On the Impact of Mobility on Battery-Less RF Energy Harvesting System Performance


Abstract
1. Introduction
2. Energy Trade-Offs for Mobile Systems
2.1. Charging Problem
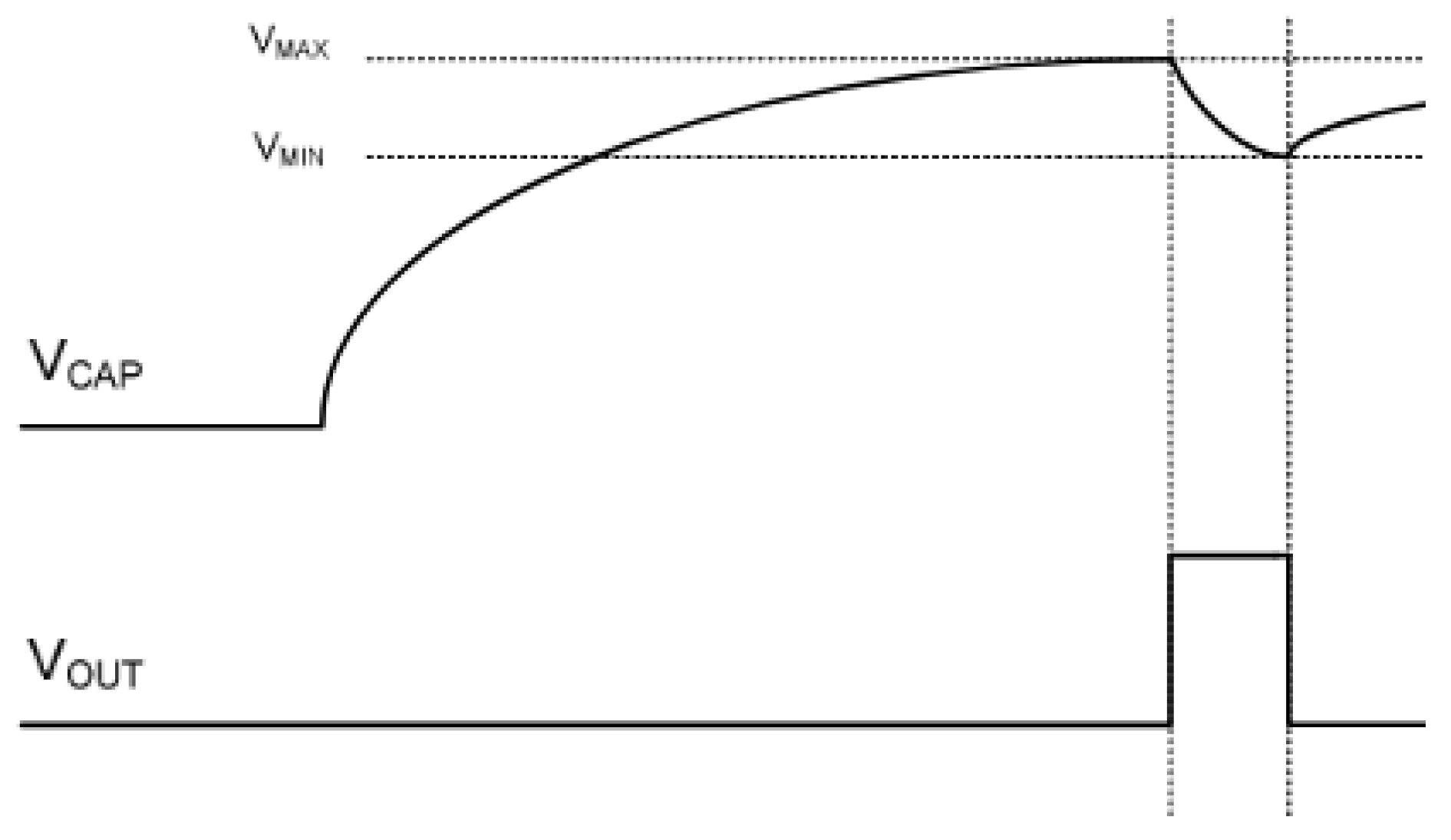
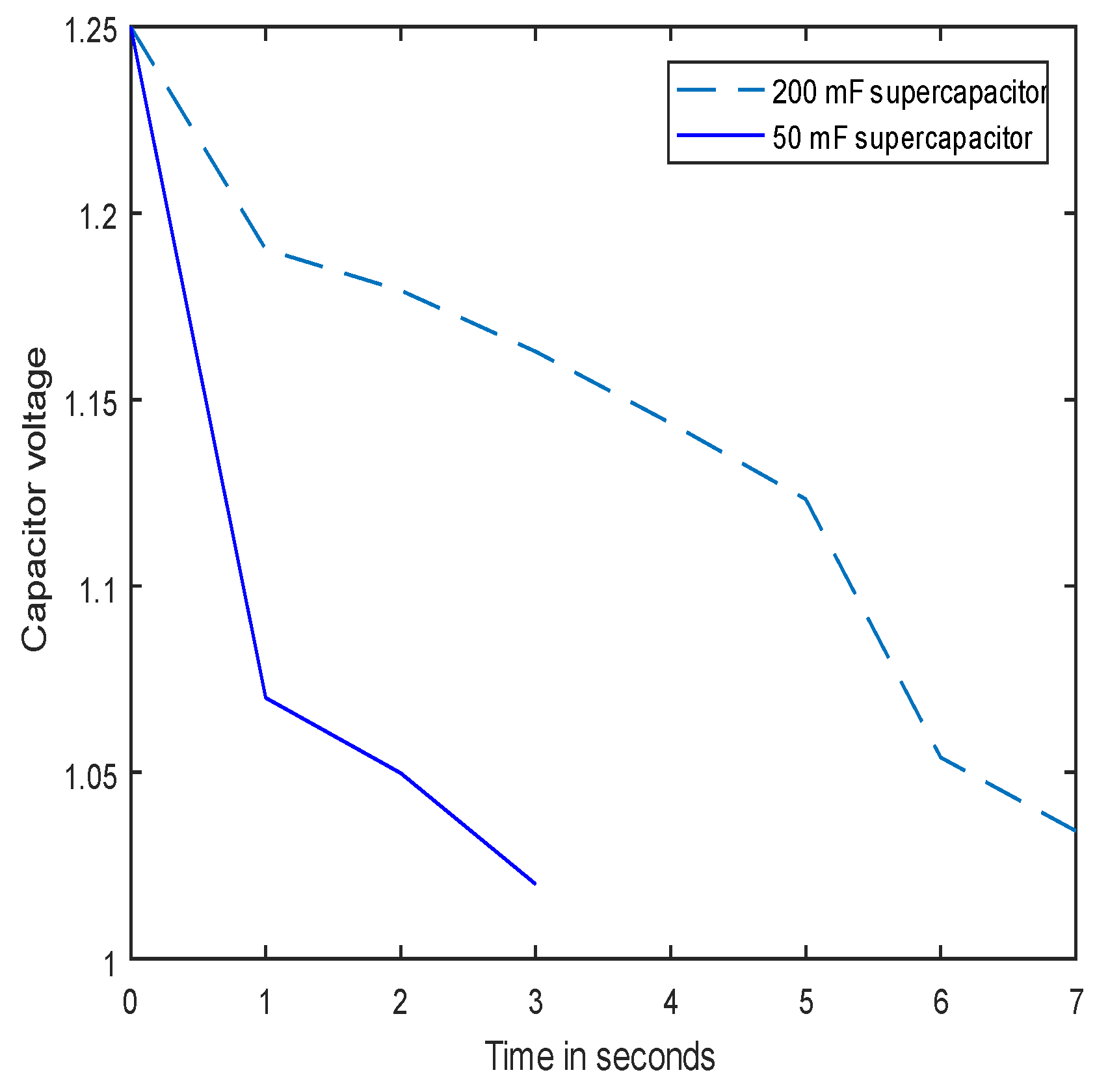
2.2. Keeping the Charge
2.3. Task Size
3. Approach
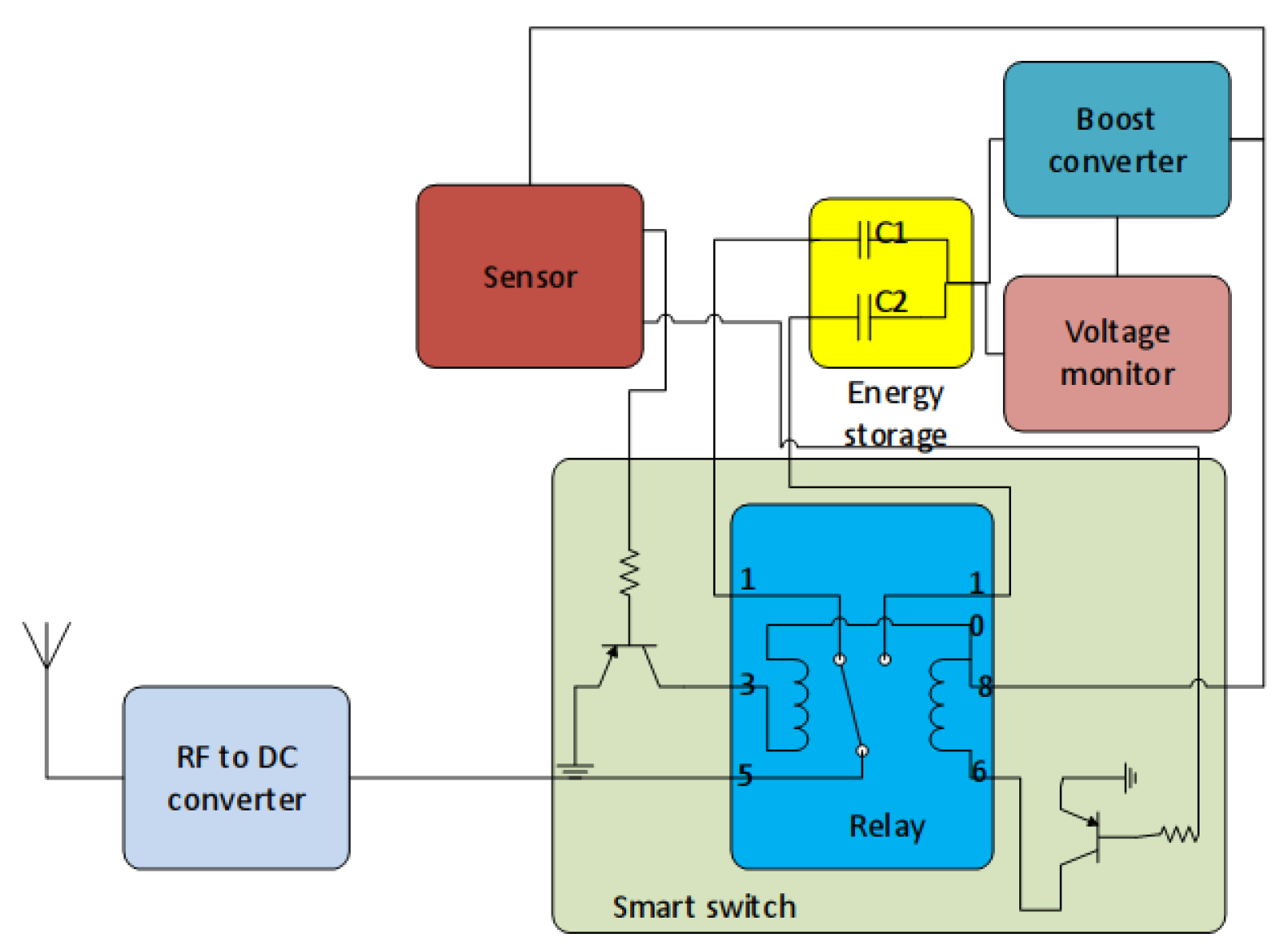
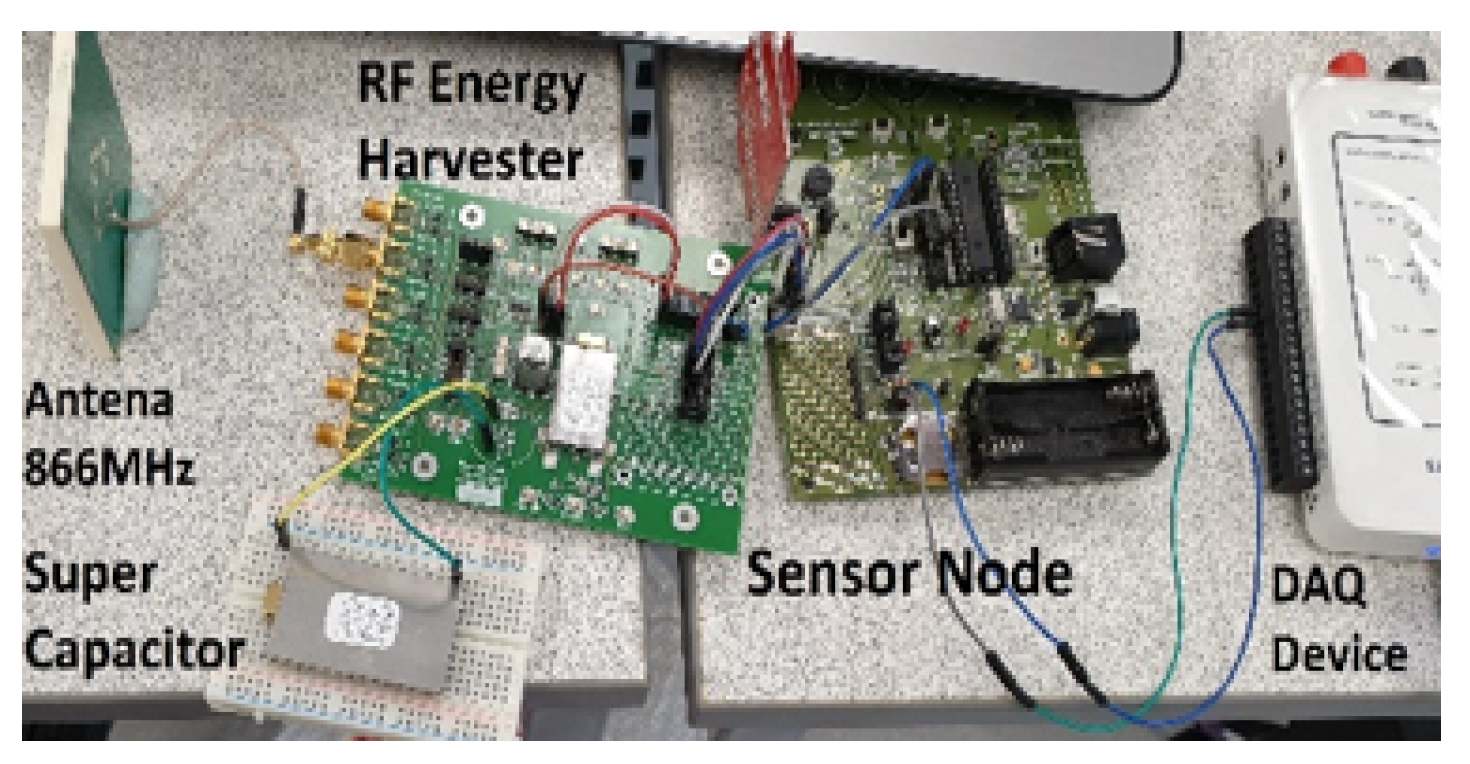
3.1. Hardware Platform
3.2. Switching Algorithm
| Algorithm 1: Switching algorithm. |
 |
4. Simulations
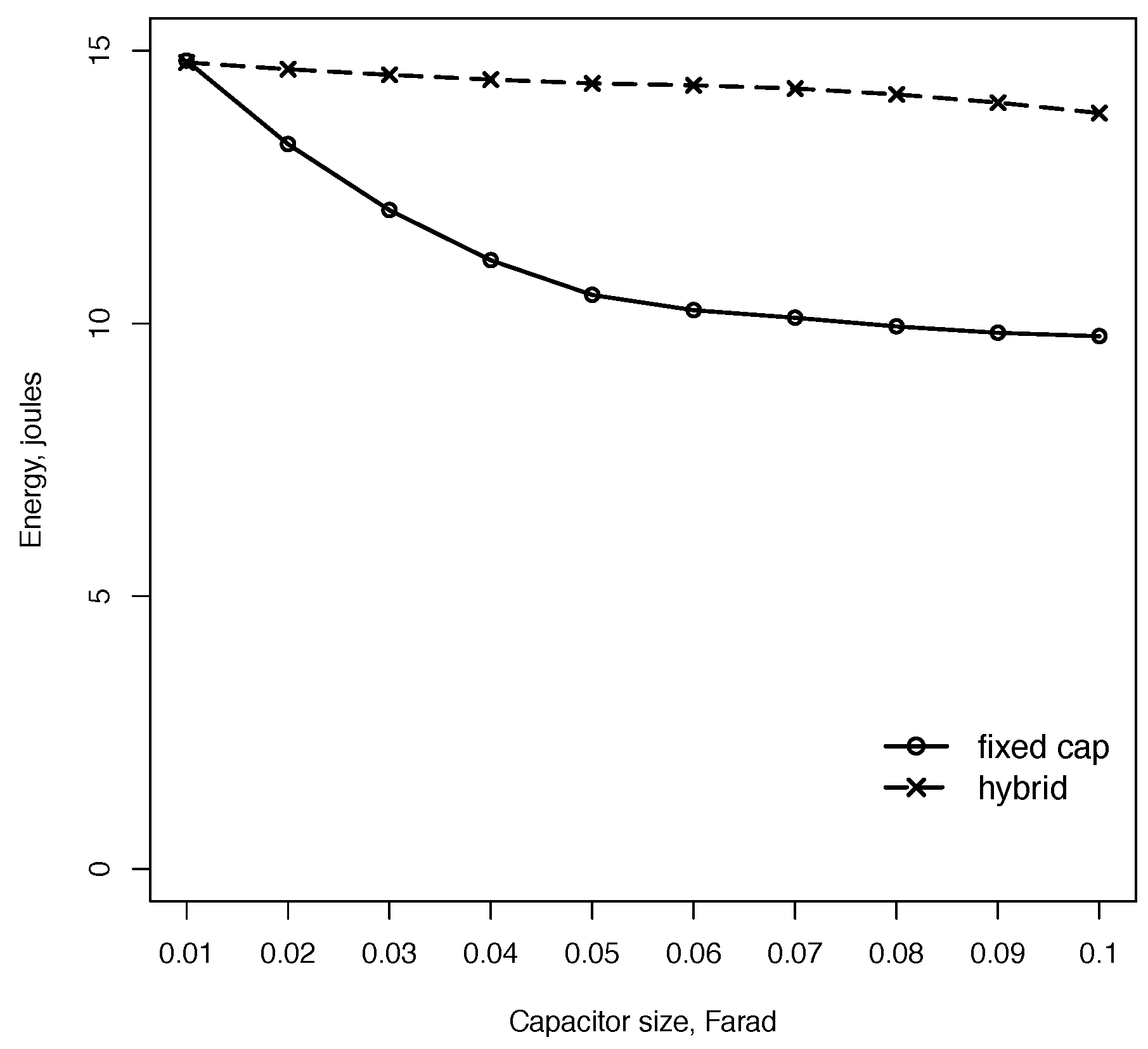
4.1. Usable Harvested Energy
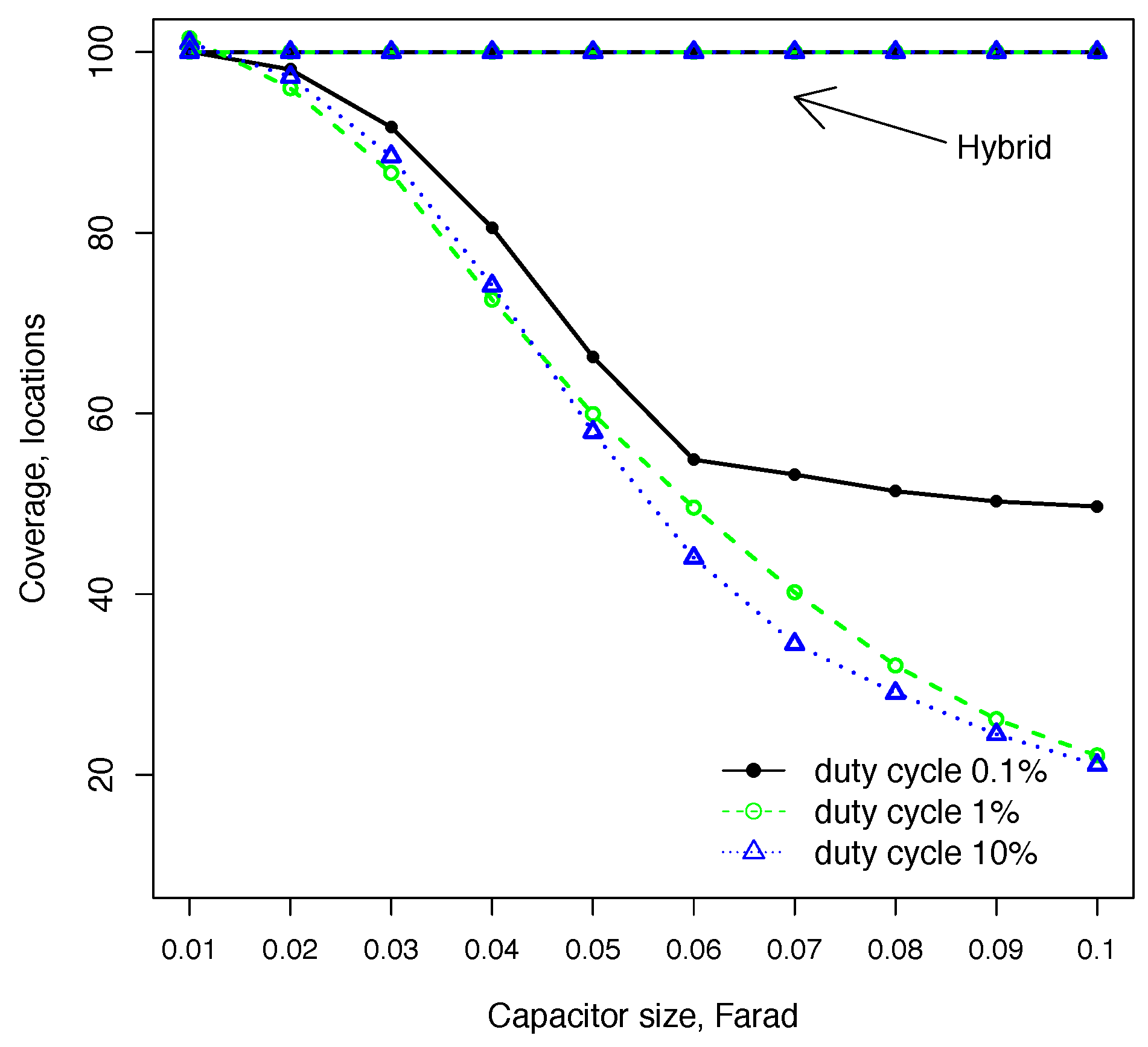
4.2. Sensor Coverage
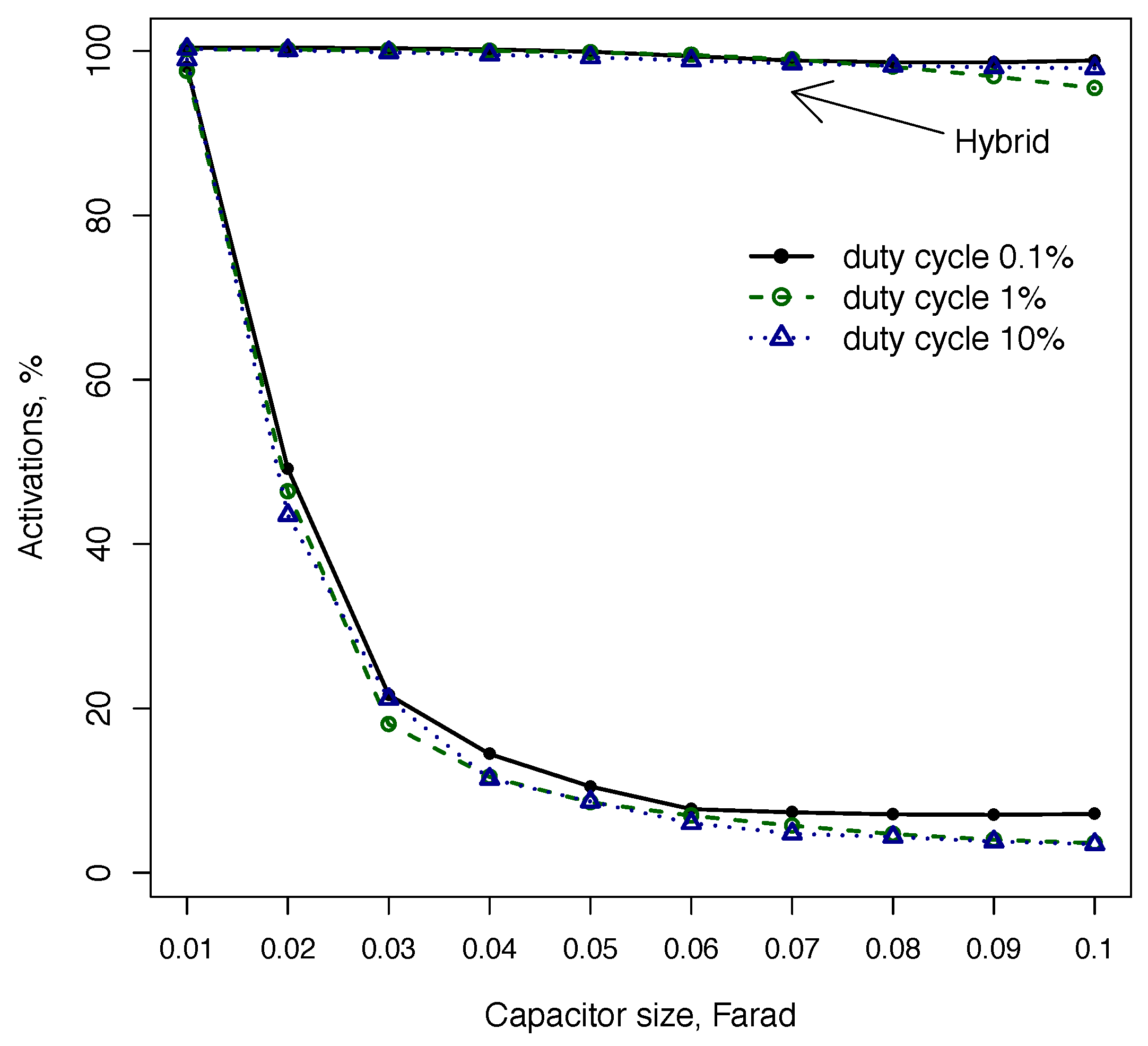
4.3. Sensor Activations
4.4. Available Energy
5. Prototype
5.1. Charging Time
5.2. Sensor Node Lifetime
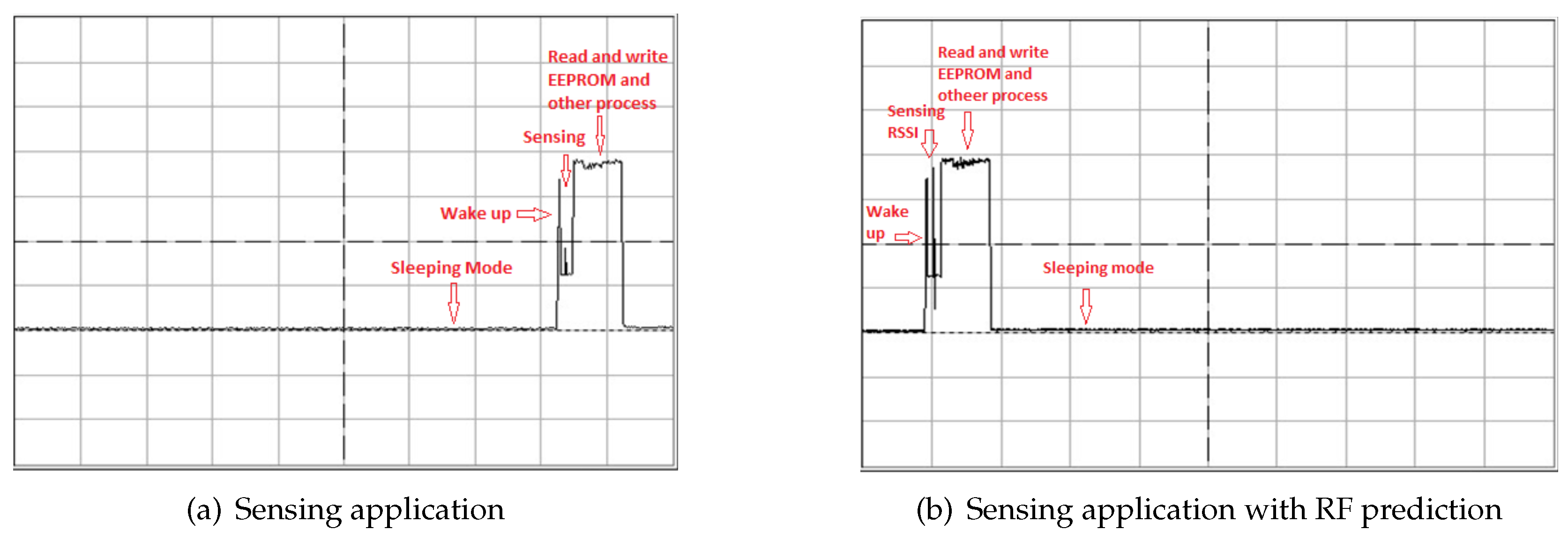
5.3. Dynamic Capacitor Switching
6. Related Work
7. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hester, J.; Sorber, J. Flicker: Rapid Prototyping for the Batteryless Internet-of-Things. In Proceedings of the 15th ACM Conference on Embedded Network Sensor Systems, Delft, The Netherlands, 6–8 November 2017; p. 13. [Google Scholar]
- Merrett, G.V.; Weddell, A.S. Supercapacitor leakage in energy-harvesting sensor nodes: Fact or fiction? In Proceedings of the 2012 Ninth International Conference on Networked Sensing (INSS), Antwerp, Belgium, 11–14 June 2012; pp. 1–5. [Google Scholar]
- Zhang, Y.; Yang, H. Modeling and characterization of supercapacitors for wireless sensor network applications. J. Power Sources 2011, 196, 4128–4135. [Google Scholar] [CrossRef]
- Yang, H.; Zhang, Y. Analysis of Supercapacitor Energy Loss for Power Management in Environmentally Powered Wireless Sensor Nodes. IEEE Trans. Power Electron. 2013, 28, 5391–5403. [Google Scholar] [CrossRef]
- Gummeson, J.; Clark, S.S.; Fu, K.; Ganesan, D. On the Limits of Effective Hybrid Micro energy Harvesting on Mobile CRFID Sensors. In Proceedings of the 8th International Conference on Mobile Systems, Applications, and Services, San Francisco, CA, USA, 15–18 June 2010; ACM: New York, NY, USA, 2010; pp. 195–208. [Google Scholar]
- Powercast. P21XX Powerharvester Chipset Reference Design Evaluation Board; Powercast: Pittsburgh, PA, USA, 2018; pp. 1–11. [Google Scholar]
- Merz, C.; Kupris, G.; Niedernhuber, M. Design and optimization of a radio frequency energy harvesting system for energizing low power devices. In Proceedings of the 2014 International Conference on Applied Electronics, Pilsen, Czech Republic, 9–10 September 2014; pp. 209–212. [Google Scholar]
- Calabrese, F.; Diao, M.; Lorenzo, G.D.; Ferreira, J.; Ratti, C. Understanding individual mobility patterns from urban sensing data: A mobile phone trace example. Transp. Res. Part C Emerg. Technol. 2013, 26, 301–313. [Google Scholar] [CrossRef]
- Ellwood, S.; Newman, C.; Montgomery, R.; Nicosia, V.; Buesching, C.; Markham, A.; Mascolo, C.; Trigoni, N.; Pasztor, B.; Dyo, V.; et al. An active radio frequency identification system capable of identifying co locations and social structure: Validation with a wild free ranging animal. Methods Ecol. Evol. 2017, 8, 1822–1831. [Google Scholar] [CrossRef]
- Musolesi, M.; Mascolo, C. CAR: Context-Aware Adaptive Routing for Delay-Tolerant Mobile Networks. IEEE Trans. Mob. Comput. 2008, 8, 246–260. [Google Scholar] [CrossRef]
- Lindgren, A.; Mascolo, C.; Lonergan, M.; McConnell, B. Seal-2-Seal: A delay-tolerant protocol for contact logging in wildlife monitoring sensor networks. In Proceedings of the 2008 5th IEEE International Conference on Mobile Ad Hoc and Sensor Systems, Atlanta, GA, USA, 29 September–2 October 2008; pp. 321–327. [Google Scholar]
- Noulas, A.; Scellato, S.; Lathia, N.; Mascolo, C. Mining User Mobility Features for Next Place Prediction in Location-Based Services. In Proceedings of the 2012 IEEE 12th International Conference on Data Mining, Brussels, Belgium, 10–13 December 2012; pp. 1038–1043. [Google Scholar]
- Hristova, D.; Noulas, A.; Brown, C.; Musolesi, M.; Mascolo, C. A multilayer approach to multiplexity and link prediction in online geo-social networks. EPJ Data Sci. 2016, 5, 24. [Google Scholar] [CrossRef]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. Trans. ASME J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Grewal, M.S.; Andrews, A.P. Kalman Filtering: Theory and Practice Using MATLAB; Wiley-Blackwell: Hoboken, NJ, USA, 2008. [Google Scholar]
- Savanth, A.; Bellanger, M.; Weddell, A.; Myers, J.; Kauer, M. Energy neutral sensor system with micro-scale photovoltaic and thermoelectric energy harvesting. J. Phys. Conf. Ser. 2018, 1052, 012069. [Google Scholar] [CrossRef]
- Mishra, D.; De, S.; Chowdhury, K.R. Charging Time Characterization for Wireless RF Energy Transfer. IEEE Trans. Circuits Syst. II Express Briefs 2015, 62, 362–366. [Google Scholar] [CrossRef]
- Faranda, R. A new parameters identification procedure for simplified double layer capacitor two-branch model. Electr. Power Syst. Res. 2010, 80, 363–371. [Google Scholar] [CrossRef]
- Zhu, T.; Zhong, Z.; Gu, Y.; He, T.; Zhang, Z.L. Leakage-aware Energy Synchronization for Wireless Sensor Networks. In Proceedings of the 7th International Conference on Mobile Systems, Applications, and Services, Krakow, Poland, 22 June 2009; ACM: New York, NY, USA, 2009; pp. 319–332. [Google Scholar]
- Zhu, T.; Zhong, Z.; He, T.; Zhang, Z.L. Energy-synchronized computing for sustainable sensor networks. Ad Hoc Netw. 2013, 11, 1392–1404. [Google Scholar] [CrossRef]
- Alneyadi, F.; Alkaabi, M.; Alketbi, S.; Hajraf, S.; Ramzan, R. 2.4 GHz WLAN RF energy harvester for passive indoor sensor nodes. In Proceedings of the 2014 IEEE International Conference on Semiconductor Electronics (ICSE2014), Kuala Lumpur, Malaysia, 27–29 August 2014; pp. 471–474. [Google Scholar]
- Le, G.T.; Tran, T.V.; Lee, H.S.; Chung, W.Y. Long-range battery-less RF sensor for monitoring the freshness of packaged vegetables. Sens. Actuators A Phys. 2016, 237, 20–28. [Google Scholar] [CrossRef]
- Ajmal, T.; Dyo, V.; Allen, B.; Ivanov, I. Design and optimisation of compact RF energy harvesting device for smart applications. Electron. Lett. 2014, 50, 111–113. [Google Scholar] [CrossRef]
- Dyo, V.; Ajmal, T.; Allen, B.; Jazani, D.; Ivanov, I. Design of a ferrite rod antenna for harvesting energy from medium wave broadcast signals. J. Eng. 2013, 2013, 89–96. [Google Scholar] [CrossRef]
- Mekikis, P.V.; Antonopoulos, A.; Kartsakli, E.; Alonso, L.; Verikoukis, C. Connectivity Analysis in Wireless-Powered Sensor Networks with Battery-Less Devices. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| area | 3000 m × 3000 m |
| avg speed | 1.38 m/s ± 0.28 m/s |
| rest time, home station | 600 s |
| rest time, charging station | 5 s |
| leak current | 4 μA |
| sleep current | 4 μA |
| RF power output | 3 W |
| RF min distance | 1.5 m |
| 1.25 V | |
| 1.02 V |
| Hybrid Capacitor, F | 0.01 | 0.02 | 0.03 | 0.04 | 0.05 | 0.06 | 0.07 | 0.08 | 0.09 | 0.10 |
| Energy, mJ | 12.84 | 25.60 | 38.44 | 51.28 | 64.12 | 76.95 | 89.79 | 102.63 | 115.47 | 128.31 |
| Mode | Current, mA | Voltage, V | Power, mW |
|---|---|---|---|
| sleeping | 3.3 | ||
| active | 3.34 | 3.3 | 11.022 |
| transmitting | 35.587 | 3.3 | 117.44 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Munir, B.; Dyo, V. On the Impact of Mobility on Battery-Less RF Energy Harvesting System Performance. Sensors 2018, 18, 3597. https://doi.org/10.3390/s18113597
Munir B, Dyo V. On the Impact of Mobility on Battery-Less RF Energy Harvesting System Performance. Sensors. 2018; 18(11):3597. https://doi.org/10.3390/s18113597
Chicago/Turabian StyleMunir, Bilal, and Vladimir Dyo. 2018. "On the Impact of Mobility on Battery-Less RF Energy Harvesting System Performance" Sensors 18, no. 11: 3597. https://doi.org/10.3390/s18113597
APA StyleMunir, B., & Dyo, V. (2018). On the Impact of Mobility on Battery-Less RF Energy Harvesting System Performance. Sensors, 18(11), 3597. https://doi.org/10.3390/s18113597