1. Introduction
In recent years, the European Commission has been working on the establishment of a standalone Galileo Timing Service. The successful execution of such a service necessitates the arrangement of all essential components to achieve and maintain a specific performance level throughout the system’s lifespan. By stating the minimum performance level, users can rely on this service for their application development. To guarantee the proper processing of service signals and the minimum performance level of the user receiver contributing to the end-to-end performance, relevant standards are required. Hence, a key aspect of the Galileo Timing Service concept is the standardization of Galileo Timing Receivers.
Previously, specific activities ([
1,
2]) were carried out that established the need and interest in developing a standard for GNSS Timing Receivers. From this context came the first international initiative with the objective of defining a standard for GNSS Timing Receivers. This initiative was carried out thanks to the support of the STARLITE (Preparation of Standards for Galileo Timing Receivers) project, fully funded by the European Commission. The project’s consortium is formed by GMV as leader with Alter, UNE, and EY as partners.
The standard takes into account the Galileo Timing Service characteristics, which are essential to guarantee end-to-end commitments to users operating receivers developed according to the standard. Therefore, all Galileo Timing users will be able to benefit from these commitments, which have a special focus on critical infrastructure and critical applications.
The standard defines functional and performance requirements and associated tests for Galileo Timing Receivers. Manufacturers have the flexibility to select their own implementation approach, as no specific algorithm implementation is specified in the standard.
The standardization process is carried out within the framework of CEN/CENELEC JTC5 Working Group 9 “Galileo Timing Receivers”. In this group, experts from several countries have been working on the draft European standard prEN 16605. This draft has been submitted to the inquiry phase, which will be completed by the end of May 2024. With the current timeline, the standard is expected to be published by the end of 2024.
The objective of this paper is to summarize the main results of the STARLITE project activities and, in particular, perform an analysis of the details of the standard, such as the requirements, both at the functional and performance level, and the associated test suite. This paper provides an updated and refined view of these activities, extending the content of the paper presented at the 2023 ION GNSS+ conference [
3].
2. Galileo Timing Service and Definition of Galileo Timing Receivers
2.1. Galileo Timing Service
As part of Galileo’s second-generation mission, a dedicated Timing Service (TS) will be established. This service is intended to ensure end-to-end commitments to improve the performance and robustness of users. To this end, standardized Galileo Timing Receivers are considered an integral part of the service concept.
One of the main features of this service is that it will be provided with a Timing Service Level Monitoring capability that will continuously check the performance of the Galileo System Time (GST) as well as the Universal Time Coordinated (UTC) solutions. In addition, it will generate a Timing Service Message (TSM) with specific information for timing users, including timing flags, that will be broadcast through the Galileo Signal in Space (SIS). This capability increases the reliability of the timing solution, establishing a pioneering integrity layer for timing and synchronization users on top of the inherent timing capabilities of Galileo.
The definition of the operational status of this service can be found in [
4]. Three service levels are defined, each one through a Maximum Tolerable Error (MTE) that is used in integrity monitoring as a threshold. The Galileo monitoring capability, together with the reliability of the system, will ensure that the probability that the time error is above the MTE of the service level in which it is operating, without the user being alerted, is lower than 10
−5 per hour.
The content of the TSM will consist of GST status flags and a UTC status flag. In the case of GST flags, one flag will be distributed for each Galileo satellite, while the UTC flag will be for the whole constellation. The flags will contain the “use” or “do not use” information particularized for each of the service levels.
2.2. Galileo Timing Receivers
The Galileo Timing Service covers two time scales—on the one hand, the inherent Galileo System Time and, on the other hand, the UTC realization through Galileo, obtained from GST by applying the offset transmitted in the SIS.
The Galileo Timing Receivers described in the standard have the following output characteristics:
One-Pulse-Per-Second signal (1PPS). This output is usually provided through a dedicated connector on the receiver. The user can usually select whether GST or UTC is desired as the 1PPS.
The Time of Day (TOD) contained in a data message or “label”. TOD is generally reported for both UTC TOD and GST TOD. This message is generated immediately after the 1PPS and is typically reported in National Marine Electronics Association (NMEA) format through a serial port on the receiver.
In addition, a frequency signal disciplined with 1PPS is optionally available. Typically, this signal is 10 MHz and comes out of another dedicated connector on the receiver.
When a GNSS receiver performs the Position, Velocity and Time (PVT) calculation, it is able to estimate the receiver clock bias, i.e., the clock offset versus GNSS Time (GNSST). With this, the receiver is able to electronically advance or delay the 1PPS signal such that it is aligned with GNSST. If the position of the receiver is fixed and known, only one unknown per constellation remains to be solved in the PVT calculation. Therefore, in the case of a single constellation, only one satellite pseudorange is needed to calculate it. Once the clock bias estimation versus GNSST has been solved, the bias versus UTC can be calculated by applying the UTC Offset (UTCO), and the UTC TOD can be obtained from the GNSST TOD by applying the integer number of leap seconds.
Generally, we can distinguish between two types of users of these receivers: synchronization users and timing users. Synchronization users use the 1PPS signal and usually have no special interest in TOD, or they obtain it through other means, such as the Network Time Protocol (NTP). On the other hand, timing users make use of both the 1PPS and TOD signals. Currently, the typical accuracy performance required by critical infrastructure ranges from 1 microsecond to 100 ns. A few applications go so far as to exploit the maximum accuracy that GNSS receivers can offer of a few nanoseconds. The number of applications exploiting more accurate time solutions is expected to increase. Each of the service levels defined in the Galileo Timing Service aims to cover a wide range of applications by providing integrity to the timing solution. The first version of the standard focuses on two service levels, while a third service level, intended to ensure errors in the order of a few nanoseconds, is expected to be covered in a future revision of the standard.
3. Requirements for Galileo Timing Receivers
3.1. Functional Requirements
3.1.1. Constellations and Frequencies Processed, Operational Modes and Time Scales
The nominal mode of operation of a Galileo Timing Receiver is Galileo-only with the ionosphere-free dual frequency (E1 + E5a or E1 + E5b) combination. The standard allows multi-constellation processing with GPS. Nevertheless, the standard requires a Galileo-only mode on which the full set of requirements must be tested.
Regarding operational modes, the standard refers to receivers that operate in static conditions, and it is assumed that the antenna position is known with high levels of accuracy. Moving users are not considered in the standard. The standard includes an annex with installation and maintenance guidelines that explain the techniques to calculate the position of the antenna accurately, as detailed in
Section 5.
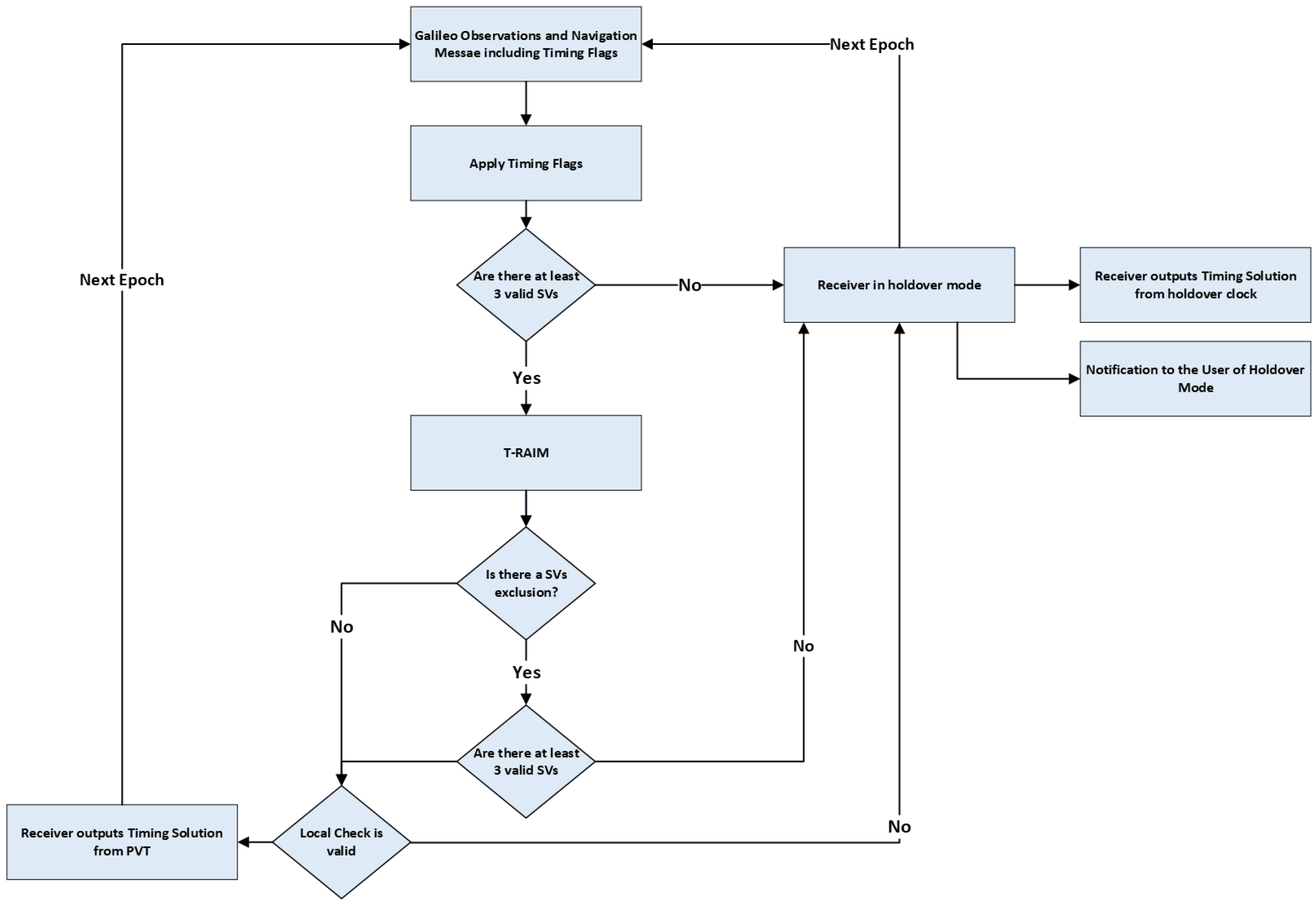
The output of the Timing Receiver must be aligned either with the GST or the UTC. In order to be aligned with a time scale, it is necessary to have a valid time solution. In the event that a valid solution is not available, the receiver shall either inform the user or enter a holdover mode. In this mode, the last valid reference output is maintained as long as possible. This functionality is commonly implemented either by a free-running local oscillator or by a software-driven local oscillator. This helps to improve the robustness and resilience of GNSS Timing Receivers, which are very important features for all timing applications, especially for critical infrastructure.
3.1.2. Timing Integrity
Integrity functionalities are considered fundamental for Galileo Timing Receivers. Specifically, two main functionalities are requested in the standard. On the one hand, the Timing Receiver shall correctly process the timing flags (for both GST and UTC) disseminated through the TSM. GST flags indicate for each satellite whether or not it can be used for the calculation of the PVT solution depending on the Service Level. If a satellite is marked as “Don’t use”, it has to be excluded from the solution. The complete processing logic is described in detail in [
4].
Furthermore, the receiver shall also execute a local barrier, namely, a Timing Receiver Autonomous Integrity Monitoring (T-RAIM) algorithm for every timing solution output. This algorithm works as a local barrier and shall be able to detect and exclude faulty satellites from the timing solution. While knowing the antenna position allows for the calculation of the timing solution with just one satellite, to be able to exclude satellites, it is necessary to have at least two degrees of freedom, which means that at least three valid satellites are needed.
The decision logic of the receiver is shown in
Figure 1. The figure illustrates the sequential application of the flags first, followed by the T-RAIM. The standard also allows for other potential local barriers implemented by manufacturers.
3.1.3. Anti-Jamming Capabilities
The standard requires the receiver to have jamming detection capabilities. Some techniques are suggested, such as cross-checks of the GNSST timing solution with alternative sources for the holdover mode. However, the possibility of implementing other types of barriers is left open.
The standard contemplates a nominal Radio Frequency (RF) environment for E1 and E5 of −194 dBW/Hz. These power levels are derived following a similar approach as in the European Organization for Civil Aviation Equipment (EUROCAE) Space-Based Augmentation System (SBAS) Dual-Frequency and Multi-Constellation Minimum Operational Performance Standard (MOPS) for GPS, Galileo and SBAS equipment. Under this scenario, the receiver shall remain under the specifications set by the service level and maintain the timing output without warnings or failures. Also, the nominal performance shall be maintained when operating under out-of-band interference as described in the European standard [
5] applicable also to Galileo Timing Receivers.
The standard also takes into account two scenarios with a degraded RF environment. Two typical types of interference generated with commercial jammers are considered: a continuous wave (CW) signal and a chirp interference signal. The characteristics of these interferences are detailed in
Table 1. In these cases, the receiver shall inform the user with a warning and change to the holdover mode or stop the 1PPS. In case the receiver is sufficiently robust against such interferences, so that the performances of the established service level are still met, it can continue to provide a valid output without warning.
Note that the RF interference central frequencies detailed in the previous table are offset from the GNSS central frequencies by 1 MHz on E1 and 2 kHz on E5a and E5b.
3.1.4. Anti-Spoofing Capabilities
Galileo Open Service Navigation Message Authentication (OSNMA) is required as part of the Galileo Timing Receiver standard. This is an authentication functionality, based on the Timed Efficient Stream Loss-Tolerant Authentication (TESLA) protocol, to be used as an anti-spoofing barrier.
This functionality is requested to be implemented in accordance with the official documentation provided by the European GNSS Service Centre [
6,
7,
8].
3.2. Performance Requirements
Performance requirements are based on the following base conditions:
Performance requirements are based on three main characteristics: accuracy, availability and integrity.
In terms of accuracy, the requirement is focused on the receiver’s contribution, which states that the Galileo Timing Receiver noise contribution to the timing solution will be lower than 0.3 ns (1-sigma).
Regarding availability, the contribution of the receiver must be such that the probability that a Galileo Timing Receiver, operating under the nominal conditions defined in the Galileo Timing Receiver Standard, does not provide valid outputs is lower than 10−4.
In the integrity requirements, it is established that the probability that the time error is above the MTE of the service level in which it is operating, without the user being alerted, is lower than 10−5 per hour. Each service level is defined in terms of an MTE. To achieve this requirement, two layers of barriers must be implemented—on the one hand, the correct processing of the TSM with a probability of incorrect processing below 10−5, and, on the other hand, a T-RAIM algorithm with an associated missed detection probability below 10−5.
To have an overview of the main requirements,
Table 2 shows a summary of the performance requirements.
4. Verification of Galileo Timing Receivers
The standard covers the verification of the fundamental requirements through the test methodology, while the other requirements can be verified by inspection or by review of the specifications provided by the manufacturers. The “black box” testing paradigm is used based strictly on functions and features.
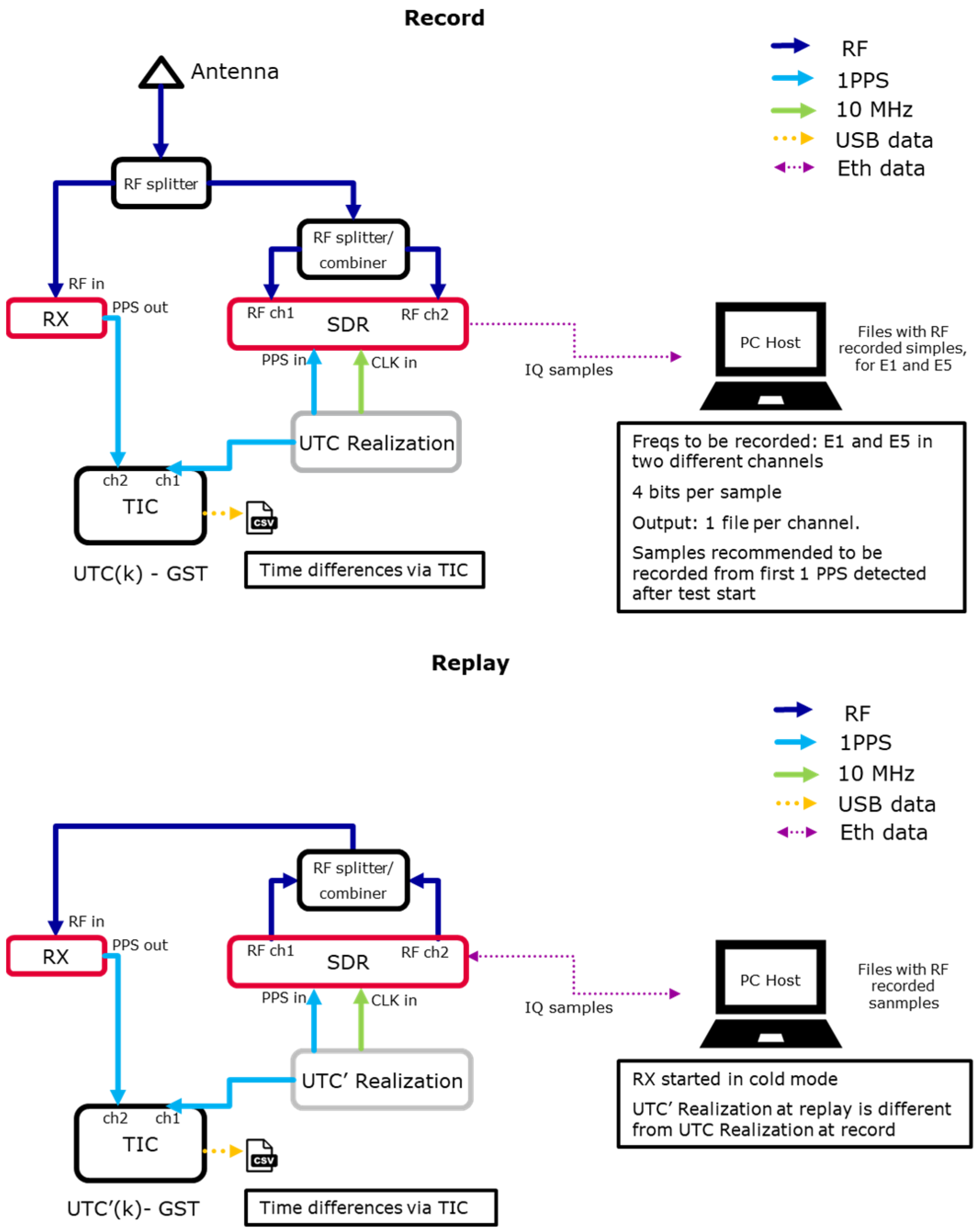
Most of the test cases that have been defined in the test suite are intended to follow a record and replay (R&R) approach. The R&R technique consists of digitizing the GNSS signals in an on-field campaign and then being able to reproduce these signals in a laboratory environment. These recordings must be carried out by a specialized laboratory ensuring that they correspond to a nominal situation provided for in the standard. In the standard, there is an informative annex with some considerations and details to take into account in order to make a signal recording. This test approach is already applied in other standards, such as [
9]. The advantages of this technique are that once the scenarios have been selected and recorded, it is possible to apply them to the Galileo receiver in a repeatable, realistic, unquestionable and cost-effective way.
It must be taken into account that to apply the R&R approach, it is necessary to have a Software-Defined Radio (SDR) or similar equipment. As this standard is proposed for dual-frequency receivers, at least two RF frontends are needed to process both frequency bands at the same time. Using this equipment implies that there is an RF propagation delay and an operation latency. This has to be taken into account during playback, since the signals will be subject to a delay affecting the timing solution.
In the context of the STARLITE project, experimentation was performed to try to determine a feasible hardware setup for R&R. In
Figure 2, a block diagram can be seen with the defined setup. The configurations for the recording phase and the replay phase are very similar, with the difference that the GNSS antenna and one of the splitters are not necessary for the replay phase.
Test Suite
To verify the main performance requirements and functionalities of a Galileo Timing Receiver, a test suite is defined. It is a light set consisting of a total of 13 different tests. These tests cover the following aspects:
One test to verify the correct processing of the timing flags.
Six tests focused on the performance of the different service levels for GST and UTC.
Two tests to assess the performance of the Galileo Timing Receiver when installed in obstructed or light indoor areas. No pass/fail criteria are established since the requirements in the standard always assume open sky conditions.
Two tests dedicated to RFI conditions, both nominal and degraded.
One test focused on T-RAIM’s integrity barrier capabilities.
One test to verify the receiver’s noise contribution to the timing solution.
The methodology to be used in most tests is to inject the recorded samples with an SDR kit (or equivalent equipment) and use a Time Interval Counter (TIC) to measure the time difference with the reference source. The T-RAIM test for analyzing the probability of missed detection and the receiver noise test are the only ones in which the simulator signal is needed to test the Galileo Timing Receiver. In any case, the simulator signal can be recorded to maintain the R&R approach.
5. Guidelines for Installation and Maintenance
For information purposes, to assist users with the installation and maintenance of Galileo Timing Receivers, the standard includes an annex with detailed guidelines. This annex is informative, but the recommendations provided in this section to the users and installers are strongly encouraged to be followed.
Galileo Timing and Synchronization (T&S) products utilize an embedded GNSS receiver (processing at least the Galileo constellation) as a primary reference. Typical installations of Galileo T&S products utilize an outdoor active GNSS antenna to collect and transmit GNSS satellite radio signals to the receiver via an RF cable.
Regarding the antenna, the selected one shall have the capability of receiving at least Galileo E1/E5 frequency bands. Antennas can include bandpass filtering and Low-Noise Amplifiers (LNAs). When calculating the required signal power for the equipment, it is important to keep in mind the loss due to the cables and connectors and the gain due to the LNA amplification.
To compute and configure the precise position of the antenna, Precise Point Positioning (PPP) techniques are recommended. Nevertheless, other techniques can also be used, such as post-processed Real-Time Kinematic (RTK). In the standard, some online free-of-charge PPP services are mentioned. To use those services, the user has to be registered and signed in and has to upload GNSS raw data in the Receiver Independent Exchange Format (RINEX).
A very relevant aspect also covered in the guidelines is the calibration of the equipment installed. The standard describes calibration methods and identifies the levels of calibration in line with the intended service levels.
6. Conclusions
The second generation of the Galileo system will implement a dedicated Galileo Timing Service with a commitment to timing accuracy that can support the most demanding applications in the critical infrastructure domain and monitoring capabilities to significantly enhance the robustness of the service. A fundamental part of this purpose is the development of a standard for Galileo Timing Receivers so that it can be ensured that receivers that comply with this standard can benefit from the end-to-end commitments.
This is the first international initiative to standardize a GNSS Timing Receiver. The European Commission, through the STARLITE project, led by GMV, began standardization activities. This standard has been worked on by several experts from different countries through CEN/CENELEC JTC5 WG9. From this work, it is expected to have a European standard published at the end of 2024.
This paper has summarized the most important requirements that a Galileo Timing Receiver must have. It has been seen that the expected functionalities are aligned with the needs and advances that occur in the sector. It is seen how integrity takes on a fundamental role in GNSS receivers for timing, since these types of applications need not only great accuracy but also a measure of confidence in the results. Thanks to the improvements provided with the Timing Service, Galileo Timing Receivers that comply with the standard will be the first to have a double integrity barrier, at the system level with the timing flags and at the local level with T-RAIM.
It has also been seen that the standard includes current concerns and trends to improve the resilience of equipment. It has been seen how the aspects of jamming and spoofing have been considered in its development, including, for example, the latest technologies available, such as OSNMA.
The way to verify the stated requirements has also been discussed. It has been seen how the recording and replay methodology has advantages for these tests. Furthermore, the test suite developed to verify the main requirements has been introduced. Mainly, the tests cover aspects related to the integrity of both flags and T-RAIM, the performance of the different service levels, behavior in conditions other than open sky and performance under interference conditions.
Finally, descriptions have been given regarding the installation and maintenance of the equipment, including relevant details to obtain the expected behavior, such as the type of antenna and its location, the precise position calculation of the antenna and the calibration of the equipment.
Author Contributions
Conceptualization, H.L., J.F. (Joaquim Fortuny), R.P., J.B. and F.A.; Methodology, H.L., J.F. (Joaquim Fortuny), R.P., J.B. and F.A; writing—original draft preparation, H.L. and J.F. (Joaquim Fortuny); writing—review and editing, H.L., J.F. (Joaquim Fortuny), M.S., J.P.B. and T.W.; Supervision, V.C., G.-J.P., J.F. (Javier Fidalgo), B.M., J.T., M.S., M.A., J.P.B. and T.W. All authors have read and agreed to the published version of the manuscript.
Funding
The work is performed in the framework of the STARLITE (Preparation of Standards for Galileo Timing Receivers) project, funded by the EC (DEFIS/2021/OP/0004) and aimed at initiating the standardization process of Galileo Timing Receivers.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
Authors Héctor Llorca, Javier Fidalgo and Ricardo Píriz are employed by the company GMV. Author Javier Bárcena is employed by the company Alter. Miguel Aguilera is employed by the company RHEA Group. Tom Willems is employed by the company CGI. The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
References
- Fidalgo, J.; Píriz, R.; Cezón, A.; Fernández, A.; Callewaert, K.; Bolchi, M.; Defraigne, P.; Bauch, A.; Danesi, A.; Jeannot, M.; et al. Proposal for the Definition of a Galileo Timing Service. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2019), Miami, FL, USA, 16–20 September 2019; pp. 827–839. [Google Scholar] [CrossRef]
- Píriz, R.; Buendía, F.; Martín, J.-R.; Fidalgo, J.; Defraigne, P.; Danesi, A.; Jeannot, M.; Boyero, J.P. Safety Analysis for a New GNSS Timing Service via Galileo. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2019), Miami, FL, USA, 16–20 September 2019; pp. 3359–3376. [Google Scholar] [CrossRef]
- Fidalgo, J.; Píriz, R.; Ortas, G.; Bárcena, J.; Arribas, F.L.; Callewaert, K.; Catalano, V.; Pauwels, G.-J.; Sgammini, M.; Fortuny, J.; et al. Standardisation of Galileo Timing Receivers. In Proceedings of the 36th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2023), Denver, CO, USA, 11–15 September 2023; pp. 1572–1586. [Google Scholar] [CrossRef]
- European Union Agency for the Space Programme. Galileo Timing Service Message Operational Status Definition (TSM OSD); Issue 1.0.; EUSPA: Prague, Czech Republic, 2024. [Google Scholar]
- ETSI EN 303 413 V1.2.1; Satellite Earth Stations and Systems (SES); Global Navigation Satellite System (GNSS) Receivers; Radio Equipment Operating in the 1 164 MHz to 1 300 MHz and 1 559 MHz to 1 610 MHz Frequency Bands; Harmonised Standard for Access to Radio Spectrum. European Telecommunications Standards Institute: Sophia Antipolis, France, 2021.
- European Union Agency for the Space Programme. Galileo Open Service Navigation Message Authentication (OSNMA) Info Note; EUSPA: Prague, Czech Republic, 2021. [Google Scholar]
- European Union Agency for the Space Programme. Galileo Open Service Navigation Message Authentication (OSNMA) Signal in Space Interface Control Document (SIS ICD); Issue 1.1.; EUSPA: Prague, Czech Republic, 2023. [Google Scholar]
- European Union Agency for the Space Programme. Galileo Open Service Navigation Message Authentication (OSNMA) Receiver Guidelines; Issue 1.3.; EUSPA: Prague, Czech Republic, 2024. [Google Scholar]
- EN 16803-2:2020; Use of GNSS-Based Positioning for Road Intelligent Transport Systems (ITS). CEN/CENELEC: Brussels, Belgium, 2020.
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).


 ,
, 

{kind=link}
{kind=link}