
Ultra-Small Temperature Sensing Units with Fitting Functions for Accurate Thermal Management

Abstract
1. Introduction
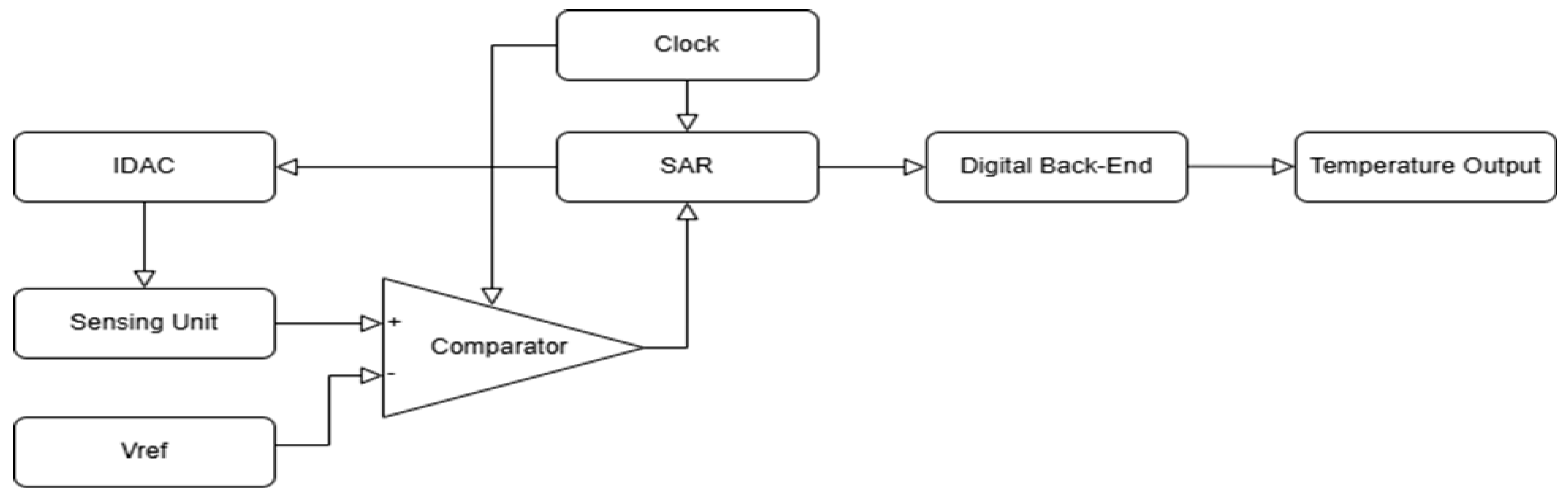
2. Proposed Architecture
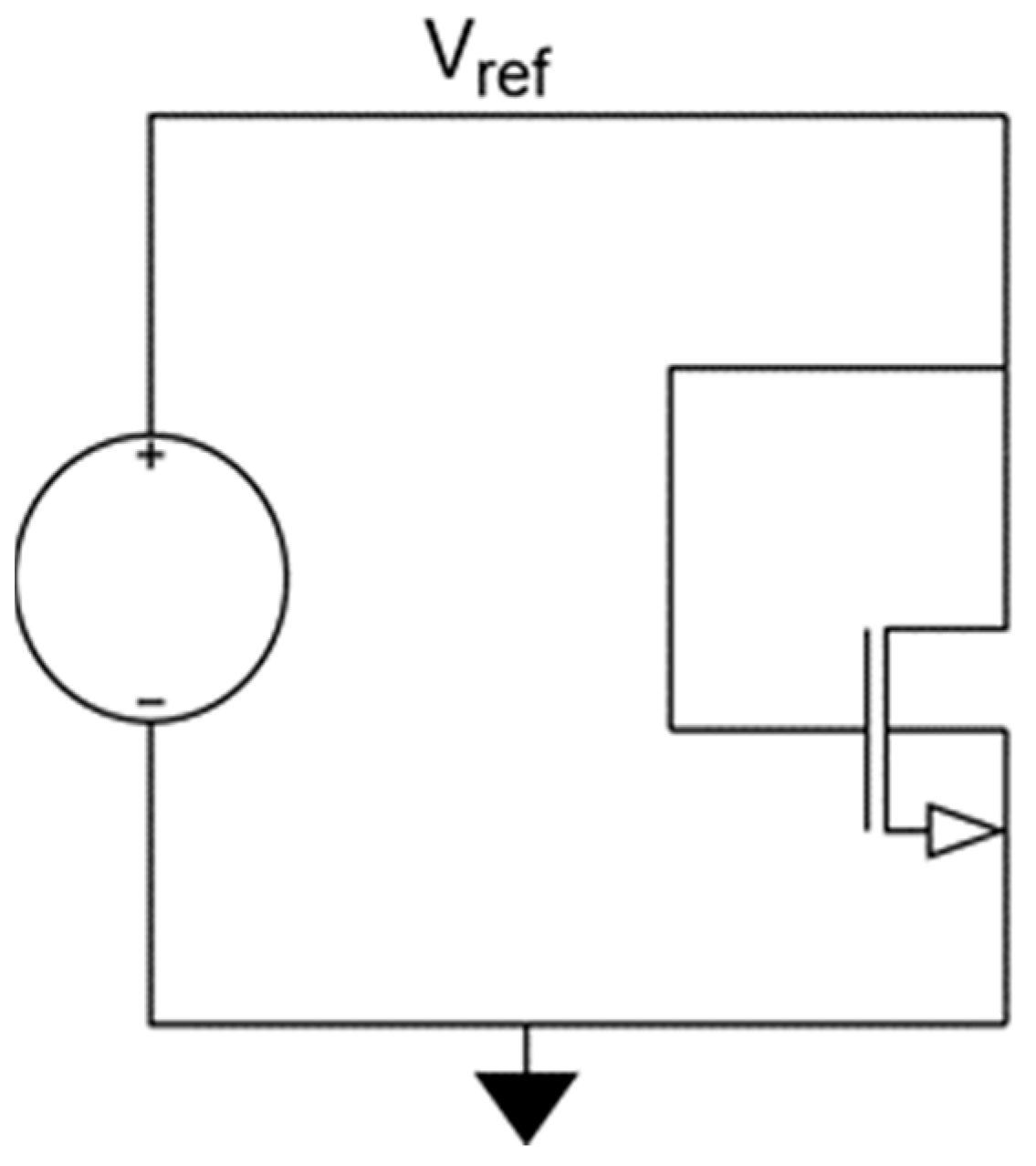
3. Sensing Unit and Fitting Function Design
3.1. Selection Methodology
3.2. Fitting Functions
3.3. Simulations
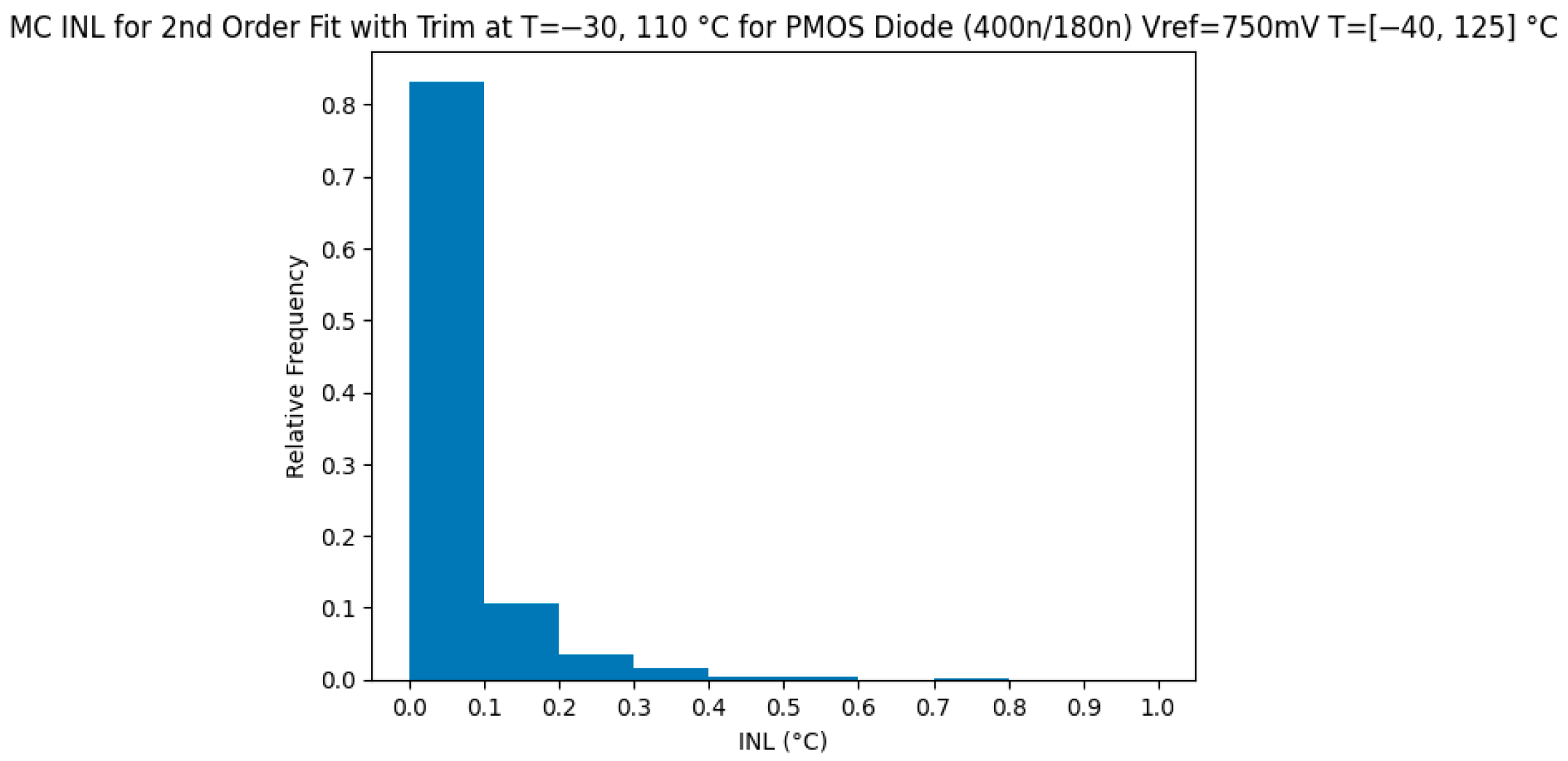
4. Linearity and Yield Evaluation of the Proposed Design
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fang, Y.; Liu, T.; Sun, D. Research on Novel Thermal Management Technology in the Field of Integrated Circuits. In Proceedings of the 2024 25th International Conference on Electronic Packaging Technology (ICEPT), Tianjin, China, 7–9 August 2024; pp. 1–6. [Google Scholar] [CrossRef]
- Singh, P.; Zhuo, C.; Karl, E.; Blaauw, D.; Sylvester, D. Sensor-Driven Reliability and Wearout Management. IEEE Des. Test Comput. 2009, 26, 40–49. [Google Scholar] [CrossRef]
- Duarte, D.E.; Taylor, G.; Wong, K.L.; Mughal, U.; Geannopoulos, G. Advanced thermal sensing circuit and test techniques used in a high performance 65 nm processor. In Proceedings of the 2007 International Symposium on Low Power Electronics and Design (ISLPED ′07), Portland, OR, USA, 27–29 August 2007; pp. 304–309. [Google Scholar] [CrossRef]
- Zhao, C.; Wang, Y.-T.; Genzer, D.; Chen, D.; Geiger, R. A CMOS on-chip temperature sensor with −0.21 °C 0.17 °C inaccuracy from −20 °C to 100 °C. In Proceedings of the 2013 IEEE International Symposium on Circuits and Systems (ISCAS), Beijing, China, 19–23 May 2013; pp. 2621–2625. [Google Scholar] [CrossRef]
- Aprile, A.; Folz, M.; Gardino, D.; Malcovati, P.; Bonizzoni, E. An Area-Efficient Smart Temperature Sensor Based on a Fully Current Processing Error-Feedback Noise-Shaping SAR ADC in 180-nm CMOS. IEEE J. Solid-State Circuits 2023, 59, 716–727. [Google Scholar] [CrossRef]
- Tang, J.; Tang, X. A 12.6-pJ/Conversion Temperature Sensor With 0.98-mV/K Temperature-Voltage Sensitivity. IEEE Trans. Circuits Syst. II Express Briefs 2025, 72, 449–453. [Google Scholar] [CrossRef]
- Aprile, A.; Bonizzoni, E.; Malcovati, P. Temperature-to-digital converters’ evolution trends and techniques across the last two decades: A review. Micromachines 2022, 13, 2025. [Google Scholar] [CrossRef] [PubMed]
- Yang, R.; Gadogbe, B.; Geiger, R.L.; Chen, D. A Compact and Accurate MOS-Based Temperature Sensor for Thermal Management. In Proceedings of the 2023 IEEE 66th International Midwest Symposium on Circuits and Systems (MWSCAS), Tempe, AZ, USA, 6–9 August 2023; pp. 594–598. [Google Scholar] [CrossRef]
- Lu, C.-Y.; Ravikumar, S.; Sali, A.D.; Eberlein, M.; Lee, H.-J. An 8b subthreshold hybrid thermal sensor with ±1.07 °C inaccuracy and single-element remote-sensing technique in 22 nm FinFET. In Proceedings of the 2018 IEEE International Solid-State Circuits Conference—(ISSCC), San Francisco, CA, USA, 11–15 February 2018; pp. 318–320. [Google Scholar] [CrossRef]
- Luria, K.; Shor, J. Miniaturized CMOS thermal sensor array for temperature gradient measurement in microprocessors. In Proceedings of the 2010 IEEE International Symposium on Circuits and Systems, Paris, France, 30 May–2 June 2010; pp. 1855–1858. [Google Scholar] [CrossRef]
- Li, X.; Li, Z.; Zhou, W.; Duan, Z. Accurate On-Chip Temperature Sensing for Multicore Processors Using Embedded Thermal Sensors. IEEE Trans. Very Large Scale Integr. (vlsi) Syst. 2020, 28, 2328–2341. [Google Scholar] [CrossRef]
- Sharifi, S.; Rosing, T.Š. Accurate Direct and Indirect On-Chip Temperature Sensing for Efficient Dynamic Thermal Management. IEEE Trans. Comput. Des. Integr. Circuits Syst. 2010, 29, 1586–1599. [Google Scholar] [CrossRef]
- Skadron, K.; Stan, M.R.; Huang, W.; Velusamy, S.; Sankaranarayanan, K.; Tarjan, D. Temperature-aware microarchitecture. In Proceedings of the 30th Annual International Symposium on Computer Architecture, San Diego, CA, USA, 9–11 June 2003; pp. 2–13. [Google Scholar] [CrossRef]
- Jiang, J.; Shu, W.; Chang, J.; Liu, J. A novel subthreshold voltage reference featuring 17 ppm/°C TC within −40 °C to 125 °C and 75 dB PSRR. In Proceedings of the 2015 IEEE International Symposium on Circuits and Systems (ISCAS), Lisbon, Portugal, 24–27 May 2015; pp. 501–504. [Google Scholar] [CrossRef]
- Mittal, R.; Kawoosa, M.; Parekhji, R.A. Systematic approach for trim test time optimization: Case study on a multi-core RF SOC. In Proceedings of the 2014 International Test Conference, Seattle, WA, USA, 23 October 2014; pp. 1–9. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Approximating Function | Equation |
|---|---|
| 1st Order | |
| 2nd Order | |
| 3rd Order | |
| 4th Order | |
| Logarithmic | |
| Exponential | |
| Power Law | |
| Power Law Original Data | |
| 3rd Order Fit using CurveFit | |
| Triode Function | |
| Saturation Function | |
| Diode |
| Device | Size |
|---|---|
| Diode NMOS | (2 µm/180 nm) |
| Diode NMOS | (5 µm/1 µm) |
| Diode PMOS | (2 µm/180 nm) |
| Diode PMOS | (5 µm/1 µm) |
| Diode–ndio_m | (10 µm/10 µm) |
| Device | Vref | Dimensions |
|---|---|---|
| Diode NMOS | 600 mV | W = 2 µm, 1.6 µm, 1.2 µm, 800 nm, 400 nm L = 180 nm |
| Diode NMOS | 550 mV and 750 mV | W = 5 µm, 2.5 µm L = 1 µm, 500 nm |
| Diode PMOS | 700 mV, 750 mV, and 800 mV | W = 2 µm, 1.6 µm, 1.2 µm, 800 nm, 400 nm L = 180 nm |
| Diode PMOS | 650 mV and 700 mV | W = 5 µm, 2.5 µm L = 1 µm, 500 nm |
| Sensing Unit | Function | INL (°C) | Current Values (µA) |
|---|---|---|---|
| NMOS W = 800 nm, L = 180 nm, Vref = 600 mV | 0.13 | 7.0–18.0 | |
| NMOS W = 5 µm, L = 1 µm, Vref = 550 mV | 3rd Order | 0.11 | 4.2–12.5 |
| PMOS W = 400 nm, L = 180 nm, Vref = 750 mV | 2nd Order | 0.02 | 4.8–9.6 |
| PMOS W = 2.5 µm, L = 1 µm, Vref = 650 mV | 3rd Order | 0.06 | 2.1–5.3 |
| 90 °C | 95 °C | 100 °C | 105 °C | 110 °C | 115 °C | 120 °C | 125 °C | |
|---|---|---|---|---|---|---|---|---|
| −40 °C | 65% | 72.25% | 77% | 84.75% | 89.5% | 87.25% | 85.75% | 84.5% |
| −35 °C | 67% | 74.25% | 79% | 85.75% | 90.75% | 89% | 87.25% | 85.75% |
| −30 °C | 69.75% | 75.5% | 81.25% | 86.25% | 91.25% | 90.5% | 88.25% | 86.5% |
| −25 °C | 72.25% | 76% | 83.25% | 87% | 86.5% | 86.25% | 86.25% | 86% |
| −20 °C | 73.5% | 78% | 82% | 81.25% | 80.5% | 80% | 79.75% | 79.25% |
| −15 °C | 74.5% | 76% | 75.75% | 75.25% | 74.75% | 74.75% | 74.5% | 74.5% |
| −10 °C | 71.25% | 72.5% | 72.25% | 72% | 72% | 72% | 72% | 72% |
| Source | Process | ) | INL (°C) | Temperature Range |
|---|---|---|---|---|
| [4] | 0.18 µm | - | 0.21 | [−20 °C 100 °C] |
| [5] | 0.18 µm | - | 1.96 | [−50 °C 110 °C] |
| [6] | 28 nm | - | 0.15 | [0 °C 100 °C] |
| [8] | 0.18 µm | 32 | 0.6 | [−20 °C 120 °C] |
| [9] | 22 nm | 210 | 1.07 | [−30 °C 120 °C] |
| This Work | 0.18 µm | 0.072 * | 0.02 ** | [−40 °C 125 °C] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Heikens, S.; Chen, D. Ultra-Small Temperature Sensing Units with Fitting Functions for Accurate Thermal Management. Metrology 2025, 5, 46. https://doi.org/10.3390/metrology5030046
Heikens S, Chen D. Ultra-Small Temperature Sensing Units with Fitting Functions for Accurate Thermal Management. Metrology. 2025; 5(3):46. https://doi.org/10.3390/metrology5030046
Chicago/Turabian StyleHeikens, Samuel, and Degang Chen. 2025. "Ultra-Small Temperature Sensing Units with Fitting Functions for Accurate Thermal Management" Metrology 5, no. 3: 46. https://doi.org/10.3390/metrology5030046
APA StyleHeikens, S., & Chen, D. (2025). Ultra-Small Temperature Sensing Units with Fitting Functions for Accurate Thermal Management. Metrology, 5(3), 46. https://doi.org/10.3390/metrology5030046