Stand-Alone GNSS Sensors as Velocity Seismometers: Real-Time Monitoring and Earthquake Detection


Abstract
:1. Introduction
2. Methodology
2.1. GNSS Instantaneous Velocity
2.2. Detection of First Arrivals
2.3. GNSS-Only Localization
3. Case Study
3.1. Data
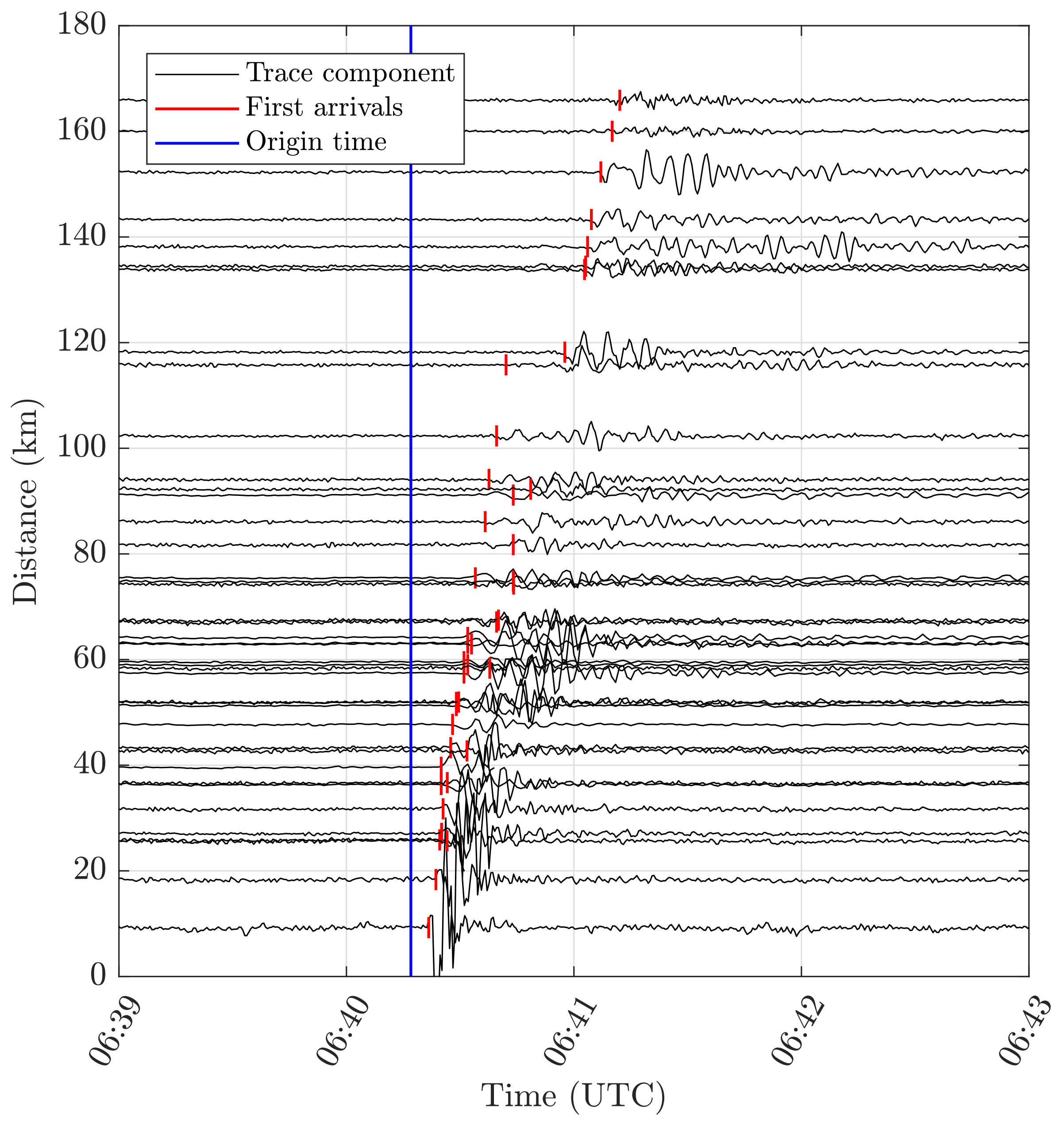
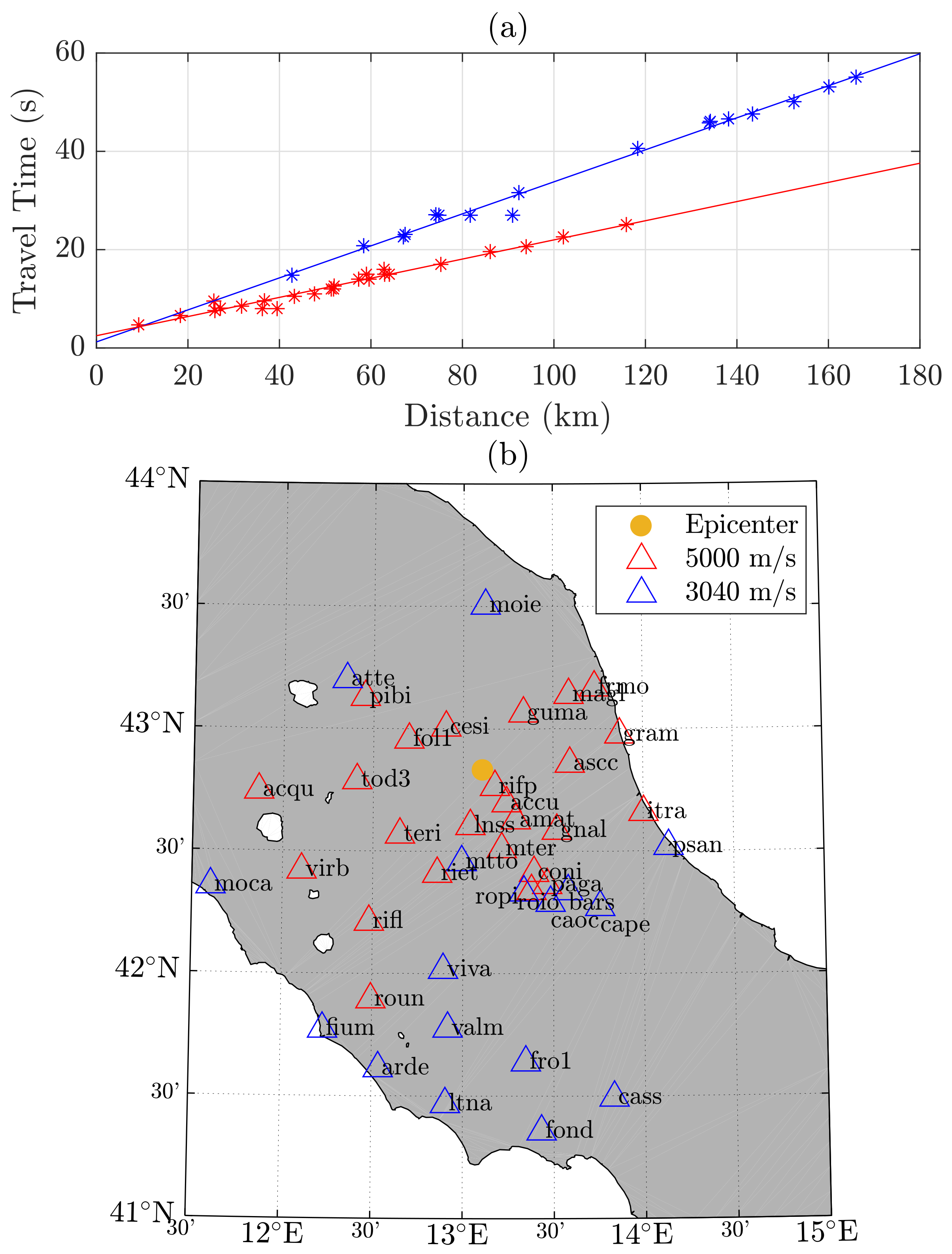
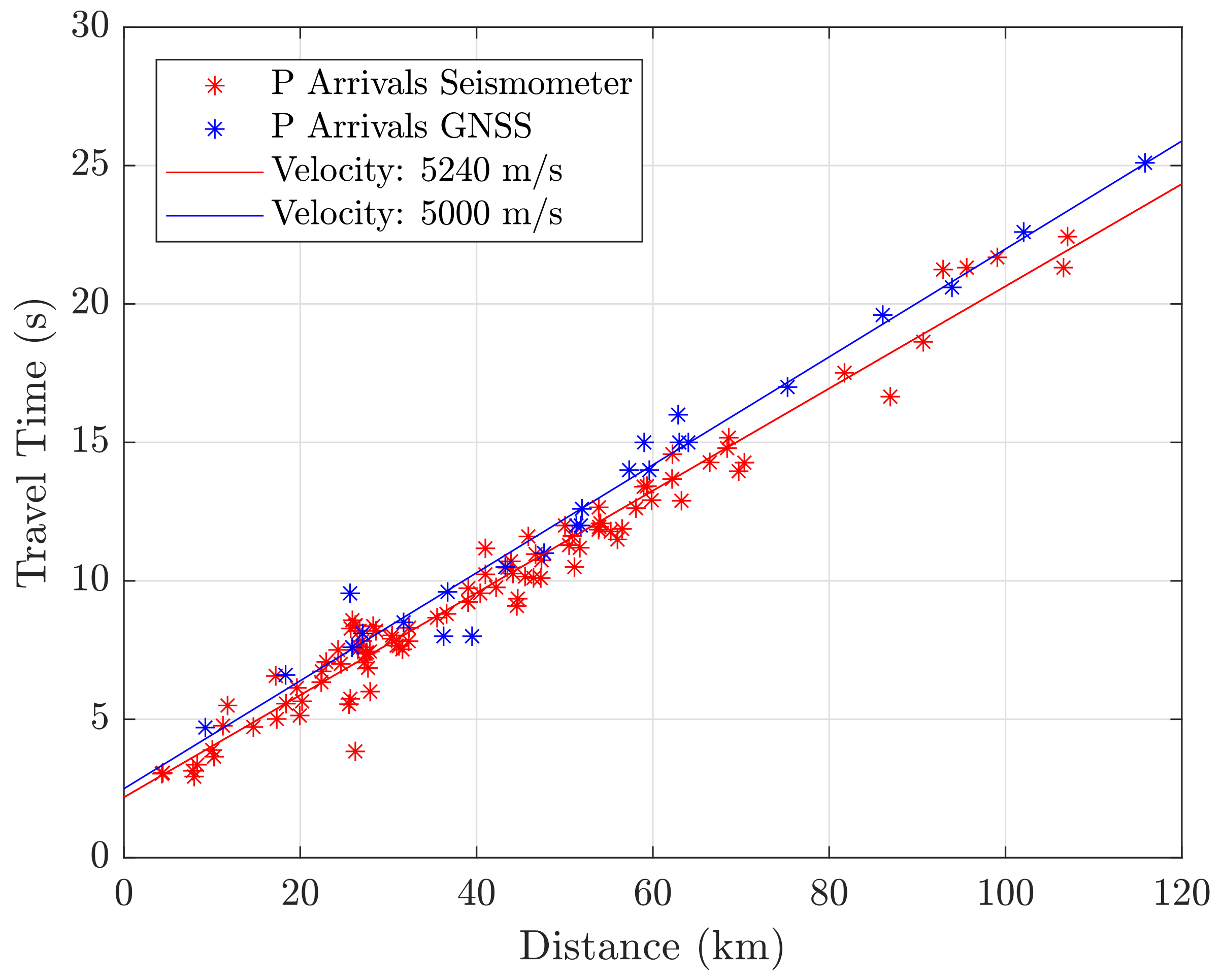
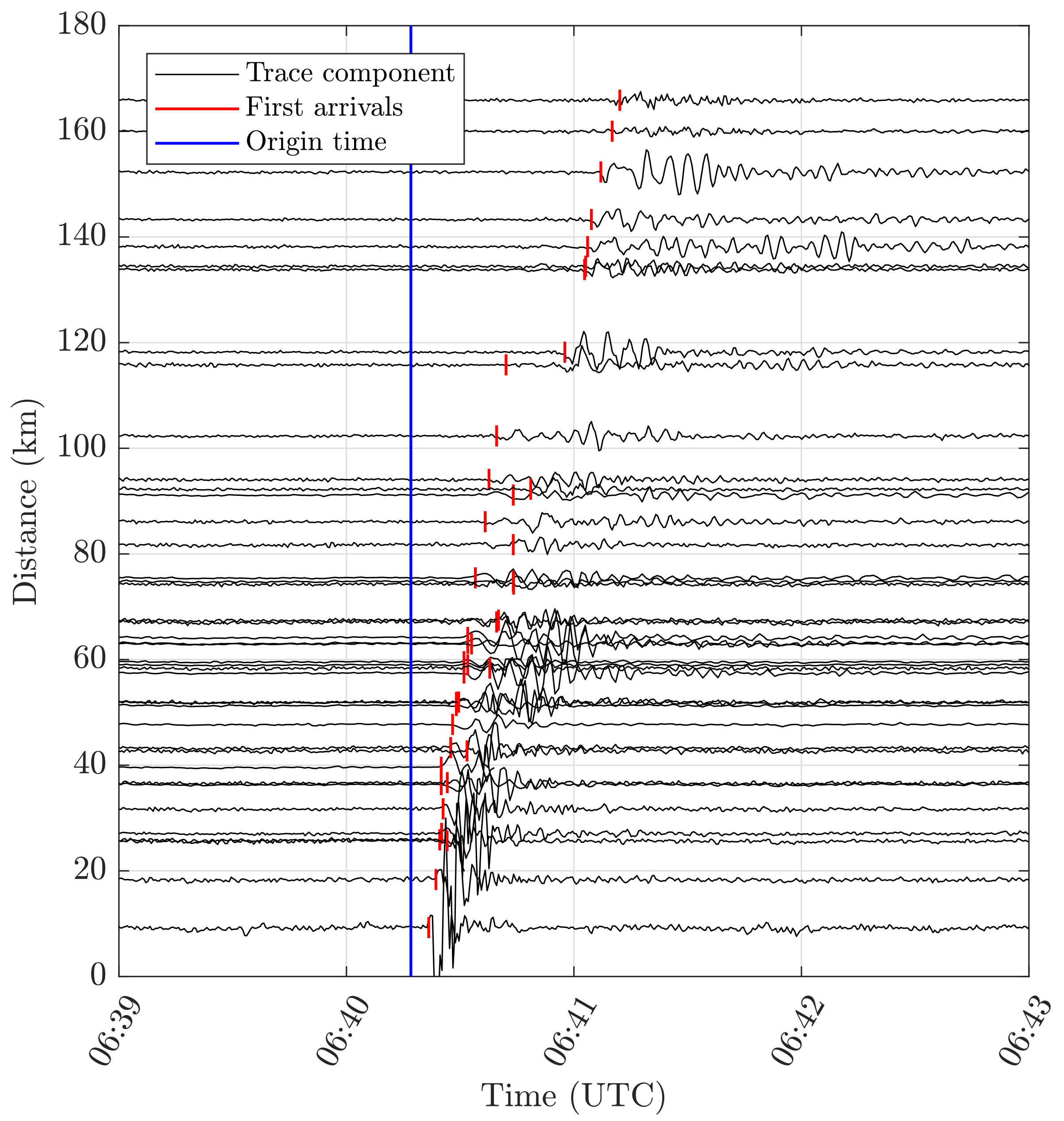
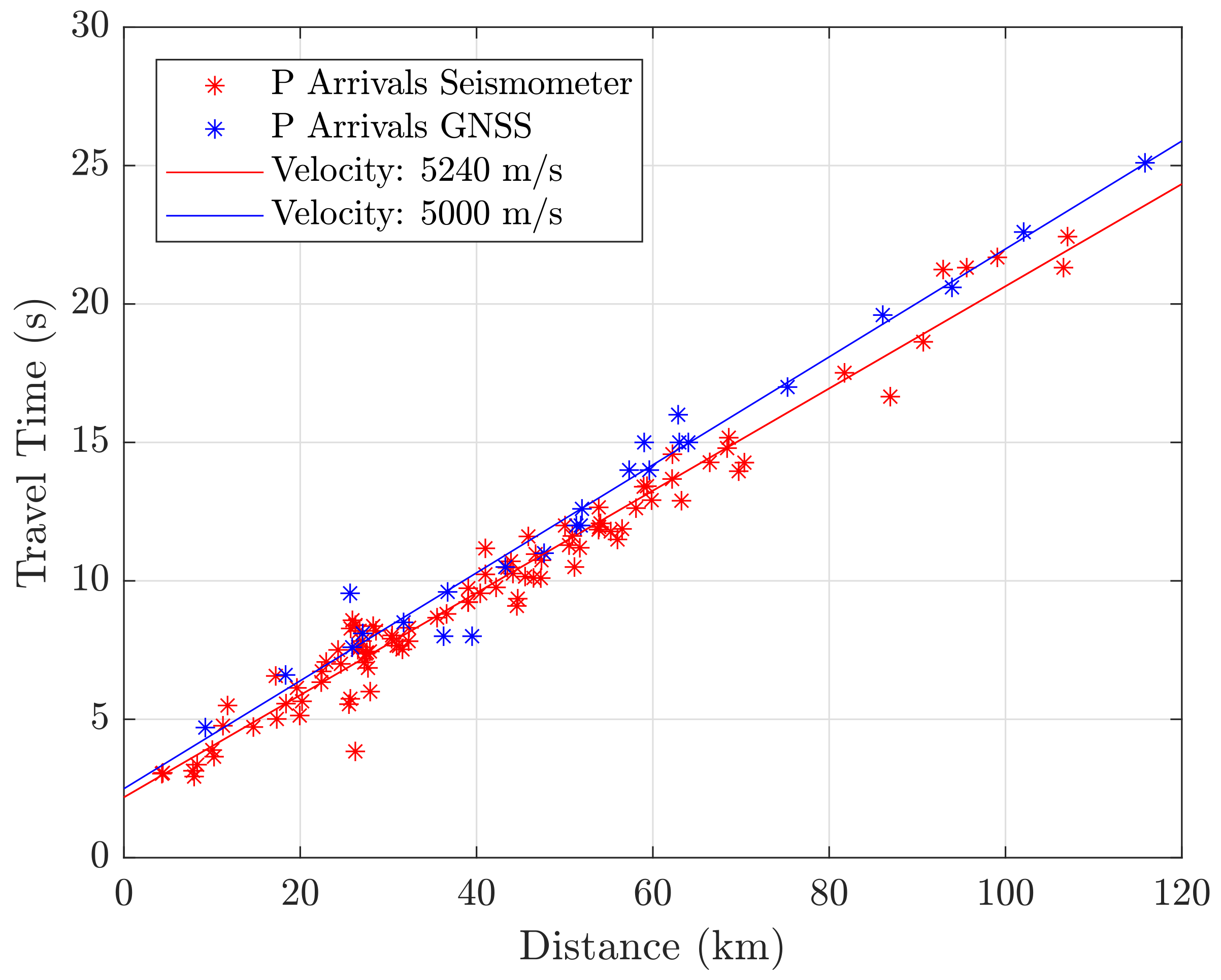
3.2. GNSS Seismograms, First Arrivals, and Seismic Velocities
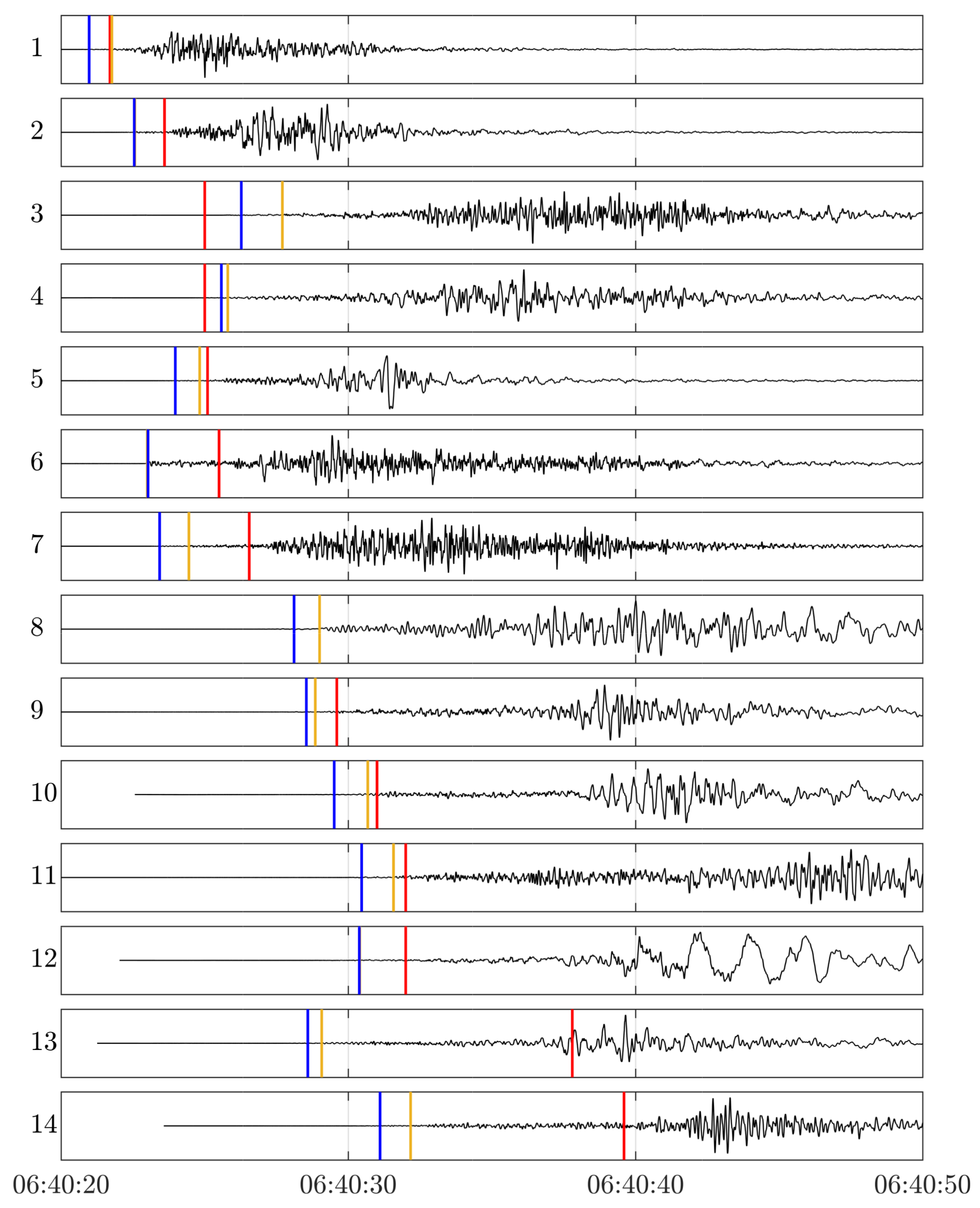
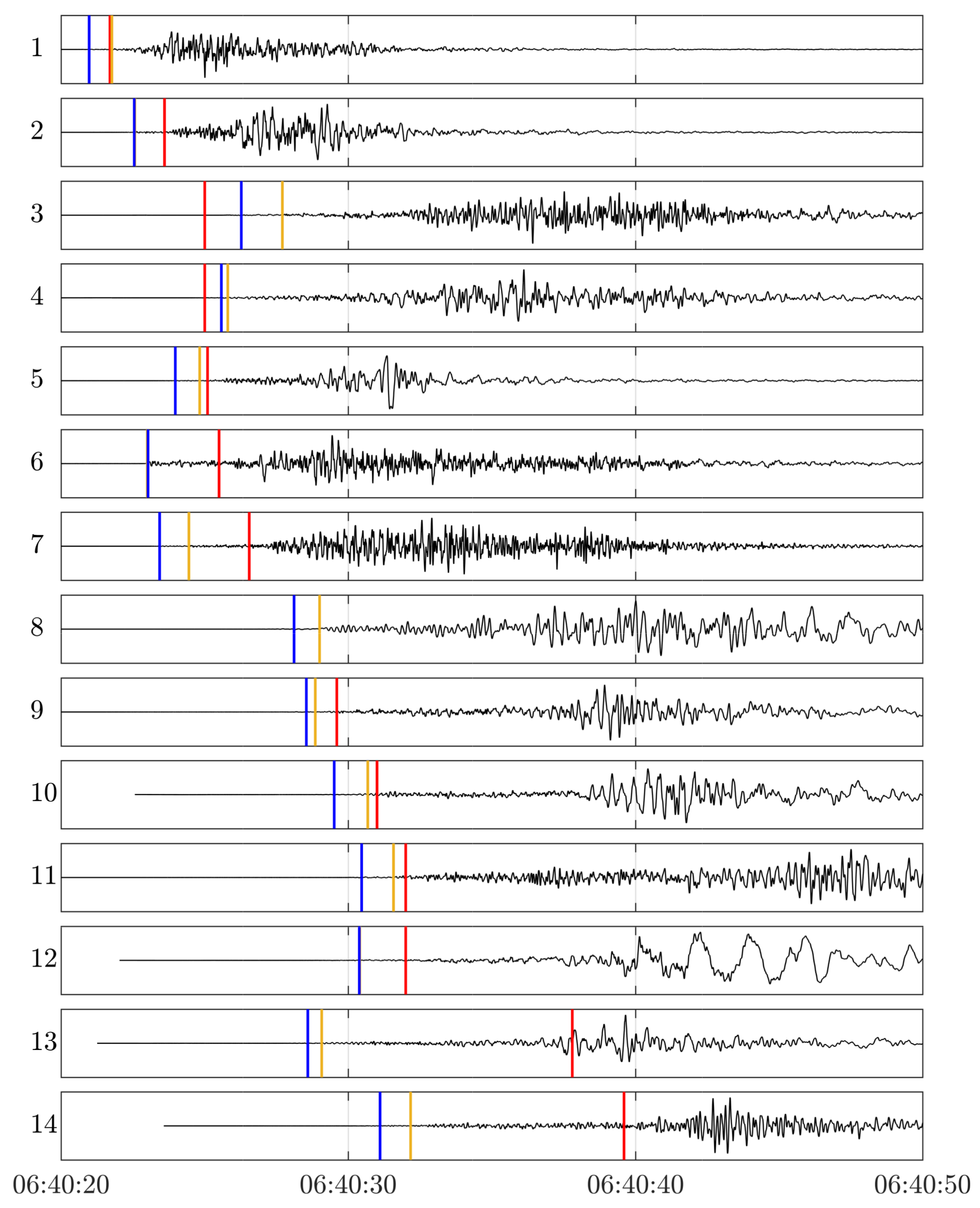
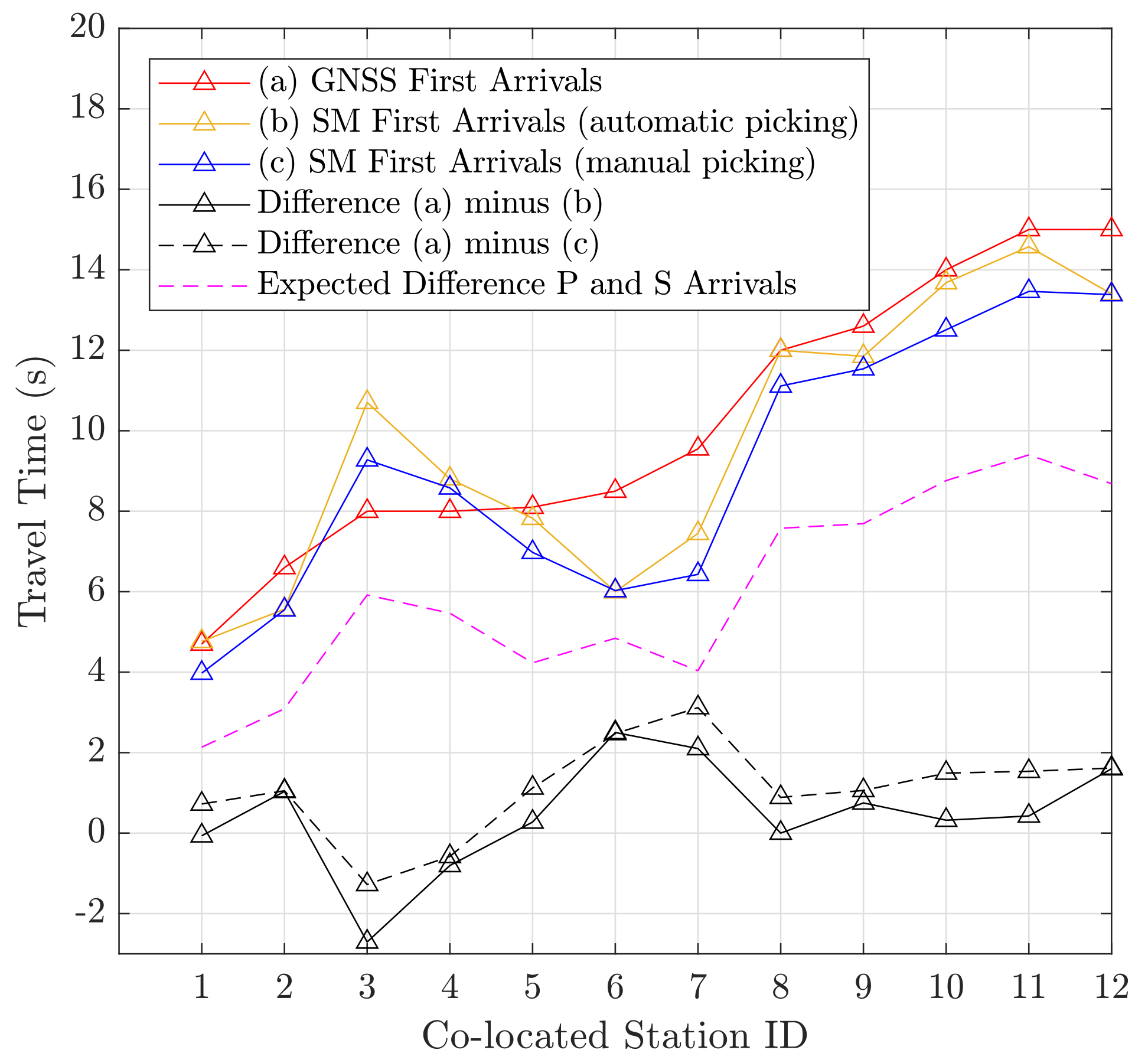
3.3. Validation of GNSS First Arrivals
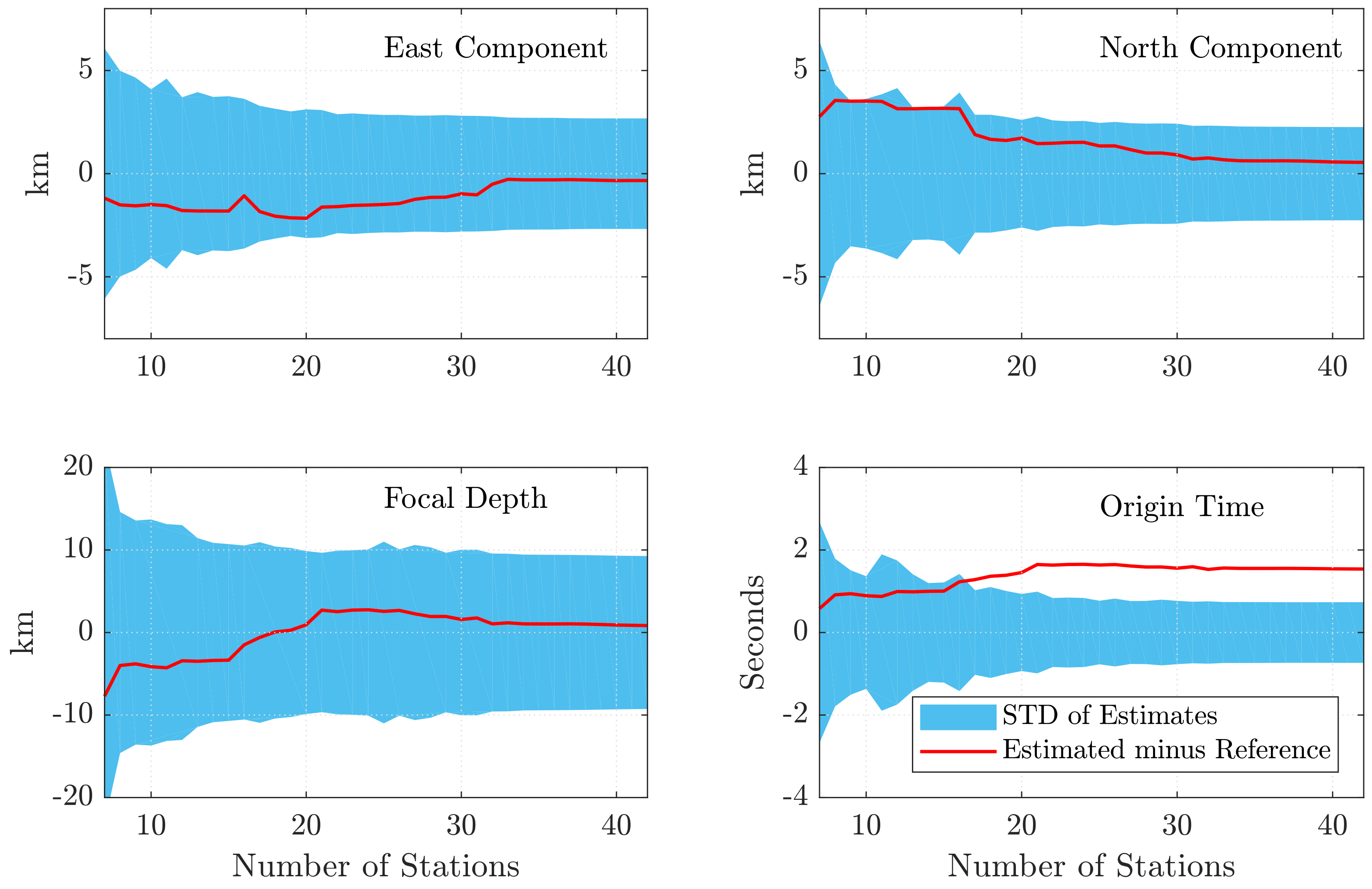
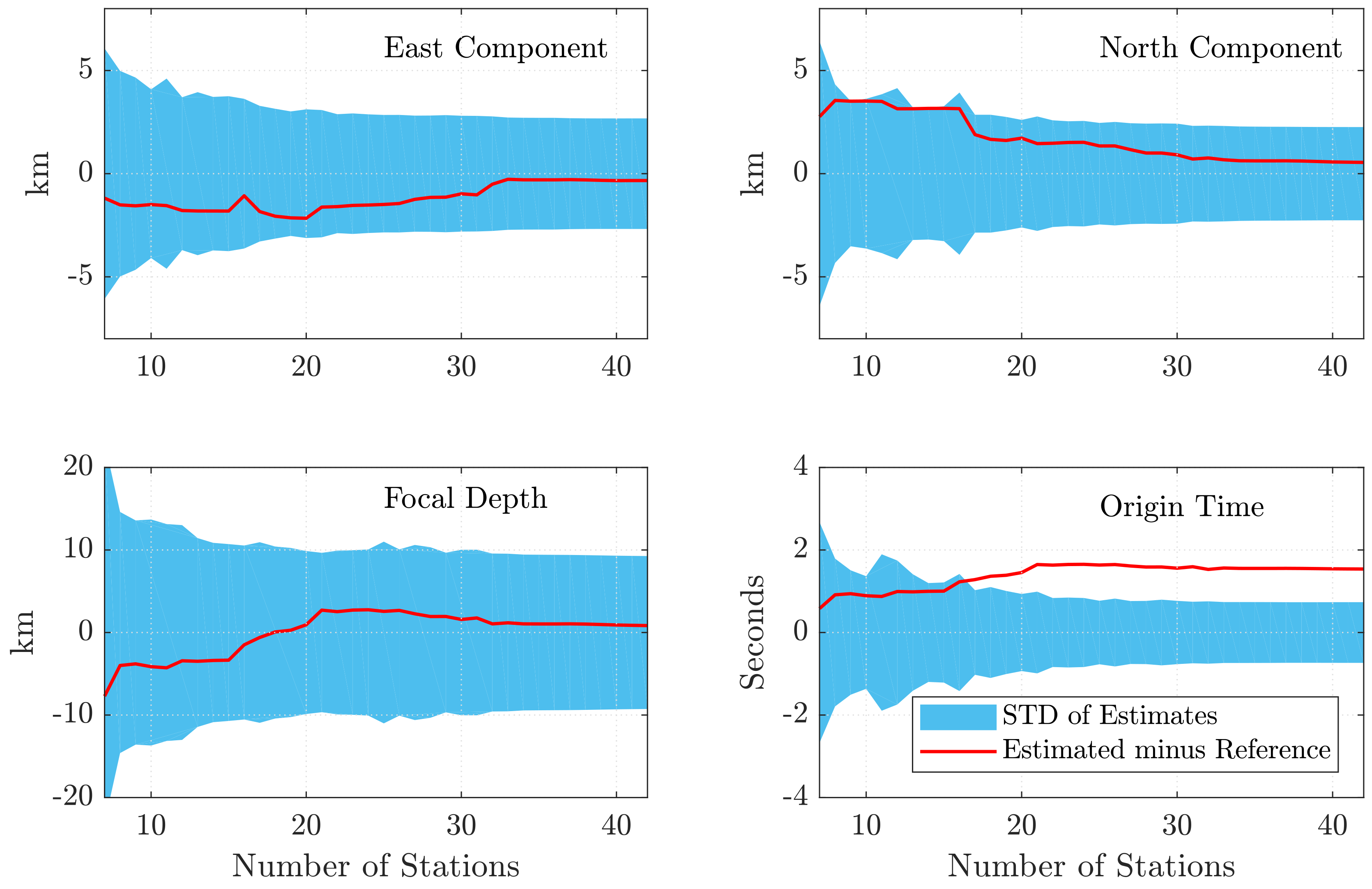
3.4. Localization
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Van Graas, F.; Soloview, A. Precise Velocity Estimation Using a Stand-Alone GPS Receiver. Navigation 2004, 51, 283–292. [Google Scholar] [CrossRef]
- Serrano, L.; Kim, D.; Langley, R.; Itani, K.; Ueno, M. A GPS Velocity Sensor: How Accurate Can It Be?—A First Look. ION NTM 2004, 2004, 875–885. [Google Scholar]
- Zhang, J.; Zhang, K.; Grenfell, R.; Deakin, R. On real-time high precision velocity determination for standalone GPS users. Surv. Rev. 2008, 40, 366–378. [Google Scholar] [CrossRef]
- Wieser, A. GPS Based Velocity Estimation and Its Application to An Odometer; Shaker Verlag: Aachen, Germany, 2007. [Google Scholar]
- Ding, W.; Wang, J. Precise Velocity Estimation with a Stand-Alone GPS Receiver. J. Navig. 2011, 64, 311–325. [Google Scholar] [CrossRef]
- Freda, P.; Angrisano, A.; Gaglione, S.; Troisi, S. Time-differenced carrier phases technique for precise GNSS velocity estimation. GPS Solut. 2015, 19, 335–341. [Google Scholar] [CrossRef]
- Hohensinn, R.; Geiger, A.; Meindl, M. Minimum Detectable Velocity based on GNSS Doppler Phase Observables. In Proceedings of the 2018 IEEE European Navigation Conference (ENC), Gothenburg, Sweden, 14–17 May 2018. [Google Scholar]
- Hohensinn, R.; Geiger, A.; Willi, D.; Meindl, M. Movement Detection Based on High-Precision Estimates of Instantaneous GNSS Station Velocity. J. Surv. Eng. 2018. forthcoming. [Google Scholar]
- Teunissen, P.; Montenbruck, O. Springer Handbook of Global Navigation Satellite Systems; Springer: Berlin, Germany, 2017. [Google Scholar]
- Ohta, Y.; Kobayashi, T.; Tsushima, H.; Miura, S.; Hino, R.; Takasu, T.; Fujimoto, H.; Iinuma, T.; Tachibana, K.; Demachi, T.; et al. Quasi real-time fault model estimation for near-field tsunami forecasting based on RTK-GPS analysis: Application to the 2011 Tohoku-Oki earthquake (Mw 9.0). J. Geophys. Res. Solid Earth 2012, 117. [Google Scholar] [CrossRef]
- Xu, P.; Shi, C.; Fang, R.; Liu, J.; Niu, X.; Zhang, Q.; Yanagidani, T. High-rate precise point positioning (PPP) to measure seismic wave motions: An experimental comparison of GPS PPP with inertial measurement units. J. Geod. 2013, 87, 361–372. [Google Scholar] [CrossRef]
- Larson, K.M.; Bodin, P.; Gomberg, J. Using 1-Hz GPS data to measure deformations caused by the Denali fault earthquake. Science 2003, 300, 1421–1424. [Google Scholar] [CrossRef] [PubMed]
- Grapenthin, R.; Freymueller, J.T. The dynamics of a seismic wave field: Animation and analysis of kinematic GPS data recorded during the 2011 Tohoku-Oki earthquake, Japan. Geophys. Res. Lett. 2011, 38. [Google Scholar] [CrossRef]
- Bock, Y.; Prawirodirdjo, L.; Melbourne, T.I. Detection of arbitrarily large dynamic ground motions with a dense high-rate GPS network. Geophys. Res. Lett. 2004, 31. [Google Scholar] [CrossRef] [Green Version]
- Guillaume, S.; Geiger, A. Real-Time Small Movement Detection with a Single GPS Carrier Phase Receiver. In Proceedings of the European Navigation Conference, Geneva, Switzerland, 29–31 May 2007; pp. 506–516. [Google Scholar]
- Guillaume, S.; Geiger, A.; Forrer, F. G-MoDe Detection of Small and Rapid Movements by a Single GPS Carrier Phase Receiver. In VII Hotine-Marussi Symposium on Mathematical Geodesy: Proceedings of the Symposium in Rome, 6–10 June, 2009; Sneeuw, N., Novák, P., Crespi, M., Sansò, F., Eds.; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Colosimo, G.; Crespi, M.; Mazzoni, A. Real-time GPS seismology with a stand-alone receiver: A preliminary feasibility demonstration. J. Geophys. Res. Solid Earth 2011, 116. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Ge, M.; Guo, B.; Wickert, J.; Schuh, H. Temporal point positioning approach for real-time GNSS seismology using a single receiver. Geophys. Res. Lett. 2013, 40, 5677–5682. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Guo, B.; Lu, C.; Ge, M.; Wickert, J.; Schuh, H. Real-time GNSS seismology using a single receiver. Geophys. J. Int. 2014, 198, 72–89. [Google Scholar] [CrossRef] [Green Version]
- Crowell, B.W.; Bock, Y.; Squibb, M.B. Demonstration of earthquake early warning using total displacement waveforms from real-time GPS networks. Seismol. Res. Lett. 2009, 80, 772–782. [Google Scholar] [CrossRef]
- Crowell, B.W.; Schmidt, D.A.; Bodin, P.; Vidale, J.E.; Baker, B.; Barrientos, S.; Geng, J. G-FAST earthquake early warning potential for great earthquakes in Chile. Seismol. Res. Lett. 2018, 89, 542–556. [Google Scholar] [CrossRef]
- Kawamoto, S.; Ohta, Y.; Hiyama, Y.; Todoriki, M.; Nishimura, T.; Furuya, T.; Sato, Y.; Yahagi, T.; Miyagawa, K. REGARD: A new GNSS-based real-time finite fault modeling system for GEONET. J. Geophys. Res. Solid Earth 2017, 122, 1324–1349. [Google Scholar] [CrossRef]
- Allen, R.M.; Ziv, A. Application of real-time GPS to earthquake early warning. Geophys. Res. Lett. 2011, 38. [Google Scholar] [CrossRef] [Green Version]
- Goldberg, D.; Bock, Y. Self-contained local broadband seismogeodetic early warning system: Detection and location. J. Geophys. Res. Solid Earth 2017, 122, 3197–3220. [Google Scholar] [CrossRef]
- Grapenthin, R.; West, M.; Tape, C.; Gardine, M.; Freymueller, J. Single-Frequency Instantaneous GNSS Velocities Resolve Dynamic Ground Motion of the 2016 Mw 7.1 Iniskin, Alaska, Earthquake. Seismol. Res. Lett. 2018, 89, 1040–1048. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Kirubarajan, T.; Li, X.R. Estimation with Applications to Tracking and Navigation; John Wiley & Sons, Inc.: New York, NY, USA, 2002. [Google Scholar]
- Leick, A.; Rapoport, L.; Tatarnikov, D. GPS Satellite Surveying; John Wiley & Sons: New York, NY, USA, 2015. [Google Scholar]
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Wasle, E. GNSS—Global Navigation Satellite Systems; Springer: Wien, Austria, 2008. [Google Scholar]
- Japan Meteorological Agency. The Seismological Bulletin of Japan, User’s Guide. 2018. Available online: http://www.data.jma.go.jp/svd/eqev/data/bulletin/catalog/notese.html (accessed on 18 August 2018).
- Rete Integrata Nazionale GPS. High-Rate GPS Data Archive of the 2016 Central Italy Seismic Sequence. 2018. Available online: http://ring.gm.ingv.it/?p=1333 (accessed on 18 August 2018).
- Avallone, A.; Latorre, D.; Serpelloni, E.; Cavaliere, A.; Herrero, A.; Cecere, G.; D’Agostino, N.; D’Ambrosio, C.; Devoti, R.; Giuliani, R.; et al. Coseismic displacement waveforms for the 2016 August 24 Mw 6.0 Amatrice earthquake (central Italy) carried out from High-Rate GPS data. Ann. Geophys. 2016, 59. [Google Scholar] [CrossRef]
- Herrmann, R.B.; Malagnini, L.; Munafò, I. Regional moment tensors of the 2009 L’Aquila earthquake sequence. Bull. Seismol. Soc. Am. 2011, 101, 975–993. [Google Scholar] [CrossRef]
- Chiaraluce, L.; Di Stefano, R.; Tinti, E.; Scognamiglio, L.; Michele, M.; Casarotti, E.; Cattaneo, M.; De Gori, P.; Chiarabba, C.; Monachesi, G.; et al. The 2016 central Italy seismic sequence: A first look at the mainshocks, aftershocks, and source models. Seismol. Res. Lett. 2017, 88, 757–771. [Google Scholar] [CrossRef]
- Michele, M.; Di Stefano, R.; Chiaraluce, L.; Cattaneo, M.; De Gori, P.; Monachesi, G.; Latorre, D.; Marzorati, S.; Valoroso, L.; Ladina, C.; et al. The Amatrice 2016 seismic sequence: A preliminary look at the mainshock and aftershocks distribution. Ann. Geophys. 2016, 59. [Google Scholar] [CrossRef]
- Observatories and Research Facilities for European Seismology. ORFEUS Strong Motion Data Portals. 2018. Available online: https://www.orfeus-eu.org/data/strong/ (accessed on 11 September 2018).
- Luzi, L.; Puglia, R.; Russo, E.; Orfeus, W. Engineering strong motion database, version 1.0. Ist. Naz. Di Geofis. E Vulcanol. Obs. Res. Facil. Eur. Seismol. 2016. [Google Scholar] [CrossRef]
- Kalkan, E. An Automatic P-Phase Arrival-Time Picker. Bull. Seismol. Soc. Am. 2016, 106, 971–986. [Google Scholar] [CrossRef]
- Chiarabba, C.; Amato, A.; Anselmi, M.; Baccheschi, P.; Bianchi, I.; Cattaneo, M.; Cecere, G.; Chiaraluce, L.; Ciaccio, M.; De Gori, P.; et al. The 2009 L’Aquila (central Italy) MW 6.3 earthquake: Main shock and aftershocks. Geophys. Res. Lett. 2009, 36. [Google Scholar] [CrossRef]
- Akkar, S.; Bommer, J.J. Empirical equations for the prediction of PGA, PGV, and spectral accelerations in Europe, the Mediterranean region, and the Middle East. Seismol. Res. Lett. 2010, 81, 195–206. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date and Time (UTC) | Moment Magnitude | Latitude (deg) | Longitude (deg) | Depth (km) |
|---|---|---|---|---|
| 2016/10/30 06:40:17 | 6.5 | 42.83 | 13.11 | 10 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hohensinn, R.; Geiger, A. Stand-Alone GNSS Sensors as Velocity Seismometers: Real-Time Monitoring and Earthquake Detection. Sensors 2018, 18, 3712. https://doi.org/10.3390/s18113712
Hohensinn R, Geiger A. Stand-Alone GNSS Sensors as Velocity Seismometers: Real-Time Monitoring and Earthquake Detection. Sensors. 2018; 18(11):3712. https://doi.org/10.3390/s18113712
Chicago/Turabian StyleHohensinn, Roland, and Alain Geiger. 2018. "Stand-Alone GNSS Sensors as Velocity Seismometers: Real-Time Monitoring and Earthquake Detection" Sensors 18, no. 11: 3712. https://doi.org/10.3390/s18113712
APA StyleHohensinn, R., & Geiger, A. (2018). Stand-Alone GNSS Sensors as Velocity Seismometers: Real-Time Monitoring and Earthquake Detection. Sensors, 18(11), 3712. https://doi.org/10.3390/s18113712