
Advanced Virtual Synchronous Generator Control Scheme for Improved Power Delivery in Renewable Energy Microgrids †


 and
and 
Abstract
1. Introduction
2. Proposed Methodology
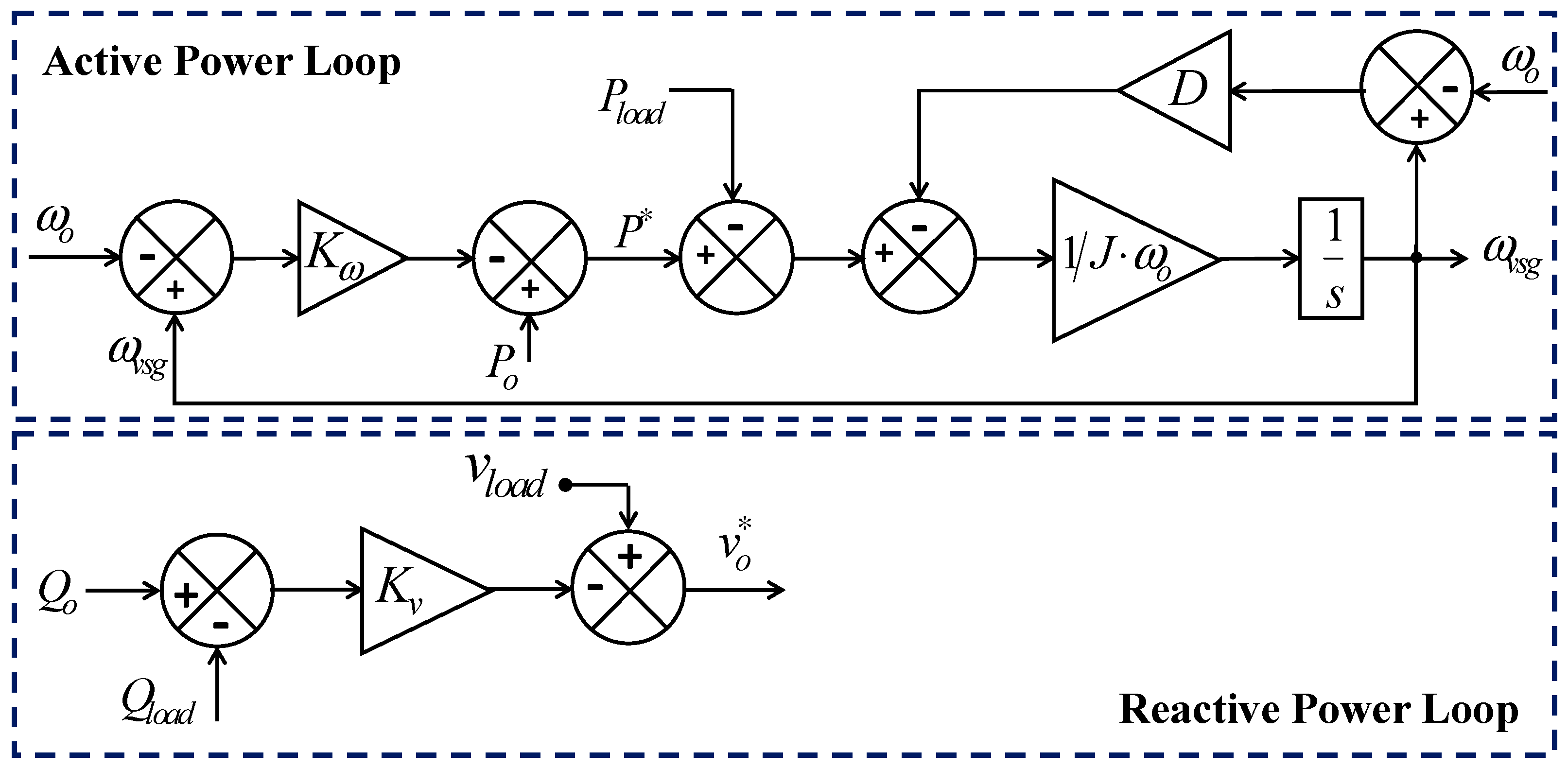
2.1. Power Control Loops
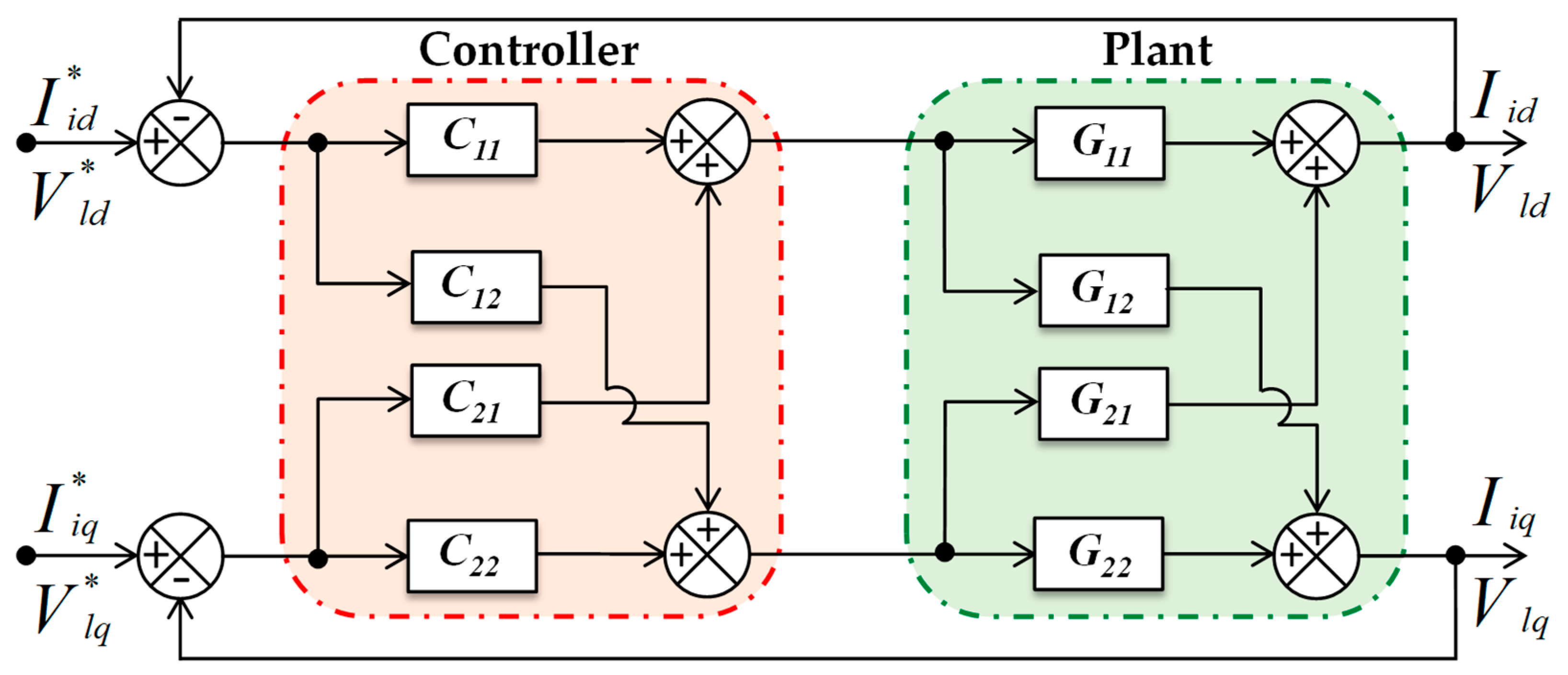
2.2. Hybrid Voltage and Current Control Loops (HVAs)
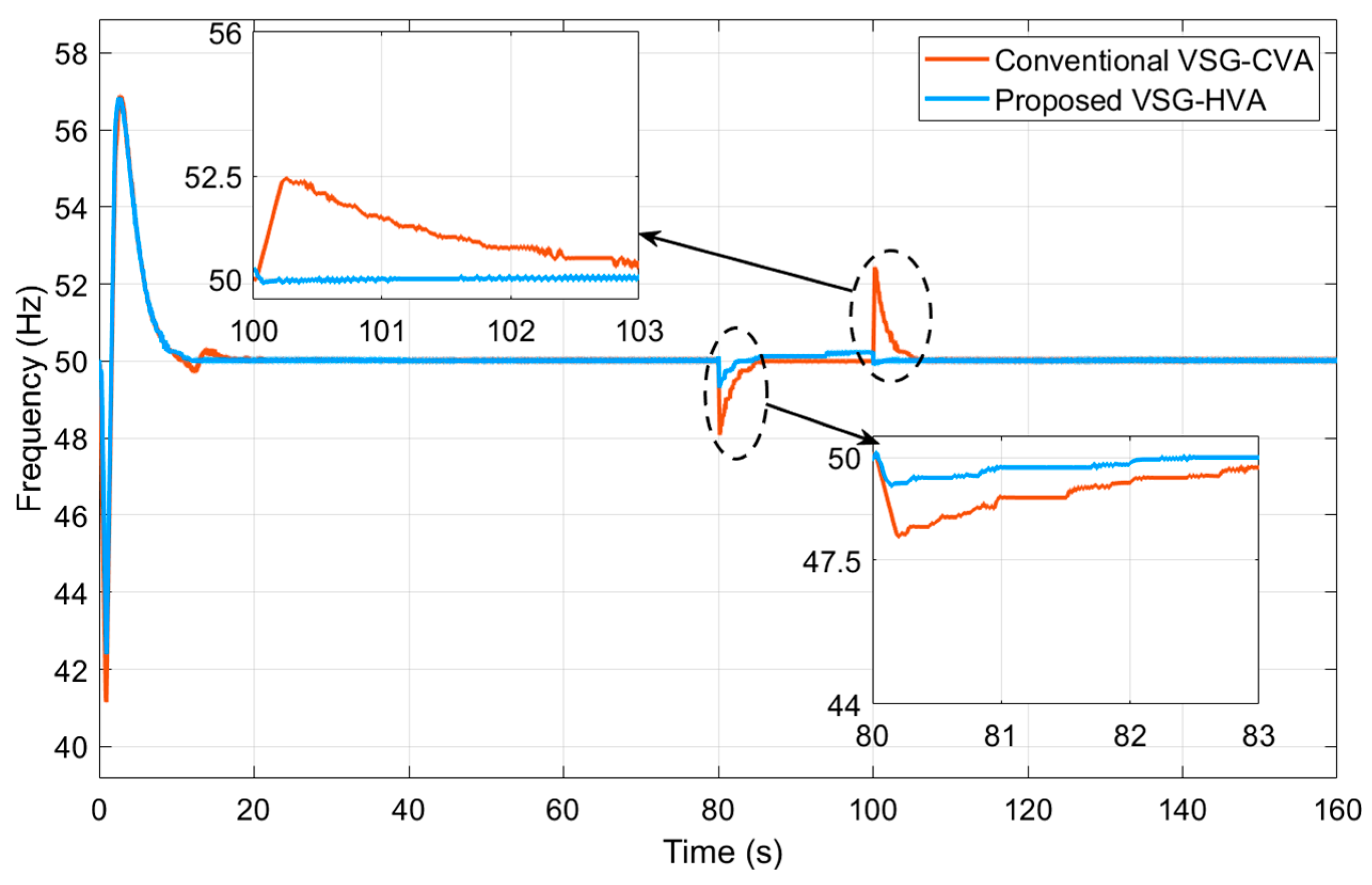
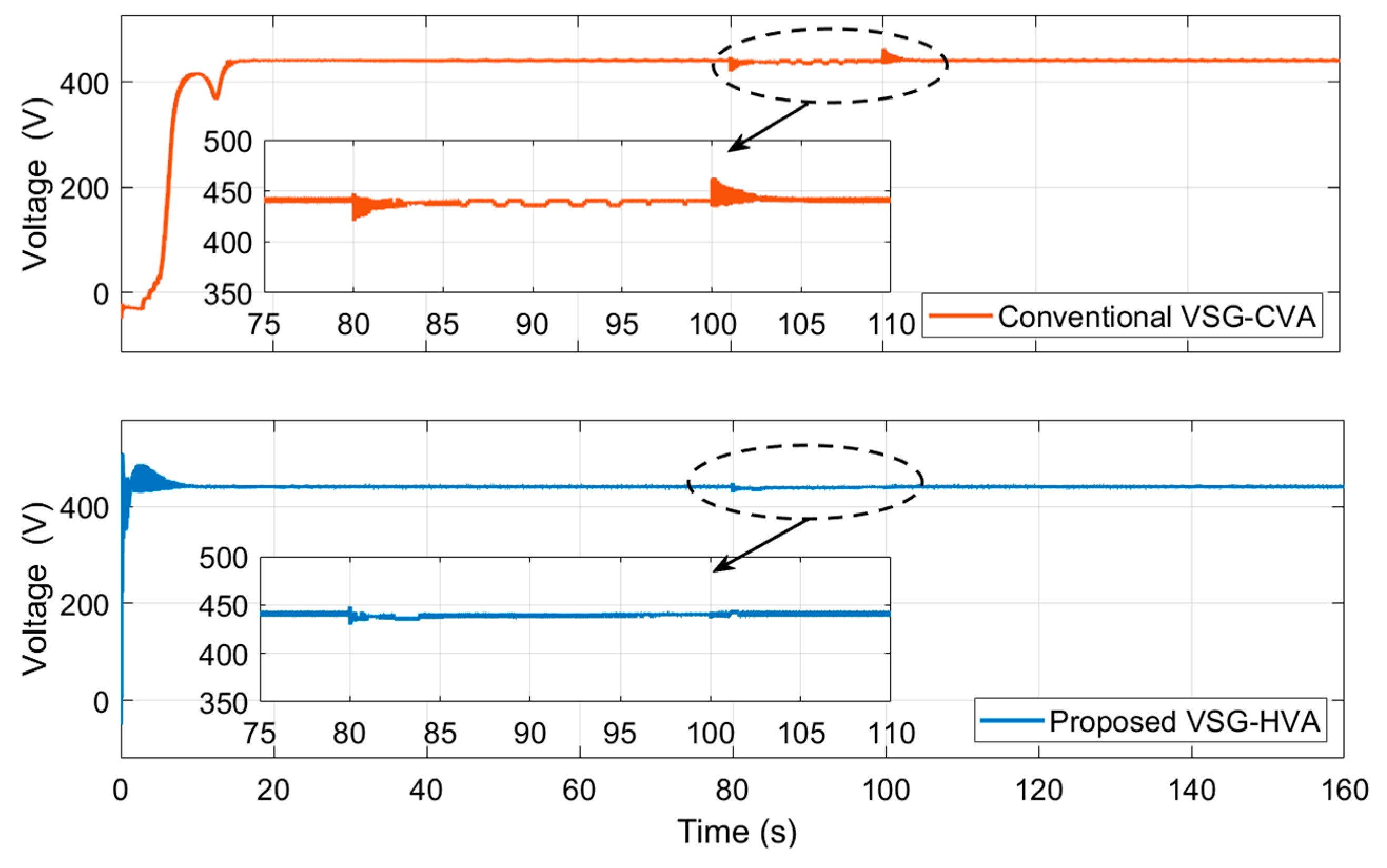
3. Results and Discussion
3.1. Evaluation Criterion
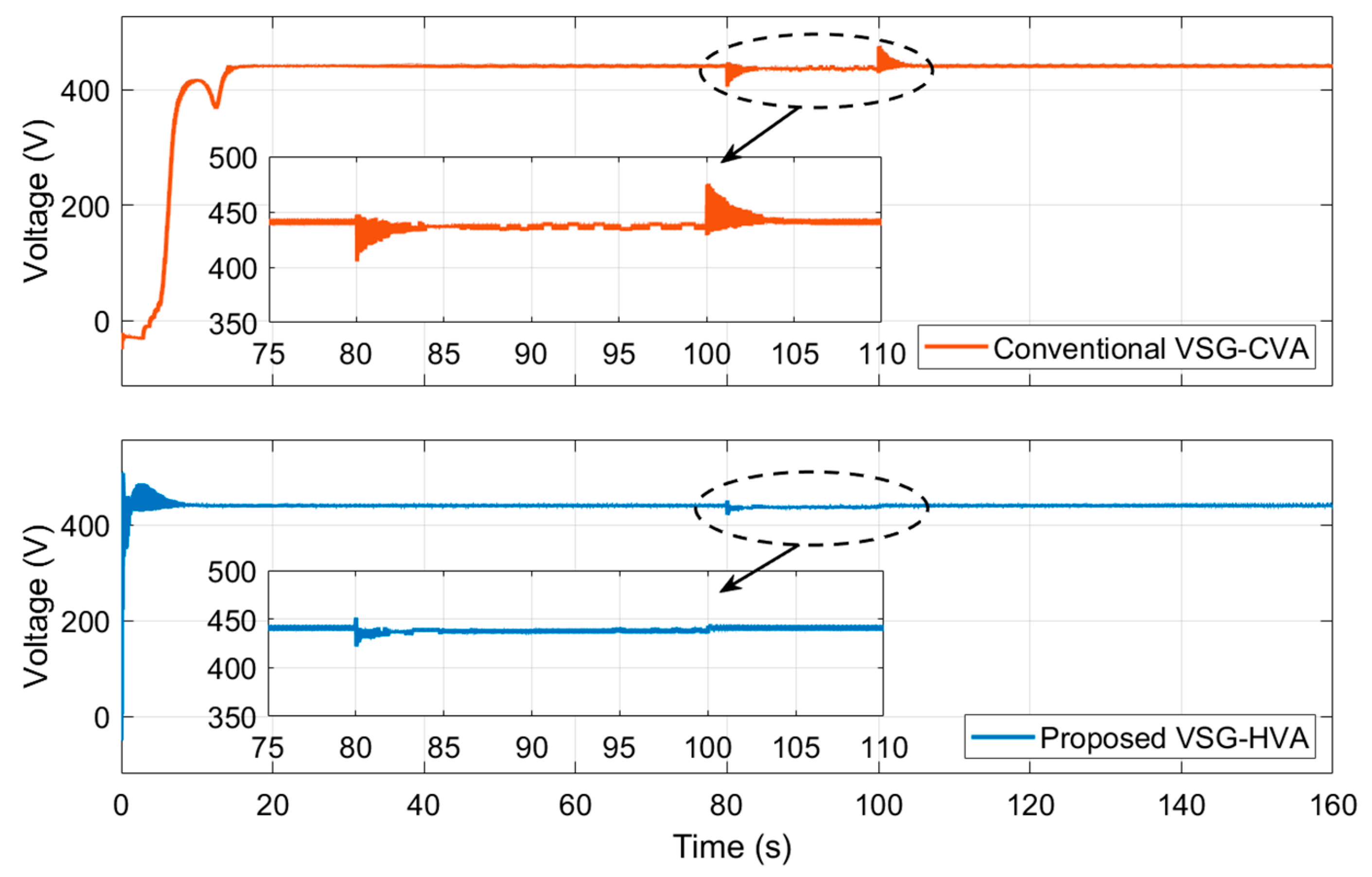
3.2. Test Case 1 (T1)
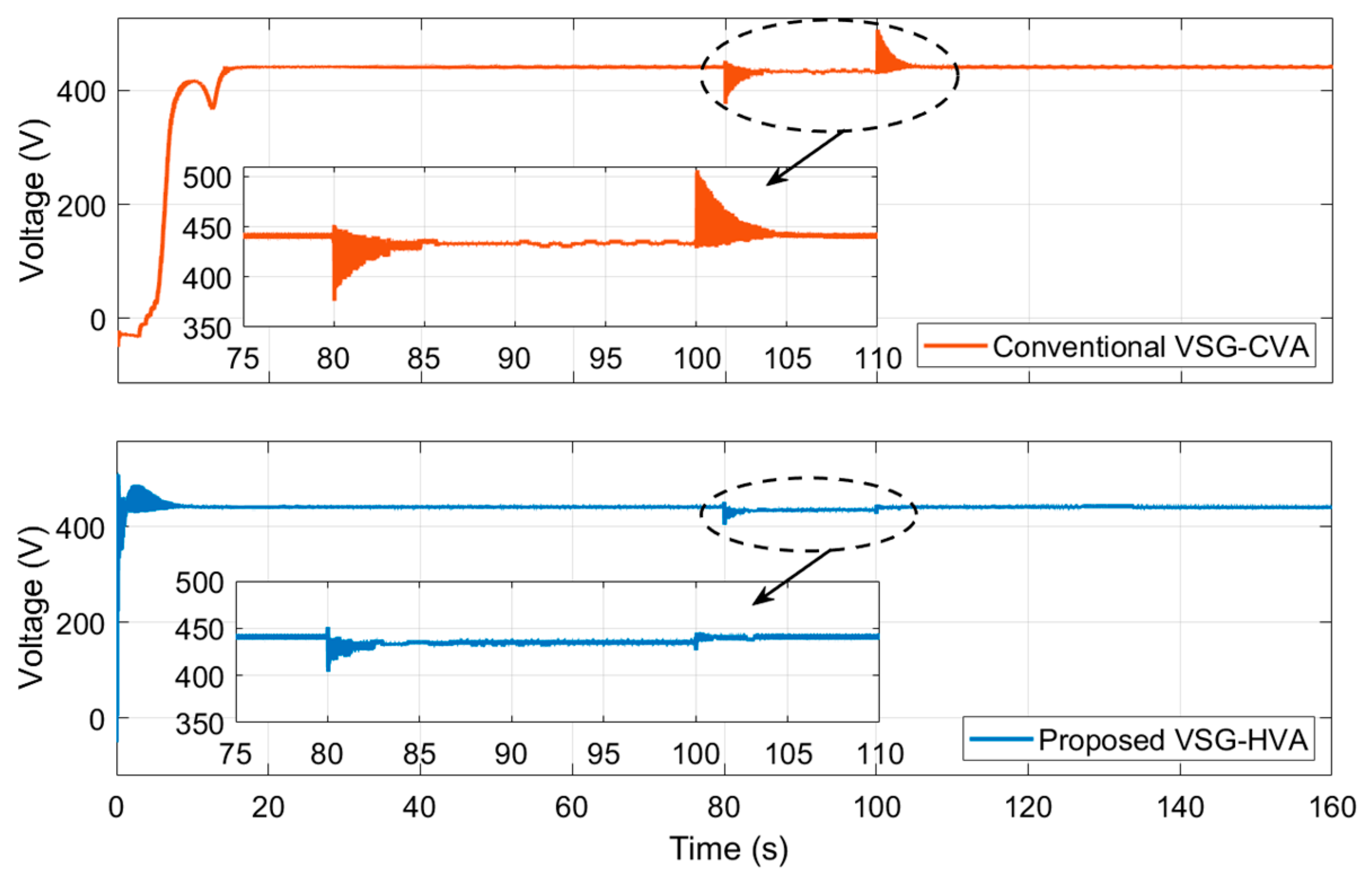
3.3. Test Case 2 (T2)
3.4. Test Case 3 (T3)
4. Conclusions
4.1. Limitation
4.2. Future Scope
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Salam, I.U.; Yousif, M.; Numan, M.; Billah, M. Addressing the Challenge of Climate Change: The Role of Microgrids in Fostering a Sustainable Future—A Comprehensive Review. Renew. Energy Focus 2024, 48, 100538. [Google Scholar] [CrossRef]
- Peter, N.; Gupta, P.; Goel, N. Intelligent strategies for microgrid protection: A comprehensive review. Appl. Energy 2025, 379, 124901. [Google Scholar] [CrossRef]
- Alipoor, J.; Miura, Y.; Ise, T. Stability Assessment and Optimization Methods for Microgrid with Multiple VSG Units. IEEE Trans. Smart Grid 2018, 9, 1462–1471. [Google Scholar] [CrossRef]
- Guan, M.; Pan, W.; Zhang, J.; Hao, Q.; Cheng, J.; Zheng, X. Synchronous Generator Emulation Control Strategy for Voltage Source Converter (VSC) Stations. IEEE Trans. Power Syst. 2015, 30, 3093–3101. [Google Scholar] [CrossRef]
- Dheer, D.K.; Soni, N.; Doolla, S. Improvement of Small Signal Stability Margin and Transient Response in Inverter-Dominated Microgrids. Sustain. Energy Grids Netw. 2016, 5, 135–147. [Google Scholar]
- Srikanth, M.; Kumar, Y.V.P.; Amir, M.; Mishra, S.; Iqbal, A. Improvement of Transient Performance in Microgrids: Comprehensive Review on Approaches and Methods for Converter Control and Route of Grid Stability. IEEE Open J. Ind. Electron. Soc. 2023, 4, 534–572. [Google Scholar] [CrossRef]
- Zhao, H.; Yang, Q.; Zeng, H. Multi-loop virtual synchronous generator control of inverter-based DGs under microgrid dynamics. IET Gener. Transm. Distrib. 2017, 11, 795–803. [Google Scholar] [CrossRef]
- Wu, H.; Ruan, X.; Yang, D.; Chen, X.; Zhao, W.; Lv, Z.; Zhong, Q.-C. Small-Signal Modeling and Parameters Design for Virtual Synchronous Generators. IEEE Trans. Ind. Electron. 2016, 63, 4292–4303. [Google Scholar] [CrossRef]
- Alipoor, J.; Miura, Y.; Ise, T. Power System Stabilization Using Virtual Synchronous Generator with Alternating Moment of Inertia. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 451–458. [Google Scholar] [CrossRef]
- Ur Rehman, H.; Yan, X.; Abdelbaky, M.A.; Ullah Jan, M.; Iqbal, S. An advanced virtual synchronous generator control technique for frequency regulation of grid-connected PV system. Int. J. Electr. Power Energy Syst. 2021, 125, 106440. [Google Scholar] [CrossRef]
- Kerdphol, T.; Rahman, F.S.; Watanabe, M.; Mitani, Y.; Turschner, D.; Beck, H.P. Enhanced Virtual Inertia Control Based on Derivative Technique to Emulate Simultaneous Inertia and Damping Properties for Microgrid Frequency Regulation. IEEE Access 2019, 7, 14422–14433. [Google Scholar] [CrossRef]
- Srikanth, M.; Kumar, Y.V.P. Improved Virtual Synchronous Generator-Based Control Scheme for Enhanced Transient Response in Microgrids. Eng. Proc. 2023, 56, 4. [Google Scholar] [CrossRef]
- Srikanth, M.; Venkata Pavan Kumar, Y. Empowered Virtual Synchronous Generator Based Control Scheme for Improved Transient Response and Reduced Nuisance Tripping in Stable Microgrids. IEEE Access 2024, 12, 99968–99988. [Google Scholar] [CrossRef]
- Pavan Kumar, Y.V.; Bhimasingu, R. Design of Voltage and Current Controller Parameters Using Small Signal Model-Based Pole-Zero Cancellation Method for Improved Transient Response in Microgrids. SN Appl. Sci. 2021, 3, 836. [Google Scholar] [CrossRef]
- Srikanth, M.; Venkata Pavan Kumar, Y. State machine and internal model control-based hybrid controller for improved transient performance of microgrids. Energy Rep. 2024, 12, 5300–5319. [Google Scholar] [CrossRef]
- Srikanth, M.; Venkata Pavan Kumar, Y.; Pradeep Reddy, C.; Mallipeddi, R. Multivariable Control-Based dq Decoupling in Voltage and Current Control Loops for Enhanced Transient Response and Power Delivery in Microgrids. Energies 2024, 17, 3689. [Google Scholar] [CrossRef]
- D’Arco, S.; Suul, J.A.; Fosso, O.B. Automatic tuning of cascaded controllers for power converters using eigenvalue parametric sensitivities. IEEE Trans. Ind. Appl. 2015, 51, 1743–1753. [Google Scholar] [CrossRef]
- Liu, J.; Miura, Y.; Ise, T. Comparison of Dynamic Characteristics Between Virtual Synchronous Generator and Droop Control in Inverter-Based Distributed Generators. IEEE Trans. Power Electron. 2016, 31, 3600–3611. [Google Scholar] [CrossRef]
- Wang, Z.; Xiong, J.; Wang, X. Investigation of Frequency Oscillation Caused False Trips for Biomass Distributed Generation. IEEE Trans. Smart Grid 2019, 10, 6092–6101. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Condition | Test Case | For Load Switch ON at 80th s | For Load Switch OFF at 100th s | ||
|---|---|---|---|---|---|---|
| Conventional VSG-CVA [17] | Proposed VSG-HVA | Conventional VSG-CVA [17] | Proposed VSG-HVA | |||
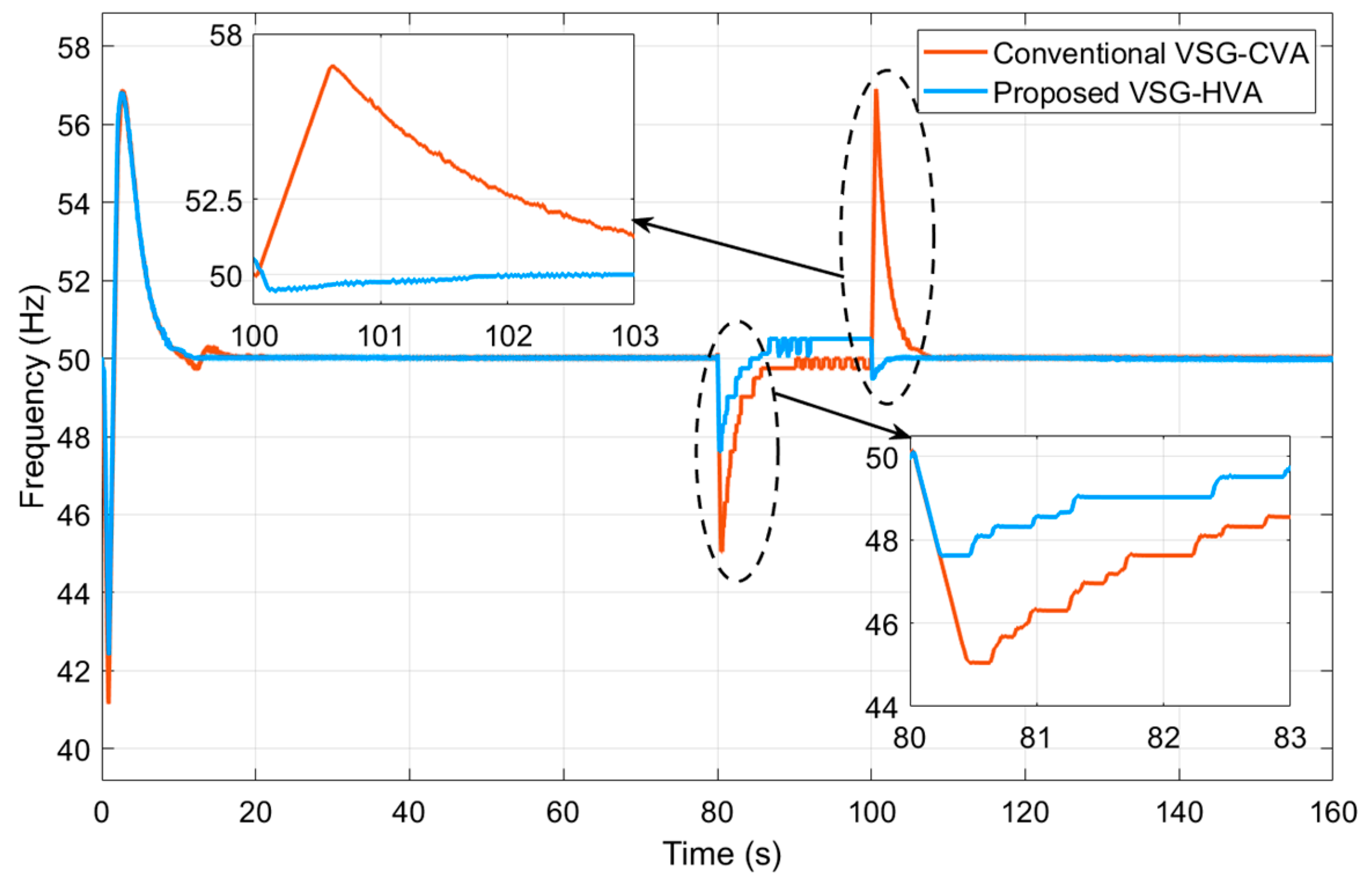
| Frequency | Deviation (Hz) | T1 | −1.5 | −0.63 | 2.5 | 0.05 |
| T2 | −3.1 | −1.25 | 4.2 | 0.1 | ||
| T3 | −4.96 | −2.39 | 6.9 | 0.48 | ||
| Time (s) | T1 | 0 | 0 | 0 | 0 | |
| T2 | 0.29 | 0 | 0.817 | 0 | ||
| T3 | 0.57 | 0 | 1.846 (Trip) | 0 | ||
| Voltage | Deviation (%) | T1 | −3.91 | −195 | 6.12 | 0.35 |
| T2 | −8.01 | −3.12 | 8.16 | 0.49 | ||
| T3 | −15.13 | −6.05 | 15.13 | 0.95 | ||
| Time (s) | T1 | 0 | 0 | 0.2 | 0 | |
| T2 | 0.35 | 0 | 0.6 | 0 | ||
| T3 | 1.34 (Trip) | 0.5 | 1.2 (Trip) | 0 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Srikanth, M.; Venkata Pavan Kumar, Y.; Rao, S.N.V.B. Advanced Virtual Synchronous Generator Control Scheme for Improved Power Delivery in Renewable Energy Microgrids. Eng. Proc. 2025, 87, 60. https://doi.org/10.3390/engproc2025087060
Srikanth M, Venkata Pavan Kumar Y, Rao SNVB. Advanced Virtual Synchronous Generator Control Scheme for Improved Power Delivery in Renewable Energy Microgrids. Engineering Proceedings. 2025; 87(1):60. https://doi.org/10.3390/engproc2025087060
Chicago/Turabian StyleSrikanth, Mandarapu, Yellapragada Venkata Pavan Kumar, and Sivakavi Naga Venkata Bramareswara Rao. 2025. "Advanced Virtual Synchronous Generator Control Scheme for Improved Power Delivery in Renewable Energy Microgrids" Engineering Proceedings 87, no. 1: 60. https://doi.org/10.3390/engproc2025087060
APA StyleSrikanth, M., Venkata Pavan Kumar, Y., & Rao, S. N. V. B. (2025). Advanced Virtual Synchronous Generator Control Scheme for Improved Power Delivery in Renewable Energy Microgrids. Engineering Proceedings, 87(1), 60. https://doi.org/10.3390/engproc2025087060