
PSO-SVM-Based Online Locomotion Mode Identification for Rehabilitation Robotic Exoskeletons

 ,
,
Abstract
:1. Introduction
2. Data Collection and Processing
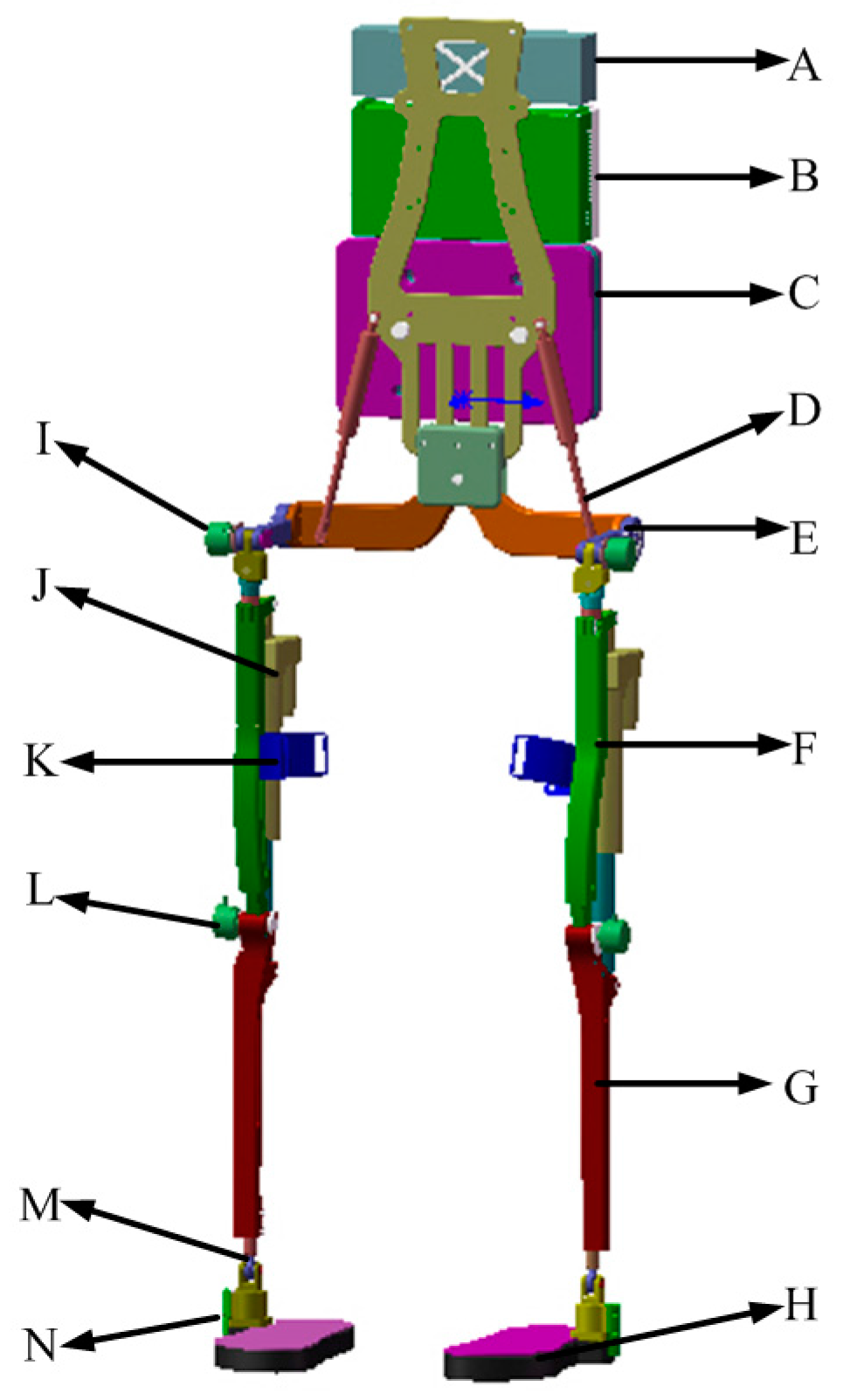
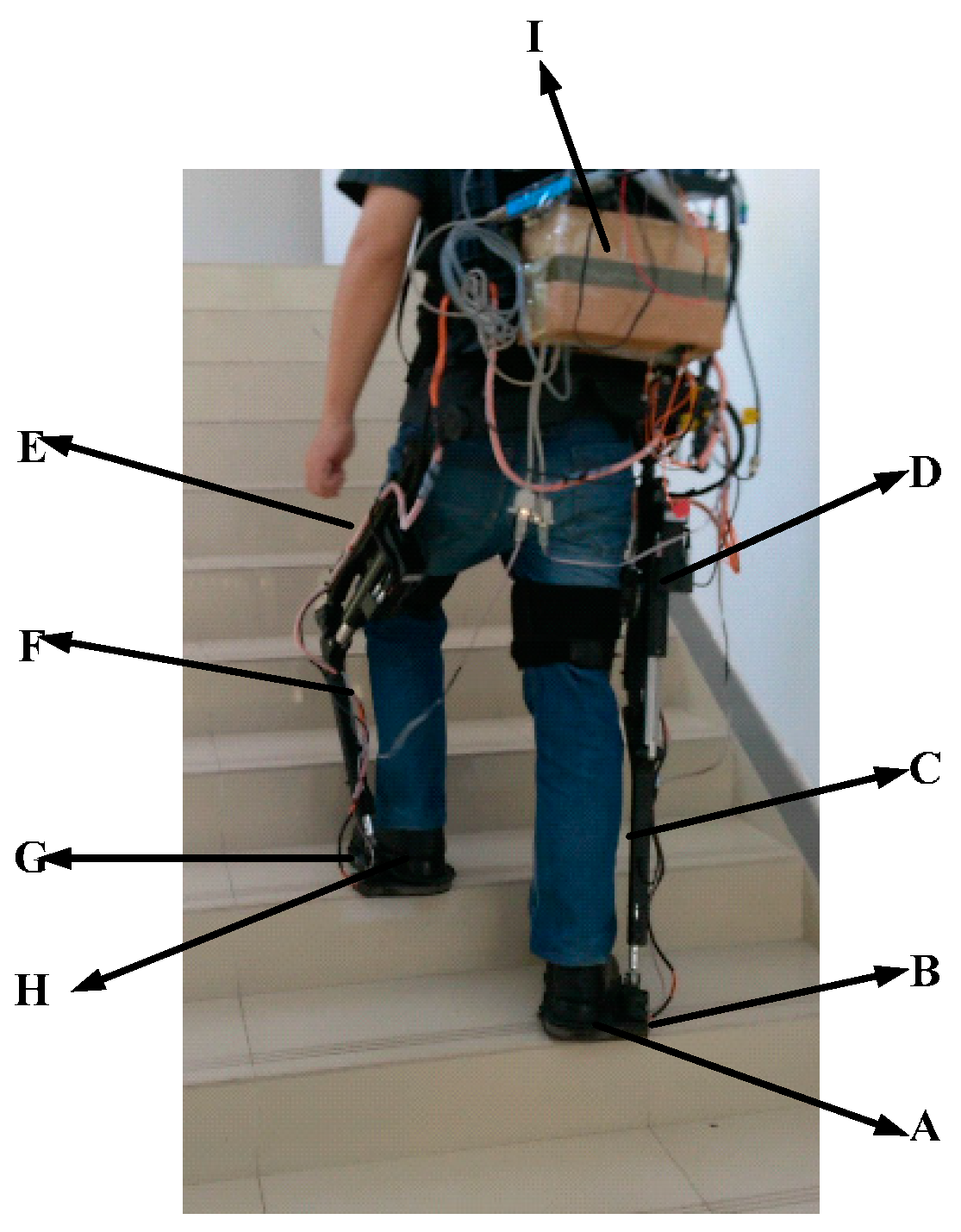
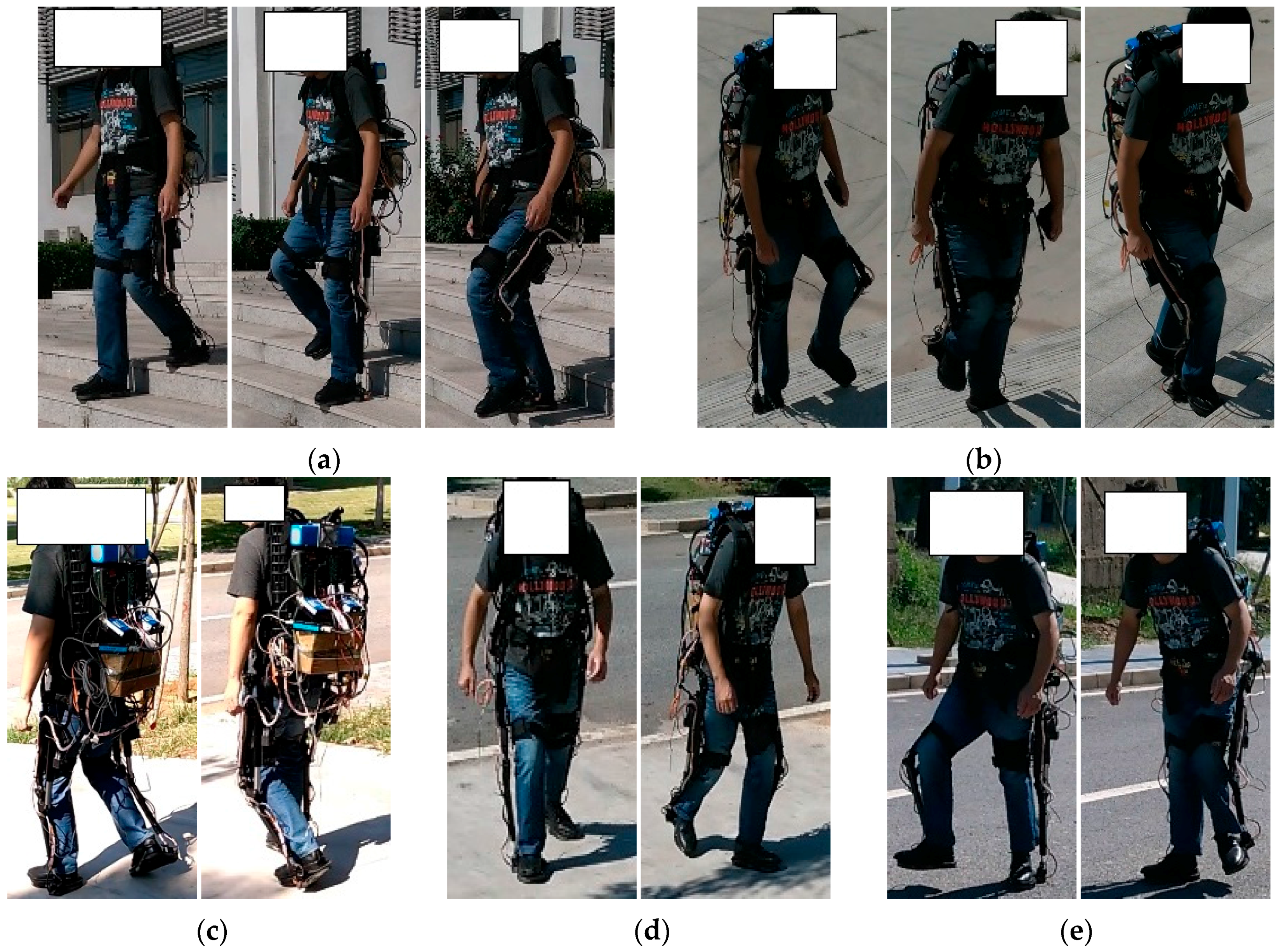
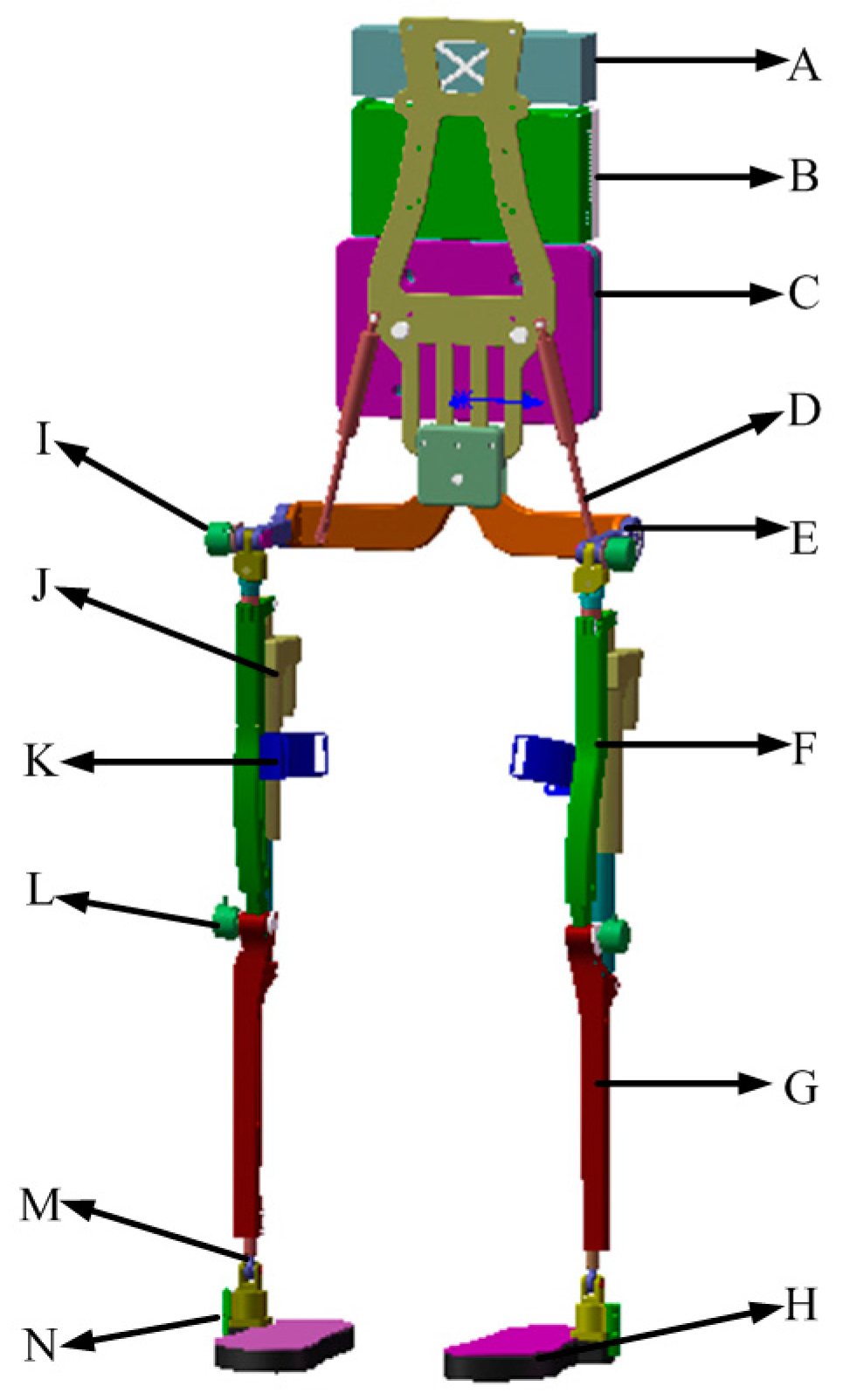
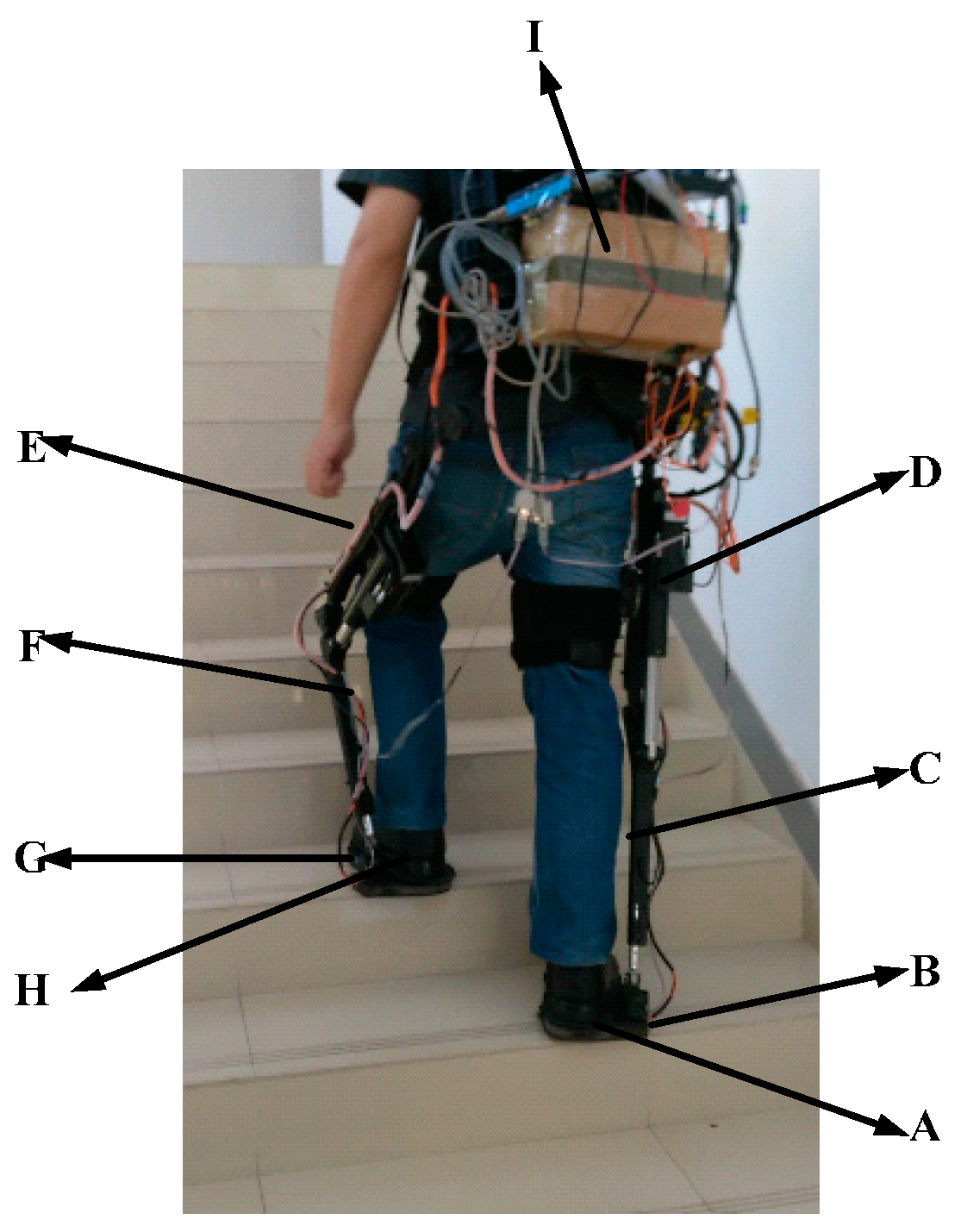
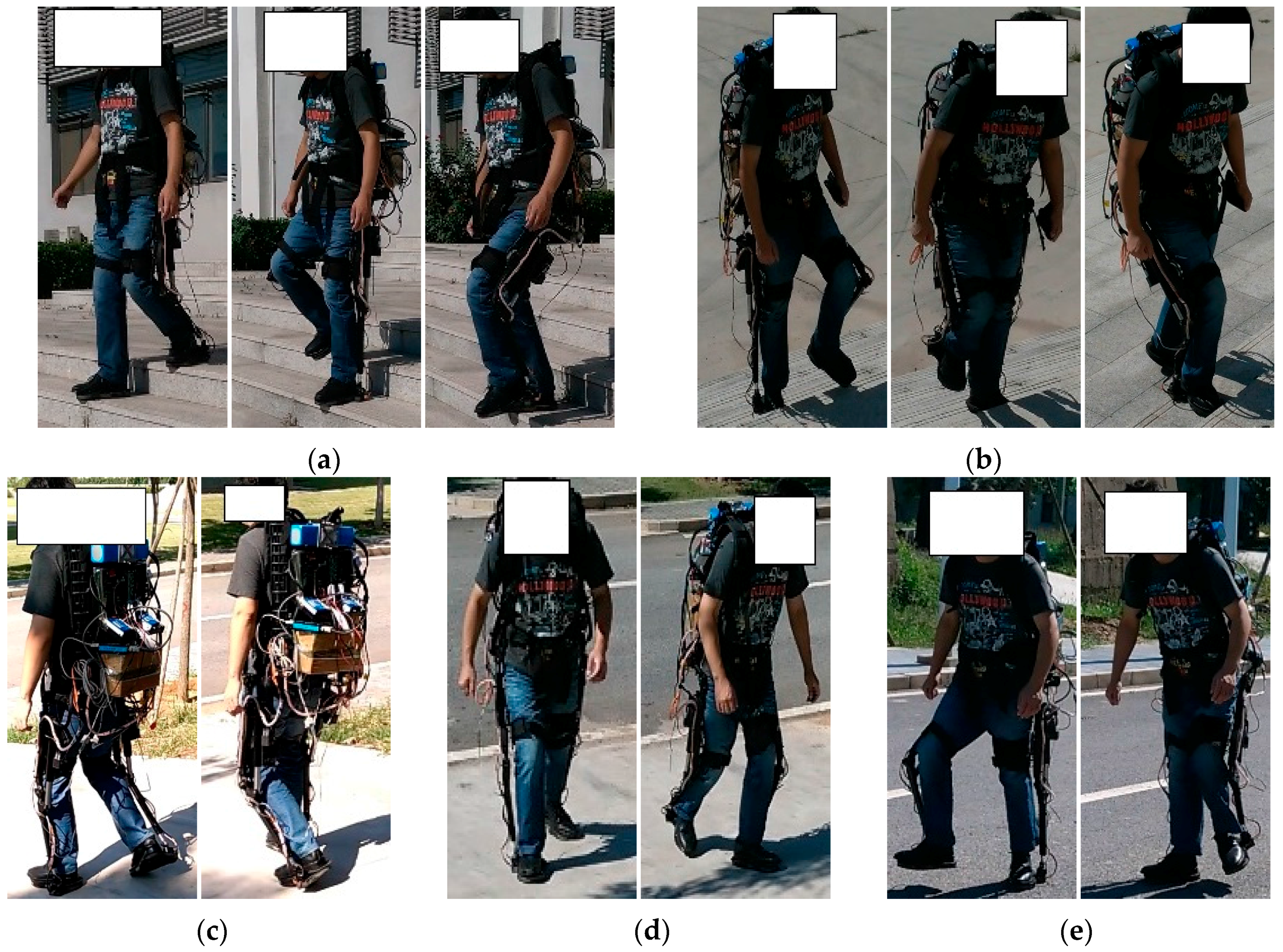
2.1. Exoskeleton System Description
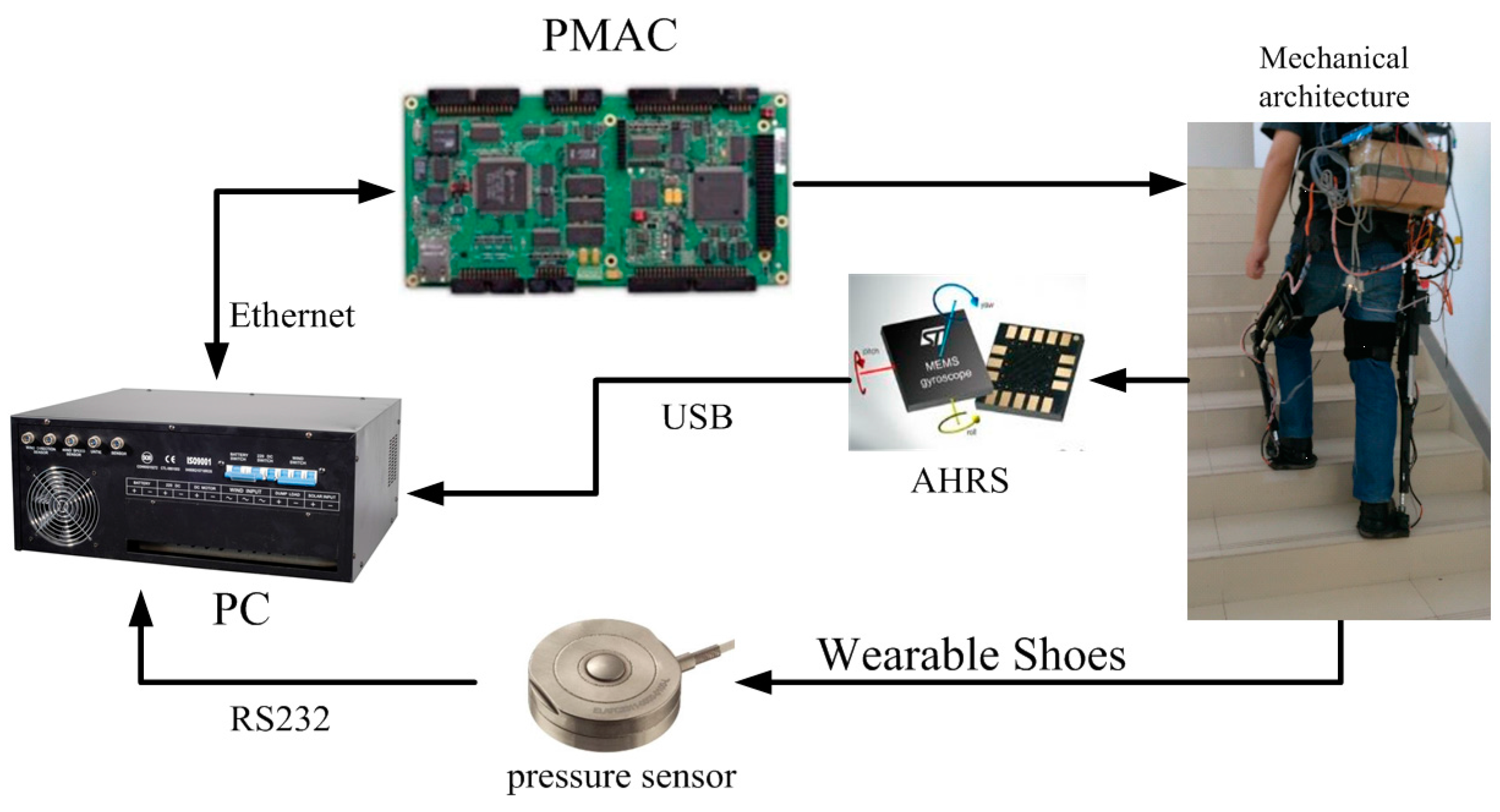
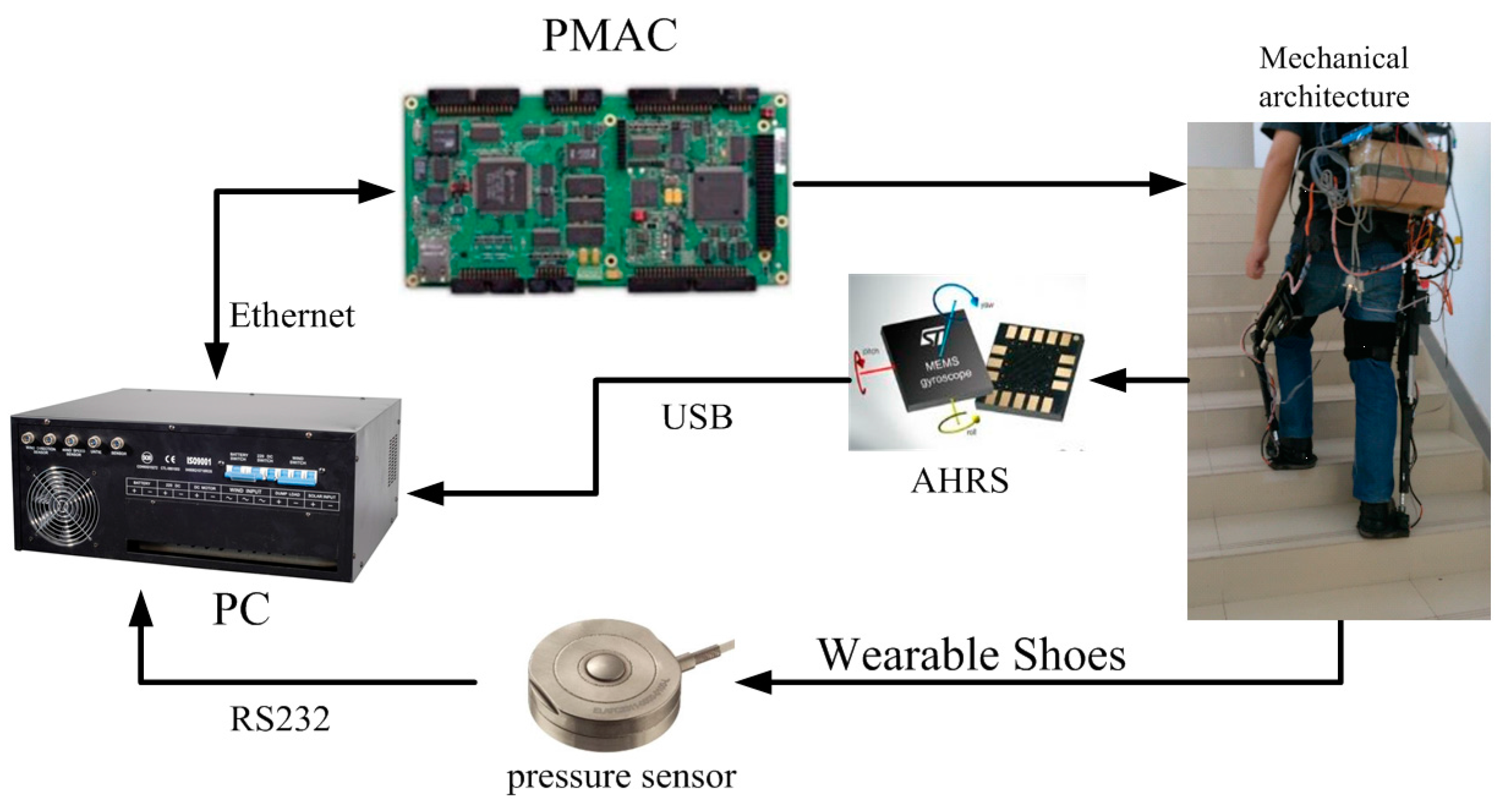
2.2. Data Collection System
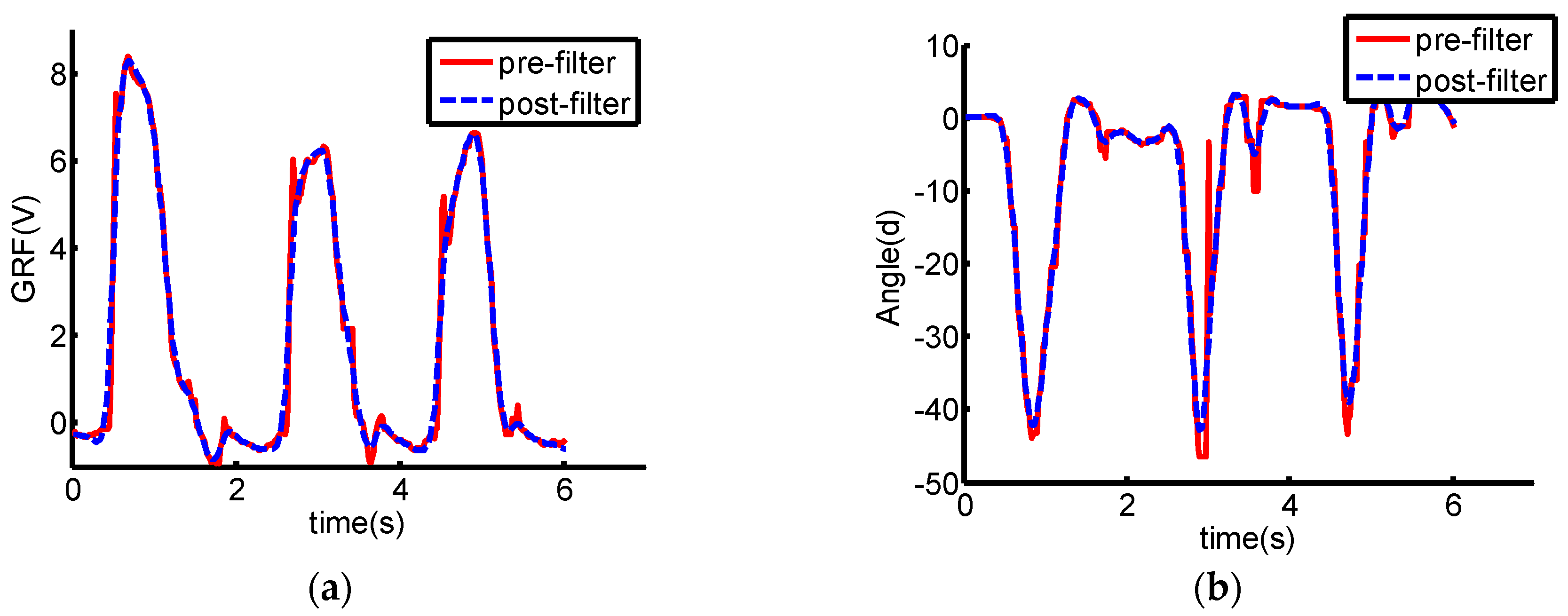
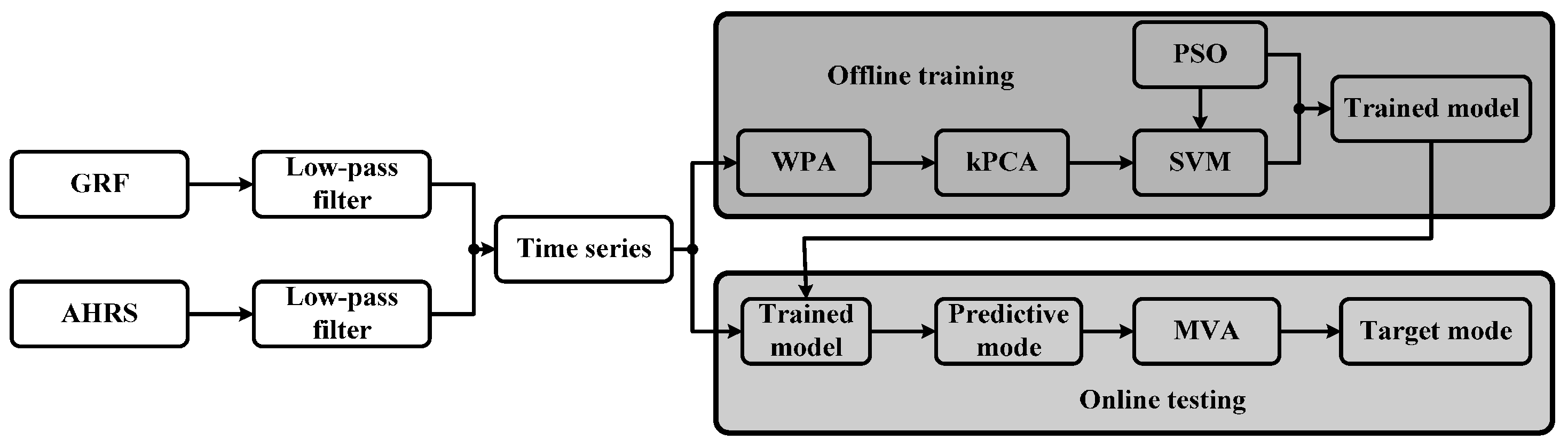
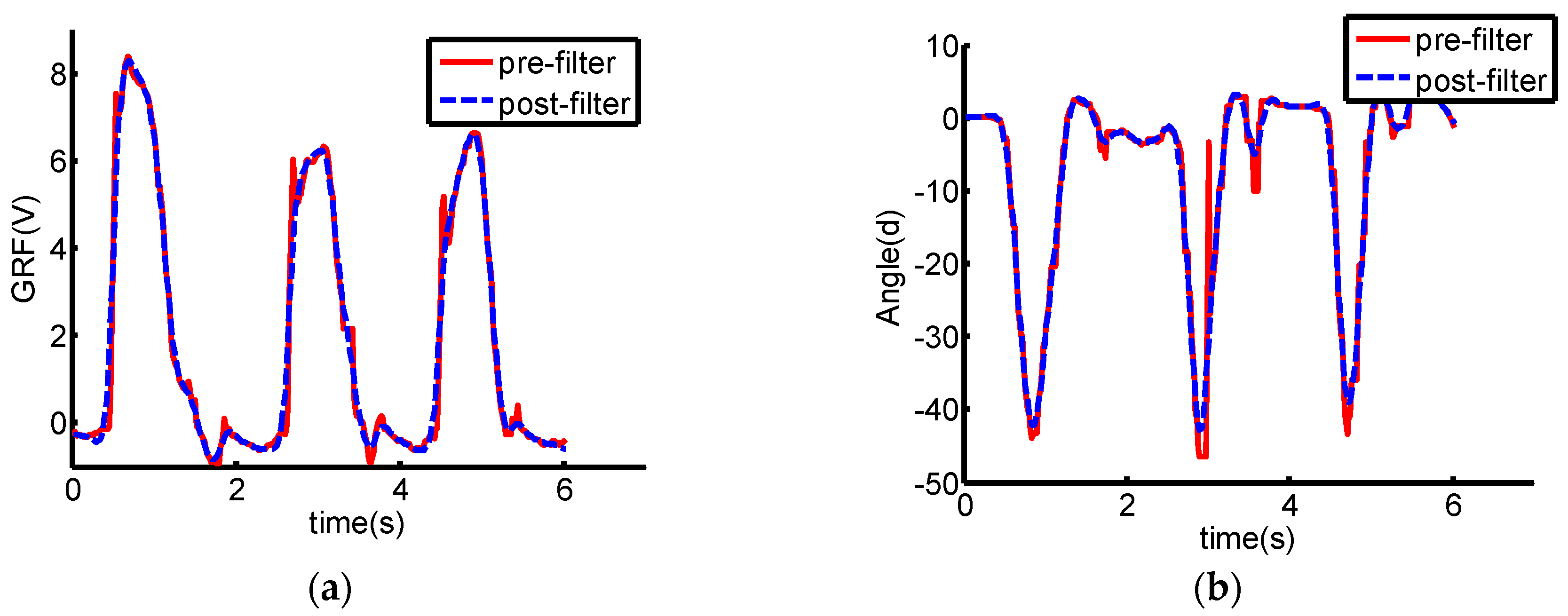
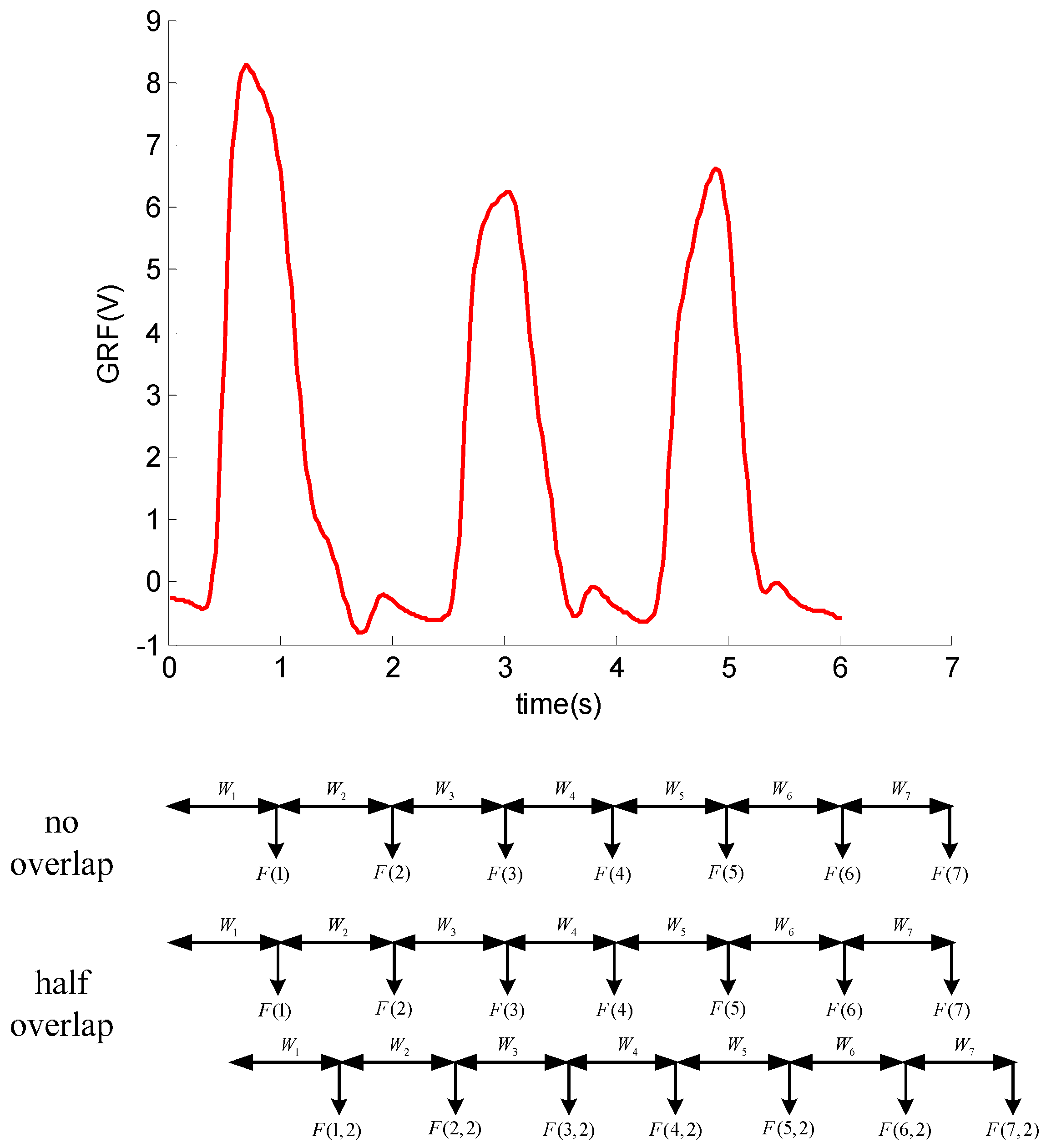
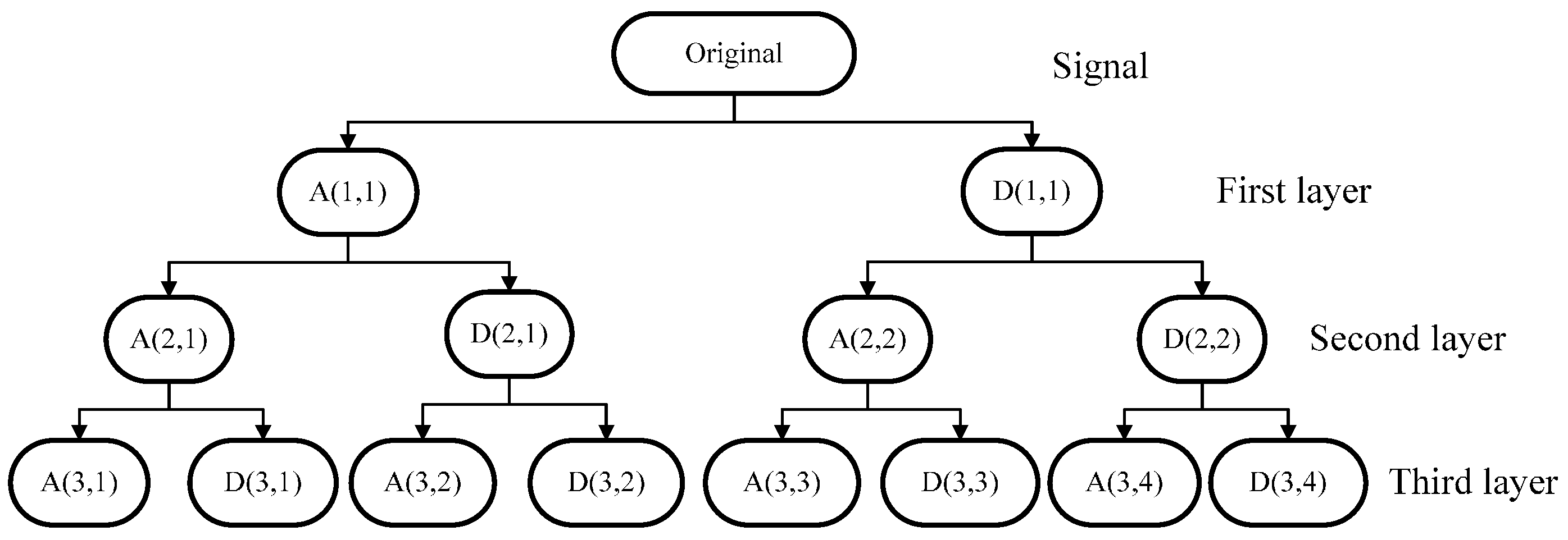
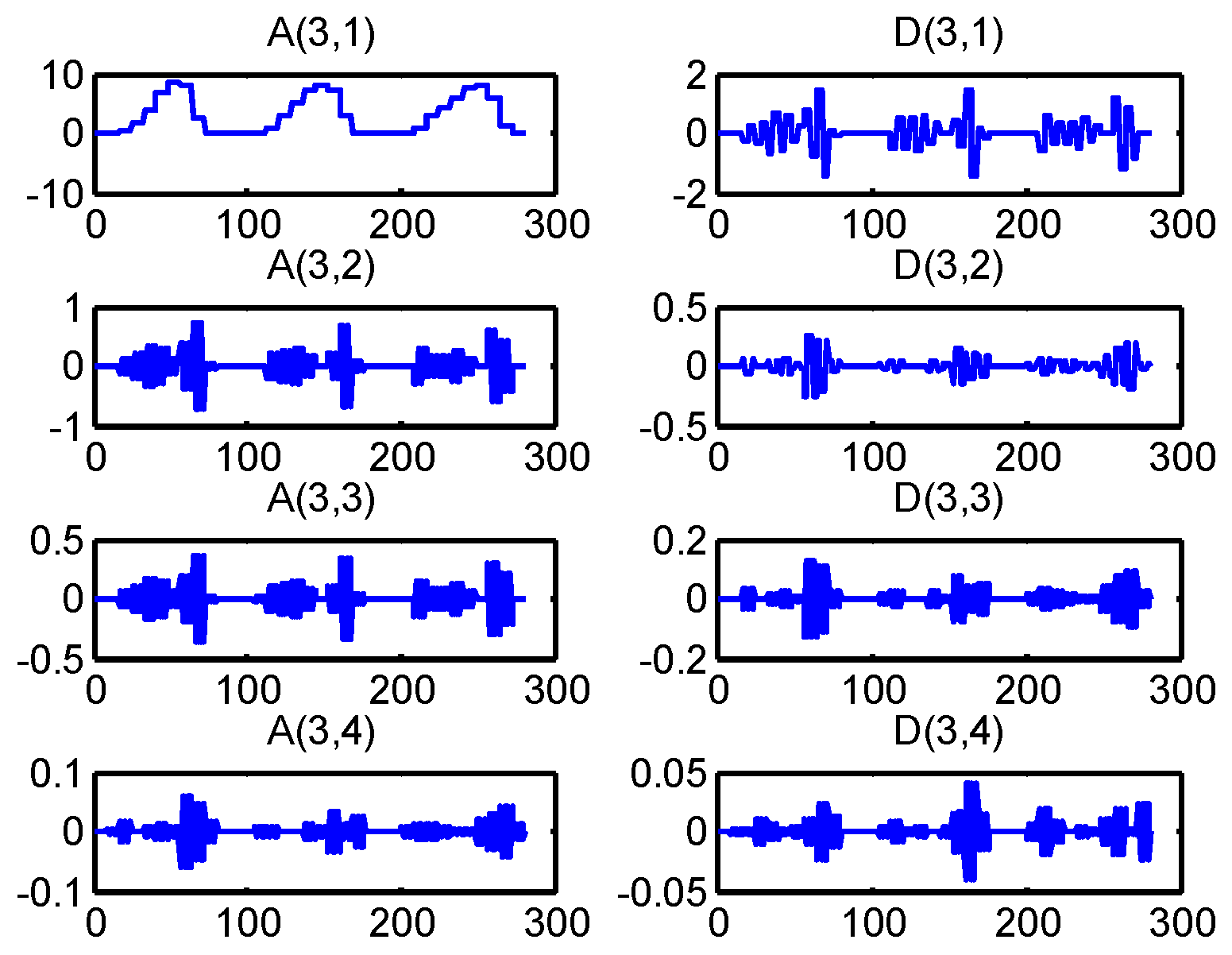
2.3. Feature Extraction and Dimension Reduction
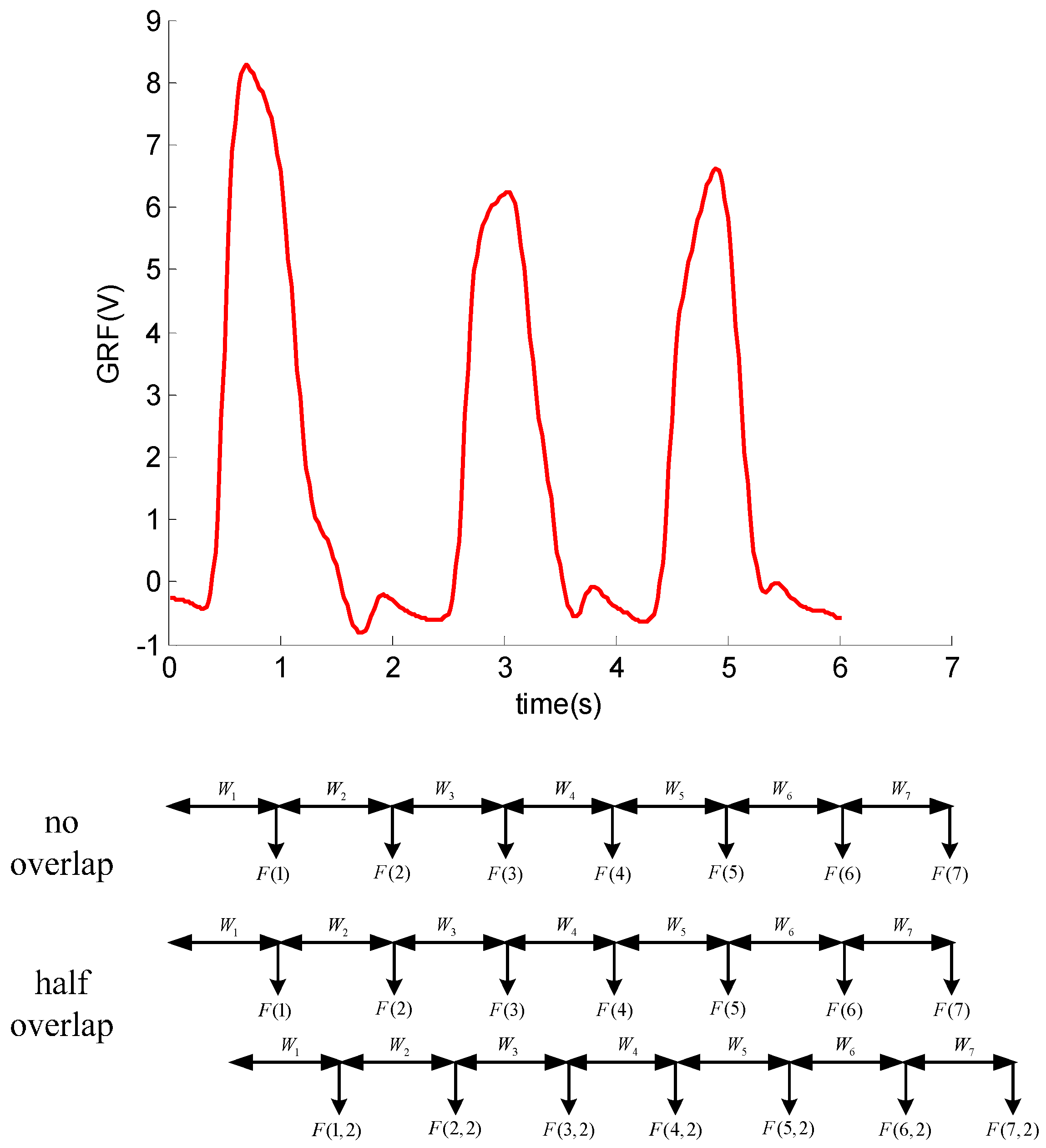
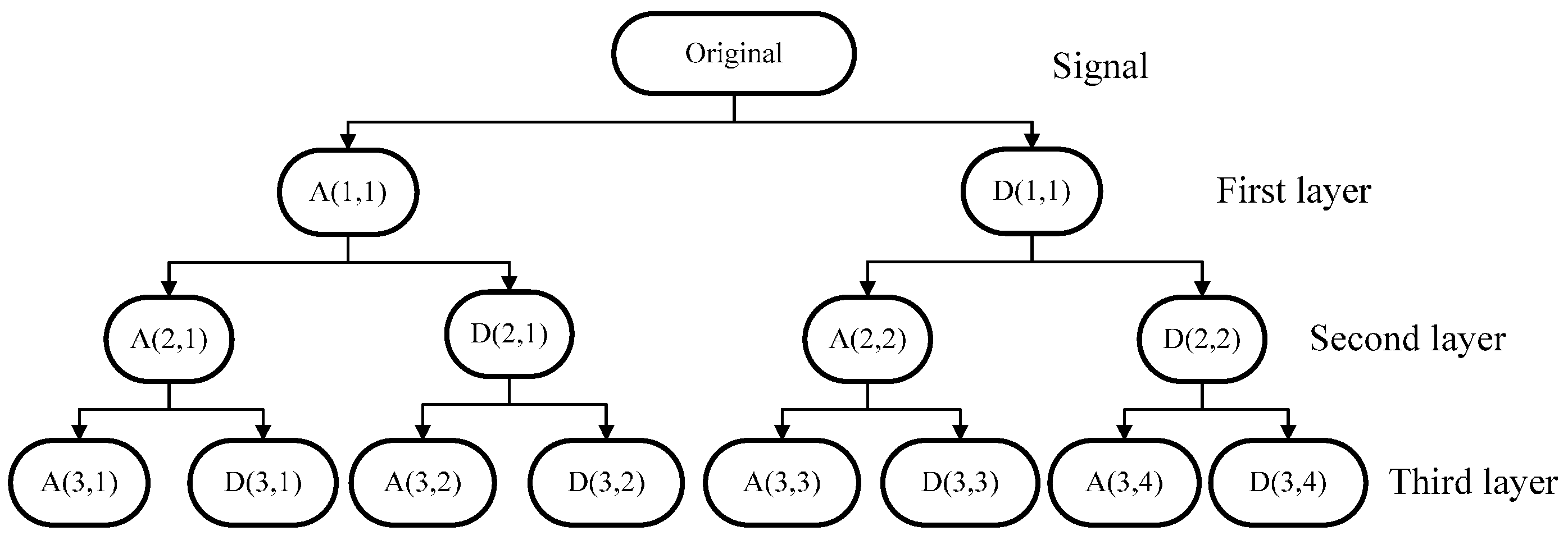
2.3.1. Feature Extraction
2.3.2. Feature Set Composition
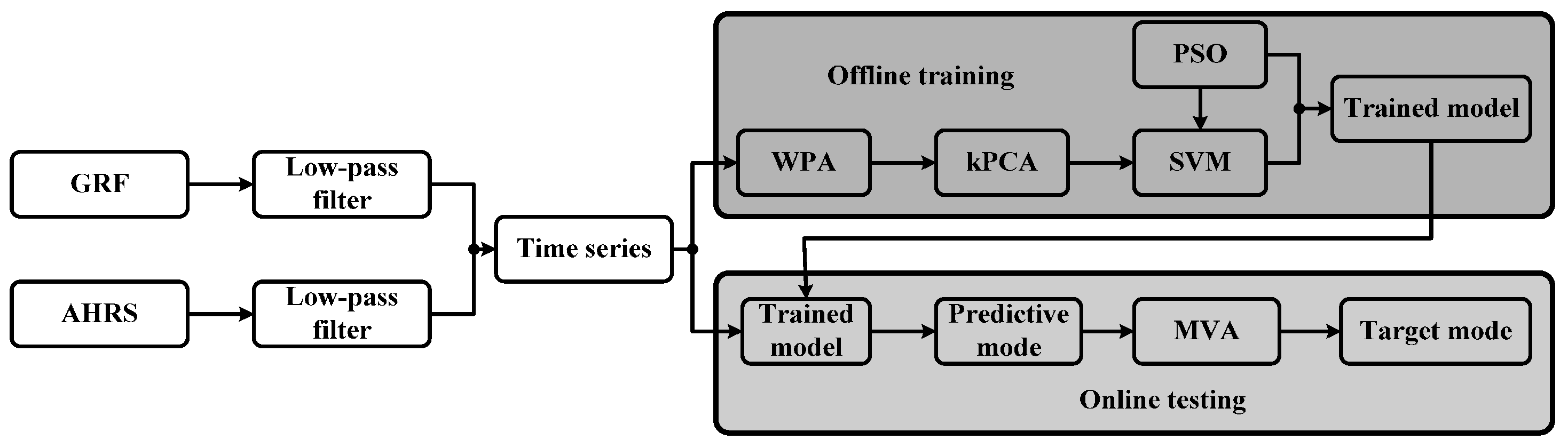
3. Locomotion Mode Identification Using SVM Optimized by PSO
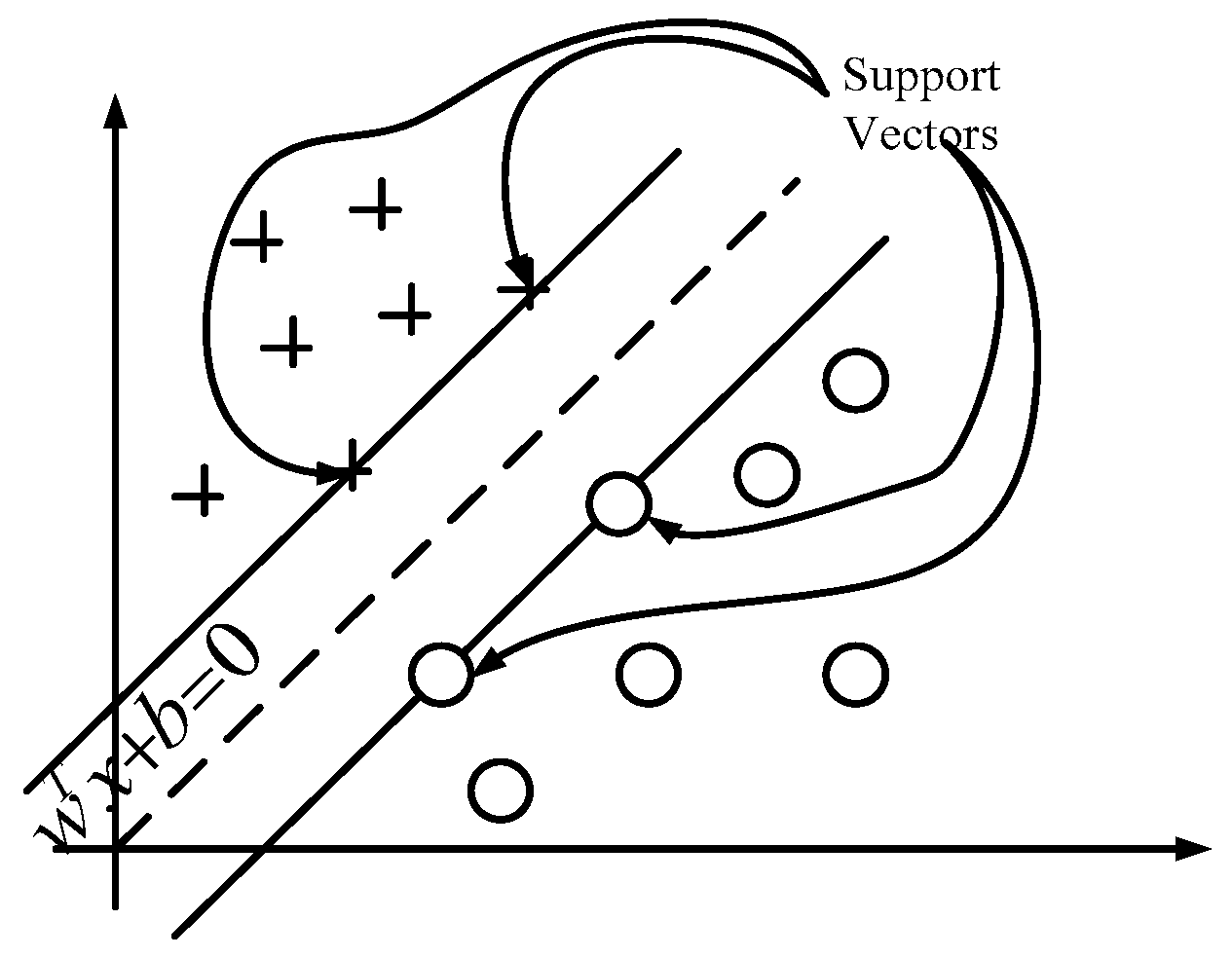
3.1. SVM for Classifier
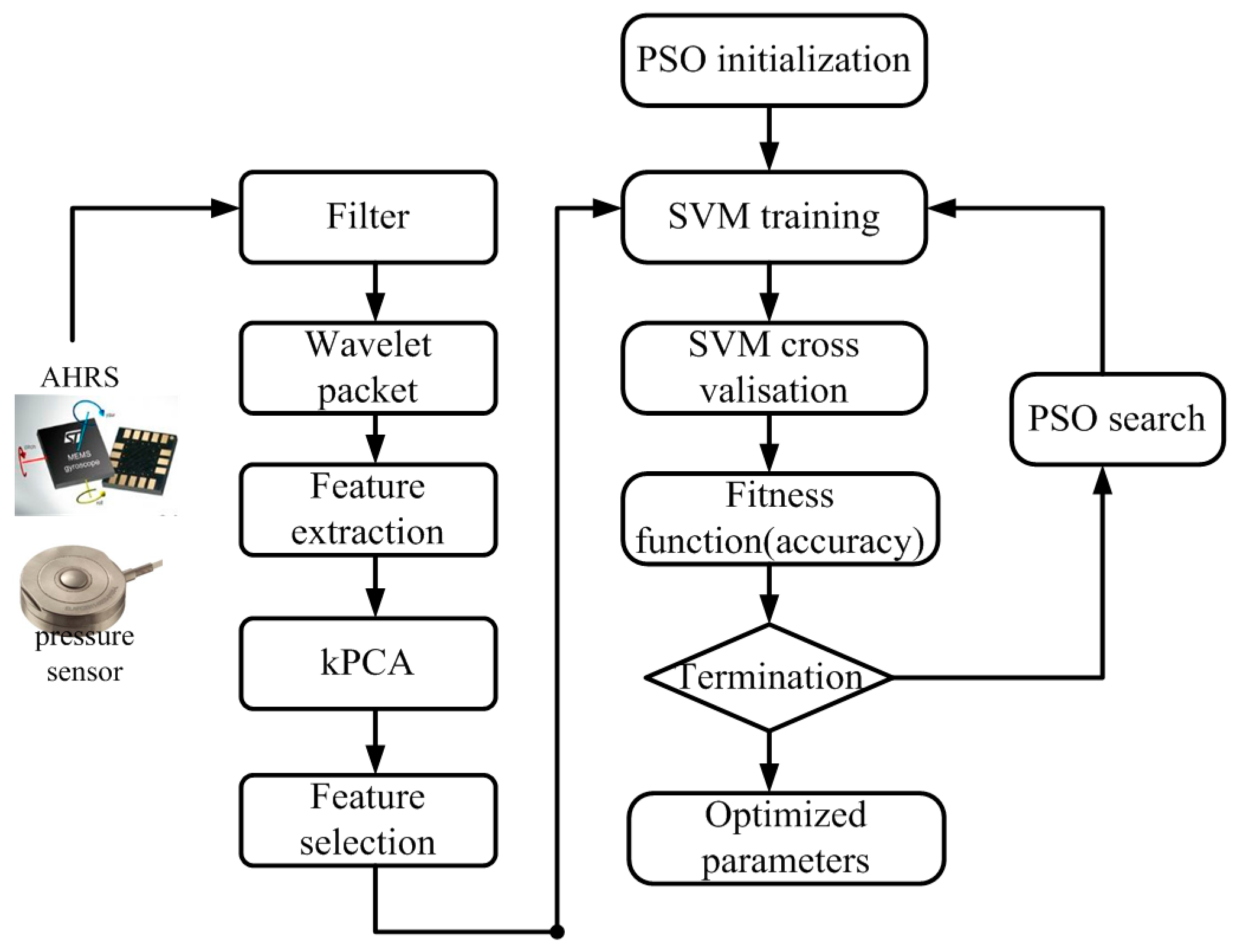
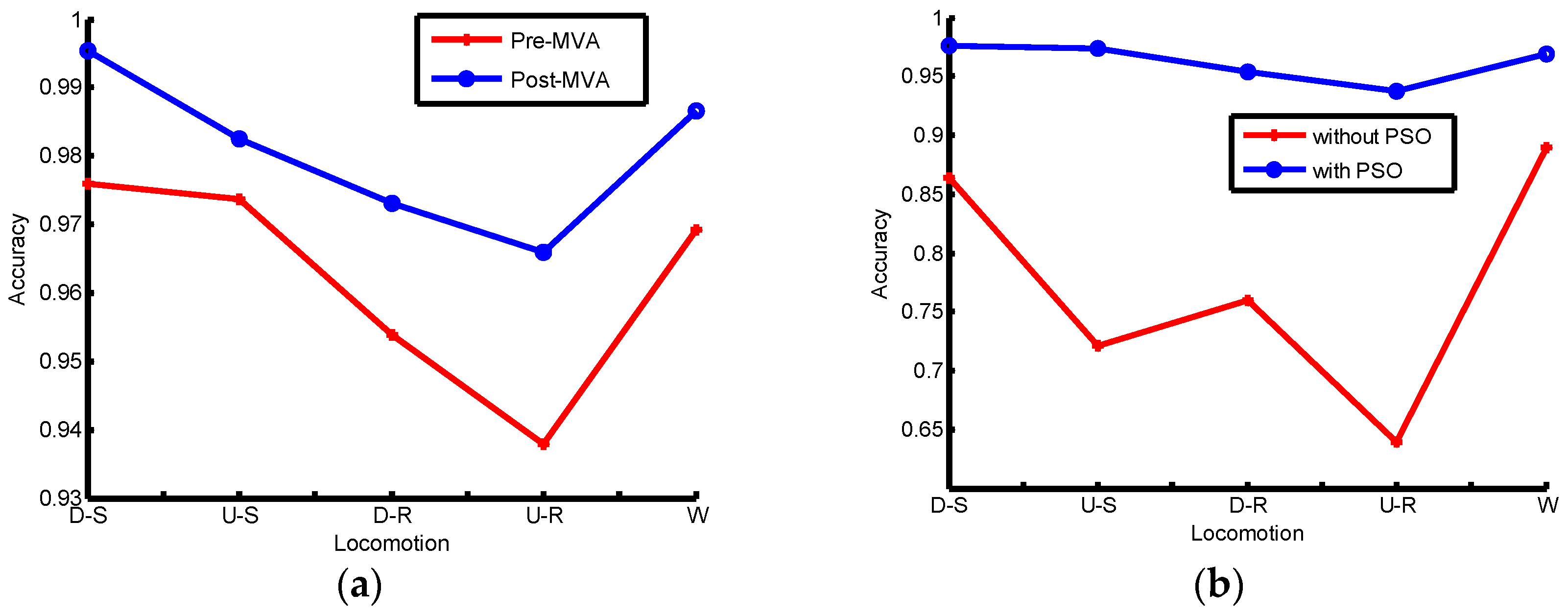
3.2. PSO-Based SVM
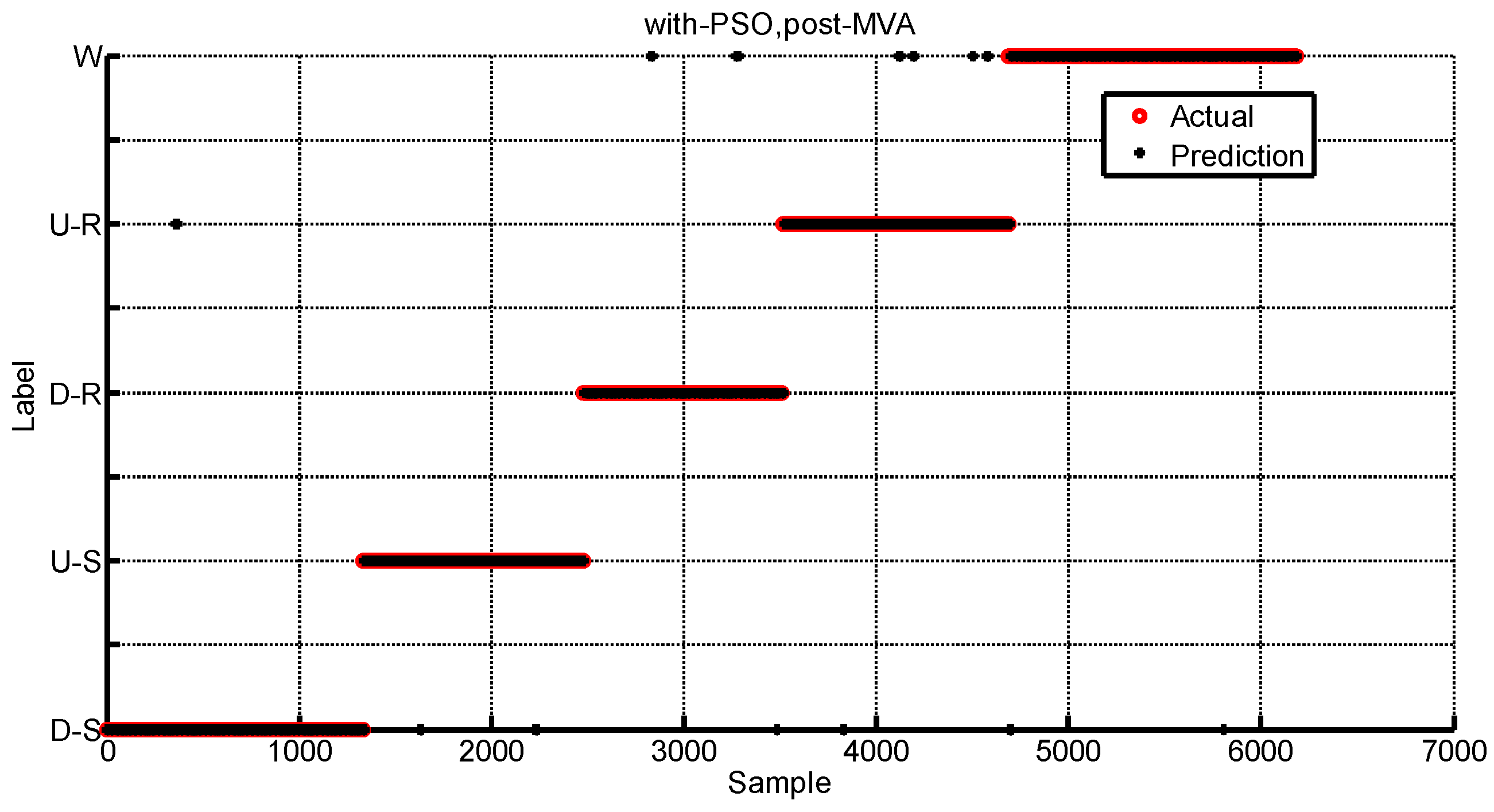
3.3. Post-Processing Using Majority Voting Algorithm (MVA)
4. Experiment Protocol and Results Analysis
4.1. Experiment Protocol
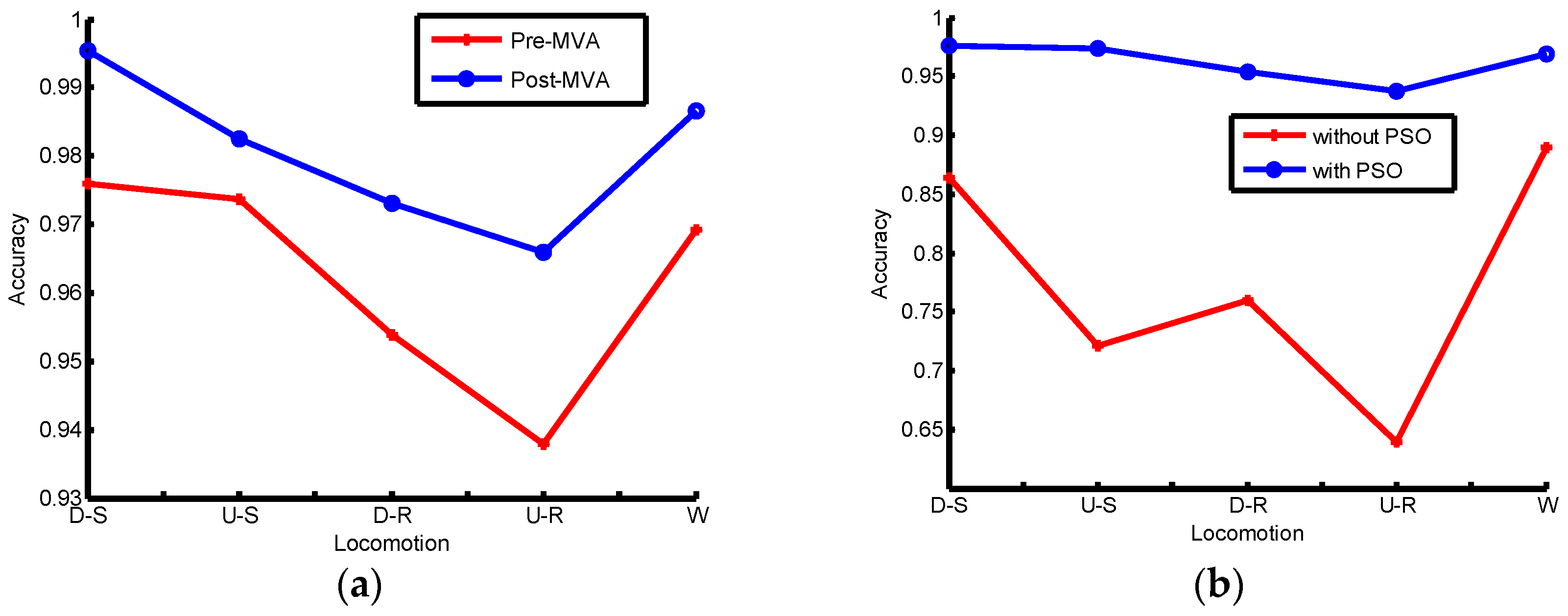
4.2. Performance Evaluation
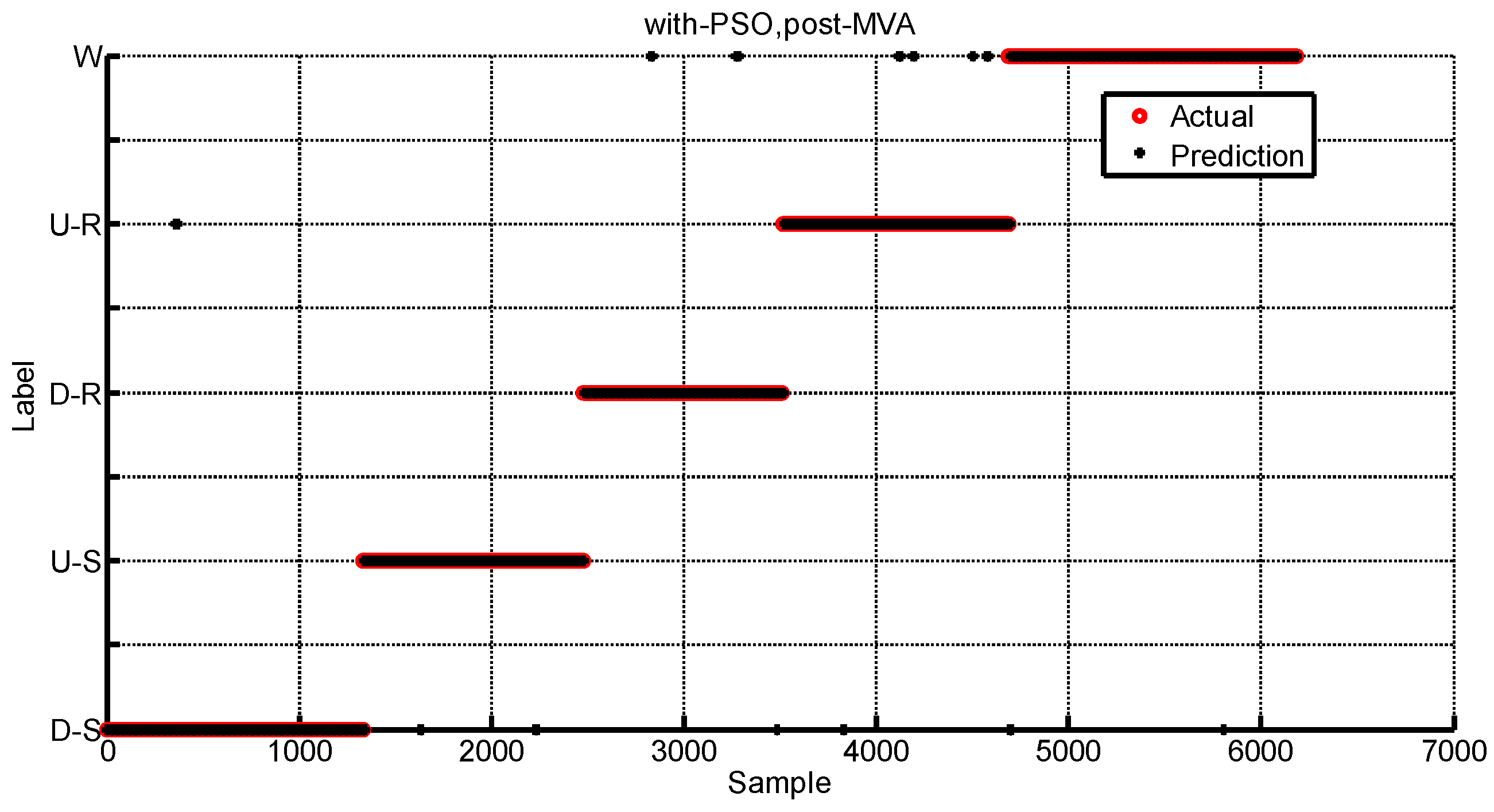
4.3. Results Analysis
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Au, S.; Weber, J.; Herr, H. Powered ankle-foot prosthesis improves walking metabolic economy. IEEE Trans. Robot. 2009, 25, 51–66. [Google Scholar] [CrossRef]
- Sup, F.; Varol, H.; Mitchell, J.; Withrow, T.; Goldfarb, M. Preliminary evaluations of a self-contained anthropomorphic transfemoral prosthesis. IEEE/ASME Trans. Mechatron. 2009, 14, 667–676. [Google Scholar] [CrossRef] [PubMed]
- Hitt, J.; Sugar, T.; Holgate, M.; Bellmann, R.; Hollander, K. Robotic transtibial prosthesis with biomechanical energy regeneration. Ind. Robot 2009, 36, 441–447. [Google Scholar] [CrossRef]
- Joshi, D.; Nakamura, B.H.; Hahn, M.E. High energy spectrogram with integrated prior knowledge for EMG-based locomotion classification. Med. Eng. Phys. 2015, 37, 518–524. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.H.; Cho, C.Y.; Ryu, J. Real-Time Locomotion Mode Recognition Employing Correlation Feature Analysis Using EMG Pattern. ETRI J. 2014, 36, 99–105. [Google Scholar] [CrossRef]
- Au, S.; Berniker, M.; Herr, H. Powered ankle-foot prosthesis to assist level-ground and stair-descent gaits. Neural Netw. 2008, 21, 654–666. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.; Kuiken, T.A.; Lipschutz, R.D. A strategy for identifying locomotion modes using surface electromyography. IEEE Trans. Biomed. Eng. 2009, 56, 65–73. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.; Zhang, F.; Hargrove, L.J.; Dou, Z.; Rogers, D.R.; Englehart, K.B. Continuous locomotion-mode identification for prosthetic legs based on neuromuscular-mechanical fusion. IEEE Trans. Biomed. Eng. 2011, 58, 2867–2875. [Google Scholar] [CrossRef] [PubMed]
- Young, A.J.; Kuiken, T.A.; Hargrove, L.J. Analysis of using EMG and mechanical sensors to enhance intent recognition in powered lower limb prostheses. J. Neural Eng. 2014, 11, 056021. [Google Scholar] [CrossRef] [PubMed]
- Joshi, D.; Hahn, M.E. Terrain and direction classification of locomotion transitions using neuromuscular and mechanical input. Ann. Biomed. Eng. 2016, 44, 1275–1284. [Google Scholar] [CrossRef] [PubMed]
- Enhao, Z.; Long, W.; Kunlin, W. A noncontact capacitive sensing system for recognizing locomotion modes of transtibial amputees. IEEE Trans. Bio-Med. Eng. 2014, 61, 2911–2920. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Wang, Q.; Zheng, E. A wearable plantar pressure measurement system: Design specifications and first experiments with an amputee. Adv. Intell. Syst. Comput. 2013, 194, 273–281. [Google Scholar]
- Yuan, K.; Sun, S.; Wang, Z. A fuzzy logic based terrain identification approach to prosthesis control using multi-sensor fusion. In Proceedings of the IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 3376–3381.
- David, L.Y.; Hsiao-Wecksler, E.T. Gait mode recognition and control for a portable-powered ankle-foot orthosis. In Proceedings of the IEEE International Conference on Rehabilitation Robotics (ICORR), Seattle, WA, USA, 24–26 June 2013; pp. 1–8.
- Young, A.J.; Simon, A.M.; Fey, N.P.; Hargrove, L.J. Intent recognition in a powered lower limb prosthesis using time history information. Ann. Biomed. Eng. 2014, 42, 631–641. [Google Scholar] [CrossRef] [PubMed]
- Zhang, F.; Fang, Z.; Liu, M. Preliminary design of a terrain recognition system. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; pp. 5452–5455.
- Varol, H.A.; Sup, F.; Goldfarb, M. Multiclass real-time intent recognition of a powered lower limb prosthesis. IEEE Trans. Biomed. Eng. 2010, 57, 542–551. [Google Scholar] [CrossRef] [PubMed]
- Chen, B.; Zheng, E.; Wang, Q. A locomotion intent prediction system based on multi-sensor fusion. Sensors 2014, 14, 12349–12369. [Google Scholar] [CrossRef] [PubMed]
- Yuan, K.; Wang, Q.; Wang, L. Fuzzy-logic-based terrain identification with multisensor fusion for transtibial amputees. IEEE/ASME Trans. Mechatron. 2015, 20, 618–630. [Google Scholar] [CrossRef]
- Wang, L. Support vector machines: Theory and applications. Phys. A Stat. Mech. Appl. 2005, 302, 110–118. [Google Scholar]
- Wang, T.; Ye, X.; Wang, L. Grid Search Optimized SVM Method for Dish-like Underwater Robot Attitude Prediction. In Proceedings of the 2012 Fifth International Joint Conference on IEEE Computational Sciences and Optimization (CSO), Harbin, China, 23–26 June 2012; pp. 839–843.
- Liu, J.; Xie, Q.; Zhang, Y. A method for missing data recovery of waste gas monitoring in animal building based on GA-SVM. Int. J. Smart Home 2015, 9, 175–184. [Google Scholar] [CrossRef]
- Lu, M.Z.; Chen, C.P.; Huo, J.B. Optimization of combined kernel function for SVM by Particle Swarm Optimization. In Proceedings of the 2009 International Conference on IEEE Machine Learning and Cybernetics, Baoding, China, 12–15 July 2009; pp. 1160–1166.
- Olsson, A.E. Particle Swarm Optimization: Theory, Techniques, and Applications; Engineering Tools Techniques & Tables; Nova Science Publishers, Inc.: Hauppauge, NY, USA, 2011. [Google Scholar]
- Shieh, M.Y.; Chiou, J.S.; Hu, Y.C.; Wang, K.Y. Applications of PCA and SVM-PSO based real-time face recognition system. Math. Probl. Eng. 2014, 2014, 1–13. [Google Scholar] [CrossRef]
- Long, Y.; Du, Z.; Wang, W. A fuzzy logic system tuned with particle swarm optimization for gait segmentation using insole measured ground reaction force. In Proceedings of the 2014 IEEE 11th World Congress on Intelligent Control and Automation (WCICA), Shenyang, China, 29 June–4 July 2014; pp. 513–518.
- Novak, D.; Riener, R. A survey of sensor fusion methods in wearable robotics. Robot. Auton. Syst. 2015, 73, 155–170. [Google Scholar] [CrossRef]
- Long, Y.; Du, Z.; Wang, W. Three gait patterns recognition with ground reaction forceusing support vector machine. In Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics, Bali, Indonesia, 5–10 December 2014; pp. 1427–1432.
- Li, Y.; Hou, Y. Search audio data with the wavelet pyramidal algorithm. Inf. Process. Lett. 2004, 91, 49–55. [Google Scholar] [CrossRef]
- Mallat, S. A theory for multiresolution signal dcomposition: The wavelet representation. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 674–693. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Z. Study on feature extraction method in border monitoring system using optimum wavelet packet decomposition. AEU Int. J. Electron. Commun. 2012, 66, 575–580. [Google Scholar] [CrossRef]
- Yin, J.; Gao, C.; Jia, X. Wavelet Packet Analysis and Gray Model for Feature Extraction of Hyper spectral Data. IEEE Geosci. Remote Sens. Lett. 2013, 10, 682–686. [Google Scholar]
- Zhao, X.; Zhang, S.; Zhou, C.; Hu, Z.; Li, R.; Jiang, J. Experimental study of hydraulic cylinder leakage and fault feature extraction based on wavelet packet analysis. Comput. Fluids. 2015, 106, 33–40. [Google Scholar] [CrossRef]
- Landgrebe, D.A. Signal Theory Methods in Multispectral Remote Sensing; John Wiley & Sons: Hoboken, NJ, USA, 2003. [Google Scholar]
- Hughes, G. On the mean accuracy of statistical pattern recognizers. IEEE Trans. Inf. Theory 1968, 14, 55–63. [Google Scholar] [CrossRef]
- Sarwinda, D.; Arymurthy, A.M. Feature selection using kernel PCA for Alzheimer’s disease detection with 3D MR Images of brain. In Proceedings of the 2013 International Conference on IEEE Advanced Computer Science and Information Systems (ICACSIS), Bali, Indonesia, 28–29 September 2013; pp. 329–333.
- Li, P.; Dong, L.; Xiao, H.; Xu, M. A cloud image detection method based on SVM vector machine. Neurocomputing 2015, 169, 34–42. [Google Scholar] [CrossRef]
- Rencher, A.C. Methods of Multivariate Analysis; Wiley; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Burges, C.J.C. A tutorial on support vector machines for pattern recognition. Data Min. Knowl. Discov. 1998, 2, 121–167. [Google Scholar] [CrossRef]
- Nocedal, J.; Wright, S. Numerical Optimization; Springer Science & Business Media: Heidelberg, Berlin, Germany, 1999. [Google Scholar]
- Steidl, G. Supervised learning by support vector machines. Handbook of Mathematical Methods in Imaging; Springer Science & Business Media: Heidelberg, Berlin, Germany, 2015. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property-Part | Thigh | Shank |
|---|---|---|
| Mass (kg) | 0.82 | 0.6 |
| Length (mm) | 431 | 390 |
| Range of DoF (°) | −37~70 | 0~75 |
| D-S | U-S | D-R | U-R | W | |
|---|---|---|---|---|---|
| D-S | 86.4% ± 1.2% | 4.73% ± 0.6% | 0.15% ± 0.04% | 1.5% ± 0.13% | 7.22% ± 1.1% |
| U-S | 25.3% ± 0.85% | 72.1% ± 1.56% | 0.0% ± 0.0% | 0.0% ± 0.0% | 2.62% ± 0.2% |
| D-R | 10.98% ± 1.1% | 3.28% ± 0.2% | 75.9% ± 1.24% | 4.34% ± 0.03% | 5.5% ± 0.23% |
| U-R | 17.72% ± 1.05% | 5.54% ± 0.04% | 0.94% ± 0.25% | 63.97% ± 2.56% | 11.84% ± 0.42% |
| W | 7.3% ± 0.25% | 2.07% ± 0.13% | 0.07% ± 0.01% | 1.61% ± 0.13% | 88.96% ± 2.1% |
| D-S | U-S | D-R | U-R | W | |
|---|---|---|---|---|---|
| D-S | 97.6% ± 0.85% | 1.05% ± 0.05% | 0.15% ± 0.03% | 0.06% ± 0.0% | 0.06% ± 0.01% |
| U-S | 2.45% ± 0.1% | 97.4% ± 0.56% | 0.0% ± 0.0% | 0.0% ± 0.0% | 0.18% ± 0.06% |
| D-R | 1.64% ± 0.22% | 0.67% ± 0.1% | 95.4% ± 1.14% | 0.39% ± 0.01% | 1.93% ± 0.15% |
| U-R | 1.87% ± 0.03% | 0.6% ± 0.0% | 0.26% ± 0.02% | 93.8% ± 0.25% | 3.5% ± 0.24% |
| W | 1.94% ± 0.11% | 0.6% ± 0.02% | 0% ± 0.0% | 0.54% ± 0.02% | 96.9% ± 0.86% |
| D-S | U-S | D-R | U-R | W | |
|---|---|---|---|---|---|
| D-S | 99.5% ± 0.05% | 0.0% ± 0.0% | 0.0% ± 0.0% | 0.05% ± 0.05% | 0.0% ± 0.0% |
| U-S | 0.34% ± 0.01% | 98.3% ± 0.62% | 0.0% ± 0.0% | 0.85% ± 0.05% | 0.51% ± 0.02% |
| D-R | 0.01% ± 0.01% | 0.58% ± 0.08% | 97.3% ± 0.45% | 0.0% ± 0.0% | 2.02% ± 0.05% |
| U-R | 0.77% ± 0.1% | 0.0% ± 0.0% | 0.51% ± 0.12% | 97.36% ± 0.66% | 2.13% ± 0.13% |
| W | 0% ± 0% | 0.0% ± 0.0% | 0.0% ± 0.0% | 0.47% ± 0.11% | 98.66% ± 0.24% |
| Transition | ID |
|---|---|
| W to D-S | 48% ± 2.8% |
| D-S to W | 46.8% ± 4.5% |
| W to U-S | −10.4% ± 1.2% |
| U-S to W | −6.4% ± 0.8% |
| W to D-R | 31.5% ± 2.45% |
| D-R to W | 40.5% ± 5.2% |
| W to U-R | 2.5% ± 0.8% |
| U-R to W | 4.5% ± 1.8% |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Long, Y.; Du, Z.-J.; Wang, W.-D.; Zhao, G.-Y.; Xu, G.-Q.; He, L.; Mao, X.-W.; Dong, W. PSO-SVM-Based Online Locomotion Mode Identification for Rehabilitation Robotic Exoskeletons. Sensors 2016, 16, 1408. https://doi.org/10.3390/s16091408
Long Y, Du Z-J, Wang W-D, Zhao G-Y, Xu G-Q, He L, Mao X-W, Dong W. PSO-SVM-Based Online Locomotion Mode Identification for Rehabilitation Robotic Exoskeletons. Sensors. 2016; 16(9):1408. https://doi.org/10.3390/s16091408
Chicago/Turabian StyleLong, Yi, Zhi-Jiang Du, Wei-Dong Wang, Guang-Yu Zhao, Guo-Qiang Xu, Long He, Xi-Wang Mao, and Wei Dong. 2016. "PSO-SVM-Based Online Locomotion Mode Identification for Rehabilitation Robotic Exoskeletons" Sensors 16, no. 9: 1408. https://doi.org/10.3390/s16091408
APA StyleLong, Y., Du, Z.-J., Wang, W.-D., Zhao, G.-Y., Xu, G.-Q., He, L., Mao, X.-W., & Dong, W. (2016). PSO-SVM-Based Online Locomotion Mode Identification for Rehabilitation Robotic Exoskeletons. Sensors, 16(9), 1408. https://doi.org/10.3390/s16091408