


Practical Approaches for Determining the Structural Resolution Capability of X-ray Computed Tomography Measurement Tasks

Abstract
1. Introduction
2. Materials and Methods
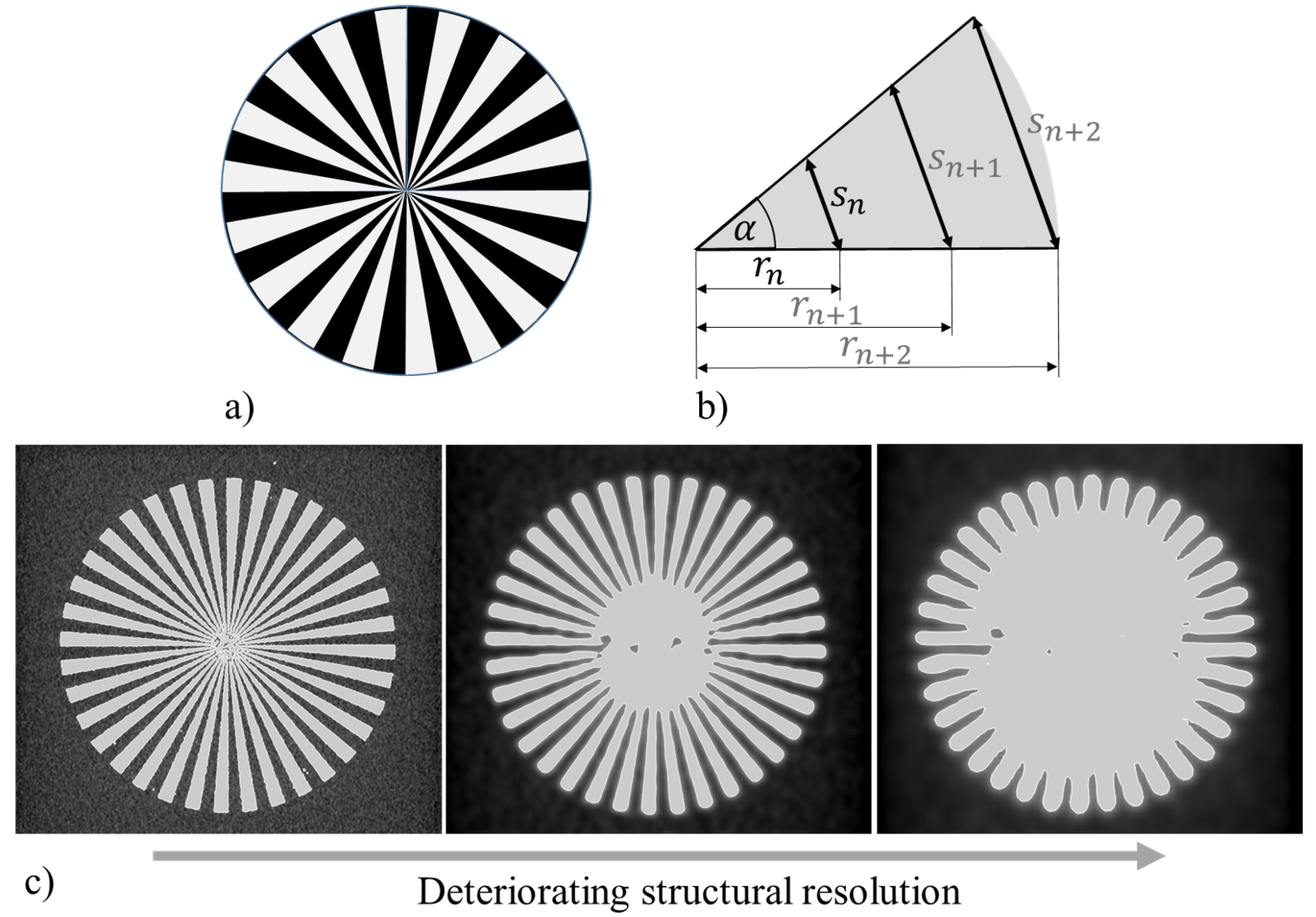
2.1. Determination Approach
2.2. Specimen and Setup
2.2.1. Specimen
2.2.2. XCT System and Settings Used
2.3. Methodologies
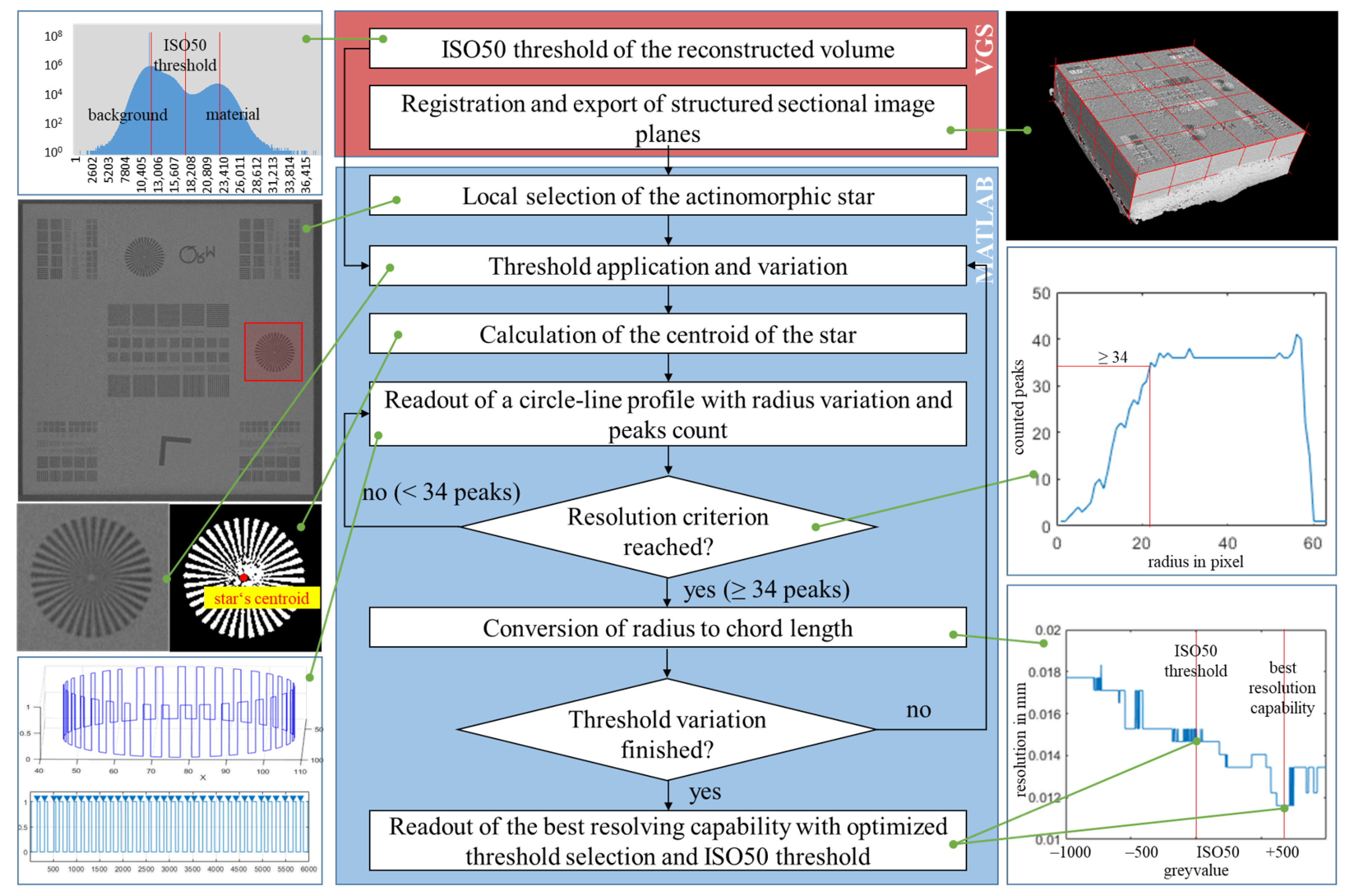
2.3.1. Method 1
2.3.2. Method 2
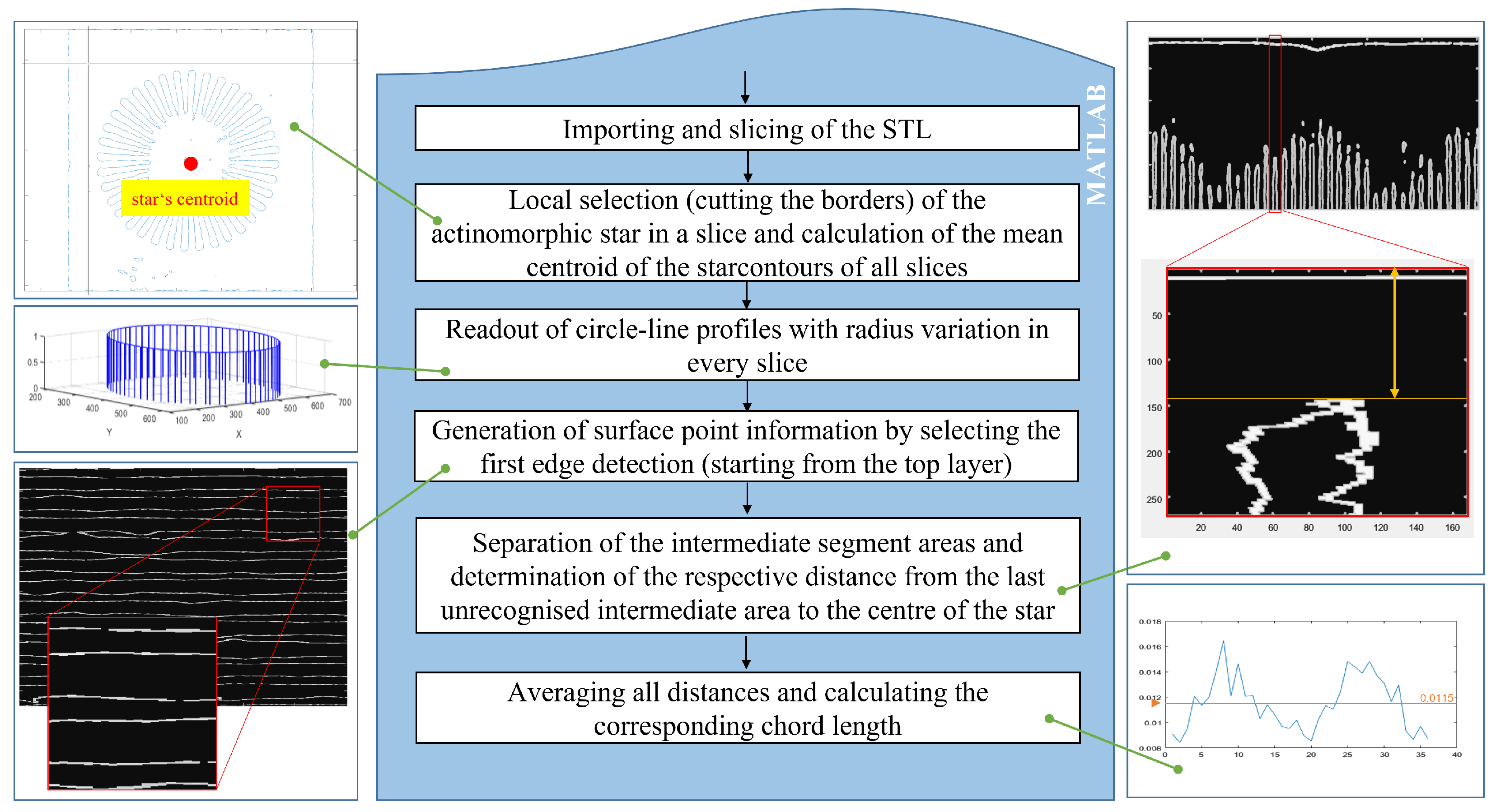
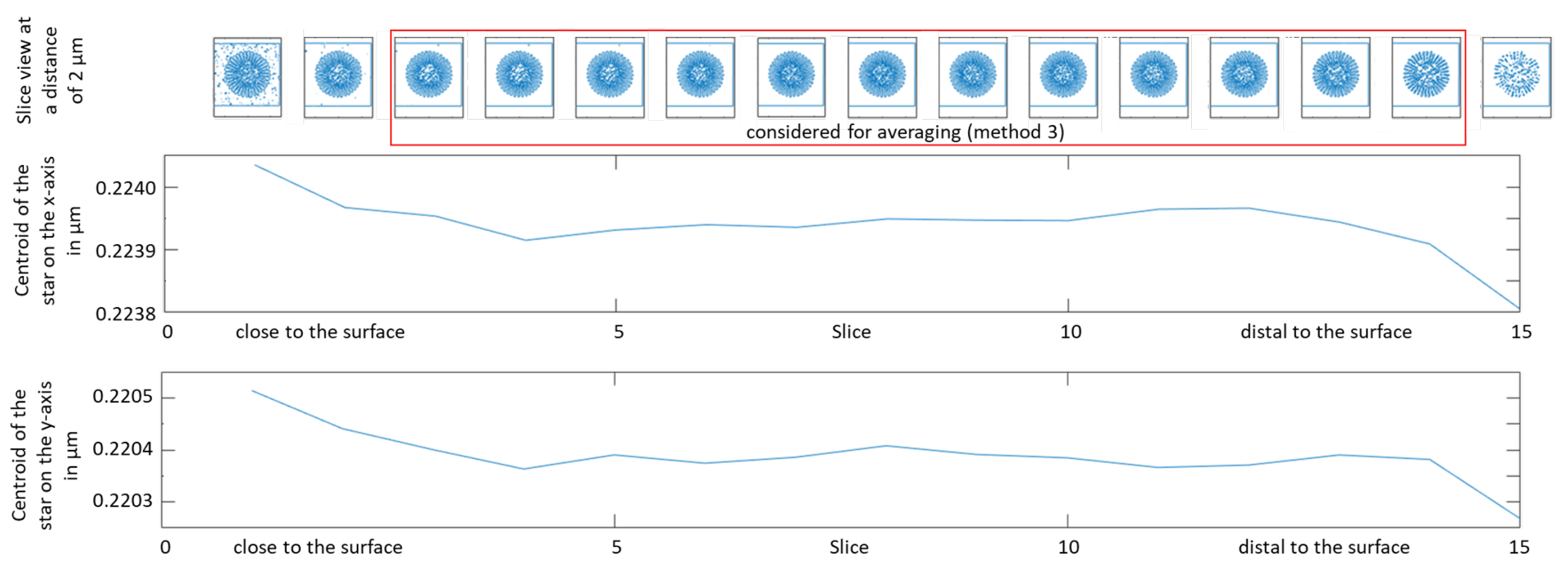
2.3.3. Method 3
3. Results
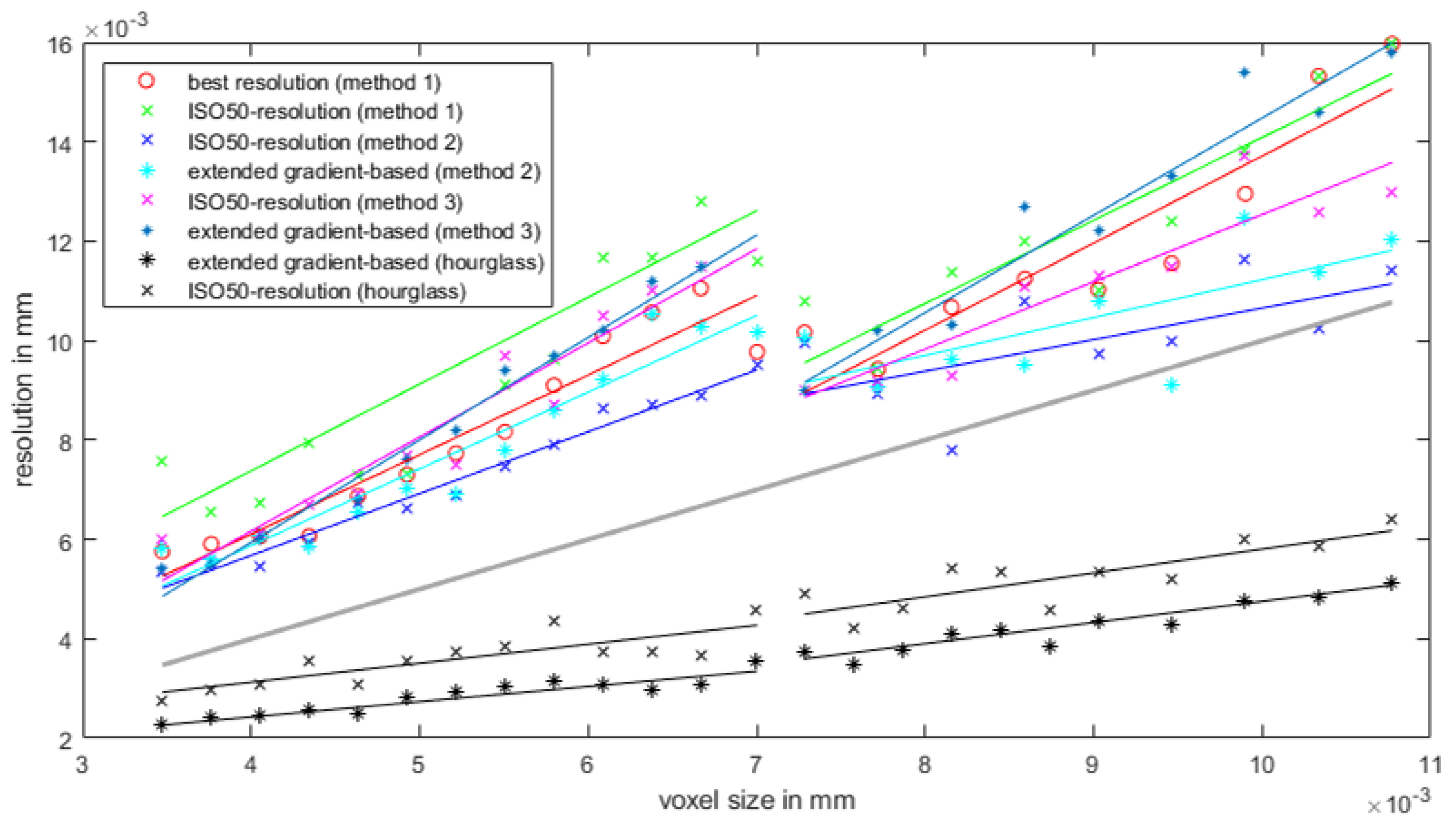
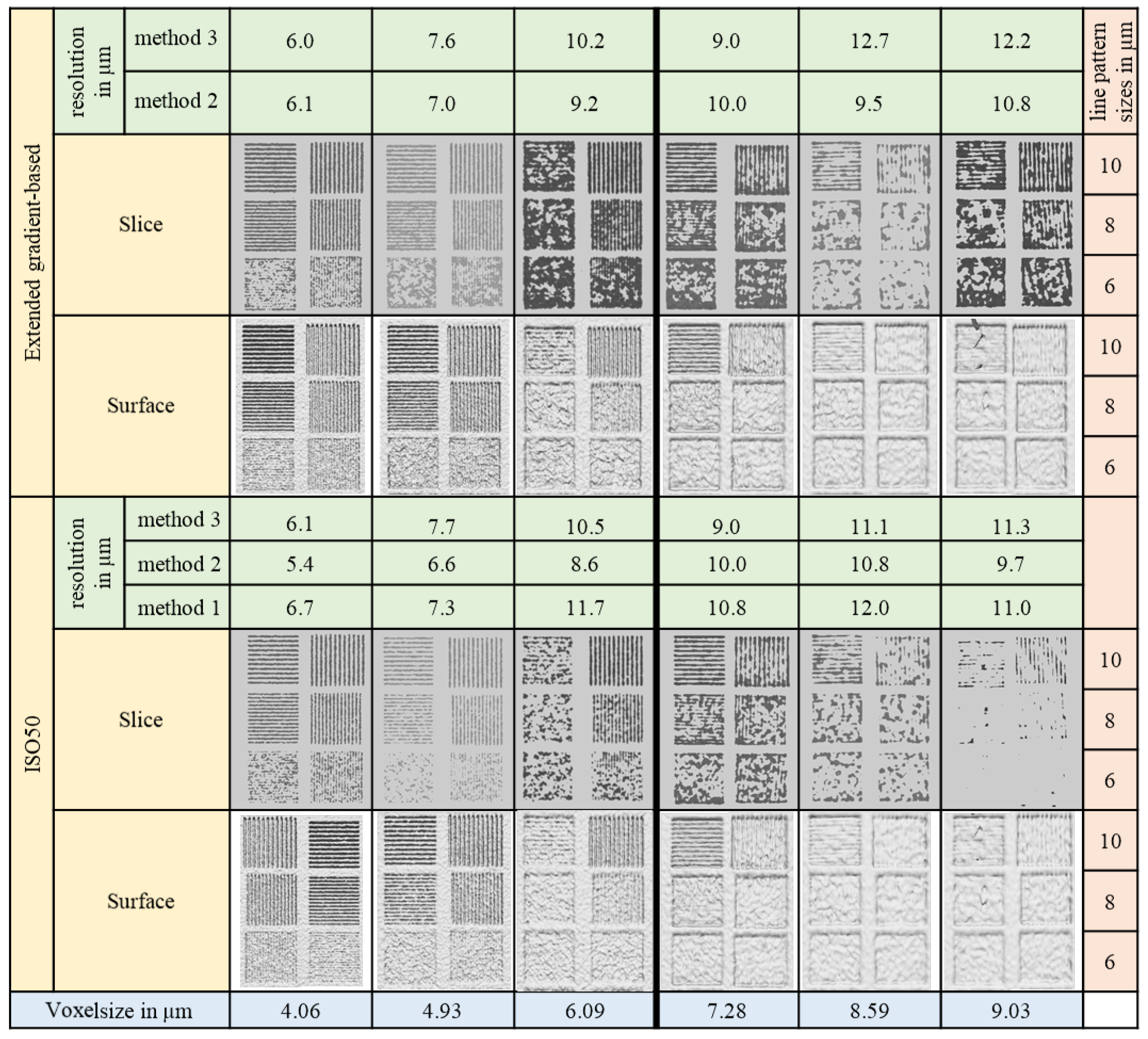
3.1. Resolution Depending on the Voxel Size
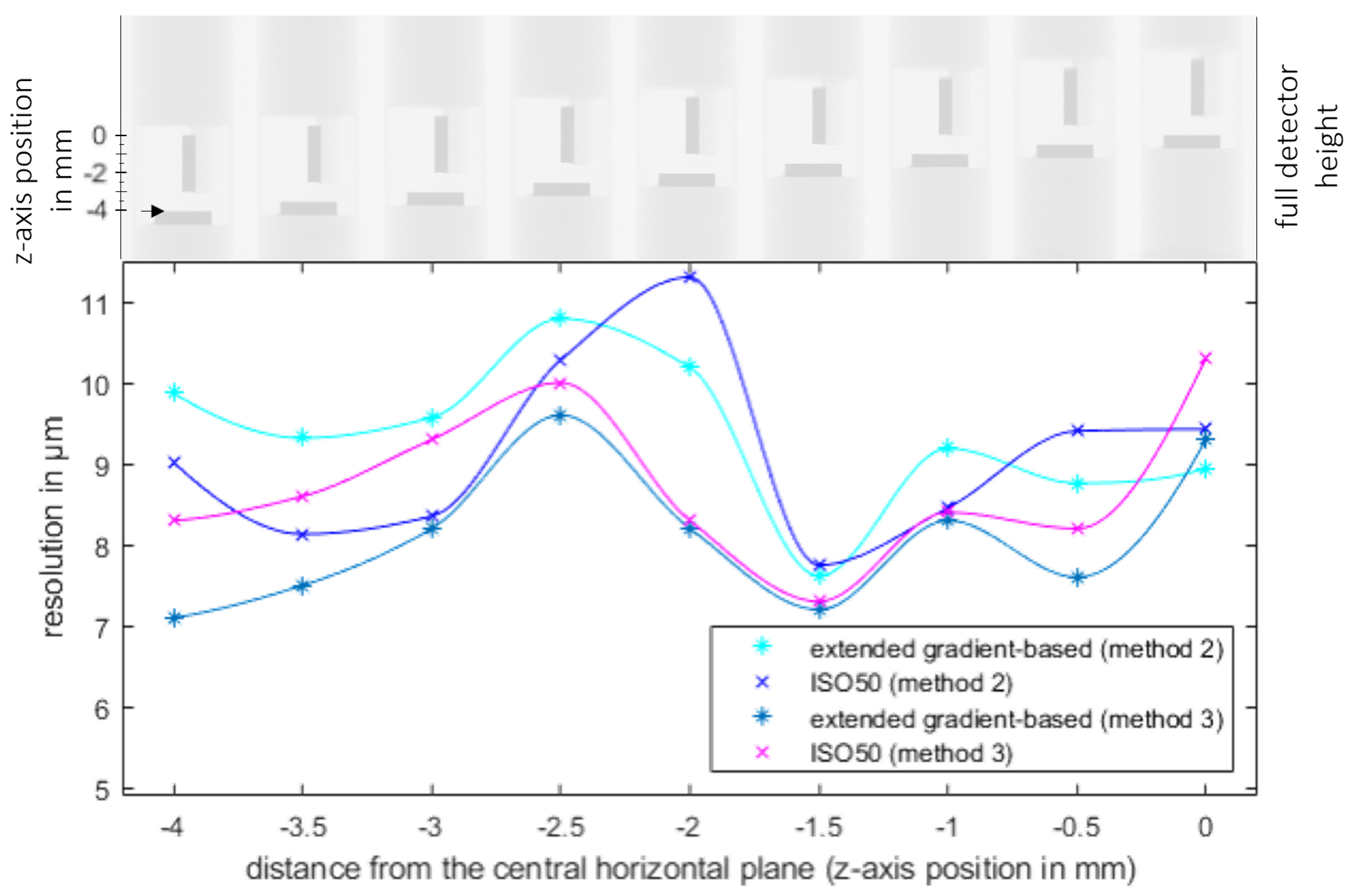
3.2. Influence of the Test Specimen Position on the Resolution Values
4. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- VDI/VDE 2617 Part 6.1:2021-11; Accuracy of Coordinate Measuring Machines, Characteristics and Their Testing, Code of Practice for the Application of DIN EN ISO 10360-7 for Coordinate Measuring Machines Equipped with Imaging Probing Systems. VDI Association of German Engineers: Düsseldorf, Germany, 2021.
- VDI/VDE 2630 Part 1.3:2011-12; Computed Tomography in Dimensional Measurement—Guideline for the Application of DIN EN ISO 10360 for Coordinate Measuring Machines with CT-Sensors. VDI Association of German Engineers: Düsseldorf, Germany, 2011.
- Bartscher, M.; Neuschaefer-Rube, U.; Illemann, J.; Borges de Oliveira, F.; Stolfi, A.; Carmignato, S. Qualification and Testing of CT Systems. In Industrial X-ray Computed Tomography; Springer International Publishing: Cham, Switzerland, 2017; pp. 185–228. [Google Scholar] [CrossRef]
- Heinzl, C.; Amirkhanov, A.; Kastner, J. Processing, Analysis and Visualization of CT Data. In Industrial X-ray Computed Tomography; Springer International Publishing: Cham, Switzerland, 2017; pp. 99–142. [Google Scholar] [CrossRef]
- Villarraga-Gómez, H.; Körner, L.; Leach, R.; Smith, S.T. Amplitude-wavelength maps for X-ray computed tomography systems. Precis. Eng. 2020, 64, 228–242. [Google Scholar] [CrossRef]
- Fleßner, M.; Vujaklija, N.; Helmecke, E.; Hausotte, T. Determination of Metrological Structural Resolution of a CT System Using the Frequency Response on Surface Structures; Technical Report; Physikalisch-Technische Bundesanstalt (PTB): Braunschweig, Germany, 2015. [Google Scholar] [CrossRef]
- Wohlgemuth, F.; Fleßner, M.; Hausotte, T. Determination of Metrological Structural Resolution using an Aperiodic Spatial Frequency Standard. In Proceedings of the International Symposium on Digital Industrial Radiology and Computed Tomography—DIR2019, Furth, Germany, 2–4 July 2019. [Google Scholar]
- Laquai, R.; Illemann, J.; Bartscher, M.; Neuschaefer-Rube, U. The metrological structural resolution for dimensional X-ray CT: Analysis of the comparability between the CEB and the PBS method. Meas. Sci. Technol. 2023, 34, 084002. [Google Scholar] [CrossRef]
- Carmignato, S.; Pierobon, A.; Rampazzo, P.; Parisatto, M.; Savio, E. CT for Industrial Metrology—Accuracy and Structural Resolution of CT Dimensional Measurements. In Proceedings of the 4th Conference on Industrial Computed Tomography (iCT), Wels, Austria, 19–21 September 2012. [Google Scholar]
- Carmignato, S.; Rampazzo, P.; Balcon, M.; Parisatto, M. Practical method for determining the metrological structure resolution of dimensional CT. In Proceedings of the 13th EUSPEN International Conference, Berlin, Germany, 27–31 May 2013. [Google Scholar]
- Dewulf, W.; Bosse, H.; Carmignato, S.; Leach, R. Advances in the metrological traceability and performance of X-ray computed tomography. CIRP Ann. 2022, 71, 693–716. [Google Scholar] [CrossRef]
- Höger, K.; Schild, L.; Weiser, L.; Lanza, G. Performance parameters for evaluating pore detection ability of computed tomography systems. In Proceedings of the 12th Conference on Industrial Computed Tomography (iCT) 2023, Fürth, Germany, 27 February–2 March 2023. [Google Scholar] [CrossRef]
- Zanini, F.; Carmignato, S. Two-spheres method for evaluating the metrological structural resolution in dimensional computed tomography. Meas. Sci. Technol. 2017, 28, 114002. [Google Scholar] [CrossRef]
- Langner, O.; Karolczak, M.; Rattmann, G.; Kalender, W.A. Bar and Point Test Patterns Generated by Dry-Etching for Measurement of High Spatial Resolution in Micro-CT. In World Congress on Medical Physics and Biomedical Engineering, 7–12 September 2009, Munich, Germany; Springer: Berlin/Heidelberg, Germany, 2009; pp. 428–431. [Google Scholar] [CrossRef]
- Hermanek, P.; Borges de Oliveira, F.; Bartscher, M.; Carmignato, S. Experimental investigation of new multi-material gap reference standard for testing computed tomography systems. In Proceedings of the 7th Conference on Industrial Computed Tomography, Leuven, Belgium, 7–9 February 2017. [Google Scholar]
- Busch, M.; Hausotte, T. Determination of the Interface Structural Resolution of an Industrial X-ray Computed Tomograph Using a Spherical Specimen and a Gap Specimen Consisting of Gauge Blocks; Trans Tech Publications, Ltd.: Zurich, Switzerland, 2021; Volume 883, pp. 41–48. [Google Scholar] [CrossRef]
- Busch, M.; Hausotte, T. Simulation-based investigation of the metrological interface structural resolution capability of X-ray computed tomography scanners. J. Sens. Sens. Syst. 2023, 12, 1–8. [Google Scholar] [CrossRef]
- Laquai, R.; Neuschaefer-Rube, U.; Bartscher, M.; Illemann, J. A critical assessment of the “improved two-spheres method” [1] for the determination of a structrural resolution for dXCT. In Proceedings of the 5th Annual Dimensional X-ray Computed Tomography Conference (dXCT), Online, 17–19 May 2021. [Google Scholar]
- MicroCT Bar Pattern NANO V2 Phantom 3 × 3 mm2 Chip; QRM GmbH: Moehrendorf, Germany. Available online: https://www.qrm.de/en/products/micro-ct-bar-pattern-phantoms?downloadfile=1701&type=3451&cHash=fb1b0c0839bd1544c51304076f0a7883 (accessed on 1 July 2024).
- Weiss, D.; Shi, Q.; Kuhn, C. Measuring the 3D resolution of a micro-focus X-ray CT setup. In Proceedings of the 4th Conference on Industrial Computed Tomography (iCT), Wels, Austria, 19–21 September 2012. [Google Scholar]
- Tan, O. Characterization of Micro- and Nanometer Resolved Technical Surfaces with Function-Oriented Parameters. Ph.D. Thesis, FAU, Erlangen, Germany, 2012. [Google Scholar]
- Thompson, A.; Rodriguez Sanchez, A.; Senin, N.; Eifler, M.; Hering, J.; Leach, R. Calibration of X-ray computed tomography for surface topography measurement using metrological characteristics. In Proceedings of the 21st International Conference of the European Society for Precision Engineering and Nanotechnology, EUSPEN 2021, Virtual, 7–10 June 2021; pp. 287–290. [Google Scholar]
- Stroud, I.; Xirouchakis, P. STL and extensions. Adv. Eng. Softw. 2000, 31, 83–95. [Google Scholar] [CrossRef]
- Borges de Oliveira, F.; Stolfi, A.; Bartscher, M.; De Chiffre, L.; Neuschaefer-Rube, U. Experimental investigation of surface determination process on multi-material components for dimensional computed tomography. Case Stud. Nondestruct. Test. Eval. 2016, 6, 93–103. [Google Scholar] [CrossRef]
- Kittler, J.; Illingworth, J. On threshold selection using clustering criteria. IEEE Trans. Syst. Man Cybern. 1985, SMC-15, 652–655. [Google Scholar] [CrossRef]
- Mustra, M.; Delac, K.; Grgic, M. Overview of the DICOM standard. In Proceedings of the 50th International Symposium ELMAR, 2008, Zadar, Croatia, 10–12 September 2008; IEEE: Piscataway, NJ, USA, 2008. [Google Scholar]
- Birch, G.C.; Griffin, J.C. Sinusoidal Siemens star spatial frequency response measurement errors due to misidentified target centers. Opt. Eng. 2015, 54, 074104. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tube voltage | 150 kV | Detector size | 20482 px |
| Tube currente | 76 µA | Pixel pitch | 200 µm |
| Focal spot size | 7 µm | Magnification | 19–53× |
| Pre-Filter | no | Voxel size | 3.47–10.34 µm |
| Integration time | 2000 ms | Projections | 2050 |
| Gain | 16× | Image averaging | 3× |
| Method | Test Series 1 | Test Series 2 |
|---|---|---|
| 1 best resolution | 0.92 | 0.85 |
| 1 ISO50 | 0.67 | 0.84 |
| 2 ISO50 | 0.98 | 0.40 |
| 2 extended gradient-based | 0.92 | 0.52 |
| 3 ISO50 | 0.91 | 0.87 |
| 3 extended gradient-based | 0.98 | 0.93 |
| hourglass ISO50 | 0.69 | 0.69 |
| hourglass gradient-based | 0.89 | 0.89 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Busch, M.; Hausotte, T. Practical Approaches for Determining the Structural Resolution Capability of X-ray Computed Tomography Measurement Tasks. Metrology 2024, 4, 457-468. https://doi.org/10.3390/metrology4030028
Busch M, Hausotte T. Practical Approaches for Determining the Structural Resolution Capability of X-ray Computed Tomography Measurement Tasks. Metrology. 2024; 4(3):457-468. https://doi.org/10.3390/metrology4030028
Chicago/Turabian StyleBusch, Matthias, and Tino Hausotte. 2024. "Practical Approaches for Determining the Structural Resolution Capability of X-ray Computed Tomography Measurement Tasks" Metrology 4, no. 3: 457-468. https://doi.org/10.3390/metrology4030028
APA StyleBusch, M., & Hausotte, T. (2024). Practical Approaches for Determining the Structural Resolution Capability of X-ray Computed Tomography Measurement Tasks. Metrology, 4(3), 457-468. https://doi.org/10.3390/metrology4030028