Precise Correlation of Contact Area and Forces in the Unstable Friction between a Rough Fluoroelastomer Surface and Borosilicate Glass

 , ,
, ,  , and
, and
Abstract
1. Introduction
2. Materials and Methods
2.1. Materials
2.2. Experimental Procedures
2.3. Microscopy In Situ Microtribometry
2.4. Image Analysis
3. Results & Discussion
3.1. Creep Test
3.2. Stick-Slip Friction
3.2.1. General Description of Stick-Slip Behavior
3.2.2. Comparison of Stick-Slip Behavior of Different Tests
3.2.3. Normal Force Response Corresponding to Stick-Slip
3.3. Real Contact Area Results
3.3.1. Stick Region in the Contact Area
3.3.2. Machine Learning Algorithm for Contact Area Partitioning
3.3.3. Correlation of Friction and Real Contact Area
4. Conclusions
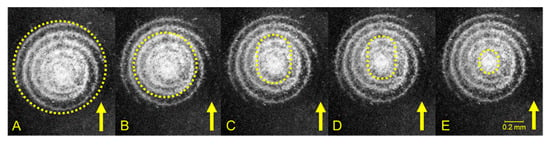
- The contact area decreased during the stick phase and increased abruptly with the slip movement of the specimen. The transformation from static friction to dynamic friction took about 30 milliseconds.
- During each macro stick phase, the contact area increased and then decreased with an asymmetric parabolic shape.
- The shear strength profile was related to loads and speeds using machine learning, which resulted in the discovery of the movement of the pinned region within one stick phase.
- Two mathematical models of time-resolved friction force and shear stress were introduced and offered an understanding of the phenomena which were observed with a microscope and analyzed from the videos.
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Technavio. Global Machined Seals Market 2017–2021. Available online: https://www.technavio.com/report/global-machined-seals-market (accessed on 14 October 2020).
- Alan, H. Reduce Vibration and Avoid Stiction in Seals. Available online: https://www.hydraulicspneumatics.com/hydraulic-fluids/reduce-vibration-and-avoid-stiction-seals (accessed on 20 January 2019).
- Gresham, R.M. Slip-stick: What’s it all about? Tribol. Lubr. Technol. 2011, 32–33. [Google Scholar]
- Ludema, K.C.; Tabor, D. The friction and visco-elastic properties of polymeric solids. Wear 1966, 9, 329–348. [Google Scholar] [CrossRef]
- Schallamach, A. How does rubber slide? Wear 1971, 17, 301–312. [Google Scholar] [CrossRef]
- Bartenev, G.M.; Lavrentjev, V.V.; Konstantinova, N.A. The actual contact area and friction properties of elastomers under frictional contact with solid surfaces. Wear 1971, 18, 439–448. [Google Scholar] [CrossRef]
- Barquins, M. Sliding friction of rubber and Schallamach waves—A review. Mater. Sci. Eng. 1985, 73, 45–63. [Google Scholar] [CrossRef]
- Arnolds, S.P.; Roberts, A.D.; Taylor, A.D. Rubber friction dependence on roughness and surface energy. J. Nat. Rubber Res. 1987, 2, 1–14. [Google Scholar]
- Roberts, A.D. A Guide to Estimating the Friction of Rubber. Rubber Chem. Technol. 1992, 65, 673–686. [Google Scholar] [CrossRef]
- Maegawa, S.; Nakano, K. Mechanism of stick-slip associated with Schallamach waves. Wear 2010, 268, 924–930. [Google Scholar] [CrossRef]
- Robbins, M.O.; Thompson, P.A. Critical velocity of stick-slip motion. Science 1991, 253, 916. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Yoshizawa, H.; McGuiggan, P.; Israelachvili, J. Identification of a second dynamic state during stick-slip motion. Science 1993, 259, 1305–1308. [Google Scholar] [CrossRef]
- Berman, A.D.; Ducker, W.A.; Israelachvili, J.N. Origin and characterization of different stick−slip friction mechanisms. Langmuir 1996, 12, 4559–4563. [Google Scholar] [CrossRef]
- Dahmen, K.; Sethna, J.P. Hysteresis, avalanches, and disorder-induced critical scaling: A renormalization-group approach. Phys. Rev. B 1996, 53, 14872–14905. [Google Scholar] [CrossRef]
- Ovcharenko, A.; Halperin, G.; Etsion, I. In situ and real-time optical investigation of junction growth in spherical elastic–plastic contact. Wear 2008, 264, 1043–1050. [Google Scholar] [CrossRef]
- Chromik, R.R.; Strauss, H.W.; Scharf, T.W. Materials phenomena revealed by in situ tribometry. JOM 2012, 64, 35–43. [Google Scholar] [CrossRef]
- Kim, J.; Dunn, A.C. Soft hydrated sliding interfaces as complex fluids. Soft Matter 2016, 12, 6536–6546. [Google Scholar] [CrossRef]
- Grün, F.; Sailer, W.; Gódor, I. Visualization of the processes taking place in the contact zone with in-situ tribometry. Tribol. Int. 2012, 48, 44–53. [Google Scholar] [CrossRef]
- Yamaguchi, T.; Sawae, Y.; Rubinstein, S.M. Effects of loading angles on stick–slip dynamics of soft sliders. Extrem. Mech. Lett. 2016, 9, 331–335. [Google Scholar] [CrossRef]
- Eguchi, M.; Shibamiya, T.; Yamamoto, T. Measurement of real contact area and analysis of stick/slip region. Tribol. Int. 2009, 42, 1781–1791. [Google Scholar] [CrossRef]
- Schulze, K.D.; Bennett, A.I.; Marshall, S.; Rowe, K.G.; Dunn, A.C. Real area of contact in a soft transparent interface by particle exclusion microscopy. J. Tribol. 2016, 138, 41404. [Google Scholar] [CrossRef]
- Krick, B.A.; Vail, J.R.; Persson, B.N.J.; Sawyer, W.G. Optical in situ micro tribometer for analysis of real contact area for contact mechanics, adhesion, and sliding experiments. Tribol. Lett. 2012, 45, 185–194. [Google Scholar] [CrossRef]
- Reale, E.R.; Dunn, A.C. Poroelasticity-driven lubrication in hydrogel interfaces. Soft Matter 2017, 13, 428–435. [Google Scholar] [CrossRef] [PubMed]
- Johnson, C.L.; Dunn, A.C. Wear mode control of polydimethylsiloxane (PDMS) by load and composition. Wear 2019, 438–439, 203066. [Google Scholar] [CrossRef]
- Bonyadi, S.Z.; Dunn, A.C. Brittle or Ductile? Abrasive wear of polyacrylamide hydrogels reveals load-dependent wear mechanisms. Tribol. Lett. 2020, 68, 2859. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man. Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Sills, S.; Vorvolakos, K.; Chaudhury, M.K.; Overney, R.M. Molecular origins of elastomeric friction. In Fundamentals of Friction and Wear; Gnecco, E., Meyer, E., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 659–676. ISBN 978-3-540-36806-9. [Google Scholar]
- Liu, J.; Jiang, H.; Cheng, Q.; Wang, C. Investigation of nano-scale scratch and stick-slip behaviors of polycarbonate using atomic force microscopy. Tribol. Int. 2018, 125, 59–65. [Google Scholar] [CrossRef]
- Jiang, H.; Browning, R.; Sue, H.-J. Understanding of scratch-induced damage mechanisms in polymers. Polymer 2009, 50, 4056–4065. [Google Scholar] [CrossRef]
- Jiang, H.; Cheng, Q.; Jiang, C.; Zhang, J.; Yonghua, L. Effect of stick-slip on the scratch performance of polypropylene. Tribol. Int. 2015, 91, 1–5. [Google Scholar] [CrossRef]
- Degrange, J.-M.; Thomine, M.; Kapsa, P.; Pelletier, J.M.; Chazeau, L.; Vigier, G.; Dudragne, G.; Guerbé, L. Influence of viscoelasticity on the tribological behaviour of carbon black filled nitrile rubber (NBR) for lip seal application. Wear 2005, 259, 684–692. [Google Scholar] [CrossRef]
- Çolak, A.; Wormeester, H.; Zandvliet, H.J.W.; Poelsema, B. The influence of instrumental parameters on the adhesion force in a flat-on-flat contact geometry. Appl. Surf. Sci. 2014, 308, 106–112. [Google Scholar] [CrossRef]
- Cai, S.; Bhushan, B. Meniscus and viscous forces during separation of hydrophilic and hydrophobic surfaces with liquid-mediated contacts. Mater. Sci. Eng. R Rep. 2008, 61, 78–106. [Google Scholar] [CrossRef]
- Persson, B.N.J.; Volokitin, A.I. Rubber friction on smooth surfaces. Eur. Phys. J. E Soft Matter 2006, 21, 69–80. [Google Scholar] [CrossRef] [PubMed]
- Fukahori, Y.; Gabriel, P.; Busfield, J.J.C. How does rubber truly slide between Schallamach waves and stick–slip motion? Wear 2010, 269, 854–866. [Google Scholar] [CrossRef]
- Matsuda, K.; Hashimoto, D.; Nakamura, K. Real contact area and friction property of rubber with two-dimensional regular wavy surface. Tribol. Int. 2016, 93, 523–529. [Google Scholar] [CrossRef]
- Tabor, D. Friction—The present state of our understanding. J. Tribol. 1981, 103, 169. [Google Scholar] [CrossRef]
- Maegawa, S.; Itoigawa, F.; Nakamura, T. Dynamics in sliding friction of soft adhesive elastomer: Schallamach waves as a stress-relaxation mechanism. Tribol. Int. 2016, 96, 23–30. [Google Scholar] [CrossRef]
- Bowden, F.P.; Tabor, D. The Friction and Lubrication of Solids; Clarendon Press: Oxford, UK; Oxford University Press: New York, NY, USA, 2001; ISBN 0198507771. [Google Scholar]
- Maegawa, S.; Nakano, K. Dynamic behaviors of contact surfaces in the sliding friction of a soft material. JAMDSM 2007, 1, 553–561. [Google Scholar] [CrossRef]
- Deladi, E.L.; de Rooij, M.B.; Schipper, D.J. Modelling of static friction in rubber–metal contact. Tribol. Int. 2007, 40, 588–594. [Google Scholar] [CrossRef]
- Rubinstein, S.M.; Cohen, G.; Fineberg, J. Visualizing stick–slip: Experimental observations of processes governing the nucleation of frictional sliding. J. Phys. D: Appl. Phys. 2009, 42, 214016. [Google Scholar] [CrossRef]
- Davis, C.S.; Martina, D.; Creton, C.; Lindner, A.; Crosby, A.J. Enhanced adhesion of elastic materials to small-scale wrinkles. Langmuir 2012, 28, 14899–14908. [Google Scholar] [CrossRef]
- Bennewitz, R.; David, J.; Lannoy, C.-F.; de Drevniok, B.; Hubbard-Davis, P.; Miura, T.; Trichtchenko, O. Dynamic strain measurements in a sliding microstructured contact. J. Phys. Condens. Matter 2008, 20, 15004. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test | Speed [µm/s] | Normal Load [mN] | Length per Trace [µm] | Number of Cycles [-] |
|---|---|---|---|---|
| 1 | 100 | 500 | 500 | 200 |
| 2 | 20 | 500 | 500 | 20 |
| 3 | 5 | 500 | 500 | 30 |
| 4 | 1 | 500 | 500 | 7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Bonyadi, S.Z.; Grün, F.; Pinter, G.; Hausberger, A.; Dunn, A.C. Precise Correlation of Contact Area and Forces in the Unstable Friction between a Rough Fluoroelastomer Surface and Borosilicate Glass. Materials 2020, 13, 4615. https://doi.org/10.3390/ma13204615
Wang C, Bonyadi SZ, Grün F, Pinter G, Hausberger A, Dunn AC. Precise Correlation of Contact Area and Forces in the Unstable Friction between a Rough Fluoroelastomer Surface and Borosilicate Glass. Materials. 2020; 13(20):4615. https://doi.org/10.3390/ma13204615
Chicago/Turabian StyleWang, Chao, Shabnam Z. Bonyadi, Florian Grün, Gerald Pinter, Andreas Hausberger, and Alison C. Dunn. 2020. "Precise Correlation of Contact Area and Forces in the Unstable Friction between a Rough Fluoroelastomer Surface and Borosilicate Glass" Materials 13, no. 20: 4615. https://doi.org/10.3390/ma13204615
APA StyleWang, C., Bonyadi, S. Z., Grün, F., Pinter, G., Hausberger, A., & Dunn, A. C. (2020). Precise Correlation of Contact Area and Forces in the Unstable Friction between a Rough Fluoroelastomer Surface and Borosilicate Glass. Materials, 13(20), 4615. https://doi.org/10.3390/ma13204615