity
, to all followers. Each follower maintains a desired geometric configuration with the leader. For UUV leader-follower formation, the leader is defined as the fixed reference point
. Thus, the expected state of each follower UUV is that
,
is the fixed relative distance to the leader (
Figure 3).
The advantage of leader-follower formation is that specifying a single quantity (the leader’s motion) directs the group behavior. Therefore, it is simple since a reference trajectory is clearly defined by the leader and the internal formation stability is induced by the control laws of the followers. In this way, the conclusion is that each follower UUV can also converge to the desired point, if each follower UUV can converge to the leader in the formation. Thus, Definition 1 can be obtained as follows.
Definition 1. In the leader-follower UUV formation, there is one leader and n followers and, at time t, the motion state vector of the ith follower UUV is , and the motion state vector of the leader is . If the following formula holds, the leader-follower UUV formation can achieve consistency and continuously ensure the system stability and convergence: 4. Formation Control with Unstable Communication
4.1. Two-Layer Random Switching Topologies for Communication Failure
Two-layer random switching communication topologies including position topology and velocity topology are proposed to solve the problem of communication failure in this part. Driven by the Markov random process, the position topology switches randomly among a position topology set, and the velocity topology switches randomly among a velocity topology set. Assuming that a topology set is
, define a basic probability space of the Markov random process
is
.
is the algebra of events, and P is the probability measure defined on
F. When
, it indicates that the current communication topology is
,
is the quantity of the topological set. According to [
30], the switching probability matrix is
, then:
where
represents the switching probability from topology
to topology
, and
. When
,
.
denotes an infinitesimal of a higher order than
, which means
.
Now, the position topology set and the velocity topology set are formed, respectively. Let
be the
ith position topological unit in the position topology set,
. Joint topology of the position topology set is:
where
,
, and
.
In the same way, the joint topology of velocity topology set is obtained as . The joint Laplacian matrix is: , .
4.2. The Effective Weight of Communication Topologies for Ocean Noises
The underwater acoustic links are seriously subject to ocean noises. The state information of the UUV may be disturbed by noises in the process from sender to receiver. Gaussian white noise is used to model ocean noises in this paper. Thus, the communication topology weights are stochastically perturbed by Gaussian white noise . and are respectively defined as the real position topology and velocity topology weights, which are interfered by among all follower UUVs. , , indicates that node can receive information from node , otherwise , . is defined as the real position communication topology weights between the leader and followers, and the real velocity communication topology weights . , , indicate that the ith follower can receive the position and velocity information of the leader, otherwise , .
In order to solve the influence of ocean noise on communication, the concept of communication topology effective weight is introduced. Here,
and
are defined as position and velocity communication topology effective weights among all follower UUVs.
and
are defined as the position and velocity communication topology effective weights between the leader and followers. With the increasing of influence of ocean noises on communication, the communication topology effective weights decrease. Then, the relationships between real weights
,
and effective weights
,
can be expressed as:
where
is the noise density in the link from sender
to receiver
at time
, and it is also a continuous function that varies with time.
is Gaussian white noise in the communication link from sender
to receiver
at time
, and
is an independent standard Gaussian white noise.
In a similar way, the relationships between real weights
,
and effective weights
,
are:
Now, the validity of communication information can be expressed by effective communication topology weights instead of real communication topology weights.
4.3. Leader-Follower UUV Formation Control
According to Definition 1 and UUV model with nonlinear function and current disturbances, the control inputs at time
of leader-follower UUV formation with unstable communication are:
where
and
respectively represent the control gains for the position and velocity communication topologies,
is the set of the
ith UUV’s neighbors in the position topology,
is the set of the
ith UUV’s neighbors in the velocity topology, and
represents a time-varying time delay
.
Stripping noise interference, the noise interference is expressed as corresponding vectors, then the
ith UUV’s interferences are:
The
ith follower’s model with white noise interference, nonlinear function, and current disturbances is:
Defining the
ith follower’s state vector is
, the leader’s state vector is
. Then, the state vectors of all followers are
. The system state equation is:
where
donates the nonlinear function of the system, and
.
is the current disturbances vector, and
;
,
, and
,
,
.
According to Definition 1, the system’s state error vector is defined as , and the ith follower’s state error vector is .
In order to analyze ocean noise interference on system stability, Gaussian white noise is taken as a state variable of the system, which is written as follows:
and:
where
,
,
,
,
.
In addition,
denotes the Markov random process,
.
,
. Assume that:
, and
. Obviously, the following matrices are available:
where
,
,
, .
The system error state equation is obtained:
where,
,
,
represents the vector of the current error between the followers and leader, and
,
.
Further simplified, Equation (48) can be written as:
where
,
,
,
.
According to the state error, as shown in Equation (49), the sufficient conditions of stable convergence of the system are obtained as shown in Theorem 1.
Theorem 1. In a leader-follower UUV formation consisting of UUVs, the communication topologies satisfy the two-layer Markov random process. If the acoustic link is disturbed by ocean noise, at least one follower can receive the leader’s state information. If the following matrix inequality holds and positive definite matrices , and exist, the leader-follower UUV formation control is stable and convergent:where , , , , , and . 4.4. Stability Analysis
Using the Lyapunov-Krasovskii theory to verify the stability of the leader-follower UUV formation control in the presence of model uncertainties, current disturbances, and unstable communication, build the Lyapunov function:
where
,
and
are positive definite matrices with the corresponding dimension, respectively. Let:
Then, let
, and build the
kth topology’s Lyapunov function:
Build the expectation equation
of the Lyapunov function:
The derivation of the Lyapunov function expectation equation is obtained:
Lemma 1. Assume that that is observable, and exists, so for any , the following equation holds [
31]:
The time delay of communication for UUV formation at any time , satisfies , and its derivation satisfies , , .
Derive the expectation functions of two Lyapunov functions separately:
where, in order to simplify the expression of above equations,
,
, and
represent
,
and
, respectively.
The Lyapunov expectation function of topology set is that
. Obviously, the Lyapunov expectation function for the switching topology set can be expressed as follows:
It should be noted that, in Equation (60), all state variables are based on the joint topology set. Therefore, the Laplacian matrices of the joint topology set are , , and .
Substituting the simplified system error state Equation (49) into Equation (60), one obtains:
where
.
In the Lyapunov function, there are , so Lemma 2 is deduced to further support the stability analysis of the Lyapunov function in the following.
Lemma 2. Assuming , , one obtains: Proof. Since the matrices in Equations (45)–(47) are diagonal matrices, it can be obtained:
where the time delay is included in
and
, and the subscript is used to simplify the expression of the time delay, for example
, so:
Since
and
are diagonal matrices, Equation (64) is rewritten to:
Since
, and the special structure of
, the following equation is established:
where
,
,
,
.
According to the definition of communication links between leader and followers, one obtains:
Since there must be
, the following inequality is established:
Then, for the joint topological set:
The proof of Lemma 2 is completed. □
In the same way, the following inequality is obtained:
Equation (61) can be rewritten as:
Considering the additional nonlinear factors, it is:
For the disturbances of ocean current:
Substituting the Equations (73) and (74) into Equation (72), one obtains:
Combining the Equations (58), (59) and (75), the following is obtained:
If Equation (50) holds, there must be a positive real number , so that . Therefore, the leader-follower UUV formation control is asymptotically stable.
5. Simulations
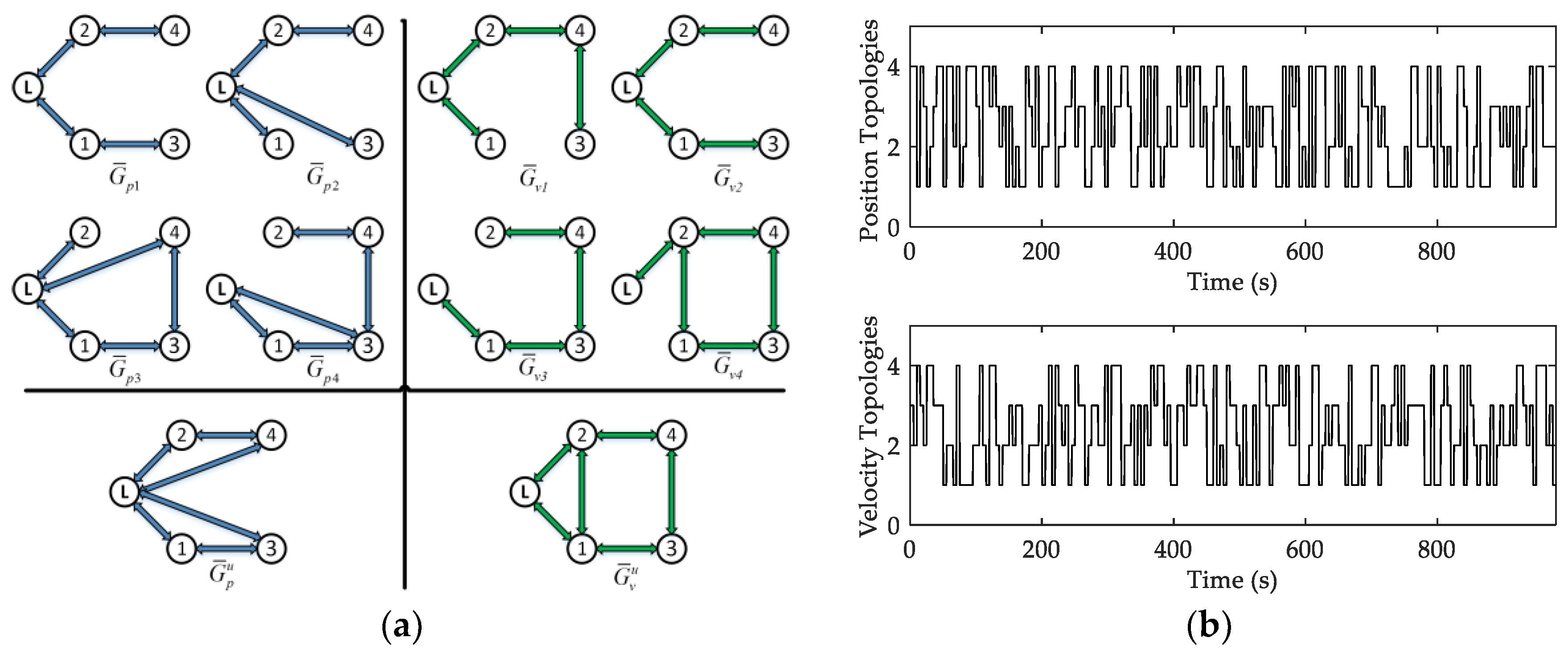
To illustrate the theoretical results obtained in the previous sections, some simulations are given. Suppose that the leader-follower UUV formation is consisted of one leader and four followers. The time delay is
. The two-layer random switching topology set contain four
position communication topologies
and four velocity communication topologies
,
. The joint topologies are
and
which are shown in
Figure 4a.
Figure 4b shows the state changes of the two-layer Markov switching topology in this simulation example.
The formation structure is designed as an equilateral triangle in this simulation, and each follower maintains a desired geometric configuration with the leader. The follower UUVs include UUV 1, UUV 2, UUV 3, and UUV 4. The desired relative distance of UUV 1 to the leader is 10 m, the desired relative distance of UUV 2 is 10 m, the desired relative distance of UUV 3 is 20 m, and the desired relative distance of UUV 4 is 20 m. Relative angle is the angle between the motion direction of leader and relative distance. The desired relative angle of UUV 1 is 150 deg, desired relative angle of UUV 2 is 210 deg, desired relative angle of UUV 3 is 150 deg, and desired relative angle of UUV 4 is 210 deg.
The initial position of each follower is randomly placed in the three-dimensional space. The initial pitch angle and heading angle are respectively set in the range
and
. The initial states of leader UUV and all follower UUVs are shown in
Table 1.
The control gains of the leader-follower UUV formation controller are
and
, where
,
. The leader is operated on the desired path which is designed as a spiral curve:
Current velocity is set as
. The SNR of the acoustic communication is selected as 10 dB, and all effective communication topology weights are considered under the condition of SNR 10 dB. The additional nonlinear function is defined as the saturation function related to the UUV’s velocity state as shown in Equation (78) and satisfies the Poisson distribution:
:
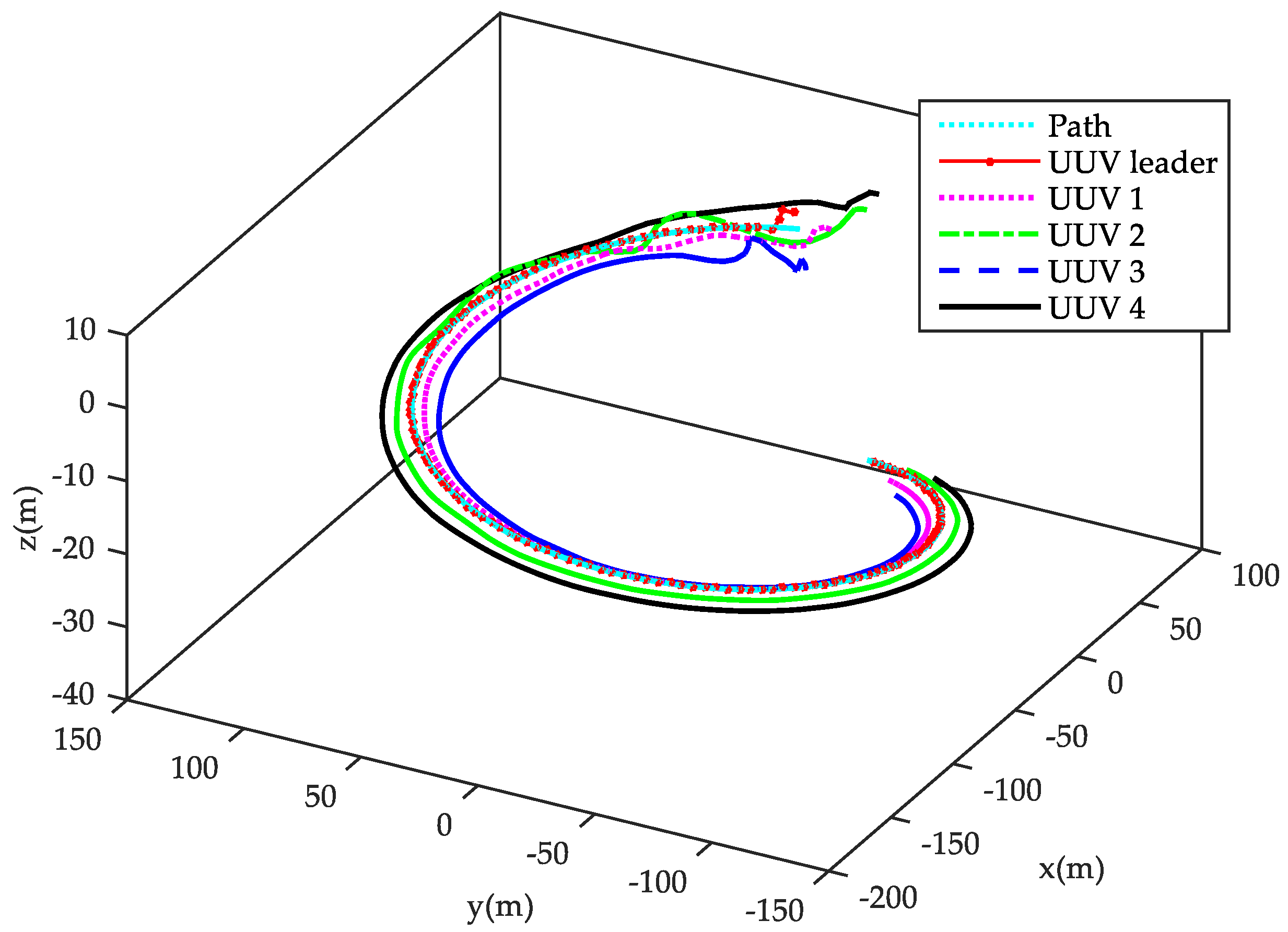
Figure 5 shows the three-dimensional trajectory of each member in the leader-follower UUV formation. As shown in the figure, the leader UUV is responsible for tracking the desired spiral curve path, and each follower UUV tracks the leader UUV according to its desired relative distance and angle, regardless of tracking the spiral curve path. The ultimate control result is that the whole multi-UUV system tracks the desired spiral path with the desired triangle formation structure.
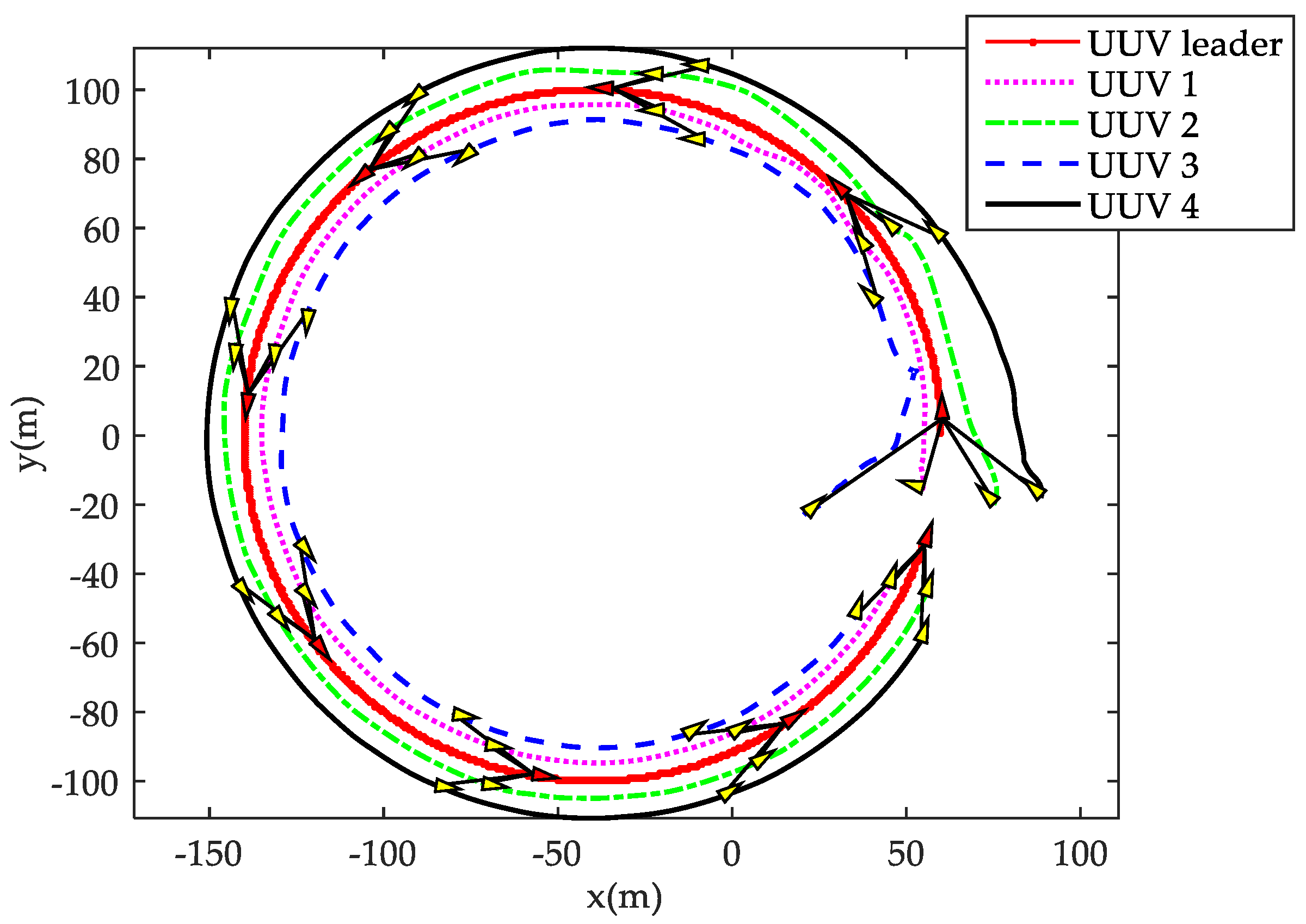
Figure 5 shows that, after an adjustment period, the randomly-placed follower UUVs can stably converge to a desired formation structure, and the leader-follower formation can, primarily, keep tracking the desired path. The two-dimensional trajectory of the leader and follower UUVs are shown in
Figure 6. The red and yellow filled triangles on each trajectory denote the heading of the leader UUV and follower UUVs, respectively. It can be shown in
Figure 6 that the initial positions and headings of each follow UUV are disorderly, which is not conducive to constructing a formation and track spatial path. However, under the formation control law, each follower can reach and keep the desired relative distance and relative angle with the leader after an adjustment period, and the leader and all followers can maintain the desired triangle formation structure.
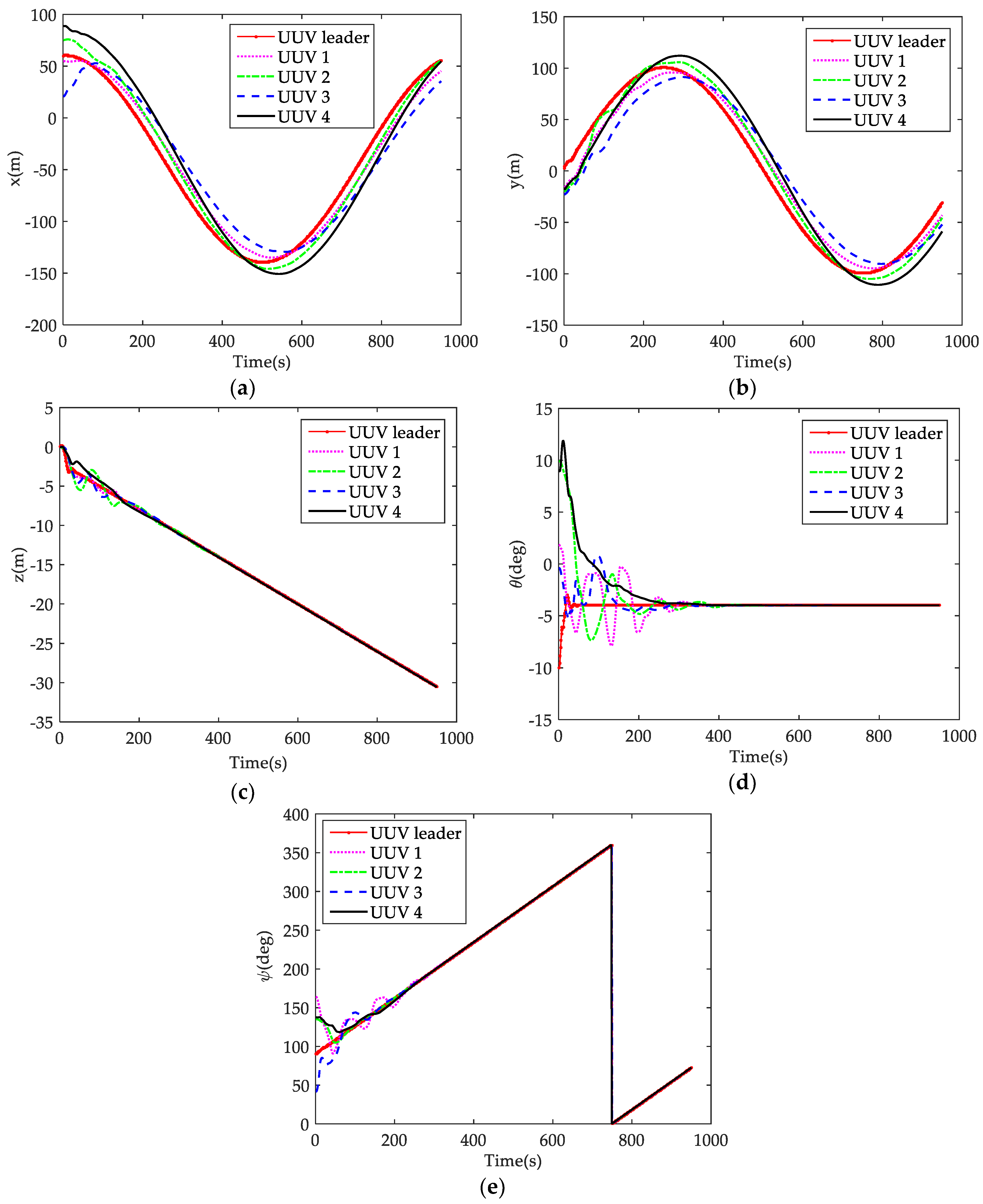
Figure 7 shows the position and attitude states of leader-follower UUV formation. It can be seen detailed from the
,
, and
position figure, and the desired triangle formation absolutely follows the desired path after about 170 s because of the initial random positions of the follower UUVs. For
Figure 7a, by analyzing the response trend of the position
value for all UUVs, it can be found that the leader UUV gradually shifts to be the smallest and then gradually shifts to be the largest. Referring to
Figure 6, the response trend of the position
value is totally reasonable according to the position relationships of all UUVs along the two-dimensional circle trajectory. The similar analysis can be conducted regarding the response trend of the position
value in
Figure 7b. From the pitch and heading figure, it can be shown that the attitudes of the UUVs present a period of adjustments because of model uncertainties and current disturbances. However, the pitch and heading of all follower UUVs finally converge to the leader UUV.
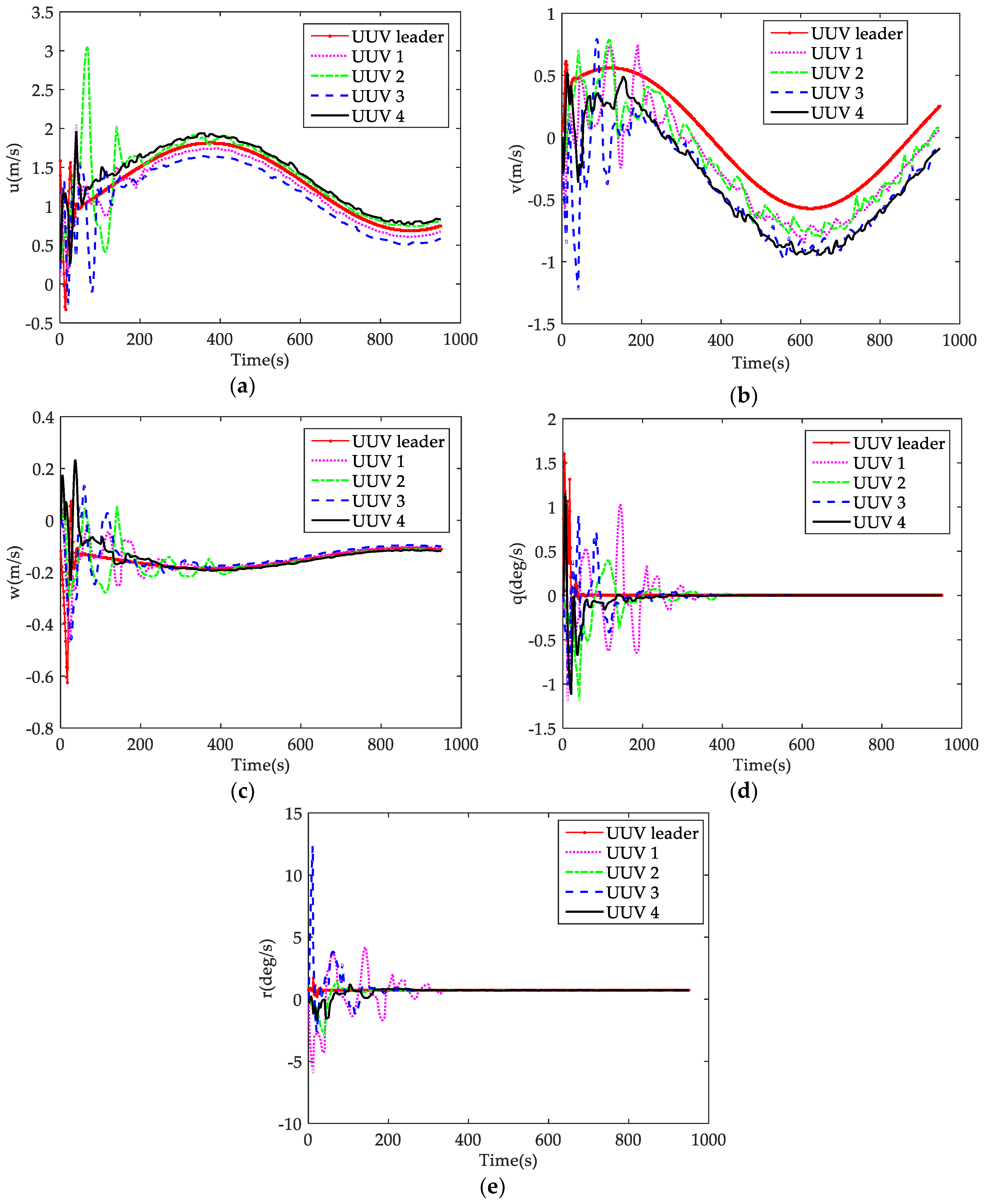
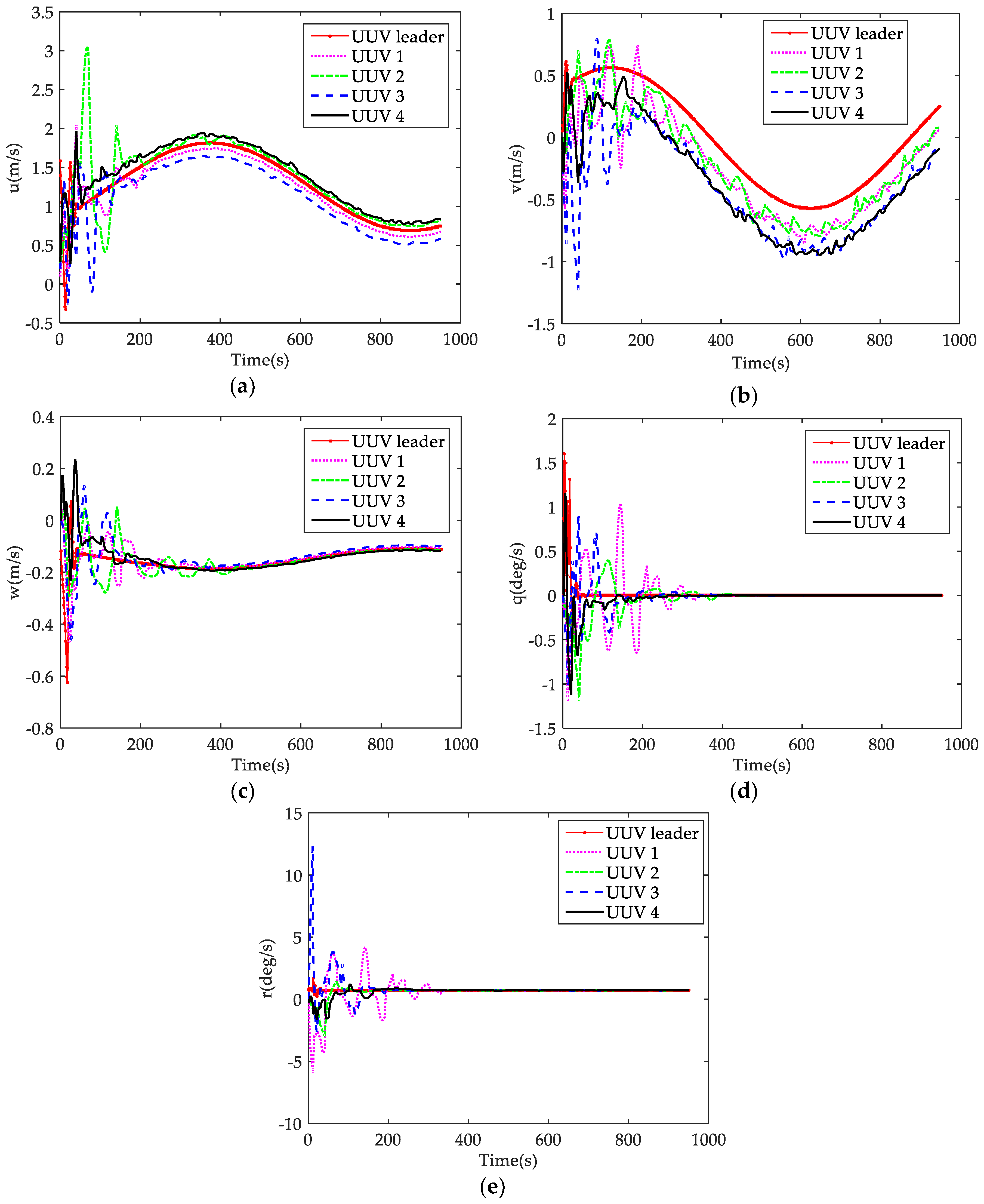
Figure 8 shows the velocity states of the leader-follower UUV formation. As shown in the figure, UUVs make a large adjustment of velocities early, and also a small adjustment when the followers converge to the desired formation structure after 300 s. This is because of changes of the transformation topology and the nonlinear function due to speed changes. It can also be observed that the follower UUVs located outside the desired spiral path (UUV 2 and UUV 4) have a greater surge velocity
than the follower UUVs located inside the path (UUV 1 and UUV 3), which can verify the correctness and effectiveness of the formation control algorithm. By reason of the desired helix path, it can be found that velocity
of all follower UUVs are mainly adjusted when the formation is maintained. The angular velocity
and
of all follower UUVs make adjustments before about 300 s, and also finally converge to the leader UUV.
6. Discussion
As is known, the leader-follower approach is a main formation control method of UUVs, and its basic principles and algorithms are relatively mature. In recent years, in order to obtain better application, the studies have focused on more practical problems when adopting the leader-follower approach. These problems mainly involve three aspects. One is the self-problem of UUVs for nonlinearity, under-actuation, control input saturation, and time-varying parameters. Another is the environment disturbance problem of ocean currents, waves, and obstacles. The last is the communication problem of delay, failure, and link noise interference.
To the best of our knowledge, most studies cover only one or two of the three aspects. Especially for communication problems, fewer studies involve communication failure and link noise interference, which have a seriously impact on the stability of formation control. However, for the purpose of developing a practical and effective formation control method, the three aspects are simultaneously considered in this paper. Moreover, in order to model and solve the problems, some novel means and ways are adopted. The main originalities of the paper can be summarized as follows:
First, three problems of model uncertainties, current disturbances, and unstable communication are simultaneously considered and modeled. Based on the three models, leader-follower formation controller is designed in the paper. More importantly, the stability and convergence condition of the controller is proposed and proved using the Lyapunov-Razumikhin theorem. Second, for model uncertainties, time-varying parameters and the nonlinearity of the UUV are modeled as a bounded nonlinear function. The nonlinear function exists as a certain probability meeting Bernoulli’s distribution, which is more in line with the actual situation. Third, communication failure and acoustic link noise interference are both modeled and solved by the method of converting to different communication topology problems. The communication failure problem is modeled and converted to a two-layer random switching communication topology. The acoustic noise interference problem is modeled and represented by effective communication topology weights.
As mentioned in
Section 2.1, the method and algorithm proposed also have application boundary conditions in mission scenarios, system scale, communication frequency, formation spacing, and so on. Further, in order to improve the method and make it a more practical implementation, the two following future research directions may need to be concerned. One research direction is to develop formation control algorithms based on limited state information of the leader, which can reduce the communication burden and communication delay. The other one is to add effective estimate algorithms for position and velocity states of both the leader and all follower UUVs to tolerate the unstable communication.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}