Abstract
Future air mobility will consist of increased unmanned aerial vehicle (UAV) traffic operating in urban areas. Currently, the lower airspace in these environments is mainly used by traffic operating under visual flight rules, particularly helicopters in emergency medical services (HEMS). In the presented work, we analyze urban HEMS missions with automatic dependent surveillance-broadcast (ADS-B) data to identify the potential benefits to support UAV traffic management (UTM). In our methodology, we first restrict an existing HEMS ADS-B data set to a specific city and then further process it to extract the valid HEMS flights. Because no other mission information is available, we apply rule-based algorithms to define different helicopter flight segments and characterize specific HEMS mission segments. The resulting data set is analyzed to extract the characteristic information about the HEMS traffic within the city. The methodology is applied to the ADS-B HEMS flight data in the area of Berlin. The results show that the HEMS and flight segments can be identified robustly, and specific flight patterns are characteristic for them. Based on the results of this analysis, UAV traffic alert strategies are proposed to demonstrate the potential benefit of integrating ADS-B data statistics for UTM.
1. Introduction
The number of UAVs has doubled in Germany since 2015 and is predicted to continue its growth in the future. While the consumer market is saturated, the number of UAVs in the commercial sector is predicted to triple from 2020 to 2025 [1]. Most small UAVs will operate in low-level airspace where manned traffic can be encountered. Since 1997, there have been 16 confirmed and 11 suspected mid-air collisions between UAVs and manned aircraft worldwide that resulted in damaged or destroyed aircraft. The increasing usage of UAVs correlates with the reported encounters and sightings of UAVs by manned aircraft [2]. Due to their small size, UAVs can hardly be detected by pilots of manned aircraft which is why the see and avoid principle, used under visual flight rules, is not applicable. As a result, regulators require small UAVs in low-level airspace to avoid manned traffic at all times in order to mitigate the risk of mid-air collisions [3].
For the safe integration of small UAVs in the airspace, the European Union Aviation Safety Agency (EASA) is implementing the U-Space [4]. The U-Space will enable UAV operations in urban areas, where manned traffic, especially in the form of HEMS missions, can be encountered. In recent years, the German HEMS operator ADAC Luftrettung gGmbH (ADAC) has seen an increase in the number of rescue missions. While around 35,000 missions were flown in 2005, this number rose to over 50,000 in 2021 [5]. Berlin recorded the highest number of 2195 missions in 2021, which corresponds to about six flown rescue missions per day [6]. This trend of increasing HEMS missions is also observed in other countries, such as the USA and Japan [7]. HEMS missions are of an unscheduled nature with unknown landing sites and high time criticality. Therefore, dynamic airspace closures for UAVs in the event of an HEMS flight are to be implemented in the U-Space. However, detailed guidance on how this rule set might look has not been proposed yet [8]. As a starting point, the U-Space regulation requires all manned aircraft operating in the U-Space to make itself electronically conspicuous by regularly transmitting position information (e.g., ADS-B) [9].
In the literature, there have been some advances to research the conflicts of helicopters and UAVs as well as possible mitigation strategies. In the whitepaper of the project Air2X, the authors focus on necessary technologies, such as 5G, for HEMS helicopters to communicate with other civil domains, e.g., when landing on a highway during a rescue operation [10]. A co-existence of UAVs and HEMS helicopters in lower airspace is anticipated, but the possible benefits of flight data integration are not further analyzed. Ref. [11] developed a concept to support disaster relief through UTM with an interface to connect manned aviation and UTM services. The conducted flight tests showed that it is possible to coordinate and deconflict HEMS operations and UAVs when the necessary technology interfaces are installed [11]. Ref. [12] developed an encounter model for HEMS helicopters using the data of an HEMS operator in Massachusetts and derived a near mid-air collision risk. Based on this risk, a clear definition of a hockey puck shape with a horizontal separation of 2000 ft and a vertical separation of 250 ft for small UAVs was proposed [12]. There have also been studies with a focus on the analysis of helicopter ADS-B data. Ref. [13] identified helicopter flight phases for anomaly detection [13] and applied clustering methods on the ADS-B data of a helicopter air taxi operator [14]. Ref. [15] analyzed helicopter flight regimes in ADS-B data as well [15]. Currently, there is no literature that analyzes the specific characteristics of urban HEMS missions from ADS-B data, considering possible UAV traffic conflicts.
Therefore, this paper proposes a methodology for the analysis of urban HEMS missions to define the potential implications on UAV traffic management. As the main research question, we analyze if HEMS flights can be characterized with ADS-B data and support UTM strategies. The derived methodology for the HEMS flight analysis is described in detail in Section 2. For the application, the urban area of Berlin is chosen, and the extracted information is presented. In Section 3, a UAV traffic alert strategy is proposed that uses the analysis results. This paper concludes with a discussion of the overall approach and findings in Section 4 and a summary in Section 5.
2. Analysis of Urban HEMS flights
The overall goal of the analysis of urban HEMS flights is to describe the patterns in this specific mission type with its implications on traffic conflicts. As a data source, the ADS-B data from the OpenSky Network are used, which are extracted from a larger data set of German HEMS flights covering the years 2017 to 2021 [16,17]. In Germany, a large network of more than 70 HEMS station locations exists, each hosting operations of one or multiple helicopters with the callsign Christoph [7,18]. Mostly, (Airbus EC135/ H135)-type helicopters are used for the main mission type of primary rescue transport [7]. For the extraction of HEMS flights from the OpenSky Network, the ICAO 24-bit aircraft address (ICAO24 identifier) has been used, as other filter features have shown to be unreliable. In addition to the research of the ICAO24 identifiers of German HEMS helicopters, the information of all German HEMS stations and hospital heliports in Germany is used for a further analysis [19]. More information on the extraction of the raw data set and HEMS flights can be found in [17].
2.1. Processing and Analysis Methodology
In a first step, a circular geofence is defined with appropriate size to cover the mission area of the city of interest and extract relevant HEMS flights that passed through the area. Although flight IDs are given in the data, they are not accurately assigned to each individual HEMS flight and new IDs were assigned based on the given timestamps. Only complete flights without missing data points are of interest; flights with less than 120 data points and a maximum time delta of 10 s between data points are filtered out. Outlier data points, with unrealistic measurement values, showing an altitude >10,000 ft or > 180 kts (max. indicated airspeed of from an Airbus H135 helicopter + 30 kts of plausible wind velocity) are removed as well. For the aggregation of the flight data, the geofence area is divided into indexed hexagonal cells using the Uber H3 definition system at an appropriate size level [20]. Additionally, elevation data are added with the EU-DEM v1.0 digital surface model provided by the Copernicus program [21].
With the cleaned data set, the data points are classified on three different layers: flight class, HEMS segment and flight segment. The flight class is defined according to the start and end location of each flight in relation to the geofence: inbound (outside -> inside), outbound (inside -> outside), within area (inside -> inside) and transit (outside -> outside).
An HEMS mission can be divided into typical HEMS segments: to patient, to hospital or station and between hospitals and stations. To identify these segments, the takeoff and landing locations are associated with known hospital (Ho.) and HEMS station locations (St.), provided as points of interest (POI) by the Federal Agency for Cartography and Geodesy of Germany [19]. Around each POI, a buffer zone is defined and the first and last data point of each flight are defining whether a flight was associated with this POI. All unknown locations (Un.) are considered to be the location of a patient. With this classification, there are nine possible combinations of start and end locations that can be summarized: St./Ho. -> Patient, Patient -> St./Ho., Ho. -> St./Ho. and, vice versa, St. -> St. and Un. -> Un.
Finally, the flights are divided into the three main flight segments: takeoff, cruise and landing. For this, the altitude () data are smoothed with a moving average and the rate of climb () is calculated. The altitude data provide pressure altitude information. Without the actual mean sea-level pressure setting (QNH), it is not possible to derive the actual flight height above ground. Therefore, only altitude differences are taken into account. A rule-based logic for the definition of the segments is developed, considering the current , ground speed (), as well as the maximum altitude of the flight profile. The logic can be applied in the analysis but would need to be adapted in a live traffic strategy, accounting for additional data, such as wind speed and pressure settings.
With the processed data set, the HEMS flights can be analyzed in terms of spatial characteristics within the urban area (e.g., per hexagonal grid cell). Furthermore, it is possible to study specific features of the different flight and HEMS segments.
2.2. Application and Results
The presented approach is applied to the urban environment of the German capital Berlin as a use case city. The main HEMS station in Berlin is the Christoph 31 Airbus H135 helicopter located at the university hospital Charité Berlin, Campus Benjamin Franklin. It is operated by the ADAC Luftrettung gGmbH and has the highest number of HEMS missions per year in Germany [6]. A geofence with a 30 km radius is defined around the Berlin city center at 52 31 12 N, 13 24 18 E. All the other preprocessing steps are performed as described in Section 2.1.
The geofenced data set originally contained 2,150,329 measurements and 3347 identified individual flights. After the assignment of new flight IDs and the filtering process, 1,250,248 data points (%) remain, with 3274 identified flights. The final data set contains measurements from seven different HEMS helicopters with 2722 flight IDs belonging to the helicopter registration D-HXCB that operated the Christoph 31 station for most of 2021.
The flight classes of all the flights are determined: 2865 are classified as within area (%), 196 outbound, 199 inbound and 14 as transit. As most flights stay within the geofence area, the chosen geofence radius is considered appropriate. Furthermore, all the flights are divided into the described flight segments, with 2774 flights (%) consisting of all three segments.
In Figure 1, an overview of the geofenced Berlin area is shown. The urban area is divided into 607 hexagonal cells with the level 7 Uber H3 grid. There are a total of 19 helipads at hospitals or HEMS stations, with the main HEMS station at the Charité located in the southwest of the city center. The sizes of the buffer zones for each POI are defined after a manual data analysis of the probable takeoffs and landings at these locations.
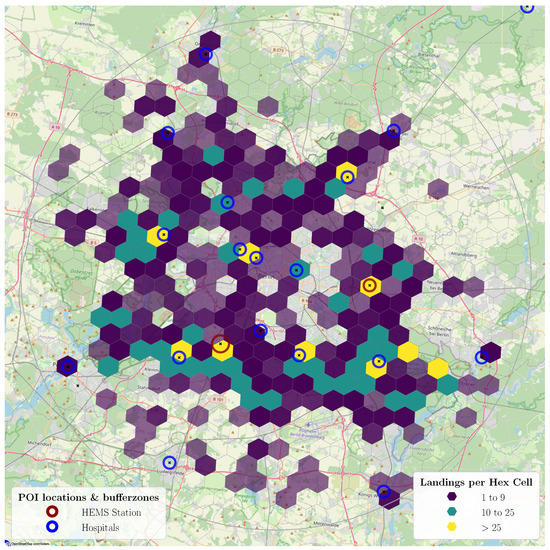
Figure 1.
Map of the urban area of Berlin with known helipad locations (POIs) and color-coded number of landings per hexagonal grid cell.
The map shows that the landings are concentrated at known hospitals (yellow) and in the outer districts of Berlin. As one main objective of the HEMS missions is the transport of emergency doctors to patients, one possible explanation for the distribution could be that in the outer districts, regular ambulances cannot get to the emergency scene fast enough.
With the shown buffer zones, all the flights within area are classified into the HEMS segments. The results are verified with random samples and appear plausible with the manual sizing of the buffer zones, which mainly depend on the ADS-B coverage quality. Only a few takeoffs and landings can be tracked directly on the ground and nearby the helipads, which is why a manual setting of the radius has to account for some distance between the first and last measurements and the POI location. In Figure 2, an example HEMS mission, consisting of two flight legs (to the patient and back to the hospital), is illustrated with information of the classified flight segments with the typical patterns, HEMS segments, POIs and landing area.
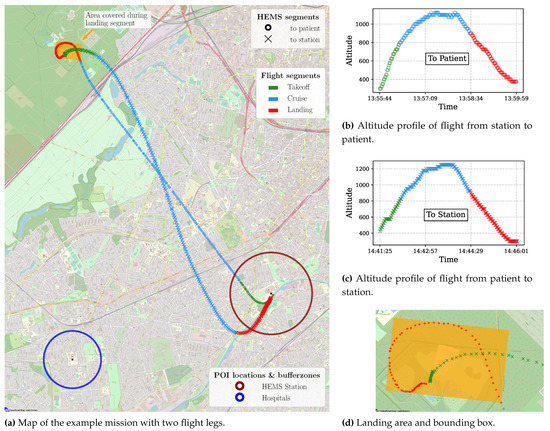
Figure 2.
Example flight consisting of two HEMS segments (altitude profiles with associated altitude profiles and landing area.
For each identified flight segment, several analyses have been conducted to understand the HEMS operations in more depth. Of particular interest are the duration and ground speeds in each flight phase and the changes in the track. The ground speed did not vary significantly for the different HEMS segments. During takeoff, the median ground speed is , during cruise and during landing . A summary of the other statistics for the different HEMS and flight segments is given in Table 1.

Table 1.
Statistics that showed significant differences for HEMS (Station—St., Hospital—Ho., Unknown—Un.) and flight segments (Takeoff—TO, Cruise—CR, Landing—LA): median duration , median of the track standard deviation of each flight and covered landing area A.
The longest flights are from station to station. These flights were examined and are characterized as aborted missions, where the HEMS helicopters fly to an emergency scene but return to their station during the cruise. This can also be observed in the high track changes, as the helicopters turn approximately 180 during the abort. During flights with a known landing location (at a hospital or station), the track varies only insignificantly during the cruise phase with . The mainly straight flight path can be examined in Figure 2a. As the station helipad is best known by the pilots and has defined departure tracks, the takeoff time is considerably shorter than for other HEMS segments.
For flights to emergency scenes, the landing time of 74 s is considerably longer than for return flights to hospitals. The analysis of the landings at unknown locations revealed a characteristic circling pattern, where the pilot examines the landing site. This characteristic is also reflected in the track changes at unknown landing locations, which are significantly higher than at known locations with . To gain further intuition of the overflown area during the landing segment, which could lead to necessary warning areas for UAV pilots, a bounding box for each landing segment with its associated area is calculated. At emergency scenes, the landing segment covers a median area of . This area and the typical circling pattern can be seen in Figure 2d.
In order to aggregate the flights into missions with several flight legs, the distance of the start and end locations of consecutive flights in the data set as well as their time difference are analyzed. For this analysis, only 2766 flights are considered, which operated within area and included all three flight segments. In total, this results in 818 missions containing only one flight, 626 missions with two flight legs (1252 flights), 178 missions with three flight legs (534 flights), 23 missions with four flight legs and 6 missions with five flight legs. Even though many missions are aggregated correctly, the number of missions with only one flight leg is too high. It includes all the flights that may have been patient transports from one hospital to other hospitals, as well as aborted missions, but also flights where preceding or consecutive flights were filtered out because of their data quality.
After the assignment of the missions, the corresponding ground times at emergency scenes are calculated with the time difference between the consecutive flights within the mission and at unknown landing locations. During this time, the helicopter does not send any ADS-B information and UAV operators would not be informed of ongoing rescue missions. The average ground time at an emergency location in the data set is calculated to be 34 min and 33 s, with a standard deviation of 14 min and 31 s and a maximum time at an emergency scene of 113 min and 19 s. In Figure 2b,c the ground time is ca. 41 min, which can be observed with the timestamp delta between the flights.
Because small UAVs are currently only allowed to operate below an altitude of 120 m above ground level, all the flight profiles are further examined in relation to this threshold. As the flight data do not contain height-above-ground-level information, the altitude difference from the first observed data point is used. During the takeoff segment, the time to climb 120 m after the first observed data point took an average of s () with an average traveled distance of 1039 m (). During the cruise segment, the average altitude difference to the first observed data point of the flight was approximately 560 ft () and a median of 575 ft, showing the low-altitude operation of the HEMS missions. Of the cruise data points available, % are higher than 120 m above the first available data point. It can therefore not be assumed that the cruise phase of every mission will always be above 120 m ground level. During landing, the HEMS helicopters fly for a median time of 47 s below the threshold altitude when landing at a helipad or station and 71 s when landing in an unknown spot. Respectively, the distance below the threshold is 716 m for a helipad/station approach and 575 m for an unknown landing area. Figure 2 explains this observation. The landing at the unknown location shows a circular approach segment while the approach to the hospital is on a more direct trajectory, resulting in the differences in duration and distances.
3. Proposed Separation Strategy
The analysis of urban HEMS missions from Section 2.2 builds the foundation to derive strategies to safely separate UAVs from HEMS helicopters. The proposed strategies are not complete and serve as an example of how an analysis of urban HEMS missions could benefit the UTM. The strategies are intended to be implemented in a future U-Space framework [22]. No-Fly-Zones (NFZ) are intended to provide separation and can be defined statically or dynamically (e.g., around a helicopter). To inform UAV pilots about an arriving helicopter, a caution volume is defined, covering a larger area than the NFZ. For the proposed concept, it is assumed that UAVs are capable of clearing the airspace within 60 s, following today’s operational requirements for UAVs [23].
As a first step in the separation strategy, the HEMS mission is identified as to patient or to St./Ho., based on the takeoff location. Next, the flight segments are identified during the flight. For each segment, individual separation strategies are proposed, consisting of an NFZ and a surrounding caution zone. For takeoffs from a helipad or station, a permanent NFZ should be applied, as already in use today. However, the size should be adjusted. Based on our analysis, the median area of the bounding box for the takeoff phase is ca. km2. To account for uncertainties, this size should be increased with a safety buffer. Although we identified prominent departure and arrival trajectories for some helipads or stations, it is difficult to predict the behavior of the helicopter without knowledge of the intended destination. That is why a static NFZ should be chosen for the takeoff segment. After takeoff, most missions consist of a straight cruise flight to the destination, with only a few track changes. During this cruise segment, an NFZ and caution area surrounding the helicopter are proposed to clear the airspace mainly ahead of the helicopter as a function of the ground speed. To account for unforeseen track changes, the zones can be considered as a combination of a cylinder and a cone with an opening angle. For the definition of the opening angle, the relative bearing between the starting point of the cruise segment and each following point can be calculated. To illustrate the approach, Figure 3 shows an example flight with the bearing arc. In this case, the maximum bearing is between the first cruise track and the last point in the cruise.
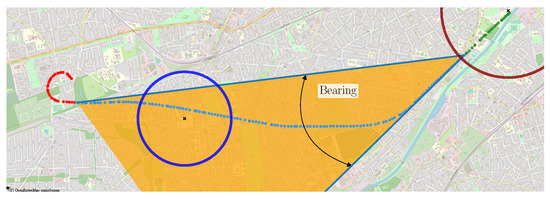
Figure 3.
Example flight with illustration of the bearing calculation.
In the case of the example flight, the maximum bearing is approximately 38°. This calculation could be performed for all the flights in the data set to receive a reliable estimation of a maximum opening angle of the cone. The length of the cone and cylinder is determined based on the current ground speed and the necessary clearing time of 60 s. With a ground speed of 110 kts, the zone has a length of ca. km.
As soon as the flight segment filter detects the landing segment of the mission, the area is scanned for known helipads/stations. If no known location can be detected, a cylindrical-shaped NFZ is established, similar to the takeoff phase. In our analysis, a median landing area of km2 was observed for the landing area with the typical circling pattern. As with the takeoff segment, a safety buffer should be applied to account for uncertainties. After a landing at an emergency location, the helicopter transponder will be shut off and the ADS-B signal is lost. The NFZ will remain at the last landing location until the takeoff of the helicopter is detected, because the duration of the ground operation can hardly be predicted. This assures that no UAVs will accidentally interfere with the takeoff of the HEMS helicopter.
4. Discussion
Applying the proposed filters reduced the amount of available data points by 42%, as shown in Section 2.2. This provided us with a clean, complete and logical data set. Many of the flights that were filtered out showed gaps in the recording of the data points. The splitting of the data into HEMS segments allows to differentiate between flights that are directed to an unknown location or a known helipad or station. The differences between the characteristics of the various segments have been described but require further analysis and verification. The algorithm to split the flight into segments was specifically developed for the use case city, Berlin. The first evaluations showed that a generally applicable, parameter-based definition of the boundaries between the flight segments is difficult.
In general, the HEMS missions seem to show an arc-shaped departure, a straight cruise and a circling landing phase. These patterns occur in many flights and might be used to predict the behavior of the helicopter with a certain reliability. However, the data also showed aborted flights where a sharp turn is flown to return to the departure point in low altitude without prior indication. This underlines the significant uncertainty in predicting the trajectory of HEMS flights, justified in their ad hoc and high-priority nature. The analysis of the cruise altitude showed that a significant number of flights fly below 120 m which means they could potentially be in conflict with UAVs during their mission. As a consequence, special separation methods are needed not only for takeoff and landing but for the entire HEMS mission. We therefore proposed a basic rule set to ensure the separation between UAVs and HEMS helicopters. While the static NFZ for takeoff and landing should provide sufficient separation, the flight segment filter mechanism needs to be tested to ensure there is enough time for UAVs to clear the area. Additionally, the proposed cone-shaped NFZ and caution area need to be defined in more detail. The strategy is not complete and is intended to apply our gained knowledge through the performed analysis and should be validated with detailed simulations. The strategy could be improved in terms of the airspace usage efficiency when having additional information about the HEMS mission, e.g., the intended destination. Such information is partially available today with systems such as rescuetrack [24] and might be available in the future for the purpose of traffic management.
5. Summary
In this paper, the potential of the ADS-B data from the OpenSky Network for a systematical characterization of HEMS flights performed over urban areas as an input to the design of future air mobility concepts is investigated. A methodology for how to analyze the flights is presented, consisting of geofencing, filtering and splitting into mission and flight segments. The following statistical analysis of the flight segments is then compared against the typical characteristics of UAV missions. A strategy is proposed, including which areas and time periods should be considered for NFZs or caution areas when an HEMS flight is detected, based on its respective flight segment and ground speed. A key requirement to apply a live ADS-B data-based separation strategy is that all airspace participants send the ADS-B data reliably and enough ADS-B receivers are available to receive all the signals. Although this strategy is only a starting point for the future research of urban airspace design, the general approach of using statistics of historic ADS-B to derive an airspace avoidance strategy proved to be feasible and promising for future research.
Author Contributions
Conceptualization, D.H., M.B., J.K. and M.P.; methodology, D.H., M.B., J.K. and M.P.; software, D.H., J.K. and M.P.; formal analysis, D.H., J.K. and M.P.; investigation, D.H., J.K. and M.P.; data curation, D.H., J.K. and M.P.; writing, D.H., M.B., J.K. and M.P. All authors have read and agreed to the published version of the manuscript.
Funding
This research is part of: the smartHUMS research project funded by the Federal Aeronautical Research Programme of the German Federal Ministry for Economic Affairs and Climate Action (grant number 20D1918C), the DACUS Project which has received funding from the SESAR Joint Undertaking under the European Union’s Horizon 2020 research and innovation programme under grant agreement No 893864, the “KMU-Innovativ–SAMMIE: Design und Evaluation einer Mensch-Maschine-Schnittstelle für Drohnenpiloten” research project funded by the German Federal Ministry of Education and Research and has been co-funded by the LOEWE initiative (Hessen, Germany) within the emergenCITY center.
Data Availability Statement
The raw data used for this study are openly available in the TUdatalib repository at https://doi.org/10.48328/tudatalib-959 (accessed on 4 November 2022).
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| ADS-B | Automatic Dependent Surveillance-Broadcast |
| ALT | Altitude |
| HEMS | Helicopter Emergency Medical Service |
| NFZ | No-Fly-Zone |
| POI | Point of Interest |
| UAV | Unmanned Aerial Vehicle |
| UTM | UAV Traffic Management |
References
- Drone Industry Insights. Quantitative Analysis of the German Drone Market. 2021. Available online: https://www.verband-unbemannte-luftfahrt.de/wp-content/uploads/2021/05/VUL-Markststudie_2021_EN1.pdf (accessed on 14 December 2022).
- Aviation Safety Network. (Suspected) Drone Collisions with Aircraft. 2022. Available online: https://aviation-safety.net/database/issue/drones.php (accessed on 4 November 2022).
- European Commission. Commission Implementing Regulation (EU) 2019/947 of 24 May 2019 on the Rules and Procedures for the Operation of Unmanned Aircraft. 2019. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX%3A32019R0947 (accessed on 14 December 2022).
- European Commission. Commission Implementing Regulation (EU) 2021/664 of 22 April 2021 on a Regulatory Framework for the U-Space. 2021. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX%3A32021R0664&qid=1671025920575 (accessed on 14 December 2022).
- ADAC Luftrettung gGmbH. Einsätze der ADAC Rettungshubschrauber. 2018. Available online: https://luftrettung.adac.de/app/uploads/2018/11/Einsatzverlauf_1970_2016.pdf (accessed on 4 November 2022).
- ADAC Luftrettung gGmbH. Einsatzbilanz 2021: ADAC Luftrettung Fliegt 52.234 Einsätze. 2022. Available online: https://luftrettung.adac.de/einsatzbilanz-2021/ (accessed on 4 November 2022).
- Kessler, C. Helicopter emergency medical service: Motivation for focused research. CEAS Aeronaut. J. 2015, 6, 337–394. [Google Scholar] [CrossRef]
- Barrado, C.; Boyero, M.; Brucculeri, L.; Ferrara, G.; Hately, A.; Hullah, P.; Martin-Marrero, D.; Pastor, E.; Rushton, A.P.; Volkert, A. U-space concept of operations: A key enabler for opening airspace to emerging low-altitude operations. Aerospace 2020, 7, 24. [Google Scholar] [CrossRef]
- European Commission. Notice of Proposed Amendment 2021-14, Development of Acceptable Means of Compliance and Guidance Material to Support the U-Space Regulation. 2021. Available online: https://www.easa.europa.eu/en/downloads/134303/en (accessed on 14 December 2022).
- May, M.; Bargmann, M.; Fehr, B. Whitepaper—Augmented Helicopter Rescue Operation with Air2X and Virtual Infrastructure. Deutsches Zentrum für Luft- und Raumfahrt (DLR). Available online: https://elib.dlr.de/139188/ (accessed on 14 December 2022).
- Andreeva-Mori, A.; Kubo, D.; Kobayashi, K.; Okuno, Y.; Homola, J.R.; Johnson, M.; Kopardekar, P.H. Supporting Disaster Relief Operations through UTM: Operational Concept and Flight Tests of Unmanned and Manned Vehicles at a Disaster Drill. In Proceedings of the AIAA Scitech 2020 Forum, American Institute of Aeronautics and Astronautics, Orlando, FL, USA, 6–10 January 2020. [Google Scholar] [CrossRef]
- Weinert, A.; Campbell, S.; Vela, A.; Schuldt, D.; Kurucar, J. Well-clear recommendation for small unmanned aircraft systems based on unmitigated collision risk. J. Air Transp. 2018, 26, 113–122. [Google Scholar] [CrossRef]
- Chin, H.J.; Payan, A.; Johnson, C.; Mavris, D.N. Phases of flight identification for rotorcraft operations. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar]
- Chin, H.J.; Payan, A.P.; Mavris, D.; Johnson, C. Knowledge Discovery Within ADS-B Data from Routine Helicopter Tour Operations. In Proceedings of the AIAA AVIATION 2020 FORUM, Virtual Event, 15–19 June 2020. [Google Scholar]
- Hoole, J.; Booker, J.; Cooper, J. Helicopter Flight Manoeuvre Statistics via ADS-B: An Initial Investigation Using the OpenSky Network. In Proceedings of the The 9th OpenSky Symposium, Virtual Event, 18–19 November 2021. [Google Scholar] [CrossRef]
- Schäfer, M.; Strohmeier, M.; Lenders, V.; Martinovic, I.; Wilhelm, M. Bringing up OpenSky: A large-scale ADS-B sensor network for research IPSN-14. In Proceedings of the 13th international symposium on Information processing in sensor networks (IPSN ’14), Berlin, Germany, 15–17 April 2014. [Google Scholar]
- Hünemohr, D. ADS-B Flight Data of German HEMS Helicopters (Airbus EC135) from 2017–2021. Available online: https://tudatalib.ulb.tu-darmstadt.de/handle/tudatalib/3587 (accessed on 16 December 2022).
- Martin, T. Aeromedical Transportation: A Clinical Guide, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2006. [Google Scholar]
- Bundesamt für Kartographie und Geodäsie. Points of Interest Open (POI-Open). 2022. Available online: https://gdz.bkg.bund.de/index.php/default/points-of-interest-open-poi-open.html (accessed on 4 November 2022).
- Uber Technologies, Inc. H3—Hexagonal Hierarchical Geospatial Indexing System. 2022. Available online: https://h3geo.org/ (accessed on 4 November 2022).
- Copernicus Programme. EU-DEM v1.0 Digital Surface Model. 2022. Available online: https://land.copernicus.eu/imagery-in-situ/eu-dem/eu-dem-v1-0-and-derived-products/eu-dem-v1.0 (accessed on 15 December 2022).
- SESAR Joint Undertaking. Supporting Safe and Secure Drone Operations in Europe: A Preliminary Summary of SESAR U-Space Research and Innovation Results (2017–2019); Publications Office: Luxembourg, 2020. [Google Scholar] [CrossRef]
- European Aviation Safety Agency. Executive Director Decision 2020/022/R of 15 December 2020. The Decision Provides AMC and GM to Implementing Regulation (EU) 2019/947 Part-UAS—Issue 1, Amendment 1. 2020. Available online: https://www.easa.europa.eu/en/downloads/121002/en (accessed on 14 December 2022).
- Rescuetrack GmbH. Rescuetrack. Available online: https://www.rescuetrack.de/de-de/ (accessed on 4 November 2022).



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).