
GLORI: A GNSS-R Dual Polarization Airborne Instrument for Land Surface Monitoring

 ,
,  , ,
, ,  , , ,
, , , 
Abstract
:
1. Introduction
2. The GLORI GNSS Reflectometry Instrument
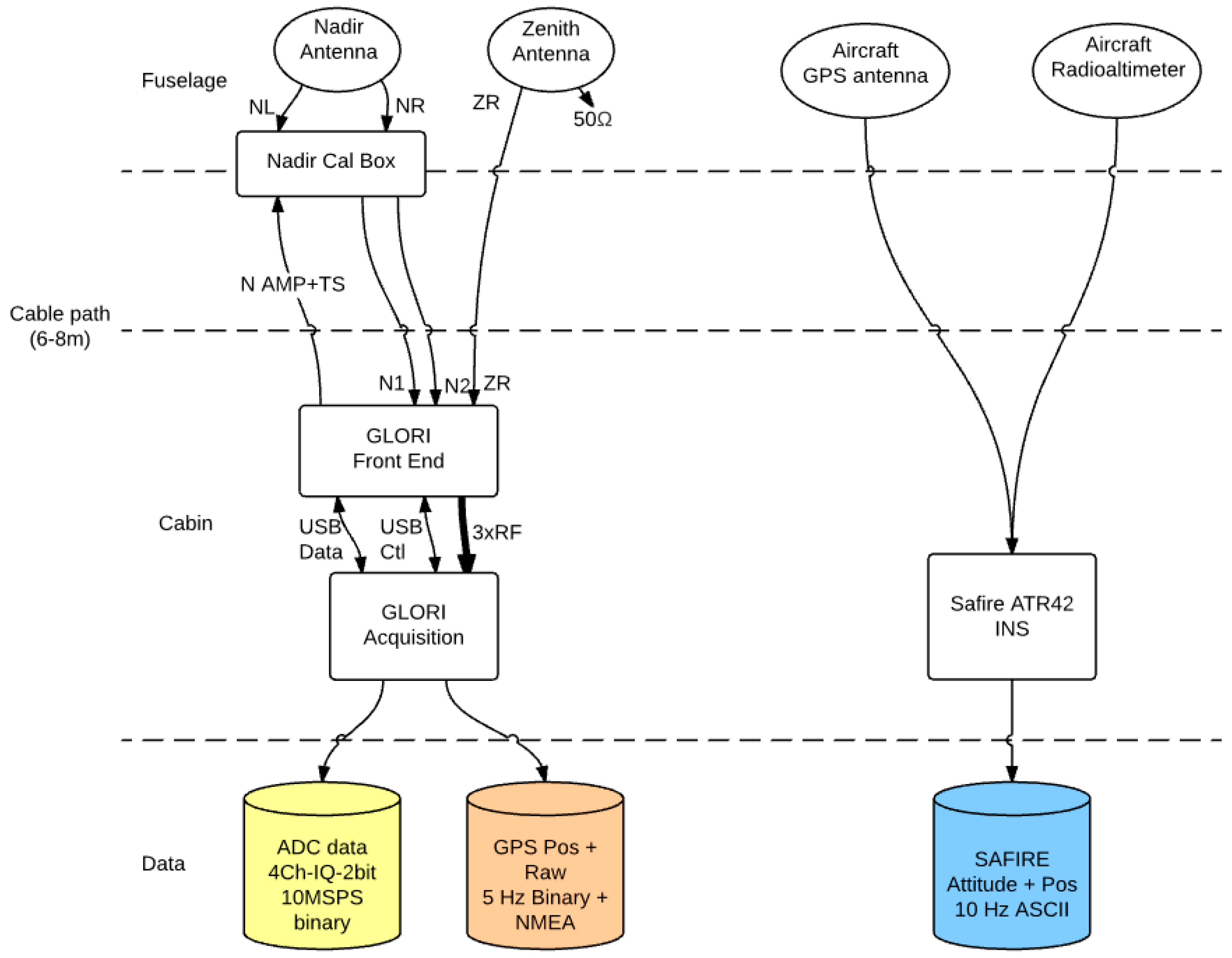
2.1. General System Description
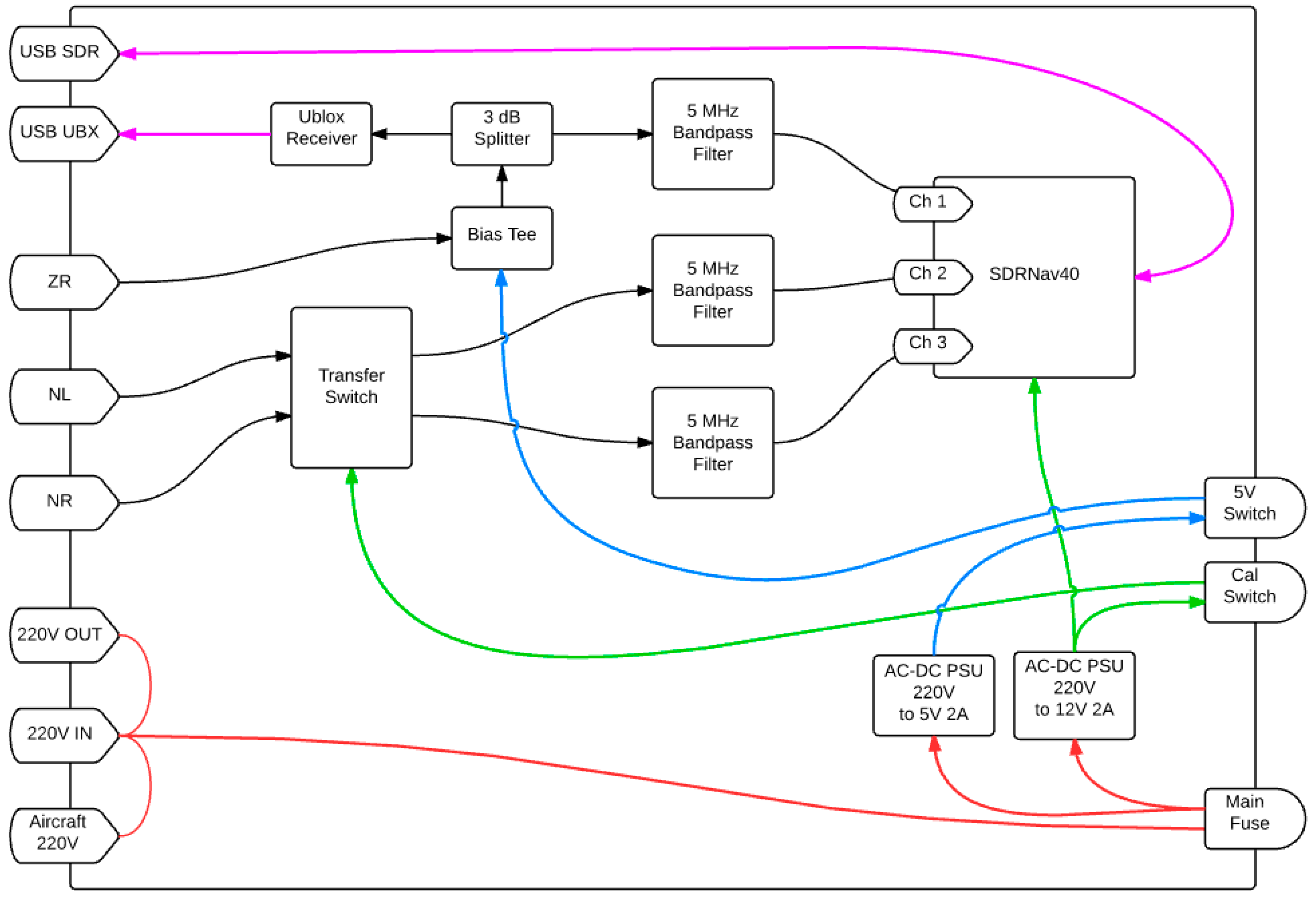
2.2. Instrument Design Details
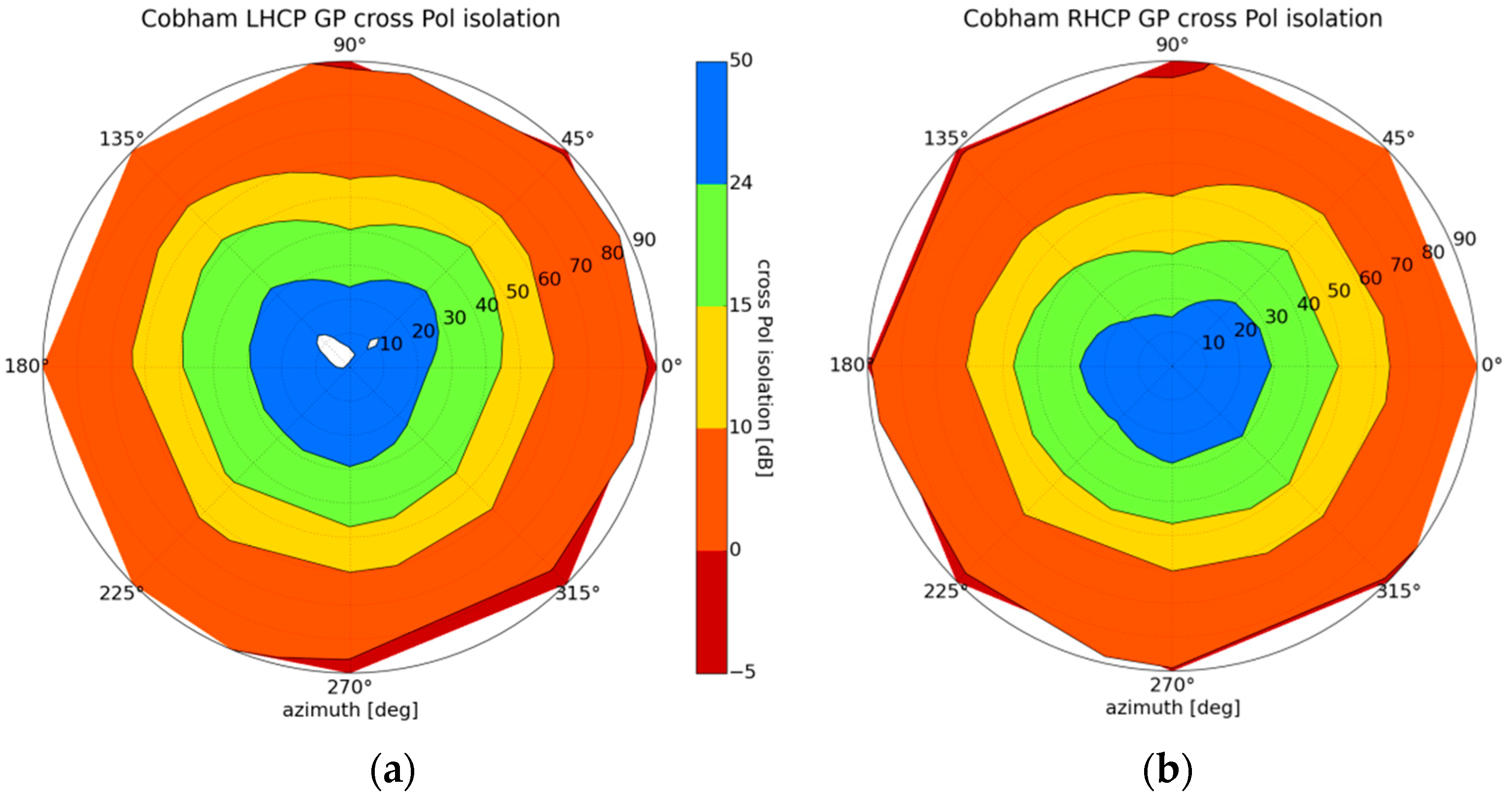
2.2.1. Antennas
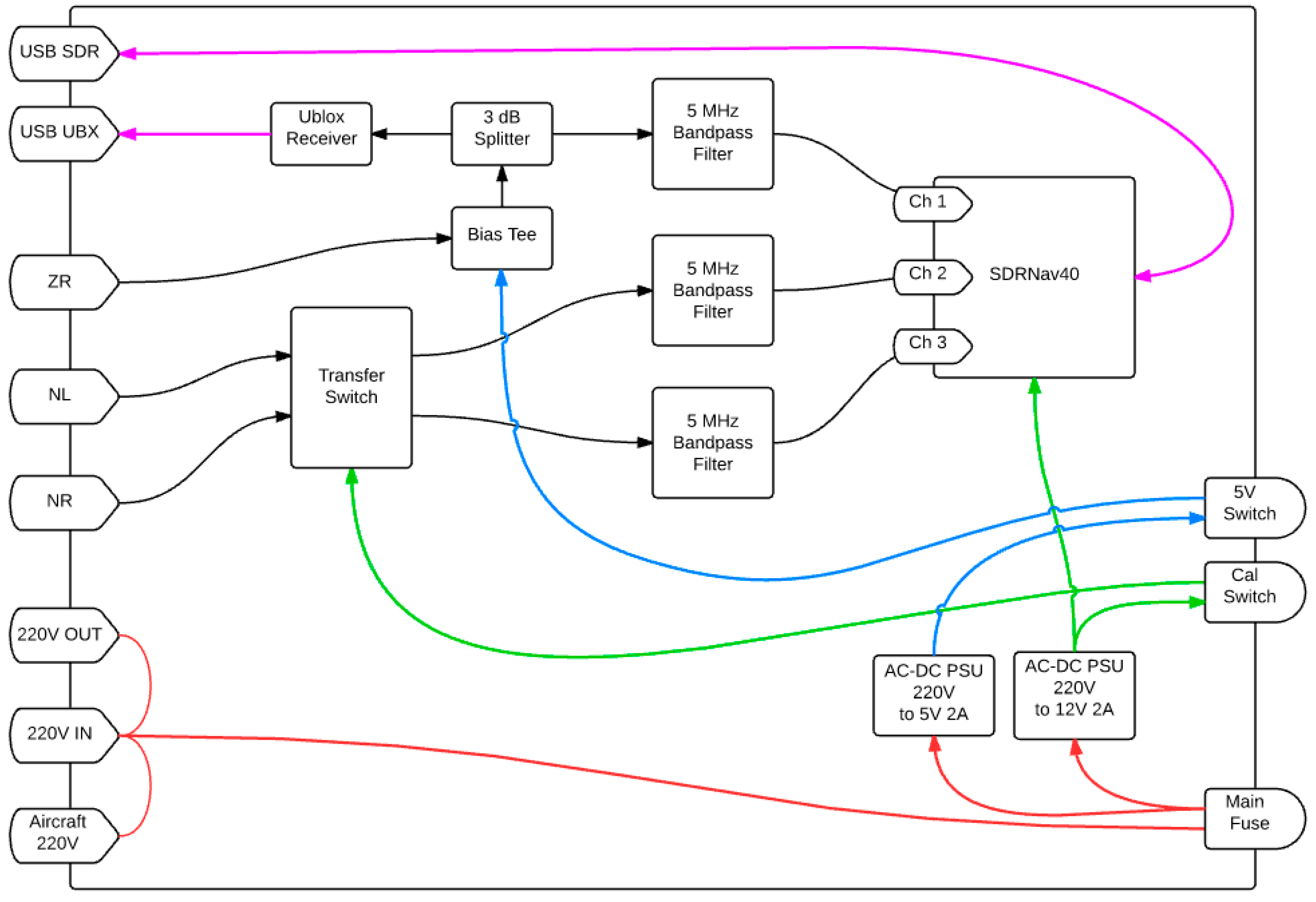
2.2.2. Front End
2.2.3. Acquisition Unit
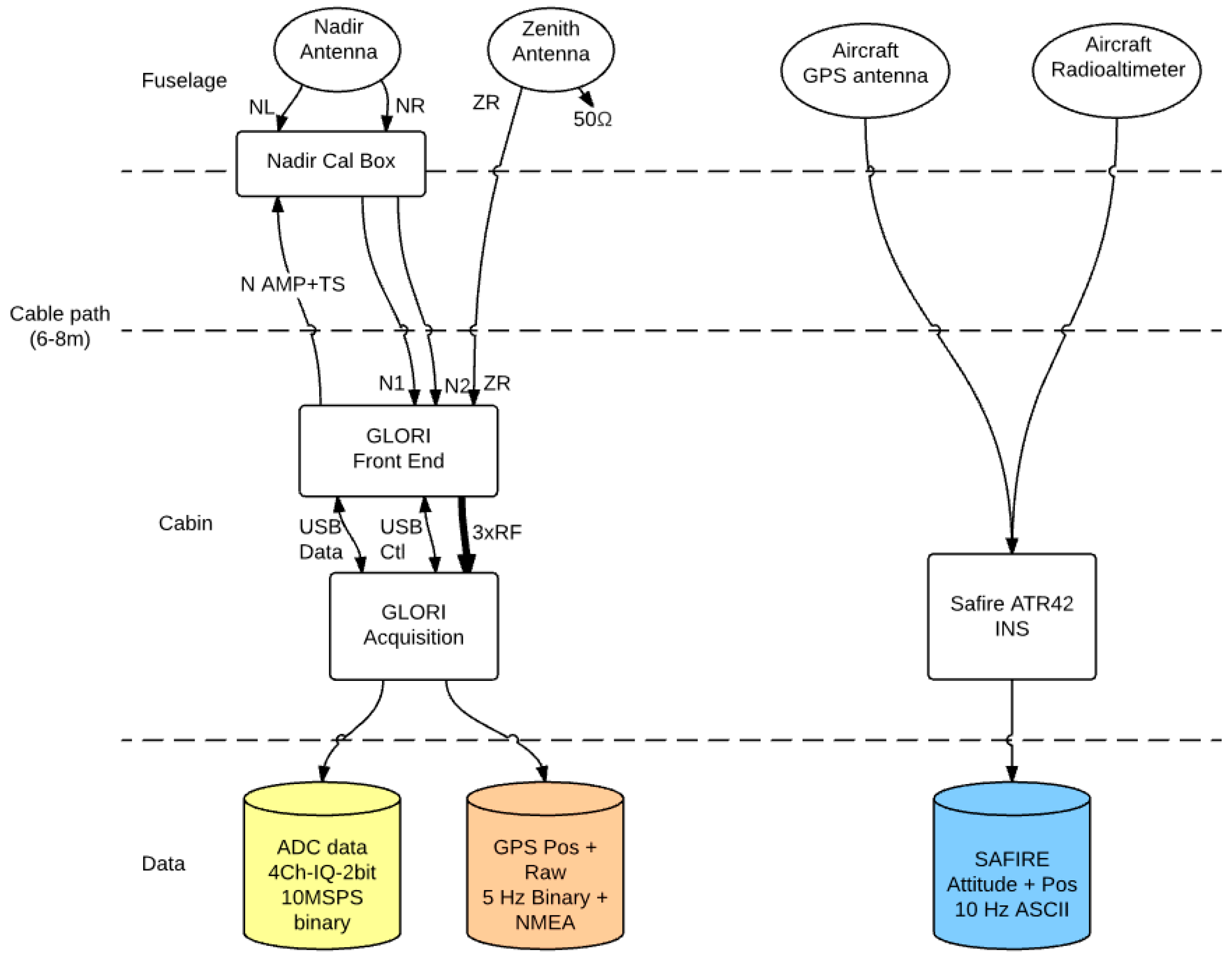
2.2.4. Auxiliary sensors
- The aircraft’s distance from the ground, using a 4.2–4.4 GHz Thomson ERT 900 Radio Altimeter with an accuracy of approximately 2%.
- Attitude and position information using the aircraft’s integrated Inertial Navigation System (Ixblue AirINS [36]) (GPS time, GPS altitude, latitude and longitude, heading, pitch, roll, and 3-axis speed).
- GPS Position derived from a Ublox Neo6T receiver [37] connected to the Zenith RHCP antenna, which records the aircraft’s position and GPS information (relative elevation and azimuth, code phase, Doppler frequency, signal to noise ratio, pseudo-range) at a frequency of 5 Hz.
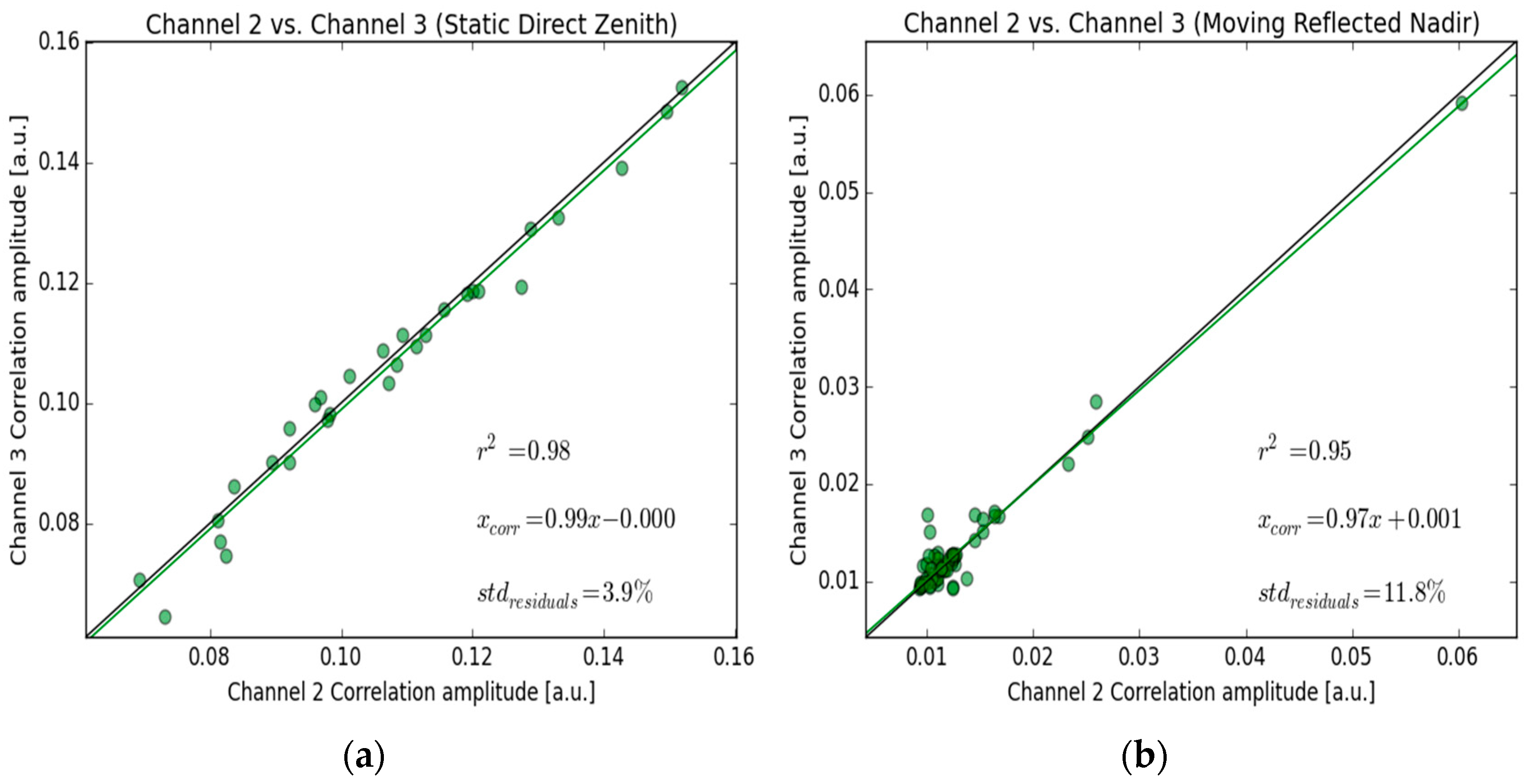
2.3. Instrumental Performance
Channel Cross-Calibration
3. The GLORI Campaigns
3.1. Overview
- The GLORI 2014 campaign was a flight of opportunity, originally planned for the validation of KuROS, a Ku band Doppler scatterometer developed in preparation for the CFOSAT satellite mission [9]. The flight plan was not optimized for reflectometry studies, nor for the collection of ground truth data. The aim of this campaign was to test the instrument’s in-flight performance.
- The GLORI 2015 campaign lasted for a period of three weeks, and was dedicated to GNSS reflectometry over land, associated with simultaneous, collocated ground-truth measurements.
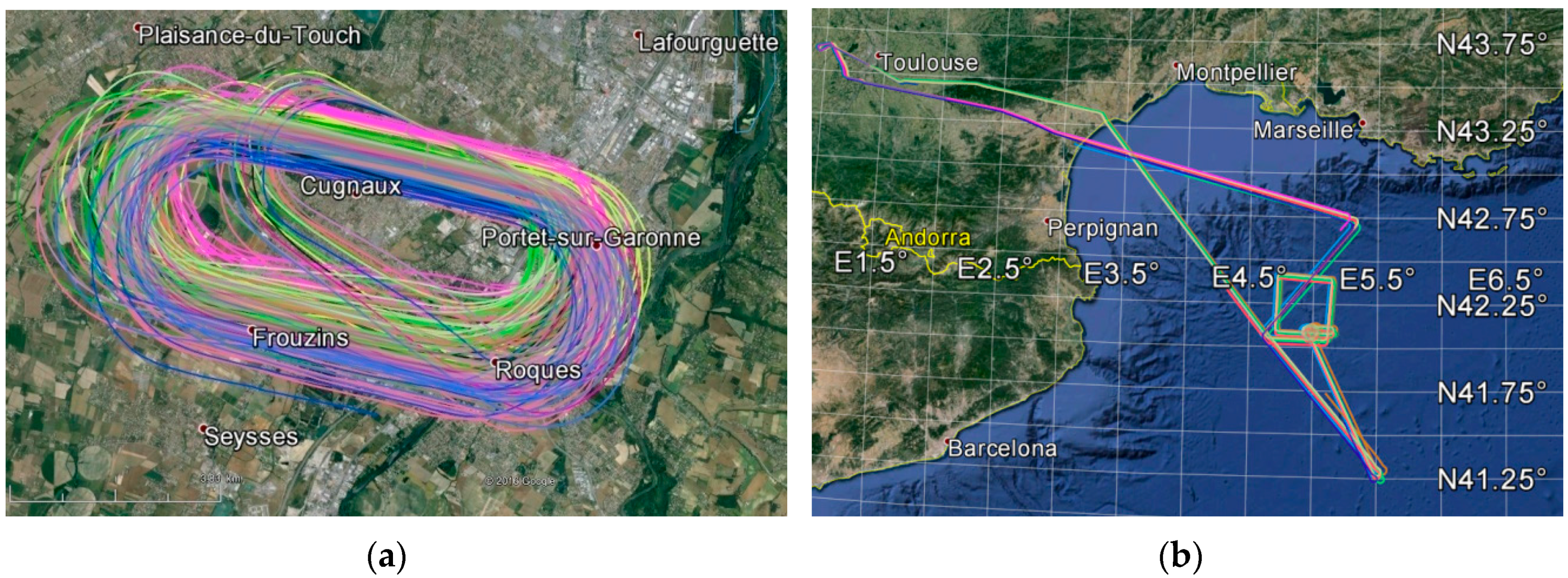
3.2. GLORI 2014 Campaign
- Two racetrack-type flights were made over the Francazal airport area: Flights 2014-39, (44 min of recorded data) and 2014-41, (31 min of recorded data), at a constant altitude of approximately 450 m above the surface.
- Flight 2014-40 was made over the Gulf of Lyon, during which 3 h and 43 min of data were recorded, in order to calibrate the KuROS scatterometer [38] at two different altitudes: 2000 m and 3000 m.
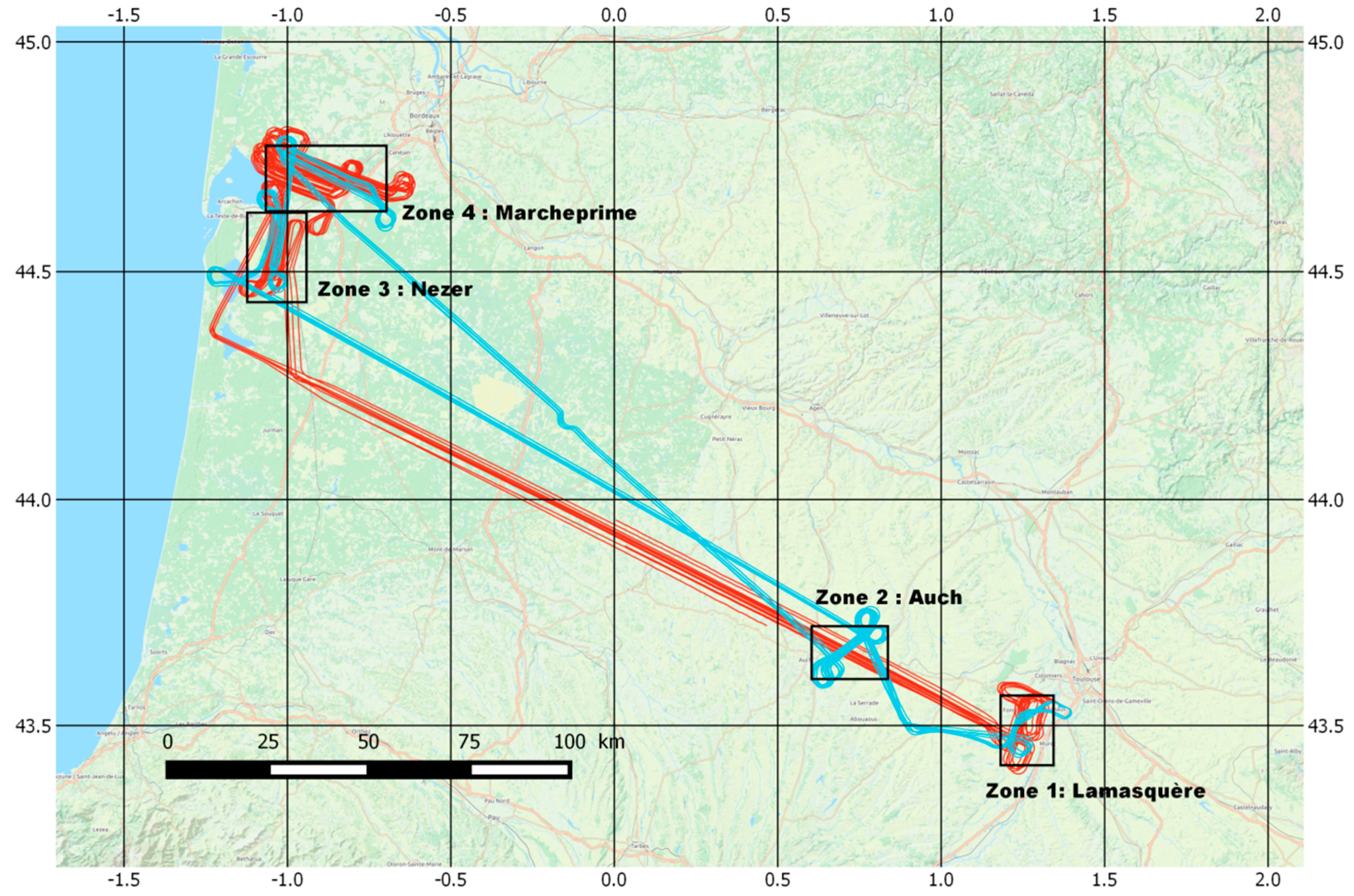
3.3. GLORI 2015 Campaign
3.3.1. Flight Plan
- Type A flights (short): ~2 h and 15 min daytime flights, focusing mainly on agricultural areas.
- Type B flights (long): ~3 h 15 min night flights, focusing mainly on forest-covered areas.
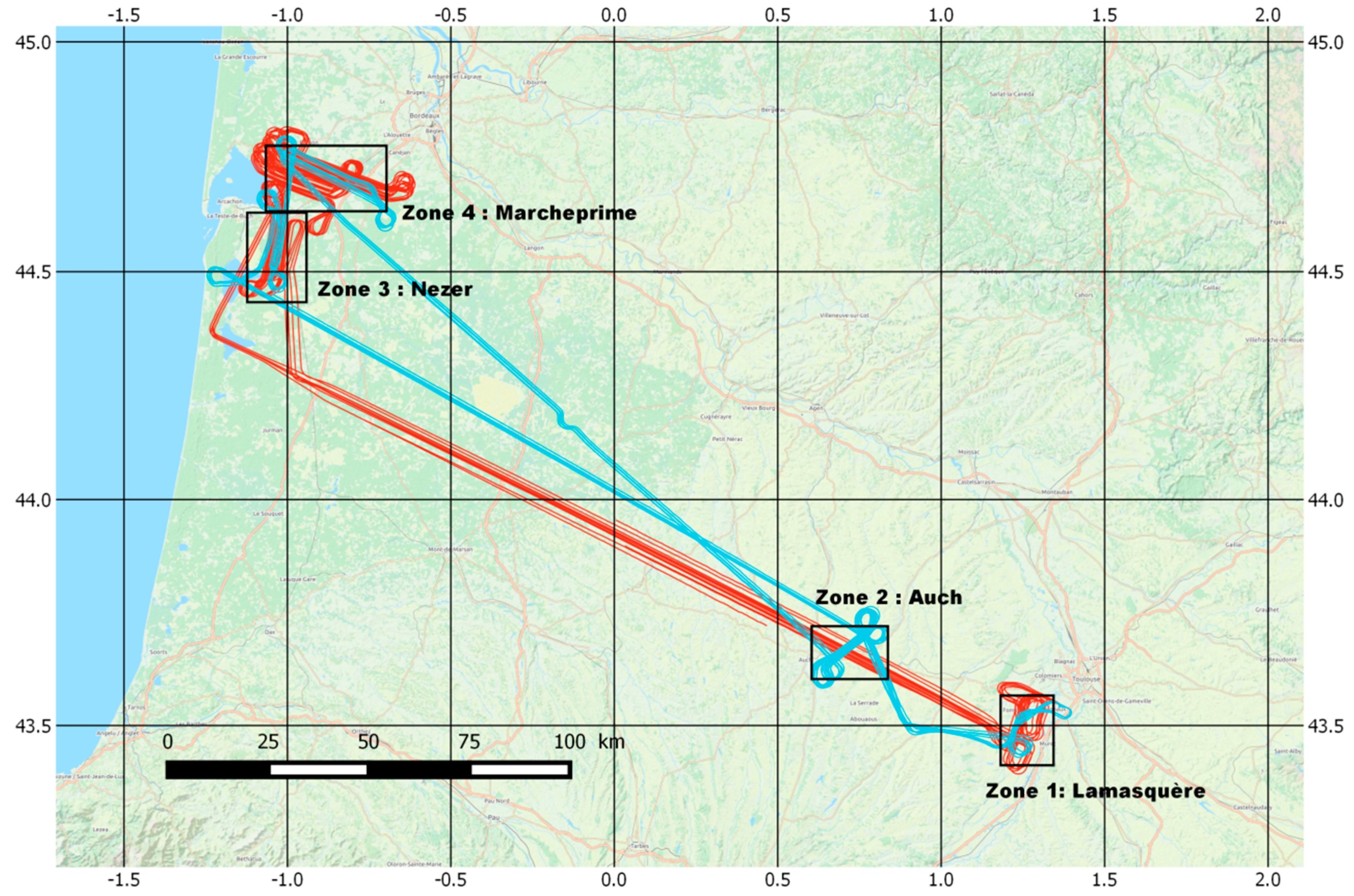
3.3.2. Validation Sites
4. GLORI Airborne Data Processing
4.1. Observed Variables
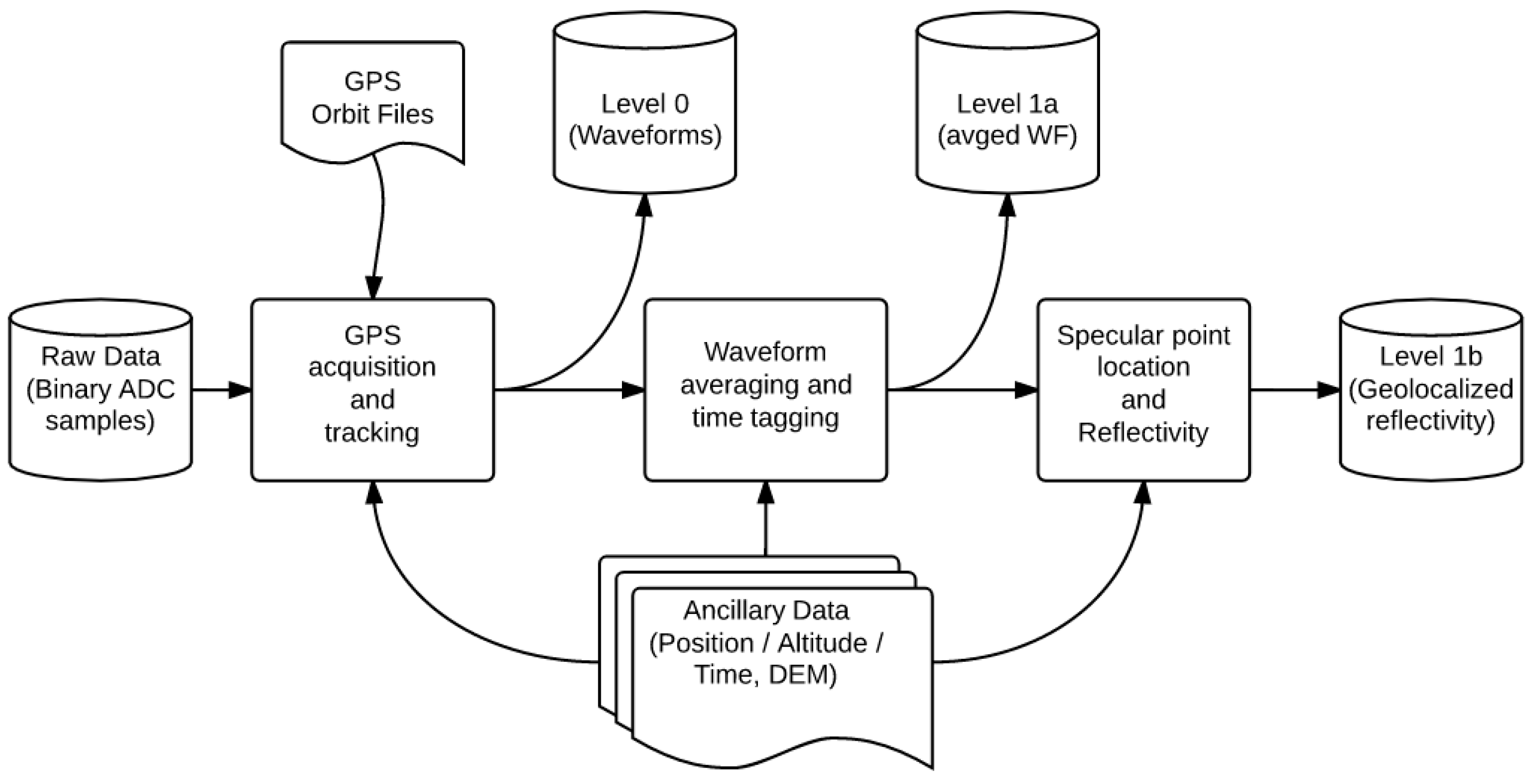
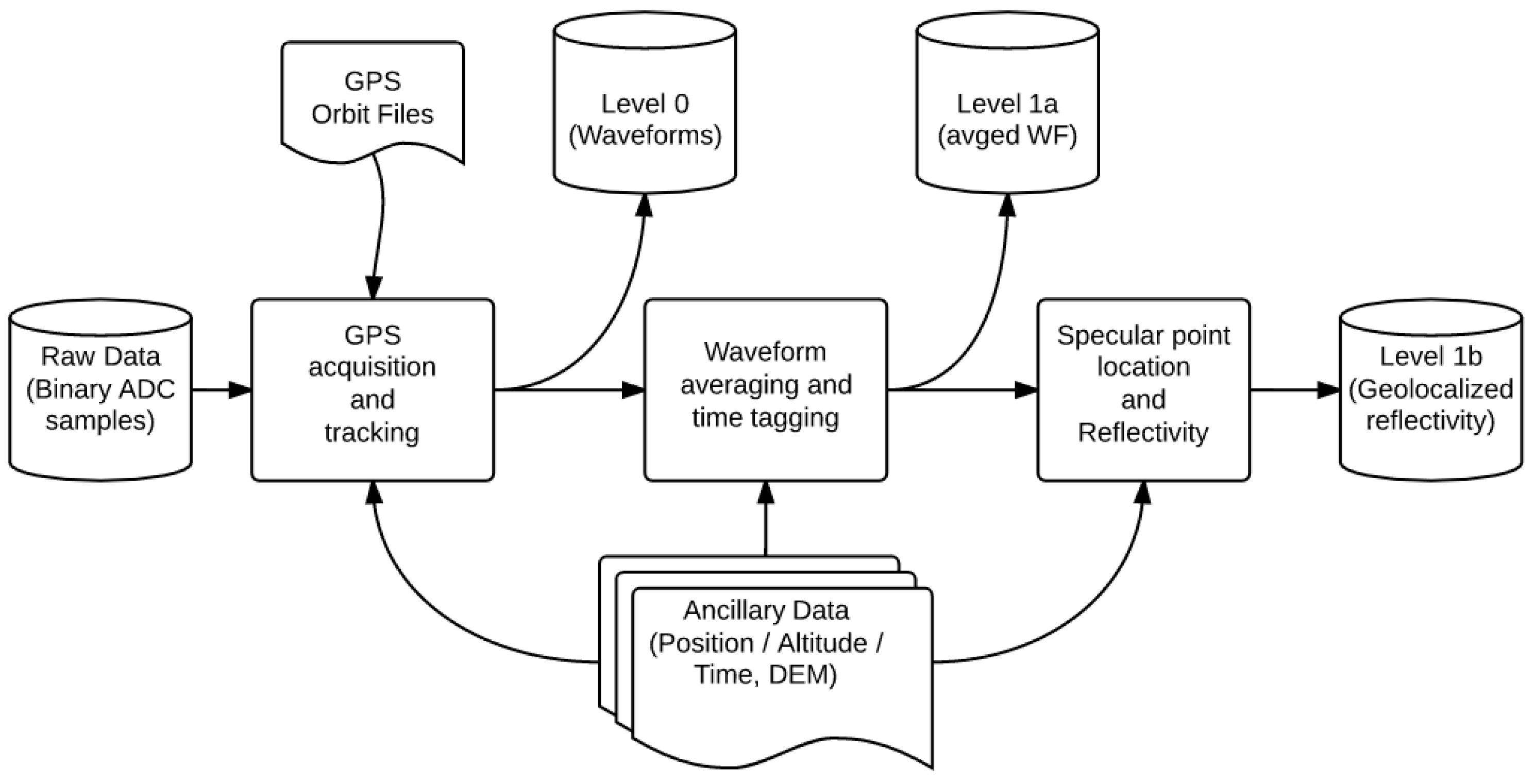
4.2. Data Processing Implementation
- 1
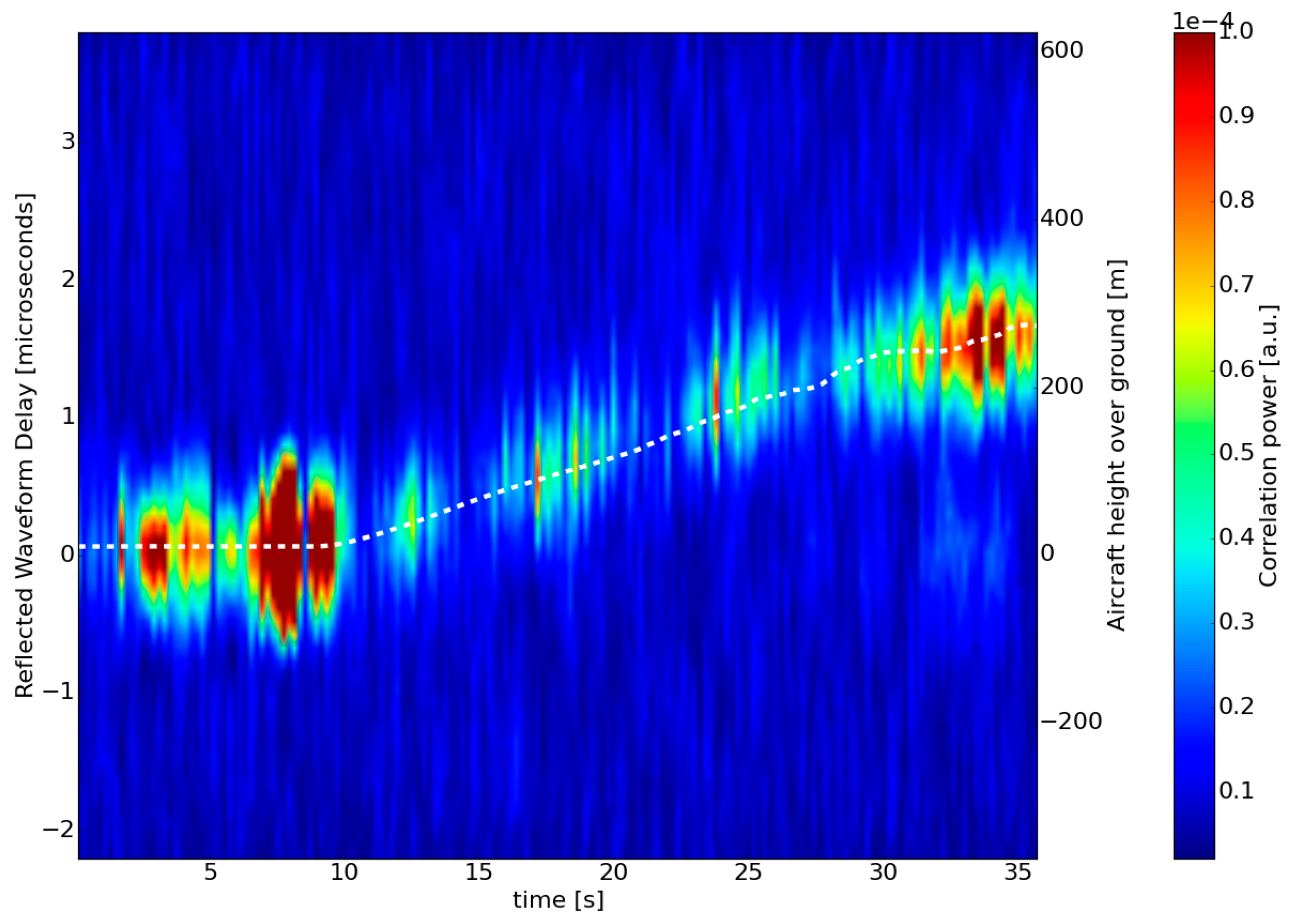
- GPS acquisition and tracking computations are performed on the raw, direct signal (zenith-pointing antenna), whereas the reflected signals (nadir-pointing antenna) are processed in a master-slave scheme using tracking parameters from the direct signal. This processing step leads to the generation of Level 0 files, consisting in time series of 5 ms coherently integrated, complex, direct and reflected (LHCP and RHCP) waveforms. Following various empirical tests, a coherent averaging time equal to 5 ms was selected. This value provides a good compromise between thermal noise reduction, and the conservation of incoherent signals, over forested areas in particular. However, other values of integration time could be used for specific studies in the future. In addition to the GNSS-R data, metadata and decoded GPS message-related information corresponding to each raw file of 30~60 s duration were stored. Optionally, the DDM can be computed using the method described in [21].
- 2
- In a second step, the relevant ancillary data, including aircraft attitude (yaw, pitch and roll), transmitter elevation and azimuth, are interpolated over the integration step, and calibration and correction factors are computed (antenna radiation pattern, inter-channel calibration). The waveforms are precisely time tagged from the GPS message, the waveform maxima are detected, and the corrected ICFs are computed for each polarization and coherent integration time step. Then, the ICFs are incoherently averaged (200 ms) and their standard deviation is estimated in order to be able to compute apparent reflectivity.
- 3
- For each flight, the data are then aggregated, including ancillary and calibration information. During this step, the apparent reflectivity is calculated, as well as the location and shape of each specular ellipse corresponding to the first Fresnel zone [45] from the ancillary data and precise time tagging of the ICFs.
5. Preliminary Results and Discussion
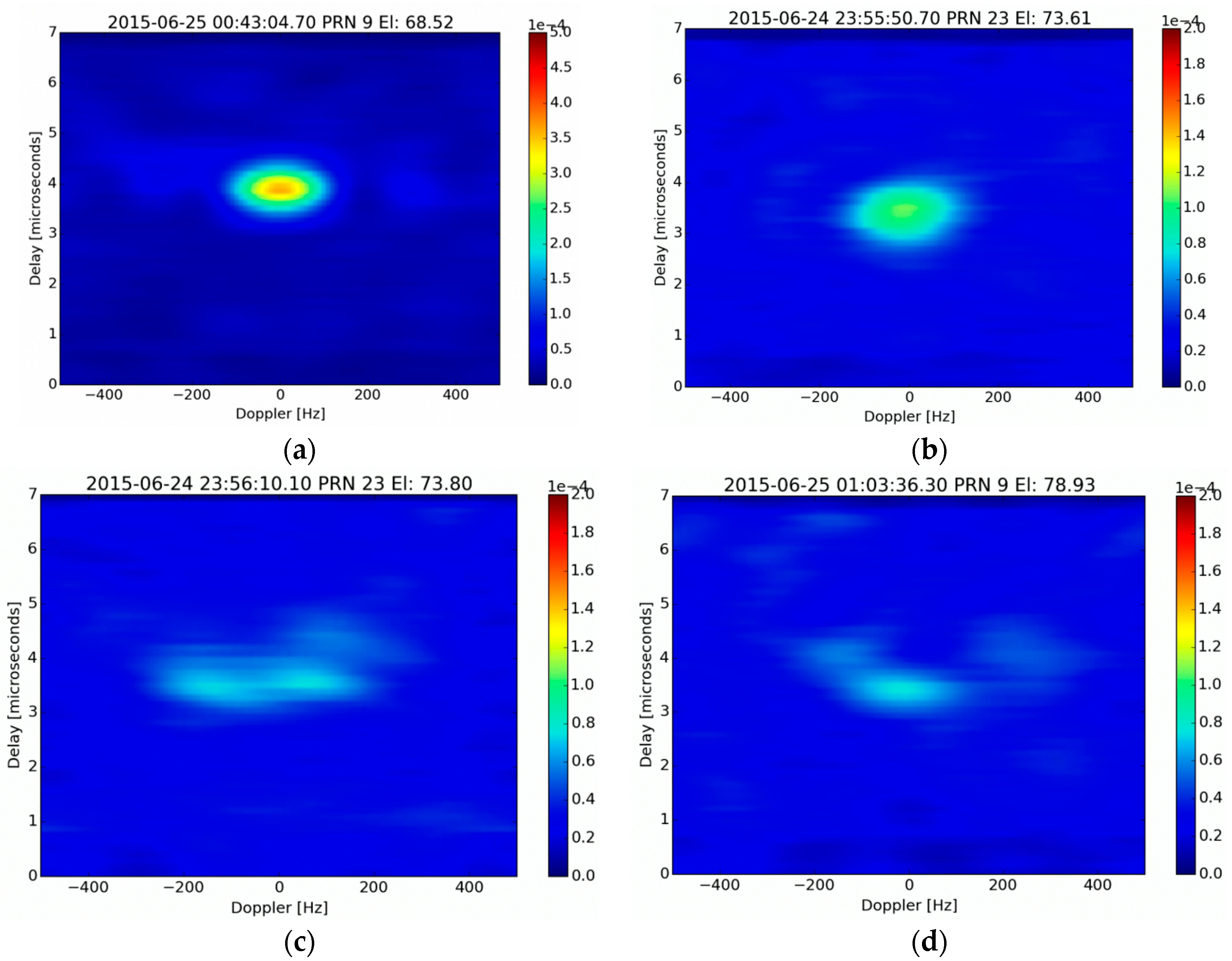
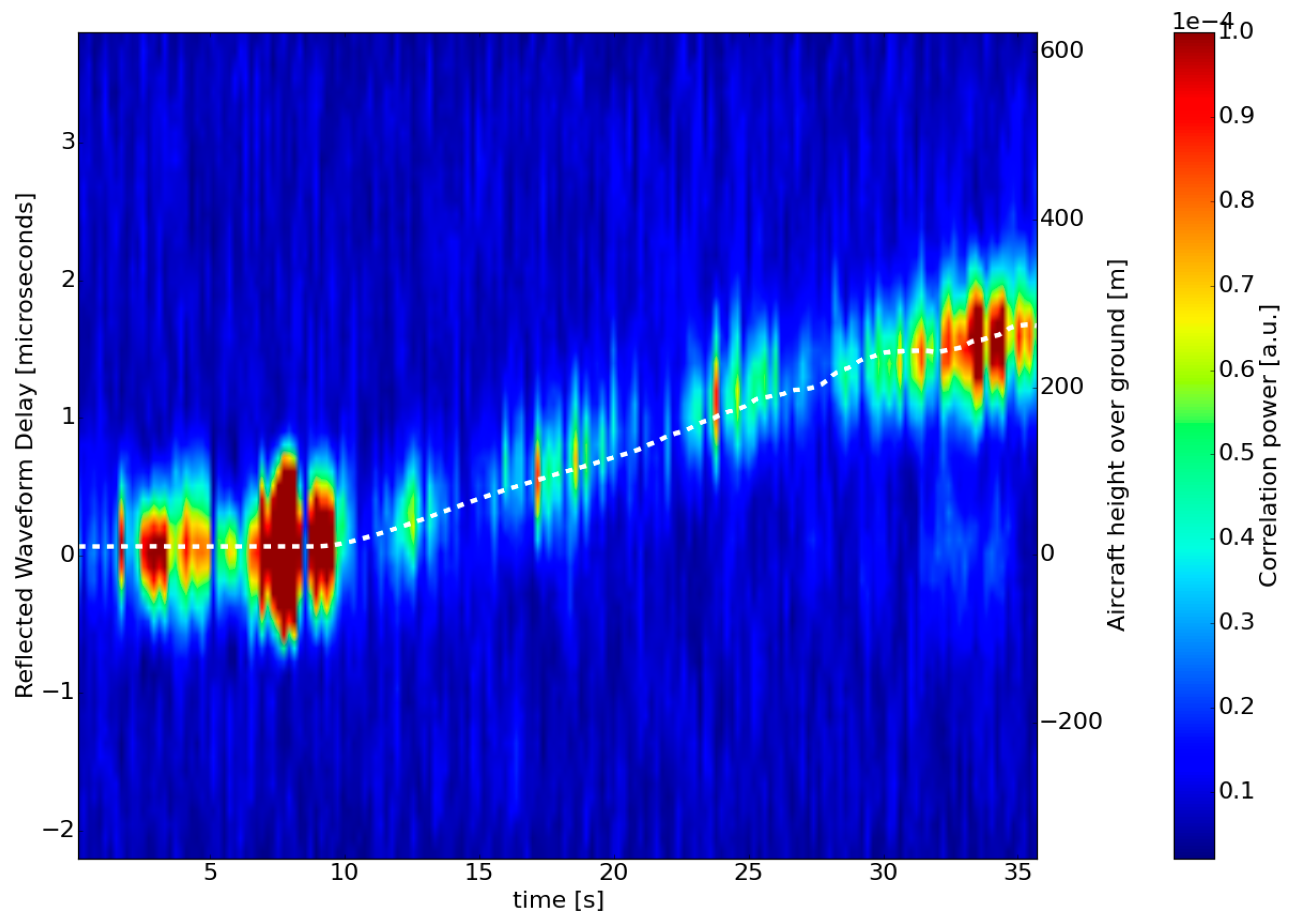
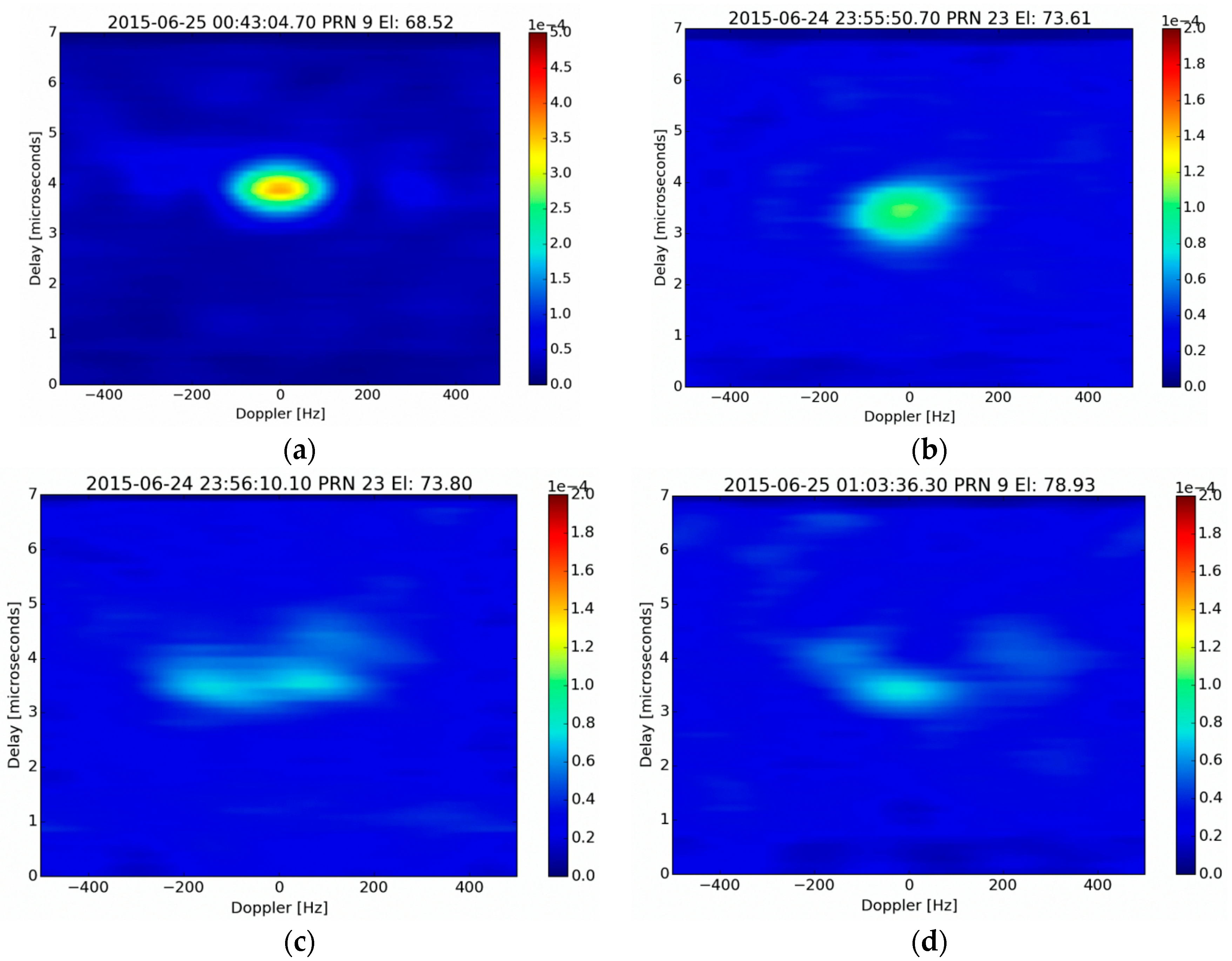
5.1. LHCP DDM Analysis
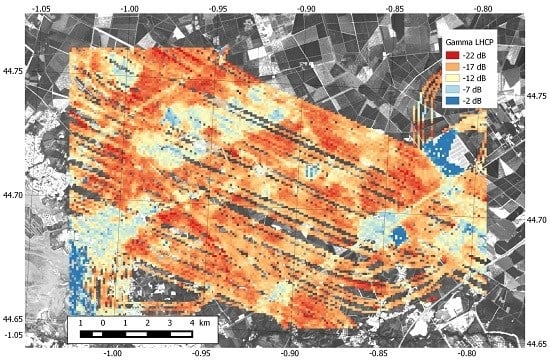
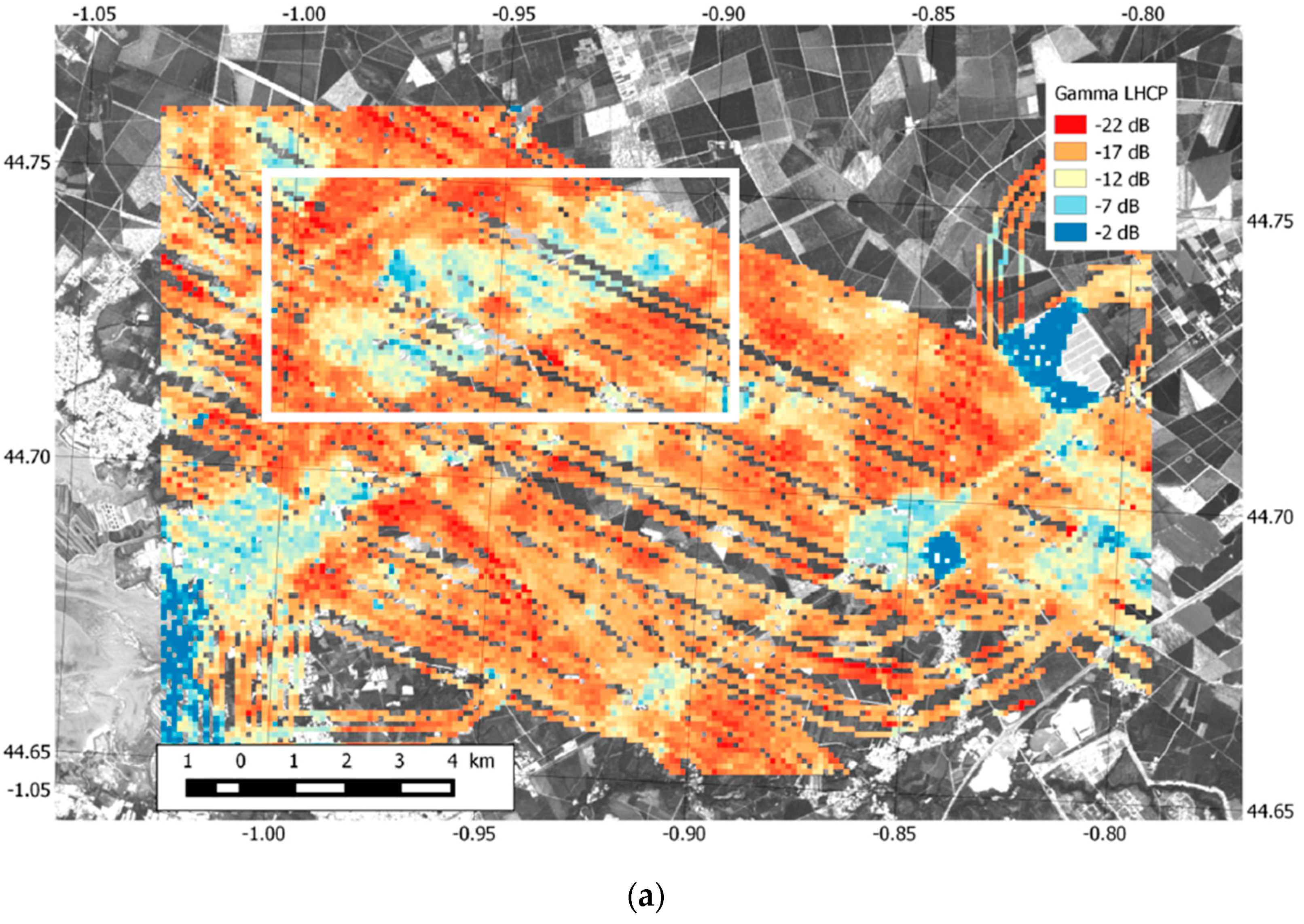
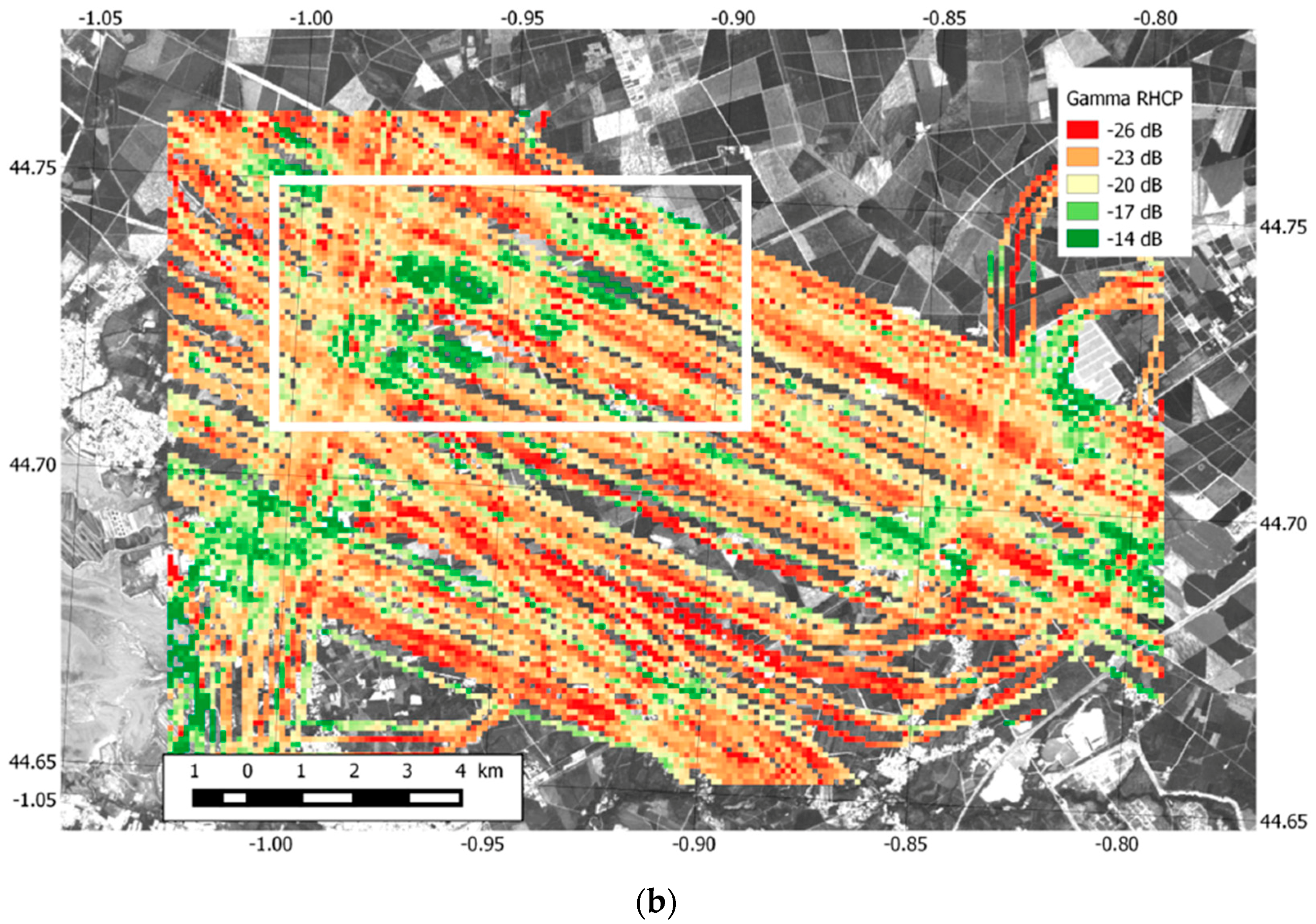
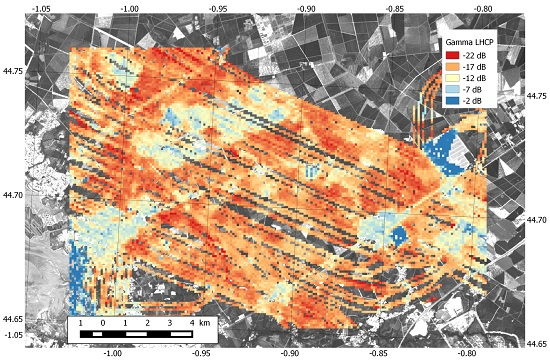
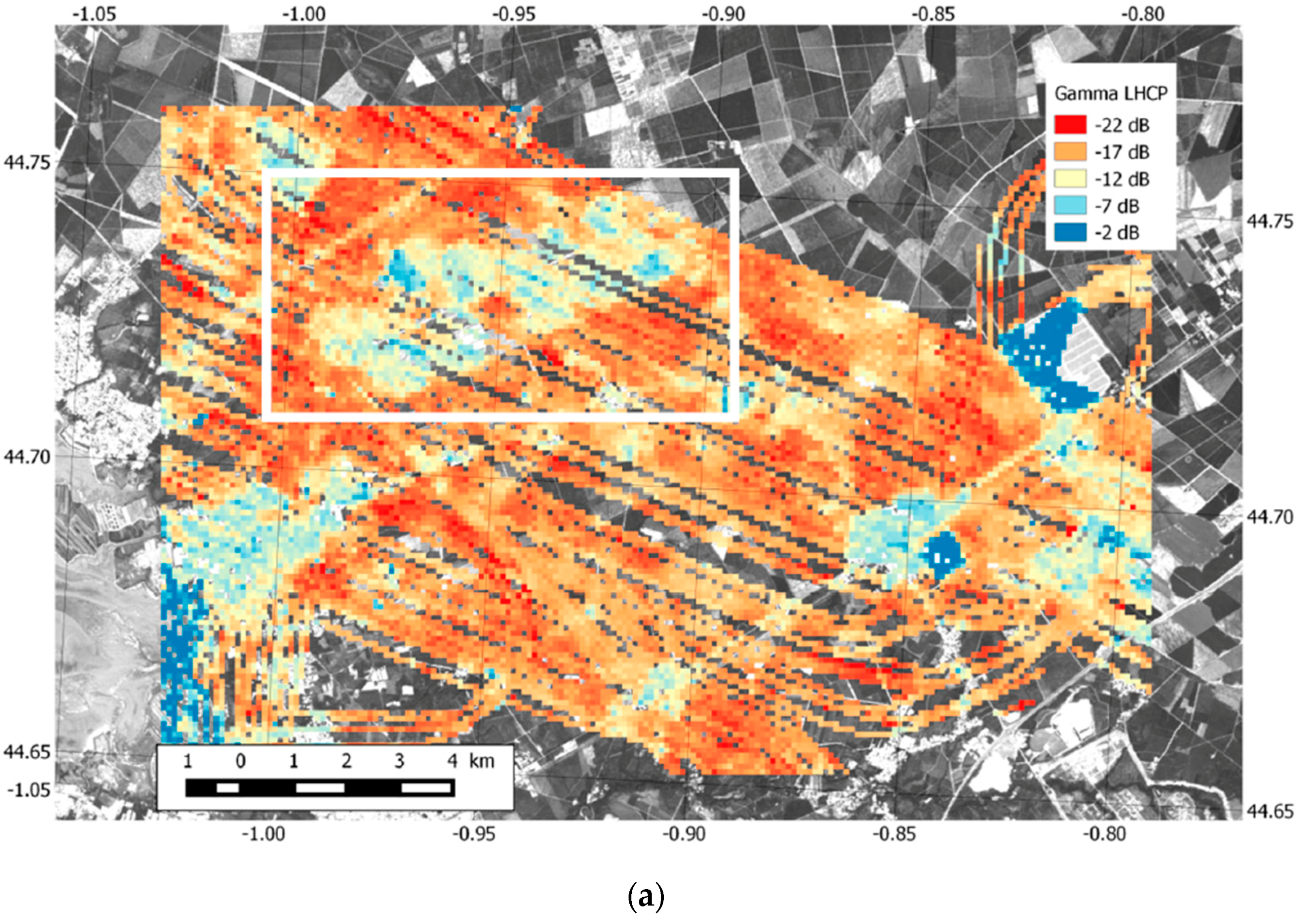
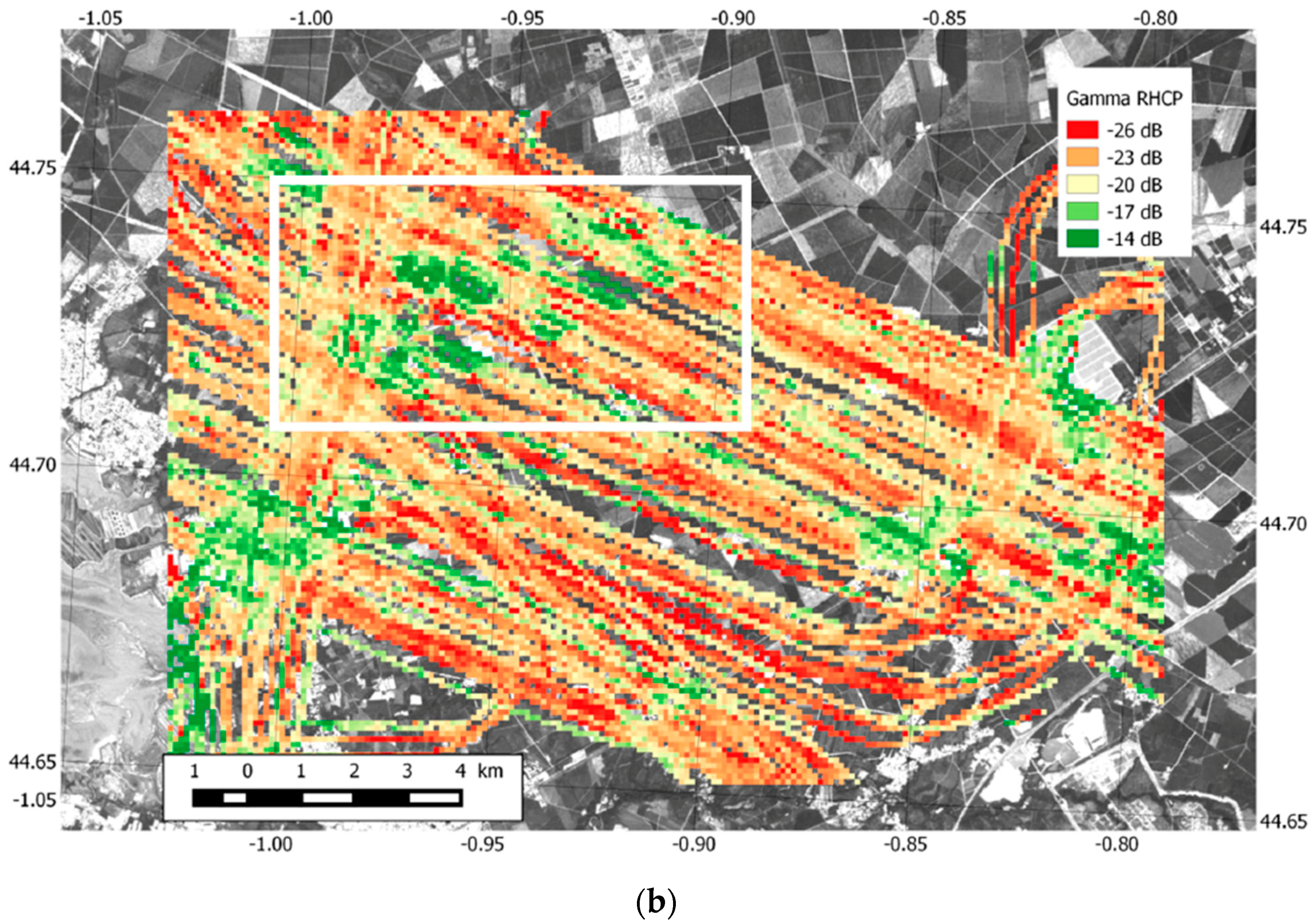
5.2. Reflectivity Maps
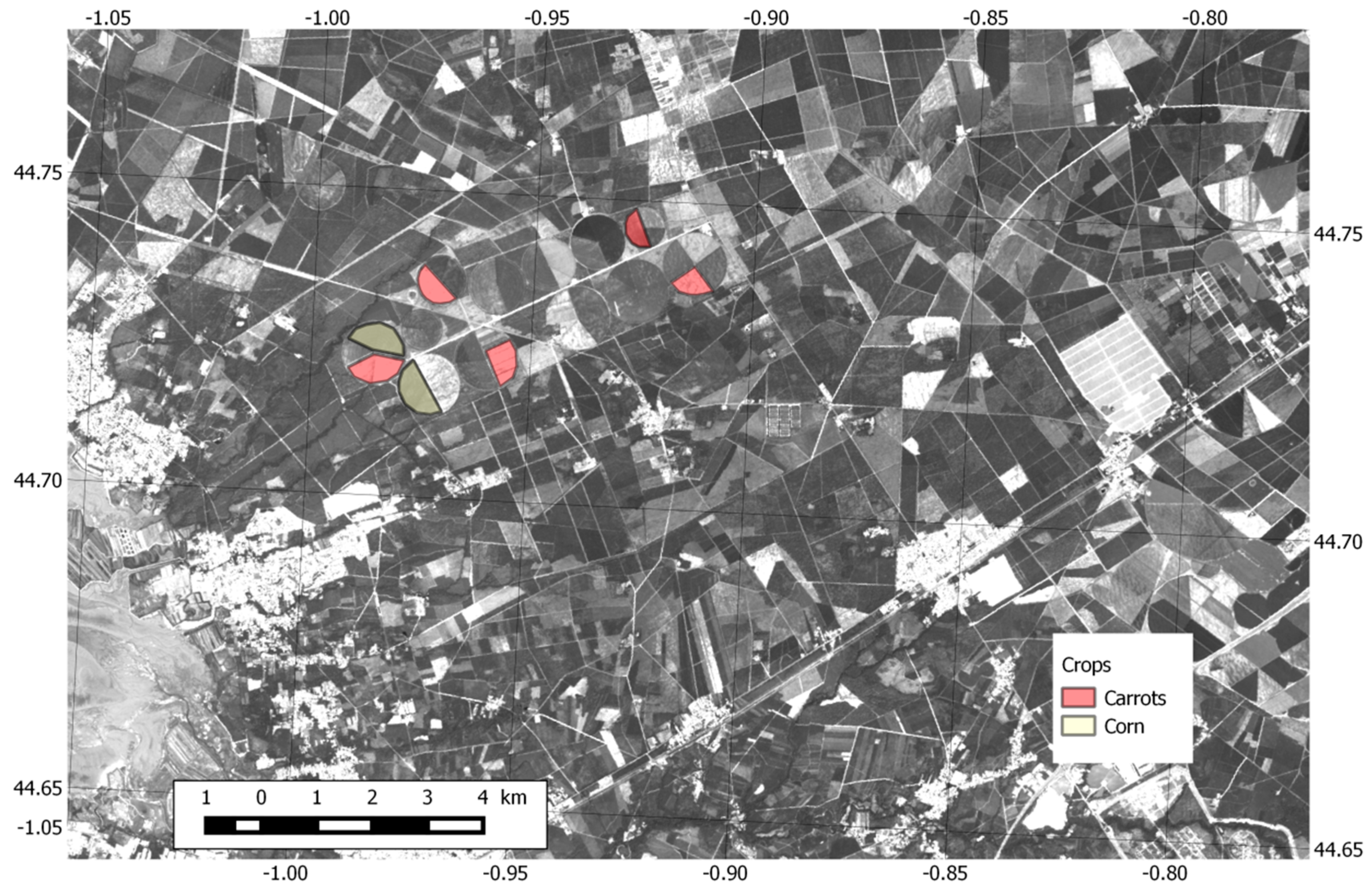
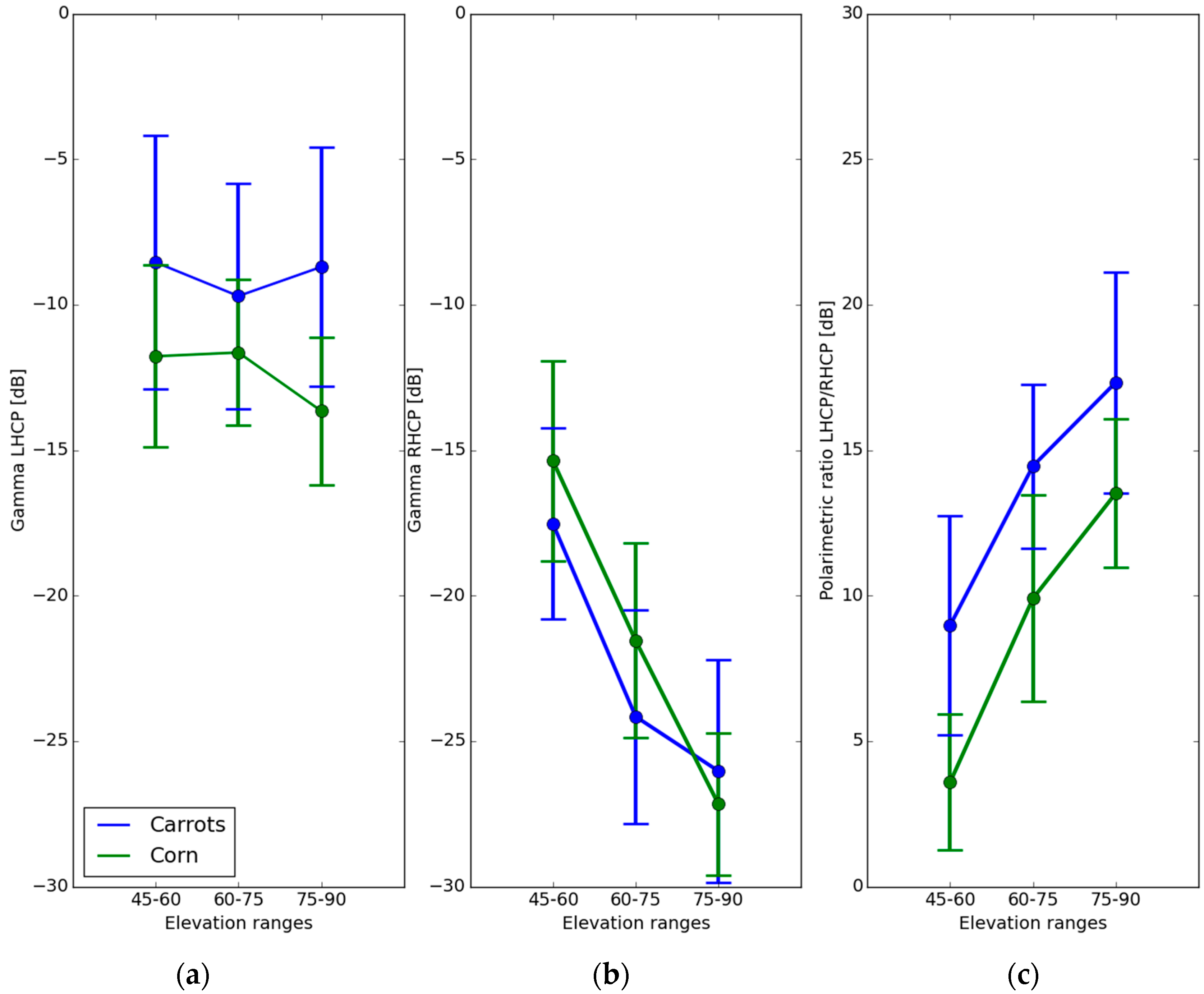
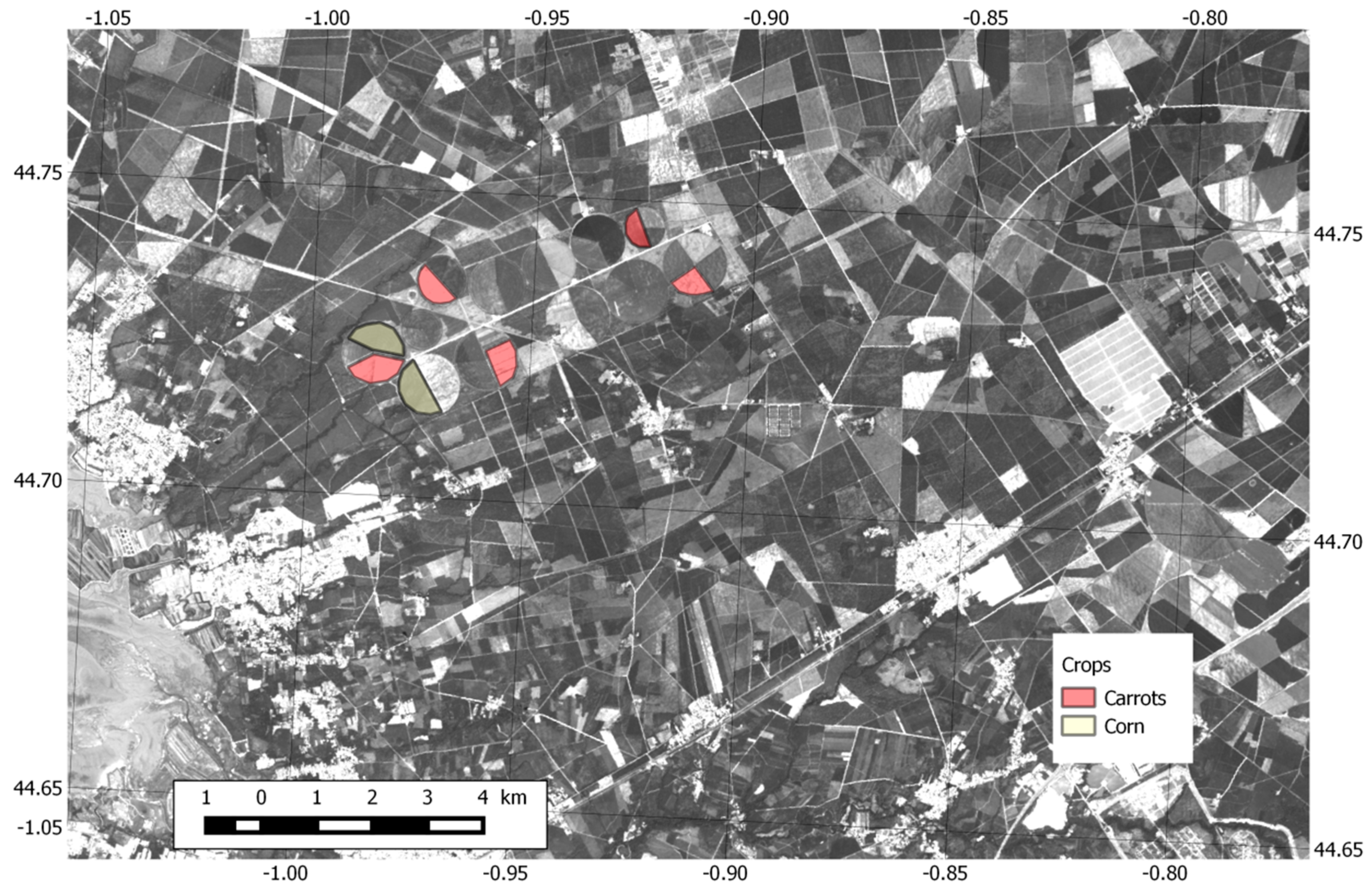
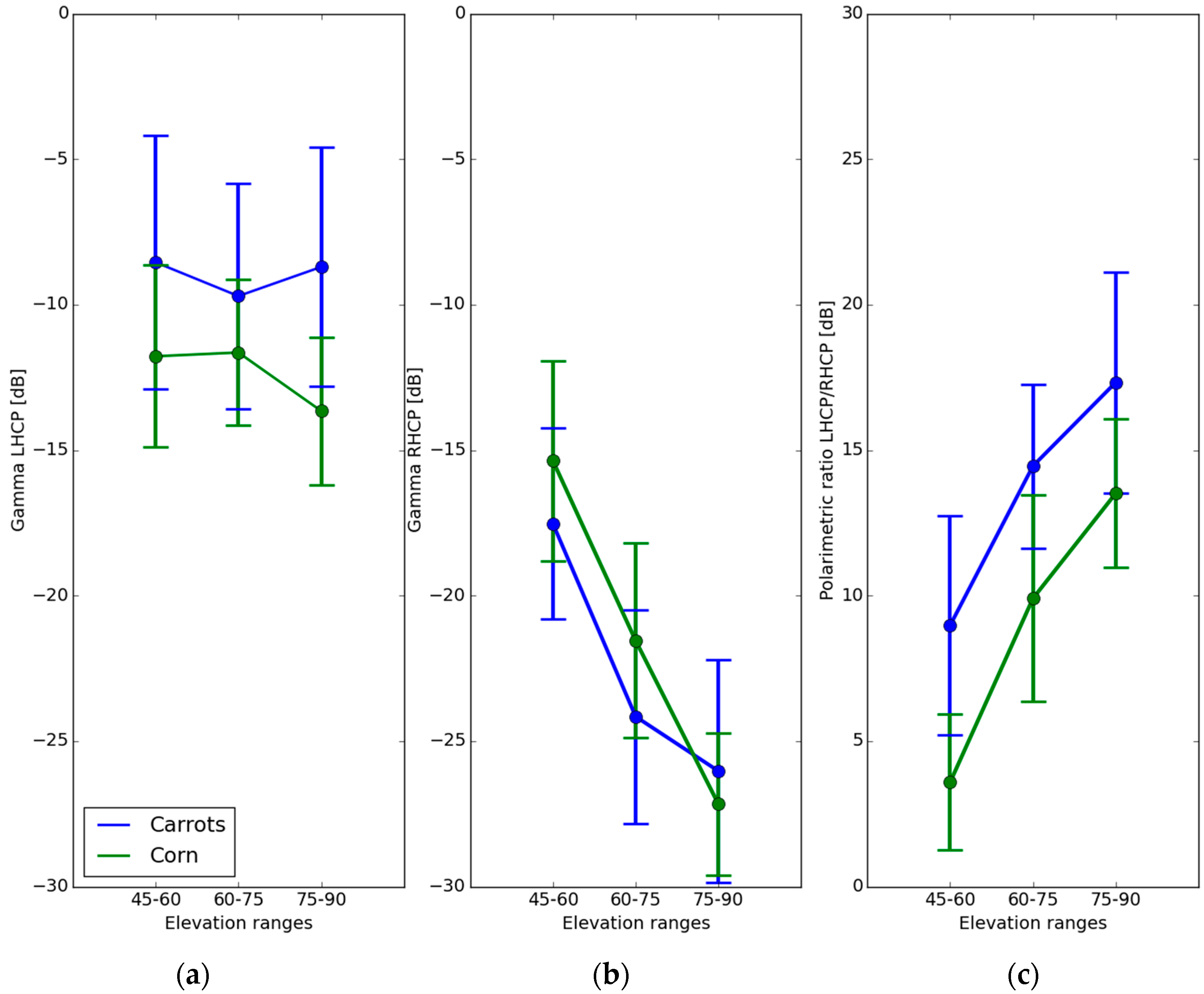
5.3. Apparent Reflectivity Analysis: Agricultural Areas
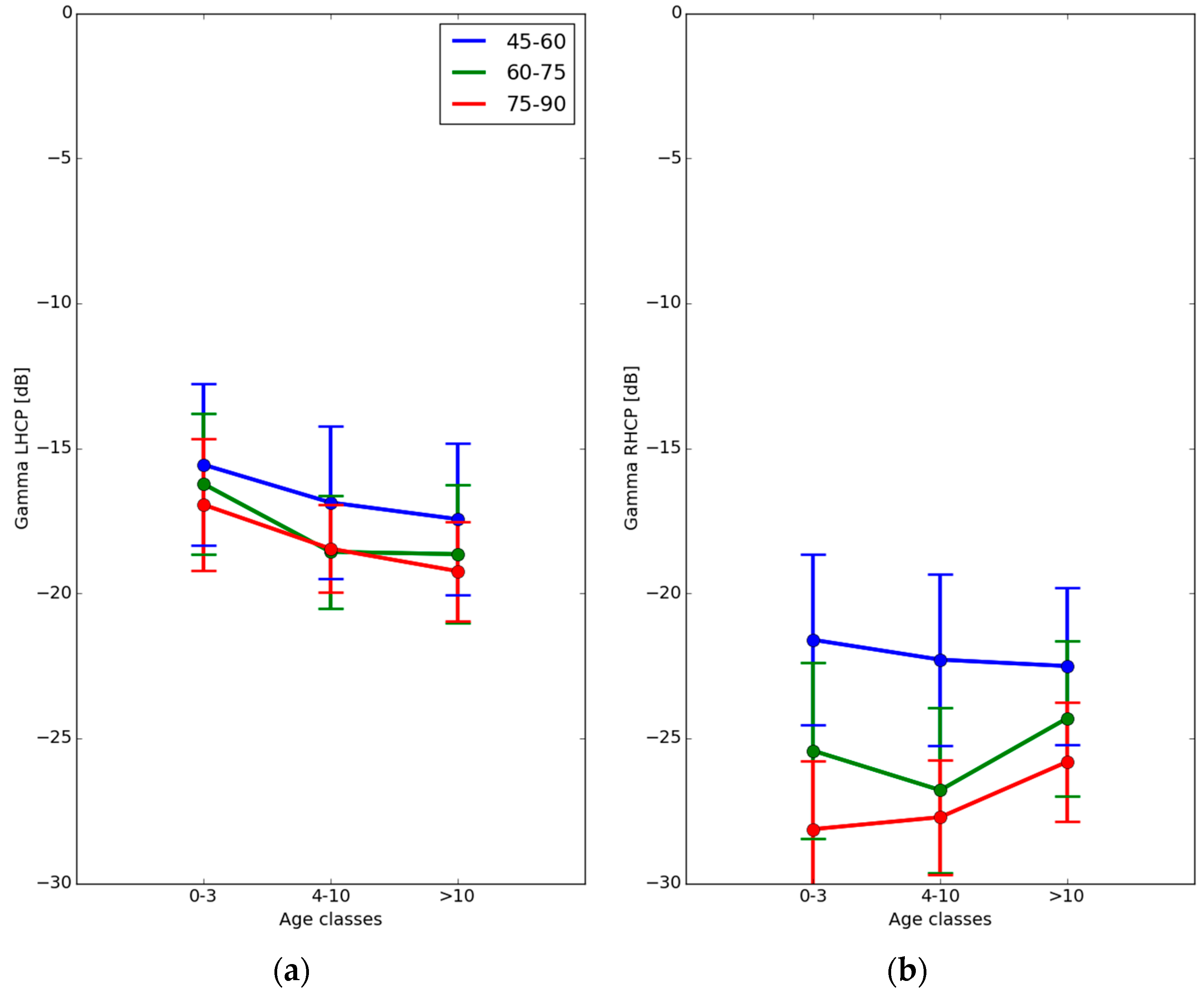
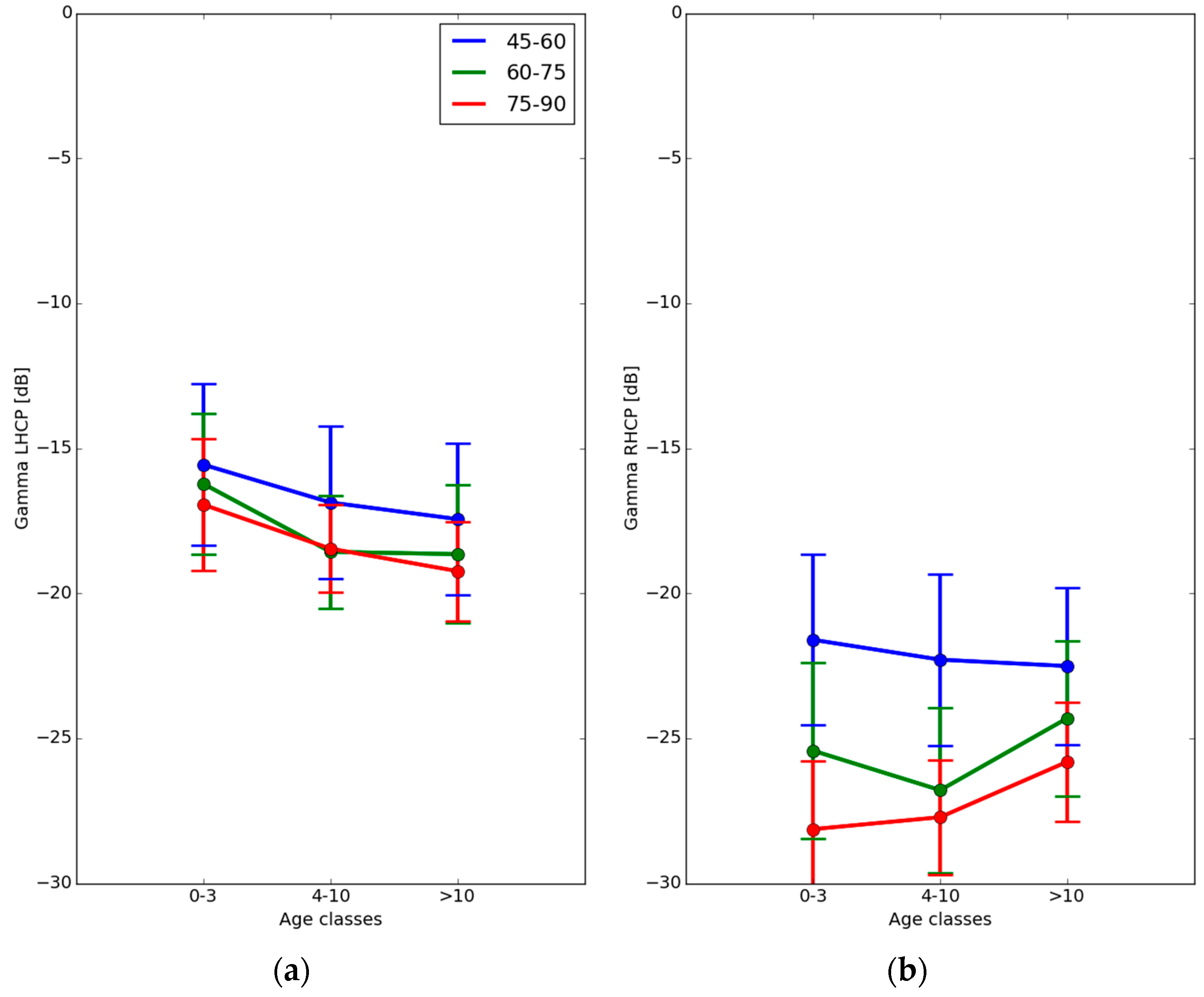
5.4. Apparent Reflectivity Analysis: Forests
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Koster, R.D.; Dirmeyer, P.A.; Guo, Z.; Bonan, G.; Chan, E.; Cox, P.; Gordon, C.T.; Kanae, S.; Kowalczyk, E.; Lawrence, D.; et al. Regions of Strong Coupling Between Soil Moisture and Precipitation. Science 2004, 305, 1138–1140. [Google Scholar] [CrossRef] [PubMed]
- Beven, K.; Fisher, J. Remote Sensing and Scaling in Hydrology. In Scaling in Hydrology Using Remote Sensing; Stewart, J., Engman, E.T., Feddes, B.A., Kerr, Y., Eds.; John Wiley & Sons: New York, NY, USA, 1996; pp. 93–111. [Google Scholar]
- Zribi, M.; Baghdadi, N.; Holah, N.; Fafin, O.; Guérin, C. Evaluation of a rough soil surface description with ASAR-ENVISAT radar data. Remote Sens. Environ. 2005, 95, 67–76. [Google Scholar] [CrossRef]
- Albergel, C.; Zakharova, E.; Calvet, J.-C.; Zribi, M.; Pardé, M.; Wigneron, J.-P.; Novello, N.; Kerr, Y.; Mialon, A.; Fritz, N.-D. A first assessment of the SMOS data in southwestern France using in situ and airborne soil moisture estimates: The CAROLS airborne campaign. Remote Sens. Environ. 2011, 115, 2718–2728. [Google Scholar] [CrossRef]
- Wagner, W.; Blöschl, G.; Pampaloni, P.; Calvet, J.-C.; Bizzarri, B.; Wigneron, J.-P.; Kerr, Y. Operational readiness of microwave remote sensing of soil moisture for hydrologic applications. Nord. Hydrol. 2007, 38, 1–20. [Google Scholar] [CrossRef]
- Martin-Neira, M. A Passive Reflectometry and Interferometry System (PARIS)—Application to Ocean Altimetry. ESA J. 1993, 17, 331–355. [Google Scholar]
- Garrison, J.L.; Katzberg, S.J.; Hill, M.I. Effect of Sea Roughness on Bistatically Scattered Range Coded Signals From the Global Positioning System. Geophys. Res. Lett. 1998, 25, 2257. [Google Scholar] [CrossRef]
- Kavak, A.; Vogel, W.J.; Xu, G. Using GPS to measure ground complex permittivity. Electron. Lett. 1998, 34, 254–255. [Google Scholar] [CrossRef]
- Zavorotny, V.U.; Voronovich, A.G. Bistatic GPS signal reflections at various polarizations from rough land surface with moisture content. In Proceedings of the IGARSS 2000, IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 24–28 July 2000; Volume 7, pp. 2852–2854.
- Rodriguez-Alvarez, N.; Camps, A.; Vall-Llossera, M.; Bosch-Lluis, X.; Monerris, A.; Ramos-Perez, I.; Valencia, E.; Martinez-Fernandez, J.; Baroncini-Turricchia, G.; Perez-Gutierrez, C.; et al. Land geophysical parameters retrieval using the interference pattern GNSS-R technique. IEEE Trans. Geosci. Remote Sens. 2011, 49, 71–84. [Google Scholar] [CrossRef]
- Egido, A.; Caparrini, M.; Ruffini, G.; Paloscia, S.; Santi, E.; Guerriero, L.; Pierdicca, N.; Floury, N. Global navigation satellite systems reflectometry as a remote sensing tool for agriculture. Remote Sens. 2012, 4, 2356–2372. [Google Scholar] [CrossRef]
- Yu, K.; Rizos, C.; Dempster, A.G. Forest change detection based on GNSS signal strength measurements. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium—IGARSS, Melbourne, Australia, 21–26 July 2013; pp. 1003–1006.
- Egido, A.; Paloscia, S.; Motte, E.; Guerriero, L.; Pierdicca, N.; Caparrini, M.; Santi, E.; Fontanelli, G.; Floury, N. Airborne GNSS-R Polarimetric Measurements for Soil Moisture and Above-Ground Biomass Estimation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 1522–1532. [Google Scholar] [CrossRef]
- Beckheinrich, J.; Beyerle, G.; Schoen, S.; Apel, H.; Semmling, M.; Wickert, J. WISDOM: GNSS-R based flood monitoring. In Proceedings of the 2012 Workshop on Reflectometry Using GNSS and Other Signals of Opportunity (GNSS+R), West Lafayette, IN, USA, 10–11 October 2012; pp. 1–6.
- Larson, K.M.; Gutmann, E.D.; Zavorotny, V.U.; Braun, J.J.; Williams, M.W.; Nievinski, F.G. Can we measure snow depth with GPS receivers? Geophys. Res. Lett. 2009, 36. [Google Scholar] [CrossRef]
- Cardellach, E.; Fabra, F.; Rius, A.; Pettinato, S.; D’Addio, S. Characterization of dry-snow sub-structure using GNSS reflected signals. Remote Sens. Environ. 2012, 124, 122–134. [Google Scholar] [CrossRef]
- Larson, K.M.; Small, E.E.; Gutmann, E.; Bilich, A.; Axelrad, P.; Braun, J. Using GPS multipath to measure soil moisture fluctuations: Initial results. GPS Solut. 2008, 12, 173–177. [Google Scholar] [CrossRef]
- Rodriguez-Alvarez, N.; Bosch-Lluis, X.; Camps, A.; Vall-llossera, M.; Valencia, E.; Marchan-Hernandez, J.F.; Ramos-Perez, I. Soil Moisture Retrieval Using GNSS-R Techniques: Experimental Results Over a Bare Soil Field. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3616–3624. [Google Scholar] [CrossRef]
- Roussel, N.; Frappart, F.; Ramillien, G.; Darrozes, J.; Baup, F.; Ha, C. Detection of soil moisture content changes by using a single geodetic antenna: The case of an agricultural plot. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 2008–2011.
- Zribi, M.; Pardé, M.; Boutin, J.; Fanise, P.; Hauser, D.; Dechambre, M.; Kerr, Y.; Leduc-Leballeur, M.; Reverdin, G.; Skou, N.; et al. CAROLS: A new airborne L-band radiometer for ocean surface and land observations. Sensors 2011, 11, 719–742. [Google Scholar] [CrossRef] [PubMed]
- Cardellach, E.; Fabra, F.; Nogués-Correig, O.; Oliveras, S.; Ribó, S.; Rius, A. GNSS-R ground-based and airborne campaigns for ocean, land, ice, and snow techniques: Application to the GOLD-RTR data sets. Radio Sci. 2011, 46. [Google Scholar] [CrossRef]
- Pei, Y.; Notarpietro, R.; Savi, P.; Cucca, M.; Dovis, F. A fully software Global Navigation Satellite System Reflectometry (GNSS-R) receiver for soil monitoring. Int. J. Remote Sens. 2014, 35, 2378–2391. [Google Scholar]
- Carreno-Luengo, H.; Amèzaga, A.; Vidal, D.; Olivé, R.; Munoz, J.; Camps, A. First Polarimetric GNSS-R Measurements from a Stratospheric Flight over Boreal Forests. Remote Sens. 2015, 7, 13120–13138. [Google Scholar] [CrossRef]
- Chew, C.; Shah, R.; Zuffada, C.; Hajj, G.; Masters, D.; Mannucci, A.J. Demonstrating soil moisture remote sensing with observations from the UK TechDemoSat-1 satellite mission. Geophys. Res. Lett. 2016, 43, 3317–3324. [Google Scholar] [CrossRef]
- Zavorotny, V.U.; Larson, K.M.; Braun, J.J.; Small, E.E.; Gutmann, E.D.; Bilich, A.L. A Physical Model for GPS Multipath Caused by Land Reflections: Toward Bare Soil Moisture Retrievals. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 3, 100–110. [Google Scholar] [CrossRef]
- Brogioni, M.; Egido, A.; Floury, N.; Giusto, R.; Guerriero, L.; Pierdicca, N. A simulator prototype of delay-doppler maps for GNSS reflections from bare and vegetated soils. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Honolulu, HI, USA, 25–30 July 2010; pp. 3809–3812.
- Guerriero, L.; Pierdicca, N.; Egido, A.; Caparrini, M.; Paloscia, S.; Santi, E.; Floury, N. Modeling of the GNSS-R signal as a function of soil moisture and vegetation biomass. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium—IGARSS, Melbourne, Australia, 21–26 July 2013; pp. 4050–4053.
- Wu, X.; Jin, S. GNSS-Reflectometry: Forest canopies polarization scattering properties and modeling. Adv. Space Res. 2014, 54, 863–870. [Google Scholar] [CrossRef]
- Pierdicca, N.; Guerriero, L.; Giusto, R.; Brogioni, M.; Egido, A. SAVERS: A simulator of GNSS reflections from bare and vegetated soils. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6542–6554. [Google Scholar] [CrossRef]
- Egido, A. GNSS Reflectometry for Land Remote Sensing Applications. Ph.D. Thesis, Universitat Politècnica de Catalunya, Barcelona, Spain, 2013. [Google Scholar]
- Troglia Gamba, M.; Marucco, G.; Pini, M.; Ugazio, S.; Falletti, E.; Presti, L. Prototyping a GNSS-Based Passive Radar for UAVs: An Instrument to Classify theWater Content Feature of Lands. Sensors 2015, 15, 28287–28313. [Google Scholar] [CrossRef] [PubMed]
- Zavorotny, V.U.; Gleason, S.; Cardellach, E.; Camps, A. Tutorial on Remote Sensing Using GNSS Bistatic Radar of Opportunity. IEEE Geosci. Remote Sens. Mag. 2014, 2, 8–45. [Google Scholar] [CrossRef]
- Antcom 42G1215RL-AA-XT-1 Datasheet. Available online: http://www.antcom.com/documents/catalogs/Page/42G1215RL-AA-XT-1_L1L2GPSAntennas.pdf (accessed on 14 May 2016).
- Cobham DS1563 Datasheet. Available online: http://www.european-antennas.co.uk/media/1720/ds1563.pdf (accessed on 14 May 2016).
- Bavaro, M. SDRNav40 Webpage. Available online: http://www.onetalent-gnss.com/ideas/software-defined-radio/sdrnav40 (accessed on 14 May 2016).
- Ixblue Airins Datasheet. Available online: https://www.ixblue.com/products/airins (accessed on 14 May 2016).
- Ublox NEO/LEA 6T Reference. Available online: https://www.u-blox.com/en/product/neolea-6t (accessed on 14 May 2016).
- Hauser, D.; Caudal, G.; Le Gac, C.; Valentin, R.; Delaye, L.; Tison, C. KuROS: A new airborne Ku-band Doppler radar for observation of the ocean surface. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, USA, 13–18 July 2014; pp. 282–285.
- Porté, A.; Trichet, P.; Bert, D.; Loustau, D. Allometric relationships for branch and tree woody biomass of Maritime pine (Pinus pinaster Aıt.). For. Ecol. Manag. 2002, 158, 71–83. [Google Scholar] [CrossRef]
- Saleh, K.; Porte, A.; Guyon, D.; Ferrazzoli, P.; Wigneron, J.-P. A forest geometric description of a maritime pine forest suitable for discrete microwave models. IEEE Trans. Geosci. Remote Sens. 2005, 43, 2024–2035. [Google Scholar] [CrossRef]
- Shaiek, O.; Loustau, D.; Trichet, P.; Meredieu, C.; Bachtobji, B.; Garchi, S.; EL Aouni, M.H. Generalized biomass equations for the main aboveground biomass components of maritime pine across contrasting environments. Ann. For. Sci. 2011, 68, 443–452. [Google Scholar] [CrossRef]
- Le Toan, T.; Beaudoin, A.; Riom, J.; Guyon, D. Relating forest biomass to SAR data. IEEE Trans. Geosci. Remote Sens. 1992, 30, 403–411. [Google Scholar] [CrossRef]
- Beckmann, P.; Spizzichino, A. The Scattering of Electromagnetic Waves from Rough Surfaces; Radar Library; Artech House: Norwood, MA, USA, 1987. [Google Scholar]
- Zavorotny, V.U.; Voronovich, A.G. Scattering of GPS signals from the ocean with wind remote sensing application. IEEE Trans. Geosci. Remote Sens. 2000, 38, 951–964. [Google Scholar] [CrossRef]
- Roussel, N.; Frappart, F.; Ramillien, G.; Darrozes, J.; Desjardins, C.; Gegout, P.; Pérosanz, F.; Biancale, R. Simulations of direct and reflected wave trajectories for ground-based GNSS-R experiments. Geosci. Model Dev. 2014, 7, 2261–2279. [Google Scholar] [CrossRef]
- Soulat, F. Sea state monitoring using coastal GNSS-R. Geophys. Res. Lett. 2004, 31. [Google Scholar] [CrossRef]
- Villard, L. Forward & Inverse Modeling for Synthetic Aperture Radar Observables in Bistatic Configuration. Applications in Forest Remote Sensing. Ph.D. Thesis, Institut Supérieur de l’Aéronautique et de l’Espace, Toulouse, France, 2009. [Google Scholar]
- Ferrazzoli, P.; Guerriero, L.; Pierdicca, N.; Rahmoune, R. Forest biomass monitoring with GNSS-R: Theoretical simulations. Adv. Space Res. 2011, 47, 1823–1832. [Google Scholar] [CrossRef]
- Avitabile, V.; Herold, M.; Heuvelink, G.B.M.; Lewis, S.L.; Phillips, O.L.; Asner, G.P.; Armston, J.; Ashton, P.S.; Banin, L.; Bayol, N.; et al. An integrated pan-tropical biomass map using multiple reference datasets. Glob. Chang. Biol. 2016, 22, 1406–1420. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Instrument Capabilities | Current Set-up |
|---|---|---|
| Operating frequency | 925 to 2175 MHz (channel by channel selectable) | GPS L1 (1575 ± 2 MHz) |
| Bandwidth | Up to 40 MHz SSB | 4 MHz SSB |
| Sampling frequency | Up to 65 MSPS | 10.0 MSPS (2015), 16.368 MSPS (2014) |
| Polarization | Zenith: RHCP and LHCP Nadir: LHCP and RHCP | Zenith: RHCP Nadir: LHCP and RHCP |
| Code/Modulation | All L Band GNSS Open services (following implementation of the coding/modulation scheme) | GPS L1 C/A BPSK |
| Length of individual files | No minimum, Maximum: storage limited. | 15, 30, 36 or 60 s |
| Calibration scheme | 1-to-1 relative channel cross-calibration | 1-to-1 relative channel cross-calibration |
| Calibration Stage | Channel 1 | Channel 2 | Channel 3 |
|---|---|---|---|
| Flight mode | ZR | NL | NR |
| Cal_1 | ZR | NR | NL |
| Cal_2 | NL | ZR | NR |
| Cal_3 | NR | NL | ZR |
| Id | Name | Cover | Latitude | Longitude |
|---|---|---|---|---|
| Zone 1 | Lamasquere | Agricultural area, flat | 43.49 | 1.23 |
| Zone 2 | Auch | Agricultural area, hills | 43.69 | 0.74 |
| Zone 3 | Nezer | Forest + Agricultural, flat | 44.55 | −1.02 |
| Zone 4 | Marcheprime | Forest + Agricultural, flat | 44.71 | −0.90 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Motte, E.; Zribi, M.; Fanise, P.; Egido, A.; Darrozes, J.; Al-Yaari, A.; Baghdadi, N.; Baup, F.; Dayau, S.; Fieuzal, R.; et al. GLORI: A GNSS-R Dual Polarization Airborne Instrument for Land Surface Monitoring. Sensors 2016, 16, 732. https://doi.org/10.3390/s16050732
Motte E, Zribi M, Fanise P, Egido A, Darrozes J, Al-Yaari A, Baghdadi N, Baup F, Dayau S, Fieuzal R, et al. GLORI: A GNSS-R Dual Polarization Airborne Instrument for Land Surface Monitoring. Sensors. 2016; 16(5):732. https://doi.org/10.3390/s16050732
Chicago/Turabian StyleMotte, Erwan, Mehrez Zribi, Pascal Fanise, Alejandro Egido, José Darrozes, Amen Al-Yaari, Nicolas Baghdadi, Frédéric Baup, Sylvia Dayau, Remy Fieuzal, and et al. 2016. "GLORI: A GNSS-R Dual Polarization Airborne Instrument for Land Surface Monitoring" Sensors 16, no. 5: 732. https://doi.org/10.3390/s16050732
APA StyleMotte, E., Zribi, M., Fanise, P., Egido, A., Darrozes, J., Al-Yaari, A., Baghdadi, N., Baup, F., Dayau, S., Fieuzal, R., Frison, P.-L., Guyon, D., & Wigneron, J.-P. (2016). GLORI: A GNSS-R Dual Polarization Airborne Instrument for Land Surface Monitoring. Sensors, 16(5), 732. https://doi.org/10.3390/s16050732