1. Introduction
The production of affordable solutions that include sensor networks and controlled systems has been made possible by recent developments in IoT (Internet of Things) technologies. Deploying an IoT-based infrastructure that can track, manage, and observe your devices has become simpler as a result. With the most recent developments, we have observed a significant advancement in intelligent biomedical support technology. With innovative technology, like bio-mechatronic components that replace human limbs and AI (artificial intelligence)-based object classification systems for the visually impaired, people with functional disabilities can now utilise these technologies to enhance their own quality of life. By utilizing these technologies and associated protocols, we have created a stabilizing mechanism and integrated it into a spoon which can be used by patients requiring assistance.
A patient with Parkinson’s disease experiences excruciating discomfort when using a plate or spoon to eat due to the neurodegenerative disorder’s uncontrollable tremors in their limbs. Depending on the individual, the disease’s symptoms may be disregarded for extended periods of time if they are moderate. Over time, the patient’s condition deteriorates and may even negatively impact breathing and speaking. There is currently no recognized cause for the Illness, meaning there is no definitive treatment. The potential of these biomedical aid devices holds potential for improving the lives of people with functional disabilities.
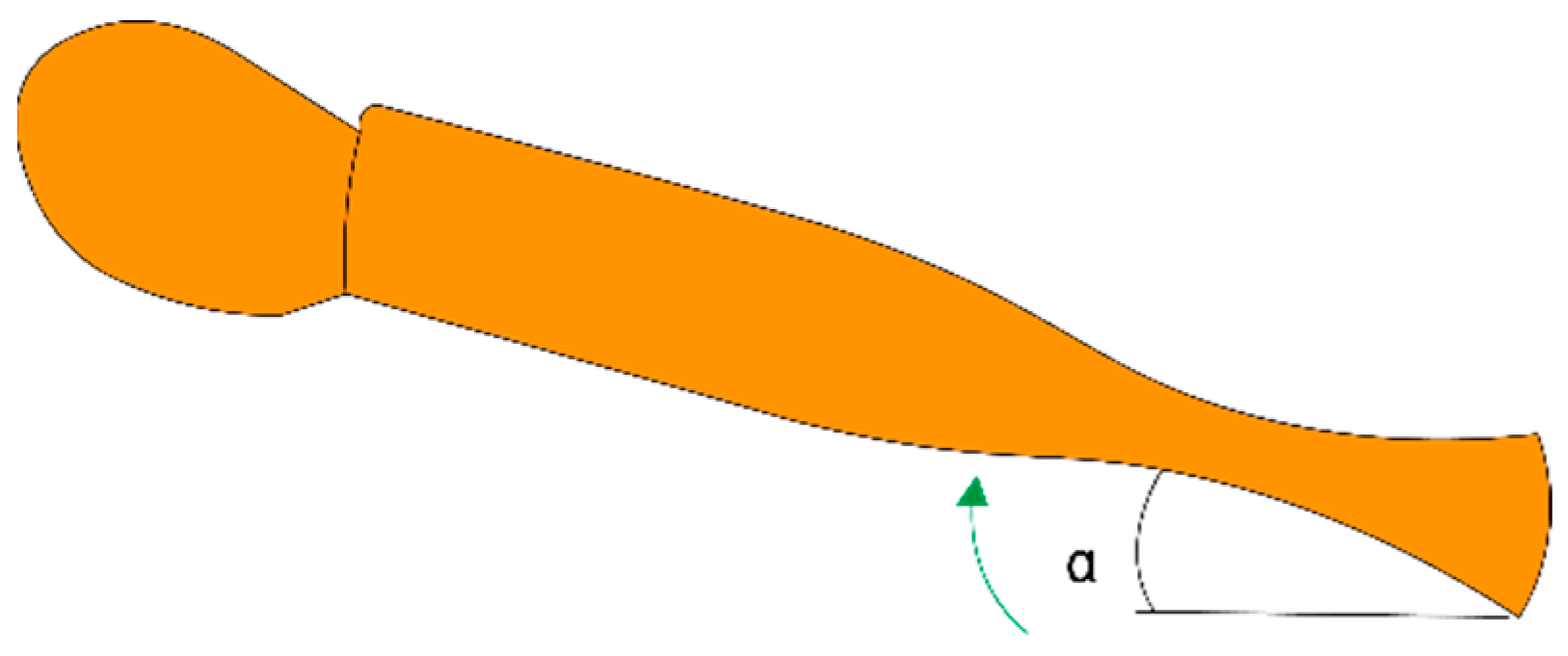
In order to offset the unwanted motion and vibration, stabilizing mechanisms are used in a variety of settings, including photography (gimbals) and airplanes. Our approach in this study is to incorporate these sophisticated controlled stabilizing mechanisms into a low-cost prototype in order to manufacture, as seen in
Figure 1, a self-stabilizing spoon that maintains its balance even when the user’s hand shakes or trembles. If it experiences any unanticipated tremor in its rear end, as seen in
Figure 2, it modifies the position of its head. These days, only large corporations produce these gadgets at high costs [
1], making them unaffordable for the average person.
A microcontroller board (in this case, an Arduino Uno) and a power supply, in the form of a five volt battery, make up the prototype. The inertial measurement unit (IMU) MPU6050 utilized is comprised of a gyroscope and an accelerometer both with three axes, which are oriented perpendicular to one another. Both the inertial acceleration and the rotational location relative to a standard frame may be determined by using an accelerometer and a gyroscope, respectively. When combined, the roll, pitch, and yaw of the tilt may be utilised to calculate the location of an item in space as well as its rate of travel into a certain angular position with respect to the cylindrical coordinate system. The electromechanical parts are two perpendicularly positioned, high-precision servo motors (SG90) with positional feedback. In order to achieve the desired calibration, they are rotated in accordance with the data collected by the sensors.
2. Literature Review and Related Works
The patent from the United States is titled “Stabilizing unintentional muscle movements”. A pioneer in the field of stabilizing spoons is Pathak et al., where a model of a processing unit connected to a remote non-contact position sensor and stabilizing mechanism was shown. The work is among the first in the subject and is very comprehensive. The prototype recommends an 8-bit ATMEGA8A programmable microcontroller as an option, coupled with an inertial sensor and a motion sensor, similar to the gyroscope and accelerometer used in our system [
1], but it does not specify the sort of microcontroller or processing unit to be supplied.
A similar idea, using the Arduino Nano as the controller, is presented in the publication “Self-Stabilizing Spoon for Parkinson’s Ailment” by Jaswanth, D.K. et al. After converting the ADC data from the accelerometer and gyroscope in the GY-273 module, equal and opposite calibration is applied as part of the stabilizing mechanism. HS-125MG analog motors are utilized in place of digital ones. By using a similar methodology and accounting for tremor speed, our paper achieves instantaneous calibration and the lowest feasible latency [
2].
A mounted damping mechanism, made possible by magnetic encoders, a gyroscope, and an accelerometer are suggested in the work “Preliminary design of an active stabilization assistive eating device for people living with movement disorders.” by Turgeon, Philippe et al. The SAM E70 ARM CortexM7 microcontroller from Atmel is used to run the system. The motor assembly, gearbox, transmission, and encoders are all attached to an external handle that the operator employs to operate the device’s extremely intricate Cartesian velocity-based damping algorithm. The one disadvantage of this concept is that, since neurodegenerative diseases are frequently associated with cognitive impairments such as dementia, the device lacks the portability and straightforward approach that these patients require. This study offers insightful information on the various tremors and movements that patients experience throughout various activities [
3].
Our project’s stabilising mechanism is similar to that described in “The Stabilizing Spoon: Self-stabilizing utensil to aid those with limited motor abilities.” by Abrahamsson, Johan et al., which is programmed on the Arduino Nano and uses the same motors and sensors. They have provided various algorithms and codes to calibrate the device, with a few being sourced from other projects and one being original. The paper provided an astute performance (frequency) analysis of fast and slow oscillations on MATLAB ver.2017a in their incredibly detailed research [
4].
The spoon is tested with both solid and liquid foods in various orientations at different frequencies of tremors. They also examined various load capacities of the device. The findings of these tests are remarkable and provide insights on how well our device compares with the market standards [
5].
An innovative method of measuring angular momentum using a MEMS (micro electro mechanical system) gyroscope and accelerometer is presented in “Development of MEMS Accelerometer based Hand Tremor Stabilization Platform” by Chowdhury D. et al. It is programmed on the AVR microcontroller giving three degrees of freedom through the tri-axis IMU. An error analysis of the accelerometer is provided with very well explained mathematics and physics. This paper has the most progressive work in the field by far [
6,
7,
8].
Researchers Ripin, Zaidi Mohd, and coworkers set out to determine if the market’s priciest stabilising spoon, made by Liftware, satisfy expectations considering its high price tag in their study “Preliminary Evaluation of Active Tremor Cancellation Spoon for Patients with Hand Tremor” [
9].
3. Methodology
Two axes must be maintained by the spoon in a horizontal position. To construct a 2-DOF system, two servo motors are placed orthogonally to one another [
10,
11,
12,
13]. The spoon bowl is meant to stay in a horizontal posture with this configuration in place.
3.1. Electronic Connections
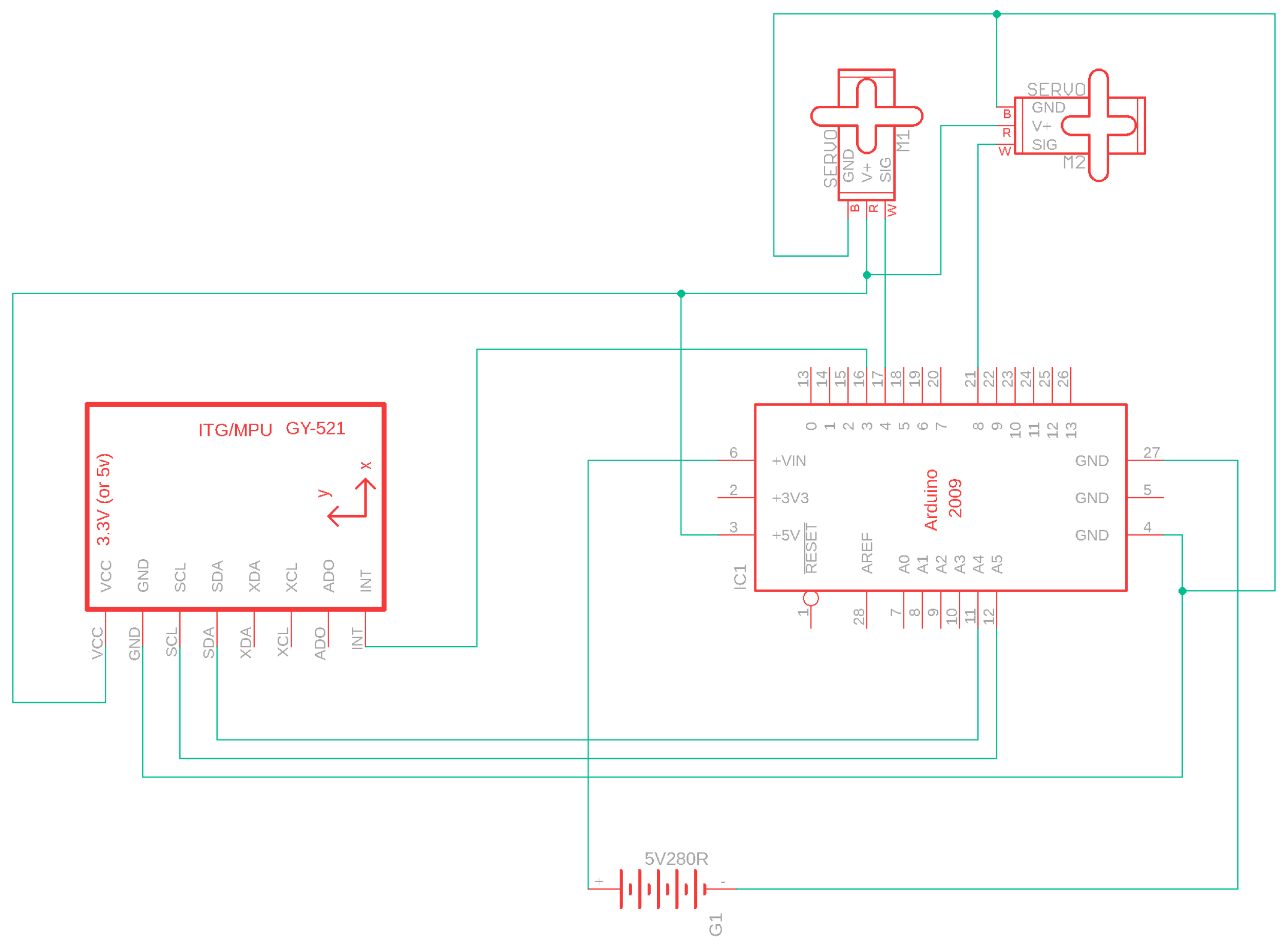
A 5-volt battery connected to the Arduino Uno microcontroller’s VCC junction provides remote power. A digital pin is used to receive the sensor interrupt, and an analog pin is used to relay the data and pulse. The servo motors are arranged perpendicularly on top of one another, in order to provide the device with two degrees of freedom. The designated digital pins are used to operate them. The Arduino, or a connected breadboard, provides the VCC and grounding for the sensor and the servos.
Figure 3 shows the circuit configuration [
14,
15,
16,
17,
18].
3.2. Initialization
In order to obtain the intended outcomes, the sensors and electromechanical components must first evaluate the surrounding conditions and determine the user’s frame of reference. Before being utilized, the sensors are calibrated for a duration of 3000 ms. During this time, they read the angular readings and calculate their average; these values serve as the foundation for the user’s position. For the first calibration period, the MPU6050 sensor delivers X, Y, Z, and temperature readings. We save and calculate the first three readings and ignore the temperature readings. This procedure is shown in
Figure 4.
3.3. Sensor
The sensor is an instrument that tracks variations in electrical, physical, or other characteristics and produces an output indicating those variations [
19,
20,
21].
3.4. Experimental Work
The self-stabilizing spoon acts like a gimbal, shifting its spoon head to counteract the user’s tremors. It starts with calibrating itself and getting an initial measurement of the angle it is at. Now, once that angle changes, a command to reposition is sent to the motors.
The technicality of the process is explained below:
Step 1: Initiate I2C protocol
Step 2: Input the motors, all variables and constants required for calculation
Step 3: Activate the servos and set them at 90°
Step 4: Activate the MPU 6050
Step 5: Generate a for loop (3000 ms) to take inputs X, Y, Z, and temperature.
Step 6: Convert Voltage inputs to angles (initial).
Step 7: Print Initial values of all three planes.
Step 8: Create new function to take final values of X, Y, Z, and temperature.
Step 9: Convert Voltage inputs to angles (final).
Step 10: Output to servo is (90 + final angle).
Step 11: Run loop for initial values once and keep running the loop for final values for constant calibration.
3.5. Calibration
The MPU 6050 sensor is given a 3 s calibration period to set up an initial value for the gyroscope assumed as (0,0,0). In this time period, the voltage inputs are divided by the sensitivity of the gyroscope (500°/s) to give actual angle values. The average of all values obtained in the three second period is taken into consideration. Hence, the device should be kept stationary for the first 5–10 s.
3.6. Obtaining the Output
For the final input (dynamic) of the MPU 6050, the accelerometer readings are taken into consideration. These readings are divided by the sensitivity of the accelerometer (65.5 LSB/°/s). As the roll, pitch, and yaw are considered in the accelerometer, the angular values have to be converted to regular rectangular coordinates from cylindrical coordinates.
3.7. Conversion of Voltages to Angular Readings
The MPU6050 sensor gives voltage (ADC) readings as their output, and we are supposed to convert them into regular coordinates. These numbers need to be divided by their LSB sensitivity, which is determined by registers 27 (GYRO CONFIG) and 28 (ACCEL CONFIG), respectively, and its third and fourth bit components.
Table 1 shows sensitivity table for gyroscope (left) and accelerometer (right) [
7].
3.8. Stabilization
Once the gyroscope and accelerometer values have been converted to angular readings, they have to be assessed to determine the movement received by the user towards the rear end of the spoon. As the accelerometer works in a cylindrical coordinate system, it is important to convert our values to the cartesian system before applying them to the stabilization process. In the cylindrical system, the roll, pitch, and yaw calculated by the system are considered while converting the values using the equations depicted below.
where
accX,
accY, and
accZ represent the accelerometer’s raw angular measurements after conversion. Once we obtain our final angular readings, we can set our servo motor ‘
X’ and ‘
Y’ accordingly with the respective value + 90° (initial).
This is repeated continuously in a loop.
4. Real Instrument
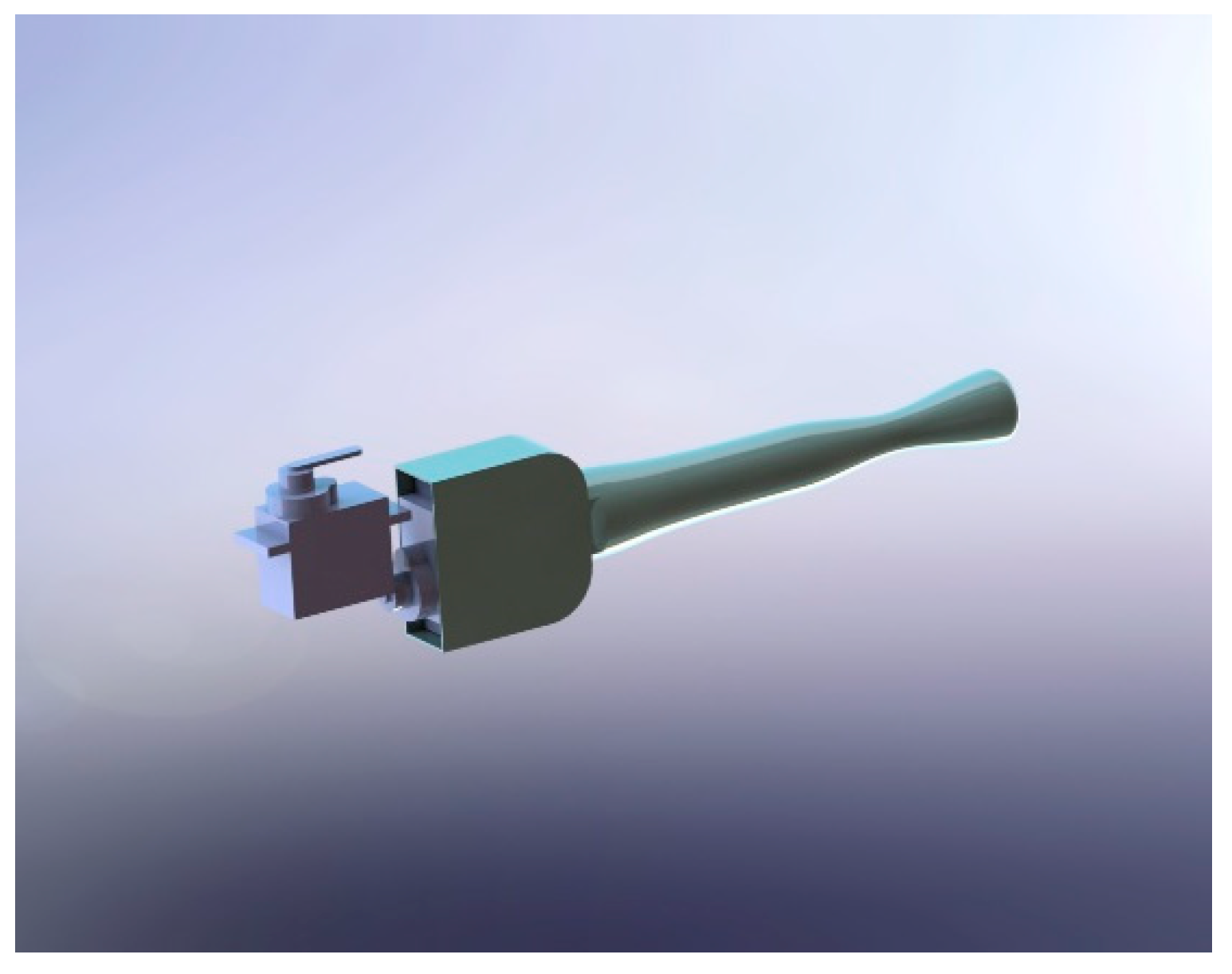
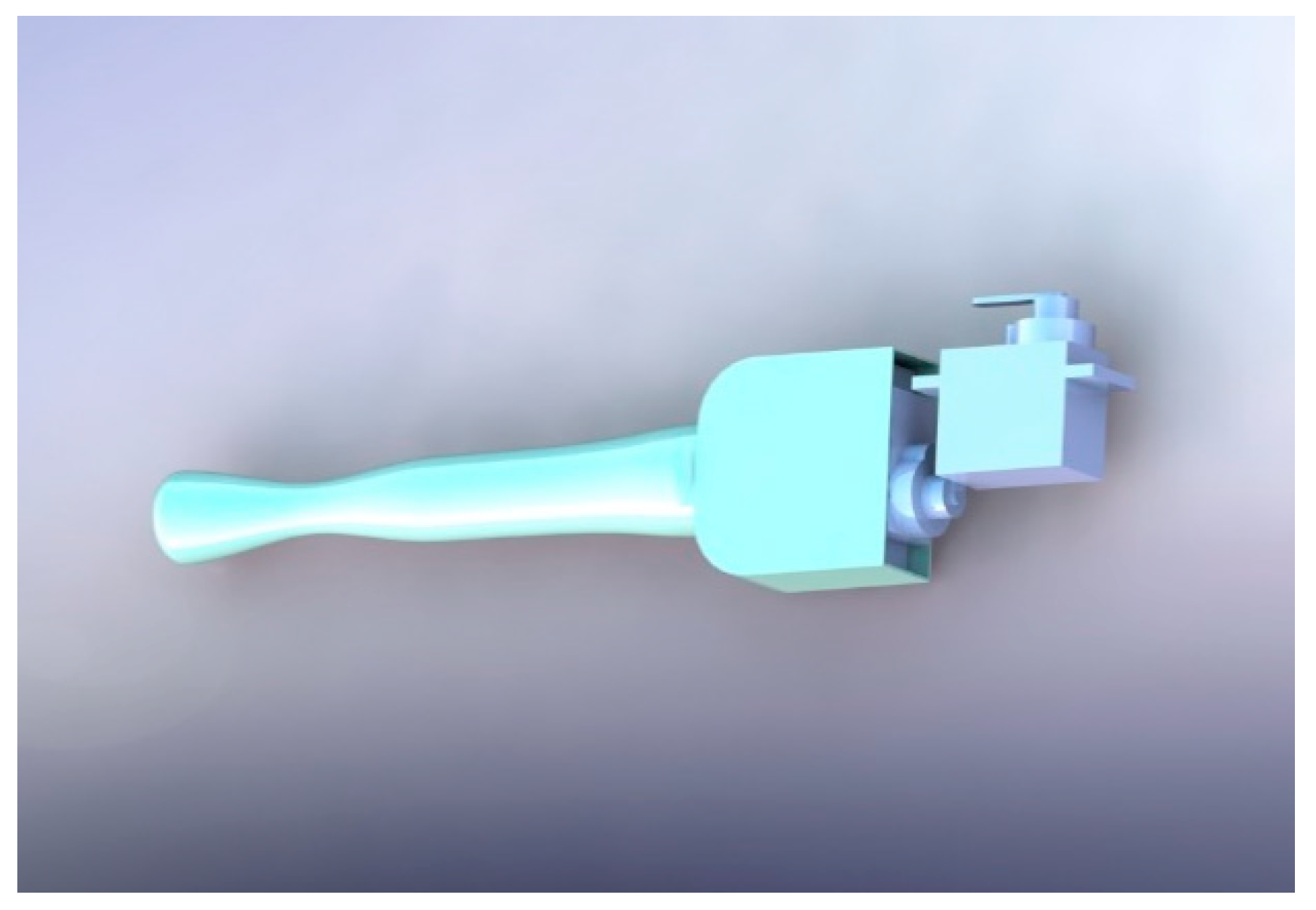
The prototype was redesigned as a genuine hardware tool with a 3D printed plastic shell with all PCBs and sensors drilled within, and this concept was created and simulated using SolidWorks. The sensor would be placed inside the handle, while the motors would be cased towards the front, just behind the spoon bowl.
Figure 5,
Figure 6 and
Figure 7 contain a design-based visualization and vision of what a real instrument could look and feel like.
5. Conclusions
Patients’ lives are profoundly impacted by Parkinson’s disease on more than just a physical level. The mental toll of constantly needing assistance from others in daily activities is unfathomable. The constructed prototype produced results that were satisfactory and has the potential to improve the quality of life of these individuals with functional impairments. Patients with severe cerebral palsy or other neurodegenerative disorders can also benefit from the device’s applications.
If the prototype is to be considered useful for those with high-frequency tremors, it needs to be modified and has some space for improvement. There are no issues with the algorithm; the servo motors (SG90) are simply too sluggish to calibrate faster tremors. Though those with limited motor limitations may find the item useful in its current configuration, in actual use, a more sophisticated motor like the MG90s or a separate DC motor would most likely be more efficient.
Author Contributions
Conceptualization, C.C. and V.V.H.; methodology, C.C.; software, V.V.H.; validation, C.C.; V.V.H. and A.G.; formal analysis, V.V.H.; investigation, V.V.H.; resources, C.C.; data curation, V.V.H.; writing—original draft preparation, C.C.; writing—review and editing, V.V.H.; visualization, V.V.H.; supervision, A.G.; project administration, A.G. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Pathak, A. Stabilizing Unintentional Muscle Movements. U.S. Patent No. 9,925,034, 27 March 2018. [Google Scholar]
- Jaswanth, D.K.; Lenord, C.; Pavan, S.L.; Nagaraju, C. Self-Stabilizing Spoon for Parkinson’s Ailment. Int. J. Eng. Manuf. 2020, 10, 38. [Google Scholar]
- Turgeon, P.; Laliberté, T.; Routhier, F.; Campeau-Lecours, A. Preliminary design of an active stabilization assistive eating device for people living with movement disorders. In Proceedings of the 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), Toronto, ON, Canada, 24–28 June 2019. [Google Scholar]
- Abrahamsson, J.; Danmo, J. The Stabilizing Spoon: Self-Stabilizing Utensil to Help People with Impaired Motor Skills. 2017. Available online: https://www.diva-portal.org/smash/record.jsf?pid=diva2:1200521 (accessed on 14 January 2023).
- Ripin, Z.M.; Chan, P.Y.; Alisah, I. Preliminary Evaluation of Active Tremor Cancellation Spoon for Patients with Hand Tremor. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2020; Volume 815. [Google Scholar]
- Chowdhury, D.; Sahu, S.; Chattopadhyay, M. Development of MEMS Accelerometer based Hand Tremor Stabilization Platform. Int. J. Biotechnol. Biomed. Sci. 2016, 2, 142–145. [Google Scholar]
- Invensense.com. Mpu6050 Datasheet. 2015. Available online: https://invensense.tdk.com/wp-content/uploads/2015/02/MPU-6000-Datasheet1.pdf (accessed on 14 March 2023).
- Fedorov, D.S.; Ivoilov, A.Y.; Zhmud, V.A.; Trubin, V.G. Using of measuring system MPU6050 for the determination of the angular velocities and linear accelerations. Autom. Softw. Enginery 2015, 11, 75–80. [Google Scholar]
- Liftware.com. 2020. Available online: https://www.liftware.com/steady/ (accessed on 12 February 2023).
- Gyenno.com. Gyenno Spoon. 2020. Available online: https://www.gyenno.com/spoon-en (accessed on 12 February 2023).
- Nazrin, A.; Abdulla, R.; San, L.Y. A low cost stabilizing spoon for people with parkinson’s disease. J. Appl. Technol. Innov. 2021, 5, 32. [Google Scholar]
- Sarkar, N.; Zheng, Z.K. Design and validation of a tremor stabilizing handle for patients with parkinson disease and essential tremor. In Digital Human Modeling and Applications in Health, Safety, Ergonomics and Risk Management. Healthcare Applications: 10th International Conference, DHM 2019, Held as Part of the 21st HCI International Conference, HCII 2019, Orlando, FL, USA, July 26–31, 2019, Proceedings, Part II 21; Springer International Publishing: Berlin/Heidelberg, Germany, 2019; pp. 274–283. [Google Scholar]
- Fujikawa, J.; Morigaki, R.; Yamamoto, N.; Nakanishi, H.; Oda, T.; Izumi, Y.; Takagi, Y. Diagnosis and Treatment of Tremor in Parkinson’s Disease Using Mechanical Devices. Life 2022, 13, 78. [Google Scholar] [CrossRef] [PubMed]
- Al-Ayyad, M.; Owida, H.A.; Al-Ghraibah, A.; Abdullah, M.R. Smart Assistive Spoon for people with Parkinson’s Disease. In Proceedings of the 2022 13th International Conference on Information and Communication Systems (ICICS), Irbid, Jordan, 21–23 June 2022; pp. 422–425. [Google Scholar]
- Taşar, B.; Tatar, A.B.; Tanyıldızı, A.K.; Yakut, O. FiMec tremor stabilization spoon: Design and active stabilization control of two DoF robotic eating devices for hand tremor patients. Med. Biol. Eng. Comput. 2023, 61, 2757–2768. [Google Scholar] [CrossRef] [PubMed]
- Jeon, H.; Lee, W.; Park, H.; Lee, H.J.; Kim, S.K.; Kim, H.B.; Jeon, B.; Park, K.S. Automatic classification of tremor severity in Parkinson’s disease using a wearable device. Sensors 2017, 17, 2067. [Google Scholar] [CrossRef] [PubMed]
- Hssayeni, M.D.; Jimenez-Shahed, J.; Burack, M.A.; Ghoraani, B. Wearable sensors for estimation of parkinsonian tremor severity during free body movements. Sensors 2019, 19, 4215. [Google Scholar] [CrossRef] [PubMed]
- Sigcha, L.; Pavón, I.; Costa, N.; Costa, S.; Gago, M.; Arezes, P.; López, J.M.; De Arcas, G. Automatic resting tremor assessment in parkinson’s disease using smartwatches and multitask convolutional neural networks. Sensors 2021, 21, 291. [Google Scholar] [CrossRef] [PubMed]
- Ranjan, R.; Bhushan, B.; Palaniswami, M.; Verma, A. A convolutional neural network approach for quantification of tremor severity in neurological movement disorders. In Intelligent Systems and Applications: Proceedings of the 2020 Intelligent Systems Conference (IntelliSys) Volume 3; Springer International Publishing: Berlin/Heidelberg, Germany, 2021; pp. 416–429. [Google Scholar]
- Vescio, B.; Quattrone, A.; Nisticò, R.; Crasà, M.; Quattrone, A. Wearable devices for assessment of tremor. Front. Neurol. 2021, 12, 680011. [Google Scholar] [CrossRef] [PubMed]
- Mo, J.; Priefer, R. Medical devices for tremor suppression: Current status and future directions. Biosensors 2021, 11, 99. [Google Scholar] [CrossRef] [PubMed]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}