
Driving Behaviour and Usability: Should In-Vehicle Speed Limit Warnings Be Paired with Overhead Gantry?



Abstract
1. Introduction
2. Method
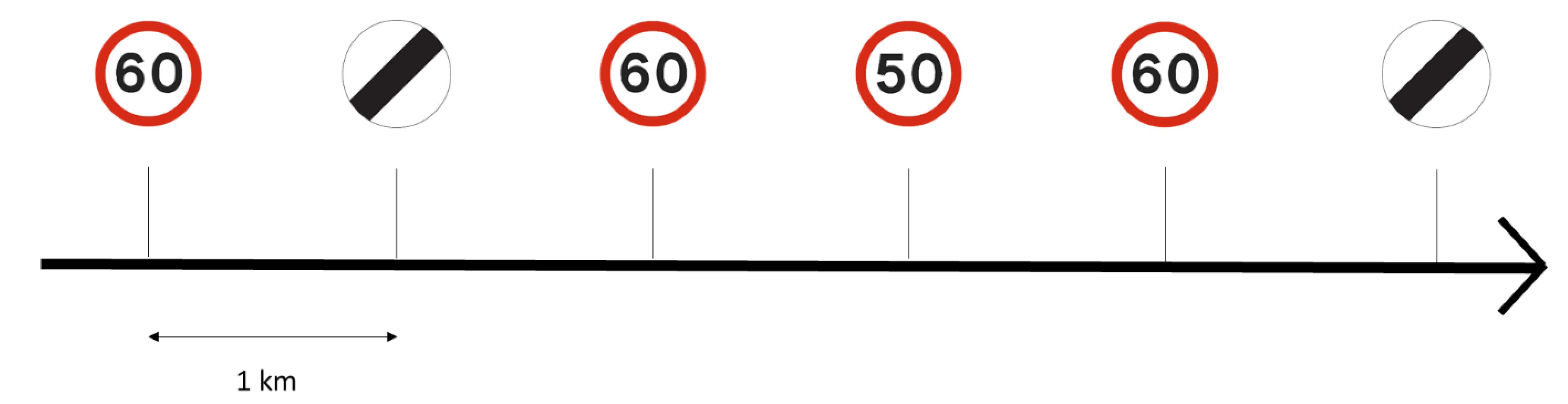
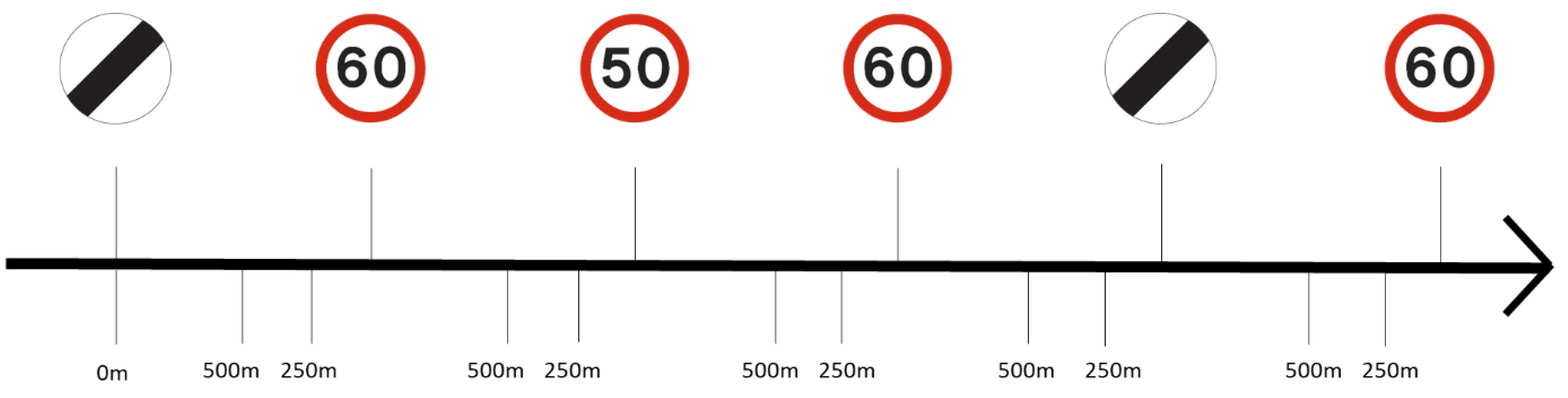
2.1. Experimental Design
2.2. Procedure
2.3. Participants
2.4. Simulator Equipment
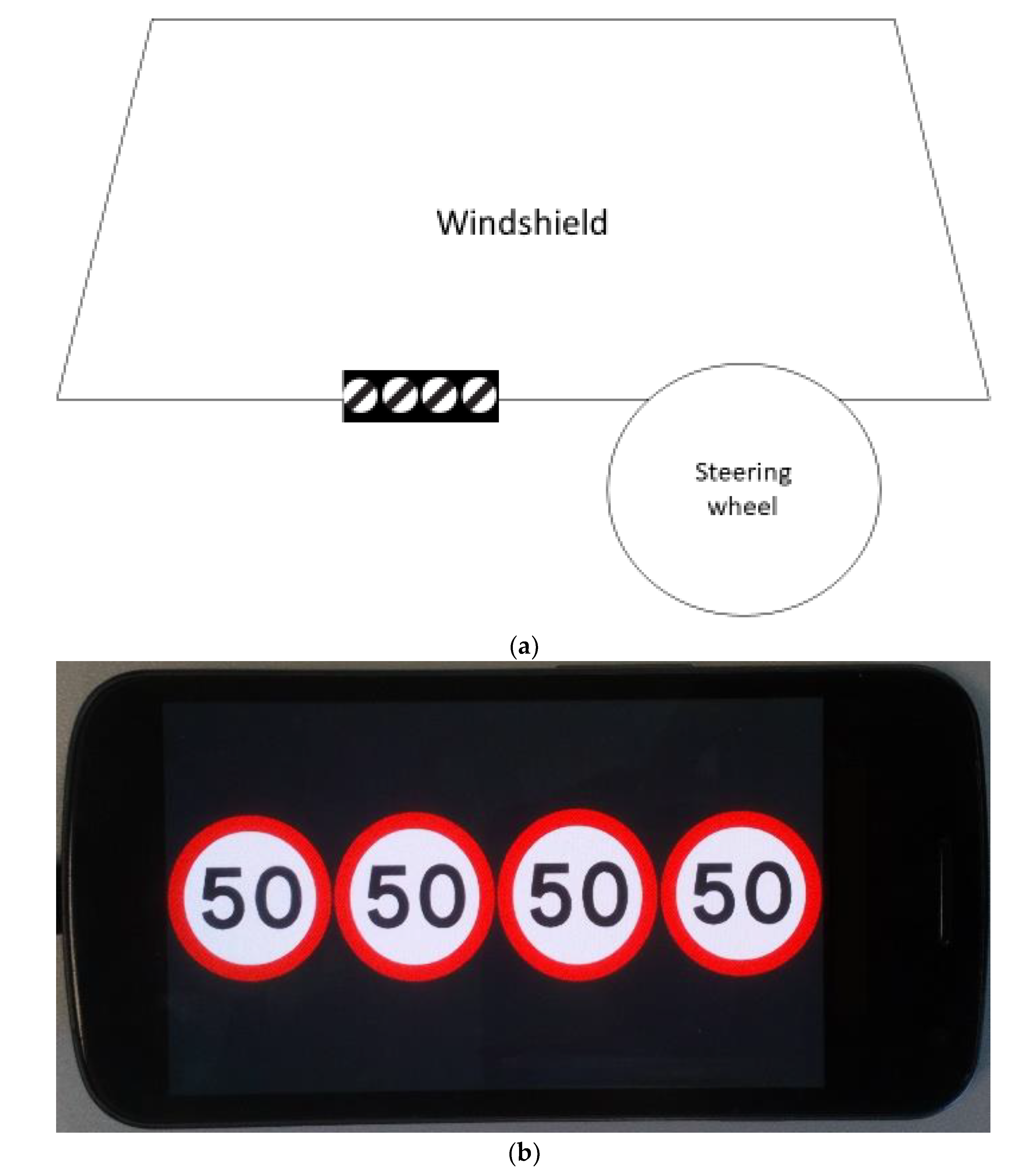
2.5. Human–Machine Interface
3. Measures
3.1. Questionnaire
- -
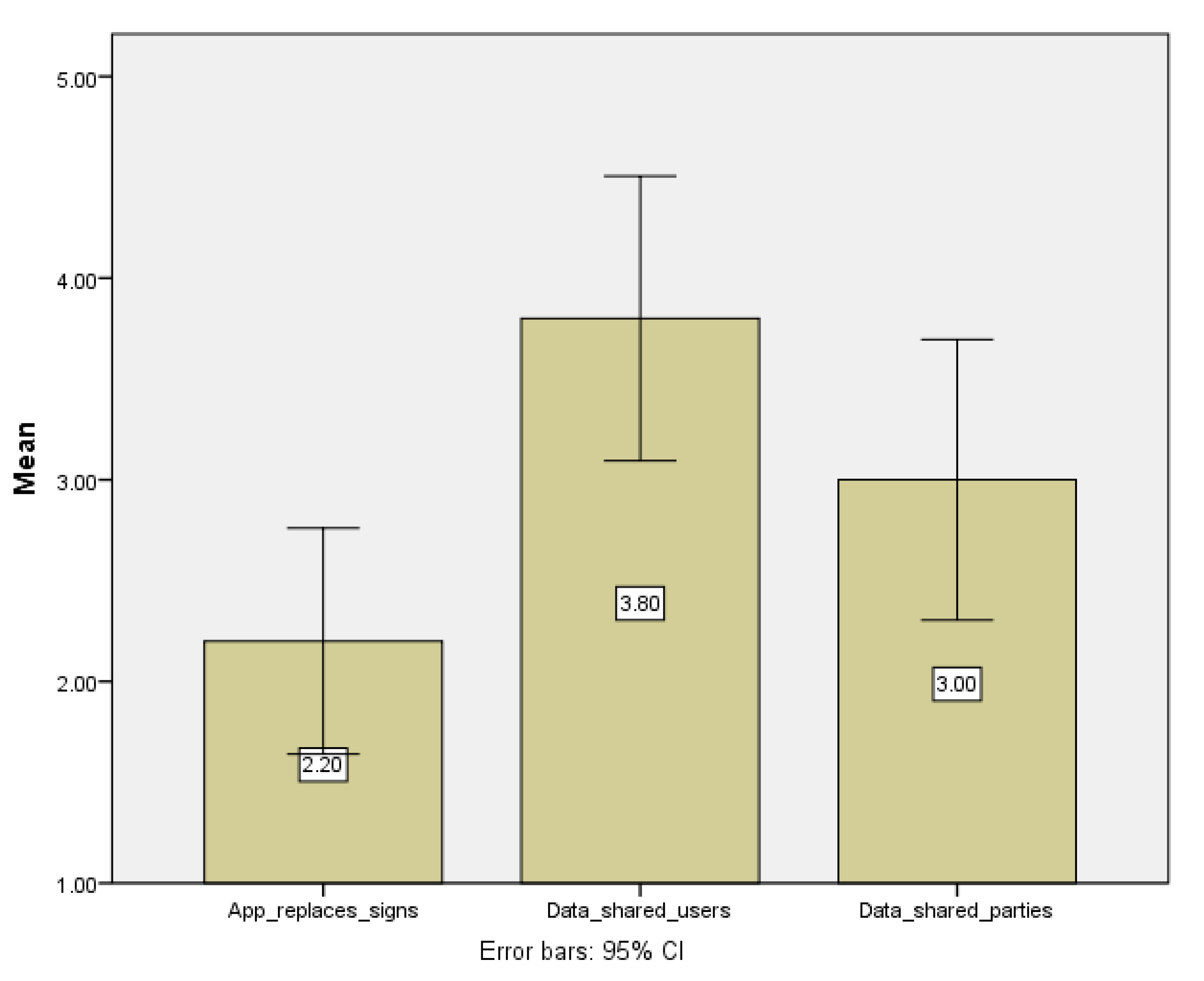
- I would mind if using an app that replaces the gantry and road signs every time I drive was mandatory,
- -
- I would be happy if an app replaces the gantry and road signs,
- -
- I would be happy if the driving-related data collected by my car was shared with other road users,
- -
- I would be happy if the driving-related data collected by my car was shared with other parties (app and vehicle manufacturers, local transport authorities, traffic management).
- -
- The warnings’ location in the vehicle was appropriate;
- -
- I would like to be told what the warnings mean before seeing them while driving;
- -
- I had enough time to see the warnings on the mobile phone;
- -
- I had been distracted by these warnings;
- -
- I found the signs were congruent with what happened on the road.
3.2. Driving Behaviour
4. Results
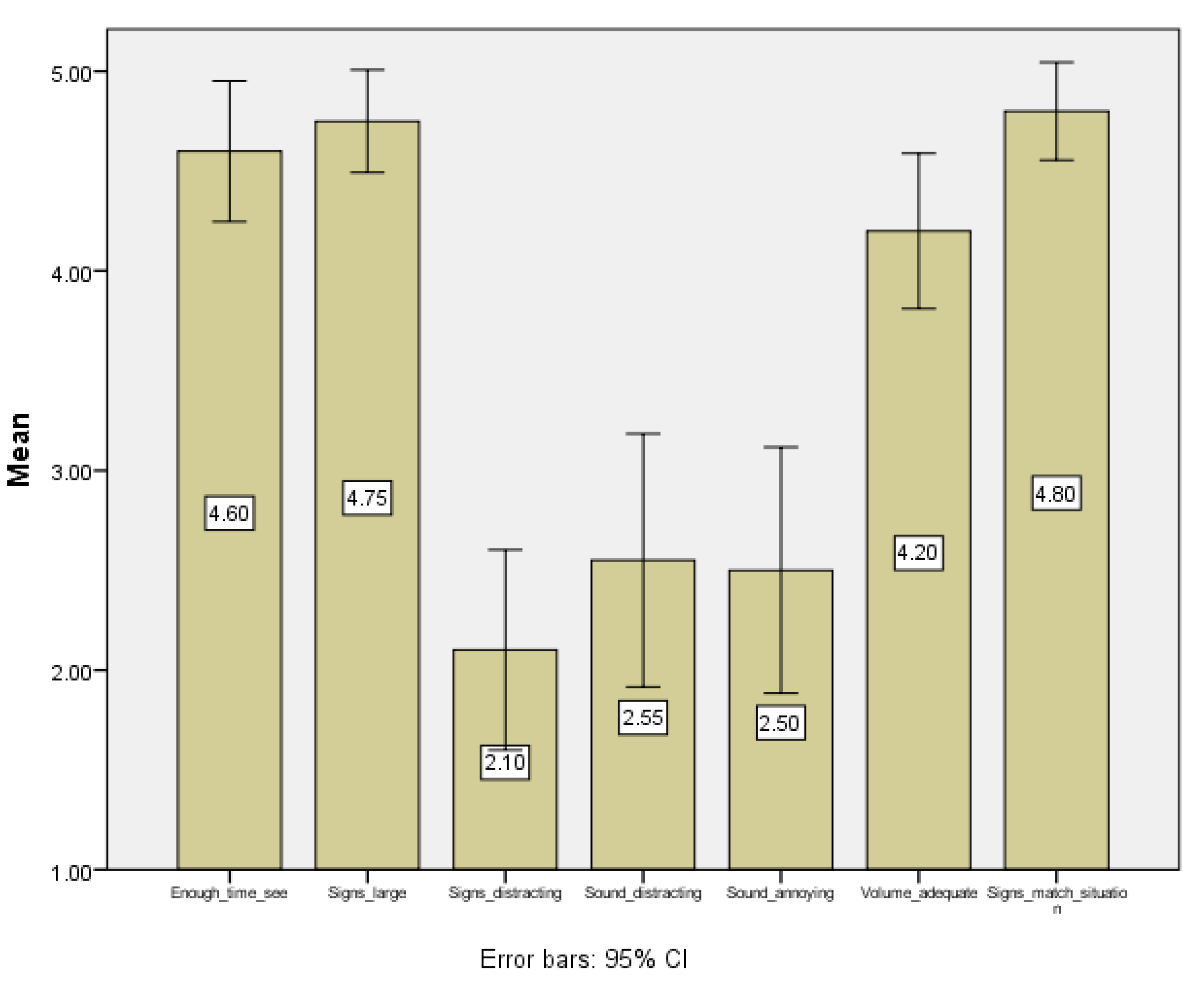
4.1. Usability and Data-Sharing
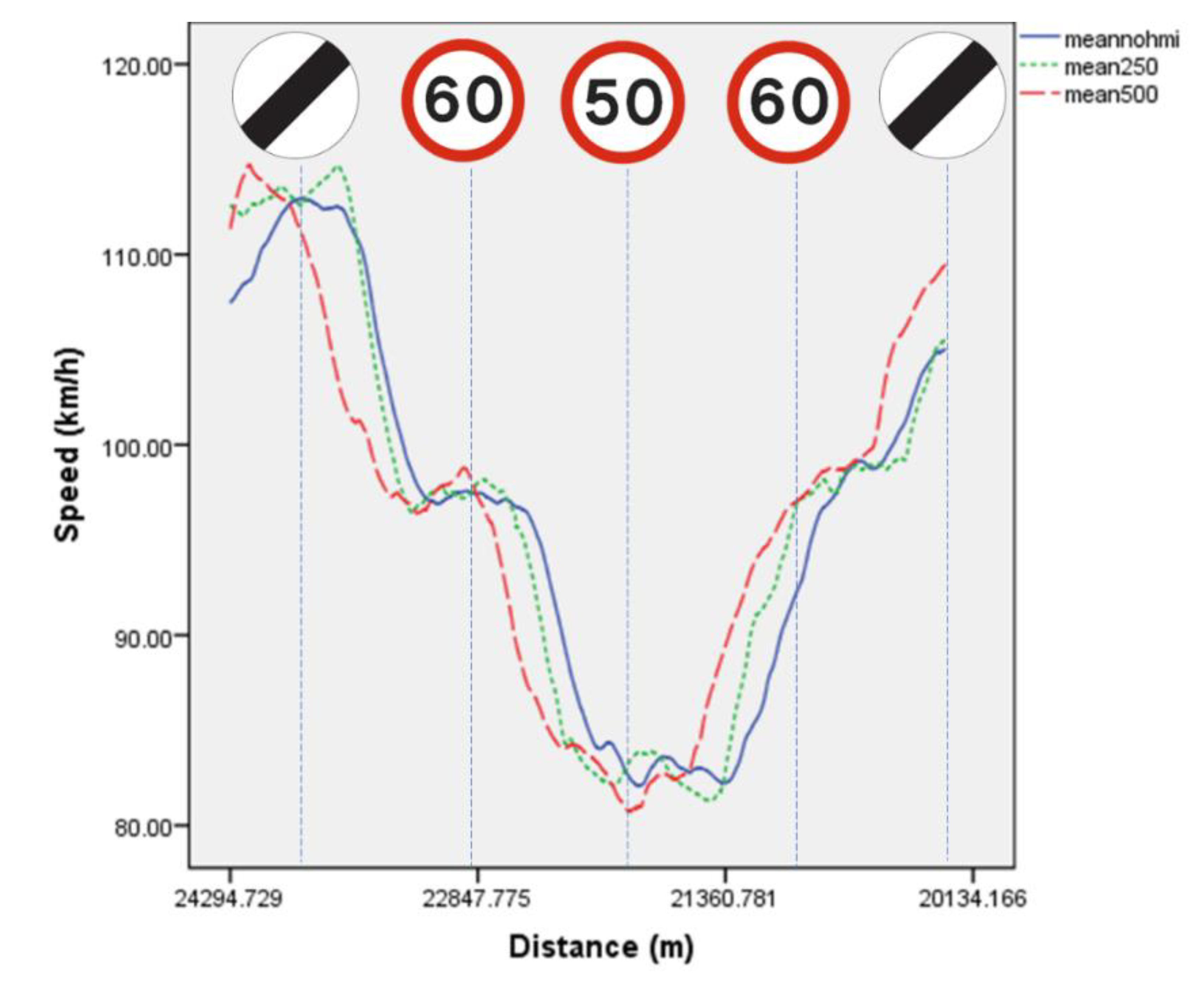
4.2. Speed Plots
4.3. Mean Speed Measured for 250 m and 500 m
4.3.1. Baseline Condition: noHMI
4.3.2. Experimental Conditions: HMI
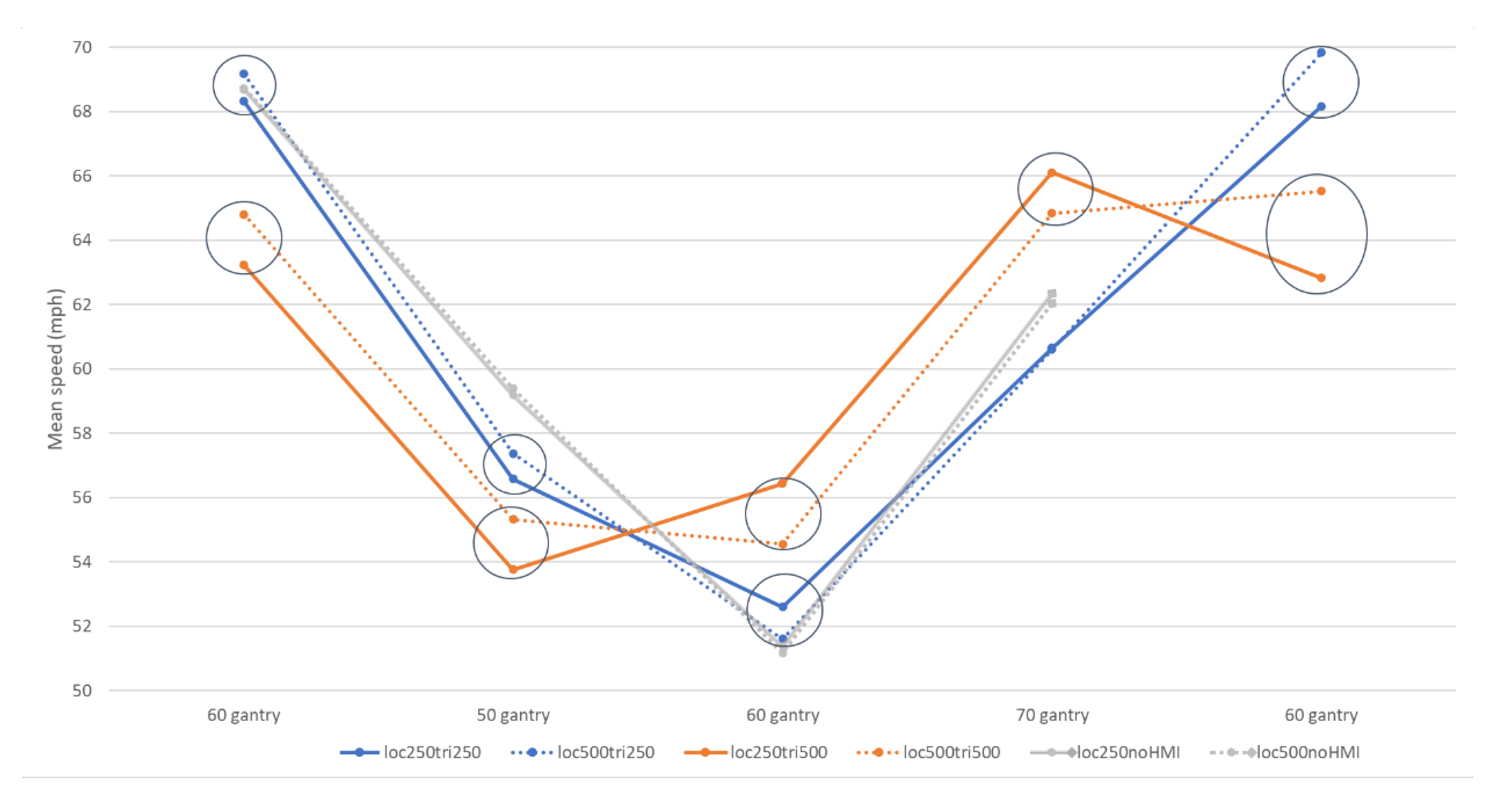
4.4. Speed at Gantry
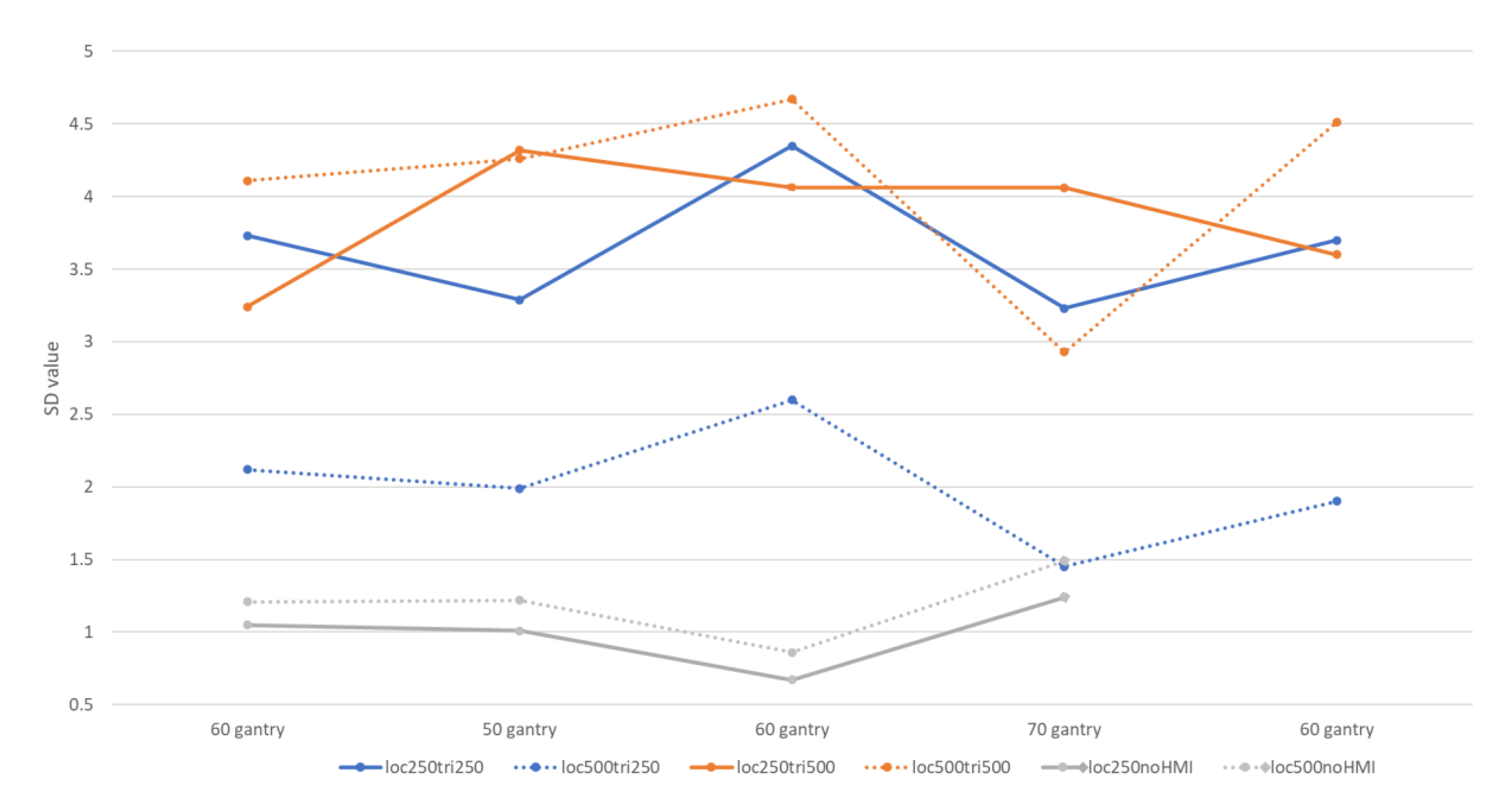
4.5. Speed Homogeneity
4.5.1. Baseline Condition: noHMI
4.5.2. Experimental Conditions: HMI
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Van Nes, N.; Brandenburg, S.; Twisk, D. Improving homogeneity by dynamic speed limit systems. Accid. Anal. Prev. 2010, 42, 944–952. [Google Scholar] [CrossRef] [PubMed]
- Hoogendoorn, R.; Harms, I.; Hoogendoorn, S.; Brookhuis, K. Dynamic maximum speed limits: Perception, mental workload, and compliance. Transp. Res. Rec. J. Transp. Res. Board 2012, 2321, 46–54. [Google Scholar] [CrossRef]
- Chang, C.-Y.; Li, C.-C. Visual and operational impacts of variable speed limit signs on bus drivers on freeways using driving simulator. In Proceedings of the 3rd IEEE Asia-Pacific Services Computing Conference (APSCC 2008), Yilan, Taiwan, 9–12 December 2008; pp. 1453–1458. [Google Scholar] [CrossRef]
- Harms, I.M.; Brookhuis, K.A. Dynamic traffic management on a familiar road: Failing to detect changes in variable speed limits. Transp. Res. Part F Traffic Psychol. Behav. 2016, 38, 37–46. [Google Scholar] [CrossRef]
- Lee, C.; Abdel-Aty, M. Testing effects of warning messages and variable speed limits on driver behavior using driving simulator. Transp. Res. Rec. 2008, 2069, 55–64. [Google Scholar] [CrossRef]
- Hellinga, B.; Mandelzys, M. Impact of driver compliance on the safety and operational impacts of freeway variable speed limit systems. J. Transp. Eng. 2011, 137, 260–268. [Google Scholar] [CrossRef]
- Lehtonen, E.; Malhotra, N.; Starkey, N.J.; Charlton, S.G. Speedometer monitoring when driving with a speed warning system. Eur. Transp. Res. Rev. 2020, 12, 16. [Google Scholar] [CrossRef]
- Jamson, S. Would those who need ISA, use it? Investigating the relationship between drivers’ speed choice and their use of a voluntary ISA system. Transp. Res. Part F Traffic Psychol. Behav. 2006, 9, 195–206. [Google Scholar] [CrossRef]
- Lai, F.; Carsten, O. What benefit does Intelligent Speed Adaptation deliver: A close examination of its effect on vehicle speeds. Accid. Anal. Prev. 2012, 48, 4–9. [Google Scholar] [CrossRef] [PubMed]
- Whitmire, J., II; Morgan, J.F.; Oron-Gilad, T.; Hancock, P.A. The effect of in-vehicle warning systems on speed compliance in work zones. Transp. Res. Part F Traffic Psychol. Behav. 2011, 14, 331–340. [Google Scholar] [CrossRef]
- Endsley, M.R. Toward a theory of situation awareness in dynamic systems. Hum. Factors J. Hum. Factors Ergon. Soc. 1995, 37, 32–64. [Google Scholar] [CrossRef]
- Highways Agency. Highways Agency Policy for the Use of Variable Signs and Signals (VSS) Devices. Interim Advice Note 162/12. 2012. Available online: http://www.standardsforhighways.co.uk/ha/standards/ghost/ians/pdfs/ian162.pdf (accessed on 7 July 2022).
- Highways England. Traffic Signs Manual Chapter 1 Introduction; 2018; Crown: London, UK; ISBN 9780115536014. Available online: https://assets.publishing.service.gov.uk/government/uploads/system/uploads/attachment_data/file/771873/traffic-signs-manual-chapter-1.pdf (accessed on 7 July 2022).
- ISO/TS 16951:2004; Road Vehicles—Ergonomic Aspects of Transport Information and Control Systems (TICS)—Procedures for Determining Priority of on-board Messages Presented to Drivers. International Organization for Standardization: Geneva, Switzerland, 2004.
- Jerome, C.; Monk, C.; Campbell, J. Driver Vehicle Interface Design Assistance for Vehicle-to-Vehicle Technology Applications. In Proceedings of the 24th International Technical Conference on the Enhanced Safety of Vehicles (ESV), Gothenburg, Sweden, 8–11 June 2015. No. 15–0452. [Google Scholar]
- Brooke, J. Sus: A ‘quick and dirty’ usability scale. Usability Eval. Ind. 1996, 189, 4–7. [Google Scholar]
- Van der Laan, J.D.; Heino, A.; De Waard, D. A simple procedure for the assessment of acceptance of advanced transport telematics. Transp. Res. Part C Emerg. Technol. 1997, 5, 1–10. [Google Scholar] [CrossRef]
- Bangor, A.; Kortum, P.; Miller, J. Determining what individual SUS scores mean: Adding an adjective rating scale. J. Usability Stud. 2009, 4, 114–123. [Google Scholar]
- Speiran, J.; Shakshuki, E. Emergency Electronic Brake Lights for the Smartphone VANET. Procedia Comput. Sci. 2022, 203, 51–60. [Google Scholar] [CrossRef]
- Starkey, N.J.; Charlton, S.G.; Malhotra, N.; Lehtonen, E. Drivers’ response to speed warnings provided by a smart phone app. Transp. Res. Part C Emerg. Technol. 2020, 110, 209–221. [Google Scholar] [CrossRef]
- Ali, Y.; Sharma, A.; Haque, M.M.; Zheng, Z.; Saifuzzaman, M. The impact of the connected environment on driving behavior and safety: A driving simulator study. Accid. Anal. Prev. 2020, 144, 105643. [Google Scholar] [CrossRef] [PubMed]
- Warner, H.W.; Åberg, L. The long-term effects of an ISA speed-warning device on drivers’ speeding behaviour. Transp. Res. Part F Traffic Psychol. Behav. 2008, 11, 96–107. [Google Scholar] [CrossRef]
- Orne, M.T. Demand characteristics and the concept of quasi-controls. In Artifacts in Behavioral Research: Robert Rosenthal and Ralph L. Rosnow’s Classic Books; Oxford University Press: Oxford, UK, 2009; Volume 110, pp. 110–137. [Google Scholar]
- Silvano, A.P. Impacts of Speed Limits and Information Systems on Speed Choice from a Safety Perspective. Doctoral dissertation, KTH Royal Institute of Technology, Stockholm, Sweden, 2013. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Within Subjects Factor | ||
|---|---|---|
| No HMI | ||
| HMI | ||
| Between subjects factor | trig250 m (10) | trig500 m (10) |
| Gantry | F | df | p Value | ηp2 | Distance to Gantry Measurement | Mean * | SD * |
|---|---|---|---|---|---|---|---|
| 70 mph (113 km/h) | 2.95 | 1, 19 | 0.10 | 0.13 | 250 m | 99.83 | 6.80 |
| 500 m | 99.16 | 6.36 | |||||
| 60 mph (97 km/h) | 0.75 | 1, 19 | 0.75 | 0.01 | 250 m | 110.52 | 4.89 |
| 500 m | 110.61 | 4.51 | |||||
| 50 mph (80 km/h) | 0.97 | 1, 19 | 0.34 | 0.05 | 250 m | 95.23 | 3.62 |
| 500 m | 95.56 | 3.72 | |||||
| 60 mph (97 km/h) | 1.78 | 1, 19 | 0.20 | 0.09 | 250 m | 82.65 | 5.06 |
| 500 m | 82.33 | 4.86 | |||||
| 70 mph (113 km/h) | 1.70 | 1, 19 | 0.21 | 0.08 | 250 m | 100.33 | 6.06 |
| 500 m | 99.83 | 5.73 |
| Gantry | Distance to Gantry Measurement | F | df | p Value | ηp2 | XP Condition | Mean * | SD * |
|---|---|---|---|---|---|---|---|---|
| 70 mph (113 km/h) | 250 m | 0.02 | 1, 18 | 0.883 | 0.00 | trig250 m | 99.59 | 8.12 |
| trig500 m | 100.07 | 5.61 | ||||||
| 500 m | 0.00 | 1, 18 | 0.974 | 0.00 | trig250 m | 99.12 | 7.71 | |
| trig500 m | 99.21 | 5.09 | ||||||
| 60 mph (97 km/h) | 250 m | 3.81 | 1, 18 | 0.067 | 0.18 | trig250 m | 108.52 | 5.59 |
| trig500 m | 112.52 | 3.23 | ||||||
| 500 m | 3.98 | 1, 18 | 0.061 | 0.18 | trig250 m | 108.74 | 5.37 | |
| trig500 m | 112.52 | 2.52 | ||||||
| 50 mph (80 km/h) | 250 m | 2.20 | 1, 18 | 0.156 | 0.11 | trig250 m | 94.07 | 4.79 |
| trig500 m | 96.39 | 1.32 | ||||||
| 500 m | 2.98 | 1, 18 | 0.102 | 0.14 | trig250 m | 94.19 | 4.68 | |
| trig500 m | 96.93 | 1.79 | ||||||
| 60 mph (97 km/h) | 250 m | 0.04 | 1, 18 | 0.841 | 0.00 | trig250 m | 82.42 | 5.54 |
| trig500 m | 82.89 | 4.82 | ||||||
| 500 m | 0.02 | 1, 18 | 0.895 | 0.00 | trig250 m | 82.48 | 5.93 | |
| trig500 m | 82.18 | 3.83 | ||||||
| 70 mph (113 km/h) | 250 m | 0.55 | 1, 18 | 0.469 | 0.03 | trig250 m | 101.34 | 6.25 |
| trig500 m | 99.32 | 6.01 | ||||||
| 500 m | 0.08 | 1, 18 | 0.778 | 0.01 | trig250 m | 100.20 | 6.43 | |
| trig500 m | 99.44 | 5.25 |
| Gantry | XP Condition | F | df | p Value | ηp2 | Distance to Gantry Measurement | Mean * | SD * |
|---|---|---|---|---|---|---|---|---|
| 60 mph (97 km/h) | trig250 m | 26.51 | 1, 9 | 0.001 | 0.75 | 250 m | 109.93 | 3.46 |
| 500 m | 101.31 | 3.04 | ||||||
| trig500 m | 23.56 | 1, 9 | 0.001 | 0.72 | 250 m | 101.74 | 5.77 | |
| 500 m | 104.28 | 5.33 | ||||||
| 50 mph (80 km/h) | trig250 m | 2.04 | 1, 9 | 0.187 | 0.19 | 250 m | 91.04 | 4.48 |
| 500 m | 91.04 | 4.48 | ||||||
| trig500 m | 19.11 | 1, 9 | 0.002 | 0.68 | 250 m | 86.51 | 4.58 | |
| 500 m | 89.03 | 3.27 | ||||||
| 60 mph (97 km/h) | trig250 m | 12.74 | 1, 9 | 0.006 | 0.59 | 250 m | 84.65 | 3.49 |
| 500 m | 83.04 | 3.10 | ||||||
| trig500 m | 13.97 | 1, 9 | 0.005 | 0.61 | 250 m | 90.82 | 5.80 | |
| 500 m | 87.78 | 5.00 | ||||||
| 70 mph (113 km/h) | trig250 m | 0.003 | 1, 9 | 0.956 | 0.00 | 250 m | 97.60 | 5.82 |
| 500 m | 97.54 | 6.22 | ||||||
| trig500 m | 9.25 | 1, 9 | 0.014 | 0.51 | 250 m | 106.37 | 7.70 | |
| 500 m | 104.32 | 6.69 | ||||||
| 60 mph (97 km/h) | trig250 m | 39.94 | 1, 9 | 0.000 | 0.82 | 250 m | 109.68 | 3.71 |
| 500 m | 112.38 | 2.98 | ||||||
| trig500 m | 45.36 | 1, 9 | 0.000 | 0.83 | 250 m | 101.10 | 5.19 | |
| 500 m | 105.44 | 5.02 |
| Gantry | XP Condition | F | df | p Value | ηp2 | Distance to Gantry Measurement | Mean * | SD * |
|---|---|---|---|---|---|---|---|---|
| 60 mph (97 km/h) | trig250 m | 14.8 | 1, 18 | 0.001 | 0.45 | 250 m | 109.93 | 3.46 |
| 500 m | 101.74 | 5.77 | ||||||
| trig500 m | 13.11 | 1, 18 | 0.002 | 0.42 | 250 m | 111.31 | 3.04 | |
| 500 m | 104.28 | 5.33 | ||||||
| 50 mph (80 km/h) | trig250 m | 5.0 | 1, 18 | 0.038 | 0.22 | 250 m | 91.04 | 4.48 |
| 500 m | 86.51 | 4.58 | ||||||
| trig500 m | 6.16 | 1, 18 | 0.023 | 0.26 | 250 m | 92.33 | 2.64 | |
| 500 m | 89.03 | 3.27 | ||||||
| 60 mph (97 km/h) | trig250 m | 8.29 | 1, 18 | 0.010 | 0.32 | 250 m | 84.65 | 3.49 |
| 500 m | 90.82 | 5.80 | ||||||
| trig500 m | 6.51 | 1, 18 | 0.020 | 0.27 | 250 m | 83.04 | 3.10 | |
| 500 m | 87.78 | 5.00 | ||||||
| 70 mph (113 km/h) | trig250 m | 8.26 | 1, 18 | 0.010 | 0.32 | 250 m | 97.60 | 5.82 |
| 500 m | 106.37 | 7.70 | ||||||
| trig500 m | 5.52 | 1, 18 | 0.030 | 0.24 | 250 m | 97.54 | 6.22 | |
| 500 m | 104.32 | 6.69 | ||||||
| 60 mph (97 km/h) | trig250 m | 18.10 | 1, 18 | 0.000 | 0.50 | 250 m | 109.68 | 3.71 |
| 500 m | 101.10 | 5.19 | ||||||
| trig500 m | 14.12 | 1, 18 | 0.001 | 0.44 | 250 m | 112.38 | 2.98 | |
| 500 m | 105.44 | 5.02 |
| Gantry | Distance to Gantry Measurement | F | df | p Value | ηp2 | XP Condition | Mean * | SD * |
|---|---|---|---|---|---|---|---|---|
| 60 mph (97 km/h) | 250 m | 0.838 | 1, 9 | 0.384 | 0.09 | noHMI | 108.53 | 5.60 |
| trig250 m | 109.93 | 3.46 | ||||||
| 500 m | 32.95 | 1, 9 | 0.136 | 0.23 | noHMI | 108.74 | 5.37 | |
| trig250 m | 111.31 | 3.04 | ||||||
| 50 mph (80 km/h) | 250 m | 2.87 | 1, 9 | 0.124 | 0.24 | noHMI | 94.07 | 4.79 |
| trig250 m | 91.04 | 4.48 | ||||||
| 500 m | 1.21 | 1, 9 | 0.299 | 0.12 | noHMI | 94.20 | 4.68 | |
| trig250 m | 92.33 | 2.64 | ||||||
| 60 mph (97 km/h) | 250 m | 1.41 | 1, 9 | 0.264 | 0.14 | noHMI | 82.42 | 5.54 |
| trig250 m | 84.65 | 3.49 | ||||||
| 500 m | 0.11 | 1, 9 | 0.751 | 0.01 | noHMI | 82.49 | 5.93 | |
| trig250 m | 83.04 | 3.10 | ||||||
| 70 mph (113 km/h) | 250 m | 1.83 | 1, 9 | 0.203 | 0.17 | noHMI | 101.35 | 6.25 |
| trig250 m | 97.60 | 5.82 | ||||||
| 500 m | 0.65 | 1, 9 | 0.442 | 0.07 | noHMI | 100.20 | 6.43 | |
| trig250 m | 97.53 | 6.22 |
| Gantry | Distance to Gantry Measurement | F | df | p Value | ηp2 | XP Condition | Mean * | SD * |
|---|---|---|---|---|---|---|---|---|
| 60 mph (97 km/h) | 250 m | 32.62 | 1, 9 | 0.000 | 0.78 | noHMI | 112.52 | 3.24 |
| trig500 m | 101.74 | 5.77 | ||||||
| 500 m | 18.85 | 1, 9 | 0.002 | 0.68 | noHMI | 112.49 | 2.53 | |
| trig500 m | 104.28 | 5.33 | ||||||
| 50 mph (80 km/h) | 250 m | 49.99 | 1, 9 | 0.000 | 0.85 | noHMI | 96.40 | 1.32 |
| trig500 m | 86.51 | 4.58 | ||||||
| 500 m | 48.41 | 1, 9 | 0.000 | 0.84 | noHMI | 96.93 | 1.79 | |
| trig500 m | 89.03 | 3.27 | ||||||
| 60 mph (97 km/h) | 250 m | 18.82 | 1, 9 | 0.002 | 0.68 | noHMI | 82.90 | 4.82 |
| trig500 m | 90.82 | 5.79 | ||||||
| 500 m | 25.64 | 1, 9 | 0.001 | 0.74 | noHMI | 82.19 | 3.83 | |
| trig500 m | 87.78 | 4.99 | ||||||
| 70 mph (113 km/h) | 250 m | 10.13 | 1, 9 | 0.011 | 0.53 | noHMI | 99.32 | 6.01 |
| trig500 m | 106.37 | 7.70 | ||||||
| 500 m | 8.35 | 1, 9 | 0.018 | 0.48 | noHMI | 99.45 | 5.26 | |
| trig500 m | 104.32 | 6.69 |
| Gantry | F | df | p Value | ηp2 | XP Condition | Mean * | SD * |
|---|---|---|---|---|---|---|---|
| 60 mph (97 km/h) | 11.66 | 1, 18 | 0.003 | 0.39 | trig250 m | 103.27 | 5.09 |
| trig500 m | 96.69 | 3.34 | |||||
| 50 mph (80 km/h) | 5.36 | 1, 18 | 0.033 | 0.23 | trig250 m | 90.40 | 10.11 |
| trig500 m | 82.33 | 4.41 | |||||
| 60 mph (97 km/h) | 10.84 | 1, 18 | 0.004 | 0.38 | trig250 m | 87.75 | 4.55 |
| trig500 m | 95.17 | 5.50 | |||||
| 70 mph (113 km/h) | 9.87 | 1, 18 | 0.006 | 0.35 | trig250 m | 97.77 | 5.04 |
| trig500 m | 106.90 | 8.47 | |||||
| 60 mph (97 km/h) | 7.39 | 1, 18 | 0.14 | 0.29 | trig250 m | 105.43 | 6.50 |
| trig500 m | 98.66 | 4.44 |
| Gantry | HMI trigger Distance to Gantry | F | df | p Value | ηp2 | XP Condition | Mean * | SD * |
|---|---|---|---|---|---|---|---|---|
| 60 mph (97 km/h) | 250 m | 12.09 | 1, 9 | 0.007 | 0.57 | noHMI | 113.37 | 6.84 |
| trig250 m | 103.27 | 5.09 | ||||||
| 500 m | 395.02 | 1, 9 | 0.000 | 0.98 | noHMI | 114.81 | 2.26 | |
| trig500 m | 96.70 | 3.34 | ||||||
| 50 mph (80 km/h) | 250 m | 3.24 | 1, 9 | 0.105 | 0.26 | noHMI | 96.39 | 5.65 |
| trig250 m | 90.4 | 10.10 | ||||||
| 500 m | 70.38 | 1, 9 | 0.000 | 0.89 | noHMI | 99.71 | 3.61 | |
| trig500 m | 82.33 | 4.41 | ||||||
| 60 mph (97 km/h) | 250 m | 69.42 | 1, 9 | 0.000 | 0.89 | noHMI | 99.65 | 2.41 |
| trig250 m | 87.74 | 4.55 | ||||||
| 500 m | 32.96 | 1, 9 | 0.000 | 0.79 | noHMI | 104.61 | 2.25 | |
| trig500 m | 95.17 | 5.50 | ||||||
| 70 mph (113 km/h) | 250 m | 17.64 | 1, 9 | 0.002 | 0.66 | noHMI | 104.82 | 3.30 |
| trig250 m | 97.11 | 5.04 | ||||||
| 500 m | 1.29 | 1, 9 | 0.289 | 0.12 | noHMI | 104.49 | 5.50 | |
| trig500 m | 106.90 | 8.47 |
| Gantry | F | df | p Value | ηp2 | Distance to Gantry Measurement | Mean * | SD * |
|---|---|---|---|---|---|---|---|
| 70 mph (113 km/h) | 2.25 | 1, 19 | 0.15 | 0.11 | 250 m | 2.68 | 1.39 |
| 500 m | 2.99 | 1.45 | |||||
| 60 mph (97 km/h) | 1.01 | 1, 19 | 0.33 | 0.05 | 250 m | 1.69 | 0.82 |
| 500 m | 1.95 | 0.73 | |||||
| 50 mph (80 km/h) | 2.16 | 1, 19 | 0.16 | 0.10 | 250 m | 1.63 | 0.73 |
| 500 m | 1.96 | 0.70 | |||||
| 60 mph (97 km/h) | 1.53 | 1, 19 | 0.23 | 0.07 | 250 m | 1.07 | 0.79 |
| 500 m | 1.38 | 1.18 | |||||
| 70 mph (113 km/h) | 1.85 | 1, 19 | 0.19 | 0.09 | 250 m | 1.99 | 1.27 |
| 500 m | 2.39 | 1.36 |
| Gantry | Distance to Gantry Measurement | F | df | p Value | ηp2 | XP Condition | Mean * | SD * |
|---|---|---|---|---|---|---|---|---|
| 70 mph (113 km/h) | 250 m | 0.33 | 1, 18 | 0.574 | 0.02 | trig250 m | 2.86 | 1.53 |
| trig500 m | 2.50 | 1.30 | ||||||
| 500 m | 0.26 | 1, 18 | 0.615 | 0.01 | trig250 m | 3.17 | 1.81 | |
| trig500 m | 2.83 | 1.03 | ||||||
| 60 mph (97 km/h) | 250 m | 0.01 | 1, 18 | 0.913 | 0.00 | trig250 m | 1.67 | 0.77 |
| trig500 m | 1.71 | 0.92 | ||||||
| 500 m | 1.69 | 1, 18 | 0.211 | 0.09 | trig250 m | 2.16 | 0.84 | |
| trig500 m | 1.74 | 0.57 | ||||||
| 50 mph (80 km/h) | 250 m | 0.17 | 1, 18 | 0.687 | 0.01 | trig250 m | 1.70 | 0.91 |
| trig500 m | 1.57 | 0.54 | ||||||
| 500 m | .03 | 1, 18 | 0.862 | 0.00 | trig250 m | 1.93 | 0.32 | |
| trig500 m | 1.99 | 0.97 | ||||||
| 60 mph (97 km/h) | 250 m | 1.42 | 1, 18 | 0.250 | 0.07 | trig250 m | 1.28 | 0.88 |
| trig500 m | 0.86 | 0.68 | ||||||
| 500 m | 0.30 | 1, 18 | 0.594 | 0.02 | trig250 m | 1.53 | 1.25 | |
| trig500 m | 1.24 | 1.14 | ||||||
| 70 mph (113 km/h) | 250 m | 0.88 | 1, 18 | 0.360 | 0.05 | trig250 m | 2.25 | 1.30 |
| trig500 m | 1.72 | 1.26 | ||||||
| t500 m | .17 | 1, 18 | 0.690 | 0.01 | trig250 m | 2.52 | 1.65 | |
| trig500 m | 2.26 | 1.06 |
| Gantry | XP Condition | F | df | p Value | ηp2 | Distance to Gantry Measurement | Mean * | SD * |
|---|---|---|---|---|---|---|---|---|
| 60 mph (97 km/h) | trig250 m | 12.33 | 1, 18 | 0.002 | 0.41 | 250 m | 3.73 | 1.10 |
| 500 m | 2.12 | 0.93 | ||||||
| trig500 m | 3.77 | 1, 18 | 0.081 | 0.16 | 250 m | 3.24 | 0.95 | |
| 500 m | 4.11 | 1.14 | ||||||
| 50 mph (80 km/h) | trig250 m | 8.51 | 1, 18 | 0.004 | 0.36 | 250 m | 3.29 | 1.04 |
| 500 m | 1.99 | 0.71 | ||||||
| trig500 m | 0.02 | 1, 18 | 0.923 | 0.00 | 250 m | 4.32 | 1.50 | |
| 500 m | 4.26 | 1.48 | ||||||
| 60 mph (97 km/h) | trig250 m | 15.21 | 1, 18 | 0.025 | 0.25 | 250 m | 4.35 | 1.97 |
| 500 m | 2.60 | 1.10 | ||||||
| trig500 m | 1.88 | 1, 18 | 0.51 | 0.02 | 250 m | 4.06 | 1.63 | |
| 500 m | 4.67 | 2.38 | ||||||
| 70 mph (113 km/h) | trig250 m | 15.86 | 1, 18 | 0.007 | 0.34 | 250 m | 3.23 | 1.58 |
| 500 m | 1.45 | 0.98 | ||||||
| trig500 m | 6.33 | 1, 18 | 0.196 | 0.09 | 250 m | 4.06 | 1.88 | |
| 500 m | 2.93 | 1.86 | ||||||
| 60 mph (97 km/h) | trig250 m | 16.13 | 1, 18 | 0.018 | 0.28 | 250 m | 3.70 | 1.87 |
| 500 m | 1.90 | 1.11 | ||||||
| trig500 m | 4.15 | 1, 18 | 0.333 | 0.05 | 250 m | 3.60 | 1.83 | |
| 500 m | 4.51 | 2.24 |
| Gantry | Distance to Gantry Measurement | F | df | p Value | ηp2 | XP Condition | Mean SD Score * |
|---|---|---|---|---|---|---|---|
| 60 mph (97 km/h) | 250 m | 34.58 | 1, 9 | 0.000 | 0.79 | noHMI | 1.67 |
| trig250 m | 3.73 | ||||||
| 500 m | 29.18 | 1, 9 | 0.000 | 0.76 | noHMI | 1.74 | |
| trig250 m | 4.11 | ||||||
| 50 mph (80 km/h) | 250 m | 11.77 | 1, 9 | 0.008 | 0.57 | noHMI | 1.70 |
| trig250 m | 3.29 | ||||||
| 500 m | 22.17 | 1, 9 | 0.001 | 0.71 | noHMI | 1.93 | |
| trig250 m | 4.32 | ||||||
| 60 mph (97 km/h) | 250 m | 27.13 | 1, 9 | 0.001 | 0.75 | noHMI | 1.28 |
| trig250 m | 4.35 | ||||||
| 500 m | 31.90 | 1, 9 | 0.005 | 0.61 | noHMI | 1.53 | |
| trig250 m | 4.06 | ||||||
| 70 mph (113 km/h) | 250 m | 2.01 | 1, 9 | 0.19 | 0.18 | noHMI | 2.25 |
| trig250 m | 3.23 | ||||||
| 500 m | 3.24 | 1, 9 | 0.11 | 0.27 | noHMI | 2.52 | |
| trig250 m | 4.06 |
| Gantry | Distance to Gantry Measurement | F | df | p Value | ηp2 | XP Condition | Mean SD Score * |
|---|---|---|---|---|---|---|---|
| 60 mph (97 km/h) | 250 m | 0.83 | 1, 9 | 0.387 | 0.08 | noHMI | 1.72 |
| trig500 m | 2.12 | ||||||
| 500 m | 29.18 | 1, 9 | 0.000 | 0.76 | noHMI | 1.74 | |
| trig500 m | 4.11 | ||||||
| 50 mph (80 km/h) | 250 m | 2.43 | 1, 9 | 0.153 | 0.21 | noHMI | 1.57 |
| trig500 m | 1.99 | ||||||
| 500 m | 16.13 | 1, 9 | 0.003 | 0.64 | noHMI | 1.99 | |
| trig500 m | 4.26 | ||||||
| 60 mph (97 km/h) | 250 m | 12.17 | 1, 9 | 0.007 | 0.58 | noHMI | 0.86 |
| trig500 m | 2.60 | ||||||
| 500 m | 10.26 | 1, 9 | 0.011 | 0.53 | noHMI | 1.24 | |
| trig500 m | 4.67 | ||||||
| 70 mph (113 km/h) | 250 m | 0.26 | 1, 9 | 0.622 | 0.03 | noHMI | 1.71 |
| trig500 m | 1.45 | ||||||
| 500 m | 0.71 | 1, 9 | 0.419 | 0.07 | noHMI | 2.27 | |
| trig500 m | 2.93 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Payre, W.; Diels, C. Driving Behaviour and Usability: Should In-Vehicle Speed Limit Warnings Be Paired with Overhead Gantry? Future Transp. 2023, 3, 1-22. https://doi.org/10.3390/futuretransp3010001
Payre W, Diels C. Driving Behaviour and Usability: Should In-Vehicle Speed Limit Warnings Be Paired with Overhead Gantry? Future Transportation. 2023; 3(1):1-22. https://doi.org/10.3390/futuretransp3010001
Chicago/Turabian StylePayre, William, and Cyriel Diels. 2023. "Driving Behaviour and Usability: Should In-Vehicle Speed Limit Warnings Be Paired with Overhead Gantry?" Future Transportation 3, no. 1: 1-22. https://doi.org/10.3390/futuretransp3010001
APA StylePayre, W., & Diels, C. (2023). Driving Behaviour and Usability: Should In-Vehicle Speed Limit Warnings Be Paired with Overhead Gantry? Future Transportation, 3(1), 1-22. https://doi.org/10.3390/futuretransp3010001