3.1. Monitoring from Earth
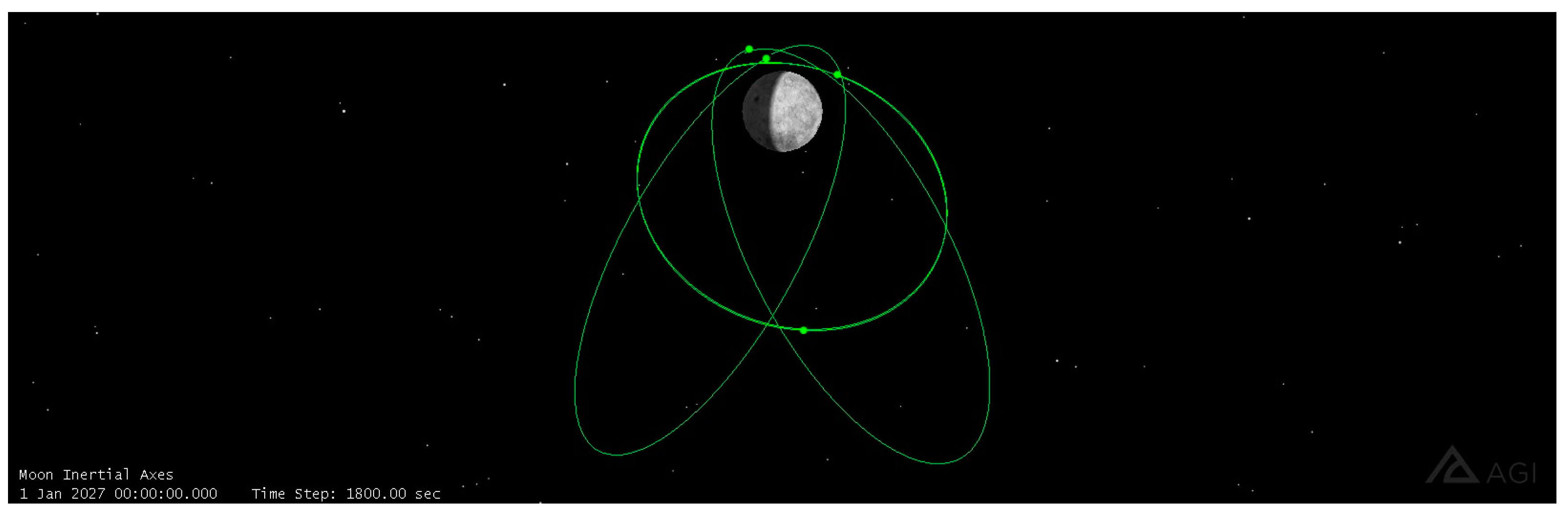
A “chain” object has been created on STK: this embedded function will compute the accesses from a satellite S-band navigation signal to the ground segment, activating the constraint that the access is active when at least one site field-of-view (i.e., S-band receiver on Earth) is in visibility of the signal. This operation has been repeated for the four satellites.
The results for the aforementioned year of simulation has been reported in the following table (
Table 1) and in the following figure (
Figure 2).
The two percentages in brackets in the second column are the apportionment of the main percentage (i.e., per satellite, year fraction of cumulative visibility of its S-band signal from at least one ground site) between visibility from exactly one site and visibility from exactly two sites at the same time, also reflected in “(1 site)” duration in the fourth column as the maximum duration of an interval for which the signal is visible from just one site.
From a daily point of view, which can be considered as more fitting for operation scheduling and the repeatability of the monitored products, the reception of each of the four signals is guaranteed every day from a minimum of half an hour to a maximum of almost the entire day, with overall (i.e., in an absolute sense, not daily) continuous visibility of an S-band signal for a maximum of 20/21 h. It has to be specified that this is an aggregated time, divided into a number of individual daily windows from one to four. Moreover, the disposition of these windows during each day drift along the year, with overall data gaps of almost 24 h.
For redundancy and RAMS purposes, the analysis results related to visibility from just one site are interesting: this condition occurs for half of the visibility epochs, with windows that can last up to almost 8 h. The high reliability of the ground facilities and/or a sufficient number of antennas per site must be guaranteed.
Visibility of the signal as a standalone is not sufficient for a proper monitoring: the RF power level at the ground site antenna must be high enough to decode the embedded data. For each satellite-to-site link (a total of 12 links), the RF-received power level (from now on, PoG for ground assets and PoS for space assets) has been computed with the following mathematical relation (1):
with the EIRP extrapolated from the radiation pattern as a function of the azimuth (Az) and elevation (El) of the ground site/space asset as seen from the satellite antenna and path losses (PL) as a sum of the Free Space Loss (function of satellite-to-site/satellite slant range and frequency) and atmospheric losses, computed by STK with embedded models. Two thresholds of −199 dBW and −189 dBW have been set for availability computation [
9], whose results have been collected in the following table (
Table 2).
The cases with the −189 dBW threshold are not applicable because the maximum absolute values (i.e., the best case for each of the satellite) are between −190.4 dBW and −190.9 dBW.
Assuming that the correct reception and interpretation of the signal occurs when the −199 dBW power level is reached or overcome, the combination of
Table 3’s availability information and
Table 2’s visibility information translates into guaranteed daily monitoring of at least one hour per day but interrupted, within the single windows, by gaps because of the low received RF power level. The entity and the related impact of these power drops on the quality of the monitoring must be investigated.
It is here remarked that thresholds have been proposed in the mentioned references for the links from MEO to the Moon and for space-borne receivers to be equipped on board lunar missions. In this paper, they have been considered applicable for the opposite direction: despite the additional atmospheric contribution that arises from the receivers being on the Earth surface and the possible interferences given by other systems, the typical high antenna G/T of ground sites used for space communications has been considered as a highly compensative effect.
An analysis on the site workload in terms of signal reception has been carried out and summarized in the following table (
Table 3).
For the main part of the time for which an antenna is receiving S-band signals, it is just one satellite, and almost never three or four of them at the same time. On the other hand, for more than half of the time over one year, each site is not active at all.
3.2. Cross-Monitoring
The limitations of the monitoring from Earth are high Free Space Losses due to slant ranges of up to 400 thousands km, atmospheric losses and stringent visibility constraints due to the relative motion between the Earth and the Moon, combined with the Earth’s rotation and ELFO satellites’ orbital motion. In the following section, the possibility for the ELFO satellites themselves to directly receive S-band signals from other elements of the constellation is considered and its effects analyzed.
3.2.1. Case 1: Always Rx + Tx
The first case considers the simultaneous transmission and reception capability for each satellite. This means that, from a scenario point of view, both sides are not constrained in time and access is granted every time the receiving asset is in view of the transmitting asset field-of-view. An omnidirectional receiver is assumed (i.e., no constraint on the direction of the signal).
In the following table (
Table 4), the visibility of each satellite S-band signal from at least one of the other satellites is reported.
As expected from the constellation geometry, every performance indicator has highly improved: total time of visibility, redundancy, daily availability, continuity, gaps.
From the point of view of the receivers’ workload, there is always at least one S-band signal in view (except the ELFO 4 receiver, for which it is 99.37% over one year) and there are even windows for which all of them (3) are visible. The availability of reception of three S-band signals and Position Dilution Of Precision (PDOP) availability of the receiver have been computed and reported in the following table (
Table 5).
The possibility of in-orbit or post-processing PVT (on the assumption that just three satellites are needed because the “user” performing the PVT is a satellite of the same constellation and the same clock is assumed) must be investigated, with some windows’ length being favorable for the convergence of a standard algorithm. Anyway, the geometry issues (PDOP availability around 80% when considering 10 as a threshold value) and signal-in-space error (SISE) of the constellation satellites [
10] must be tackled.
The RF power levels reached at the receiving satellites and the availability with respect to the thresholds have been computed using (1) (
Table 6).
Table 7 shows another main advantage of this technique: the much higher RF power level due to the reduced link losses (one order of magnitude lower slant ranges and no atmospheric losses). In addition, the receiving assets are aligned towards transmitting assets boresight for most of the time, resulting in higher EIRP in the link budgets.
3.2.2. Case 2: Rx or Tx
Despite the clear advantages of the “always Rx + Tx” scenario, there is also a clear disadvantage of reception and transmission in the same frequency, which introduces several interferences at both sides. In order to manage this limitation, it has been decided to analyze the same performance indicators presented in the previous section but assuming complementary usage of an S-band HPA and S-band receiver along the orbit: the first will be switched on where the ground track is below 6° N latitude and switched off elsewhere, the second will have the opposite functioning.
This latitude threshold has been derived by analyzing the first ground track latitude for which the satellite is in visibility for a user in a service volume defined in the South Pole region (from 70° S latitude to 90° S latitude), along one year, and taking the maximum value experienced in this year: this means that the S-band payload is “useful” just for the portions of the lunar surface below this value.
As expected from the limited availability of the satellite functions and for the orbit geometry (the reception phase corresponds to the trajectory portion near the perilune, so it is relatively brief with respect to the transmission phase), all of the time visibility percentages are severely reduced while the PoS levels are not affected, but the PDOP availability has increased (with more favorable geometries despite the highly reduced visibility windows) and the daily availability is interestingly stable for around a couple of hours per day (suggesting that the overall visibility reduction is mainly due to the shrinking of the longest windows along the year).
3.2.3. Case 3: Rx or Tx + Earth
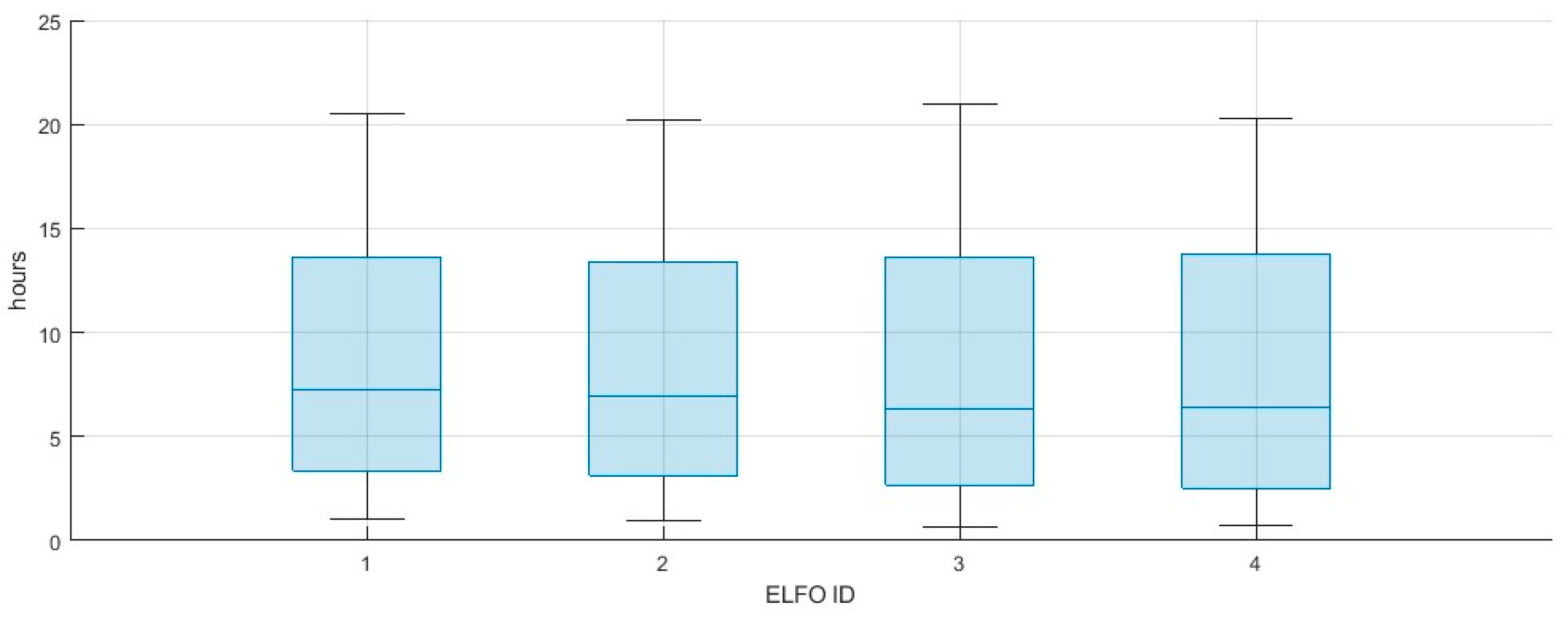
In this last case, a combination of monitoring from Earth using ground sites and from lunar orbit using ELFO satellites receivers when not in visibility from the South Pole is analyzed: hereafter, the S-band signal is considered as monitored when at least one among these four assets is in visibility. The results are summarized in the following table (
Table 10) and in the following figure (
Figure 3).
As a reference, monitoring from Earth is compared: despite the ELFO satellites, the HPA is switched off for entire portions of the orbit, and the additional receiving asset with respect to the Earth sites resulted in incremented visibility, with higher daily availability (divided into more individual windows), lower gaps and lower slots with just one asset receiving.
3.2.4. Omnidirectional Antenna on-Board vs. Pointed Antenna
The strong assumption of an omnidirectional antenna for the on-board receivers is justified by the ongoing studies on the complex attitude required by the satellite of such a constellation: at least, the nadir-pointing for the S-band transmitter antenna, Earth-pointing for the TT&C antenna and Sun-pointing for the solar panels are all to be satisfied with some level of accuracy. For this reason, it is difficult at this level of maturity to also introduce such a constraint on the S-band receiver antenna.
Anyway, a preliminary analysis has been run, starting from “Case 1: always Rx + Tx”, introducing a standard nadir-pointing with Sun constraint for the ELFO satellites (i.e., body Z-axis aligned with nadir and body Y-axis projection on XZ-plane aligned with Sun direction, for the solar panels) and constraining S-band reception from just one plane of the XYZ body reference (i.e., FoV = 180° and a total of five possible direction, excluding the nadir).
The best numbers for the availabilities correspond to a receiver antenna pointing at the Az-El coordinates (90°, 0°) in a satellite body frame, with values still between 8% and 11% over one year (they were around 100% without this constraint). Given the uncertainty in the final attitude of the satellite, there is some margin for optimization, but the usage of an omnidirectional receiver antenna is strongly suggested in case this strategy is picked.
3.3. Monitoring from Lunar Orbit
The issues caused by the simultaneous roles of transmitters and receivers exercised by the ELFO satellites are overcome by decoupling these functions in the monitoring system and considering an independent orbiter able to receive the S-band signals, in this way also keeping the advantages of the reduced losses and improved geometry.
The effect of orbital drift due to Earth perturbations is mitigated choosing a low orbital period (i.e., two hours, or 123 km altitude), while the inclination is set to 90 degrees (polar orbit, in order to be aligned with South-Pole coverage of the ELFO constellation) and the eccentricity to zero (circular orbit). The orbiter has been equipped with a receiver and the reception has been assumed to be possible just from the zenith-pointing plane of the satellite. This last assumption has been made with a realistic placement of the receiver in mind on the panel pointing outward, i.e., towards space and towards the ELFO satellites.
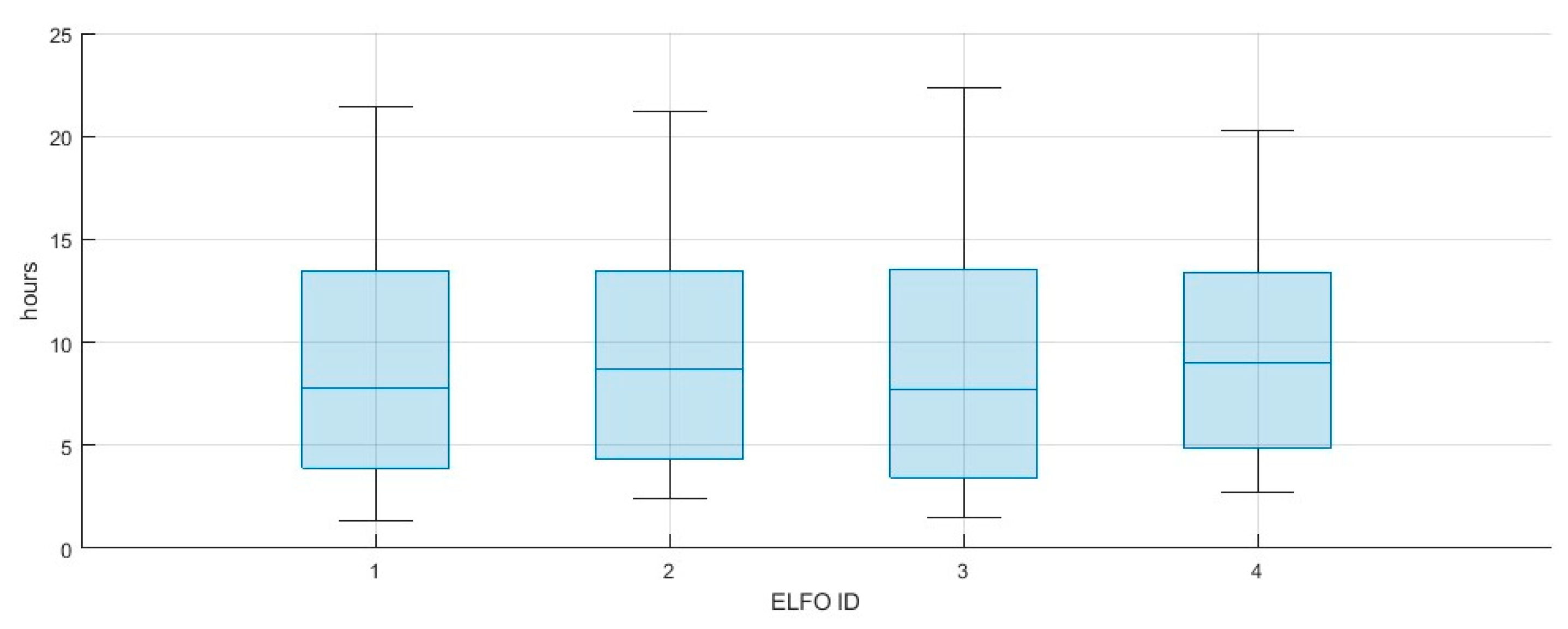
In the first table (
Table 11), the availability and reception of multiple signals is analyzed, also presenting geometrical conditions for a possible PVT by the orbiter itself.
In the second table (
Table 12), the RF power level of the different S-band signals from the orbiter side are obtained and availabilities are computed.
The “total time in view” KPI exhibits higher values with respect to the cases in which monitoring from Earth has been considered, with a stable daily availability between 8 and 11 h and highly acceptable power levels. The other way around, the possibility to compute the PVT is constrained both in time and in geometry by the high velocity of the orbiter on its orbit, that leads to highly non-continuous and un-symmetric exploitation of the slots where the four ELFO satellites are above the South Pole. Moreover, not only must the SISE analysis of the S-band signals be faced, but also an accurate orbit determination of the orbiter is needed as a pre-condition for the PVT. These two last further analyses, together with an eventual optimization of the orbital parameters of the orbiters in order to improve the relative geometries with the ELFO constellation, are a clear way forward for this Case 3.



{kind=link}
{kind=link}
{kind=link}