1. Introduction
By 2050 over 70% of the world’s population will live in cities, metropolitan areas and surrounding zones. There is thus a strong interest in making our cities smarter by tackling the challenges connected to urbanization and high density population by leveraging modern Information and Communications Technologies (ICT) solutions. Indeed, progresses in communication, embedded systems and big data analysis make it possible to conceive frameworks for sustainable and efficient use of resources such as space, energy and mobility which are necessarily limited in crowded urban environments. In particular, Intelligent Transportation Systems (ITS) are envisaged to have a great role in the smart cities of tomorrow. ITS can help in making the most profitable use of existing road networks (which are not always further expandable to a large extent) as well as public and private transport by optimizing scheduling and fostering multi-modal travelling. One enlightening example of the role of ITS is represented by the seemingly trivial parking problem: it has been shown that a share of the total traffic of 10% (with peaks up to 73% [
1]) is represented by cars cruising for parking spaces; such cars constrain urban mobility not only in the nearby vicinity of usual parking zones, but also in geographically distant areas, which are affected by congestion back-propagation. Indeed, the cruising-for-park issue is a complex problem which cannot be solely ascribed to parking shortage, but is also connected to fee policies for off-street and curb parking and to the mobility patterns through the city in different periods and days of the week. Indeed, cheap curb parking fees usually foster cruising, with deep impacts on global circulation, including longer time for parking, longer distances and a waste of fuel, resulting thus in incremented emissions of greenhouse gas. As such, the problem cannot be statically modeled since it has clearly a spatio-temporal component [
2], whose description can be classically obtained only through detailed data acquisition assisted by manual observers which—being expensive—cannot be routinely performed. Nowadays, however, ITS solutions in combination with the pervasive sensing capabilities provided by Wireless Sensor Networks (WSN) can help in tackling the cruising-for-parking problem: indeed by the use of WSN it is possible to build a neat spatio-temporal description of urban mobility that can be used for guiding drivers to free spaces and for proposing adaptive policies for parking access and pricing [
3].
More generally, pervasive sensing and ubiquitous computing can be used to create a large-scale, platform-independent infrastructure providing real-time pertinent traffic information that can be transformed into usable knowledge for a more efficient city thanks to advanced data management and analytics [
4]. A key aspect for the success of these modern platforms is the access to high quality, high informative and reliable sensing technologies that—at the same time—should be sustainable for massive adoption in smart cities. Among possible technologies, probably imaging and intelligent video analytics have a great potential which has not yet been fully unveiled and that is expected to grow [
5]. Indeed, imaging sensors can capture detailed and disparate aspects of the city and, notably, traffic related information. Thanks to the adaptability of computer vision algorithms, the image data acquired by imaging sensors can be transformed into information-rich descriptions of objects and events taking place in the city. In the past years, the large scale use of imaging technologies was prevented by inherent scalability issues. Indeed, video streams had to be transmitted to servers and therein processed to extract relevant information in an automatic way. Nevertheless, nowadays, from an Internet of Things (IoT) perspective it is possible to conceive embedded vision nodes having on-board suitable logics for video processing and understanding. Such recent ideas have been exploited in cooperative visual sensor networks, an active research field that extends the well-known sensor network domain taking into account sensor nodes enabled with vision capabilities. However, cooperation can be meant at different levels. For instance in [
6] road intersection monitoring is tackled using different sensors, positioned in such a way that any event of interest can always be observed by at least one sensor. Cooperation is then obtained by fusing the different interpretation of the sensors to build a sort of bird’s eye view of the intersection. Instead in [
7] cooperation among nodes is obtained by offloading computational tasks connected to image feature computation from one node to another. With respect to these previous works, one of the main contributions of this paper is the definition and validation of a self-powered cooperative visual sensor network designed for acting as a pervasive roadside wireless monitoring network to be installed in the urban scenario to support the creation of effective Smart Cities. Such an ad hoc sensor network was born in the framework of the Intelligent Cooperative Sensing for Improved traffic efficiency (ICSI) project [
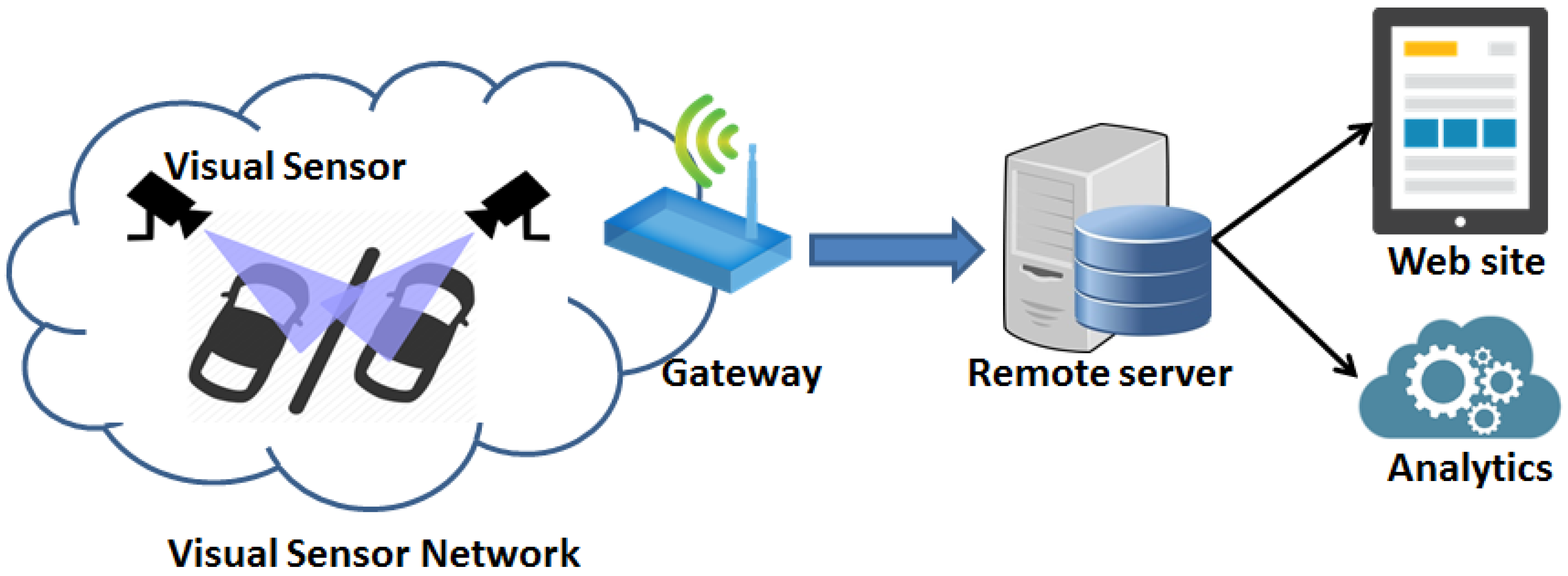
8], which aimed at providing a platform for the deployment of cooperative systems, based on vehicular network and cooperative visual sensor network communication technologies, with the goal of enabling a safer and more efficient mobility in both urban and highway scenarios, fully in line with ETSI Collaborative ITS (C-ITS). In this direction, and following the ICSI vision, the proposed cooperative visual sensor network is organized as an IoT-compliant wireless network in which images can be captured by embedded cameras to extract high-level information from the scene. The cooperative visual sensor network is responsible for collecting and aggregating ITS-related events to be used to feed higher levels of the system in charge of providing advanced services to the users. More in detail, the network is composed of new custom low-cost visual sensors nodes collecting and extracting information on: (i) parking slots availability, and (ii) traffic flows. All such data can be used to provide real-time information and suggestions to drivers, optimizing their journeys through the city. Further, the first set of collected data regarding parking can be used in the Smart City domain to create advanced parking management systems, as well as to better tune the pricing policies of each parking space. The second set of data related to vehicular flows can be used for a per-hour basis analysis of the city congestion level, thus helping the design of innovative and adaptive traffic reduction strategies.
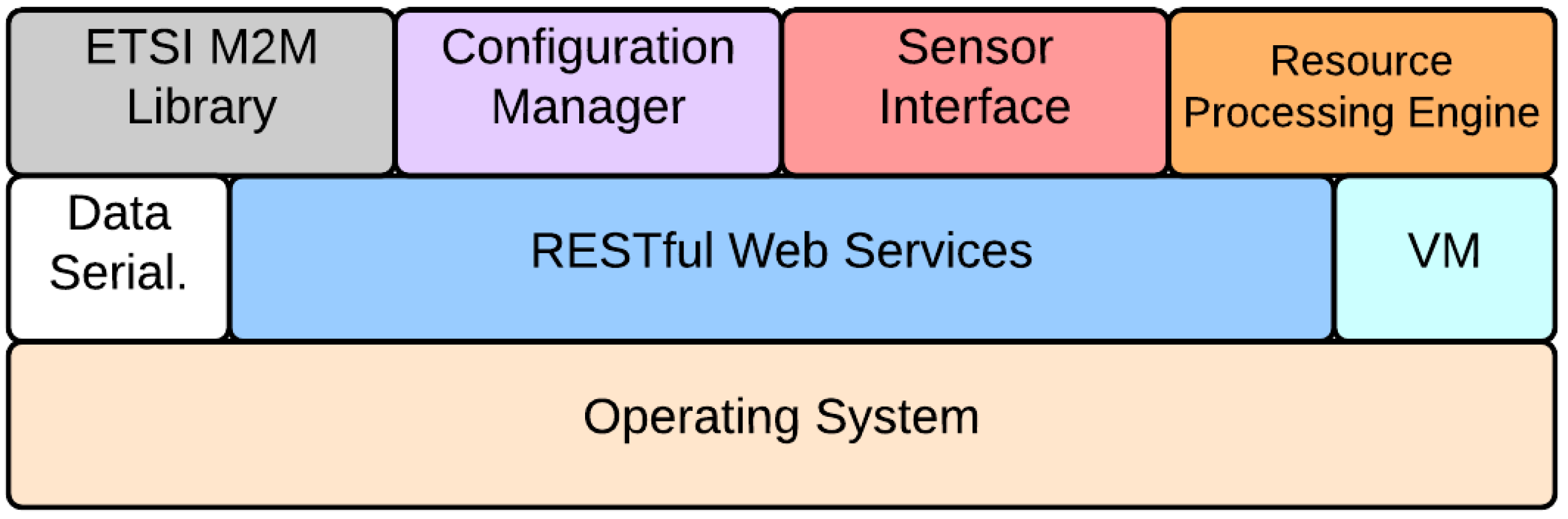
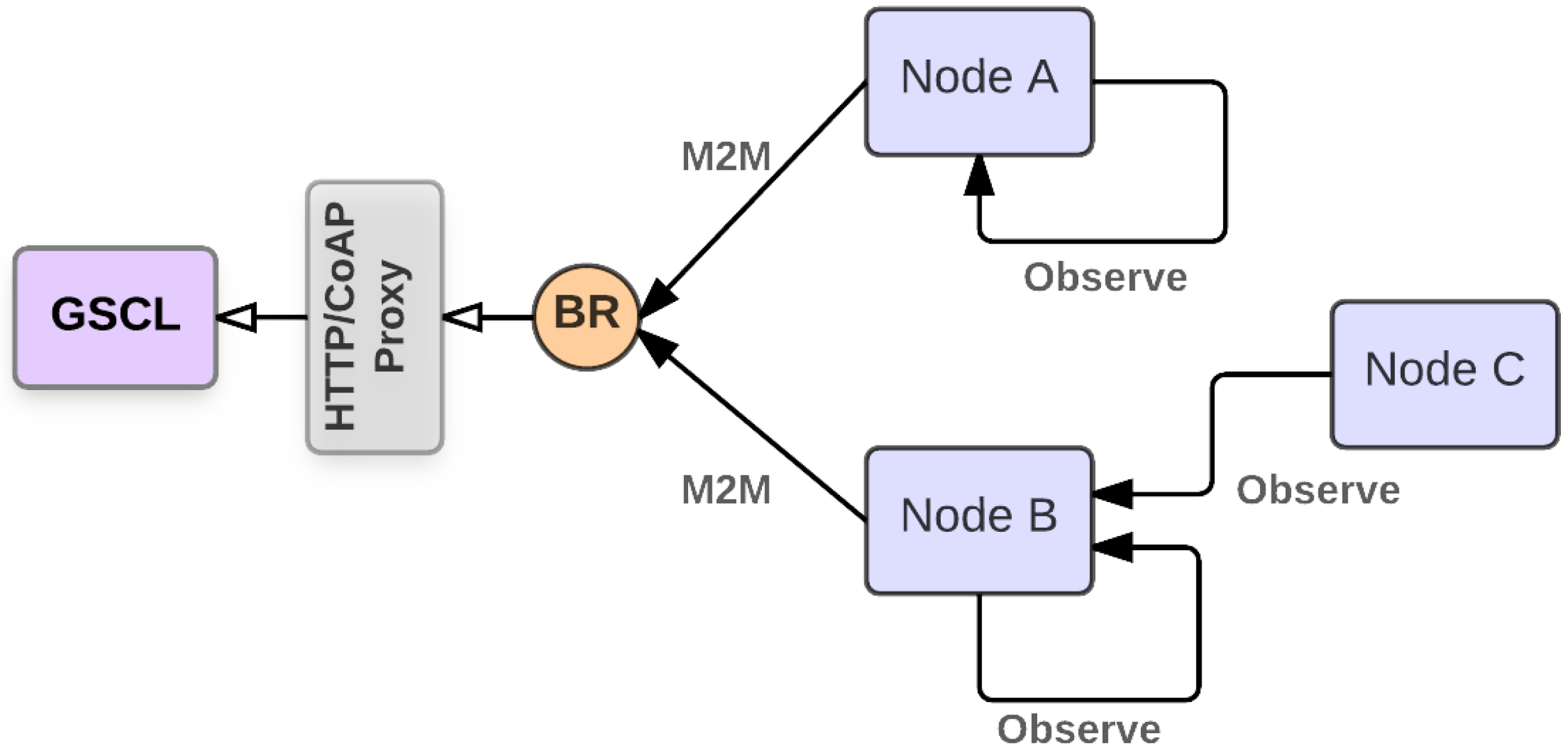
Extraction and collection of such ITS-related data is achieved thanks to the introduction of novel lightweight computer vision algorithms for flow monitoring and parking lot occupancy analysis, which represent another important contribution of this paper; indeed, the proposed methods are compared to reference algorithms available in the state of the art and are shown to have comparable performance, yet they can be executed on autonomous embedded sensors. As a further point with respect to previous works, in our proposal, cooperation is obtained by leveraging a Machine-2-Machine (M2M) middleware for resource constrained visual sensor nodes. In our contribution, the middleware has been extended to compute aggregated visual sensor node events and to publish them using M2M transactions. In this way, the belief of each single node is aggregated into a network belief which is less sensitive either to partial occlusion or to the failure of some nodes. Even more importantly, the visual sensor network (and the gain in accuracy that is possible to obtain thanks to the cooperative approach) is not only proved through simulation or limited experimentation in the lab, but is shown in a real, full-size scenario. Indeed, extensive field tests showed that the proposed solution can be actually deployed in practice, allowing for an effective, minimally invasive, fast and easy-to-configure installation, whose maintenance is sustainable, being the network nodes autonomous and self-powered thanks to integrated energy harvesting modules. In addition, during the tests, the visual sensor network was capable of gathering significant and precise data which can be exploited for supporting and implementing real-time adaptive policies as well as for reshaping city mobility plans.
The paper is organized as follows. Related works are reviewed in
Section 2, focusing both on architectural aspects and computer vision algorithms for the targeted ITS applications. In
Section 3 the main components used for building the cooperative visual sensor network are introduced and detailed, while in
Section 4, the findings of the experiments for the validation of the embedded computer vision logics (
Section 4.1) and of the IoT-compliant middleware for event composition (
Section 4.2) are reported together with the global results of field tests (
Section 4.3).
Section 5 ends the paper with ideas for future research.
2. Related Works
With the increasing number of IoTdevices and technologies, monitoring architectures have moved during the years from
cloud based approaches towards
edge solutions, and more recently to
fog approaches. The main drivers of this progressive architectural change have been the capabilities and complexities of IoT architectural elements. As the computational capacity of devices has increased, the intelligence of the system has been moved from its core (cloud-based data processing) to the border (edge-computing data analysis and aggregation), pushing further until reaching devices (fog-computing approach) to spread the whole system intelligence among all architectural elements [
9]. One of the main features of fog computing is the location awareness. Data can be processed very close to their source, thus letting a better cooperation among nodes to enhance information reliability and understanding. Visual sensor networks in the ITS domain have been envisioned during the years as an interesting solution to extract high value data. The first presented solutions were based on an edge-computing approach in which whole images or high-level extracted features were processed by high computational nodes located at the edge of the monitoring system. Works such as [
10,
11] are just an example of systems following this approach. More recent approaches leverage powerful visual sensor nodes, thus proposing solutions in which images are fully processed on-board, thus exploiting fog-computing capabilities. Following this approach, several works have been proposed in the literature by pursuing a more implementation-oriented and experimental path, works such as [
12,
13] must be cited in this line of research, and, more recently a theoretical and modeling analysis [
14]. By following a fog computing approach, the solution described in this paper proposes (i) a visual sensor network in which the logic of the system is spread among the nodes (visual sensors with image processing capabilities), and where (ii) information reliability and understanding is enhanced by nodes cooperations (cooperative middleware) exploiting location awareness properties.
As discussed in the Introduction, the proposed visual sensor network is applied to two relevant ITS problems in urban mobility, namely smart parking and traffic flow monitoring. Nowadays, besides counter-based sensors used in off-street parking, most smart parking solutions leverage two sensor categories, i.e., in situ
sensors and
camera-based sensors. The first category uses either proximity sensors based on ultrasound or inductive loop to identify the presence of a vehicle in a bay [
15,
16]. Although the performance and the reliability of the data provided by this kind of sensors are satisfactory, nevertheless installation and maintenance costs of the infrastructure have prevented massive uptake of the technology, which has been mainly used for parking guidance systems in off-street scenarios. Camera-based sensors are based on the processing of videos streams captured by imaging sensors thanks to the use of computer vision methods. In [
17] two possible strategies to tackle the problem are identified, namely the
car-driven and the
space-driven approaches. In car-driven approaches, object detection methods, such as [
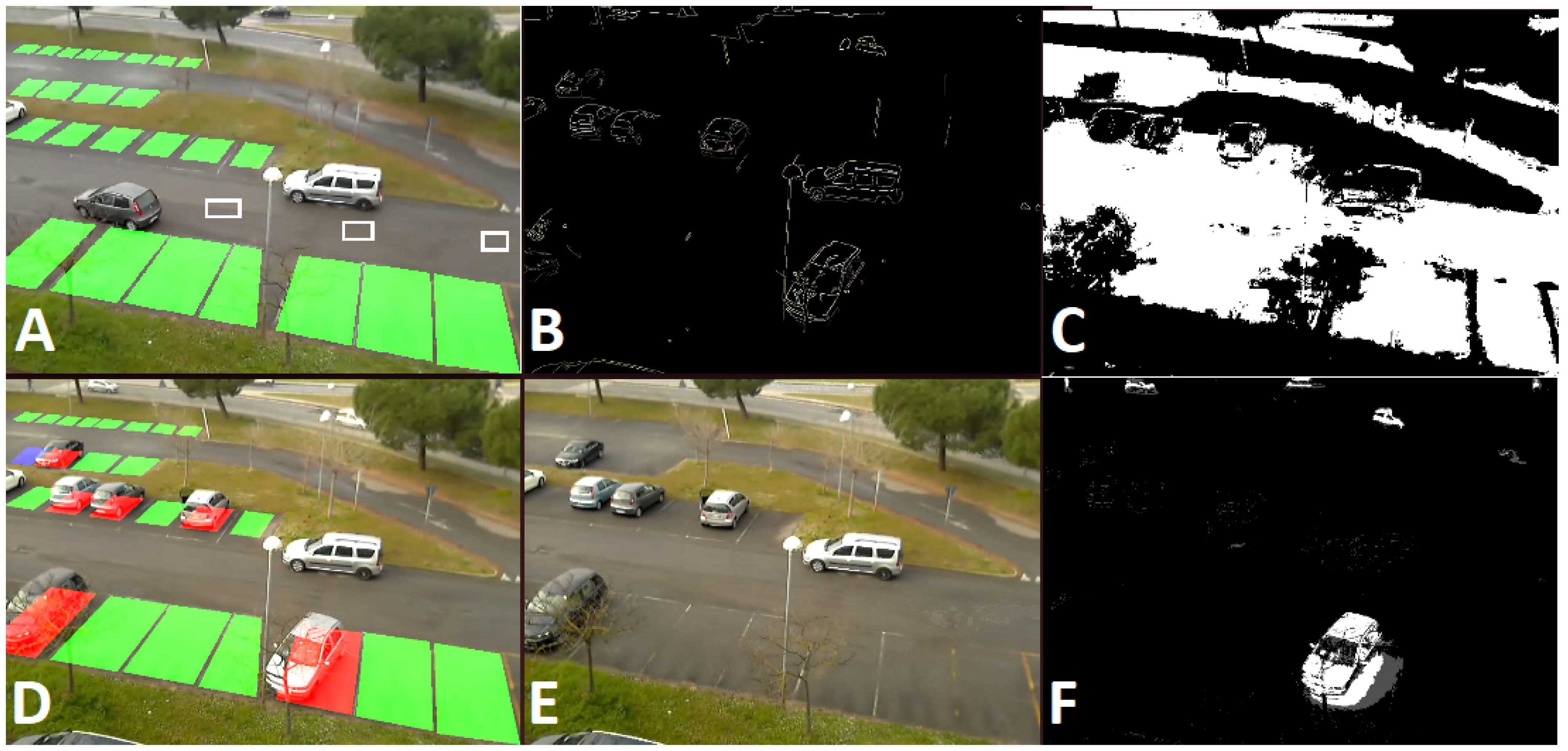
18], are employed to detect cars in the observed images, while in space-driven approaches the aim is to asses the occupancy status of a set of predefined parking spaces imaged by the sensor. Change detection is often based on background subtraction [
19]. For outdoor applications, background cannot be static but it should be modeled dynamically, to cope with issues such as illumination changes, shadows and weather conditions. To this end, methods based on Gaussian Mixture Models (GMM) [
20] or codebooks [
21] have been reported. Other approaches are based on machine learning, in which feature extraction is followed by a classifier for assessing occupancy status. For instance, in [
22], Gabor filters are used for extracting features; then, a training dataset containing images with different light conditions is used to achieve a more robust classification. More recently, approaches based on textural descriptors such as Local Binary Patterns (LPB) [
23] and Local Phase Quantization (LPQ) [
24] have appeared. In [
25], which can be considered as the state of the art, Support Vector Machines (SVM) [
26] are used to classify parking space status on the basis of LPB and LPQ features and an extensive performance analysis is reported. Deep learning methods have also been recently applied to the parking monitoring problem [
27]. All the previously described methods are based on the installation of a fixed camera infrastructure. Following the trends in connected and intelligent vehicles, however, it is possible to envisage novel solutions to the parking lot monitoring problem. For instance, in [
28], an approach based on edge computing is proposed in which each vehicle is endowed with a camera sensor capable of detecting cars in its field of view by using a cascade of classifiers. Detections are then corrected for perspective skew and, finally, parked cars are identified locally by each vehicle. Single perceptions are then shared through the network in order to build a precise global map of free and busy parking spaces. A current drawback is that the method can provide significant results and a satisfactory coverage of the city only if it is adopted by a sufficient number of vehicles. Similarly, several methods based on crowd-sourcing [
29] have been reported in the literature, most of which rely on location services provided by smart-phones for detecting arrivals and departures of drivers by leveraging activity recognition algorithms [
30,
31].
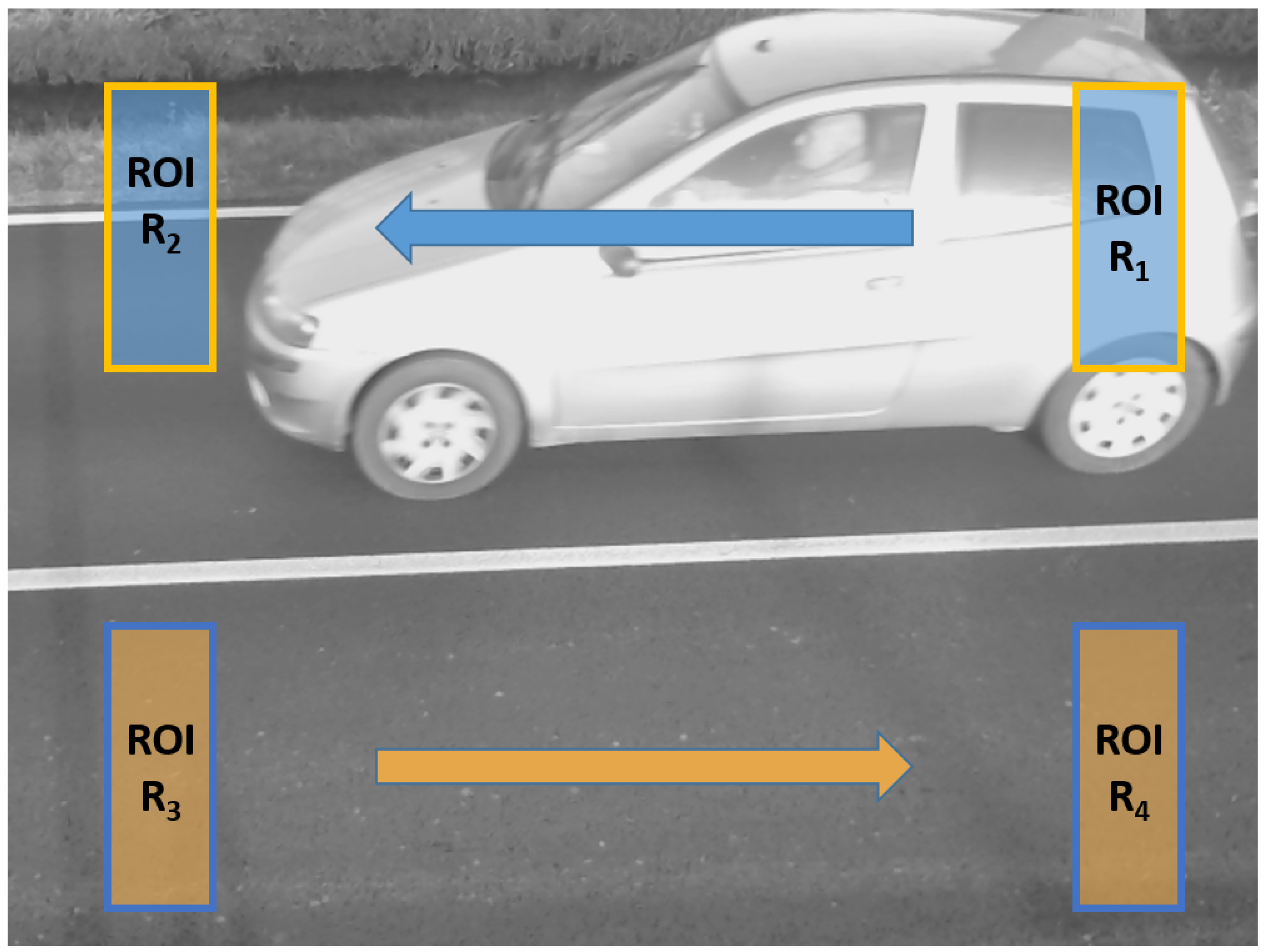
For what regards traffic flow monitoring, the problem has received great attention from the computer vision community [
32], even for the specific case of urban scenario [
33]. Nevertheless most of the existing methods use classical computer vision pipelines that are based on background subtraction followed either by tracking of the identified blobs or of the detected vehicles (see, e.g., [
34]). Such approaches are too demanding in terms of computational resources for deployment on embedded sensors.
Among the various approaches and algorithms used, only few of them are for a real-time on site processing: among them, Messelodi et al. in [
35] perform a robust background updating for detecting and tracking moving objects on a road plane, identifying different classes of vehicles. Their hardware is not reported, but in any case the heavy tracking algorithm let understand that it cannot be an embedded and autonomous platform. A similar approach is reported in [
36] where the tracking is based on Optical-Flow-Field estimation following an automatic initialization (i.e., localization), but the final goal is more related to a 3-D tracking and tests were performed on a laboratory PC. Another feature-based algorithm for detection of vehicles at intersection is presented in [
37], but again the used hardware is not reported, and the tests seem to be performed only on lab machines. An interesting embedded real-time system is shown in [
38], for detecting and tracking moving vehicles in nighttime traffic scenes. In this case, they use a DSP-based embedded platform operating at 600 MHz with 32 MB of DRAM, their results on nighttime detection are very good, but yet their approach did not have to cope with low-energy constraints. In [
39], the real-time classification of multiple vehicles, also performing a tracking based on Kalman filtering, is performed using commercially available PCs, yet results are around
. Lai et al. [
40] propose a robust background subtraction model facing lighting changes problems with slowly moving objects in an
acceptable processing time. However, the used hardware is not described and the final acceptable processing frame rate is around 2.5 fps, which is not acceptable for a normal traffic condition. The same problem arises in [
41], where they perform real-time vision with so-called
autonomous tracking units, which are defined as powerful processing units. Their test-bed are parking (in particular airport parkings) with slow moving vehicles and their final processing rate is again very low i.e., below 5 fps. Finally, in [
42] the algorithm based on Support Vector is not used in real-time condition and, even if the processing times and the hardware are not reported, it must be a powerful unit, yet obtaining around
accuracy.


 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}