Full-Body Locomotion Reconstruction of Virtual Characters Using a Single Inertial Measurement Unit


Abstract
:1. Introduction
2. Related Work
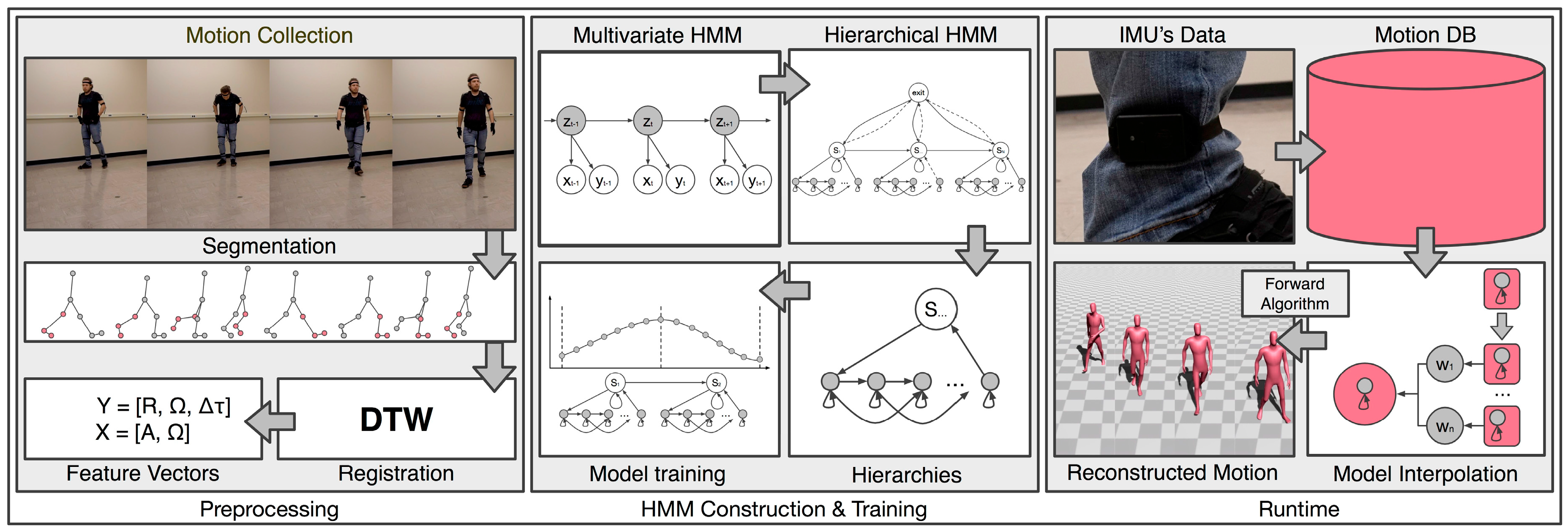
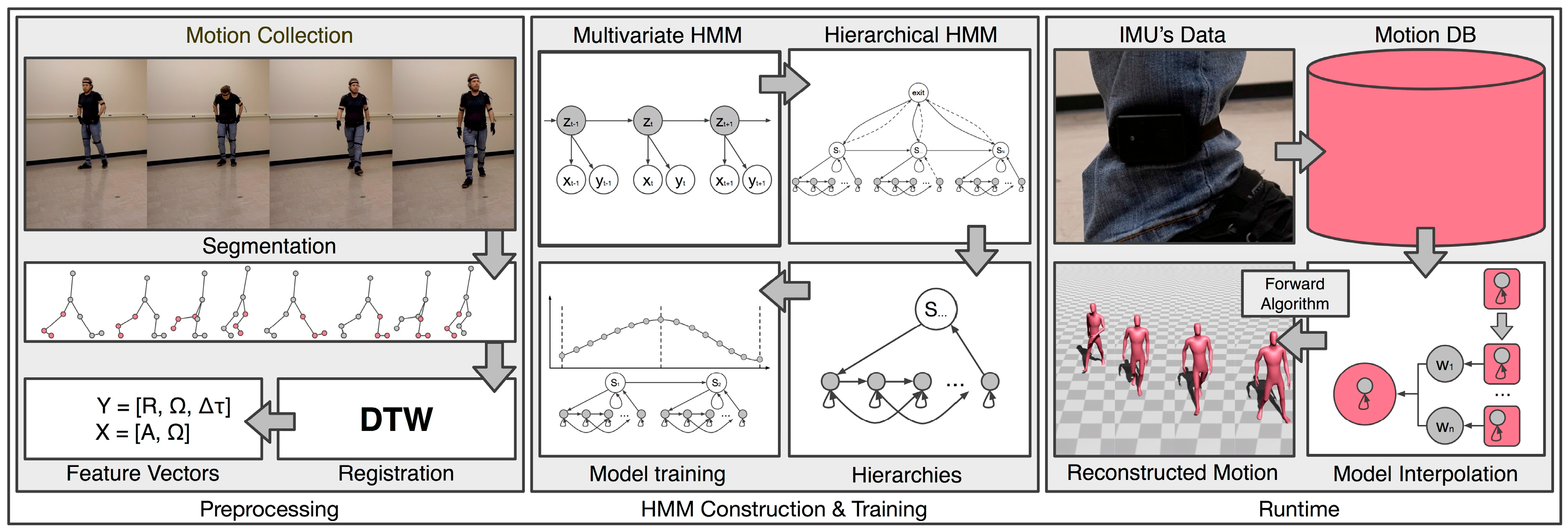
3. Methodology
4. Preprocessing
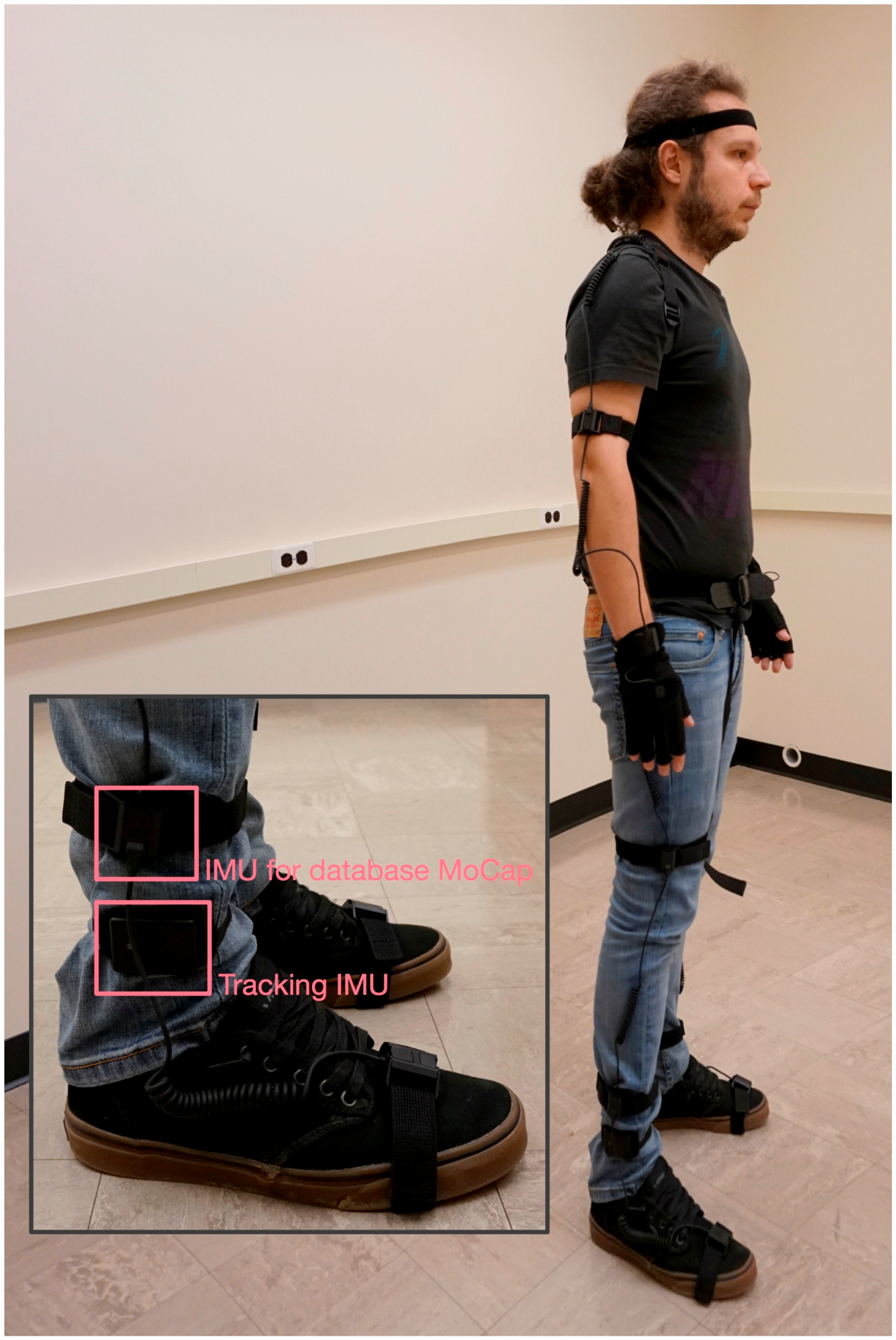
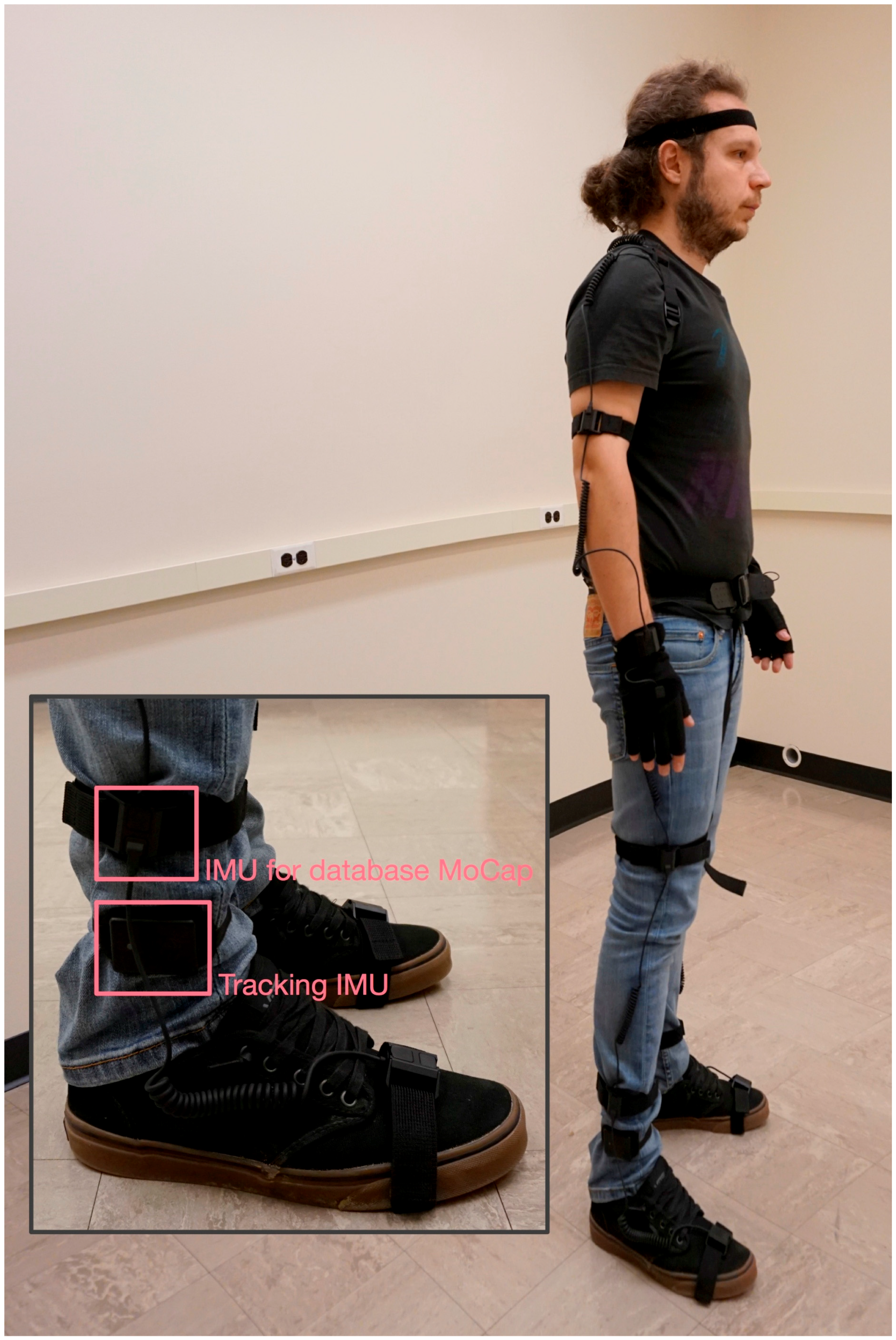
4.1. Capturing Motion Data
4.2. Motion Segmentation
4.3. Full-Body and IMU Data Registration
4.4. Motion Features
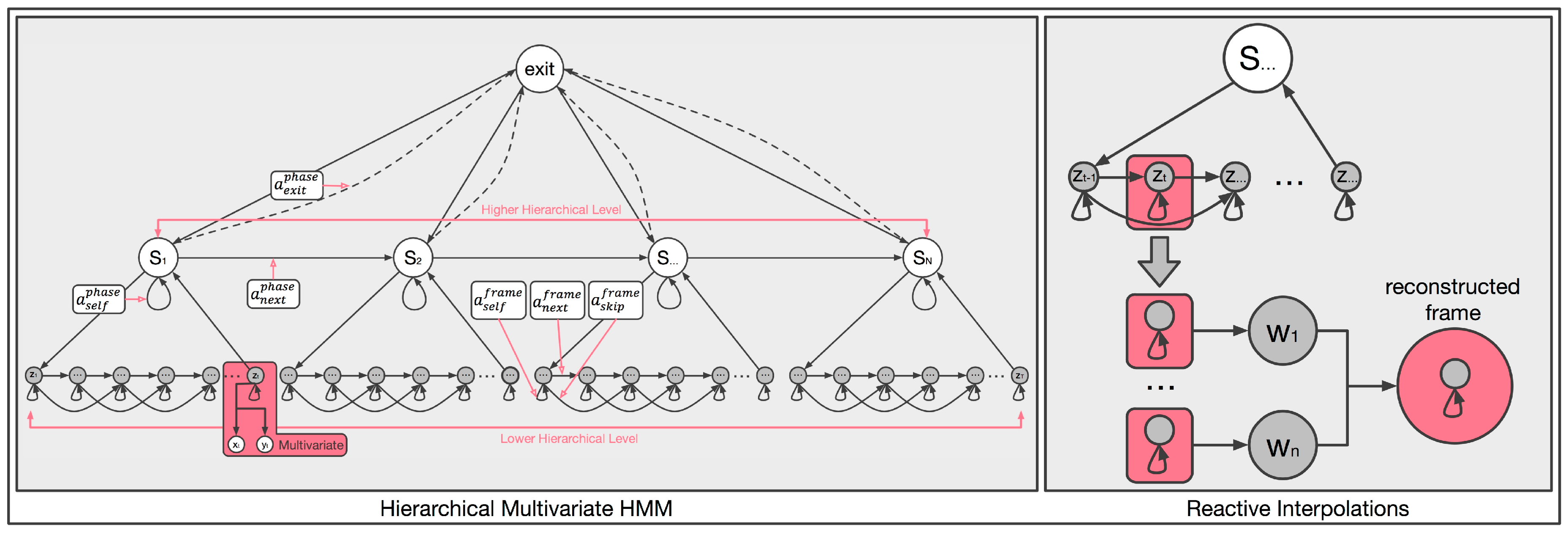
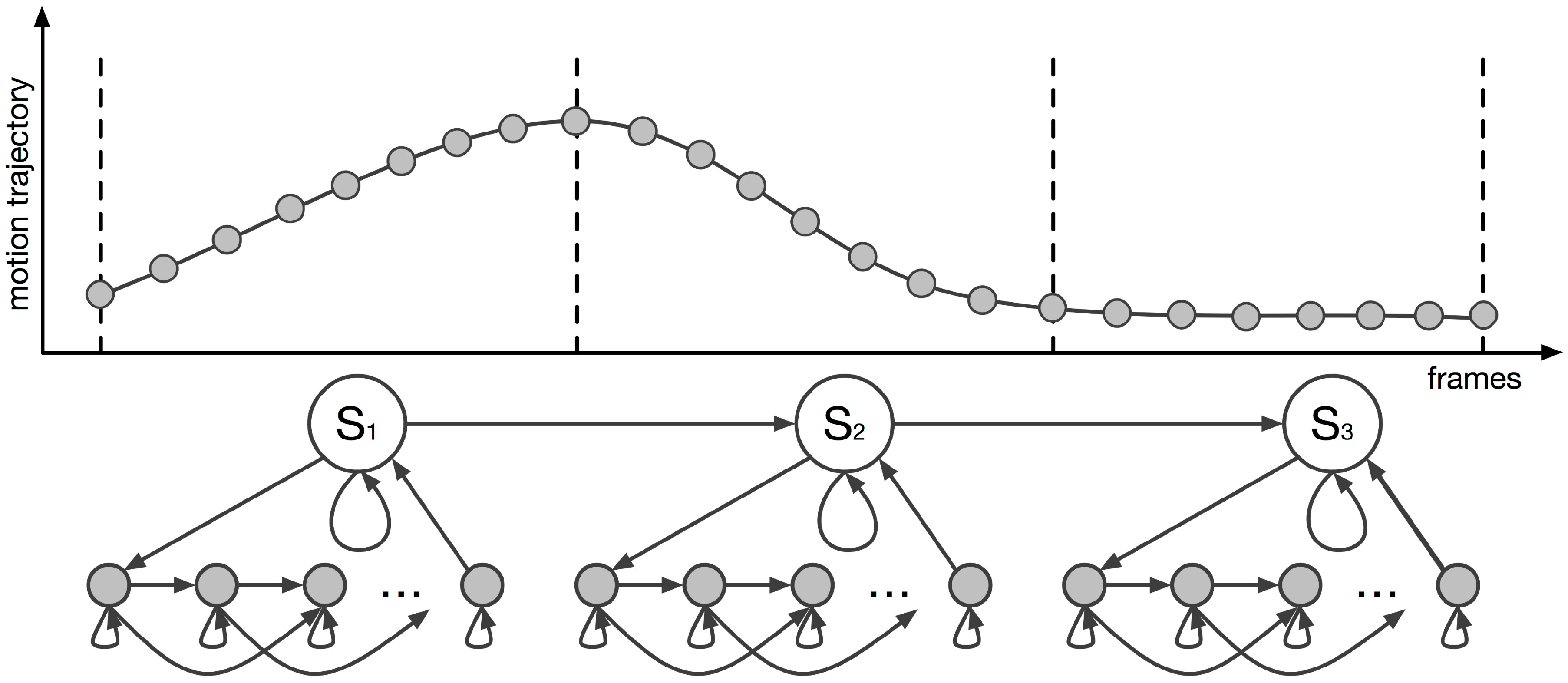
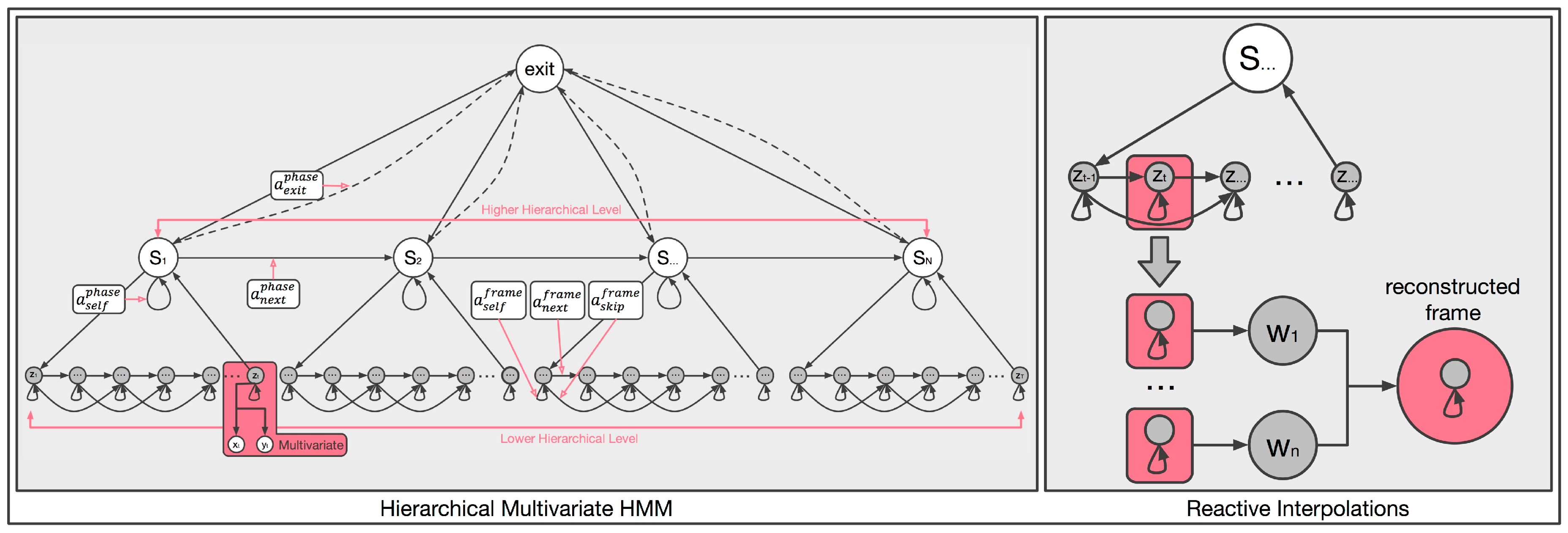
5. Hierarchical Multivariate HMM with Reactive Interpolations
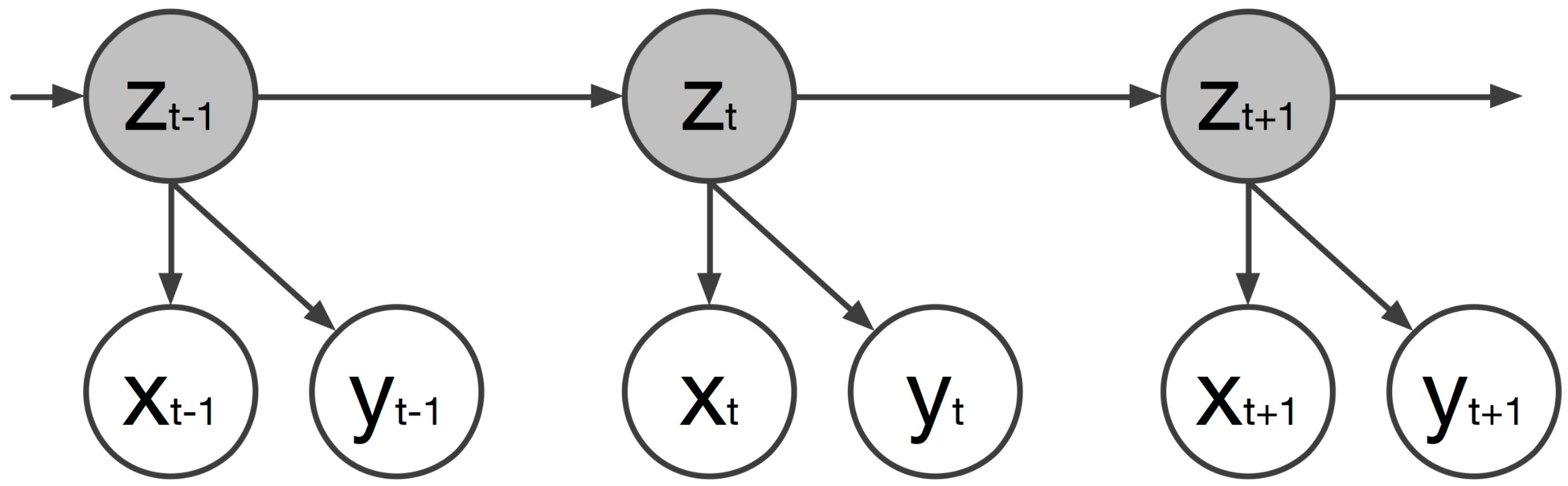
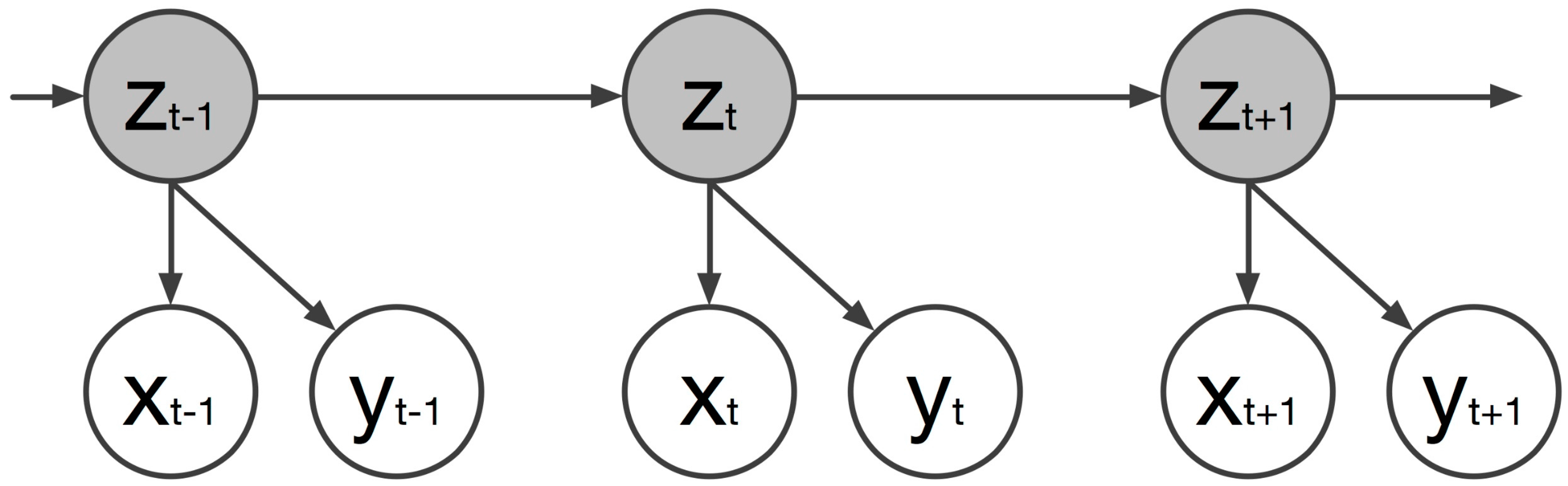
5.1. Multivariate HMM Mapping
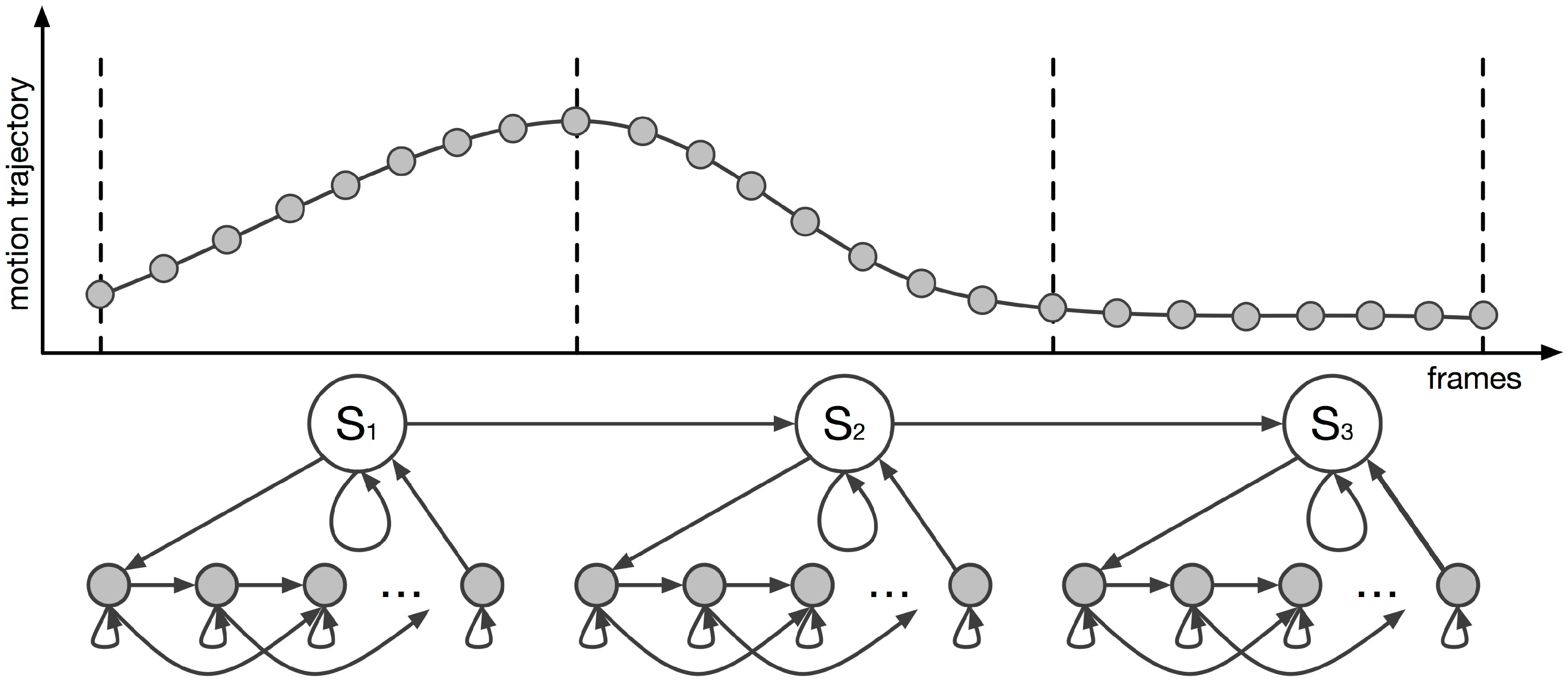
5.2. Hierarchical HMM
Training Process
- self-transition: ,
- next transition: , and
- exit transition: .
- self-transition: ,
- next transition: , and
- skip transition: .
5.3. Reactive Model Interpolation
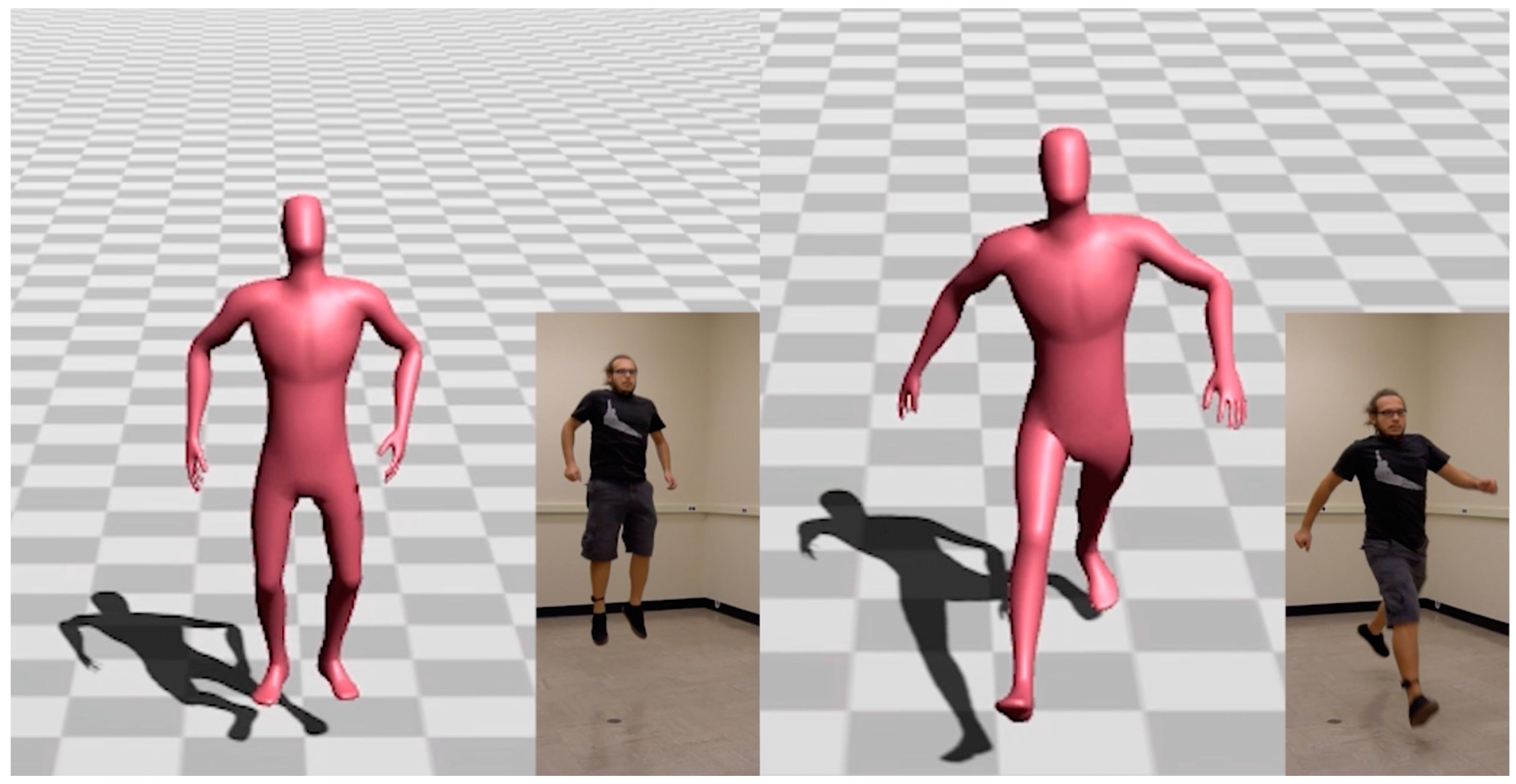
6. Full-Body Locomotion Reconstruction
7. Implementation Details and Evaluations
7.1. Implementation
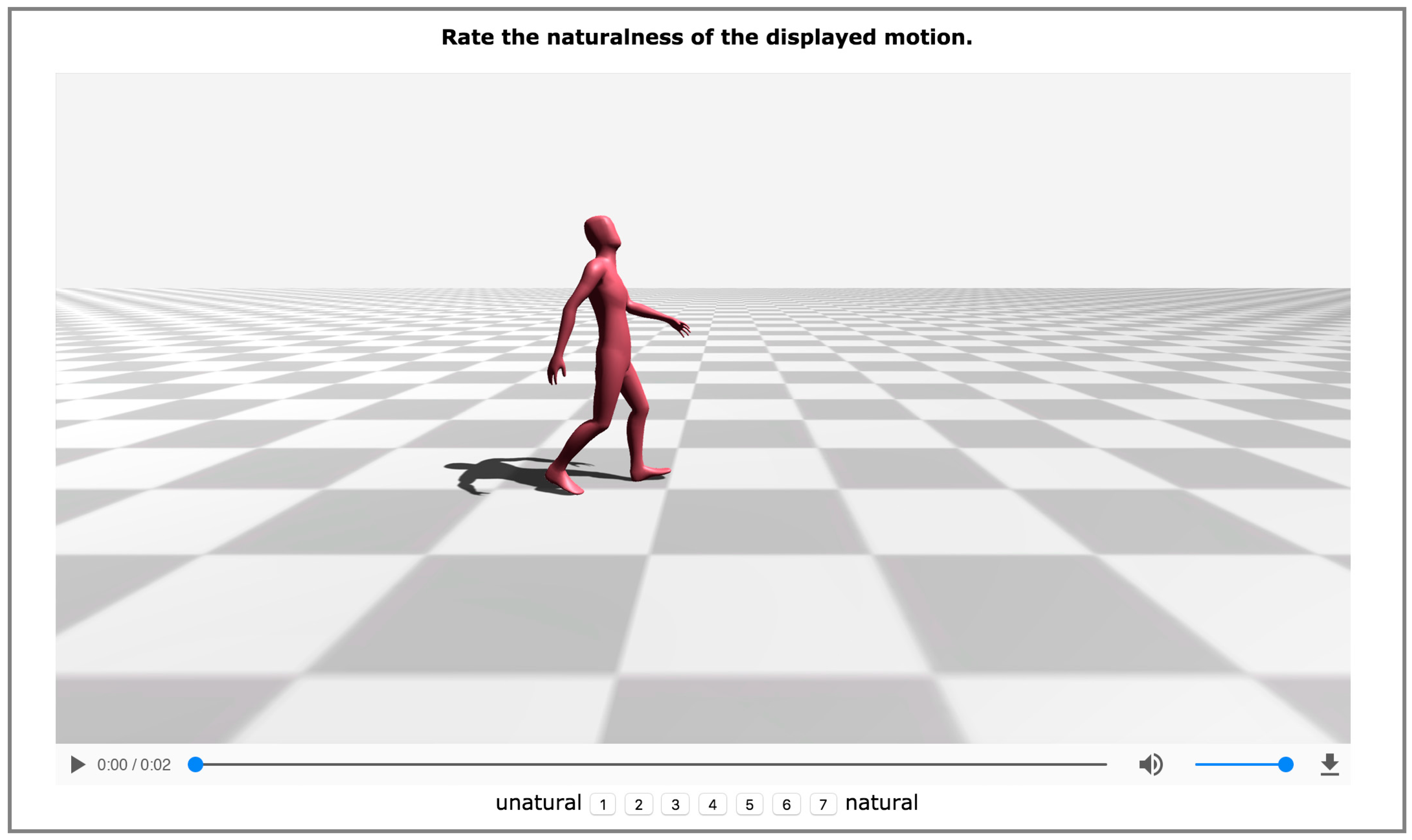
7.2. Evaluations
7.2.1. Framerate
7.2.2. Evaluating IMU Positioning
7.2.3. Reconstruction Evaluation Against Previous Approaches
7.2.4. Evaluating Transition Between Motion Segments
8. Conclusions
Supplementary Materials
Conflicts of Interest
Appendix A. The Forward Procedure
References
- Liu, H.; Wei, X.; Chai, J.; Ha, I.; Rhee, T. Realtime human motion control with a small number of inertial sensors. In Proceedings of the ACM SIGGRAPH Symposium on Interactive 3D Graphics and Games, San Francisco, CA, USA, 18–20 February 2011; ACM: New York, NY, USA, 2011; pp. 133–140. [Google Scholar]
- Von Marcard, T.; Rosenhahn, B.; Black, M.J.; Pons-Moll, G. Sparse inertial poser: Automatic 3D human pose estimation from sparse IMUs. Comput. Graph. Forum 2017, 36, 349–360. [Google Scholar] [CrossRef]
- Eom, H.; Choi, B.; Noh, J. Data-Driven Reconstruction of Human Locomotion Using a Single Smartphone. Comput. Graph. Forum 2014, 33, 11–19. [Google Scholar] [CrossRef]
- Mousas, C.; Anagnostopoulos, C.N. Real-time performance-driven finger motion synthesis. Comput. Graph. 2017, 65, 1–11. [Google Scholar] [CrossRef]
- Maiocchi, R. 3-D Character Animation Using Motion Capture; Prentice-Hall: Upper Saddle River, NJ, USA, 1996. [Google Scholar]
- Roetenberg, D.; Luinge, H.; Slycke, P. Xsens mvn: Full 6dof Human Motion Tracking Using Miniature Inertial Sensors; Xsens Motion Technologies BV: Enschede, The Netherlands, 2009. [Google Scholar]
- Xia, S.; Gao, L.; Lai, Y.K.; Yuan, M.Z.; Chai, J. A survey on human performance capture and animation. J. Comput. Sci. Technol. 2017, 32, 536–554. [Google Scholar] [CrossRef]
- Shin, H.J.; Lee, J.; Shin, S.Y.; Gleicher, M. Computer puppetry: An importance-based approach. ACM Trans. Graph. 2001, 20, 67–94. [Google Scholar] [CrossRef]
- Sturman, D.J. Computer puppetry. Comput. Graph. Appl. 1998, 18, 38–45. [Google Scholar] [CrossRef]
- Raunhardt, D.; Boulic, R. Immersive singularity-free full-body interactions with reduced marker set. Comput. Animat. Virtual Worlds 2011, 22, 407–419. [Google Scholar] [CrossRef]
- Unzueta, L.; Peinado, M.; Boulic, R.; Suescun, Á. Full-body performance animation with sequential inverse kinematics. Graph. Models 2008, 70, 87–104. [Google Scholar] [CrossRef]
- Bleiweiss, A.; Eshar, D.; Kutliroff, G.; Lerner, A.; Oshrat, Y.; Yanai, Y. Enhanced interactive gaming by blending full-body tracking and gesture animation. In Proceedings of the ACM Siggerph Asia Sketches, Seoul, Korea, 15–18 December 2010; ACM: New York, NY, USA, 2010; p. 34. [Google Scholar]
- Slyper, R.; Hodgins, J.K. Action capture with accelerometers. In Proceedings of the ACM SIGGRAPH/Eurographics Symposium on Computer Animation, Dublin, UK, 7–9 July 2008; Eurographics Association: Aire-la-Ville, Switzerland, 2008; pp. 193–199. [Google Scholar]
- Numaguchi, N.; Nakazawa, A.; Shiratori, T.; Hodgins, J.K. A puppet interface for retrieval of motion capture data. In Proceedings of the ACM SIGGRAPH/Eurographics Symposium on Computer Animation, Vancouver, BC, Canada, 5–7 August 2011; Eurographics Association: Aire-la-Ville, Switzerland, 2011; pp. 157–166. [Google Scholar]
- Yin, K.; Pai, D.K. Footsee: An interactive animation system. In Proceedings of the ACM SIGGRAPH/Eurographics Symposium on Computer Animation, San Diego, CA, USA, 26–27 July 2003; Eurographics Association: Aire-la-Ville, Switzerland, 2003; pp. 329–338. [Google Scholar]
- Misumi, H.; Fujimura, W.; Kosaka, T.; Hattori, M.; Shirai, A. GAMIC: Exaggerated real time character animation control method for full-body gesture interaction systems. In Proceedings of the ACM Siggeraph Posters, Vancouver, BC, Canada, 7–11 August 2011; p. 5. [Google Scholar]
- Mousas, C.; Anagnostopoulos, C.N. Performance-Driven Hybrid Full-Body Character Control for Navigation and Interaction in Virtual Environments. 3D Res. 2017, 8, 18. [Google Scholar] [CrossRef]
- Tautges, J.; Zinke, A.; Krüger, B.; Baumann, J.; Weber, A.; Helten, T.; Müller, M.; Seidel, H.P.; Eberhardt, B. Motion reconstruction using sparse accelerometer data. ACM Trans. Graph. 2011, 30, 18. [Google Scholar] [CrossRef]
- Mousas, C.; Newbury, P.; Anagnostopoulos, C.N. Data-Driven Motion Reconstruction Using Local Regression Models. In Artificial Intelligence Applications and Innovations; Springer: Berlin/Heidelberg, Germany, 2014; pp. 364–374. [Google Scholar]
- Mousas, C.; Newbury, P.; Anagnostopoulos, C.N. Evaluating the Covariance Matrix Constraints for Data-Driven Statistical Human Motion Reconstruction. In Proceedings of the 30th Spring Conference on Computer Graphics, Smolenice, Slovakia, 28–30 May 2014; pp. 99–106. [Google Scholar]
- Mousas, C.; Newbury, P.; Anagnostopoulos, C.N. Efficient hand-over motion reconstruction. In Proceedings of the International Conference on Computer Graphics, Visualization and Computer Vision, Plzen, Czech Republic, 2–5 June 2014; pp. 111–120. [Google Scholar]
- Shiratori, T.; Hodgins, J.K. Accelerometer-based user interfaces for the control of a physically simulated character. ACM Trans. Graph. 2008, 27, 123. [Google Scholar] [CrossRef]
- Wei, X.; Zhang, P.; Chai, J. Accurate realtime full-body motion capture using a single depth camera. ACM Trans. Graph. 2012, 31, 188. [Google Scholar] [CrossRef]
- Shiratori, T.; Park, H.S.; Sigal, L.; Sheikh, Y.; Hodgins, J.K. Motion capture from body-mounted cameras. ACM Trans. Graph. 2011, 30, 31. [Google Scholar] [CrossRef]
- Min, J.; Chai, J. Motion graphs++: A compact generative model for semantic motion analysis and synthesis. ACM Trans. Graph. 2012, 31, 153. [Google Scholar] [CrossRef]
- Li, Y.; Wang, T.; Shum, H.Y. Motion texture: A two-level statistical model for character motion synthesis. ACM Trans. Graph. 2002, 21, 465–472. [Google Scholar] [CrossRef]
- Badler, N.I.; Hollick, M.J.; Granieri, J.P. Real-time control of a virtual human using minimal sensors. Presence Teleoper. Virtual Environ. 1993, 2, 82–86. [Google Scholar] [CrossRef]
- Semwal, S.K.; Hightower, R.; Stansfield, S. Mapping algorithms for real-time control of an avatar using eight sensors. Presence Teleoper. Virtual Environ. 1998, 7, 1–21. [Google Scholar] [CrossRef]
- Chai, J.; Hodgins, J.K. Performance animation from low-dimensional control signals. ACM Trans. Graph. 2005, 24, 686–696. [Google Scholar] [CrossRef]
- Pons-Moll, G.; Baak, A.; Helten, T.; Müller, M.; Seidel, H.P.; Rosenhahn, B. Multisensor-fusion for 3d full-body human motion capture. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 663–670. [Google Scholar]
- Tautges, J.; Krüger, B.; Zinke, A.; Weber, A. Reconstruction of Human Motions Using Few Internal Sensors. In Proceedings of the Virtuelle und Erweiterte Realität: 5 Workshop der GI-Fachgruppe VR/AR, Magdeburg, Germany, September 2008; pp. 1–12. [Google Scholar]
- Oore, S.; Terzopoulos, D.; Hinton, G. A desktop input device and interface for interactive 3d character animation. In Proceedings of the Graphics Interface 2002, Calgary, AB, Canada, 27–29 May 2002; pp. 133–140. [Google Scholar]
- Ayyappa, E. Normal Human Locomotion, Part 1: Basic Concepts and Terminology. J. Prosthet. Orthot. 1997, 9, 10–17. [Google Scholar] [CrossRef]
- Marks, G.E. Manual of Artificial Limbs; AA Marks: New York, NY, USA, 1907. [Google Scholar]
- Loudon, J.K.; Swift, M.; Bell, S. The Clinical Orthopedic Assessment Guide; Human Kinetics: Champaign, IL, USA, 2008. [Google Scholar]
- Mahmudi, M.; Kallmann, M. Analyzing locomotion synthesis with feature-based motion graphs. IEEE Trans. Vis. Comput. Graph. 2013, 19, 774–786. [Google Scholar] [CrossRef] [PubMed]
- Kovar, L.; Gleicher, M. Flexible automatic motion blending with registration curves. In Proceedings of the ACM SIGGRAPH/Eurographics Symposium on Computer Animation, San Diego, CA, USA, 26–27 July 2003; Eurographics Association: Aire-la-Ville, Switzerland, 2003; pp. 214–224. [Google Scholar]
- Dugad, R.; Desai, U.B. A Tutorial on Hidden Markov Models; Technical Report SPANN-96.1; Signal Processing and Artificial Neural Networks Laboratory, Department of Electrical Engineering, Indian Institute of Technology Bombay: Maharashtra, India, 1996. [Google Scholar]
- Levine, S.; Wang, J.M.; Haraux, A.; Popović, Z.; Koltun, V. Continuous character control with low-dimensional embeddings. ACM Trans. Graph. 2012, 31, 28. [Google Scholar] [CrossRef]
- Lee, Y.; Wampler, K.; Bernstein, G.; Popović, J.; Popović, Z. Motion fields for interactive character locomotion. Commun. ACM 2014, 57, 101–108. [Google Scholar] [CrossRef]
- Yoshimura, T.; Tokuda, K.; Masuko, T.; Kobayashi, T.; Kitamura, T. Speaker interpolation in HMM-based speech synthesis system. Acoust. Sci. Technol. 1997, 21, 199–206. [Google Scholar] [CrossRef]
- Kullback, S. Information Theory and Statistics; Courier Corporation: Chicago, IL, USA, 1997. [Google Scholar]
- Yamagishi, J.; Masuko, T.; Kobayashi, T. HMM-based expressive speech synthesis—Towards TTS with arbitrary speaking styles and emotions. In Proceedings of the Special Workshop in Maui, Maui, HI, USA, 14 January 2004. [Google Scholar]
- Tachibana, M.; Yamagishi, J.; Onishi, K.; Masuko, T.; Kobayashi, T. HMM-based speech synthesis with various speaking styles using model interpolation. In Proceedings of the International Conference in Speech Prosody, Nara, Japan, 23–26 March 2004. [Google Scholar]
- Rabiner, L.R. A tutorial on hidden Markov models and selected applications in speech recognition. Proc. IEEE 1989, 77, 257–286. [Google Scholar] [CrossRef]
- Murphy, K.P.; Paskin, M.A. Linear-time inference in Hierarchical HMMs. In Proceedings of the 14th International Conference on Neural Information Processing Systems: Natural and Synthetic, Vancouver, BC, Canada, 3–8 December 2001; pp. 833–840. [Google Scholar]
- Levine, S.; Theobalt, C.; Koltun, V. Real-time prosody-driven synthesis of body language. ACM Trans. Graph. 2009, 28, 172. [Google Scholar] [CrossRef]
- Kim, M.; Hyun, K.; Kim, J.; Lee, J. Synchronized multi-character motion editing. ACM Trans. Graph. 2009, 28, 79. [Google Scholar] [CrossRef]
- NeuroMoCap. Perception Neuron. Available online: https://neuronmocap.com/ (accessed on 15 September 2017).
- YostLabs. 3-SpaceTM Wireless 2.4 GHz DSSS. Available online: https://yostlabs.com/ (accessed on 15 September 2017).
- Riaz, Q.; Tao, G.; Krüger, B.; Weber, A. Motion reconstruction using very few accelerometers and ground contacts. Graph. Models 2015, 79, 23–38. [Google Scholar] [CrossRef]
- Kovar, L.; Gleicher, M.; Pighin, F. Motion graphs. ACM Trans. Graph. 2002, 21, 473–482. [Google Scholar] [CrossRef]
- Holden, D.; Saito, J.; Komura, T. A deep learning framework for character motion synthesis and editing. ACM Trans. Graph. 2016, 35, 138. [Google Scholar] [CrossRef]
- Holden, D.; Komura, T.; Saito, J. Phase-functioned neural networks for character control. ACM Trans. Graph. 2017, 36, 42. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Phase | Start Stance Conditions | End Stance Condition |
|---|---|---|
| From IC to LR | RH & LT | RH & RT & !LT |
| From LR to MST | RH & RT & !LT | RH & RT & LCE |
| From MST to TST | RH & RT & LCE | RT & !LH & !LT |
| From TST to PSW | RT & !LH & !LT | RT & LH |
| From PSW to ISW | RT & LH | !RT & LH & LT |
| From ISW to MSW | !RT & LH & LT | RCE & LH & LT |
| From MSW to TSW | RCE & LH & LT | !RH & !RT & LT |
| From TSW to IC | !RH & !RT & LT | RH & LT |
| Motion Type | Frames | Segments | Framerate | Latency |
|---|---|---|---|---|
| W | 500 | 56 | 65 fps | 0.025 s |
| W | 1000 | 119 | 62 fps | 0.039 s |
| W | 2000 | 254 | 57 fps | 0.073 s |
| W | 4000 | 498 | 49 fps | 0.124 s |
| W-R | 5000 | 663 | 38 fps | 0.292 s |
| W-R-J-H | 10000 | 1387 | 12 fps | 0.758 s |
| Motion Type | Frames | Proposed (1 Sensor) | Proposed (2 Sensors) | Eom et al. [3] | Riaz et al. [51] | Min and Chai [25] |
|---|---|---|---|---|---|---|
| Walking | 2000 | 2.74 | 2.07 | 3.54 | 2.53 | 2.26 |
| Running | 2000 | 2.79 | 2.11 | 4.15 | 2.71 | 2.35 |
| Jumping | 1000 | 4.17 | 1.98 | 4.98 | 3.97 | 3.62 |
| Hopping | 1000 | 2.46 | 1.91 | 4.42 | 2.44 | 2.19 |
| Total Dataset | 6000 | 4.53 | 3.03 | 7.33 | 4.03 | 3.77 |
© 2017 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mousas, C. Full-Body Locomotion Reconstruction of Virtual Characters Using a Single Inertial Measurement Unit. Sensors 2017, 17, 2589. https://doi.org/10.3390/s17112589
Mousas C. Full-Body Locomotion Reconstruction of Virtual Characters Using a Single Inertial Measurement Unit. Sensors. 2017; 17(11):2589. https://doi.org/10.3390/s17112589
Chicago/Turabian StyleMousas, Christos. 2017. "Full-Body Locomotion Reconstruction of Virtual Characters Using a Single Inertial Measurement Unit" Sensors 17, no. 11: 2589. https://doi.org/10.3390/s17112589
APA StyleMousas, C. (2017). Full-Body Locomotion Reconstruction of Virtual Characters Using a Single Inertial Measurement Unit. Sensors, 17(11), 2589. https://doi.org/10.3390/s17112589