1. Introduction
Conventional power systems use synchronous generators as their main power source, the swing characteristics of which suppress the power system swing owing to the load power and generated power fluctuations [
1]. However, due to recent advancements in distributed power sources, such as renewable energy, a large number of grid-connected inverters are being connected to power systems. The inertial power of the entire system, which generally suppresses the fluctuations of the power system, is insufficient when the capacity of the grid-connected inverters exceeds the capacity of the main power supply, making it challenging to maintain stability [
2,
3]. There is thus a need for the grid-connected inverters of distributed power sources to have power generation functionality and to suppress the fluctuations of the power system [
4]. Obviously, it is necessary to address other existing technical issues such as the intermittentness of solar energy [
5], limitations on the data capacity of smart grids [
6], the influence of power electronics equipment on power quality [
7], and the effectiveness of energy trading; various studies have investigated these issues [
8]. Although the problem of the capacity of grid-connected inverters exceeding that of the main power supply was previously regarded as being characteristic of microgrids (MGs), a similar problem has recently been identified in large-scale smart grids. Field research using actual data is therefore being actively conducted (in Korea [
9], Canada [
10], Oahu, HI [
11,
12,
13], and the USA in general [
14]). To leverage open-source system validation platforms (SVPs) for interoperable test procedures, research using power/controller hardware-in-the-loop (PHIL/CHIL) is also being actively promoted [
15,
16,
17,
18]; Ref. [
19] summarizes these trends.
So-called “smart inverters” for photovoltaic power generation in detached houses have a functionality that can contribute to maintaining the balance between electricity supply and demand at steady state [
20,
21]. Some smart inverters realize grid-support functions (GSFs) based on power control according to the communication of commands at a higher level of integrated control, in which case it is relatively easy to estimate the effects and formulate the required specifications. In contrast, some inverters autonomously calculate the power imbalance of the system without higher-level control commands, in a manner similar to that of synchronous generators, immediately after fluctuations in the load/generated power. In this way, high-performance grid-connected inverters can control their own inputs and outputs using high responsiveness, which has been attracting increased attention. The autonomous functions are generally installed in the primary control unit of the inverter, and the details are rarely disclosed by manufacturers. It is therefore difficult to estimate their effects and formulate the required specifications [
22]. A protocol study was conducted to comprehensively test the capability of smart inverters to stabilize MGs [
23,
24]. Reference [
24] examines various testing methods using three commercially available, single-phase, residential-scale photovoltaic (PV) inverters from three different manufacturers. In [
23], a test protocol for smart inverters that can utilize battery energy storage systems is studied, and a summary is provided of issues related to four interoperability function tests defined in IEC TR 61850-90-7: the specified active power test (INV4), the var-priority volt-var test (VV), the specified power factor test (INV3), and frequency-watt control (FW) from storage.
Research on optimizing parameter settings to improve the performance of distribution systems by making smart inverters compatible with volt-var and volt-watt functions is in progress [
9,
14,
25,
26,
27,
28,
29]. It has been proposed that if the volt-watt function is prioritized over the volt-var function, the system voltage will vibrate continuously [
27]. Conversely, when suppressing the volt-watt function, fairness is required to reduce the amount of power generated by distributed power sources (PVs, etc.) [
29]. To establish a method for handling these problems, the simulation analysis of an actual field is required: an analysis using actual data in an actual feeder [
9,
14], quasi-static time series simulation using an open distribution system simulator (OpenDSS) [
9], and HIL simulation [
29] have been reported thus far. Moreover, in [
26], the effects of improved volt-var control using the particle swarm optimization (PSO) algorithm on line loss and operation cost reduction are demonstrated, and in [
25,
28], the optimum utilization of PV inverter capacity is described.
Some smart inverters obtain the same characteristics by simultaneously mimicking the swing and excitation characteristics of a synchronous generator [
30,
31,
32,
33], while others obtain similar characteristics without focusing on the excitation characteristics [
34,
35]. Unfortunately, there is little research on volt-var, volt-watt, and frequency-watt control that focuses on transient responses related to the swing characteristics of synchronous generators. Although the GSFs of frequency-watt controls between grid-forming and grid-following PV inverters are discussed in [
12], the transient response, which corresponds to the inertial response, has not been discussed. However, research on improving transient responses with inverters is ongoing [
35,
36,
37,
38,
39,
40]. References [
38,
39,
40] propose an improved GSF by using the direct current (DC) energy buffer of a grid-connected inverter. In [
40], a new distributed consensus-based control that reduces the circulating power between parallel running inverters is demonstrated. In [
39], experimental results that achieve an inertial response by connecting only a small capacitor to the DC link part are presented. Reference [
37] presents the experimental results for a decentralized control that controls multiple PV inverters as master/slave without using a storage battery. In [
38], a control that achieves both a droop response and an inertial response using a hybrid energy storage system (ESS) and that reduces the deterioration of the battery storage by using a super capacitor is proposed. A method that strictly simulates the swing characteristics of a synchronous generator using battery power is called virtual synchronous generator (VSG) control, and many studies have been conducted to improve this method [
30,
31]. For example, reference [
35] presents the prediction model of a VSG to enhance suppression performance of the voltage and frequency variations. In [
36], a method for adding a phase adjustment function to multi-loop VSG control was introduced, and it was reported that renewable energy-based inverters were used in a plug-and-play manner to reduce the harmonics and oscillation and to improve the dynamic response and power quality.
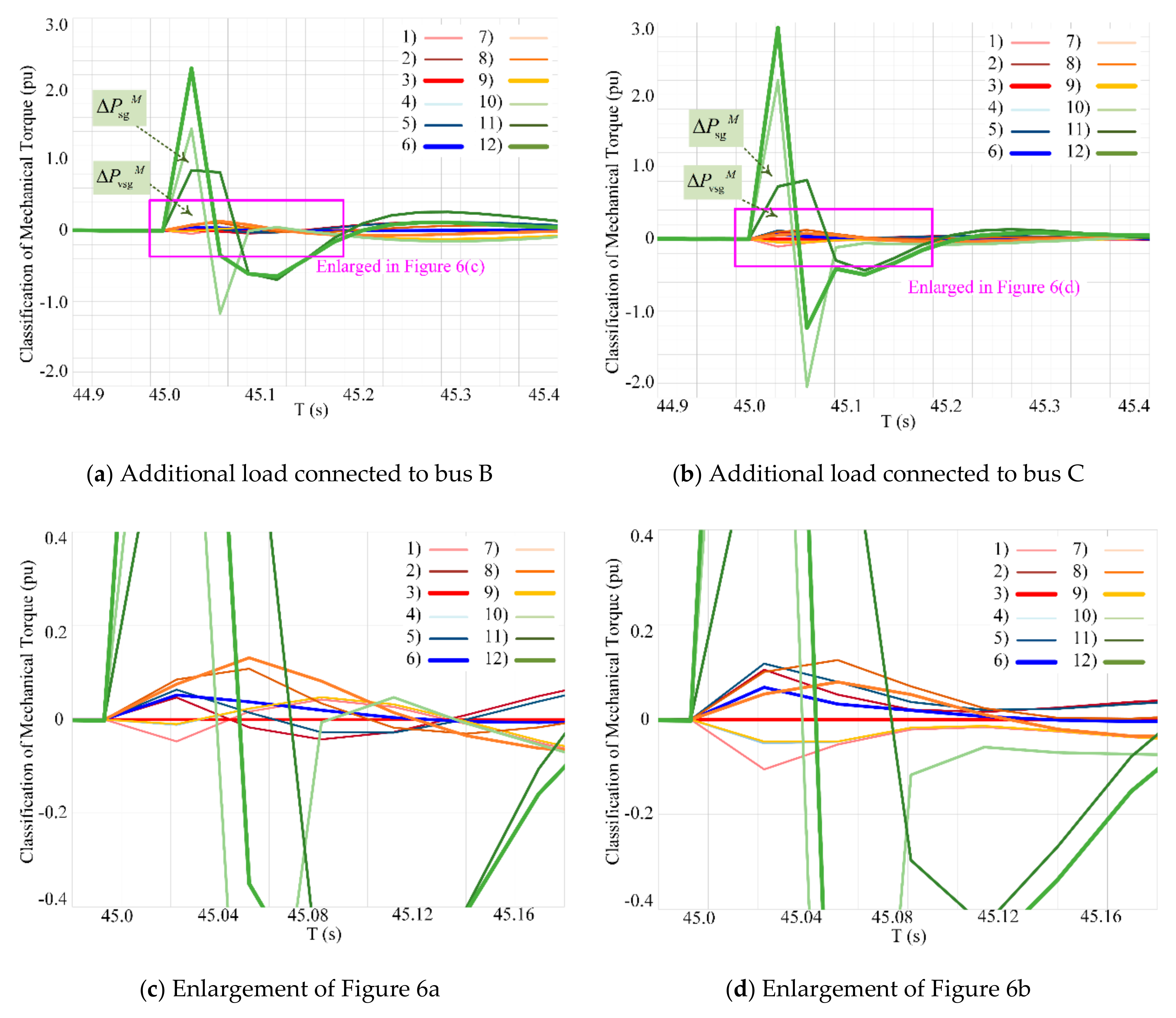
The swing characteristics of the synchronous generator to be mimicked in this study are determined to be the characteristics of the rotor, expressed by both the inertial and damping responses. The response attributed to the synchronization force is added when multiple synchronous machines are interconnected [
41]. After some time, the control of the governor becomes effective, and a governor-free response is added to the inertial and damping responses [
42]. The deviation of the system frequency represents the difference between the electrical angular velocity and rated angular velocity of the rotor reference, which is equal to the deviation of the internal phase difference angle (angular velocity). That is, to accurately analyze the transient fluctuation of the system frequency, it is essential to evaluate the inertial effect, damping effect, synchronization effect, governor effect, etc. separately from the swing equation of the generator rotor angle (mechanical angle). Nevertheless, few studies have analyzed the system frequency by separating and analyzing the components of the swing equation of the generator rotor in detail. Therefore, in this study, the swing characteristics of the generator mimicked by the grid-connected inverter are accurately separated by effect, and the correlation between each effect and the values of the control parameters is clarified. The mechanical torque of each power supply, which is calculated mathematically, is decomposed into inertia, damping, synchronization torque, and governor effect, and the decomposition components were analyzed and indexed from both time and frequency domains. This provides an indicator of the parameter settings required for grid-connected inverters not only in MGs but also large smart grids. To acquire the time-series data that is used to decompose the above-mentioned mechanical torque, the Institution of Electrical and Electronic Engineers (IEEE) 9 bus model is adopted, and two distributed power sources are connected to the existing power system through a grid-connected inverter. Although simulation results are to be verified separately, it should be noted that it is not theoretically necessary to be limited to IEEE 9 bus from the viewpoint of reducing multiple machines to a two-machine model. The transient characteristics are analyzed using numerical simulation results from MATLAB/Simulink according to a mathematical model, and the correlation between each control parameter and each response is clarified based on the concept of the center of inertial frequency. In this system, a synchronous generator is the main power source. The two inverters are reduced to one, and each is equipped with the same VSG control. The total capacities of the grid-connected inverters are assumed to be almost the same as that of the main power supply, thereby making it difficult to maintain system stability. That is, the multi-machine large-scale system was reduced to a two-machine model. This not only reduces the mathematical analysis associated with a multi-machine model but also allows analysis that can be focused on various parameter ratios between the conventional main power supply and other distributed power sources.
The structure of this study is as follows:
Section 2 reviews the interconnection principle of multiple synchronous machines, and
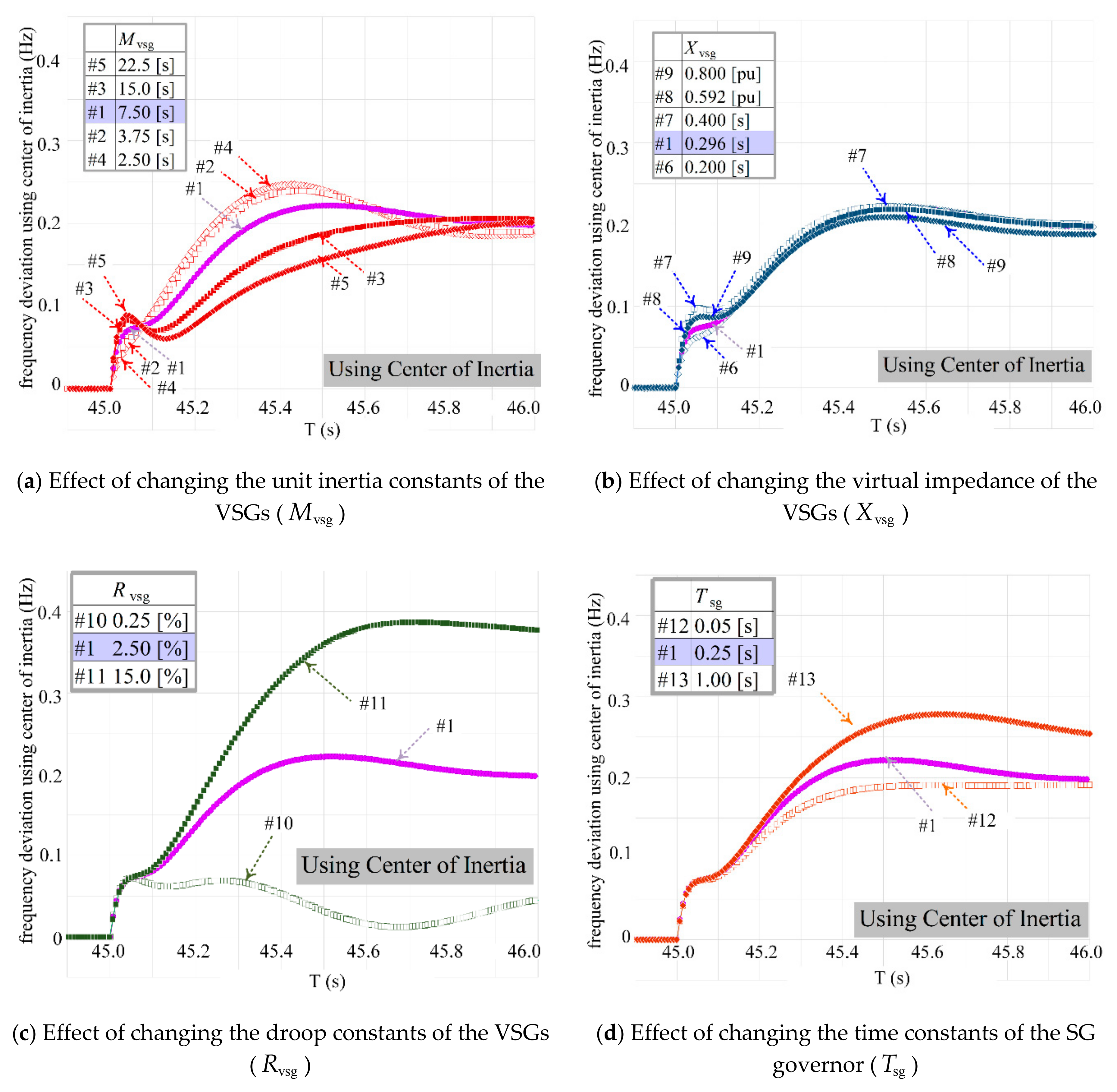
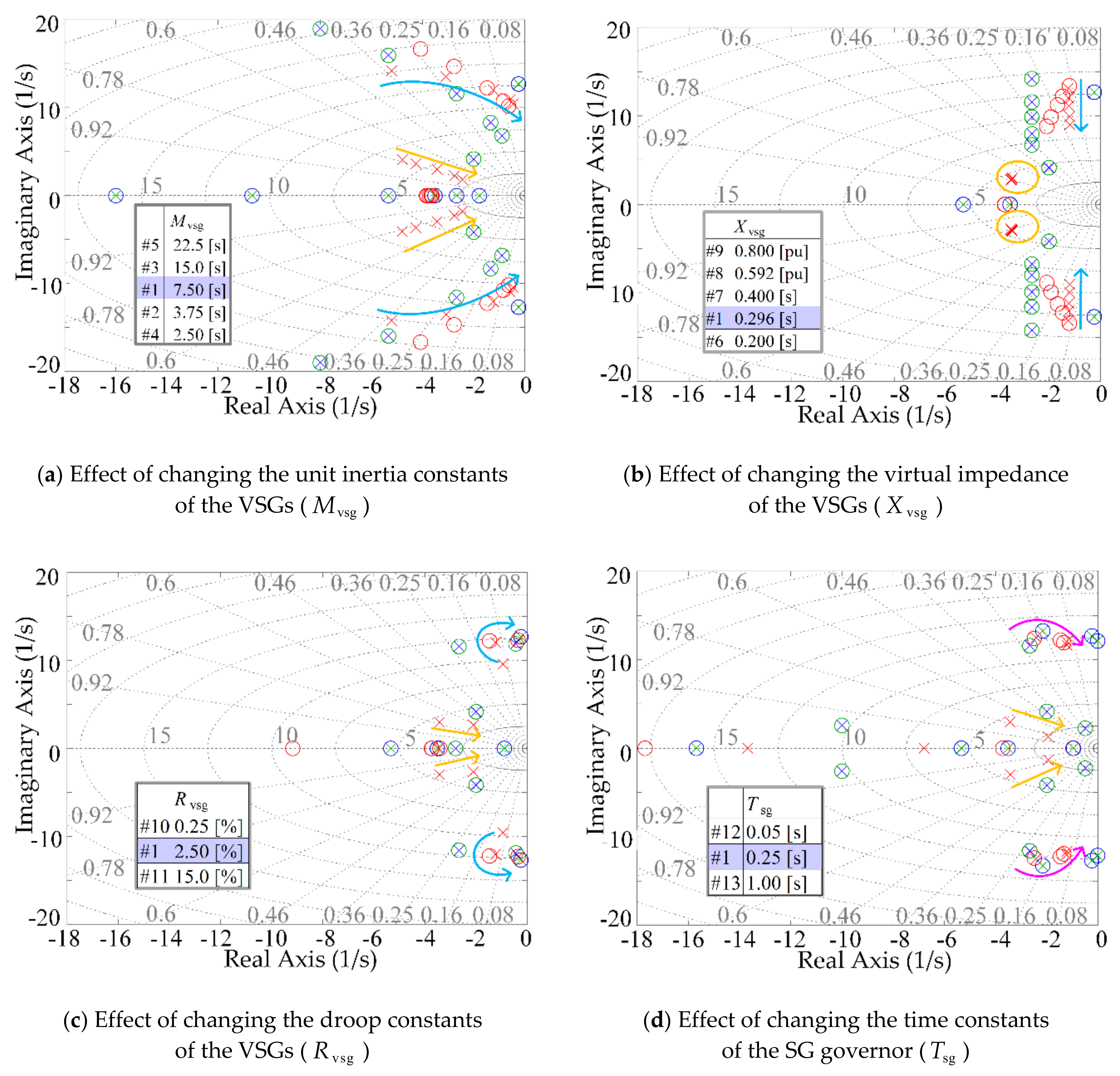
Section 3 analyzes the transient response characteristics from simulation test results in response to changes in each parameter of the VSG control inverter. The frequency of the center of inertia is also calculated in
Section 3, while
Section 4 discusses indicators for the VSG inverter based on the outcomes of the torque response and the center of inertia in both the time and frequency domains.
Section 5 summarizes this study.
2. Theory of Multiple Synchronous Machine Interconnections
2.1. Synchronous Generator Model
Figure 1 is based on the swing equation for a synchronous generator (SG) (Equation (1)) [
41]:
where
s is the Laplacian differential operator,
[pu] is the machine input torque,
[rad] is the phase difference angle, and
[rad/s] is the rated angular velocity. Because these are all considered on the basis of 1 pu,
can be thought of as the fluctuation of the input/output power.
[s] is the unit inertia constant,
[pu/pu] is the dumping coefficient, and
[pu/pu] and
[s] are the droop and time constants related to the active power and system frequency of the governor, respectively.
[pu/rad] is the synchronization coefficient. The transfer function of the governor in the SG is set to be
, and the transfer function from the input/output power fluctuation
to the frequency deviation (slip)
[pu] in a stand-alone SG was set to
.
In the case of a conventional SG, the governor time constant [s] is several hundreds of milliseconds, and its effect appears after the delay from the onset of the fluctuation in the input/output power. The synchronization torque term is relevant when the SG is connected to another synchronous machine, and the synchronization coefficient [pu/rad] is determined by the interconnection style (bus model). Therefore, assuming that the governor response is not on time, the transfer function in a stand-alone SG immediately after the onset of input/output power fluctuations is only determined by the inertial torque term and the dumping torque term .
The synchronous machine block, a device in the standard library of Simscape Electrical in the MATLAB/Simulink environment, is used for the governor model , for which Equation (1) holds. A model of a general excitation system is also included, but details are omitted here because the swing equation is the focus of this study.
2.2. Virtual Synchronous Generator Control Model
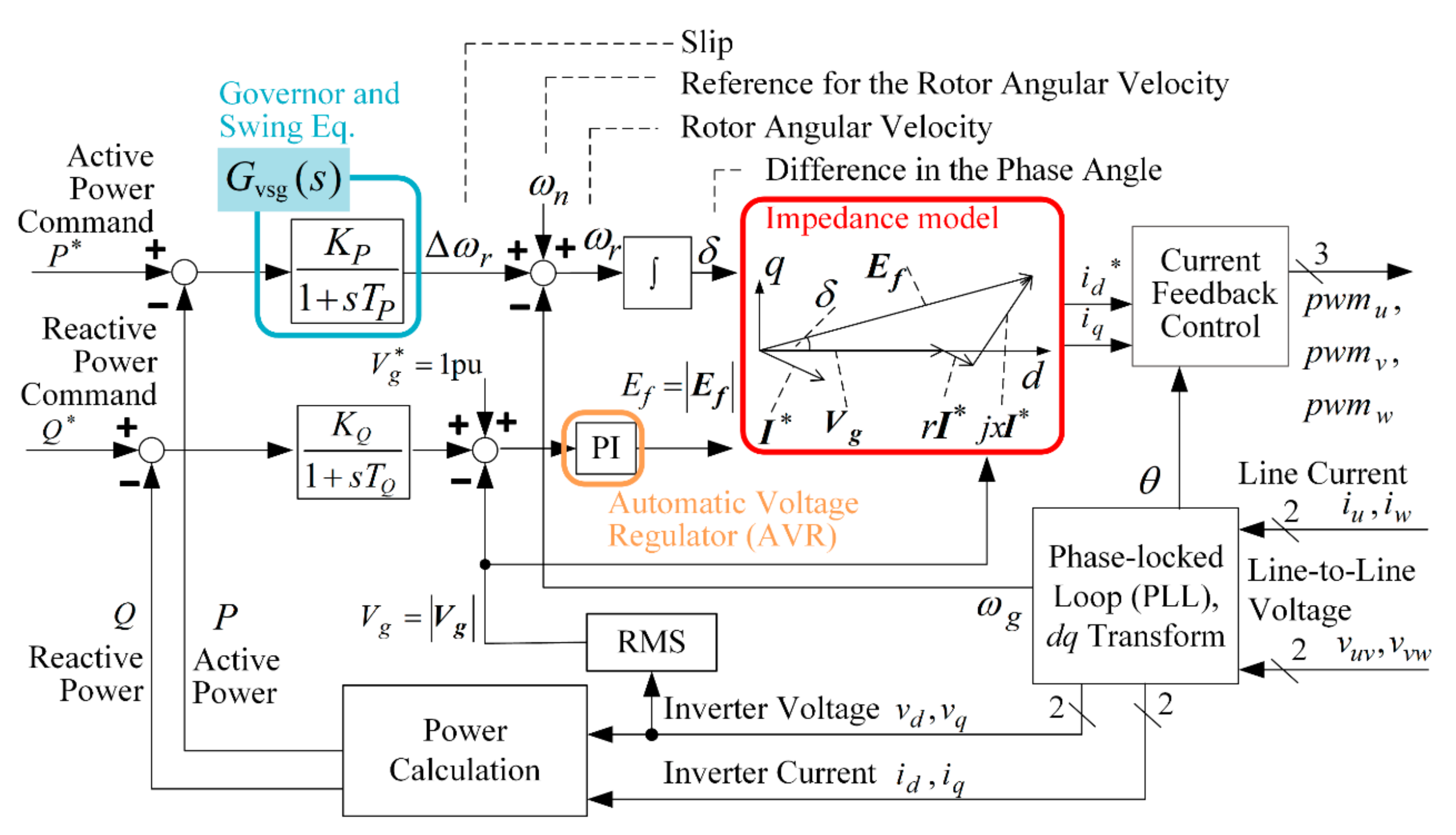
Figure 2 shows a block diagram of a VSG control installed in a grid-connected inverter control. A Kawasaki VSG [
30,
31] is used in this study. The transfer function
enclosed by the light-blue frame in
Figure 2 corresponds to
in
Figure 1. Because the time required for the fuel injection and delay in the electrical system do not need to be considered in the governor simulated according to VSG control, the governor time constant
[s] in
Figure 1 is 0 s, and
expresses the combination of the governor model with a delay time of zero and the inertial torque term.
[pu/pu] is the droop related to the active power
[pu] and angular frequency
[pu] of the terminal voltage estimated from the phase-locked loop (PLL).
[s] is the unit inertia constant of the VSG,
[s] is the time constant needed for inertial simulations, and the angular frequency deviation (slip)
[pu] and internal phase difference
[rad] can be calculated in the same way as for the SG.
The magnitude of the generator (induced) voltage vector [pu] is determined from the relationship between the reactive power and terminal voltage. [pu/pu] is the droop associated with the reactive power [pu], and the magnitude of the terminal (inverter) voltage vector is [pu]. [s] is the filter time constant, and the conventional proportional-integral (PI) compensator is used as the AVR.
The vector diagram enclosed in the red frame in
Figure 2 is the impedance model, which illustrates the relationship between the generator voltage vector
, terminal voltage vector
, command value vector
of the inverter current, and impedance
,
[pu]. The impedance
,
[pu] is a pseudo-impedance set in the VSG control software, and it becomes dominant over the alternating current (AC) output filter impedance in low-frequency regions, such as commercial frequencies. The ratio of the virtual inductance
and virtual resistance
is empirically set to
. The current command vector value
is expressed by Equation (2) [
30,
31], as a vector of the dq coordinates:
2.3. System Model
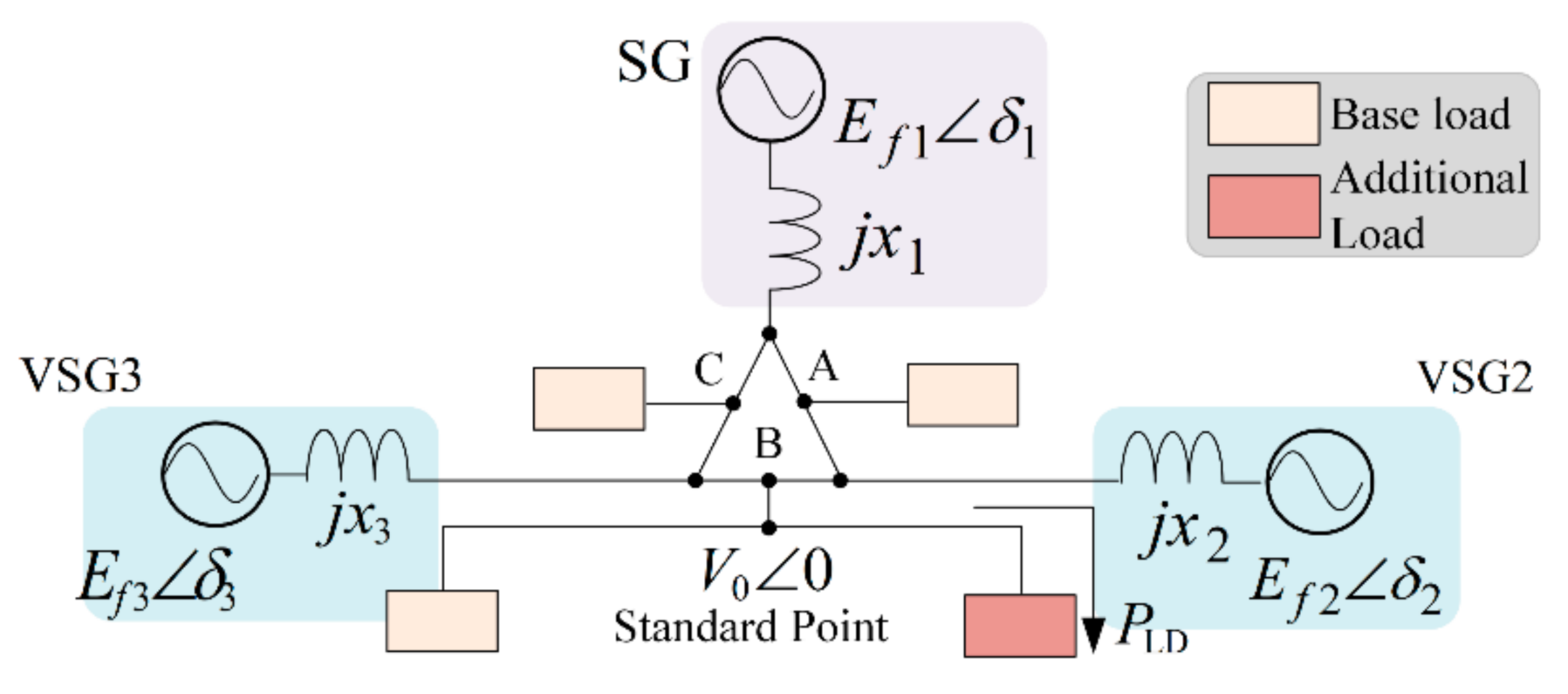
In this study, N synchronous machines are connected in a system: one primary power supply is assumed to be an SG, and (N = 1) generators are assumed to be distributed power sources. The IEEE 9 bus model (N = 3 machine systems) is adopted, and two inverters equipped with the same VSG control are connected. The two VSG inverters are contracted, and a test in which the total capacity, inertia, reactance, and other variables are converted based on the combination of the two inverters being approximately equal to the SG is used as the standard test. In other tests, the VSG control parameter was increased or decreased for comparative purposes. In this study, we do not focus on the DC side of the inverter: we assume a constant DC power supply, and the capacity of DC side is not limited.
Figure 3 shows a connection diagram for the system. The base loads are evenly connected to the three buses A, B, and C between pairs of power supplies. For the purpose of running the simulation smoothly, the total base-load capacity is supplied from the SG, and an additional load is stepped onto bus B between the two VSG inverters after the power supply for the base loads has settled. The frequency deviation for the base load is compensated by the SG torque command value, and the phase difference angle after settling is subtracted as an initial offset value. The voltage deviation is considered to be small, and the terminal voltage of each power supply where the additional load is connected is assumed to be equal to the standard voltage at
.
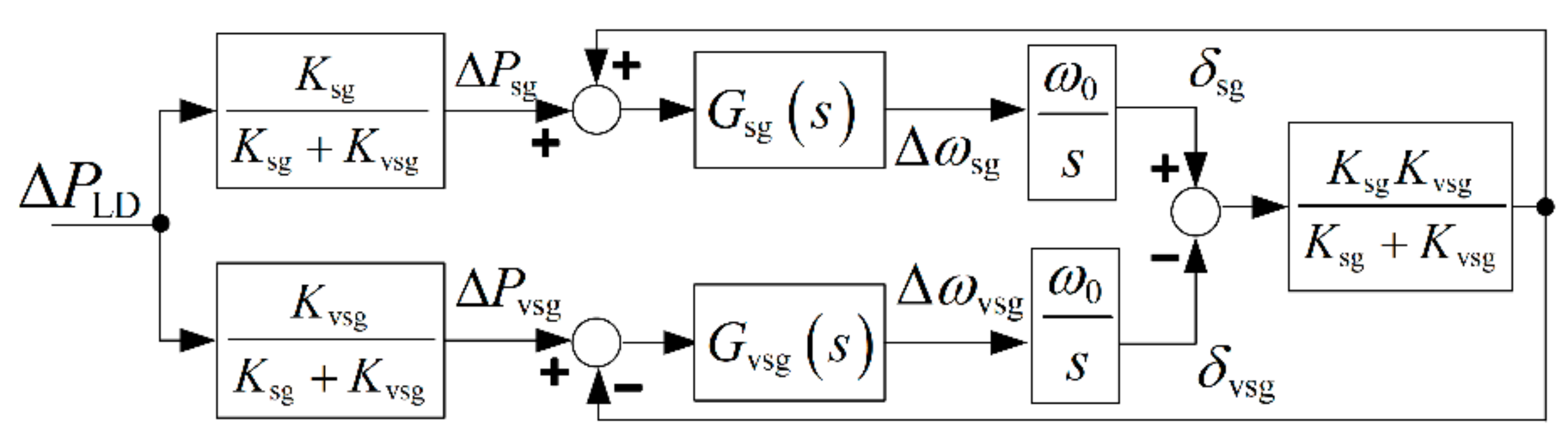
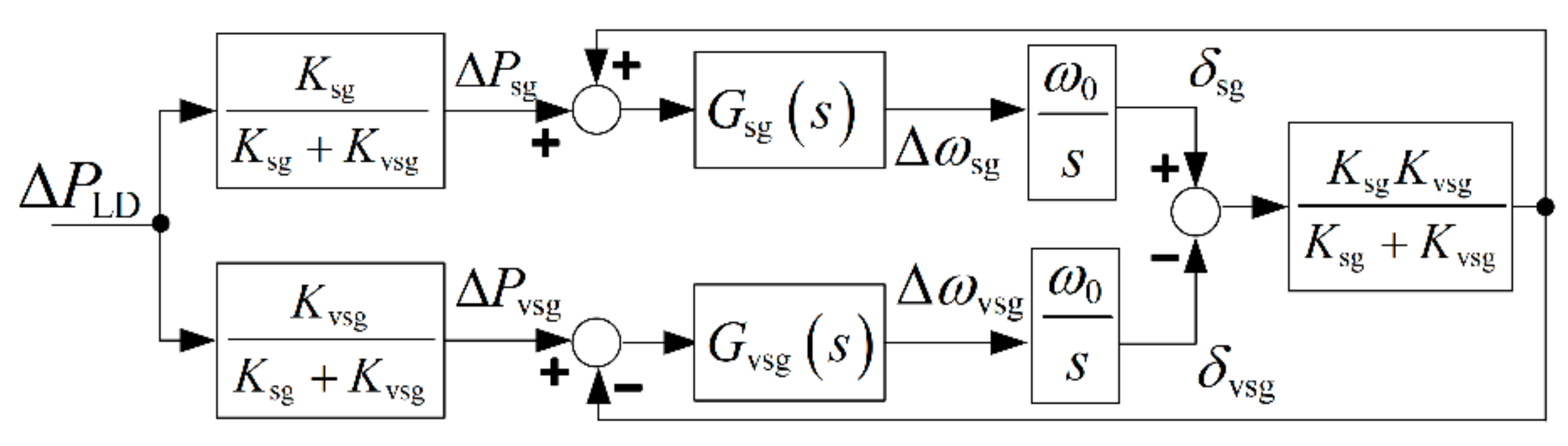
Figure 4 presents a power–frequency control block diagram of two synchronous machines [
31].
and
indicate the same responses as those in
Figure 1 and
Figure 2, and the governor models
and
are considered along with the inertial and dumping characteristics. Herein, the subscripts “sg” and “vsg” represent the SG and the contracted devices of VSG2 and VSG3 in
Figure 3, respectively, and subscript “0” represents the initial value. The block diagram in
Figure 4 shows the equation of motion (the swing equation) of the difference in rotor phase angles (
and
) in the two-machine system.
and
denote the difference when the load is added between the mechanical input and the electrical output of the generator for the SG and VSG, respectively. The mechanical input from the prime mover is received by the rotor of each generator. Equation (1) and each order term of the phase difference angles
and
in
Figure 4 represent the torque types, which can be decomposed as shown in Equation (3). Hereafter, the subscript “n” refers to either “sg” or “vsg”:
where
is the synchronization force generated when the two synchronous machines are operated in parallel, which can be represented by the feedback of an opposite force determined by multiplying the difference in the phase angle between the two machines
by
.
and
can be expressed by Equation (4):
These expressions can be simplified to and by assuming that the voltage deviations are small and that they offset the initial value of the phase difference angle. In that case, and correspond to the transient reactance of the SG () and the virtual inductance of the VSG control (), respectively.
and
can be expressed as the sum of each type of torque, as shown in Equation (5); they are input by proportionally distributing the variable load power
that corresponds to
and
, as shown in Equation (6):
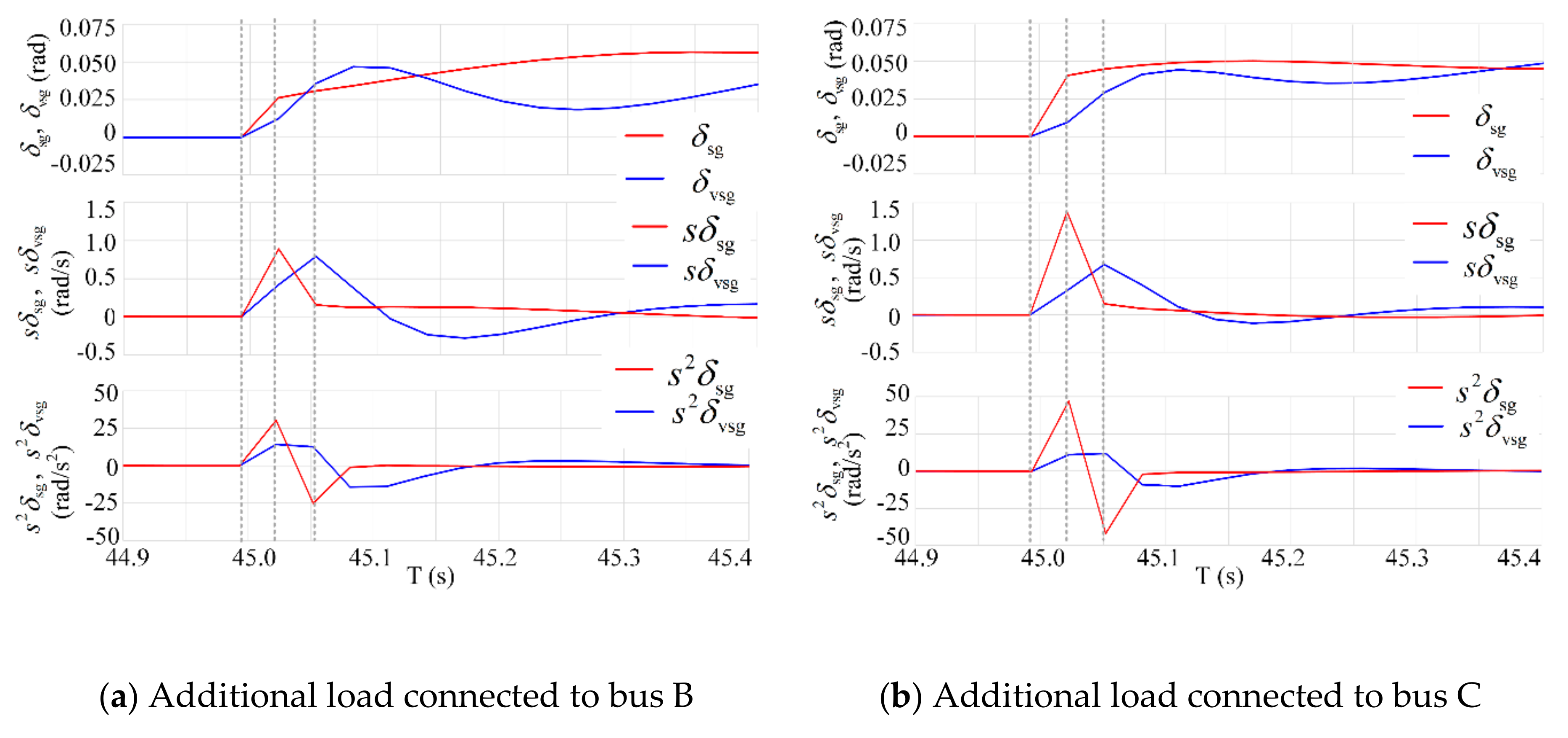
The first-order differential of the phase difference angle of the rotor is the angular velocity of the system (at the reference voltage), and the second-order differential is the inertial torque, which has a relatively large value. Therefore, in the following sections, the mechanism responsible for the frequency deviations of the system during load fluctuation is analyzed using the differential equations of the phase difference angles (Equations (3)–(6)).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}