1. Introduction
Facing the global sulfur limitations in maritime fuels and the existing IMO Tier III legislation, the importance of liquified natural gas (LNG) as a fuel has increased in the past years. For medium speed engines, the dual-fuel (DF) combustion process is the state of the art in using LNG as fuel [
1,
2]. Therefore, the gaseous fuel is injected in the intake manifold, resulting in a homogeneous natural gas/air mixture which is ignited by a pilot injection of diesel fuel. The natural gas then burns in a lean burn Otto cycle. Due to the high energy content of the pilot fuel, a very lean but stable combustion process is achieved, which results in low NOx-emissions. Thus, the recent IMO Tier III legislation can be fulfilled by dual-fuel engines without exhaust aftertreatment [
1,
2]. Furthermore, due to the composition of LNG, which is mainly methane, the CO
2-emissions are reduced by approximately 20% compared to diesel engines, resulting from the lower C/H ratio of methane [
3].
Besides the aforementioned positive effects of the lean-burn Otto cycle, this combustion process leads to different limitations. On the one hand DF-engines are limited by cycle-to-cycle variations and unburned hydrocarbons and on the other hand by the knock limit. Furthermore, the NOx-emissions are a limiting factor for the engine operation.
In the development process of large engines, 1D-simulation plays an important role [
4,
5]. To minimize the operation of large engines at the testbed accurate simulation models are necessary to simulate performance and emissions.
In the past decade, multiple authors published combustion models for pilot ignited dual-fuel engines. Something they all have in common is that every model consists of a spray model for the pilot injection and the ignition delay and a flame propagation model for the combustion of the natural gas/air mixture. For a brief overview, the combustion models may be categorized according to the spray model which is included. The majority is based on the package model of Hiroyasu, which discretizes the fuel spray in multiple packages in axial and radial direction [
6]. The spray penetration is calculated with an empirical correlation which is based on experiments of diesel jets with relatively long injection durations. Each of the packages of the spray is treated as a thermodynamic zone, whose temperature results from the entrained cylinder charge and the evaporation of the liquid fuel. Thus, in each zone, an independent ignition delay calculation is applied.
Krishnan et al. [
7] use the Shell model [
8] to calculate the autoignition inside each package. After ignition the content of each package is burned, whereas diesel and natural gas are burned separately. For the combustion of the surrounding NG/air mixture a turbulent entrainment model is applied, which calculates the flame front are from the burned packages, but without consideration of any geometrical assumptions of the flame front.
Walther et al. [
9] implied a Livengood–Wu integral [
10] to each package in the spray model using an ignition delay correlation derived from reaction kinetics calculations. After ignition the spray model is terminated, and all the fuel is burned with a turbulent entrainment model. The flame front is assumed as cone shaped in the beginning of the combustion and the transitions to a hemispherical flame front, whereas the spray cone angle and the initial size of the flame front are derived from optical investigations. The model was validated against measurement data from a high-speed dual-fuel engine. A similar approach was presented in Ref. [
11] and validated against measurement data from a 1.95 L four-cylinder diesel engine, operated in dual-fuel mode with biogas as main fuel. In Ref. [
12], the same approach is applied in a real-time capable hardware in the loop application and validated with a heat release rate from a medium-speed dual-fuel engine.
Krenn et al. [
13] also calculated a Livengood–Wu integral in each package of the spray model. For the turbulent entrainment model a club shaped flame front is assumed, which is not limited by the cylinder walls. Every package that is ignited is transferred to the turbulent entrainment model and burned under consideration of the faster laminar flame speed resulting from the pilot fuel inside the package. The model is validated in Ref. [
13] for a high speed and a medium speed engine at medium and high load and in Ref. [
14] for a medium speed engine at low load.
In Ref. [
15], the ignition delay is calculated in each package using tabulated ignition delay times. Each ignited package is then burned within a reaction time, derived from reaction kinetics calculations. For the NG/air mixture a fractal model is implemented, including a new flame front model with one spherical flame front for each injector hole. The model is validated in Ref. [
15] against measurement data of a 2-L 4-cylinder diesel engine, equipped with NG port fuel injection and operated in dual-fuel mode.
The dual-fuel combustion model available in GT-Power is a combination of the three-zone diesel combustion model DIPulse, which also uses a steady-jet spray penetration correlation and the turbulent entrainment model SITurb. The model is described in detail in Ref. [
16] and applied for a low-speed two stroke dual-fuel engine equipped with a pre-chamber for the pilot fuel ignition. In Ref. [
17], the model is extended with a new ignition delay correlation derived from reaction kinetics calculations and the ignition delay calculation is validated for a medium speed dual-fuel engine.
Musculus and Kattke presented a 1D spray model in Ref. [
18], which can describe the end of injection transients resulting in significant higher mixing of the spray after the end of injection. This topic is especially relevant for dual-fuel engines, because the short injection of the pilot fuel is usually finished before the ignition takes place.
In Ref. [
19], the authors combine the 1D spray model with the ignition delay model from Ref. [
20]. The ignition of the spray is assumed to occur in the spray tip, as this is the richest spot of the spray for longer ignition delays. The model is combined with a vibe burn rate to model the combustion of a 2-L 4-cylinder diesel engine converted to dual-fuel operation.
A similar approach, consisting of the 1D spray model and an ignition delay model is presented in Ref. [
21] and validated against measurement data from a medium speed engine operated in diesel and dual-fuel combustion mode. For ignition delays shorter than the injection duration, the ignition is assumed to take place at the spray tip, whereas for longer ignition delay periods the ignition is assumed to take place at the trailing edge of the spray.
In a previous work of the authors, an ignition delay model for medium speed dual-fuel engines was presented [
22]. The model combines a 1D spray model with a mixing-controlled evaporation model and an approach for 2-stage autoignition, including the low temperature heat release. In the present work, the ignition delay model is used as base for a predictive combustion model which also accounts for incomplete combustion. The model is then implemented in GT-Power and coupled with a NOx-model and a knock model from literature. The models are calibrated with measurement data and validated against a huge variety of measurement data from a single cylinder medium speed dual-fuel engine, including a full engine map and extensive variation of injection timing and air-to-fuel ratio at selected operation points.
2. Ignition Delay
The ignition delay model was presented in detail in Ref. [
22] and is, therefore, only briefly described in the following. The spray model used to simulate the spray behavior of the pilot injection is the 1D transient spray model from Musculus and Kattke, which is described in detail in Ref. [
18]. The 1D spray model models a 2-phase jet with liquid fuel, using a 1D Eulerian control volume approach, as illustrated in
Figure 1.
The spray angle
is an input value of the spray model [
18]. In the present work, the spray angle is calculated with the empirical correlation according to Siebers [
23]:
In Equation (1) the spray angle depends on the liquid fuel density
and the ambient gas density
. For the factor
, the value 0.26 is used, as suggested in Ref. [
23]. In each control volume the radial fuel and velocity distribution are calculated with an Abramovich distribution as follows:
The liquid fuel concentration
is related to the value at the centerline
by the dimensionless radius
. The exponent
is 1.5 for a fully developed distribution. The velocity distribution is calculated analogous to Equation (2). The spray is then modelled by mass conservation of the liquid fuel in Equation (3) and momentum conservation in Equation (4):
In Equation (3),
is the mass and
is the density of the liquid fuel. The overbars on the liquid fuel fraction
and the velocity
denote that these values are cross-sectional averages. The value
results from integrating the fuel and velocity distribution over the cross-section area
[
18]. The subscripts
i and
j denote the control volume (c.f.
Figure 1) and the timestep, respectively, with the time-step size
. In Equation (4) the momentum
of the control volume is calculated using the mean density of the control volume
.
With the aforementioned equations the axial fuel distribution inside the spray is calculated in every timestep. Due to the application of the radial Abramovich distribution from Equation (2), a pseudo-2D fuel distribution as shown in
Figure 2 is calculated at every timestep. The spray model neglects the cylinder walls. However, the control volumes are defined for a length longer than the theoretical distance between the injector and the cylinder wall, to not lose any fuel in the mass balance, which could leave the last control volume. The control volumes outside the combustion chamber are then treated different during calculation of the ignition delay.
The spray model neglects evaporation; therefore, a mixing-controlled evaporation model is implemented to derive a temperature distribution inside the spray. Following the work of Siebers, the time limiting process for an evaporating diesel jet is the mixing with the surrounding ambient gas [
23]. Thus, the minimum possible air-to-fuel ratio which can fully evaporate only depends on the boundary conditions pressure and temperature and can therefore be calculated a priori. Using n-heptadecane as reference fuel, as suggested in Ref. [
23], a look-up table for the minimum possible fully evaporated air-to-fuel ratio is implemented.
Furthermore, an explicit solution for the mixing temperature of the fully evaporated part of the fuel was developed [
22]. With this mixing temperature a temperature distribution inside the spray is calculated at every timestep. Thus, all relevant information for the calculation of the local reactivity is available.
To calculate the ignition of the pilot fuel, an ignition delay model is developed in Ref. [
22] based on homogeneous reactor calculations using the open-source software Cantera [
24]. The extended n-heptane mechanism from the Lawrence Livermore National Laboratories [
25] is used with n-heptane as reference for the pilot fuel and methane as reference for the natural gas. Correlations for the low and high temperature ignition delay time, as well as the temperature increase due to low temperature heat release (LTHR), are fitted against the results of the reaction kinetics calculations. All correlations are published in Ref. [
22].
Figure 3a shows an exemplary fuel distribution inside a control volume plotted over the dimensionless radius r/R. The mixing temperature T
mix in
Figure 3b results from the mixing and evaporation of the pilot fuel and is, therefore, the coldest at the richest spot. After the LTHR, the opposite is the case, as the higher fuel concentration leads to a higher temperature increase ΔT. Resulting from the temperature and fuel distribution two different profiles of the local reactivity occur, which are presented in
Figure 3c by the local ignition delay time. Before the first stage of ignition has occurred, both the low and high temperature ignition delay times have their minimum value, which defines the most reactive mixture, in the leaner region. This minimum results from the contrary effects of the decreasing fuel concentration leading to lower reactivity and the increasing temperature leading to higher reactivity. Thus, after the LTHR has occurred, the most reactive mixture is at the centerline of the spray, because this is the hottest and richest spot.
To trace the reaction progress inside the spray, two progress variables,
and
are introduced for the first and second stage of ignition respectively. For both progress variables, the following transport equation is applied:
The subscripts
i and
j denote the control volume (c.f.
Figure 1) and the timestep, respectively, with the time-step size
. The reaction progress
c is coupled to the mass of the pilot fuel
and the respective mass flow
. The term
accounts for the chemical reactions inside the control volume by integrating the inverse of the ignition delay time over the timestep at the position of the most reactive mixture inside the control volume [
22]. To account for wall contact of the spray, the reaction term is set to zero for all control volumes that are located outside the combustion chamber. The overmixing term
accounts for the dilution of the spray during long ignition delay times. If the spray gets very lean before ignition, the dilution of the pre-reaction products leads to a prolongation of the ignition process. In this case, the overmixing term is calculated as follows:
The model parameter is set to unity in this project. If measurement data for non-igniting early injections is available, this can be used to calibrate the ignition limits.
Figure 4a shows an exemplary evolution of the axial fuel distribution of a pilot injection up to ignition and
Figure 4b shows the respective reaction progress for the high temperature ignition. Ignition occurs if the progress variable reaches unity.
3. Combustion
After ignition, the spray model is terminated and the combustion models are initialized. To account for the inhomogeneous fuel distribution inside the combustion chamber, the spray zones, which are richer than the homogenous NG/air mixture, are burned separately. Based on the fuel distribution inside the spray (c.f.
Figure 2) the complete spray is burned with a model for premixed combustion, if at least 95% of the spray is fully premixed (c.f.
Section 3.2). Otherwise, if a relevant part of the spray is not yet fully premixed, this part of the spray is burned as mixing-controlled combustion (c.f.
Section 3.1). The homogeneous NG/air mixture is burned with a turbulent entrainment approach (c.f.
Section 3.3) and the transition between the premixed combustion stages is explained in
Section 3.4.
3.1. Mixing-Controlled Combustion
For the mixing-controlled combustion, the approach from Magnussen [
26] is slightly modified and the burn rate is calculated according to Equation (7):
In Equation (7) the mixing-controlled burn rate depends on the available mass , the turbulent kinetic energy and the integral length scale . The parameter is used for model calibration.
3.2. Premixed Combustion of the Pilot Spray
For the fully premixed part of the spray, a turbulent flame propagation is assumed, which is calculated as follows:
According to Equation (8), the flame front with the flame front area propagates with the turbulent flame speed throughout the unburned mixture with the density . The transition term transitions between the two phases of the combustion and the parameter is used for calibration. The transition term, as well as the sub-models used for the turbulent flame speed and the flame front area, is further explained in the respective subsections.
3.3. Premixed Combustion of the Homogeneous NG/Air Mixture
For the homogeneous NG/air mixture, the combustion is modelled with a turbulent entrainment model which was originally published by Blizard and Keck [
27] and further developed for modelling SI engines by multiple authors. The combustion process is split in two steps. In the first step, the mass is entrained into the flame front:
The entrained mass flow results from the flame front
, which propagates with the turbulent flame speed
into the unburned premixed cylinder charge with the density
. The parameter
is used for calibration. The mass available for the combustion inside the flame front is calculated according to Equation (10), based on the total entrained mass
inside the flame front, the already burned mass
, and the quenched mass at the cylinder walls
. The latter one is further described in
Section 3.8.
In the second step of the combustion in the turbulent entrainment model, the available mass inside the flame front is burned during the burnup time
:
Based on the recent findings from Ref. [
28], the burnup time is calculated from the integral length scale
and the turbulent flame speed
. The parameter
is added for model calibration.
For the calculation of the turbulent flame speed for this case, a mixing temperature inside the flame front is used. With Equation (13) the temperature
is calculated from the burned and unburned zone temperatures
and
respectively, which are weighted by the respective mass fractions inside the flame front.
3.4. Transition between Combustion Phases
As presented in the previous subsections, the submodels for the premixed combustion of the pilot spray and the homogeneous NG/air mixture both use the flame front area
(c.f. Equations (8) and (9)). Thus, the transition factor
is introduced to share the flame front area between the two submodels or the two phases of the combustion process respectively.
The transition factor depends on the combustion progress of the premixed pilot spray
and the equivalence ratios of the homogeneous NG/air mixture and the pilot fuel respectively. Thus, the transition factor is related to the premixedness of the pilot spray. As one can see in
Figure 5, this results in a good representation of the combustion behavior for shorter and longer ignition delays times.
3.5. Laminar and Turbulent Flame Speed
For the laminar flame speed of the NG/air mixture two models from literature are combined. The model published in Ref. [
29] predicts the laminar flame speed for methane-based fuels, including the components ethane, propane, butane, and hydrogen. A model for the laminar flame speed of methane was fitted against reaction kinetics calculations and the increase of the flame speed due to higher hydrocarbons and hydrogen is included by a pre factor. However, the model presented in Ref. [
29] is only valid up to an air-to-fuel ratio of λ = 2. Therefore, the influence of the higher hydrocarbons and hydrogen which is published in Ref. [
29] is combined with the laminar flame speed model for methane published in Ref. [
28], which is valid up to λ of 5.
For the pilot spray, it is also relevant to account for the pilot fuel. To take this into account, the laminar flame speed model for n-heptane from Ref. [
30] is included, which is also based on reaction kinetics calculations. As both fuels are mixed in the pilot spray zone, the laminar flame speeds are combined, using the approach presented in Ref. [
31]. In Ref. [
31] it was shown by reaction kinetics calculations that a linear interpolation based on the mol-fractions of the respective fuels provides sufficient results for the relevant mixtures inside the pilot spray of a dual-fuel engine.
For the turbulent flame speed, the model of Peters [
32] is applied, which depends on the laminar flame speed, the laminar flame thickness, the mean turbulent velocity, and the turbulent length scale. The turbulence-related input parameters of the model are available from the turbulence model in GT-Power, whereas for the laminar flame thickness, the approach from Ref. [
28] is used.
3.6. Flame Front Model
Based on the results of the optical investigations from Ref. [
9] and different 3D CFD simulations published in Refs. [
31,
33,
34,
35], the following approach for the geometry of the flame front was derived:
In the beginning, the flame front consists of multiple cones with spherical tip, whereas the number of cones equals the number of holes in the injector nozzle;
Adjacent flames can merge to one flame front;
The flames are extinguished at the cylinder walls due to flame quenching at the contact areas of the flame front and the cylinder walls.
As a 3D simulation of the flame front would be out of the scope for a 0D/1D simulation environment, some simplifications are made to reduce the complexity which are illustrated in
Figure 6:
The combustion chamber is modelled with a pancake geometry;
The single flames are assumed to be symmetrical and the spray origin is located at the center of the combustion chamber. Thus, the combustion chamber is cut in symmetrical sections according to the number of injector nozzle holes, whereas only one section is modelled;
In the first phase of the combustion (
Figure 6a,b), the flame front is cone shaped with a spherical tip, until the length of the cone equals the spray penetration in the spray model at the start of combustion (l
SOC);
In the second phase of the combustion
Figure 6c,d, the flame front spreads perpendicular to the flame surface. The adjacent flames merge and at the wall contact areas the flame front is distinguished.
For the actual calculation of the flame front, the section of the combustion chamber is cut in slices in axial direction of the spray and the flame surface is calculated using a numerical root-finding algorithm. A more detailed description of the flame front modeling approach can be found in Ref. [
36].
3.7. NOx Emissions
The NOx emissions are modelled using the Extended Zeldovich Mechanism, which is available as a built-in template in GT-Power. The version used in this work uses the same reaction rate parameters as published by Heywood [
37]. For the calibration of the model a NOx multiplier can be adjusted in GT-Power, which is simply a multiplier for the simulated NOx emissions.
3.8. Unburned Hydrocarbons
For the unburned hydrocarbons, three different sources are considered: scavenging, and flame quenching in crevice volumes and on the combustion chamber walls. The fuel, which is scavenged during valve overlap, is directly modelled due to the gas exchange simulation in GT-Power. In addition to this, two models are implemented for the unburned hydrocarbons resulting from flame quenching on the combustion chamber walls and flame quenching inside crevice volumes.
The flame quenching at the combustion chamber walls is simulated with the model presented in Ref. [
38], which is based on the thermal approach for the quench layer thickness from Ref. [
39]. At each wall, the quench layer thickness
is calculated as follows:
In the numerator is the thermal conductivity, whereas and are the burned zone temperature and the wall temperature respectively. The index denotes the values inside the quench layers, whereas the index denotes the respective combustion chamber walls: head, piston and liner. In the denominator in Equation (15) and are the mass fraction of the natural gas and the respective lower heating value, is the laminar flame speed and the density of the unburned cylinder charge.
With the quench layer thickness and the respective areas where the flame is quenched at the cylinder walls, the quenched mass for the combustion chamber wall is calculated as follows:
The area of the respective cylinder walls is calculated by the flame front model. The factor is used to calibrate the model. The total mass of unburned mixtures due to flame quenching at the walls (c.f. Equation (10)) results as sum of the masses quenched at cylinder head, piston and liner.
In addition to the flame quenching at the cylinder walls, a crevice volume is added. Assuming that the crevice volume contains only the unburned homogeneous natural gas/air mixture, the mass inside the crevice volume is calculated with the density of the unburned zone.
3.9. Knock
Knocking combustion is one major limitation for dual-fuel engines. As knock occurs due to autoignition of unburned mixture, a common approach for knock model in 0D/1D simulation is the knock integral, which is based on the work of Livengood and Wu [
10]:
The value of the knock integral
KI is calculated by integrating the inverse of the ignition delay time, which can be interpreted as the reaction rate. Knock occurs if the value of
KI reaches a certain threshold. In this work, the model of Urban et al. [
40] is used. In Ref. [
40], a detailed model for the ignition delay time of methane-based fuels is published, which includes higher hydrocarbons up to butane and hydrogen. As suggested in Ref. [
40], the value of
KI is evaluated at the time with the highest unburned zone temperature. For calibration of the knock model only the threshold of
KI for knocking combustion has to be selected, based on one operation point with 5% knock frequency.
5. Conclusions
In this paper, a predictive combustion model for medium speed dual-fuel engines was developed, implemented in GT-Power and validated for a wide range of boundary conditions.
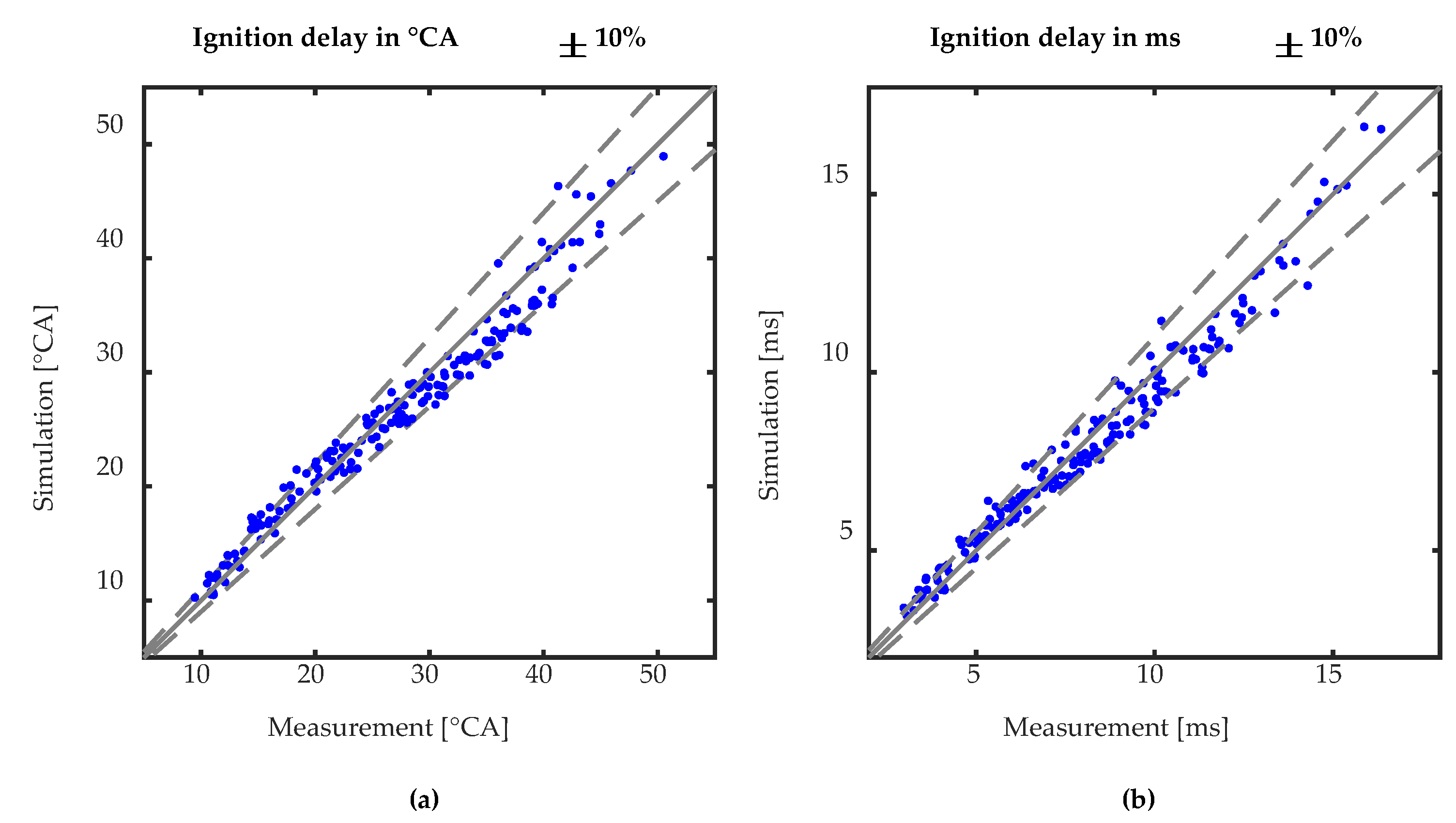
The pilot injection is modelled with the 1D spray model from Musculus and Kattke. The model is extended with a mixing limited evaporation model and a new model to calculate the temperature distribution inside the spray. The ignition process is simulated with a detailed 2-stage ignition delay model, which was built based on extensive reaction kinetics calculations. The reaction progress inside the spray is tracked via a new transport equation, including the effect of overmixing. The ignition delay model is able to predict the start of combustion correctly for all relevant boundary conditions. In this work, no parameter of the ignition delay model was calibrated against measurement data, proving the capabilities of the chosen physical/chemical approach.
After ignition, the spray model is terminated and the mixture inside the spray is used to initialize the combustion model. To account for the different fuels in the combustion chamber, the unburned zone is divided in different pseudo sub-zones, which are burned with different combustion models using state of the art sub-models from literature. For the flame propagation, a new flame front model was developed which calculates the flame front in the first part of the combustion as cone shaped single flames which later merge into one flame front. The combustion model shows good prediction of the relevant combustion parameters over the engine map. To improve the results, one parameter of the entrainment model was extended with an empirical correlation.
For the NOx-emissions, the Extended Zeldovich Mechanism, available as a built-in template in GT-Power, showed good results.
As the test engine showed partially high HC-emissions, two models were implemented to estimate flame quenching in crevice volumes and on the combustion chamber walls, respectively. As the HC-emissions showed trends that are not only related to flame quenching, the latter one was extended by an empirical correlation which summarizes multiple other influences on the HC-emissions. This results in a satisfactory prediction of the unburned fuel and thus improves the prediction of BSFC. This empirical correlation can be seen as one shortcoming of the presented model which needs further investigation.
For knock prediction a model from literature was implemented. The knock-limited MFB50 is predicted with an accuracy of approx. ±2 °CA for different charge air temperatures and different air-fuel ratios at one operation point with 450 1/min and 9.1 bar BMEP.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}