
Flexible Piezoelectric Tactile Sensor Array for Dynamic Three-Axis Force Measurement

Abstract
:1. Introduction
2. Structure and Operating Principle
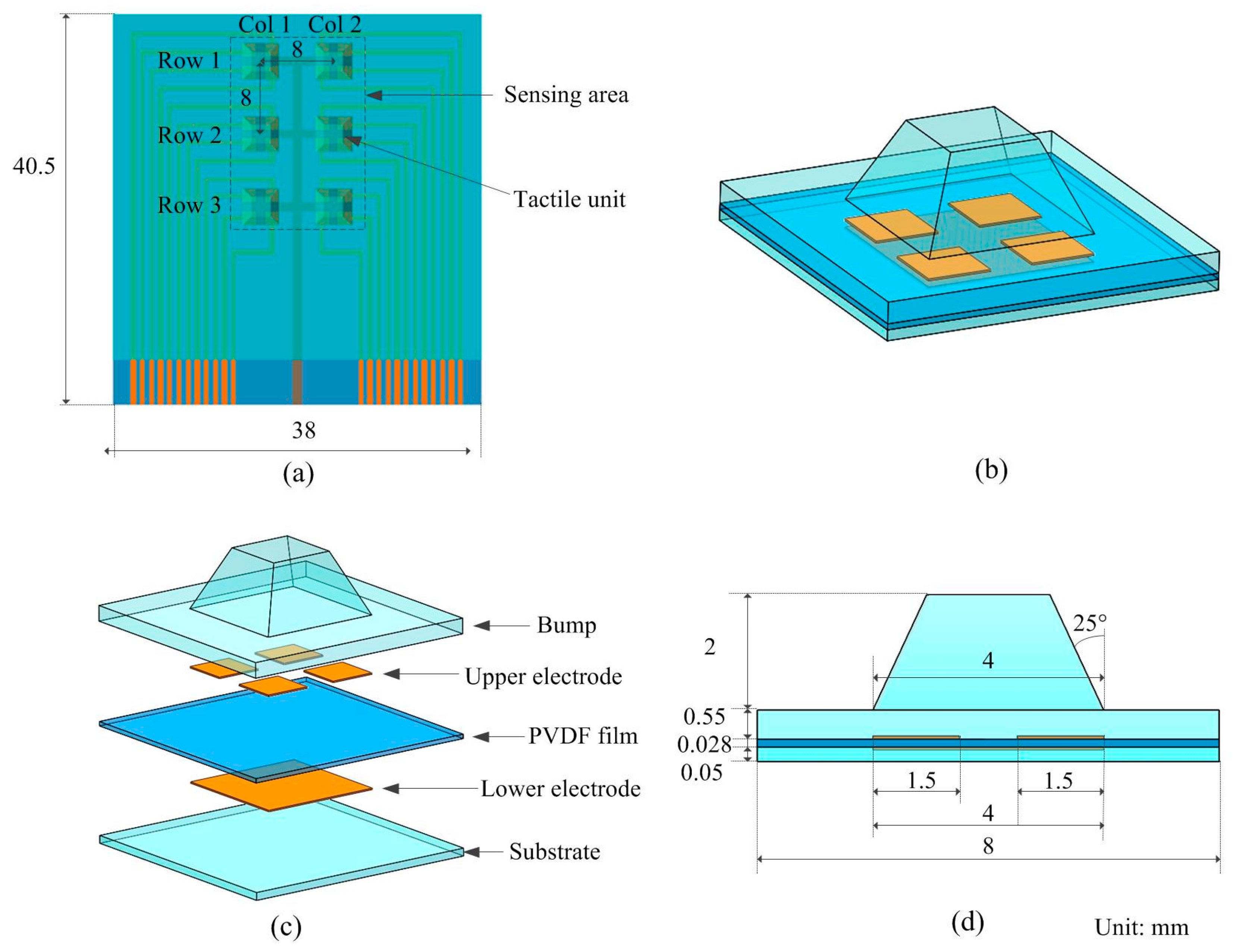
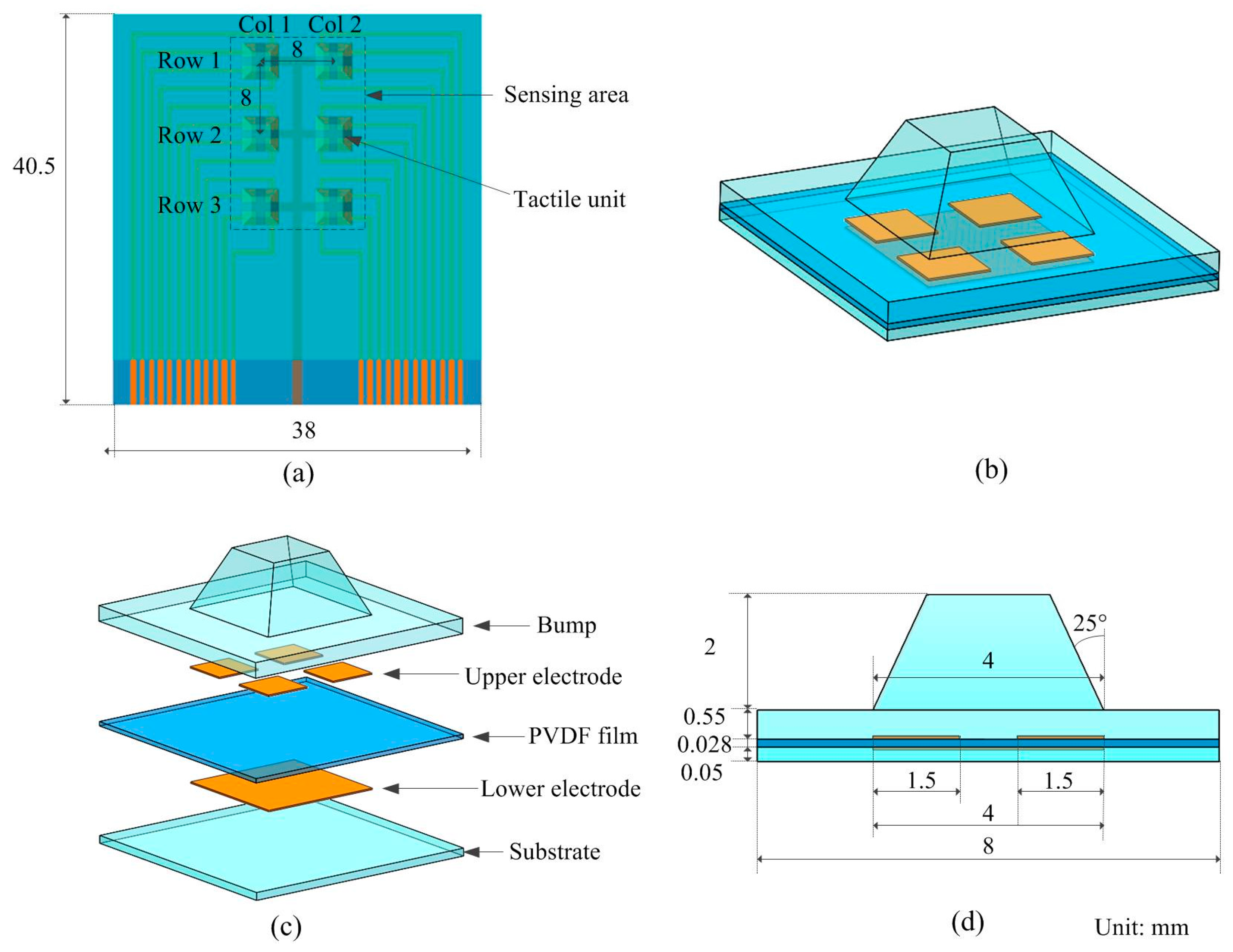
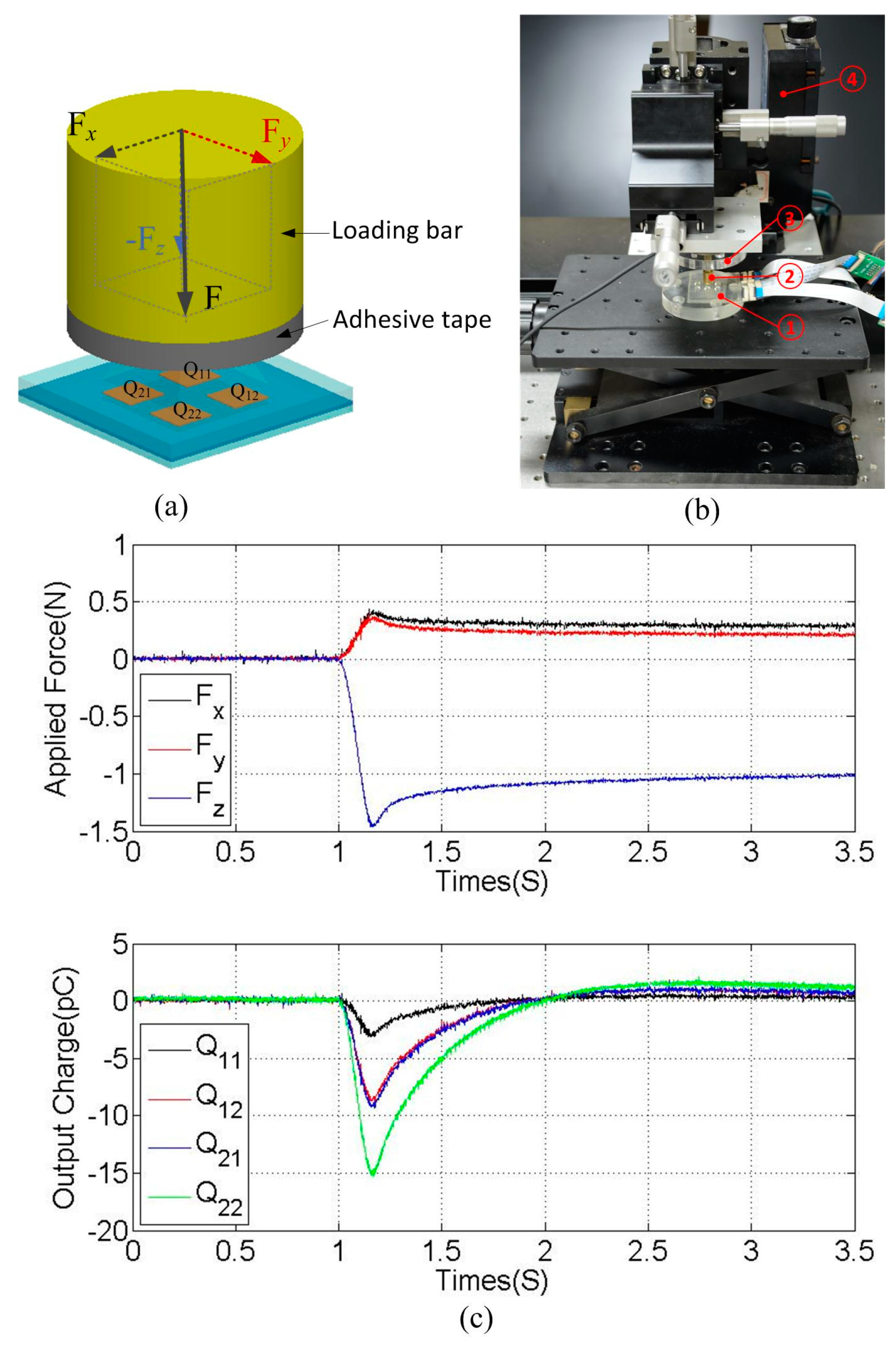
2.1. Sensor Structure
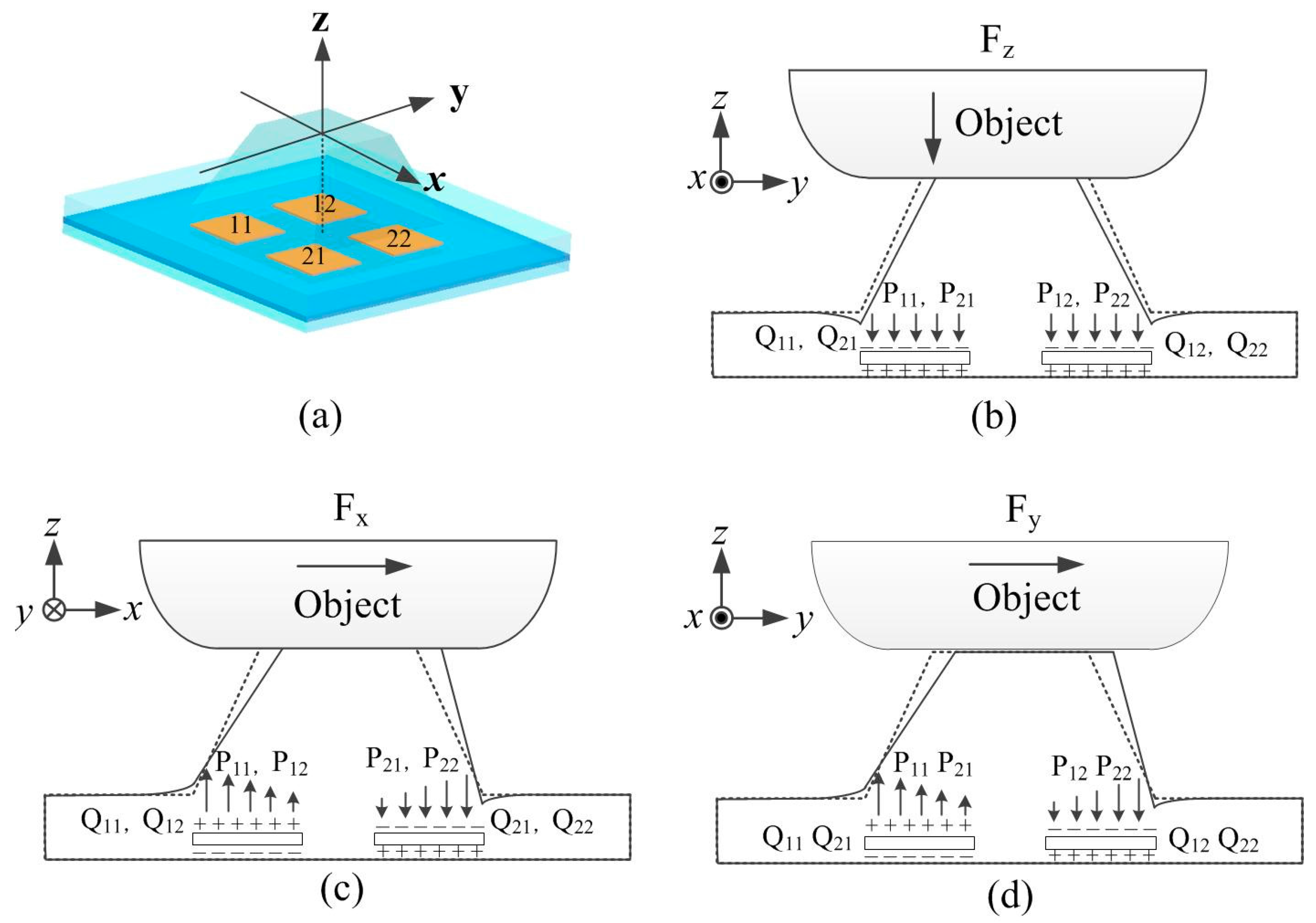
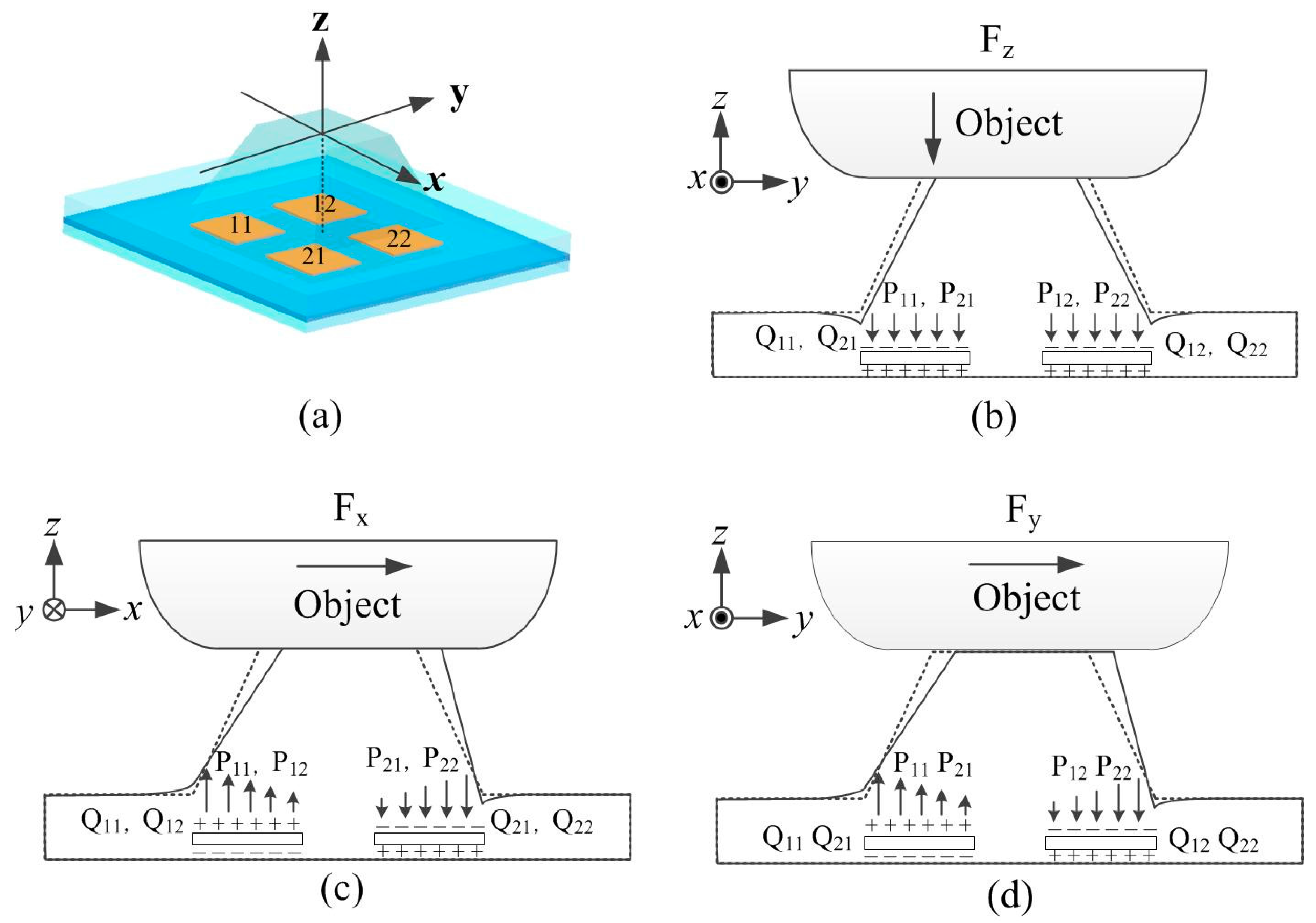
2.2. Conceptual Operation Principle
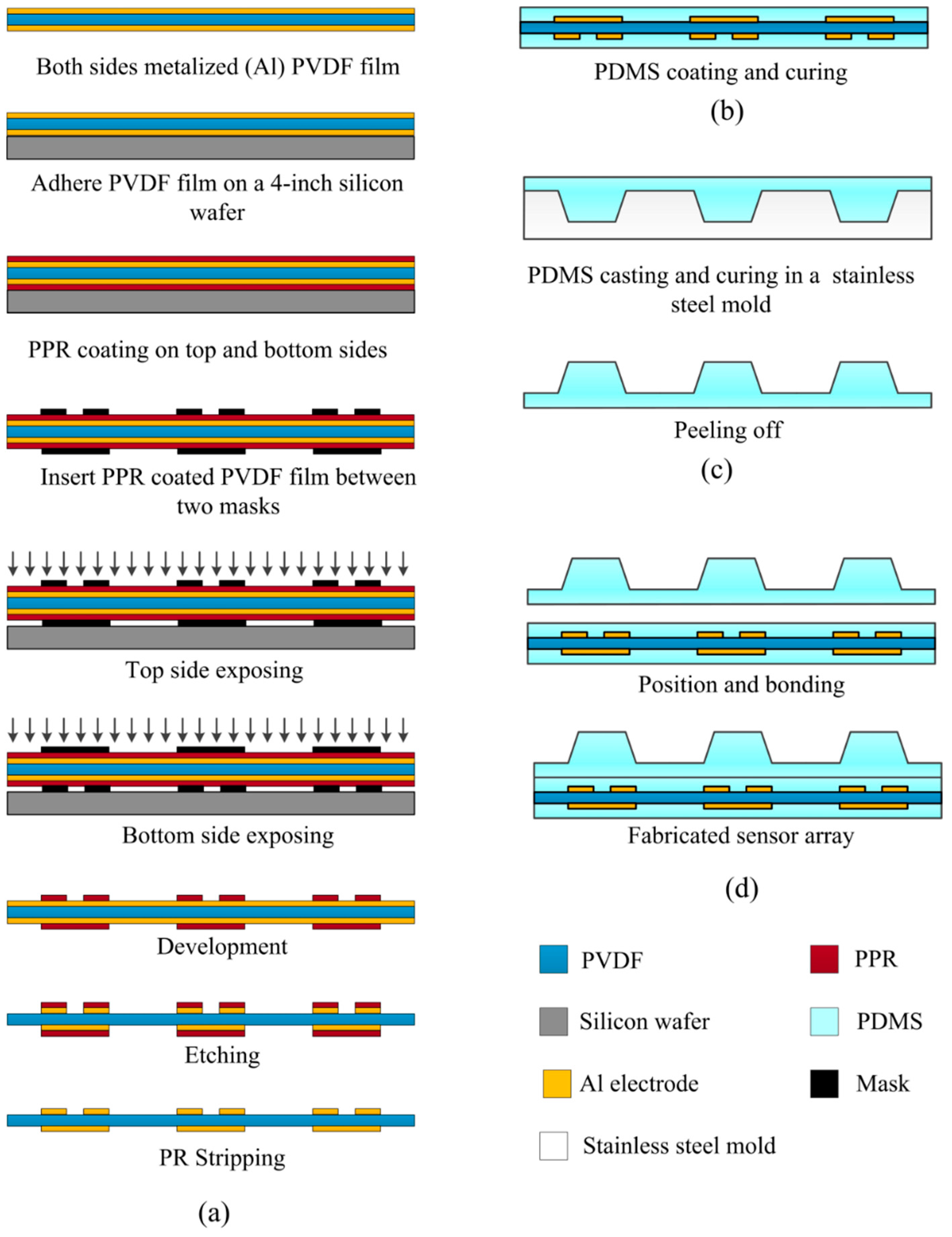
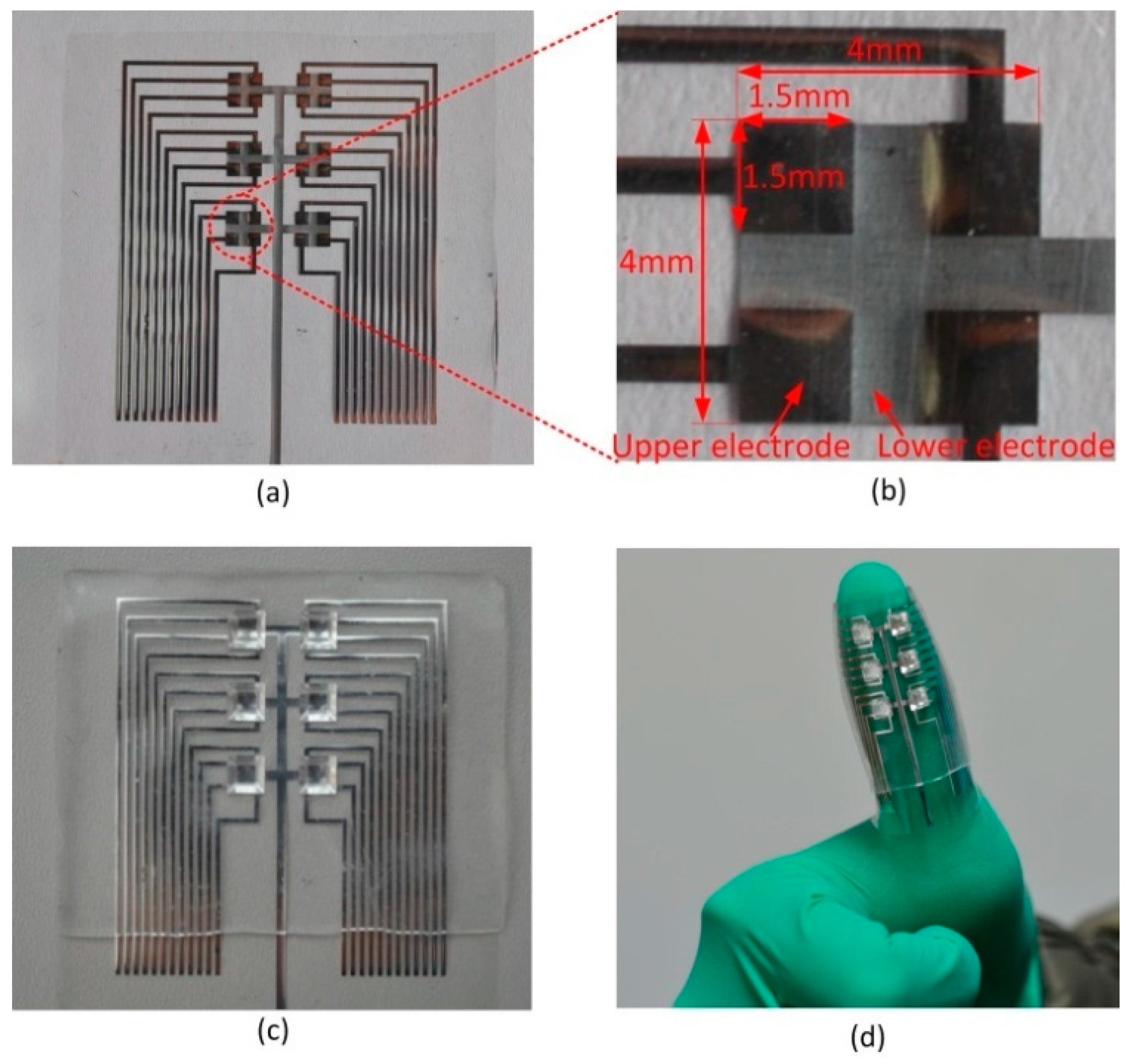
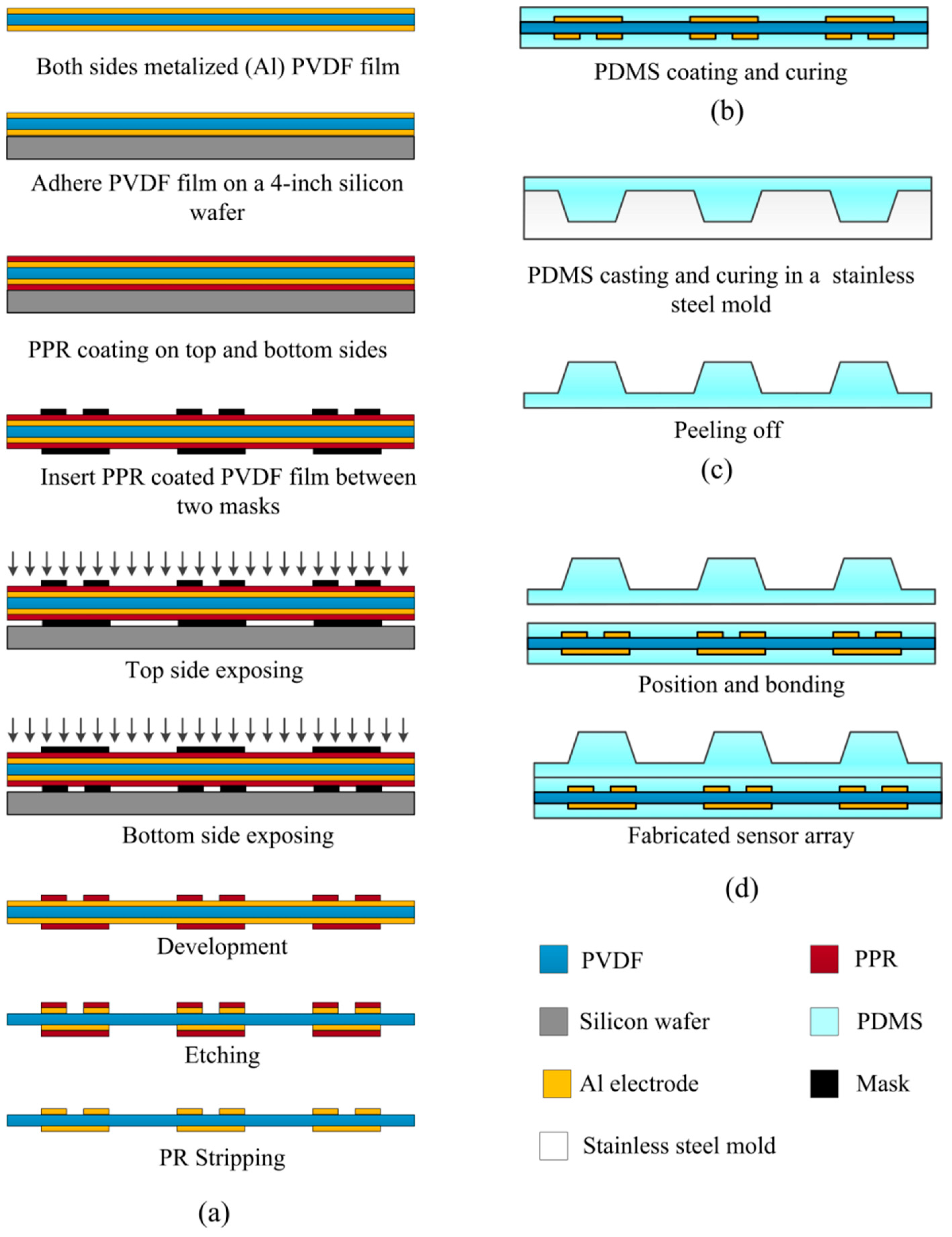
3. Fabrication
4. Measurements and Discussion
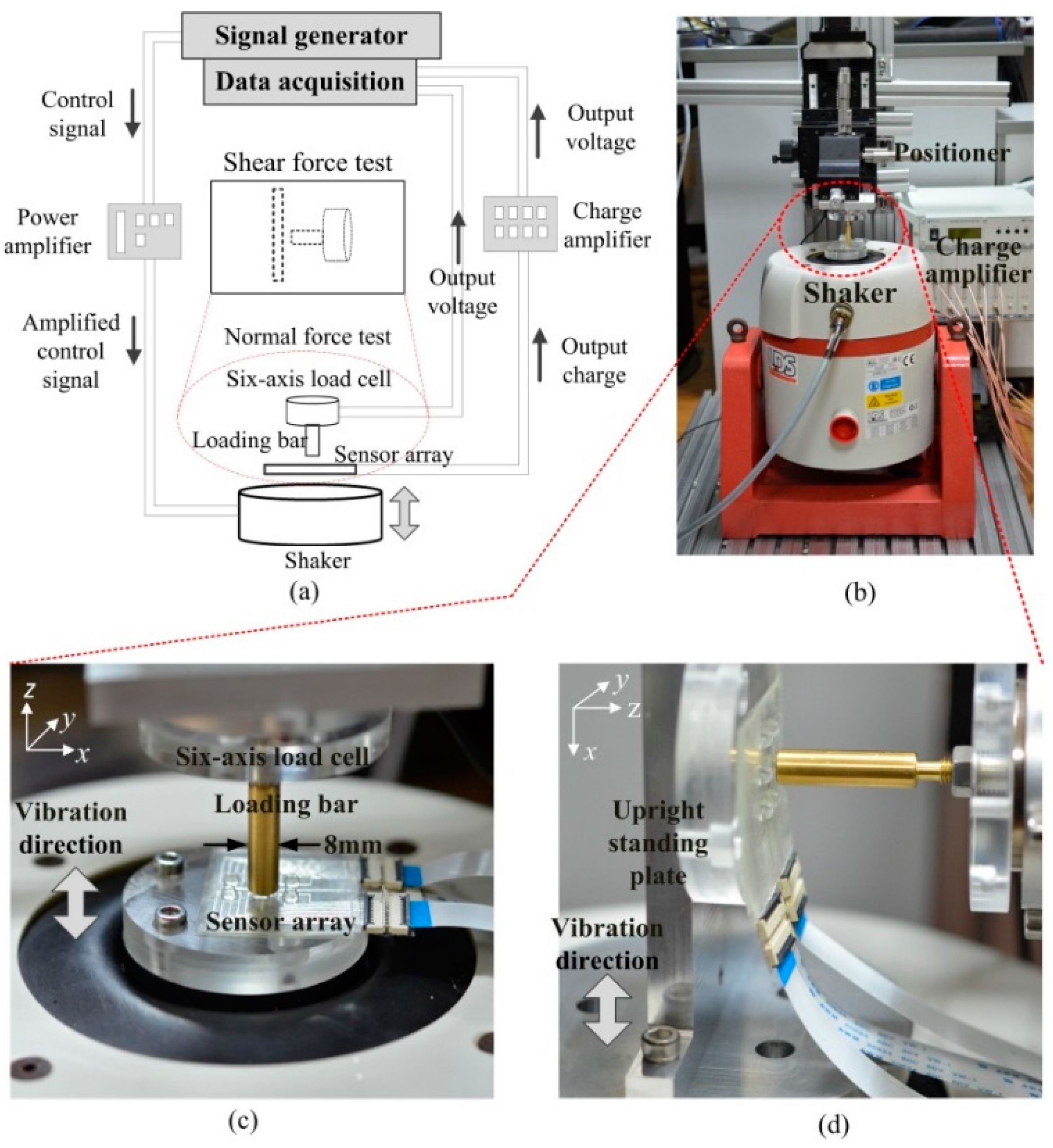
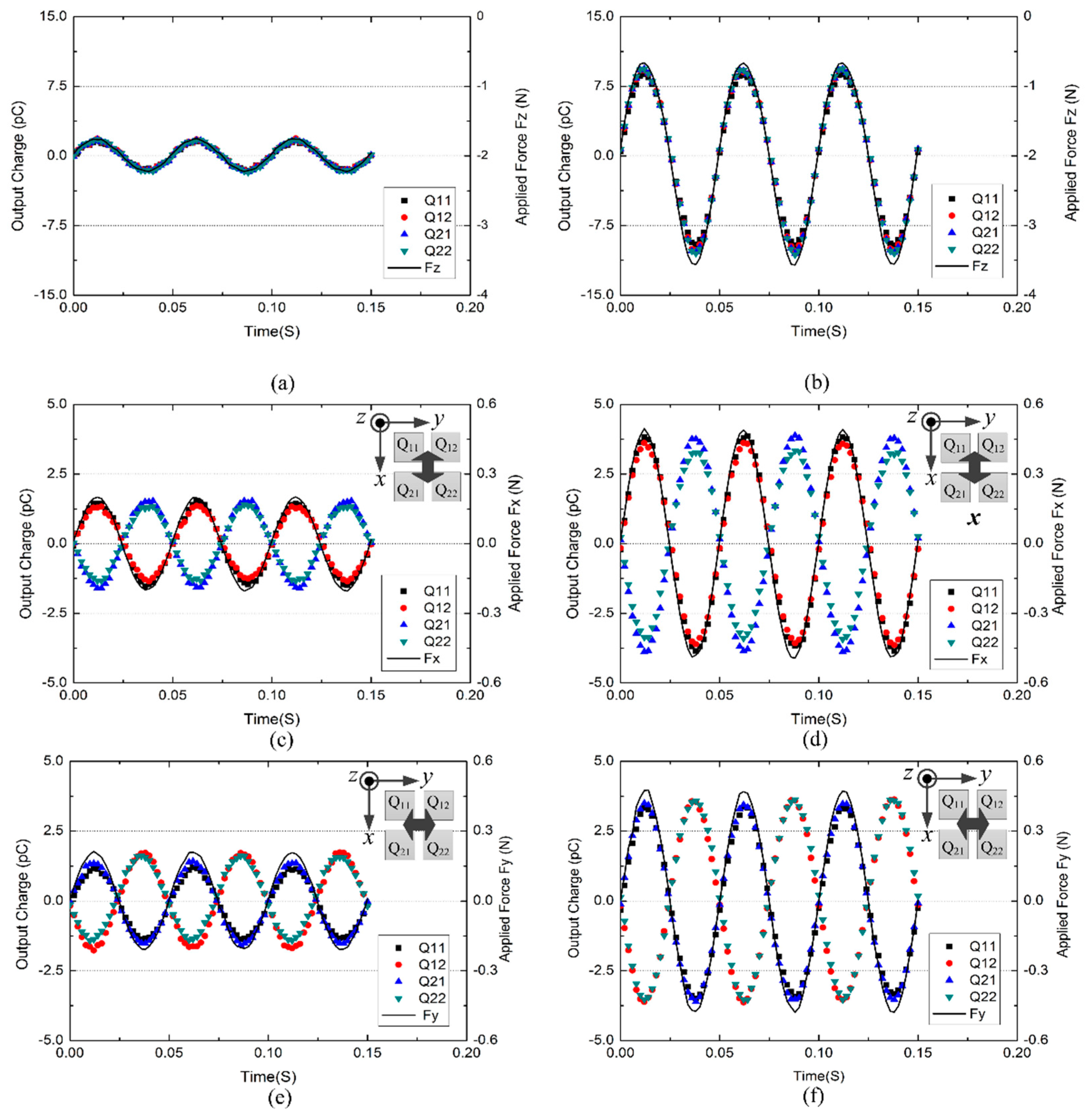
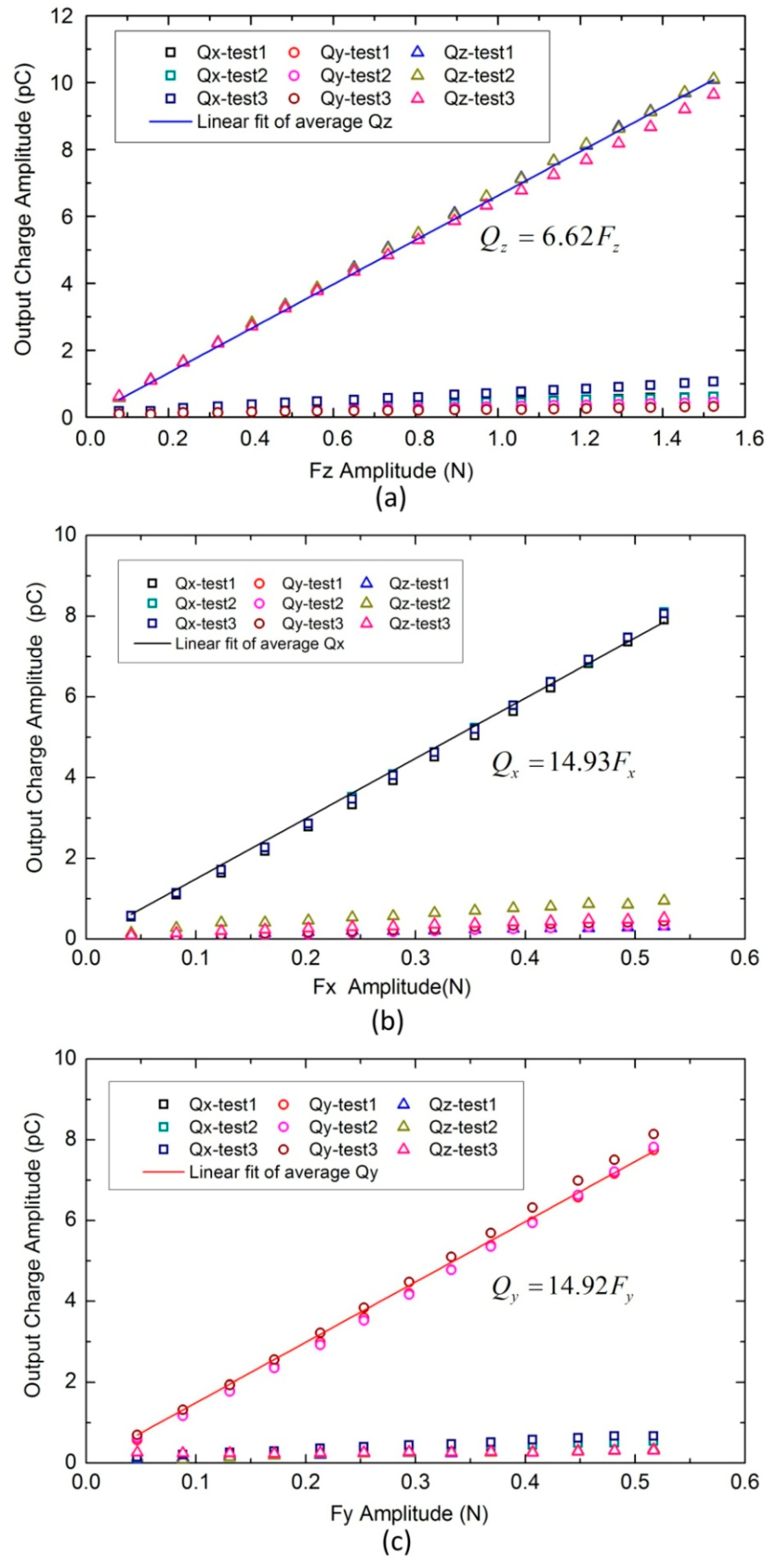
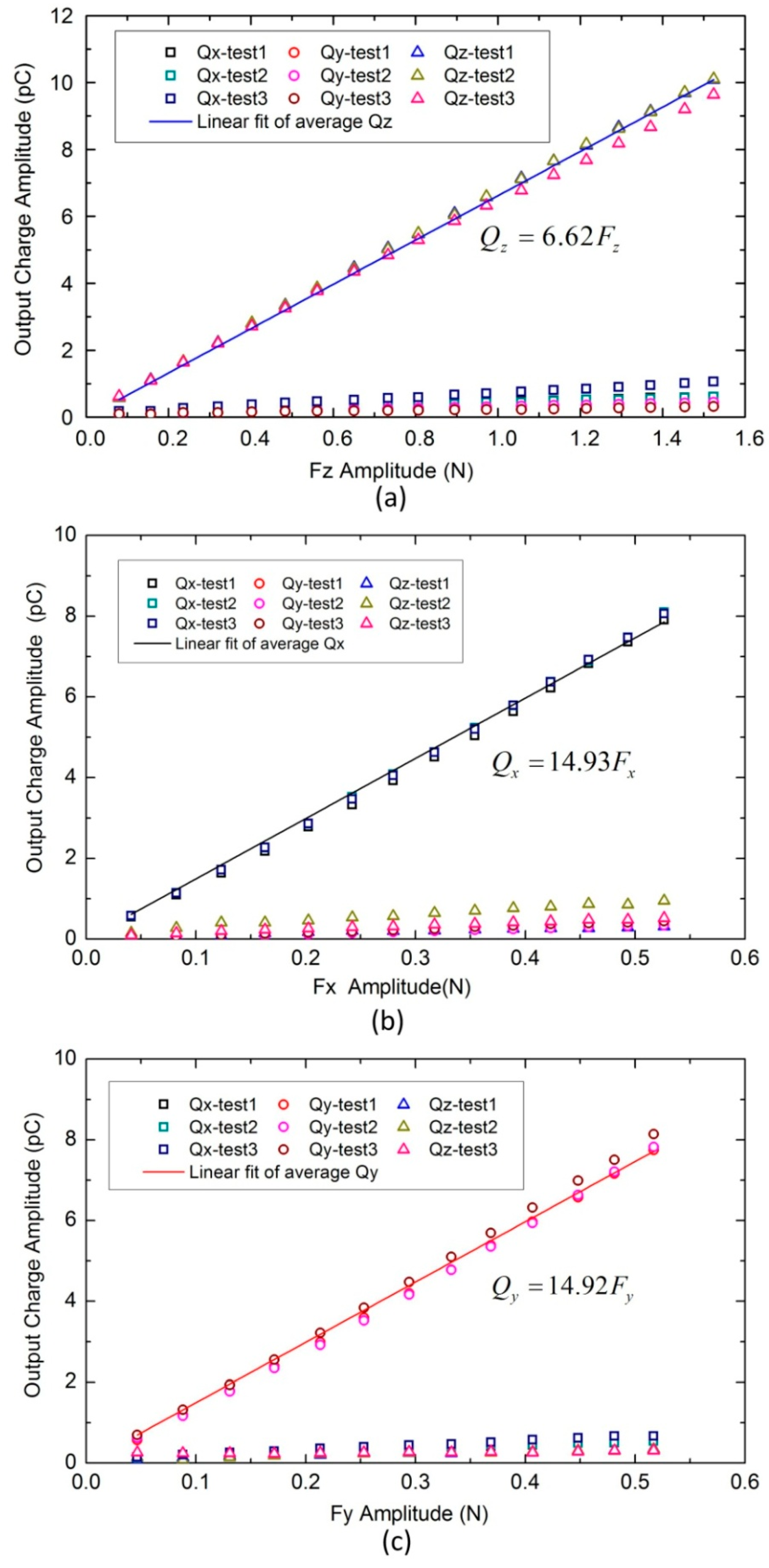
4.1. Sensor Unit Calibration
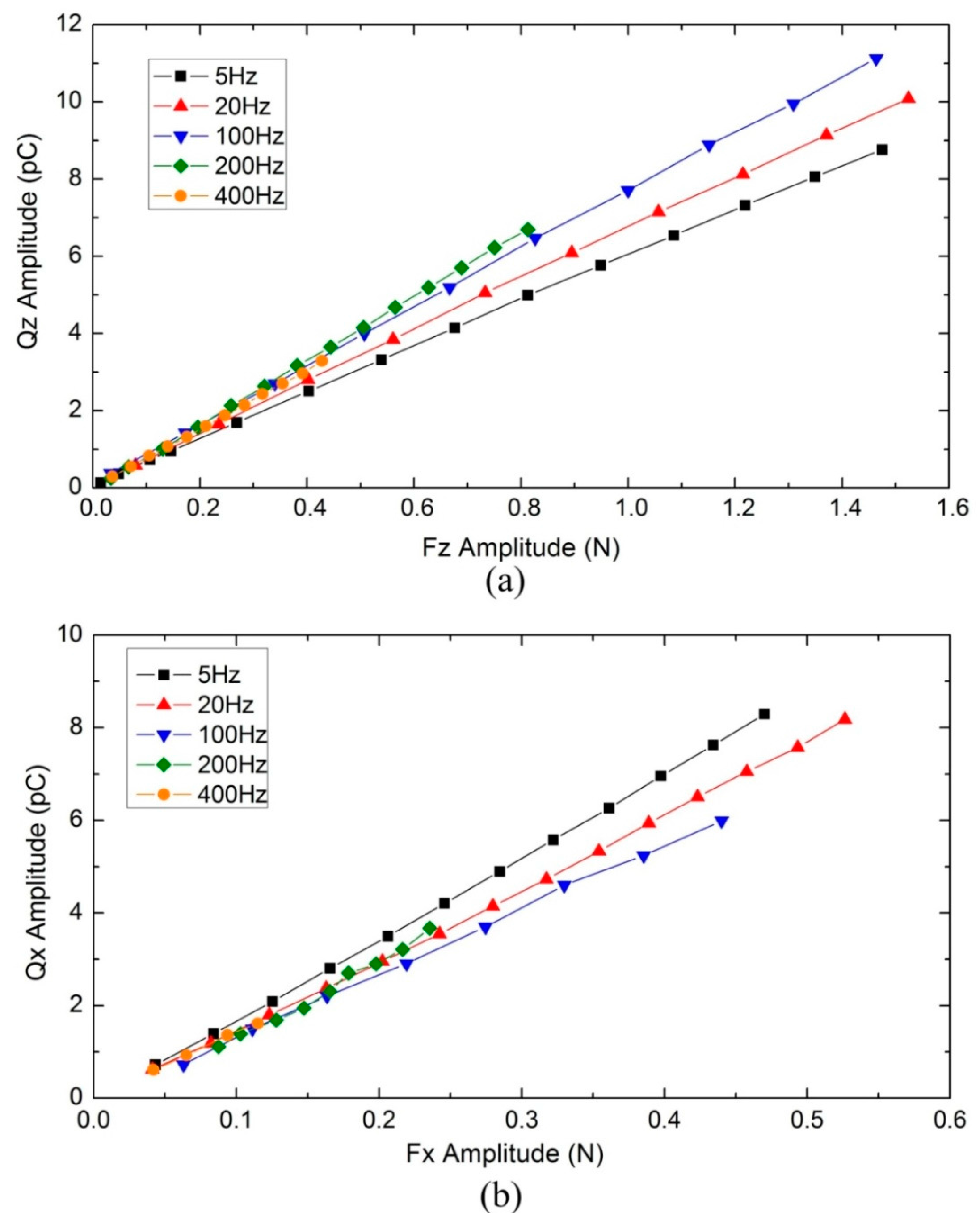
4.2. Frequency Effect Test
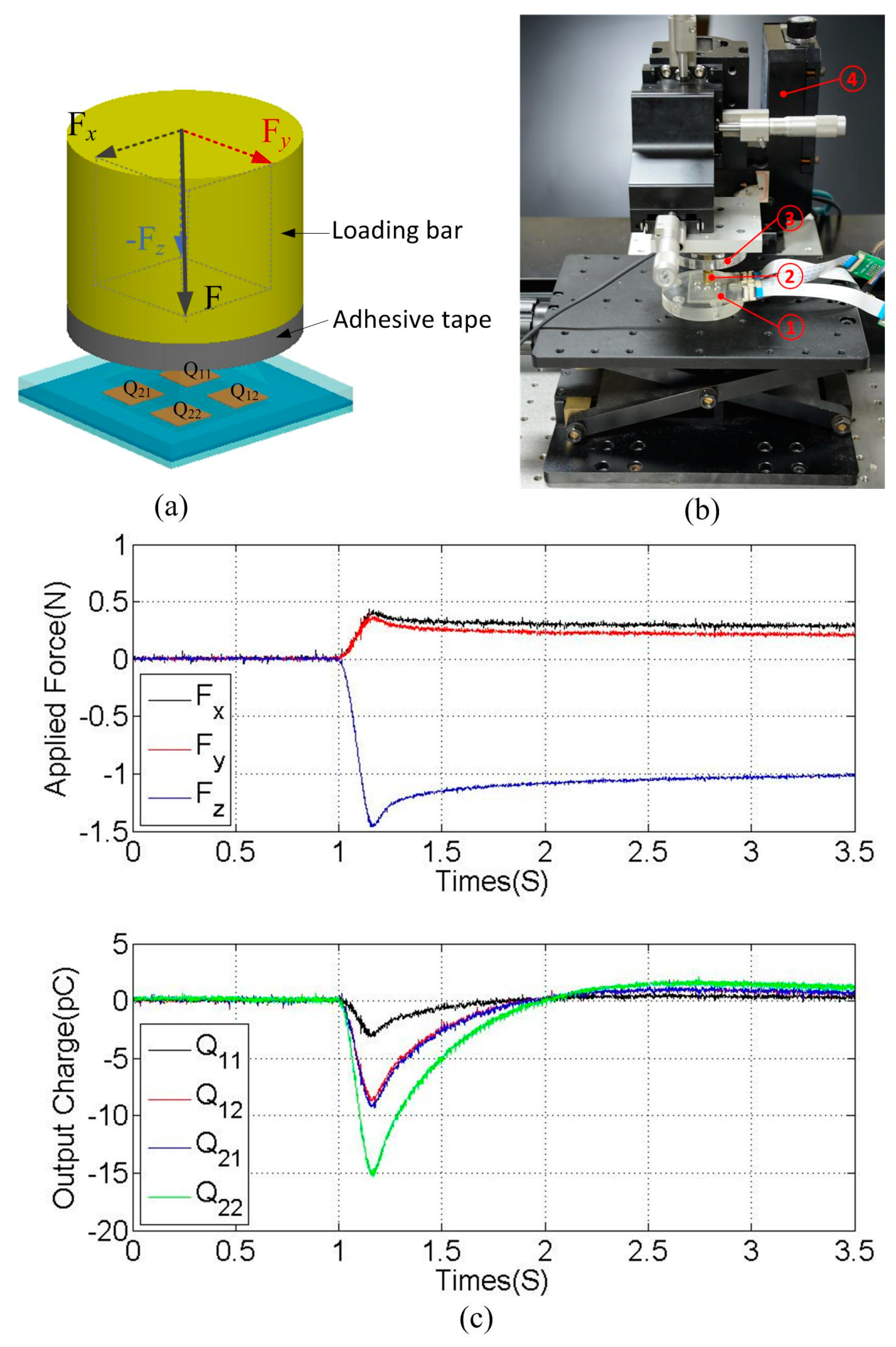
4.3. Dynamic Three-Axis Force Measurement
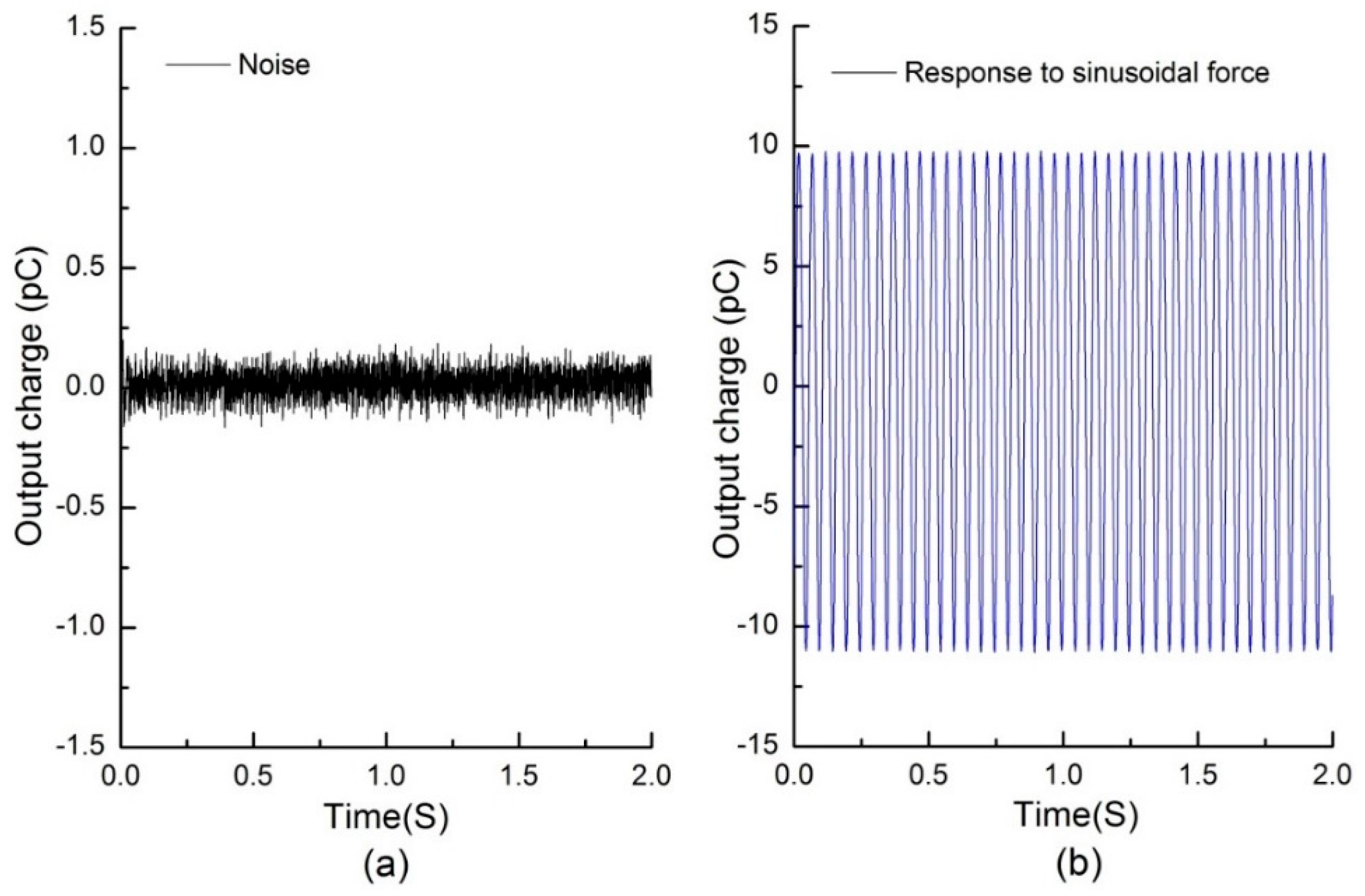
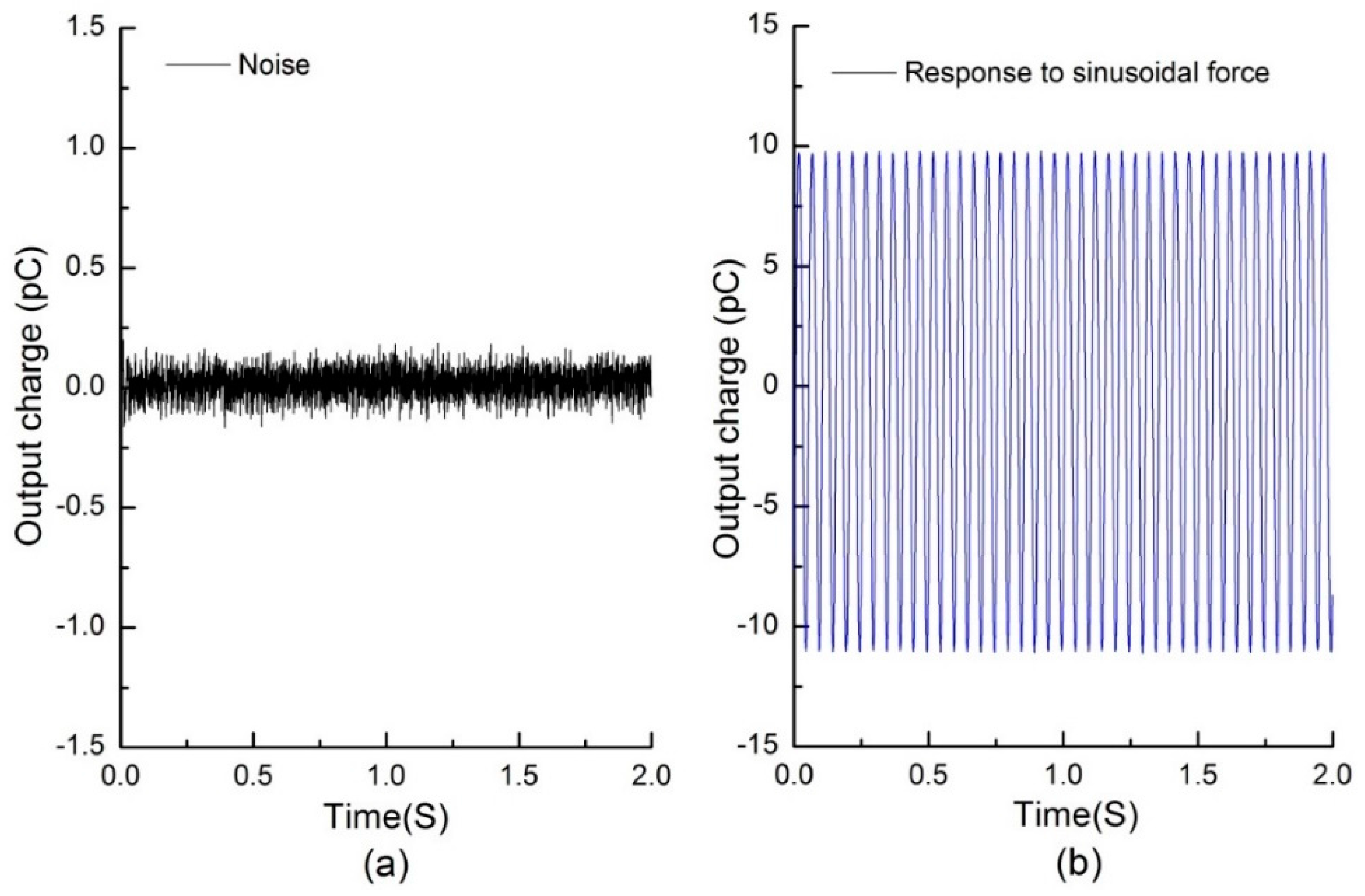
4.4. Signal-to-Noise Ratio (SNR) Analysis
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Johansson, R.S.; Flanagan, J.R. Coding and use of tactile signals from the fingertips in object manipulation tasks. Nat. Rev. Neurosci. 2009, 10, 345–359. [Google Scholar] [CrossRef] [PubMed]
- Yousef, H.; Boukallel, M.; Althoefer, K. Tactile sensing for dexterous in-hand manipulation in robotics-A review. Sens. Actuators A-Phys. 2011, 167, 171–187. [Google Scholar] [CrossRef]
- Kappassov, Z.; Corrales, J.-A.; Perdereau, V. Tactile sensing in dexterous robot hands-Review. Robot. Auton. Syst. 2015, 74, 195–220. [Google Scholar] [CrossRef]
- Oddo, C.M.; Beccai, L.; Felder, M.; Giovacchini, F.; Carrozza, M.C. Artificial roughness encoding with a bio-inspired MEMS-based tactile sensor array. Sensors 2009, 9, 3161–3183. [Google Scholar] [CrossRef] [PubMed]
- Koiva, R.; Zenker, M.; Schurmann, C.; Haschke, R.; Ritter, H.J. A highly sensitive 3D-shaped tactile sensor. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Wollongong, Australia, 9–12 July 2013; pp. 1084–1089.
- Dahiya, R.S.; Metta, G.; Valle, M.; Adami, A.; Lorenzelli, L. Piezoelectric oxide semiconductor field effect transistor touch sensing devices. Appl. Phys. Lett. 2009, 95, 034105. [Google Scholar] [CrossRef]
- Adami, A.; Dahiya, R.; Collini, C.; Cattin, D.; Lorenzelli, L. POSFET touch sensor with CMOS integrated signal conditioning electronics. Sens. Actuators A-Phys. 2012, 188, 75–81. [Google Scholar] [CrossRef]
- Chuang, C.-H.; Liou, Y.-R.; Chen, C.-W. Detection system of incident slippage and friction coefficient based on a flexible tactile sensor with structural electrodes. Sens. Actuators A-Phys. 2012, 188, 48–55. [Google Scholar] [CrossRef]
- Lee, H.-K.; Chung, J.; Chang, S.-I.; Yoon, E. Normal and shear force measurement using a flexible polymer tactile sensor with embedded multiple capacitors. J. Microelectromech. Syst. 2008, 17, 934–942. [Google Scholar]
- Liang, G.; Wang, Y.; Mei, D.; Xi, K.; Chen, Z. Flexible capacitive tactile sensor array with truncated pyramids as dielectric layer for Three-Axis force measurement. J. Microelectromech. Syst. 2015, 24, 1510–1519. [Google Scholar] [CrossRef]
- Iwasaki, T.; Takeshita, T.; Arinaga, Y.; Uemura, K.; Ando, H.; Takeuchi, S.; Furue, M.; Higurashi, E.; Sawada, R. Shearing force measurement device with a built–in integrated micro displacement sensor. Sens. Actuators A-Phys. 2015, 221, 1–8. [Google Scholar] [CrossRef]
- Ramadan, K.S.; Sameoto, D.; Evoy, S. A review of piezoelectric polymers as functional materials for electromechanical transducers. Smart. Mater. Struct. 2014, 23, 033001. [Google Scholar] [CrossRef]
- Shirafuji, S.; Hosoda, K. Detection and prevention of slip using sensors with different properties embedded in elastic artificial skin on the basis of previous experience. Robot. Auton. Syst. 2014, 62, 46–52. [Google Scholar] [CrossRef]
- Cutkosky, M.R.; Ulmen, J. Dynamic tactile sensing. In The Human Hand as an Inspiration for Robot Hand Development; Springer: Basel, Switzerland, 2014; pp. 389–403. [Google Scholar]
- Lee, H.-K.; Chang, S.-I.; Yoon, E. A flexible polymer tactile sensor: Fabrication and modular expandability for large area deployment. J. Microelectromech. Syst. 2006, 15, 1681–1686. [Google Scholar] [CrossRef]
- Kolesar, E.S.; Dyson, C.S. Object imaging with a piezoelectric robotic tactile sensor. J. Microelectromech. S. 1995, 4, 87–96. [Google Scholar] [CrossRef]
- Seminara, L.; Pinna, L.; Valle, M.; Basiricò, L.; Loi, A.; Cosseddu, P.; Bonfiglio, A.; Ascia, A.; Biso, M.; Ansaldo, A. Piezoelectric polymer transducer arrays for flexible tactile sensors. IEEE Sens. J. 2013, 13, 4022–4029. [Google Scholar] [CrossRef]
- Choi, B.; Choi, H.R.; Kang, S. Development of tactile sensor for detecting contact force and slip. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 2638–2643.
- Drimus, A.; Petersen, M.B.; Bilberg, A. Object texture recognition by dynamic tactile sensing using active exploration. In Proceedings of the 21st IEEE International Symposium on Robot and Human Interactive Communication, Paris, France, 9–13 September 2012; pp. 277–283.
- Wakatsuki, N.; Kagawa, Y.; Haba, M. Tri-axial sensors and actuators made of a single piezoelectric cylindrical shell. IEEE Sens. J. 2004, 4, 102–107. [Google Scholar] [CrossRef]
- Zhang, T.; Liu, H.; Jiang, L.; Fan, S.; Yang, J. Development of a flexible 3–D tactile sensor system for anthropomorphic artificial hand. IEEE Sens. J. 2013, 13, 510–518. [Google Scholar] [CrossRef]
- Rajala, S.; Tuukkanen, S.; Halttunen, J. Characteristics of piezoelectric polymer film sensors with solution-processable graphene-based electrode materials. IEEE Sens. J. 2015, 15, 3102–3109. [Google Scholar] [CrossRef]
- Dahiya, R.S.; Valle, M.; Lorenzelli, L. SPICE model for lossy piezoelectric polymers. IEEE Trans. Ultroson. Ferr. 2009, 56, 387–395. [Google Scholar] [CrossRef] [PubMed]
- Dargahi, J.; Parameswaran, M.; Payandeh, S. A micromachined piezoelectric tactile sensor for an endoscopic grasper–theory, fabrication and experiments. J. Microelectromech. Syst. 2000, 9, 329–335. [Google Scholar] [CrossRef]
- Piezotech, S.A.S. Piezoelectric Films Technical Information. Technical Manual. Available online: http://www.piezotech.fr/ (accessed on 20 March 2016).
- Raj, D.V.; Ingty, K.; Devanandan, M. Weight appreciation in the hand in normal subjects and in patients with leprous neuropathy. Brain 1985, 108, 95–102. [Google Scholar] [CrossRef] [PubMed]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tactile Unit | Fx | Fy | Fz | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Appl. | Calc. | |Err.| | Appl. | Calc. | |Err.| | Appl. | Calc. | |Err.| | |
| (N) | (N) | (%) | (N) | (N) | (%) | (N) | (N) | (%) | |
| U11 | 0.16 | 0.15 | 6.25 | 0.22 | 0.19 | 13.64 | −0.595 | −0.55 | 7.56 |
| U11 | 0.34 | 0.29 | 14.71 | 0.33 | 0.30 | 9.09 | −0.95 | −0.885 | 6.84 |
| U12 | 0.08 | 0.11 | 37.50 | 0.32 | 0.30 | 6.25 | −0.695 | −0.655 | 5.76 |
| U12 | 0.40 | 0.42 | 5.00 | 0.36 | 0.39 | 8.33 | −1.45 | −1.35 | 6.90 |
| U21 | 0.23 | 0.19 | 17.39 | 0.08 | 0.05 | 37.50 | −0.545 | −0.495 | 9.17 |
| U21 | 0.12 | 0.14 | 16.67 | 0.45 | 0.49 | 8.89 | −1.02 | −0.92 | 9.80 |
| U22 | 0.43 | 0.46 | 6.98 | 0.41 | 0.43 | 4.88 | −1.32 | −1.2 | 9.09 |
| U22 | 0.34 | 0.30 | 11.76 | 0.12 | 0.14 | 16.67 | −0.745 | −0.63 | 15.44 |
| U31 | 0.15 | 0.16 | 6.67 | 0.19 | 0.17 | 10.53 | −0.475 | −0.38 | 20.00 |
| U31 | 0.21 | 0.22 | 4.76 | 0.44 | 0.39 | 11.36 | −0.99 | −1.05 | 6.06 |
| U32 | 0.44 | 0.45 | 2.27 | 0.16 | 0.15 | 6.25 | −0.96 | −0.89 | 7.29 |
| U32 | 0.20 | 0.19 | 5.00 | 0.29 | 0.30 | 3.45 | −0.73 | −0.665 | 8.90 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, P.; Liu, W.; Gu, C.; Cheng, X.; Fu, X. Flexible Piezoelectric Tactile Sensor Array for Dynamic Three-Axis Force Measurement. Sensors 2016, 16, 819. https://doi.org/10.3390/s16060819
Yu P, Liu W, Gu C, Cheng X, Fu X. Flexible Piezoelectric Tactile Sensor Array for Dynamic Three-Axis Force Measurement. Sensors. 2016; 16(6):819. https://doi.org/10.3390/s16060819
Chicago/Turabian StyleYu, Ping, Weiting Liu, Chunxin Gu, Xiaoying Cheng, and Xin Fu. 2016. "Flexible Piezoelectric Tactile Sensor Array for Dynamic Three-Axis Force Measurement" Sensors 16, no. 6: 819. https://doi.org/10.3390/s16060819
APA StyleYu, P., Liu, W., Gu, C., Cheng, X., & Fu, X. (2016). Flexible Piezoelectric Tactile Sensor Array for Dynamic Three-Axis Force Measurement. Sensors, 16(6), 819. https://doi.org/10.3390/s16060819