
Fuzzy Logic-Based Guaranteed Lifetime Protocol for Real-Time Wireless Sensor Networks

Abstract
:1. Introduction
2. Related Works
3. Proposed Scheme for Guaranteeing Network Lifetime
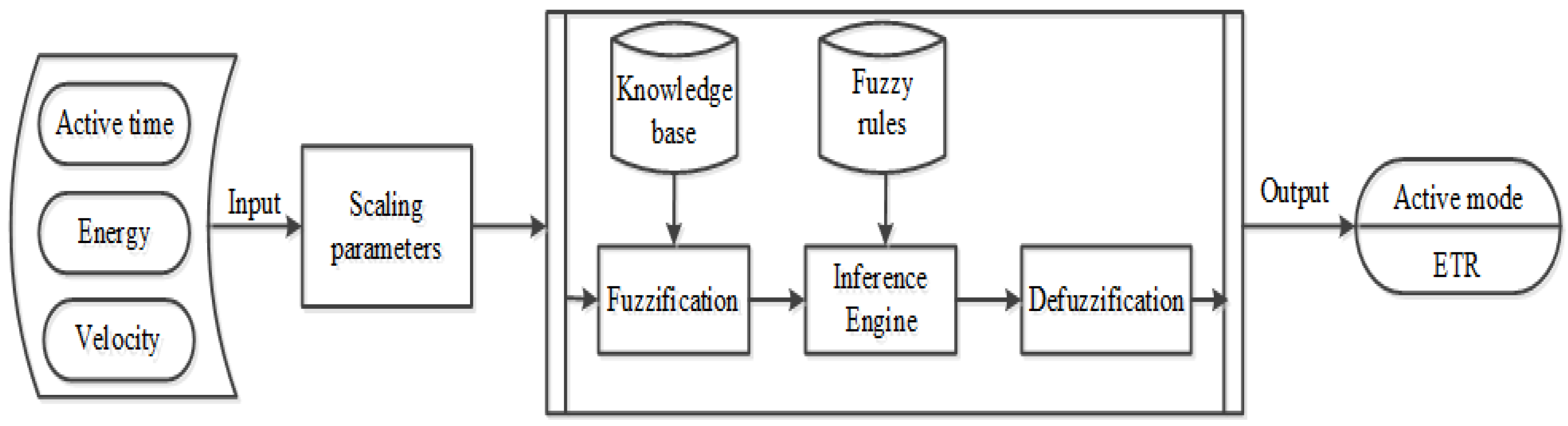
4. Fuzzy Logic Model
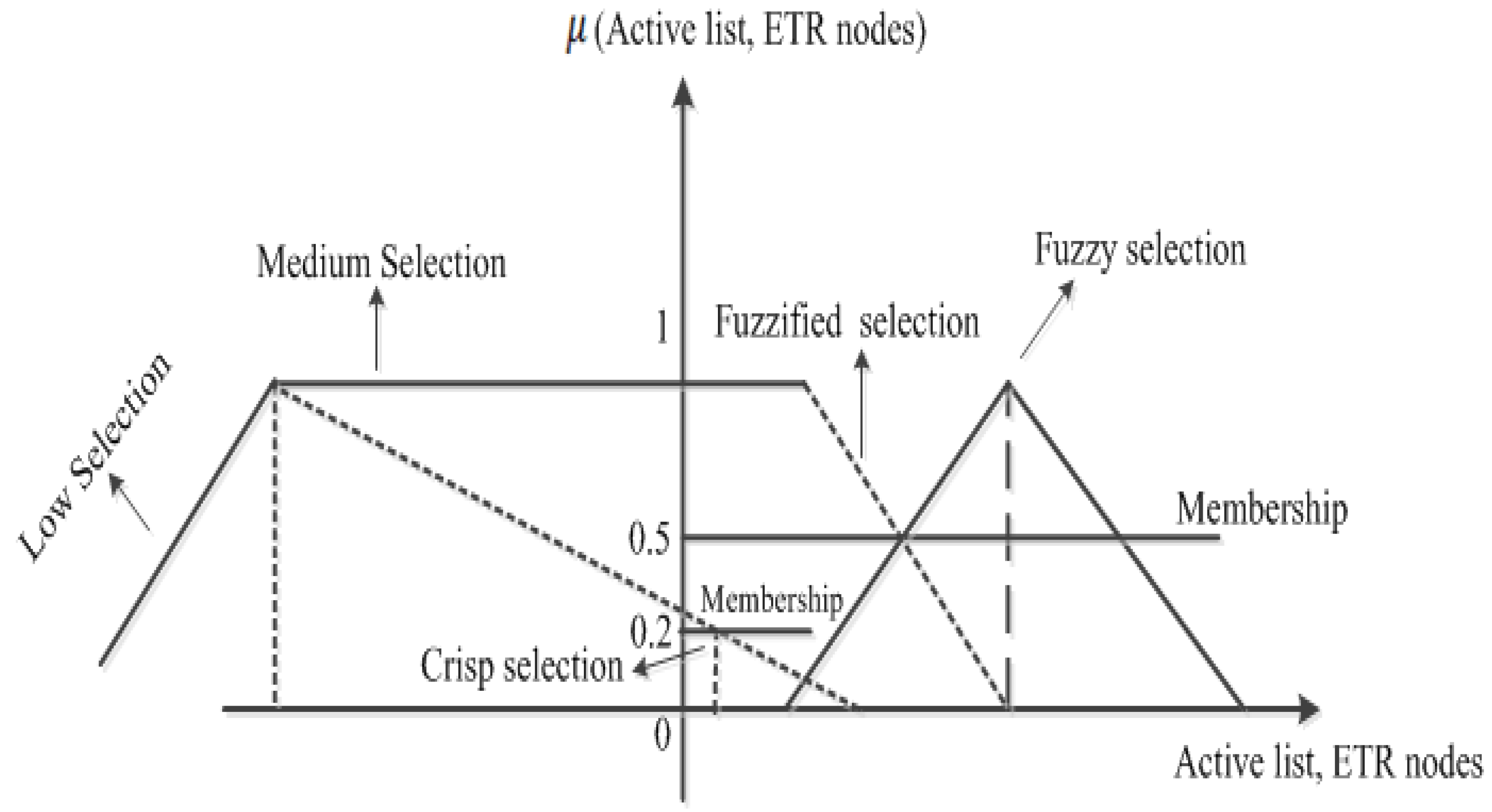
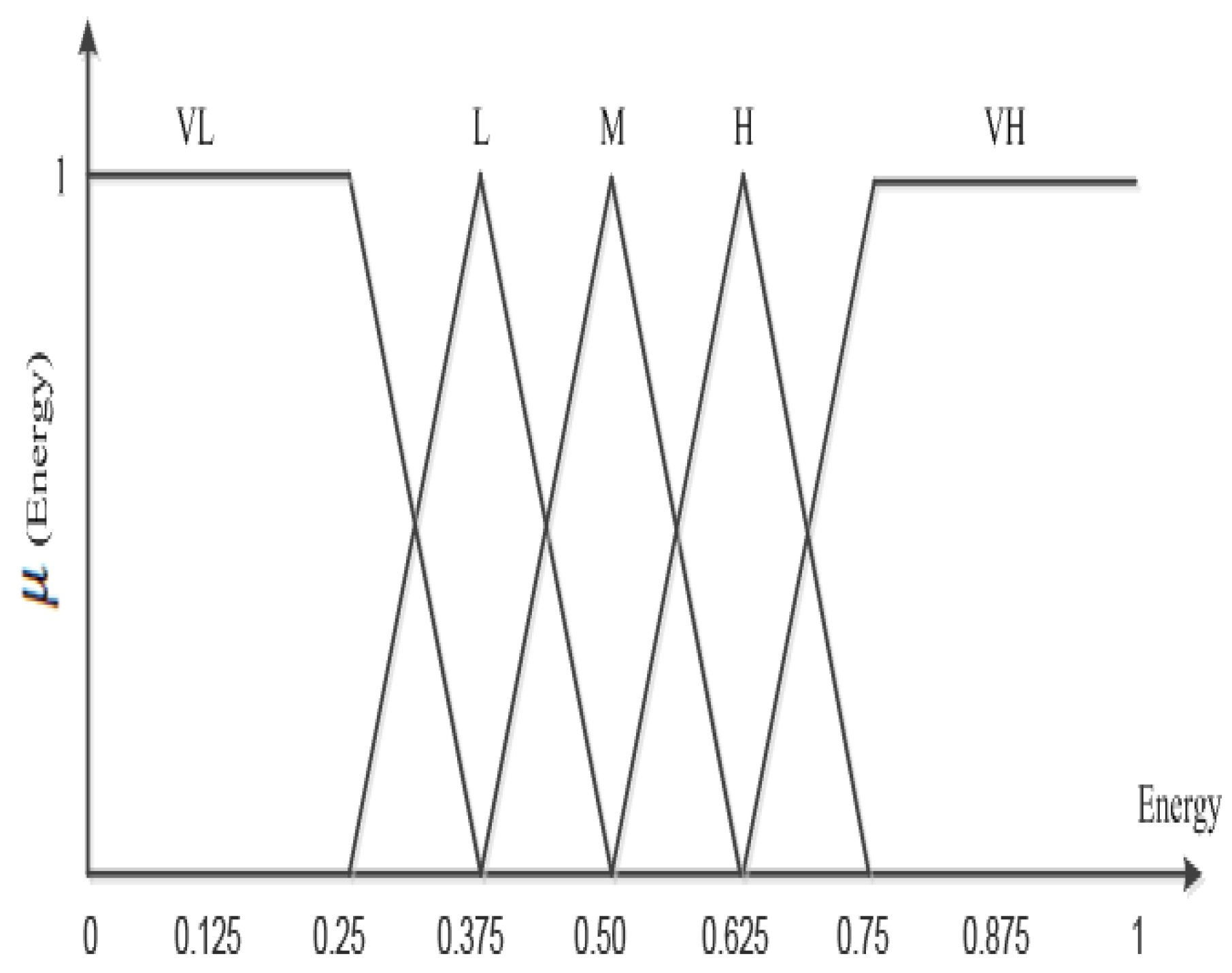
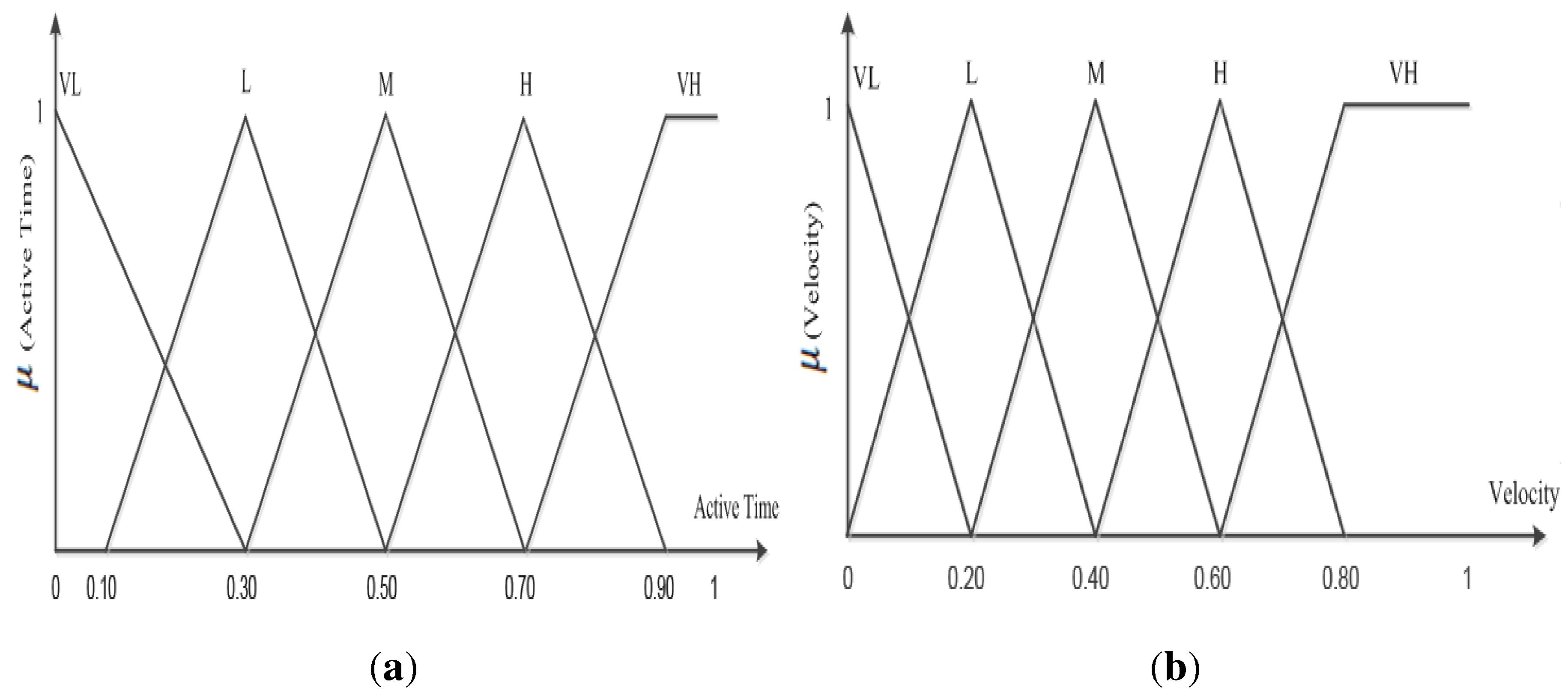
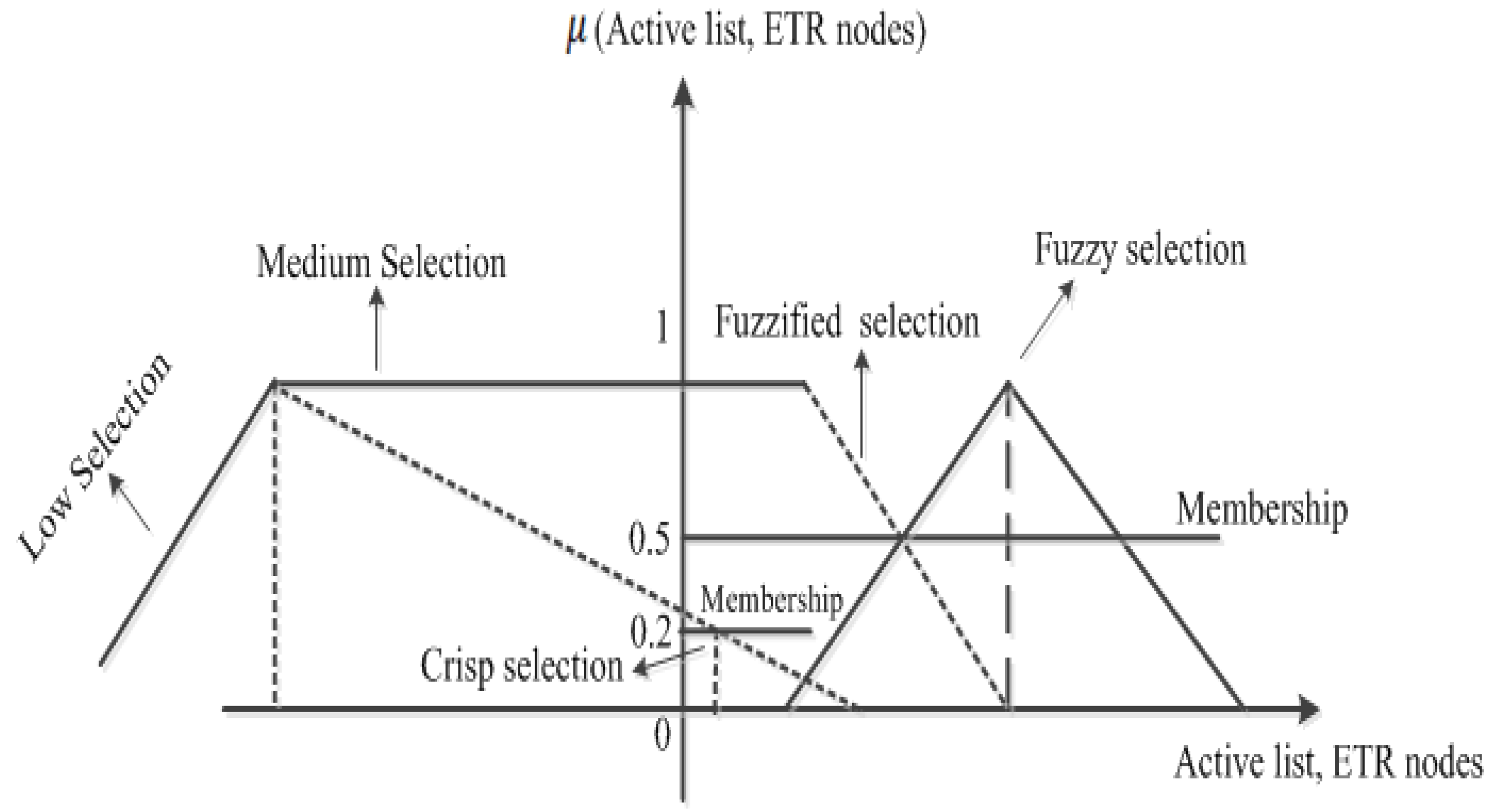
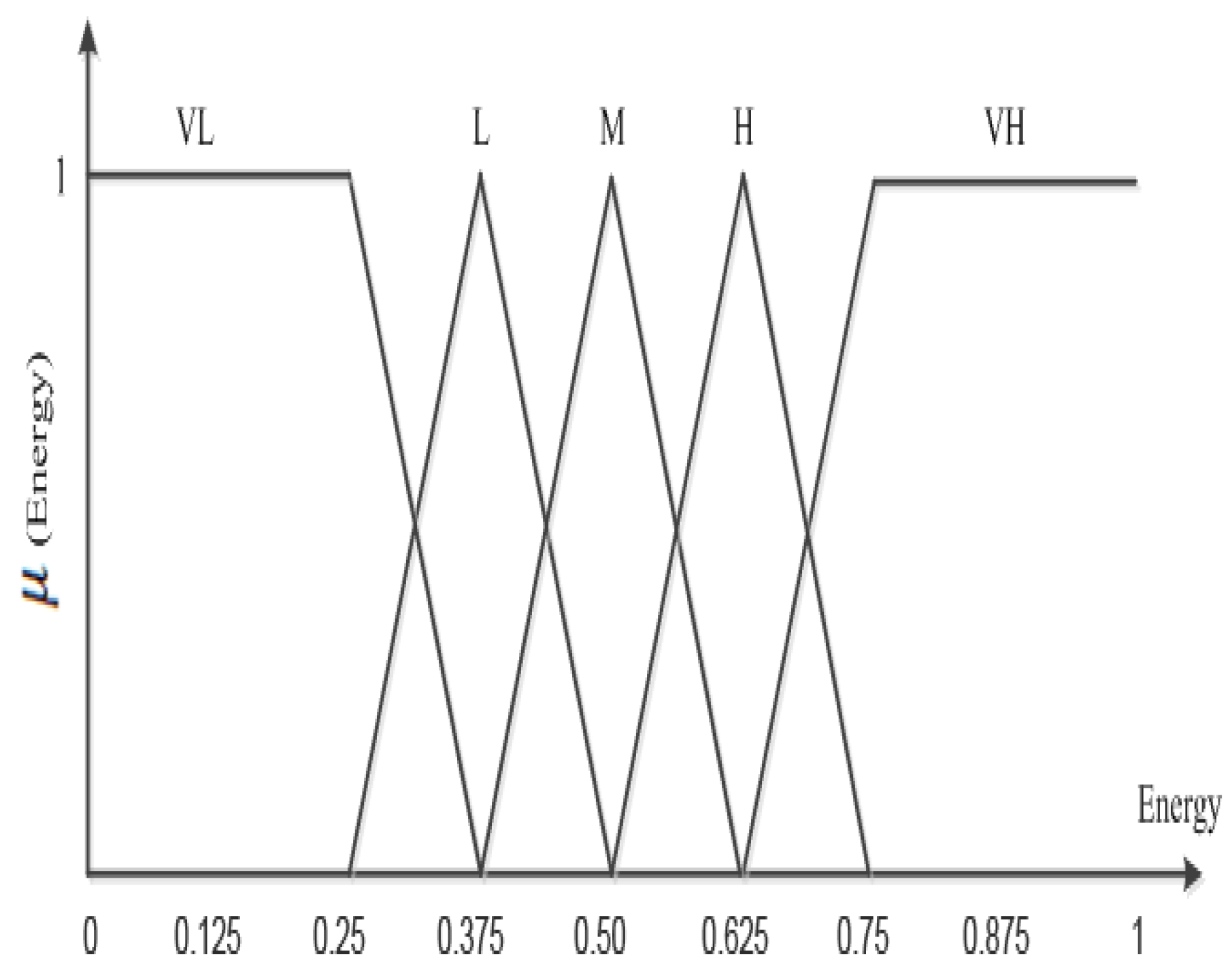
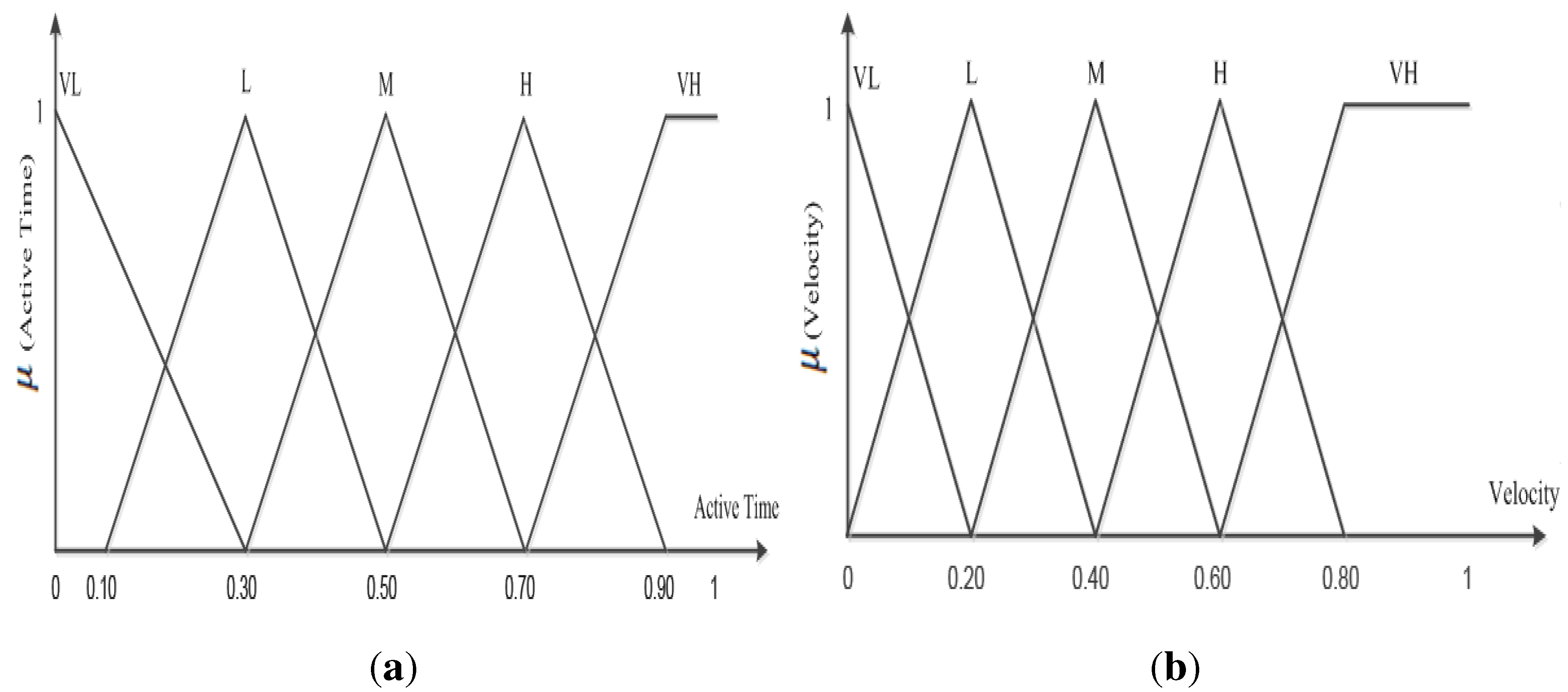
4.1. Fuzzification
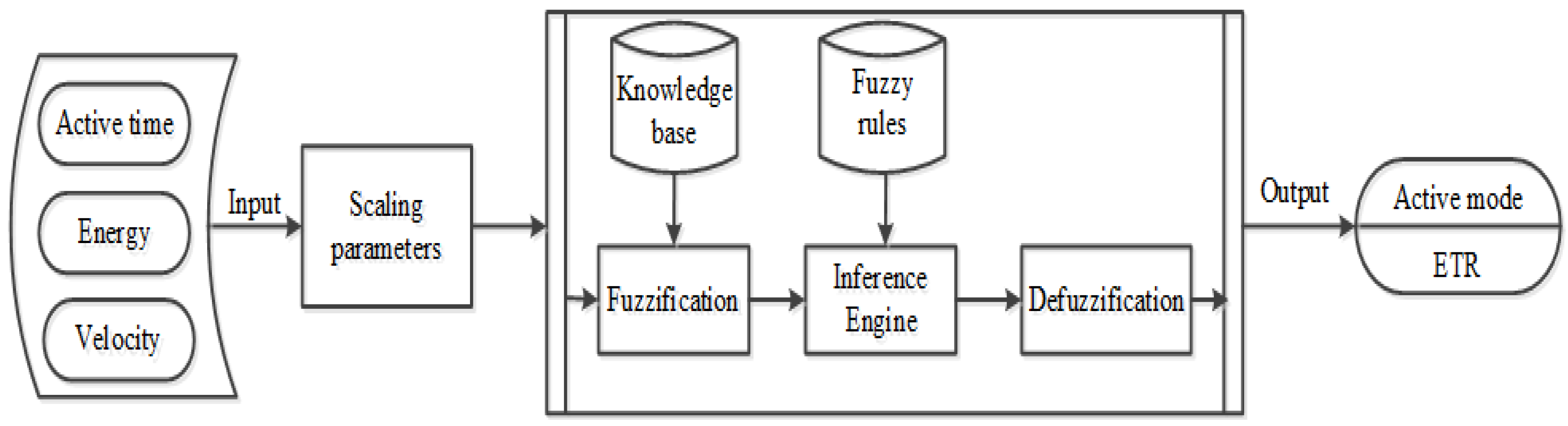
4.2. Inference Engine
4.2.1. Inference Rules for Active and ETR Node Selection

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rules | Energy | Atime | Velocity | Active Mode | ETR |
|---|---|---|---|---|---|
| 1 | L | ||||
| 2 | L | L | |||
| 3 | M | M | |||
| 4 | H | H | |||
| 5 | L | ||||
| 6 | L | M | |||
| 7 | L | L | L | M | |
| 8 | L | M | M | L | L |
| 9 | L | H | H | L | M |
| 10 | L | H | |||
| 11 | M | ||||
| 12 | M | L | L | H | |
| 13 | M | M | M | M | L |
| 14 | M | H | H | M | H |
| 15 | M | L | H | ||
| 16 | H | ||||
| 17 | H | L | L | L | |
| 18 | H | M | M | H | L |
| 19 | H | H | H | H | H |
| 20 | H | M | H | ||
| 21 | |||||
| 22 | L | L | L | ||
| 23 | M | M | H | M | |
| 24 | H | H | H | ||
| 25 | M |
4.2.2. Energy-Aware Three-Tiered Node Selection
- Select node j having maximum remaining energy RE as the NTR relay node from active set X;
- For each sensor node , there is at least one NTR relay node , such that ;
- Each NTR relay node ∈ Y must be connected with at least one other NTR relay node toward the sink. Thus, the graph ) is said to be connected if the vertex set of G is V = Y and the edge set of G is;
- Select node k having a maximum remaining energy RE as the ETR relay node from the active set X;
- For each NTR relay node , there is at least one ETR relay node , such that ;
- Each ETR relay node ∈Z must be connected to at least one other ETR relay node toward the sink. Thus, the graph ) is said to be connected if the vertex set of G is V = Z and the edge set of G is:
4.3. Defuzzification
5. Performance Evaluation
| Sensing field dimensions | 400 × 400 m |
| Number of sensor nodes | 100 |
| Node placement | Random |
| Initial energy of each node | 300 J |
| Sensing power | 0.350 W |
| Listening power | 0.320 W |
| Transmitting power | NTR = 0.550 W, ETR = 0.700 W |
| Receiving power | 0.400 W |
| Sleeping power | 0.001 W |
| Sensing frequency | 0.1 Hz |
| Radio transmission range | (60,130) m |
| Packet size | 50 bytes |
| Maximum rounds | 10 |
5.1. Analysis for Guaranteed Lifetime

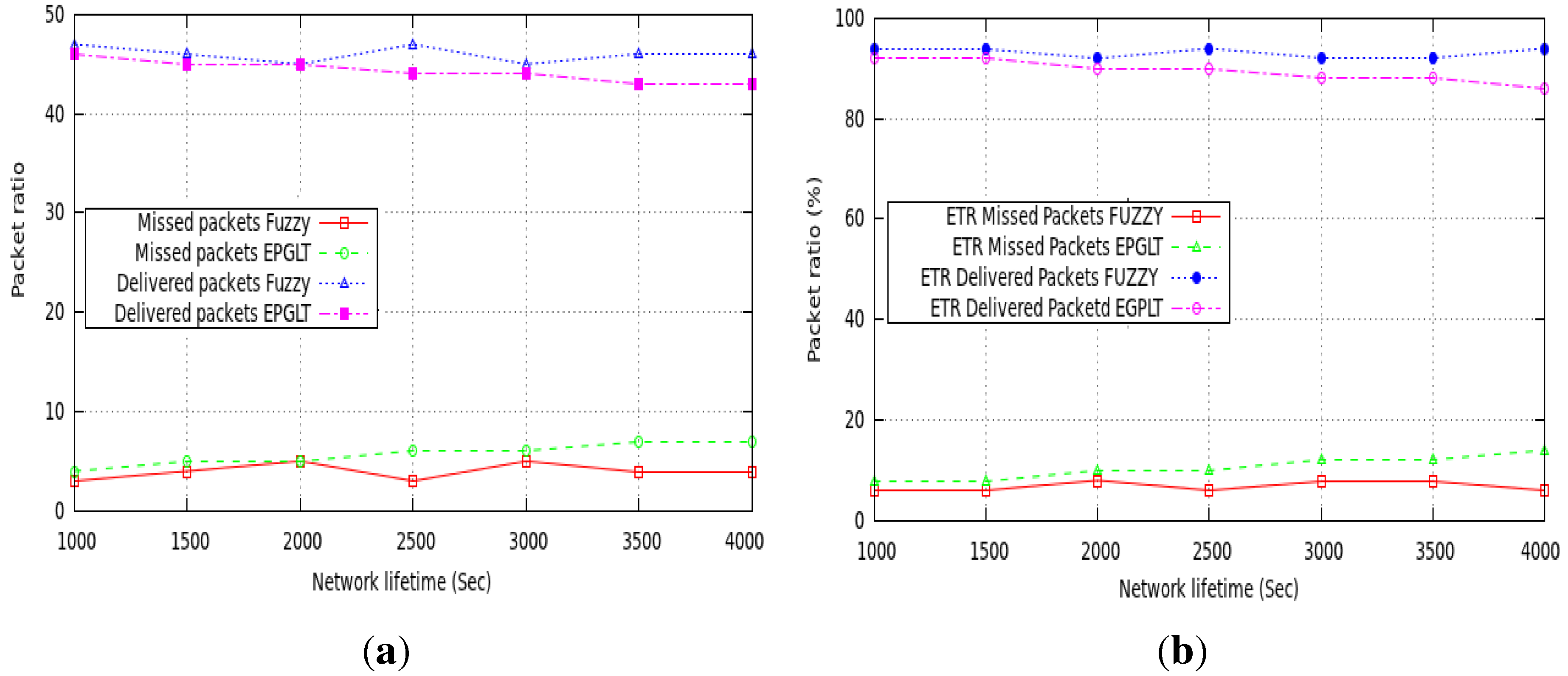
5.2. Real-Time Analysis
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ammari, H.M.; Das, S.K. Centralized and clustered k-coverage protocols for wireless sensor networks. IEEE Comput. 2012, 61, 118–133. [Google Scholar] [CrossRef]
- Yardibi, T.; Karasan, E. A distributed activity scheduling algorithm for wireless sensor network with partial coverage. Wirel. Netw. 2010, 16, 213–225. [Google Scholar]
- Gu, Y.; Ji, Y.; Zhao, B. Maximize lifetime of heterogeneous wireless sensor networks with joint coverage and connectivity requirement. In Proceedings of the Scalable Computing and Communications; Eighth International Conference on Scalable Computing and Communications Embedded Computing (SCALCOM’09), Dalian, China, 25–27 September 2009; pp. 226–231.
- Shah, B.; Kim, K. A new real-time and guaranteed lifetime protocol in wireless sensor networks. Int. J. Distrib. Sens. Netw. 2014, 2014, 11–22. [Google Scholar] [CrossRef]
- Shah, B.; Kim, K. A guaranteed lifetime protocol for real-time wireless sensor networks. In Proceedings of the 28th IEEE International Conference on Advanced Information Networking and Applications (AINA’14), Victoria, BC, Canada, 13–16 May 2014.
- Macedo, D.F.; Santos, A.L.; Nogueira, J.M.; Pujolle, G. Fuzzy-based load self-configuration in mobile P2P services. Comput. Netw. 2011, 55, 1834–1848. [Google Scholar] [CrossRef]
- Ortiz, A.M.; Royo, F.; Olivares, T.; Castillo, J.C.; Barbosa, L.O.; Marron, P.J. Fuzzy-logic based routing for dense wireless sensor networks. Telecommun. Syst. 2011. [Google Scholar] [CrossRef]
- Ortiz, A.M.; Olivares, T.; Castillo, J.C.; Barbosa, L.O.; Marron, P.J.; Royo, F. Intelligent role-based routing for dense wireless sensor networks. In Proceedings of the WMNC, Toulouse, France, 26–28 October 2011; pp. 1–6.
- Gupta, I.; Riordan, D.; Sampalli, S. Cluster-head election using fuzzy logic for wireless sensor networks. In Proceedings of the 3rd IEEE International Conference on Communication Networks and Services Research Conference, Helifax, NS, Canada, 16–18 May 2005.
- Kim, J.M.; Park, S.H.; Han, Y.J.; Chung, T.M. CHEF: Cluster head election mechanism using fuzzy logic in wireless sensor networks. In Proceedings of the 10th IEEE International Conference on Advanced Communication Technology, Gangwon-Do, Korea, 17–20 February 2008.
- Jiang, H.; Sun, Y.; Sun, R.; Xu, H. Fuzzy-logic based energy optimized routing for wireless sensor networks. Int. J. Distrib. Sens. Netw. 2013, 2013, 8–17. [Google Scholar] [CrossRef]
- Minhas, M.R.; Gopalakrishnan, S.; Leung, V.C.M. Fuzzy algorithms for maximum lifetime routing in wireless sensor networks. In Proceedings of the IEEE Global Telecommunications Conference GLOBCOM, New Orleans, LO, USA, 30 November–4 December 2008; pp. 1–6.
- Tripathy, M.R.; Gaur, K.; Sharma, S.; Virdi, G.S. Energy efficient fuzzy logic based intelligent wireless a sensor network. In Proceedings of the Electromagnetics Research Symposium, Cambridge, MA, USA, 5–8 July 2010; pp. 91–95.
- Bari, A.; Xu, Y.; Wu, X.; Jaekel, A. Design of sensor networks with guaranteed connectivity and lifetime. In Proceedings of the 3rd International Conference on Wireless Internet (WICON), Austin, TX, USA, 22–24 October 2007; pp. 1–8.
- Nam, Y.; Kwon, T.; Lee, H.; Jung, H.; Choi, Y. Guaranteeing the network lifetime in wireless sensor networks: A MAC layer approach. Comput. Commun. 2007, 30, 32–45. [Google Scholar] [CrossRef]
- Lin, C.H.; King, C.T.; Chen, T.Y. Constrained multiple deployment problem in wireless sensor networks with guaranteed lifetimes lifetimes. Wirel. Netw. 2011, 17, 385–396. [Google Scholar] [CrossRef]
- Tu, L.; Hong, H.; Zhou, G. Minimum cost routing with a lifetime guarantee in wireless sensor networks. In Proceedings of the IEEE/ACM International Conference on Green Computing and Communications & International Conference on Cyber, Physical and Social Computing (GreenCom/CPSCom), Hangzhou, China, 18–20 December 2010; pp. 774–779.
- Park, J.K.; Hong, S.J.; Kim, K.H.; Kang, T.H.; Lee, W.Y. A lifetime-guaranteed routing scheme in wireless sensor networks. World Acad. Sci. Eng. Technol. 2010, 65, 946–994. [Google Scholar]
- Bulut, E.; Korpeoglu, I. Sleep scheduling with expected common coverage in wireless sensor networks. Wirel. Netw. 2011, 17, 19–40. [Google Scholar] [CrossRef]
- Hea, T.; Stankovica, J.; Lub, C.; Abdelzahera, T. SPEED: A stateless protocol for real-time communication in sensor networks. In Proceedings of the 23rd International Conference on Distributed Computing Systems, Providence, RI, USA, 29 May 2003; pp. 46–55.
- Felemban, E.; Lee, C.; Ekici, E. MMSPEED: Multipath Multi- SPEED protocol for QoS guarantee of reliability and Timeliness in wireless sensor networks. IEEE Trans. Mob. Comput. 2006, 5, 738–754. [Google Scholar] [CrossRef]
- Jalilolghadr, S.M.; Sabaei, M. Proposed a new algorithm for real-time applications in routing of wireless sensor networks. In Proceedings of the International Conference on Management and Artificial Intelligence, Bali, Indonesia, 1–3 April 2011; pp. 17–22.
- Heikalabad, S.R.; Rasouli, H.; Nematy, F.; Rahman, N. QEMPAR: Qos and energy aware multi-path routing algorithm for the real-time applications in wireless sensor networks. Int. J. Comput. Sci. 2011, 8, 466–471. [Google Scholar]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Jang, J.S.R.; Sun, C.T.S. Neuro-Fuzzy and Soft Computing: A Computational Approach to Learning and Machine Intelligence; Prentice-Hall: New York, NY, USA, 1996. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shah, B.; Iqbal, F.; Abbas, A.; Kim, K.-I. Fuzzy Logic-Based Guaranteed Lifetime Protocol for Real-Time Wireless Sensor Networks. Sensors 2015, 15, 20373-20391. https://doi.org/10.3390/s150820373
Shah B, Iqbal F, Abbas A, Kim K-I. Fuzzy Logic-Based Guaranteed Lifetime Protocol for Real-Time Wireless Sensor Networks. Sensors. 2015; 15(8):20373-20391. https://doi.org/10.3390/s150820373
Chicago/Turabian StyleShah, Babar, Farkhund Iqbal, Ali Abbas, and Ki-Il Kim. 2015. "Fuzzy Logic-Based Guaranteed Lifetime Protocol for Real-Time Wireless Sensor Networks" Sensors 15, no. 8: 20373-20391. https://doi.org/10.3390/s150820373
APA StyleShah, B., Iqbal, F., Abbas, A., & Kim, K.-I. (2015). Fuzzy Logic-Based Guaranteed Lifetime Protocol for Real-Time Wireless Sensor Networks. Sensors, 15(8), 20373-20391. https://doi.org/10.3390/s150820373