
Assistant Personal Robot (APR): Conception and Application of a Tele-Operated Assisted Living Robot



Abstract
:
1. Introduction
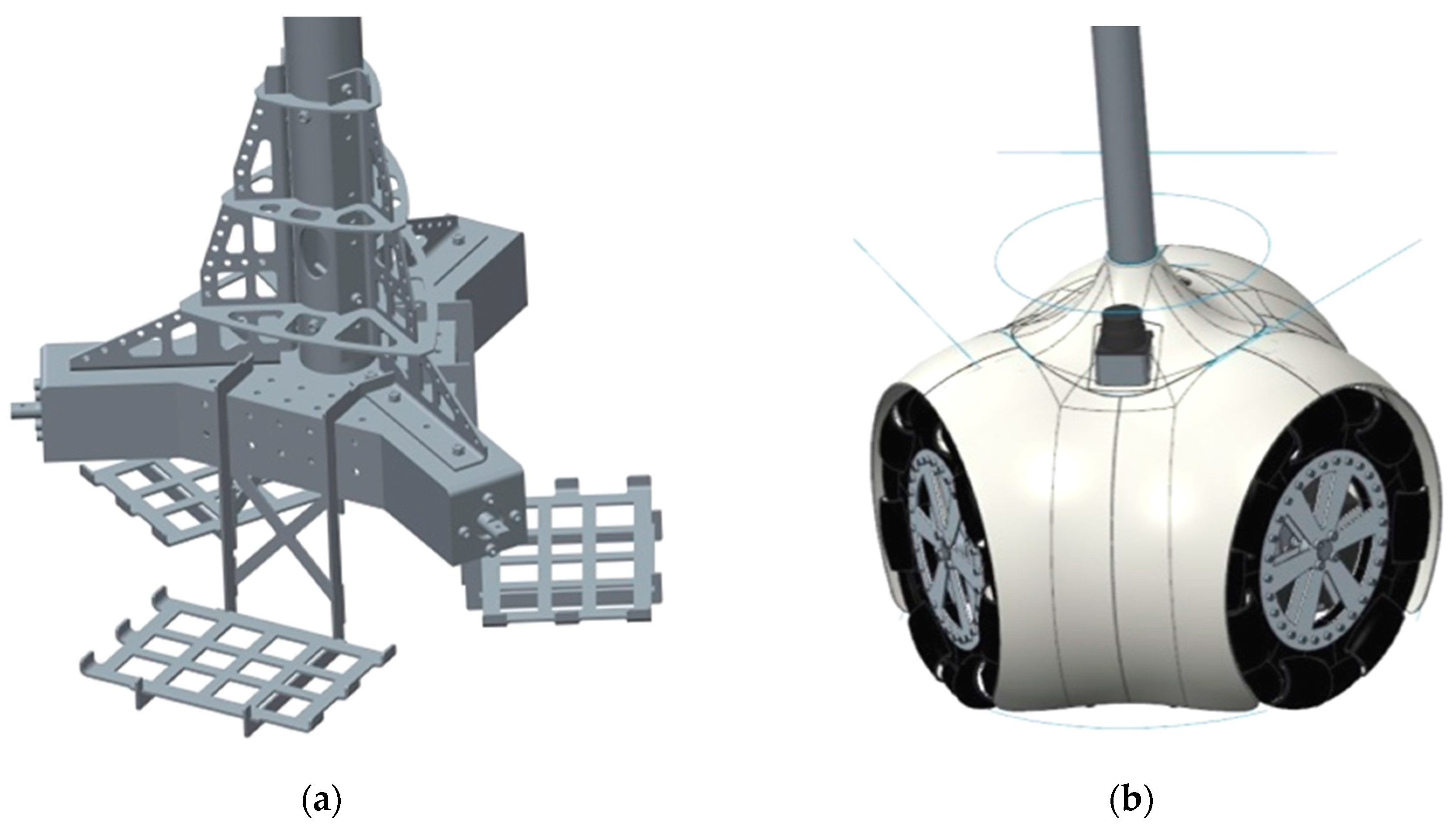
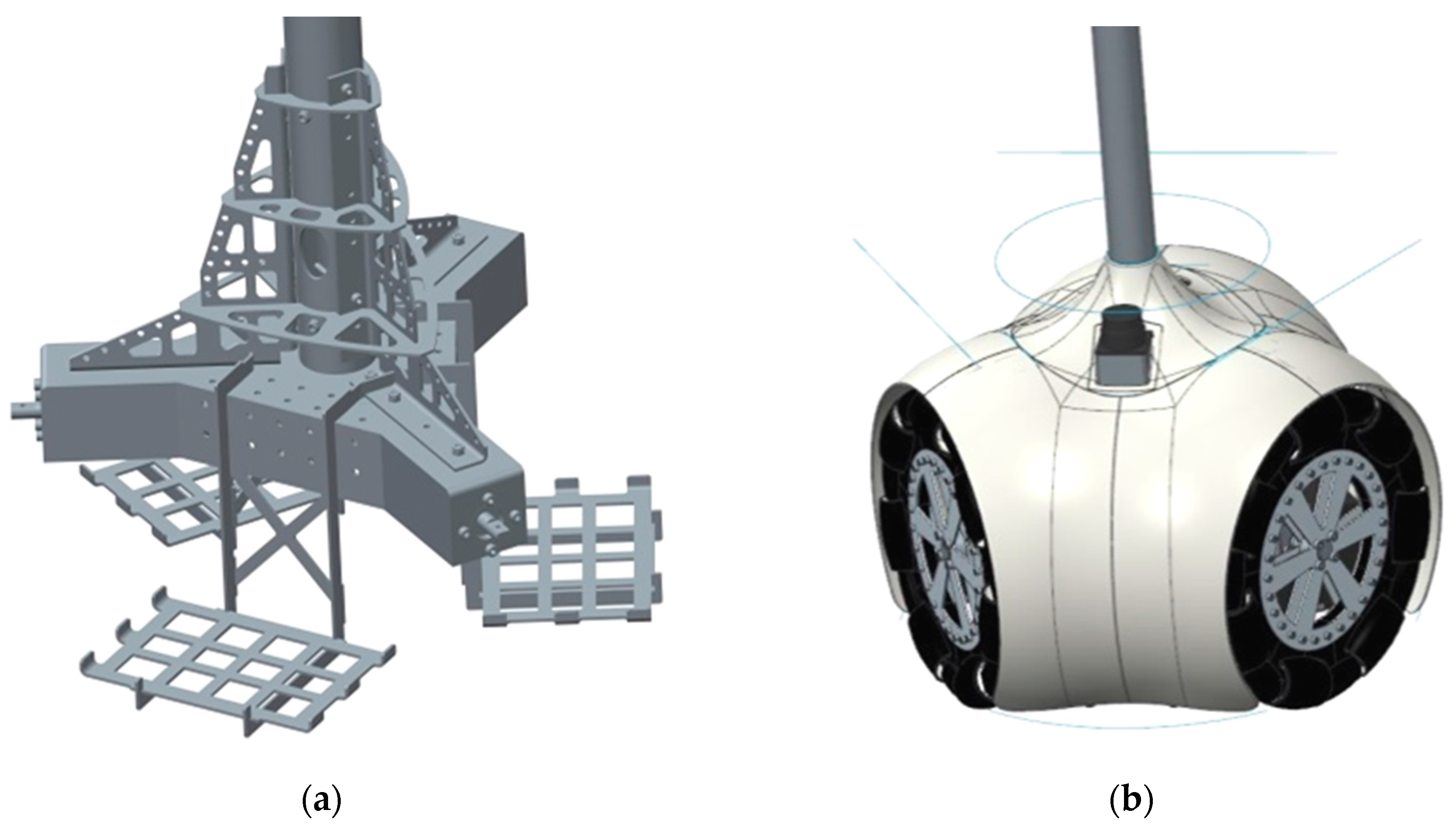
2. Mechanical Design
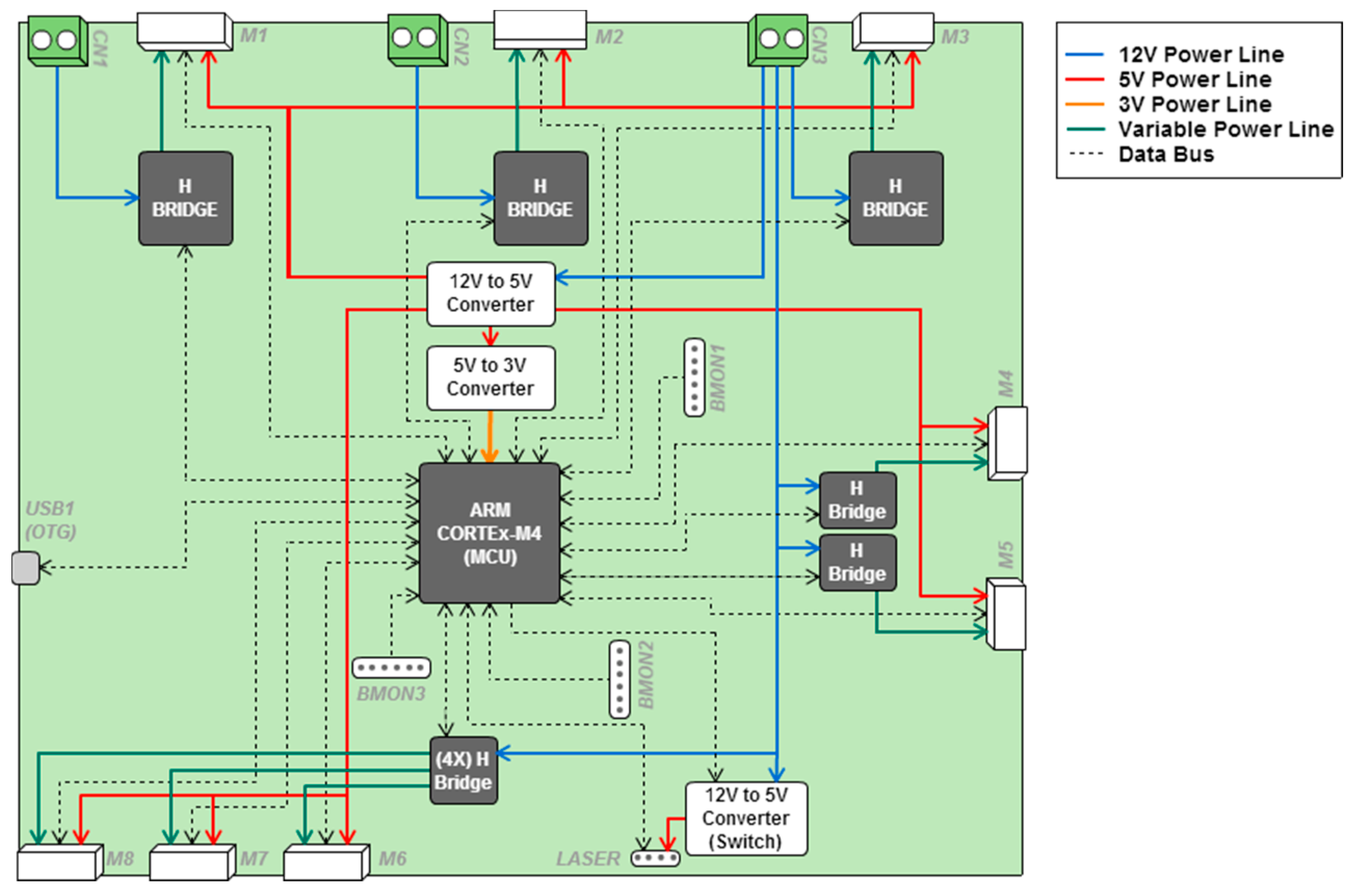
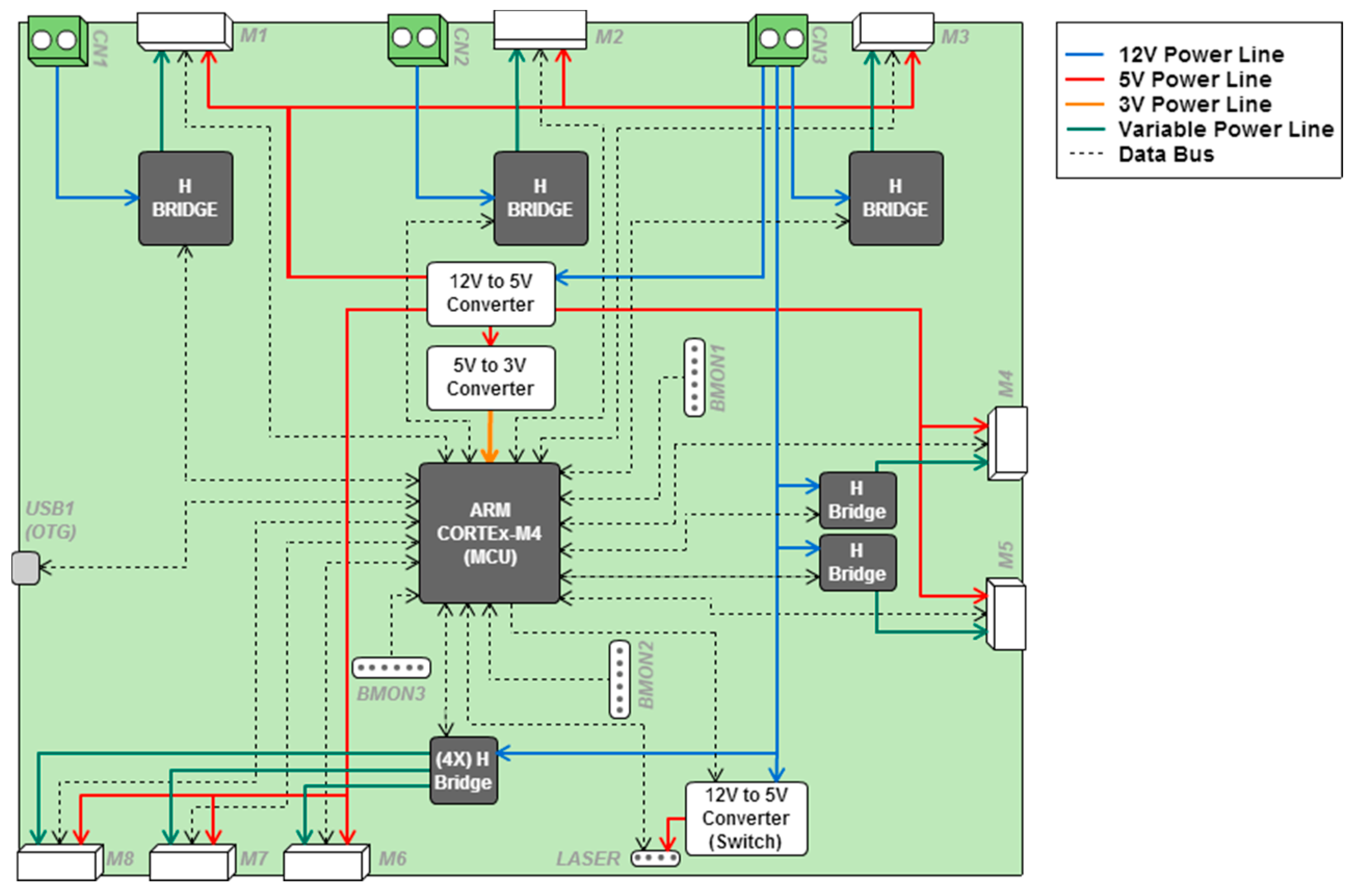
3. Electronic Components
4. Software Implementation
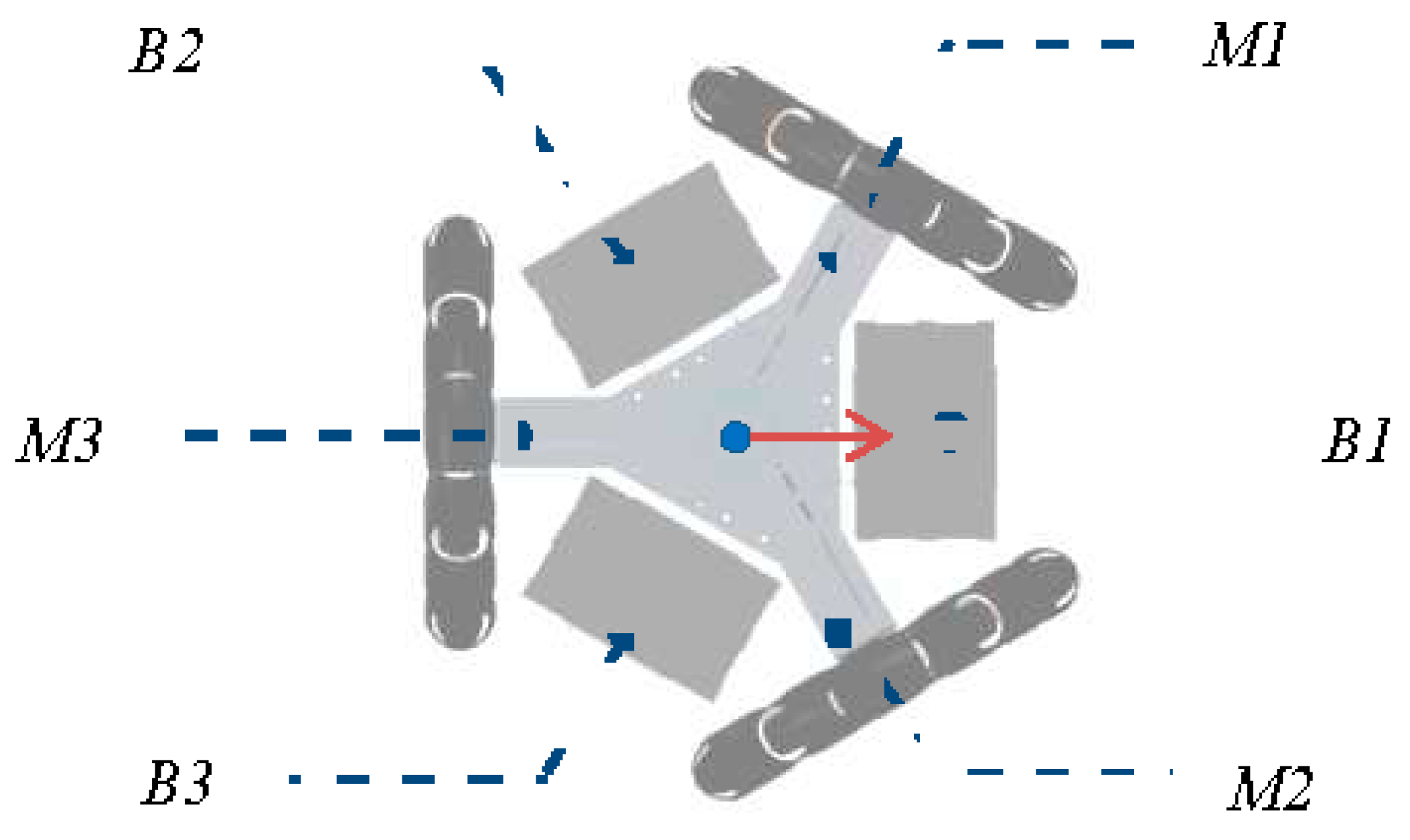
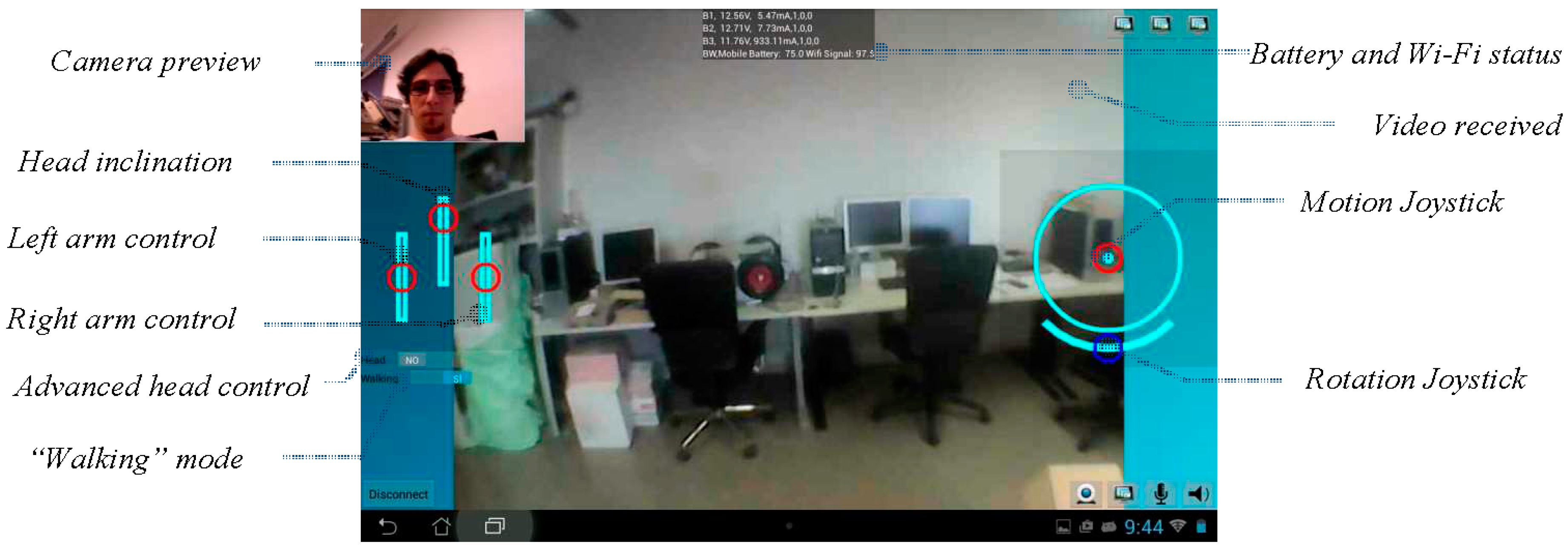
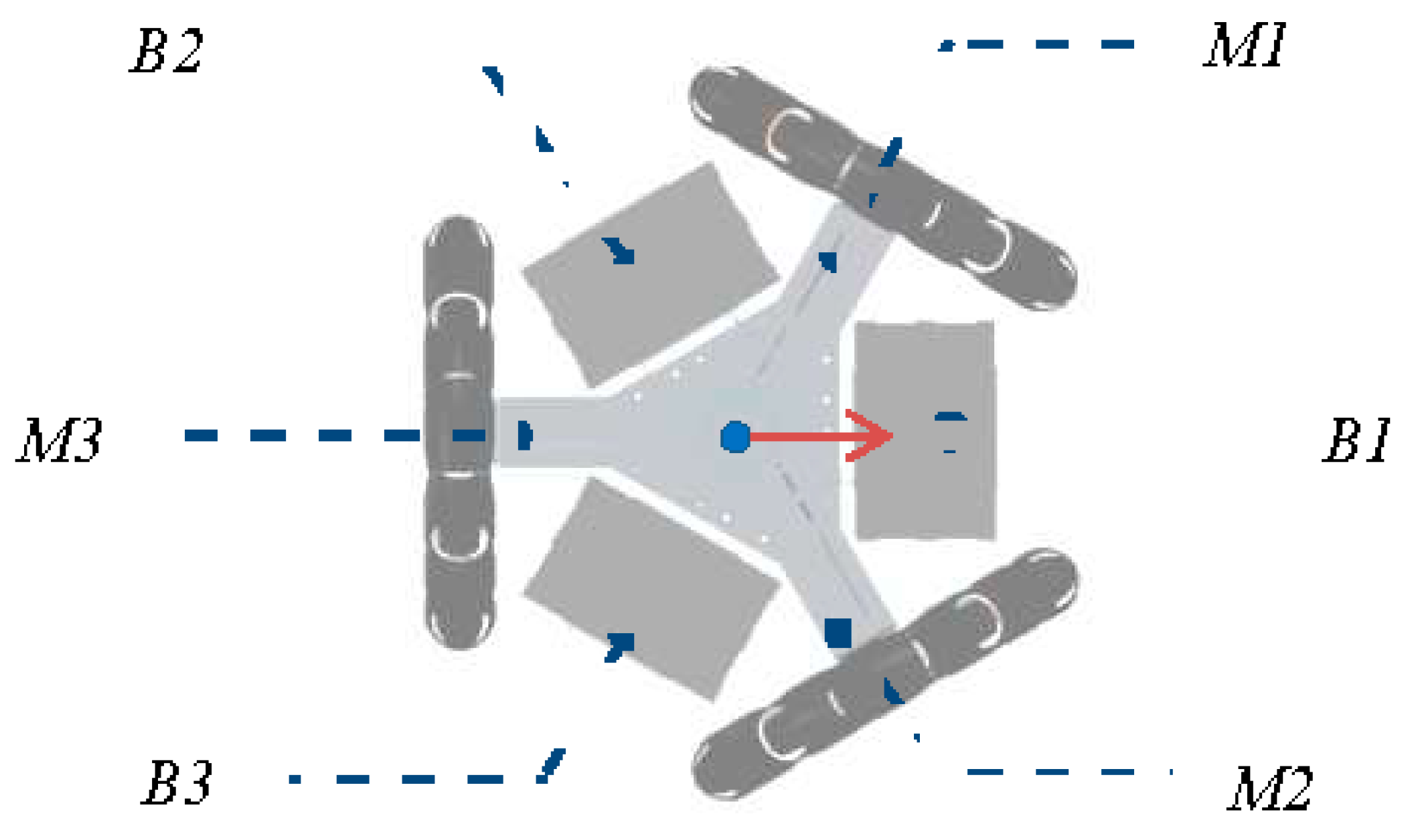
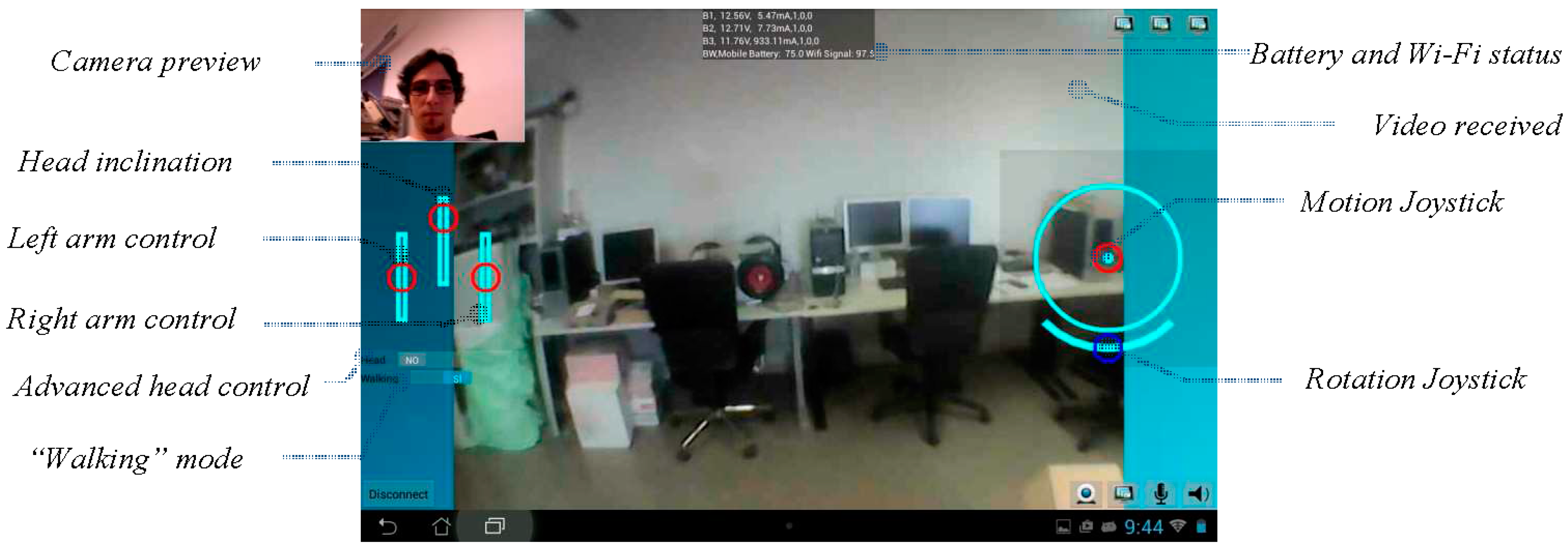
4.1. Transmission of Motion Control Orders
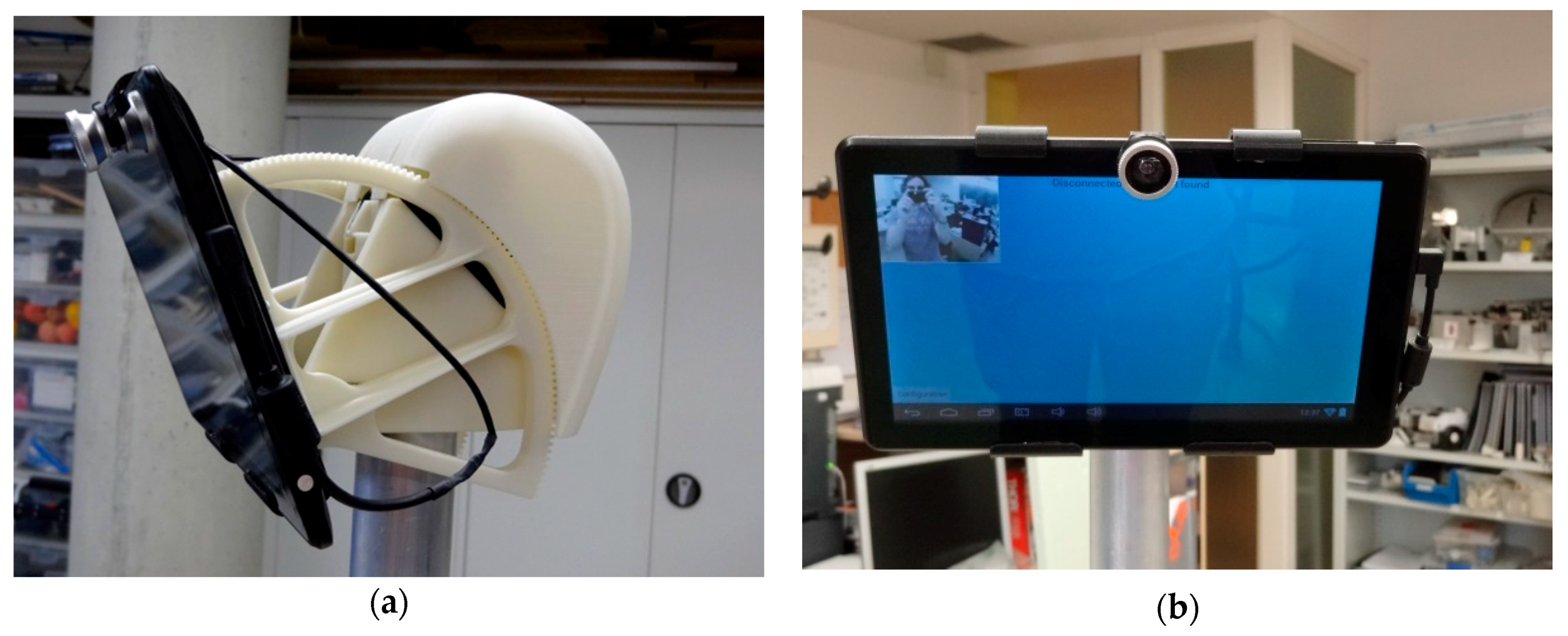
4.2. Transmission of Audio and Video Streaming
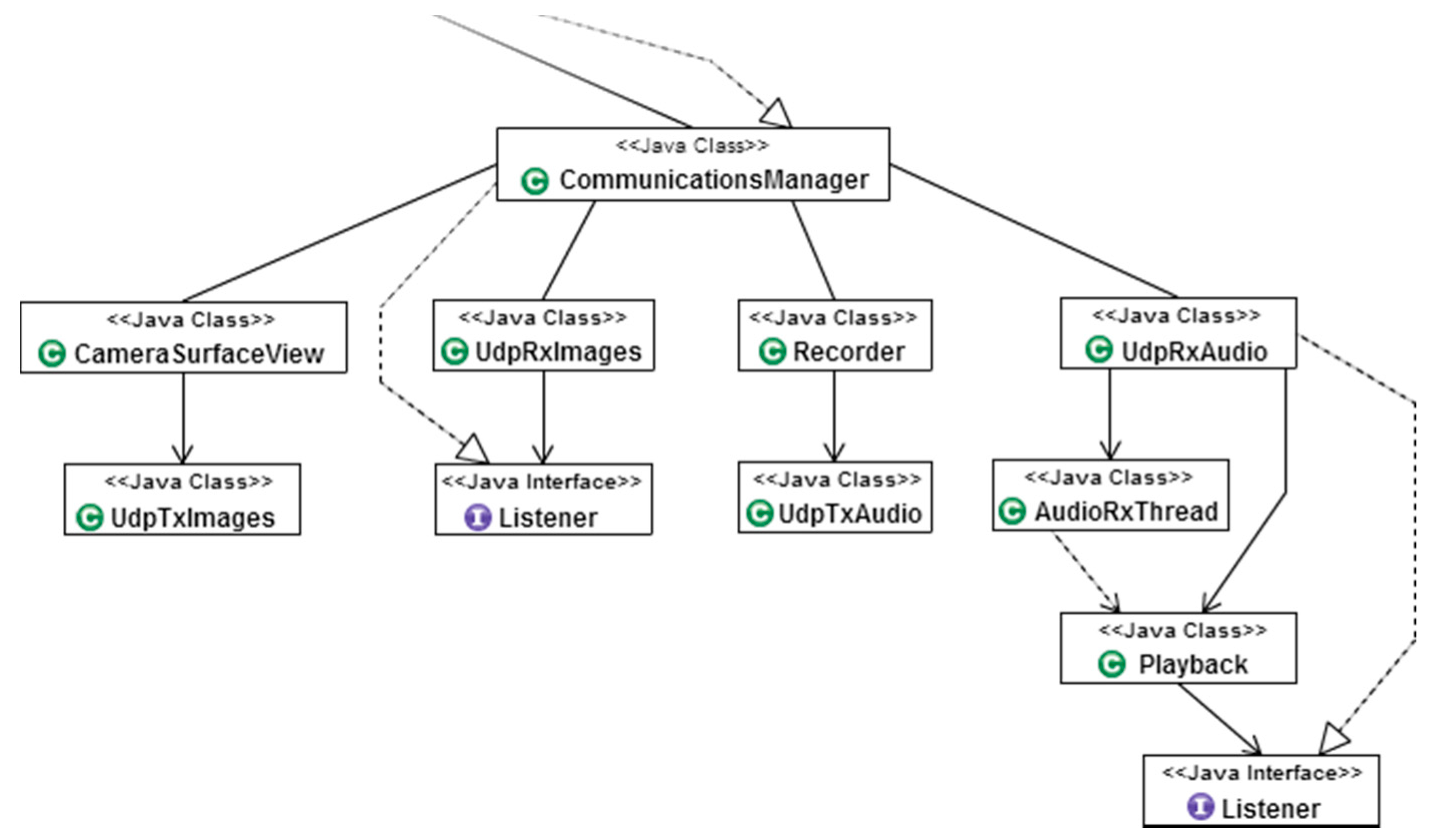
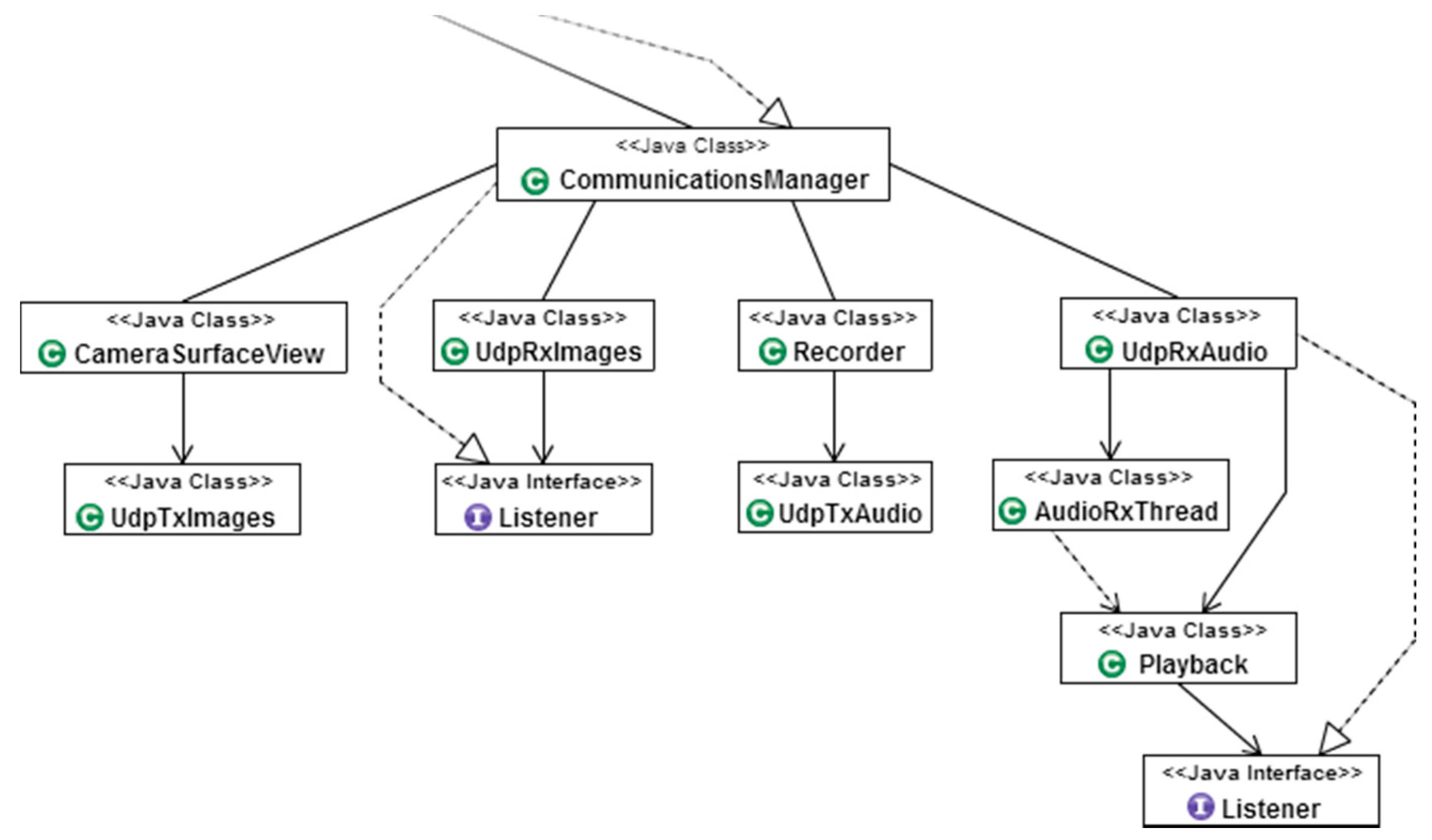
4.2.1. Videoconference Architecture
4.2.2. Network Communications Protocol
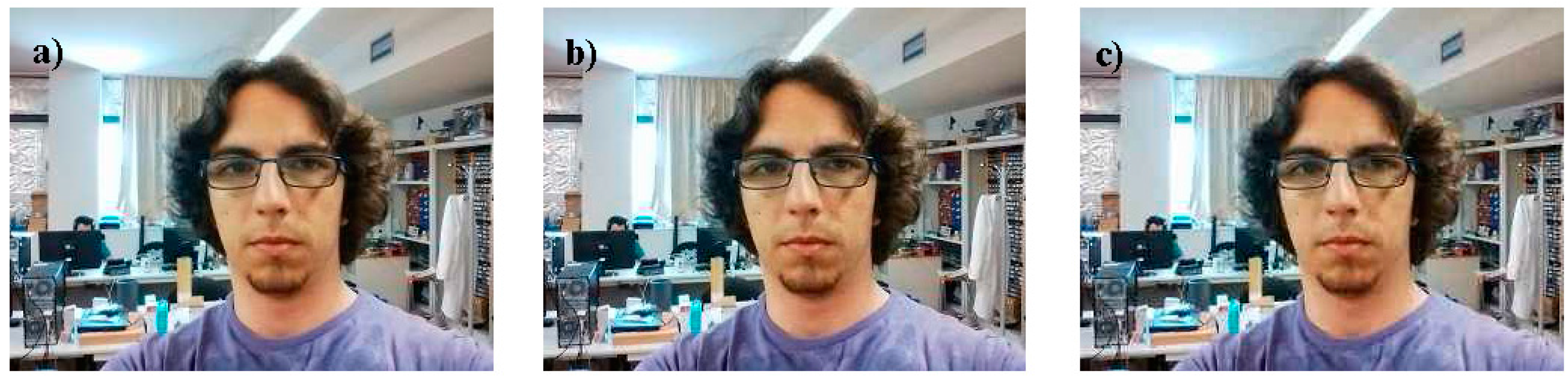
4.2.3. Video Communications
4.2.4. Audio Communications
4.3. External Network Server
5. Tests
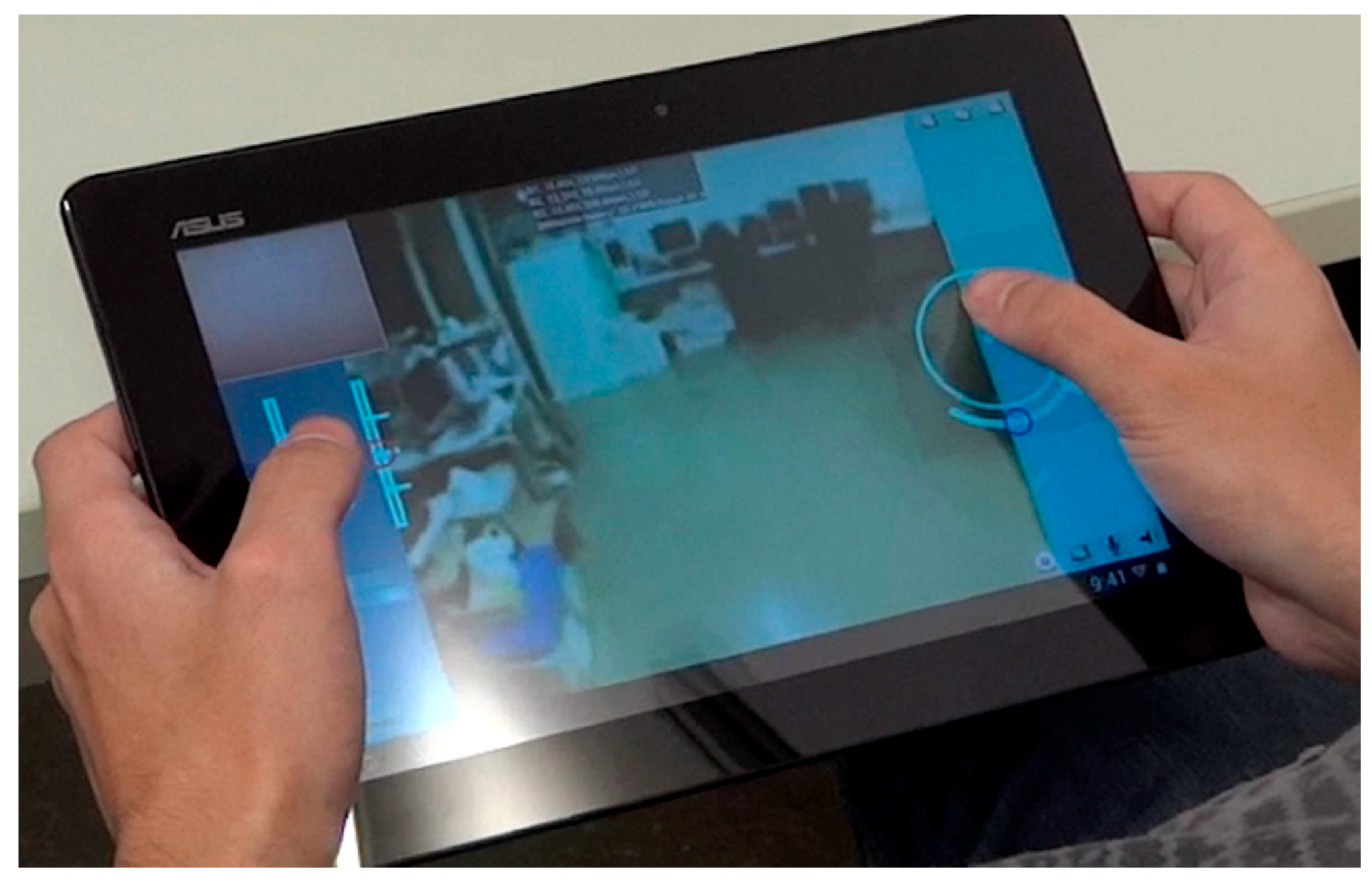
5.1. Preliminary Usability Test
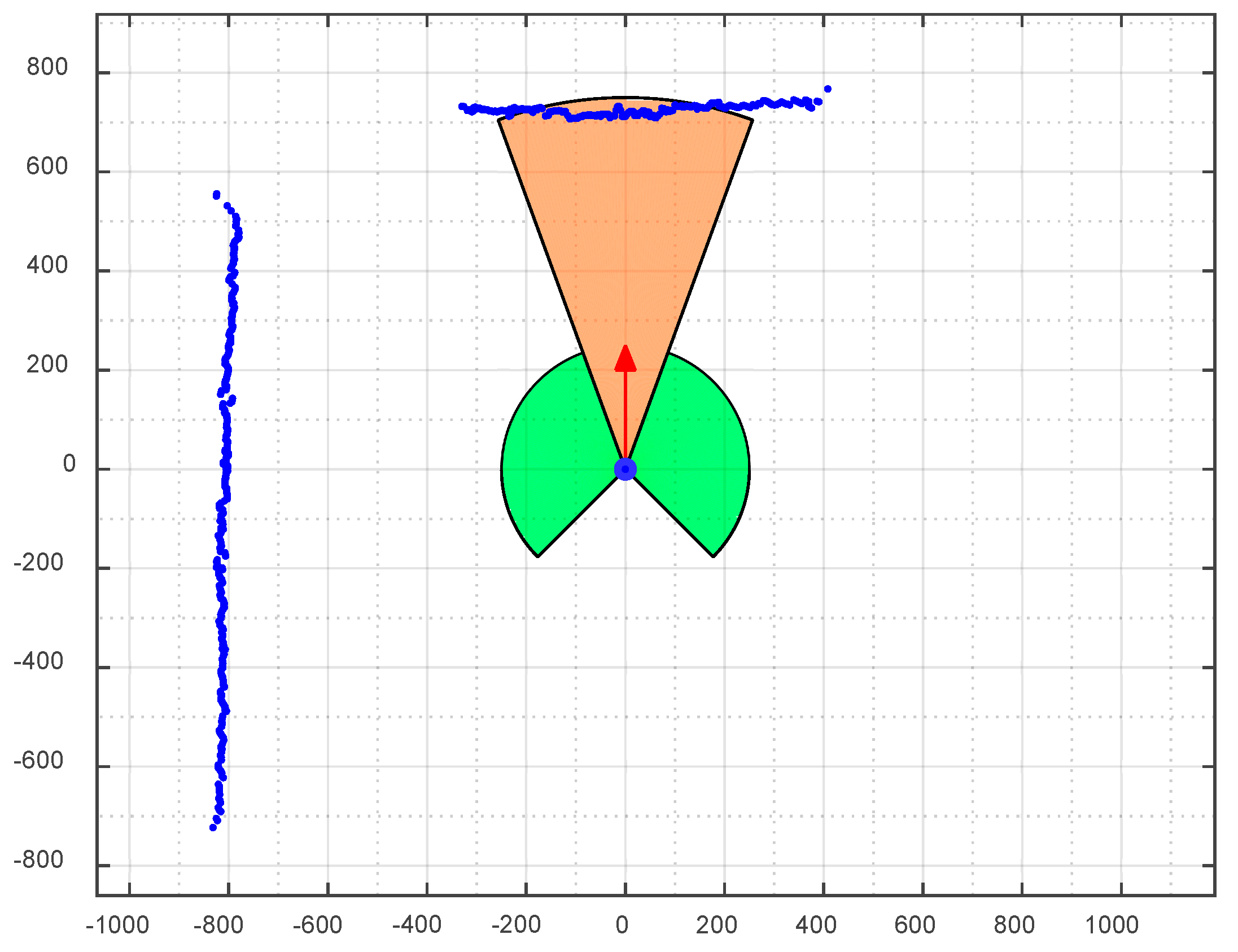
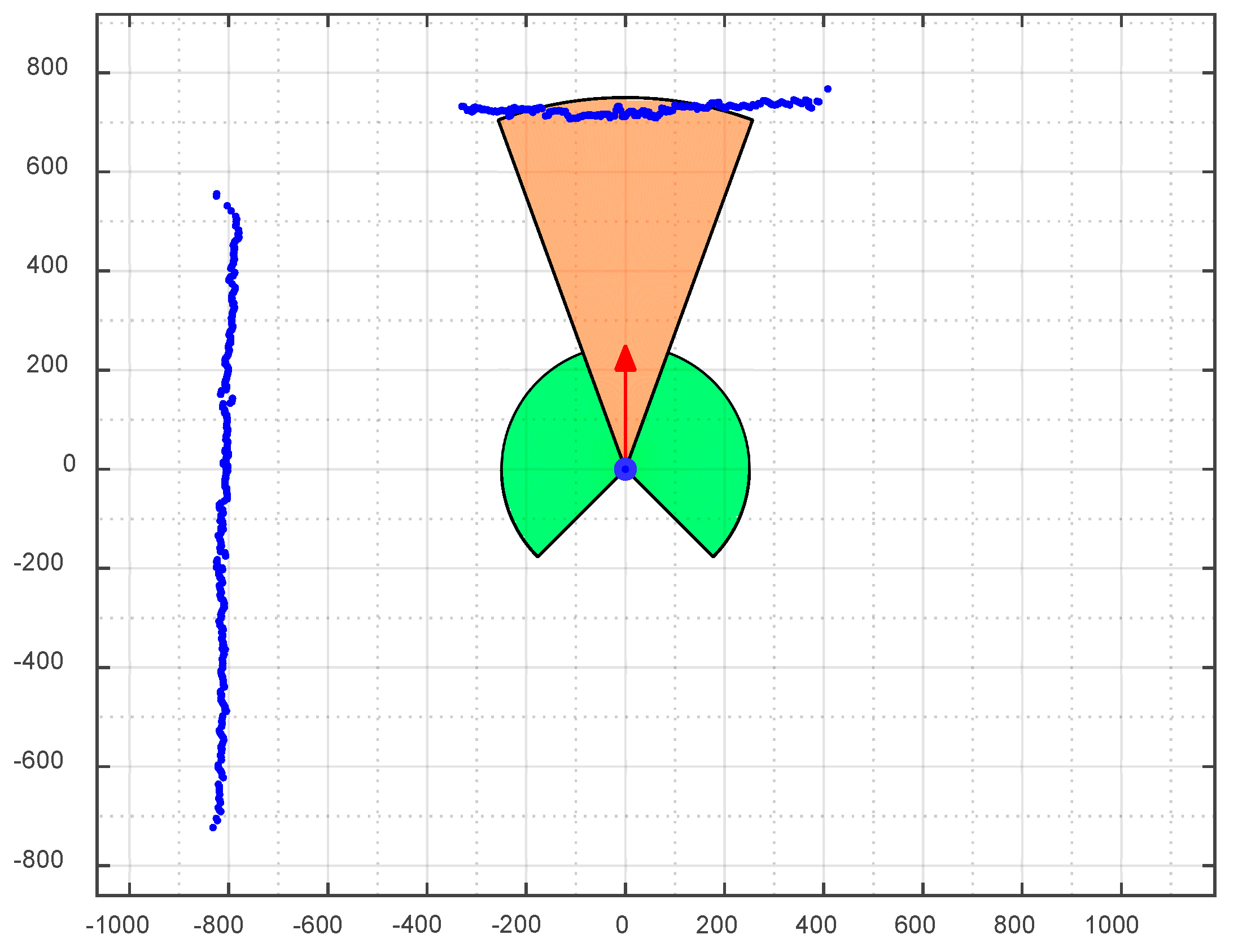
5.2. High-Priority Collision Avoidance System
6. Applications of the APR
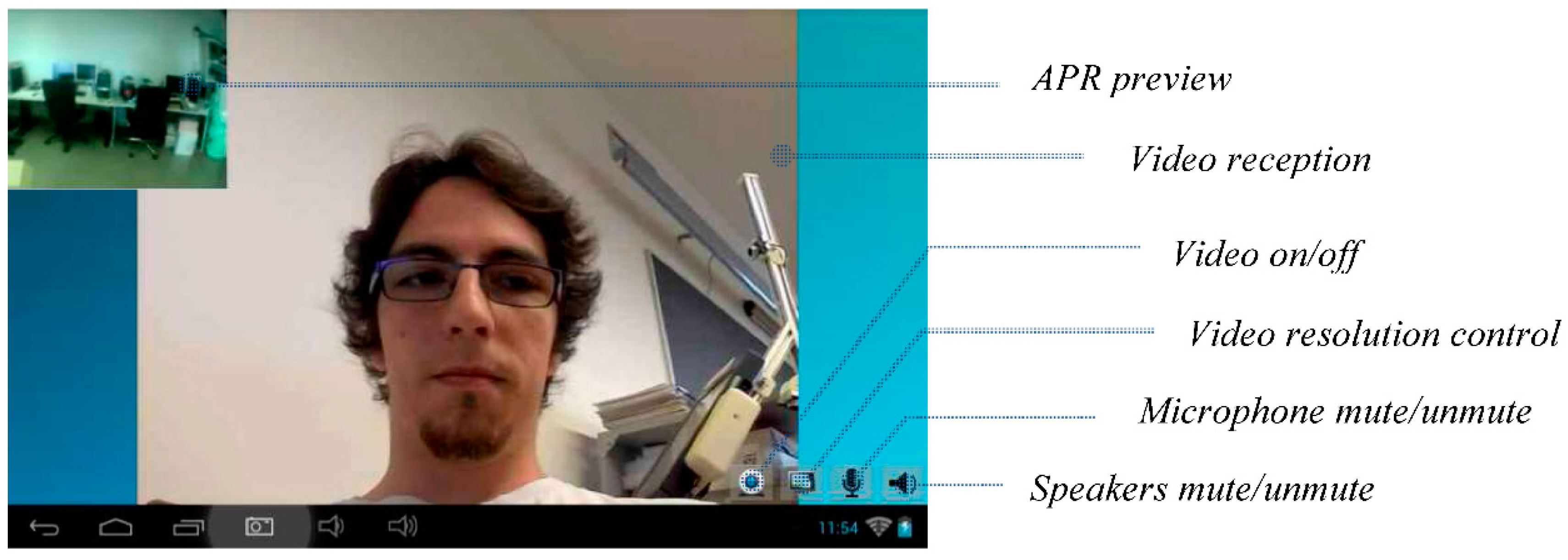
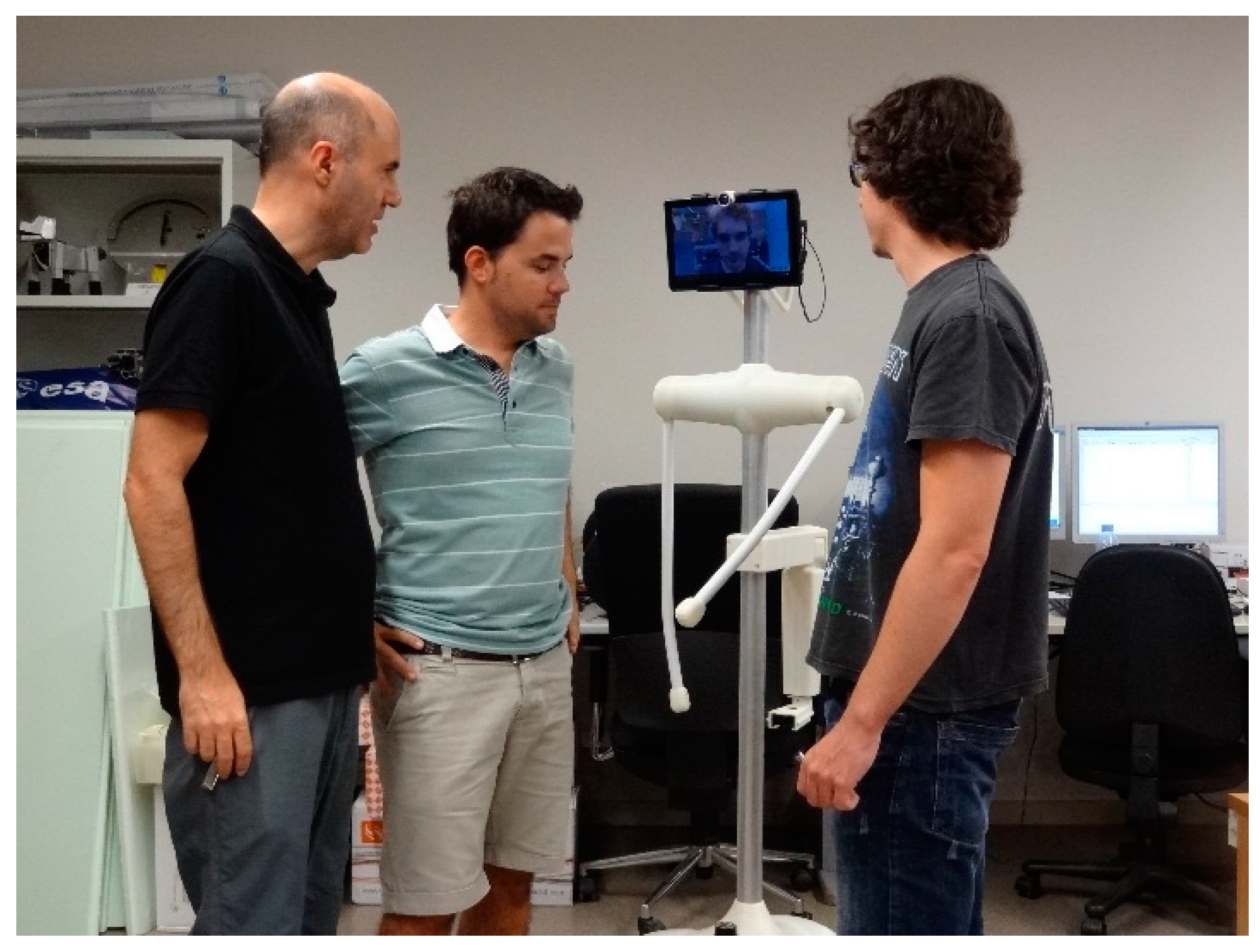
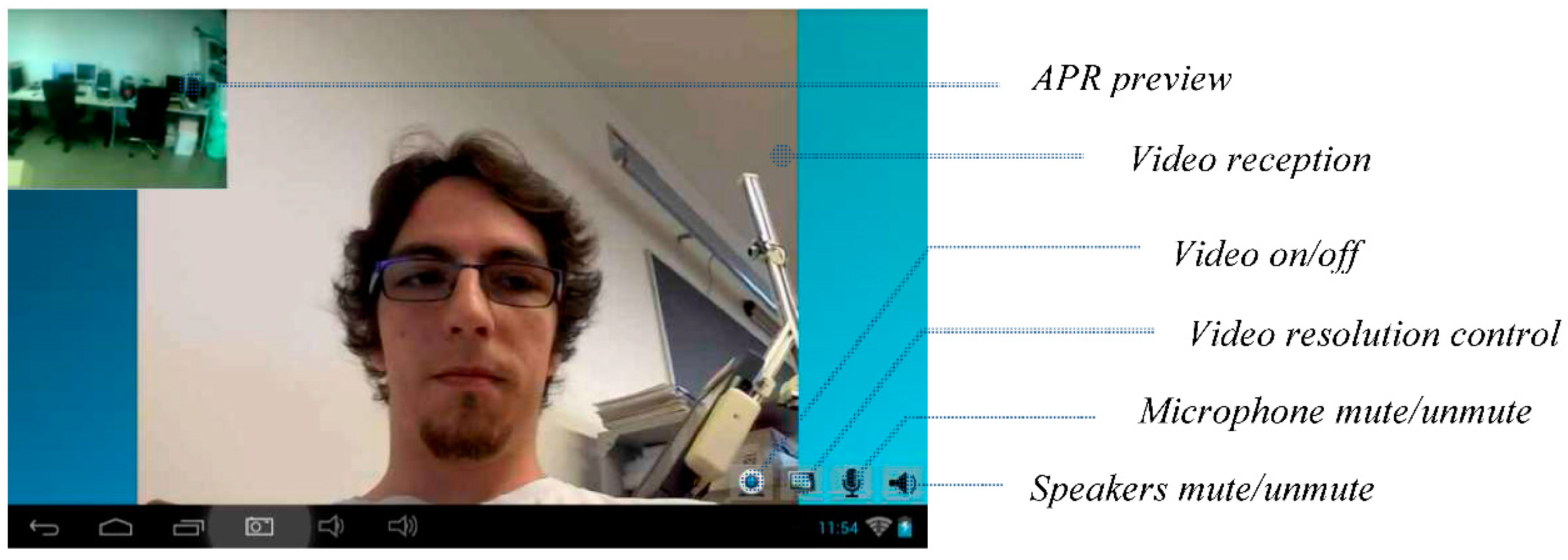
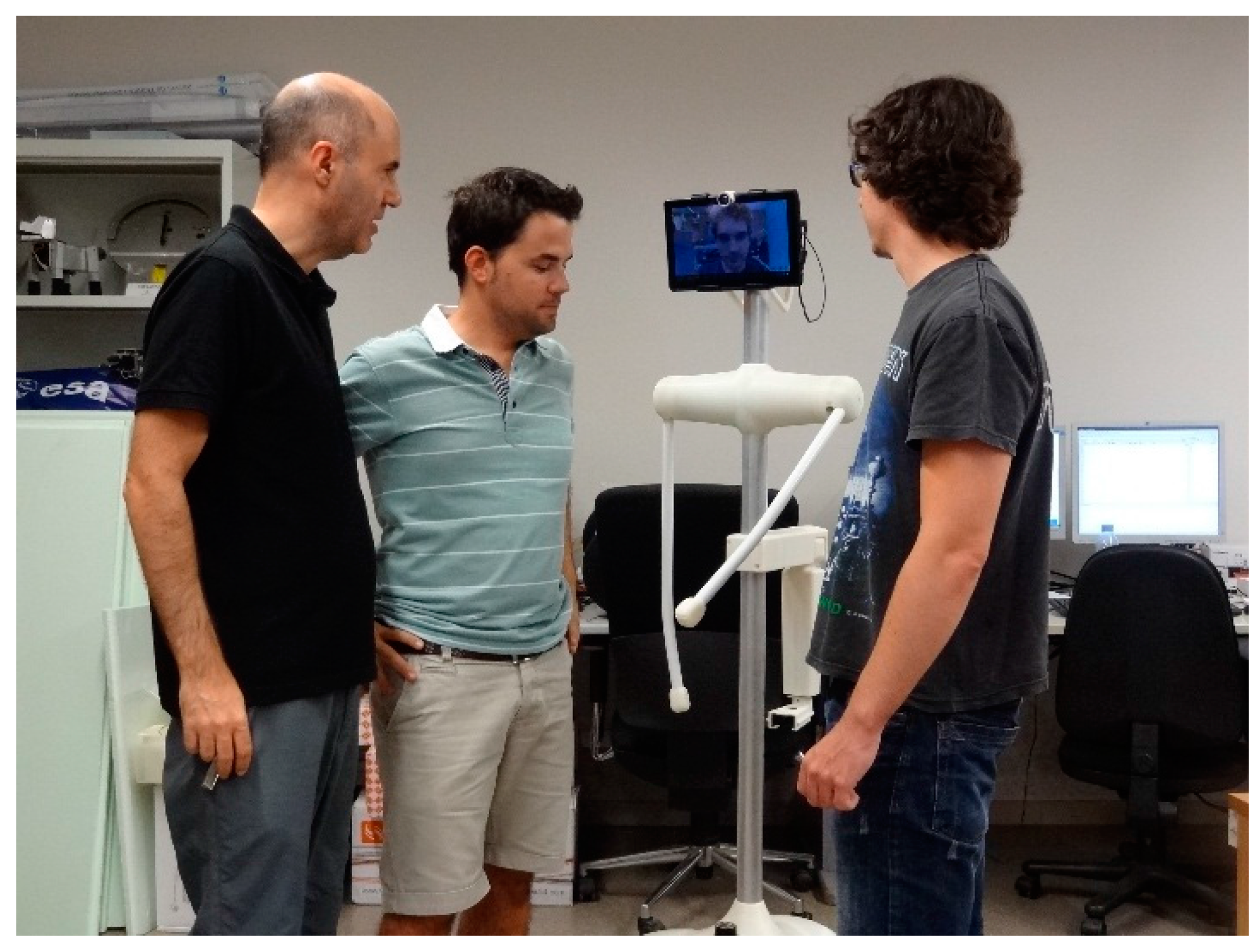
6.1. Mobile Videoconference Service
6.2. Mobile Telepresence Service
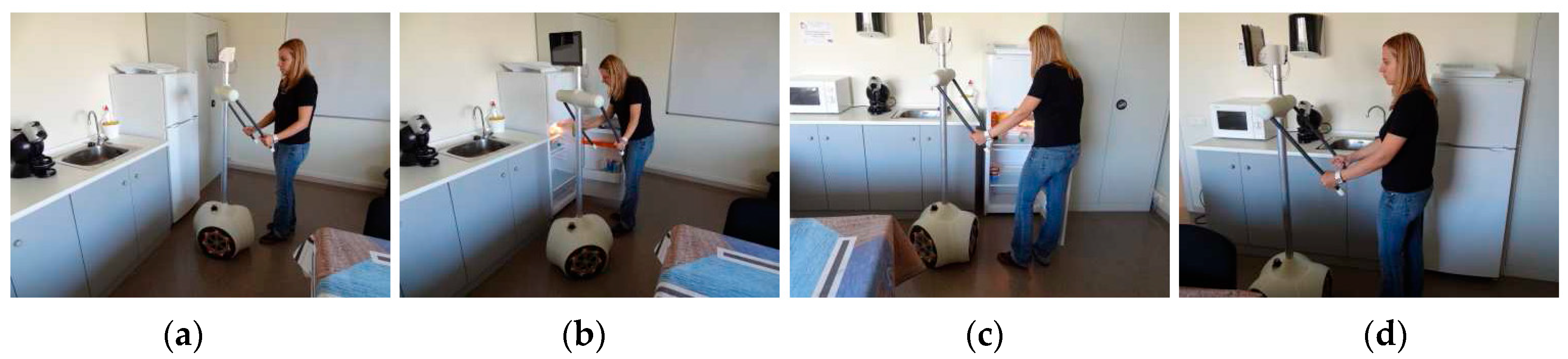
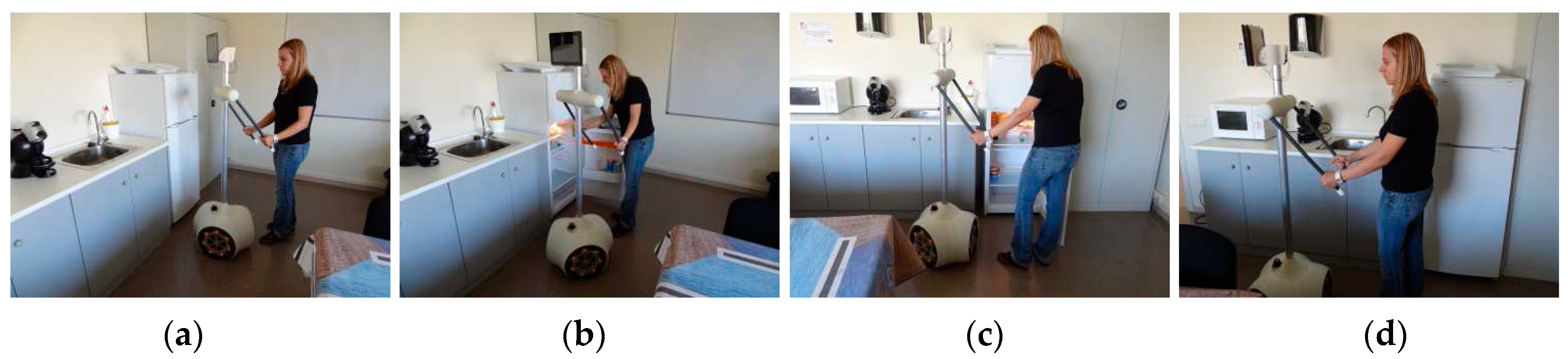
6.3. Walking Assistant Tool
6.4. Scheduling Tool
6.5. Fall Detection Tool
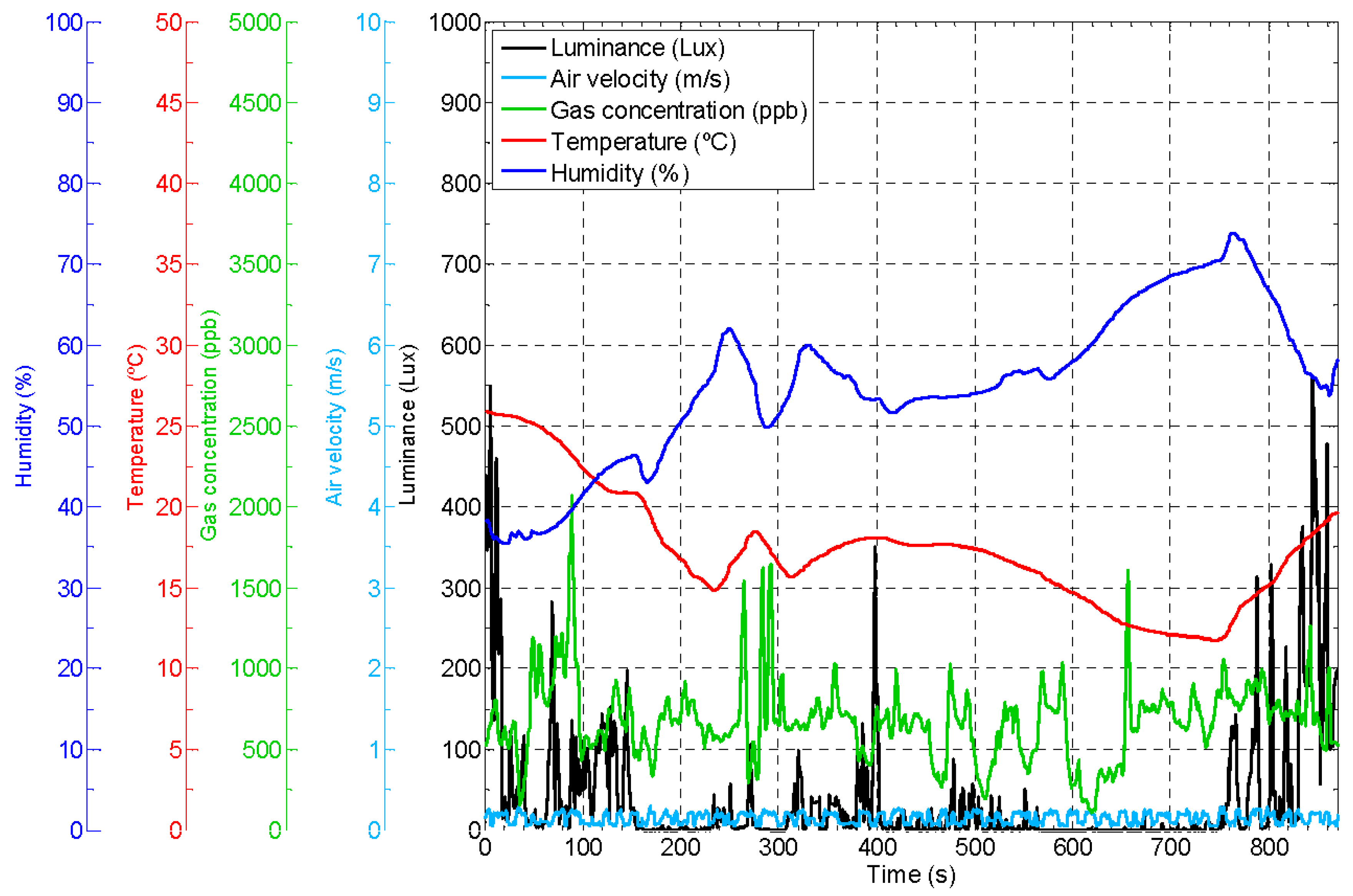
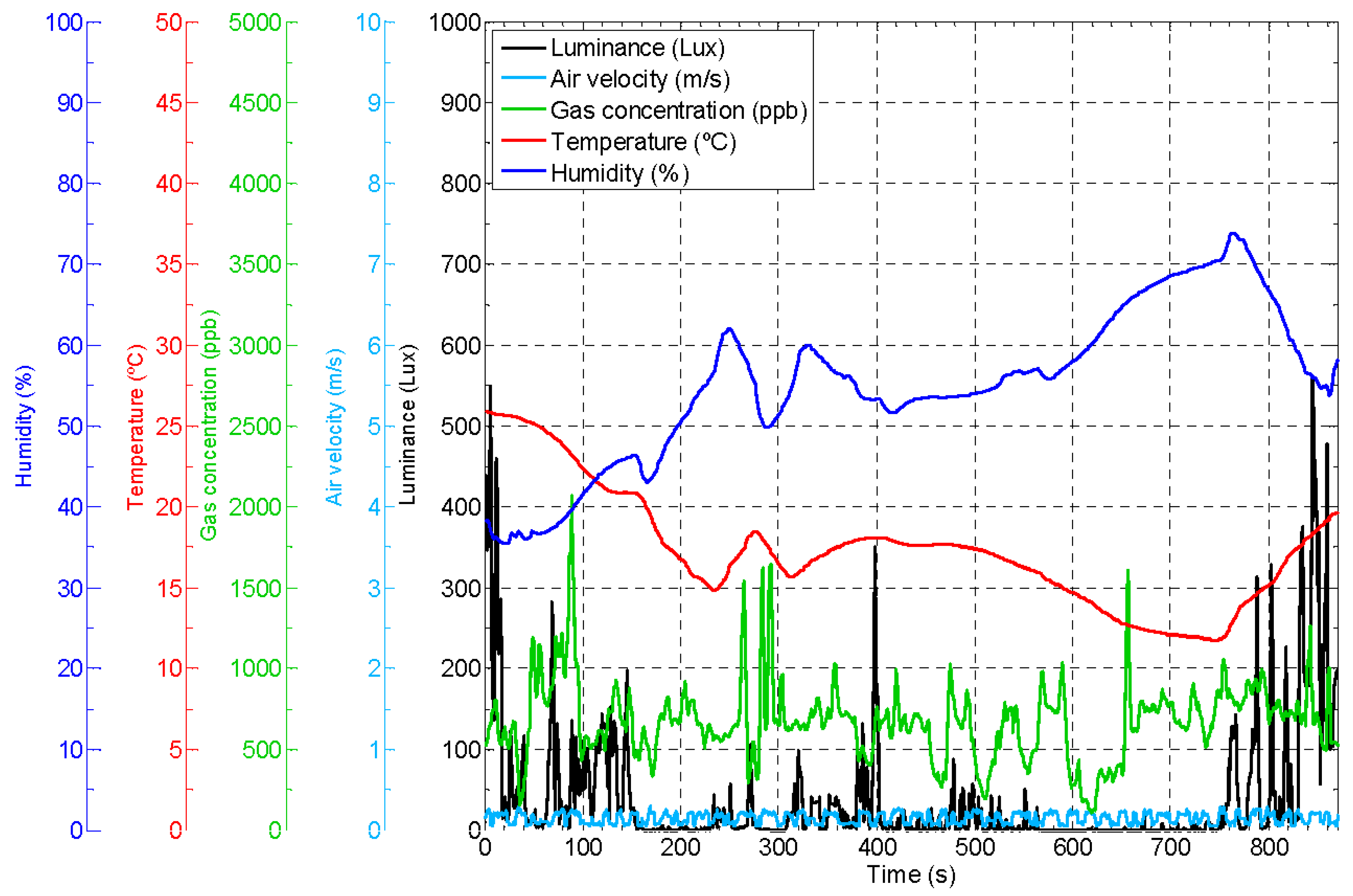
6.6. Mobile Ambient Monitoring Platform
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Desai, M.; Tsui, K.M.; Yanco, H.A.; Uhlik, C. Essential features of telepresence robots. In Proceedings of the 2011 IEEE Conference on Technologies for Practical Robot Applications, Woburn, MA, USA, 11–12 April 2011; pp. 15–20.
- United Nations. World Population Ageing 2013. Available online: http://www.un.org/en/development/desa/population/publications/pdf/ageing/WorldPopulationAgeing2013.pdf (accessed on 15 December 2015).
- World Health Organization. World Report on Ageing and Health. 2015. Available online: http://apps.who.int/iris/bitstream/10665/186463/1/9789240694811_eng.pdf (accessed on 18 February 2016).
- Delahoz, Y.S.; Labrador, M.A. Survey on Fall Detection and Fall Prevention Using Wearable and External Sensors. Sensors 2014, 14, 19806–19842. [Google Scholar] [CrossRef] [PubMed]
- Palmerini, L.; Bagalà, F.; Zanetti, A.; Klenk, J.; Becker, C.; Cappello, A. A Wavelet-Based Approach to Fall Detection. Sensors 2015, 15, 11575–11586. [Google Scholar] [CrossRef] [PubMed]
- Vermeersch, P.; Sampsel, D.D.; Kelman, C. Acceptability and usability of a telepresence robot for geriatric primary care: A pilot. Geriatr. Nurs. 2015, 36, 234–238. [Google Scholar] [CrossRef] [PubMed]
- Bevilacqua, R.; Cesta, A.; Cortellessa, G.; Macchione, A.; Orlandini, A.; Tiberio, L. Telepresence Robot at Home: A Long-Term Case Study. In Ambient Assisted Living; Springer International Publishing: New York, NY, USA, 2014; pp. 73–85. [Google Scholar]
- Kristoffersson, A.; Coradeschi, S.; Loutfi, A. A Review of Mobile Robotic Telepresence. Adv. Hum.-Comput. Interact. 2013. [Google Scholar] [CrossRef]
- Pineau, J.; Montemerlo, M.; Pollack, M.; Roy, N.; Thrun, S. Towards robotic assistants in nursing homes: Challenges and results. Robot. Auton. Syst. 2003, 42, 271–281. [Google Scholar] [CrossRef]
- Schroeter, C.; Muller, S.; Volkhardt, M.; Einhorn, E.; Bley, A.; Martin, C.; Langner, T.; Merten, M. Progress in developing a socially assistive mobile home robot companion for the elderly with mild cognitive impairment. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, CA, USA, 25–30 September 2011; pp. 2430–2437.
- Moyle, W.; Jones, C.; Cooke, M.; O’Dwyer, S.; Sung, B.; Drummond, S. Connecting the person with dementia and family: A feasibility study of a telepresence robot. BMC Geriatr. 2014, 14. [Google Scholar] [CrossRef] [PubMed]
- Palumbo, F.; Ullberg, J.; Štimec, A.; Furfari, F.; Karlsson, L.; Coradeschi, S. Sensor Network Infrastructure for a Home Care Monitoring System. Sensors 2014, 14, 3833–3860. [Google Scholar] [CrossRef] [PubMed]
- Tromp, A.M.; Pluijm, S.M.F.; Smit, J.H.; Deeg, D.J.H.; Boutera, L.M.; Lips, P. Fall-risk screening test: A prospective study on predictors for falls in community-dwelling elderly. J. Clin. Epidemiol. 2001, 54, 837–844. [Google Scholar] [CrossRef]
- Sadasivam, R.S.; Luger, T.M.; Coley, H.L.; Taylor, B.B.; Padir, T.; Ritchie, C.S.; Houston, T.K. Robot-assisted home hazard assessment for fall prevention: A feasibility study. J. Telemed. Telecare 2014, 20, 3–10. [Google Scholar] [CrossRef] [PubMed]
- Vellas, B.J.; Wayne, S.J.; ROMERO, L.J.; Baumgartner, R.N.; Garry, P.J. Fear of falling and restriction of mobility in elderly fallers. Age Ageing 1997, 26, 189–193. [Google Scholar] [CrossRef] [PubMed]
- Palleja, T.; Guillamet, A.; Tresanchez, M.; Teixido, M.; Fernandez del Viso, A.; Rebate, C.; Palacin, J. Implementation of a robust absolute virtual head mouse combining face detection, template matching and optical flow algorithms. Telecommun. Syst. 2013, 52, 1479–1489. [Google Scholar] [CrossRef]
- Khan, A.; Sun, L.; Ifeachor, E.; Fajardo, J.O.; Liberal, F. Video Quality Prediction Model for H.264 Video over UMTS Networks and Their Application in Mobile Video Streaming. In Proceedings of the IEEE International Conference on Communications (ICC), Cape Town, South Africa, 23–27 May 2010; pp. 1–5.
- Ford, B.; Srisuresh, P.; Kegel, D. Peer-to-Peer Communication across Network Address Translators. In Proceedings of the 2005 USENIX Annual Technical Conference, Anaheim, CA, USA, 10–15 April 2005; pp. 179–192.
- Halkes, G.; Pouwelse, J. UDP NAT and Firewall Puncturing in the Wild. In Networking 2011, Proceedings of the 10th international IFIP TC 6 conference on Networking, Valencia, Spain, 9–13 May 2011; pp. 1–12.
- Tsui, K.M.; Dalphond, J.M.; Brooks, D.J.; Medvedev, M.S.; McCann, E.; Allspaw, J.; Kontak, D.; Yanco, H.A. Accessible Human-Robot Interaction for Telepresence Robots: A Case Study. Paladyn J. Behav. Robot. 2015, 6, 1–29. [Google Scholar] [CrossRef]
- Pai, N.-S.; Hsieh, H.-H.; Lai, Y.-C. Implementation of Obstacle-Avoidance Control for an Autonomous Omni-Directional Mobile Robot Based on Extension Theory. Sensors 2012, 12, 13947–13963. [Google Scholar] [CrossRef] [PubMed]
- Clotet, E.; Martínez, D.; Moreno, J.; Tresanchez, M.; Palacín, J. Collision Avoidance System with Deceleration Control Applied to an Assistant Personal Robot. Trends Pract. Appl. Agents Multi-Agent Syst. Sustain. 2015, 372, 227–228. [Google Scholar]
- Almasri, M.; Elleithy, K.; Alajlan, A. Sensor Fusion Based Model for Collision Free Mobile Robot Navigation. Sensors 2016, 16. [Google Scholar] [CrossRef] [PubMed]
- Tsui, K.M.; McCann, E.; McHugh, A.; Medvedev, M.; Yanco, H.A. Towards designing telepresence robot navigation for people with disabilities. Int. J. Intell. Comput. Cybern. 2014, 7, 307–344. [Google Scholar]
- Wandosell, J.M.H.; Graf, B. Non-Holonomic Navigation System of a Walking-Aid Robot. In Proceedings of the 11th IEEE International Workshop on Robot and Human Interactive Communication, Berlin, Germany, 25–27 September 2002; pp. 518–523.
- Shi, F.; Cao, Q.; Leng, C.; Tan, H. Based On Force Sensing-Controlled Human-Machine Interaction System for Walking Assistant Robot. In Proceedings of the 8th World Congress on Intelligent Control and Automation, Jinan, China, 7–9 July 2010; pp. 6528–6533.
- Pollack, M.E.; Brown, L.; Colbry, D.; McCarthy, C.E.; Orosz, C.; Peintner, B.; Ramakrishnan, S.; Tsamardinos, I. Autominder: An intelligent cognitive orthotic system for people with memory impairment. Robot. Auton. Syst. 2003, 44, 273–282. [Google Scholar] [CrossRef]
- De Benedictis, R.; Cesta, A.; Coraci, L.; Cortellessa, G.; Orlandini, A. Adaptive Reminders in an Ambient Assisted Living Environment. Ambient Assist. Living Biosyst. Biorobot. 2015, 11, 219–230. [Google Scholar]
- Martinez, D.; Teixidó, M.; Font, D.; Moreno, J.; Tresanchez, M.; Marco, S.; Palacín, J. Ambient Intelligence Application Based on Environmental Measurements Performed with an Assistant Mobile Robot. Sensors 2014, 14, 6045–6055. [Google Scholar] [CrossRef] [PubMed]
- Martinez, D.; Moreno, J.; Tresanchez, M.; Clotet, E.; Jiménez-Soto, J.M.; Magrans, R.; Pardo, A.; Marco, S.; Palacín, J. Measuring Gas Concentration and Wind Intensity in a Turbulent Wind Tunnel with a Mobile Robot. J. Sens. 2016, 2016. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TAG | Description | TAG | Description |
|---|---|---|---|
| CN1 | Connector for battery 1. | M6 | Connector for the Head Pan motor. |
| CN2 | Connector for battery 2. | M7 | Connector for the Head Tilt motor. |
| CN3 | Connector for battery 3. | M8 | Unused. |
| M1 | Connector for the front left wheel motor. | USB1 | Micro-USB “On the Go” connector. |
| M2 | Connector for the front right wheel motor. | LASER | Connector for a Hokuyo LIDAR device |
| M3 | Connector for the back wheel motor. | BMON1 | Connector to monitor battery 1. |
| M4 | Connector for the Left Arm motor. | BMON2 | Connector to monitor battery 2. |
| M5 | Connector for the Right Arm motor. | BMON3 | Connector to monitor battery 3. |
| Motion | Battery 1 (mA) | Battery 2 (mA) | Battery 3 (mA) | Total (mA) |
|---|---|---|---|---|
| Standby | 5 | 5 | 480 | 490 |
| Stopped | 5 | 5 | 890 | 900 |
| Go Forward | 700 | 803 | 1202 | 2705 |
| Go Backward | 934 | 951 | 880 | 2765 |
| Rotate (left/right) | 120 | 97 | 976 | 1193 |
| Move right | 176 | 194 | 1582 | 1952 |
| Move left | 154 | 181 | 1447 | 1782 |
| ID | Head Pan | Head Tilt | Left Arm | Right Arm | Module | Angle | Rotation |
|---|---|---|---|---|---|---|---|
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
| Command | Parameters | Description |
|---|---|---|
| AL d\r | d: from −45 to 45° | Moves the left arm to the specified position in degrees. |
| AR d\r | d: from −45 to 45° | Moves the right arm to the specified position in degrees. |
| HP d\r | d: from −60 to 60° | Rotates the head of the robot to the specified position in degrees. |
| HT d\r | d: from 0 to 90° | Tilts the head of the robot to the specified position in degrees. |
| M S1S2S3\r | S1: PWM from 0 to 60% S2: PWM from 0 to 20% S3: PWM from 0 to 20% | Fixes the Pulse Width Modulation (PWM) applied to motors M1, M2 and M3 of the APR. |
| MF S\r | S: PWM from 0 to 60% | Applies electric braking to M3 and fixes the same PWM to M1 and M2 to generate a forward displacement. |
| MB S\r | S: PWM from 0 to 60% | Applies electric braking to M3 and fixes the same PWM to M1 and M2 to generate a backward displacement. |
| TL S\r | S: PWM from 0 to 20% | Fixes the same PWM to M1, M2 and M3 to rotate the robot to the left. |
| TR S\r | S: PWM from 0 to 20% | Fixes the same PWM to M1, M2 and M3 to rotate the robot to the right. |
| Color Image | JPEG Compression | |||||
|---|---|---|---|---|---|---|
| Resolution (Pixels W × H) | RGB Size (Bytes) | YUV-NV21 Size (Bytes) | JPEG Quality (%) | JPEG Size (Bytes) | Compression Time (ms) | Fps (max) |
| 176 × 144 | 76,032 | 50,688 | 30 | 1233 | 12.46 | 80 |
| 176 × 144 | 76,032 | 50,688 | 60 | 1391 | 11.74 | 85 |
| 176 × 144 | 76,032 | 50,688 | 100 | 11,911 | 16.50 | 60 |
| 320 × 240 | 230,400 | 153,600 | 30 | 2280 | 19.96 | 50 |
| 320 × 240 | 230,400 | 153,600 | 60 | 2718 | 19.51 | 51 |
| 320 × 240 | 230,400 | 153,600 | 100 | 33,617 | 24.74 | 40 |
| 640 × 480 | 921,600 | 614,400 | 30 | 6351 | 29.90 | 33 |
| 640 × 480 | 921,600 | 614,400 | 60 | 7526 | 30.26 | 33 |
| 640 × 480 | 921,600 | 614,400 | 100 | 115,491 | 55.14 | 18 |
| 720 × 480 | 1,036,800 | 691,200 | 30 | 7618 | 32.54 | 30 |
| 720 × 480 | 1,036,800 | 691,200 | 60 | 9316 | 31.86 | 31 |
| 720 × 480 | 1,036,800 | 691,200 | 100 | 126,430 | 61.68 | 16 |
| 1280 × 720 | 2,764,800 | 1,843,200 | 30 | 17,810 | 72.47 | 13 |
| 1280 × 720 | 2,764,800 | 1,843,200 | 60 | 21,230 | 72.87 | 13 |
| 1280 × 720 | 2,764,800 | 1,843,200 | 100 | 311,409 | 131.72 | 7 |
| 1280 × 960 | 3,686,400 | 2,457,600 | 30 | 23,699 | 96.58 | 10 |
| 1280 × 960 | 3,686,400 | 2,457,600 | 60 | 28,647 | 98.02 | 10 |
| 1280 × 960 | 3,686,400 | 2,457,600 | 100 | 426,045 | 177.25 | 5 |
| Tag | Type | Provided by | Description |
|---|---|---|---|
| Role | String | Device APP | A string containing the role of the device connected to the server (service or robot) |
| Name | String | Configuration | A string containing the name of the robot or service. If no name is specified, the string “Default” is used as a name. |
| NAT Port | Integer | Network protocol | Network Address Translation (NAT) port assigned to the communication |
| IP Address | InetAddress | Network protocol | The IP address of the device that requested the connection (external IP) |
| Local IP Address | String | Device APP | The IP address of the device that requested the connection (internal IP) |
| RFC1918 Name | First Available IP | Last Available IP |
|---|---|---|
| 24-bit block | 10.0.0.0 | 10.255.255.255 |
| 20-bit block | 172.16.0.0 | 172.31.255.255 |
| 16-bit block | 192.168.0.0 | 192.168.255.255 |
| Relative APR Forward Speed (%) | Radius of the Frontal Safety Area (cm) | Distance APR-Obstacle When Stopped (cm) |
|---|---|---|
| 100 | 120.0 | 22.5 |
| 88 | 108.6 | 23.0 |
| 75 | 96.4 | 26.3 |
| 66 | 86.7 | 25.5 |
| 50 | 72.3 | 30.8 |
| 33 | 56.3 | 29.0 |
| 25 | 48.9 | 30.2 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Clotet, E.; Martínez, D.; Moreno, J.; Tresanchez, M.; Palacín, J. Assistant Personal Robot (APR): Conception and Application of a Tele-Operated Assisted Living Robot. Sensors 2016, 16, 610. https://doi.org/10.3390/s16050610
Clotet E, Martínez D, Moreno J, Tresanchez M, Palacín J. Assistant Personal Robot (APR): Conception and Application of a Tele-Operated Assisted Living Robot. Sensors. 2016; 16(5):610. https://doi.org/10.3390/s16050610
Chicago/Turabian StyleClotet, Eduard, Dani Martínez, Javier Moreno, Marcel Tresanchez, and Jordi Palacín. 2016. "Assistant Personal Robot (APR): Conception and Application of a Tele-Operated Assisted Living Robot" Sensors 16, no. 5: 610. https://doi.org/10.3390/s16050610
APA StyleClotet, E., Martínez, D., Moreno, J., Tresanchez, M., & Palacín, J. (2016). Assistant Personal Robot (APR): Conception and Application of a Tele-Operated Assisted Living Robot. Sensors, 16(5), 610. https://doi.org/10.3390/s16050610