
On the Implementation of a Micromachining Compatible MOEMS Tri-Axial Accelerometer


 ,
,  and
and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
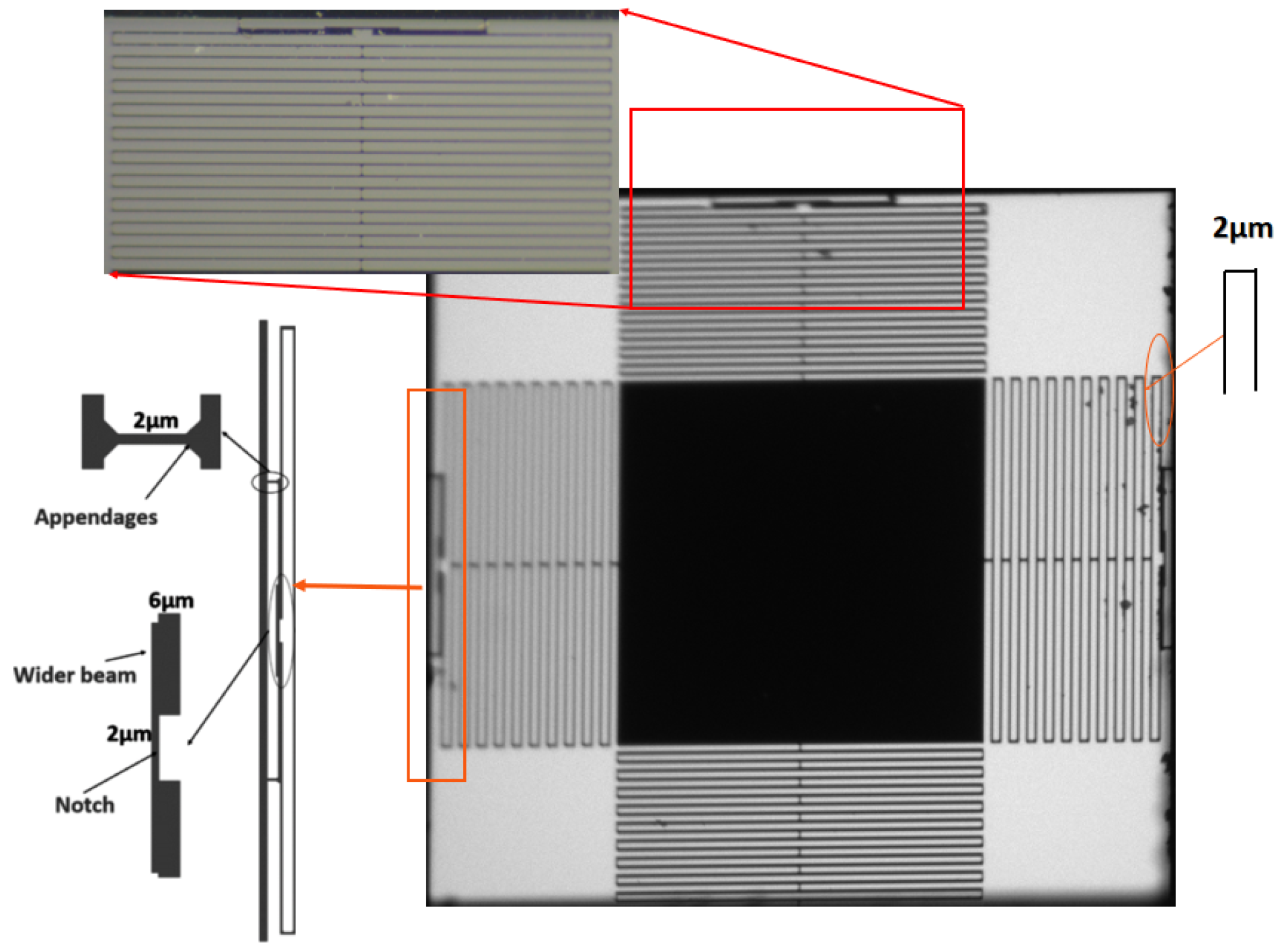
2.1. Device Structure and Operation
2.2. Mechanical Performance
2.3. Optical Modeling
2.4. QPD Responsivity
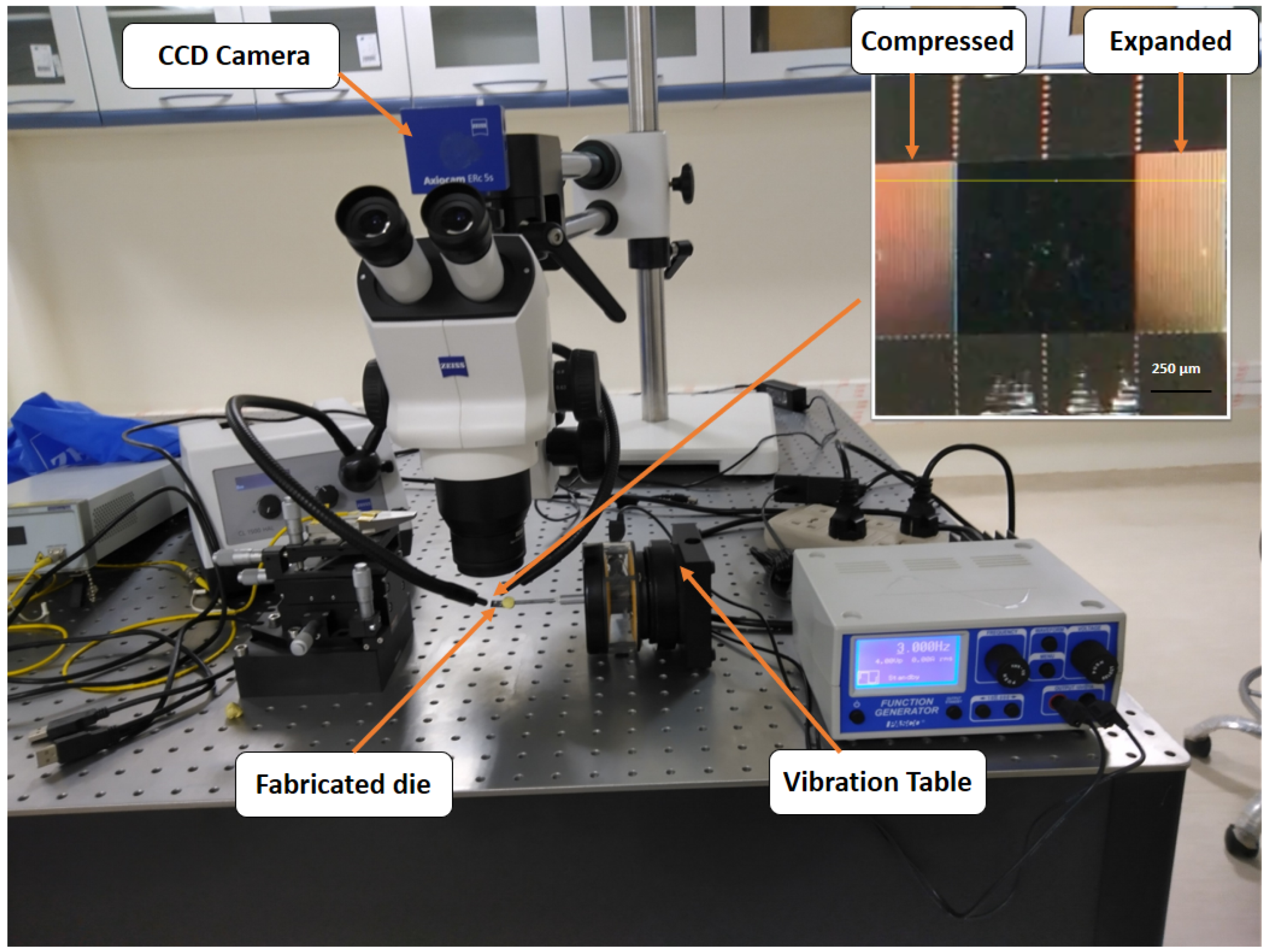
2.5. Experimental Setup
3. Results
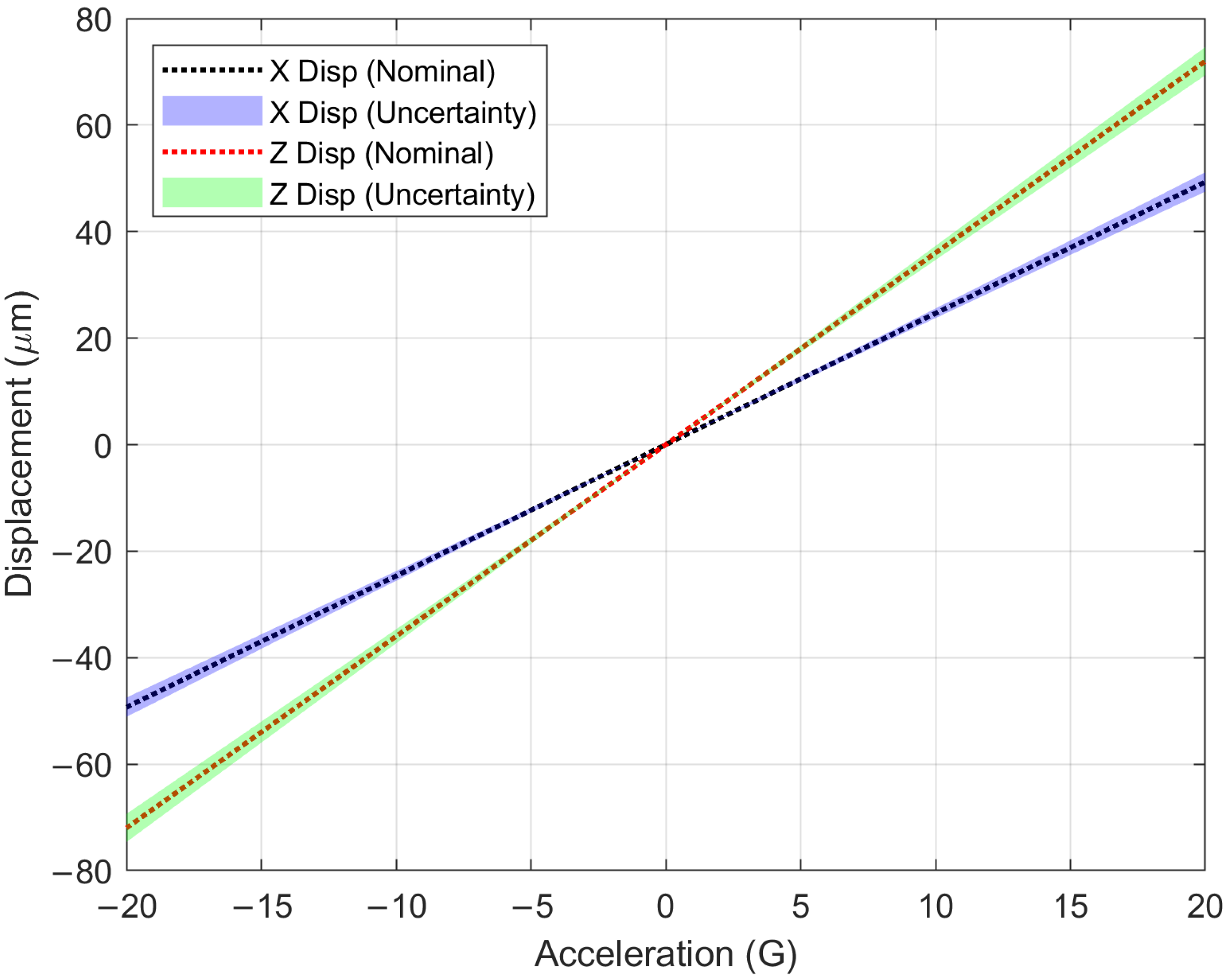
3.1. Mechanical Performance
3.2. Off-Axis Cancellation Ratios
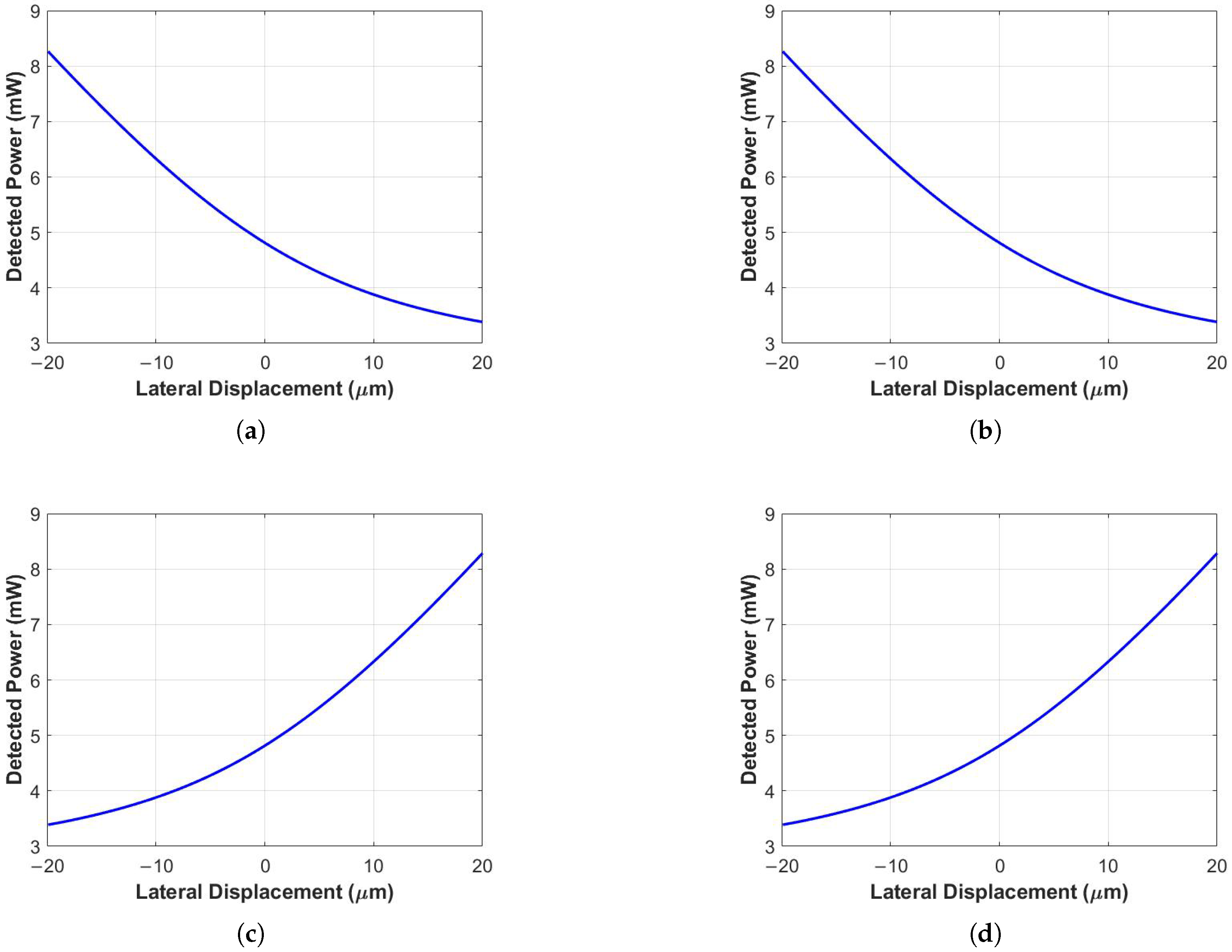
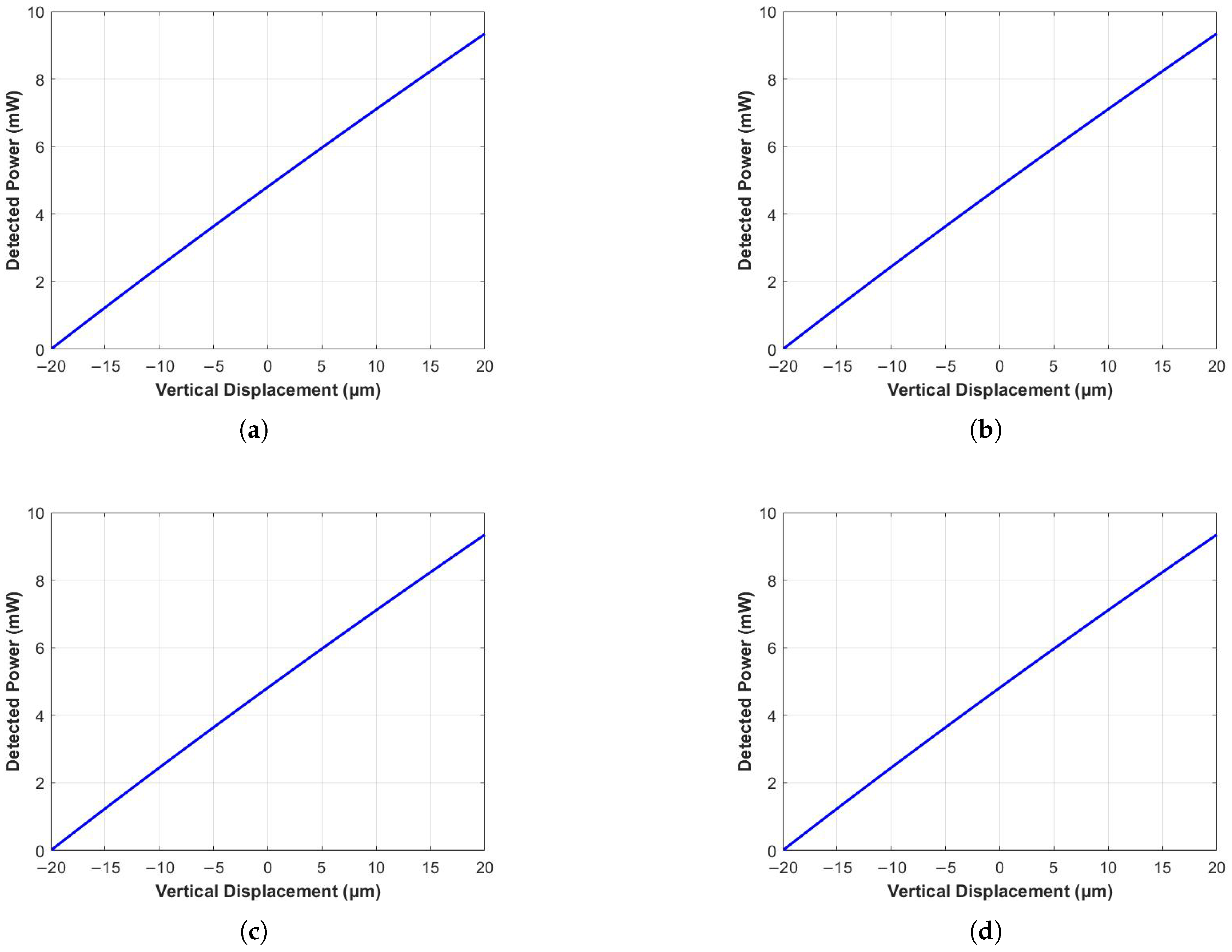
3.3. Optical Sensitivity
3.4. Total Sensitivity
3.5. Thermal Noise
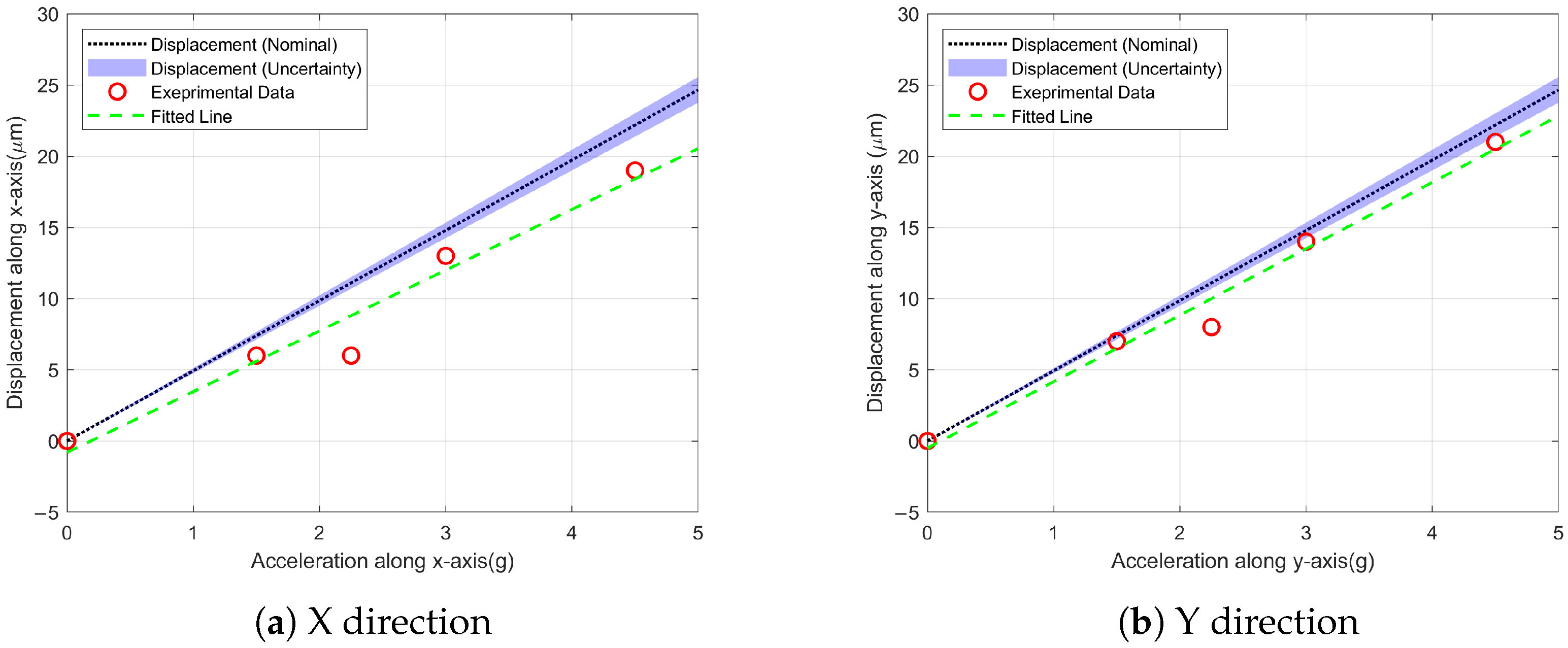
3.6. Experimental Results
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Finkbeiner, S. MEMS for automotive and consumer electronics. In Proceedings of the 2013 Proceedings of the ESSCIRC (ESSCIRC), Bucharest, Romania, 16–20 September 2013; pp. 9–14. [Google Scholar]
- Leclerc, J. MEMs for aerospace navigation. IEEE Aerosp. Electron. Syst. Mag. 2007, 22, 31–36. [Google Scholar] [CrossRef]
- Ompusunggu, A.P.; Eryılmaz, K.; Janssen, K. Condition monitoring of critical industrial assets using high performing low-cost MEMS accelerometers. Procedia CIRP 2021, 104, 1389–1394. [Google Scholar] [CrossRef]
- Lee, H.J.; Park, D.J. Analysis of thermal characteristics of MEMS sensors for measuring the rolling period of maritime autonomous surface ships. J. Mar. Sci. Eng. 2022, 10, 859. [Google Scholar] [CrossRef]
- Di Nuzzo, F.; Brunelli, D.; Polonelli, T.; Benini, L. Structural health monitoring system with narrowband IoT and MEMS sensors. IEEE Sens. J. 2021, 21, 16371–16380. [Google Scholar] [CrossRef]
- Algamili, A.S.; Khir, M.H.M.; Dennis, J.O.; Ahmed, A.Y.; Alabsi, S.S.; Ba Hashwan, S.S.; Junaid, M.M. A review of actuation and sensing mechanisms in MEMS-based sensor devices. Nanoscale Res. Lett. 2021, 16, 1–21. [Google Scholar] [CrossRef]
- Bu, K.; Li, C.; Xue, H.; Li, B.; Zhao, Y. A 14 μHz/ resolution and 32 μHz bias instability MEMS quartz resonant accelerometer with a low-noise oscillating readout circuit. Microsyst. Nanoeng. 2024, 10, 200. [Google Scholar] [CrossRef]
- Fiorillo, A.; Critello, C.; Pullano, S. Theory, technology and applications of piezoresistive sensors: A review. Sens. Actuators A Phys. 2018, 281, 156–175. [Google Scholar] [CrossRef]
- D’Alessandro, A.; Scudero, S.; Vitale, G. A Review of the Capacitive MEMS for Seismology. Sensors 2019, 19, 3093. [Google Scholar] [CrossRef]
- Medina, N.; De Vicente, J. Force Sensor Characterization Under Sinusoidal Excitations. Sensors 2014, 14, 18454–18473. [Google Scholar] [CrossRef]
- Qi, Y.; Zhao, M.; Xie, Z.; Zhang, X.; Ou, Y.; Wang, H.; Jiang, Z.; Wei, X. Fiber Fabry-Perot accelerometer with extended dynamic range and low noise floor. Opt. Express 2024, 32, 37946–37958. [Google Scholar] [CrossRef]
- Krishnamoorthy, U.; Olsson Iii, R.; Bogart, G.R.; Baker, M.; Carr, D.; Swiler, T.; Clews, P. In-plane MEMS-based nano-g accelerometer with sub-wavelength optical resonant sensor. Sens. Actuators A Phys. 2008, 145, 283–290. [Google Scholar] [CrossRef]
- Zhao, M.; Qi, Y.; Wang, H.; Xie, Z.; Li, B.; Wang, H.; Wei, X. Optical interferometric MEMS accelerometers. Laser Photon. Rev. 2024, 18, 2300713. [Google Scholar] [CrossRef]
- Nguyen, T.T.V.; Le, H.D.; Hsu, H.C.; Nguyen, C.N.; Chiang, C.C. A symmetrical dual-mass block fiber Bragg grating vibration sensor based on a V-shaped flexible hinge. Sens. Actuators A Phys. 2023, 364, 114815. [Google Scholar] [CrossRef]
- Xin, C.; Xu, Y.; Zhang, Z.; Li, M. Micro-Opto-Electro-Mechanical Systems for High-Precision Displacement Sensing: A Review. Micromachines 2024, 15, 1011. [Google Scholar] [CrossRef]
- Li, G.; Cai, C.; Zhang, Y.; Deng, X.; Lin, L.; Xiao, W. High Sensitivity Optical MEMS Accelerometer Based on a Metal Fabry-Pérot Micro-Cavities Wavelength Modulation System. IEEE Sens. J. 2024, 24, 4304–4314. [Google Scholar] [CrossRef]
- Zhao, M.; Jiang, K.; Bai, H.; Wang, H.; Wei, X. A MEMS based Fabry–Pérot accelerometer with high resolution. Microsyst. Technol. 2020, 26, 1961–1969. [Google Scholar] [CrossRef]
- Park, Y.J.; Her, M.J.; Jeong, Y.; Choi, D.J.; Kim, D.U.; Lim, M.G.; Hong, M.S.; Kwon, H.S.; Yu, K.; Han, S. Fully tunable Fabry-Pérot cavity based on MEMS Sagnac loop reflector with ultra-low static power consumption. Microsyst. Nanoeng. 2024, 10, 119. [Google Scholar] [CrossRef]
- Li, Y.; Chen, F.; Guo, T.; Wang, R.; Qiao, X. Sensitivity enhancement of fiber Bragg grating accelerometer based on short grating. IEEE Trans. Instrum. Meas. 2021, 71, 7001705. [Google Scholar] [CrossRef]
- Wang, H.; Liang, L.; Zhou, X.; Tu, B. New fiber Bragg grating three-dimensional accelerometer based on composite flexure hinges. Sensors 2021, 21, 4715. [Google Scholar] [CrossRef]
- Li, Z.; Li, X.; Chen, D.; Zhang, S.; Xian, C.; Kuang, P.; Wang, Y.; Chen, K.; Qiu, G.; Deng, G.; et al. A chip-scale silicon cavity optomechanical accelerometer with extended frequency range. IEEE Sens. J. 2024, 24, 31849–31859. [Google Scholar] [CrossRef]
- Tan, H.; Pan, D.; Wang, C.; Yao, Y. Silicon-Based Zipper Photonic Crystal Cavity Optomechanical System for Accelerometers. Micromachines 2023, 14, 1870. [Google Scholar] [CrossRef] [PubMed]
- Malayappan, B.; Lakshmi, U.P.; Rao, B.P.; Ramaswamy, K.; Pattnaik, P.K. Sensing techniques and interrogation methods in optical MEMS accelerometers: A review. IEEE Sens. J. 2022, 22, 6232–6246. [Google Scholar] [CrossRef]
- Reschovsky, B.J.; Long, D.A.; Zhou, F.; Bao, Y.; Allen, R.A.; LeBrun, T.W.; Gorman, J.J. Intrinsically accurate sensing with an optomechanical accelerometer. Opt. Express 2022, 30, 19510–19523. [Google Scholar] [CrossRef] [PubMed]
- Wang, P.; Li, T.; Lin, H.; Zhao, P.; Liu, S.; Tam, H.Y.; Zhang, A.P. Miniature Optical Fiber Accelerometer Based on an In-situ 3D Microprinted Ferrule-top Fabry–Pérot Microinterferometer. Light Adv. Manuf. 2025, 6, 152–160. [Google Scholar] [CrossRef]
- Xin, C.; Zhang, Z.; Wang, X.; Fan, C.; Li, M. Ultracompact single-layer optical MEMS accelerometer based on evanescent coupling through silicon nanowaveguides. Sci. Rep. 2022, 12, 21697. [Google Scholar] [CrossRef]
- Barbin, E.; Nesterenko, T.; Koleda, A.; Shesterikov, E.; Kulinich, I.; Kokolov, A.; Perin, A. The Design, Modeling and Experimental Investigation of a Micro-G Microoptoelectromechanical Accelerometer with an Optical Tunneling Measuring Transducer. Sensors 2024, 24, 765. [Google Scholar] [CrossRef]
- Long, D.; Stroud, J.; Reschovsky, B.; Bao, Y.; Zhou, F.; Bresler, S.; LeBrun, T.; Plusquellic, D.; Gorman, J. High accuracy, high dynamic range optomechanical accelerometry enabled by dual comb spectroscopy. APL Photon. 2023, 8, 091302. [Google Scholar] [CrossRef]
- Li, C.; Yang, B.; Zheng, X.; Sun, Z.; Zhou, L.; Huang, X.; Guo, X. An Optical Interferometry Based MEMS Accelerometer Applicable to Seismic-Grade Measurement. IEEE Trans. Instrum. Meas. 2022, 71, 7503810. [Google Scholar] [CrossRef]
- Zhou, Y.; Cao, H.; Guo, T. A hybrid algorithm for noise suppression of MEMS accelerometer based on the improved VMD and TFPF. Micromachines 2022, 13, 891. [Google Scholar] [CrossRef]
- Jin, L.; Xie, K.; Du, Y.; Li, M. Linearization signal conditioning circuit for tri-axial micro-grating MOEMS accelerometer. Opt. Express 2024, 32, 10241–10251. [Google Scholar] [CrossRef]
- Wang, C.; Cui, Y.; Liu, Y.; Li, K.; Shen, C. High-G MEMS accelerometer calibration denoising method based on EMD and time-frequency peak filtering. Micromachines 2023, 14, 970. [Google Scholar] [CrossRef] [PubMed]
- Abozyd, S.; Toraya, A.; Gaber, N. Design and Modeling of Fiber-Free Optical MEMS Accelerometer Enabling 3D Measurements. Micromachines 2022, 13, 343. [Google Scholar] [CrossRef] [PubMed]
- AboZyd, S.; Toraya, A.; Gaber, N. Tri-axial optical MEMS accelerometer enables monolithic fabrication. In Proceedings of the MOEMS and Miniaturized Systems XXI, San Francisco, CA, USA, 22–27 January 2022; Zappe, H., Piyawattanametha, W., Park, Y.H., Eds.; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 2022; Volume 12013, p. 120130K. [Google Scholar] [CrossRef]
- ORSAM Opto Semiconductors SFH 4770S, IR SYNIOS P2720 (850 Nm)—120∘. Available online: https://docs.rs-online.com/5c87/0900766b814deb8f.pdf (accessed on 20 February 2025).
- QP5.8-6 TO, Quadrant Photodetector Data Sheet, First Sensor. Available online: https://www.mouser.com/datasheet/2/313/QP5.8-6_TO_501254-586546.pdf (accessed on 20 February 2025).
- Cowen, A.; Hames, G.; Monk, D.; Wilcenski, S.; Hardy, B. SOIMUMPs Design Handbook; MEMSCAP: Durham, NC, USA, 2011; Volume 6. [Google Scholar]
- Moreno, I. LED irradiance pattern at short distances. Appl. Opt. 2020, 59, 190–195. [Google Scholar] [CrossRef] [PubMed]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elsayed, A.H.; Abozyd, S.; Toraya, A.; Mansour, M.A.; Gaber, N. On the Implementation of a Micromachining Compatible MOEMS Tri-Axial Accelerometer. Chips 2025, 4, 28. https://doi.org/10.3390/chips4020028
Elsayed AH, Abozyd S, Toraya A, Mansour MA, Gaber N. On the Implementation of a Micromachining Compatible MOEMS Tri-Axial Accelerometer. Chips. 2025; 4(2):28. https://doi.org/10.3390/chips4020028
Chicago/Turabian StyleElsayed, Ahmed Hamouda, Samir Abozyd, Abdelrahman Toraya, Mohamed Abdelsalam Mansour, and Noha Gaber. 2025. "On the Implementation of a Micromachining Compatible MOEMS Tri-Axial Accelerometer" Chips 4, no. 2: 28. https://doi.org/10.3390/chips4020028
APA StyleElsayed, A. H., Abozyd, S., Toraya, A., Mansour, M. A., & Gaber, N. (2025). On the Implementation of a Micromachining Compatible MOEMS Tri-Axial Accelerometer. Chips, 4(2), 28. https://doi.org/10.3390/chips4020028