
Reality Capture of Buildings Using 3D Laser Scanners





Abstract
1. Introduction
2. Related Studies
3. Materials and Methods
3.1. Systematic Review
3.2. Field Survey: Point Cloud Model Development
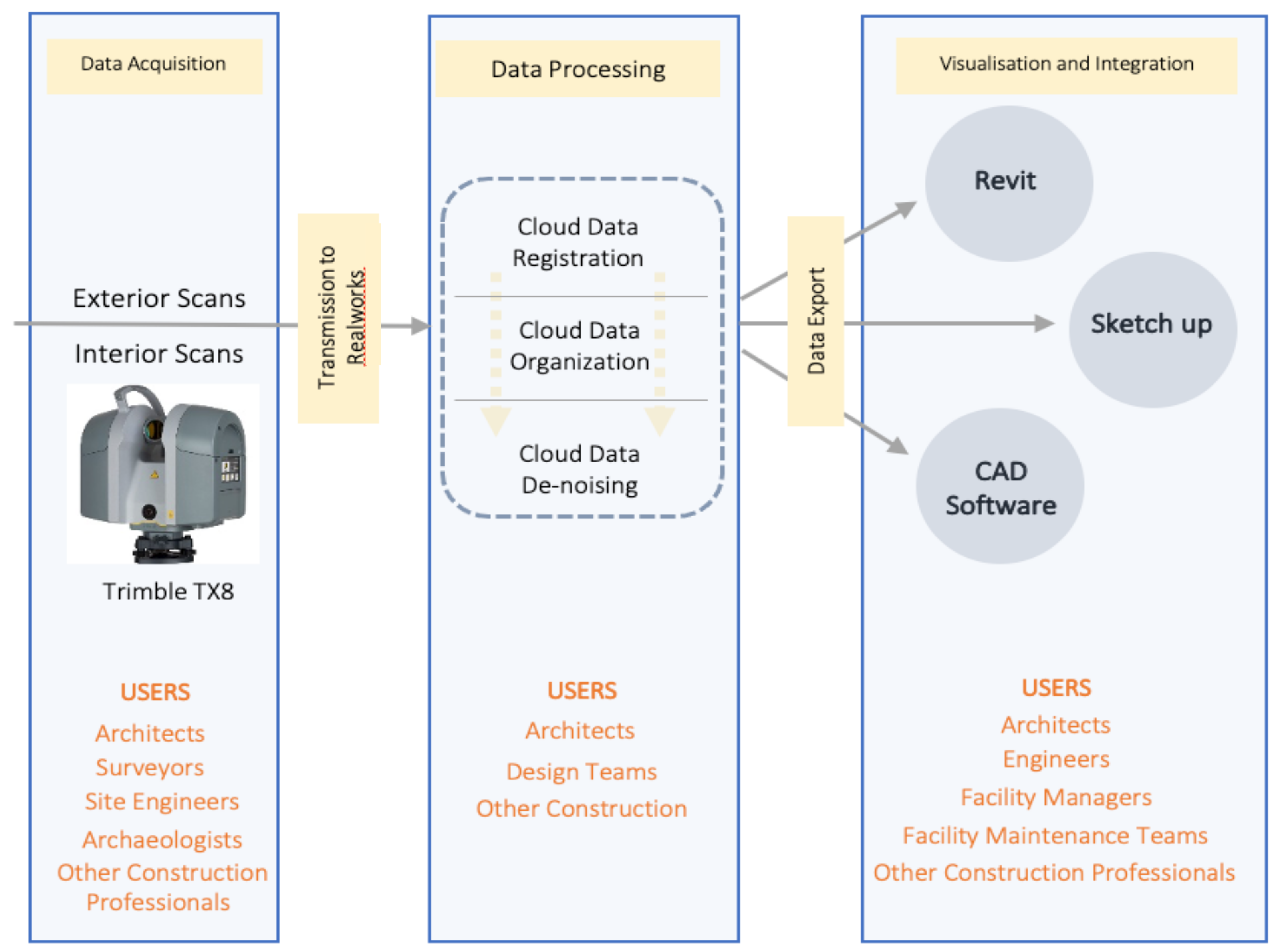
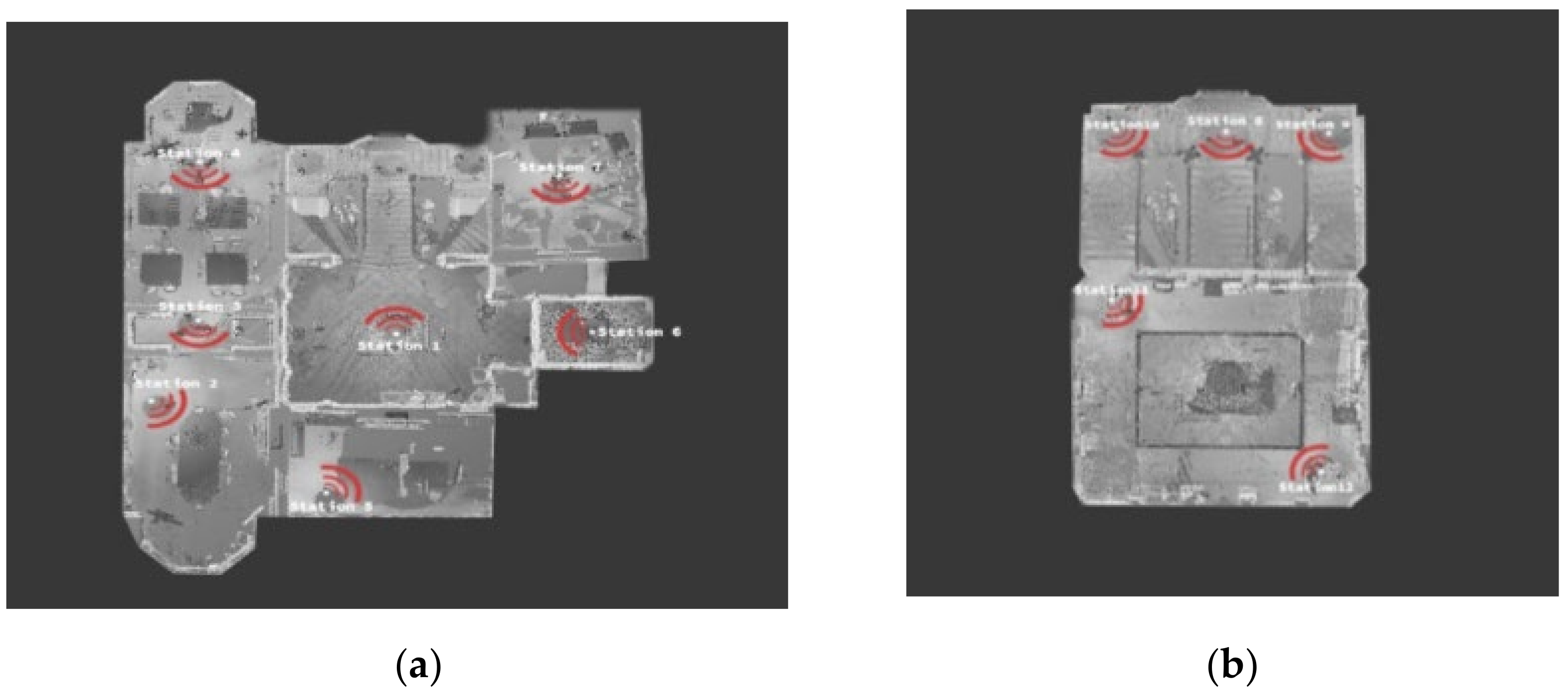
3.2.1. Data Acquisition
3.2.2. Exporting Scanning Data: Trimble TX8 to Trimble Realworks
3.2.3. Point Cloud Processing
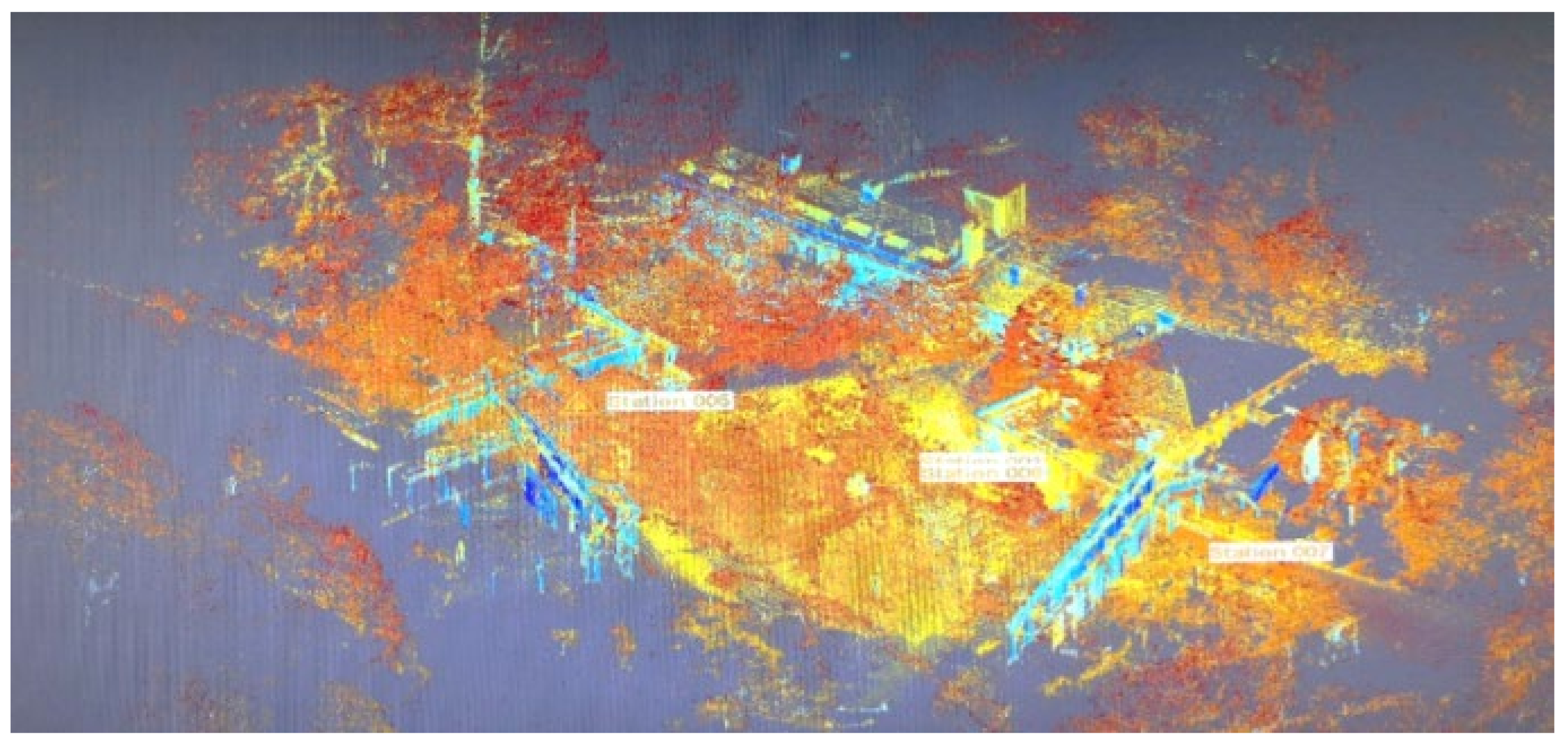
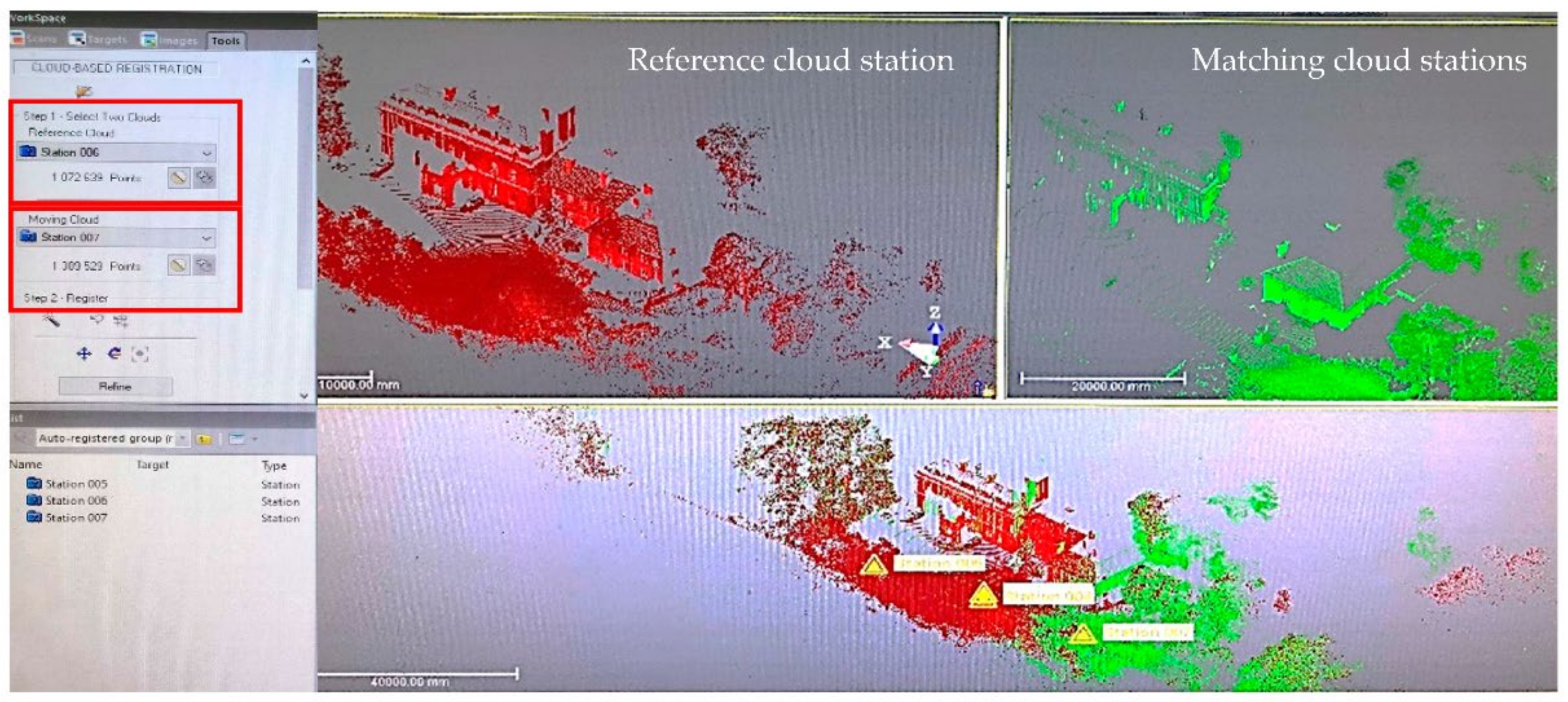
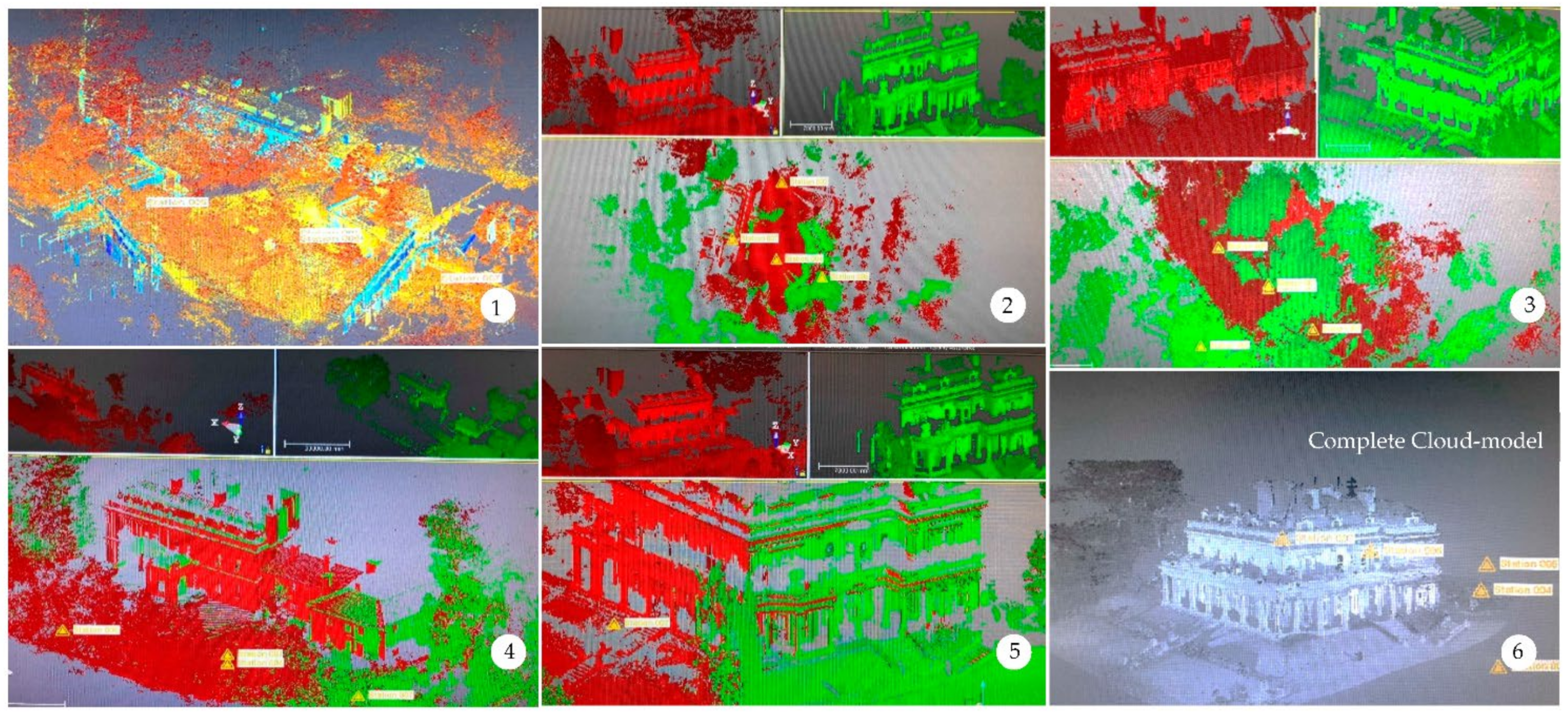
Point Cloud Registration
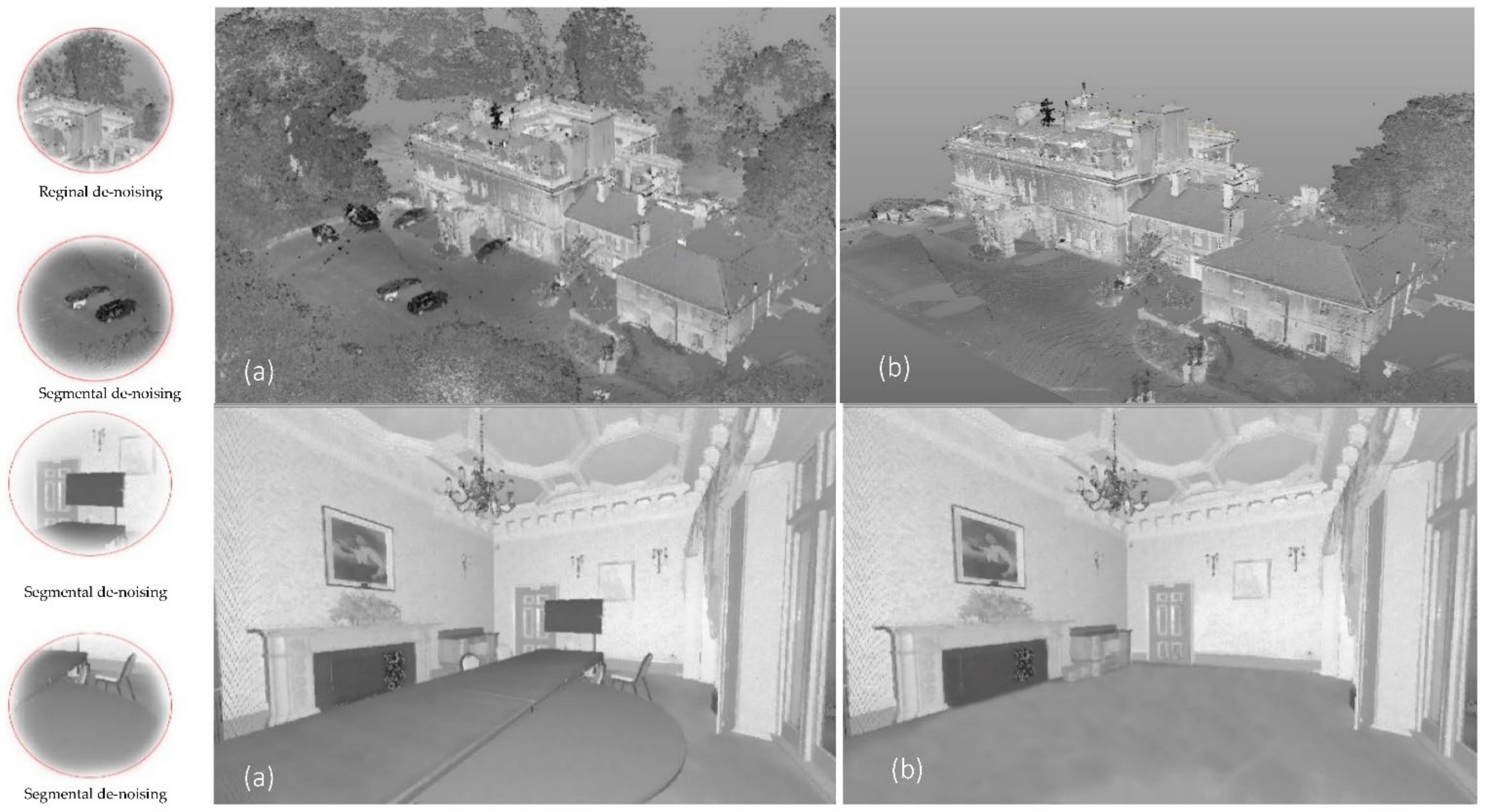
Point Cloud De-Noising
- Reduce cloud points through eliminating undesirable objects, neighboring buildings, and unrelated visual context to ease and reduce time required to process scanned clouds.
- Extract visual barriers overlaying building elevations, interior spaces, and surfaces to obtain a clear, functional field of view.
- Decrease cloud model complexity and focus on cloud model components.
- Regional de-noising: enables eliminating large areas such as surrounding environment and neighboring buildings.
- Segmental de-noising: enables eliminating single objects, undesirable existing elements on site, and visual barriers.
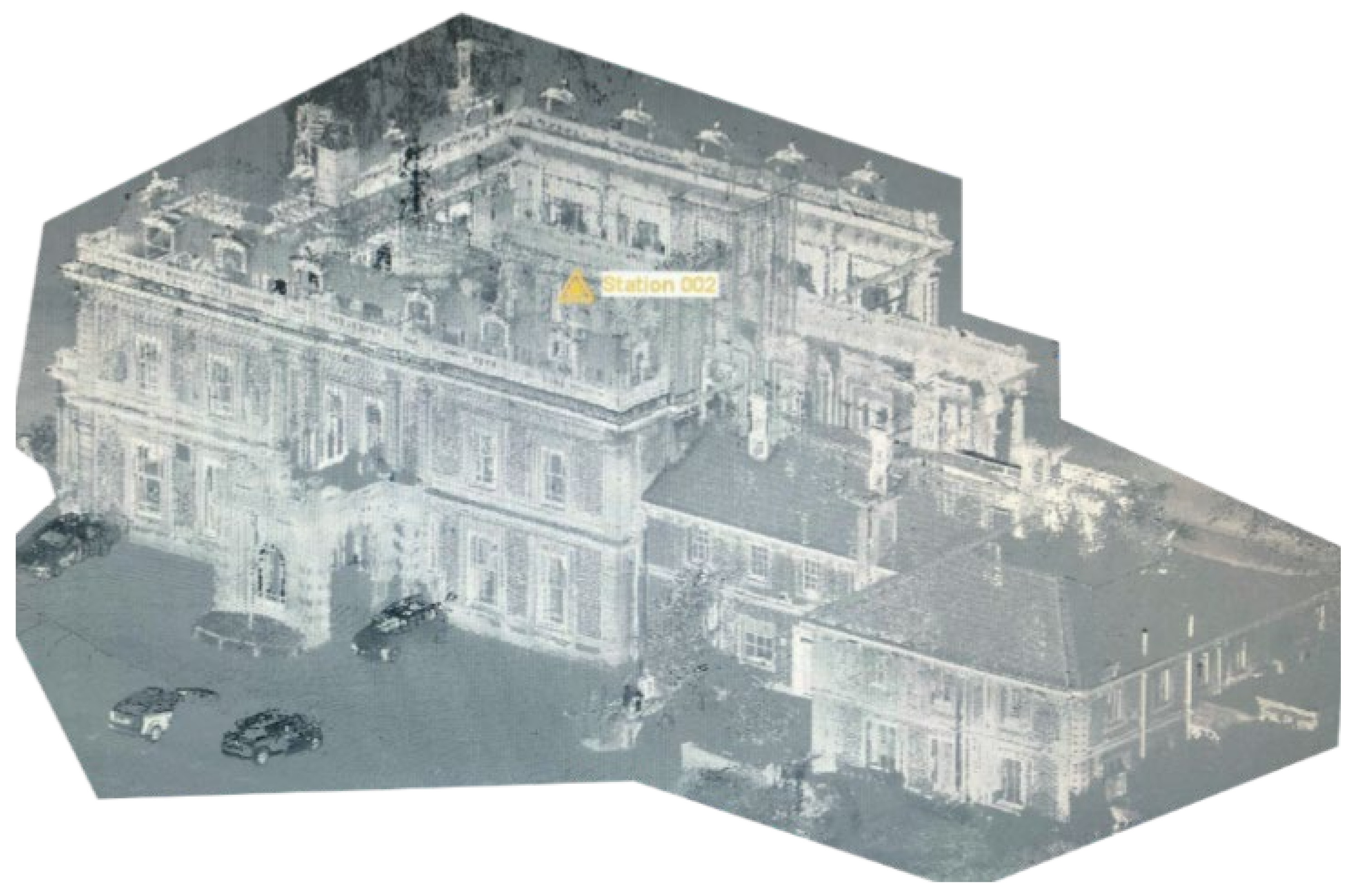
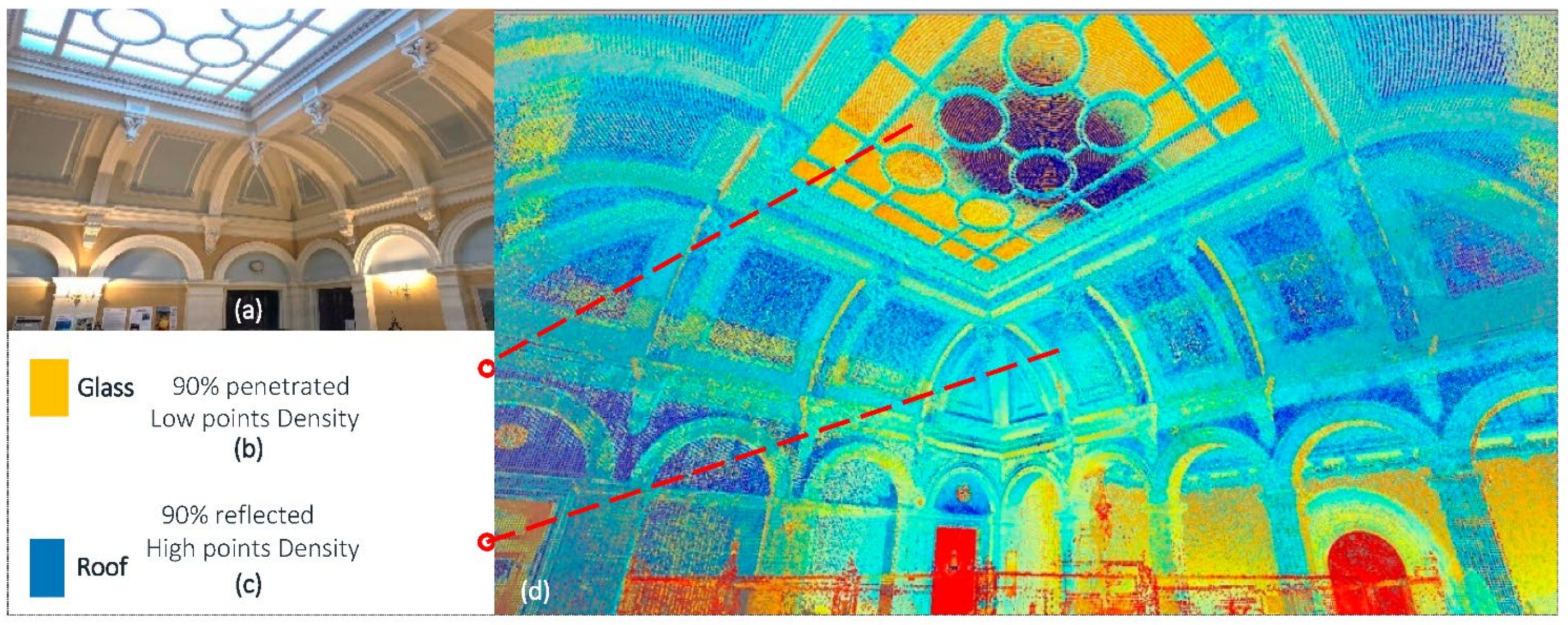
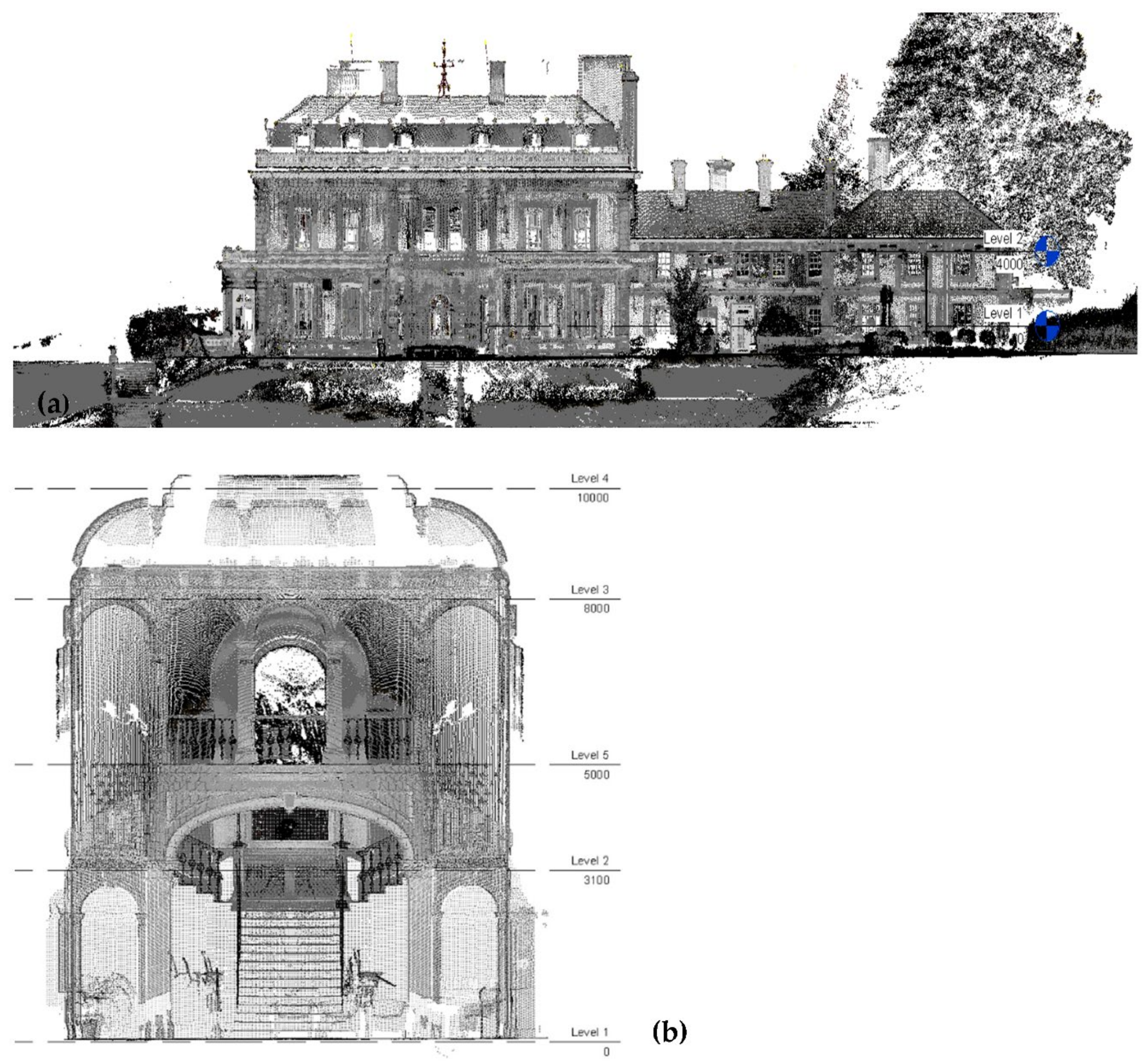
Point Cloud Investigation
3.3. Cloud Model Integration with BIM
- Built-in plugin: a plugin provided by Trimble Realworks that enables direct exportation of the cloud model to SketchUp software.
- Cloud export: a method that enables exporting the cloud model to other file formats which are compatible with various BIM software types.
4. Findings and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Larsen, J.K.; Shen, G.Q.; Lindhard, S.M.; Brunoe, T.D. Factors affecting schedule delay, cost overrun, and quality level in public construction projects. J. Manag. Eng. 2016, 32, 04015032. [Google Scholar] [CrossRef]
- Omar, H.; Mahdjoubi, L.; Kheder, G. Towards an automated photogrammetry-based approach for monitoring and controlling construction site activities. Comput. Ind. 2018, 98, 172–182. [Google Scholar] [CrossRef]
- Ham, Y.; Golparvar-Fard, M. Mapping actual thermal properties to building elements in gbXML-based BIM for reliable building energy performance modeling. Autom. Constr. 2015, 49, 214–224. [Google Scholar] [CrossRef]
- Rahimian, F.; Seyedzadeh, S.; Oliver, S.; Rodriguez, S.; Dawood, N. On-demand monitoring of construction projects through a game-like hybrid application of BIM and machine learning. Autom. Constr. 2020, 110, 103012. [Google Scholar] [CrossRef]
- Sanhudo, L.; Ramos, N.M.; Martins, J.P.; Almeida, R.M.; Barreira, E.; Simões, M.L.; Cardoso, V. A framework for in-situ geometric data acquisition using laser scanning for BIM modelling. J. Build. Eng. 2020, 28, 101073. [Google Scholar] [CrossRef]
- Rahimian, F.; Chavdarova, V.; Oliver, S.; Chamo, F.; Amobi, L. OpenBIM-Tango integrated virtual showroom for offsite manufactured production of self-build housing. Autom. Constr. 2019, 102, 1–16. [Google Scholar] [CrossRef]
- Lagüela, S.; Díaz-Vilariño, L.; Armesto, J.; Arias, P. Non-destructive approach for the generation and thermal characterization of an as-built BIM. Constr. Build. Mater. 2014, 51, 55–61. [Google Scholar] [CrossRef]
- Sanhudo, L.; Ramos, N.M.; Martins, J.P.; Almeida, R.M.; Barreira, E.; Simões, M.L.; Cardoso, V. Building information modeling for energy retrofitting—A review. Renew. Sustain. Energy Rev. 2018, 89, 249–260. [Google Scholar] [CrossRef]
- Shalabi, F.; Turkan, Y. IFC BIM-based facility management approach to optimize data collection for corrective maintenance. J. Perform. Constr. Facil. 2017, 31, 04016081. [Google Scholar] [CrossRef]
- Jalaei, F.; Zoghi, M.; Khoshand, A. Life cycle environmental impact assessment to manage and optimize construction waste using Building Information Modeling (BIM). Int. J. Constr. Manag. 2019, 1–18. [Google Scholar] [CrossRef]
- Wang, Q.; Kim, M.K. Applications of 3D point cloud data in the construction industry: A fifteen-year review from 2004 to 2018. Adv. Eng. Inform. 2019, 39, 306–319. [Google Scholar] [CrossRef]
- Chan, D.W.; Olawumi, T.O.; Ho, A.M. Perceived benefits of and barriers to Building Information Modelling (BIM) implementation in construction: The case of Hong Kong. J. Build. Eng. 2019, 25, 100764. [Google Scholar] [CrossRef]
- Chen, K.; Lu, W.; Xue, F.; Tang, P.; Li, L.H. Automatic building information model reconstruction in high-density urban areas: Augmenting multi-source data with architectural knowledge. Autom. Constr. 2018, 93, 22–34. [Google Scholar] [CrossRef]
- Pica, D.; Abanda, F.H. Emerging BIM-3D-Laser Scanning Integration in Construction Practice. In Proceedings of the 11th International Conference (CITC-11), Construction in the 21st Century, London, UK, 9–11 September 2019. [Google Scholar]
- Maalek, R.; Lichti, D.D.; Ruwanpura, J.Y. Automatic recognition of common structural elements from point clouds for automated progress monitoring and dimensional quality control in reinforced concrete construction. Remote Sens. 2019, 11, 1102. [Google Scholar] [CrossRef]
- Remondino, F. Heritage recording and 3D modeling with photogrammetry and 3D scanning. Remote Sens. 2011, 3, 1104–1138. [Google Scholar] [CrossRef]
- Campi, M.; di Luggo, A.; Scandurra, S. 3D modeling for the knowledge of architectural heritage and virtual reconstruction of its historical memory. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 133. [Google Scholar] [CrossRef]
- Fassi, F.; Fregonese, L.; Ackermann, S.; De Troia, V. Comparison between laser scanning and automated 3d modelling techniques to reconstruct complex and extensive cultural heritage areas. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 5, W1. [Google Scholar] [CrossRef]
- Guidi, G.; Russo, M.; Angheleddu, D. 3D survey and virtual reconstruction of archaeological sites. Digit. Appl. Archaeol. Cult. Herit. 2014, 1, 55–69. [Google Scholar]
- Nocerino, E.; Menna, F.; Remondino, F. Accuracy of typical photogrammetric networks in cultural heritage 3D modeling projects. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 45, 465–472. [Google Scholar] [CrossRef]
- Pärn, E.A.; Edwards, D.J. Conceptualising the FinDD API plug-in: A study of BIM-FM integration. Autom. Constr. 2017, 80, 11–21. [Google Scholar] [CrossRef]
- Díaz-Vilariño, L.; Frías, E.; Balado, J.; González-Jorge, H. Scan planning and route optimization for control of execution of as-designed BIM. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 4. [Google Scholar] [CrossRef]
- Xiong, X.; Adan, A.; Akinci, B.; Huber, D. Automatic creation of semantically rich 3D building models from laser scanner data. Autom. Constr. 2013, 31, 325–337. [Google Scholar] [CrossRef]
- Bosché, F.; Ahmed, M.; Turkan, Y.; Haas, C.T.; Haas, R. The value of integrating Scan-to-BIM and Scan-vs-BIM techniques for construction monitoring using laser scanning and BIM: The case of cylindrical MEP components. Autom. Constr. 2015, 49, 201–213. [Google Scholar] [CrossRef]
- Kim, M.K.; Wang, Q.; Park, J.W.; Cheng, J.C.; Sohn, H.; Chang, C.C. Automated dimensional quality assurance of full-scale precast concrete elements using laser scanning and BIM. Autom. Constr. 2016, 72, 102–114. [Google Scholar] [CrossRef]
- Wu, W.; Chen, C.; Cong, Y.; Dong, Z.; Li, J.; Li, S.; Dai, W.; Yang, B. Low-cost wheeled robot-borne laser scanning system for indoor and outdoor 3d mapping application. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 4213, 1155–1159. [Google Scholar] [CrossRef]
- Cheng, L.; Chen, S.; Liu, X.; Xu, H.; Wu, Y.; Li, M.; Chen, Y. Registration of laser scanning point clouds: A review. Sensors 2018, 18, 1641. [Google Scholar] [CrossRef]
- Fryskowska, A.; Stachelek, J. A no-reference method of geometric content quality analysis of 3D models generated from laser scanning point clouds for hBIM. J. Cult. Herit. 2018, 34, 95–108. [Google Scholar] [CrossRef]
- Barbosa, F.; Woetzel, J.; Mischke, J. Reinventing Construction: A Route of Higher Productivity; McKinsey Global Institute: Chicago, IL, USA, 2017. [Google Scholar]
- Aydin, C.C. Designing building façades for the urban rebuilt environment with integration of digital close-range photogrammetry and geographical information systems. Autom. Constr. 2014, 43, 38–48. [Google Scholar] [CrossRef]
- Fröhlich, C.; Mettenleiter, M. Terrestrial laser scanning–new perspectives in 3D surveying. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 36, W2. [Google Scholar]
- Bhatla, A.; Choe, S.Y.; Fierro, O.; Leite, F. Evaluation of accuracy of as-built 3D modeling from photos taken by handheld digital cameras. Autom. Constr. 2012, 28, 116–127. [Google Scholar] [CrossRef]
- Göçer, Ö.; Hua, Y.; Göçer, K. A BIM-GIS integrated pre-retrofit model for building data mapping. In Building Simulation; Tsinghua University Press: Beijing, China, 2016; Volume 9, pp. 513–527. [Google Scholar]
- Hichri, N.; Stefani, C.; De Luca, L.; Veron, P.; Hamon, G. From point cloud to BIM: A survey of existing approaches. In Proceedings of the XXIV International CIPA Symposium, Strasbourg, France, 2–6 September 2013. [Google Scholar]
- Tang, P.; Anil, E.B.; Akinci, B.; Huber, D. Efficient and effective quality assessment of as-is building information models and 3D laser-scanned data. In Proceedings of the International Workshop on Computing in Civil Engineering, Miami, FL, USA, 19–22 June 2011; pp. 486–493. [Google Scholar]
- Tang, P.; Huber, D.; Akinci, B.; Lipman, R.; Lytle, A. Automatic reconstruction of as-built building information models from laser-scanned point clouds: A review of related techniques. Autom. Constr. 2010, 19, 829–843. [Google Scholar] [CrossRef]
- Wang, C.; Cho, Y.K.; Kim, C. Automatic BIM component extraction from point clouds of existing buildings for sustainability applications. Autom. Constr. 2015, 56, 1–13. [Google Scholar] [CrossRef]
- Lagüela, S.; Díaz-Vilariño, L.; Martínez, J.; Armesto, J. Automatic thermographic and RGB texture of as-built BIM for energy rehabilitation purposes. Autom. Constr. 2013, 31, 230–240. [Google Scholar] [CrossRef]
- Rebolj, D.; Pučko, Z.; Babič, N.Č.; Bizjak, M.; Mongus, D. Point cloud quality requirements for Scan-vs-BIM based automated construction progress monitoring. Autom. Constr. 2017, 84, 323–334. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Search Engines | Science Direct | Ebsco | Emerald | Google Scholar |
|---|---|---|---|---|
| Journals | Occurrence | |||
| ISPRS Journal of Photogrammetry and Remote Sensing | 2 | 3 | 1 | |
| Automation in Construction | 1 | 1 | ||
| Journal of Cultural Heritage | 1 | 3 | ||
| Measurement | 1 | 1 | ||
| Pattern Recognition | 1 | 2 | 1 | |
| Journal of Building Engineering | 1 | |||
| Advanced Engineering Informatics | 2 | 1 | ||
| Automation in Construction | 4 | 2 | ||
| Procedia Engineering | 1 | |||
| Simulation Modelling Practice and Theory | 1 | |||
| Sensors | 7 | 1 | ||
| International Journal of Distributed Sensor Networks | 1 | |||
| IEEE Transactions on Geoscience & Remote Sensing | 3 | |||
| Journal of Sustainable Forestry | 1 | |||
| Geomechanik and Tunnelbau | 1 | |||
| International Journal of Pattern Recognition & Artificial Intelligence | 1 | |||
| Remote Sensing | 4 | |||
| Journal of Coastal Research | 1 | |||
| Instrumentation, Mesures, Métrologies | 1 | |||
| ISPRS International Journal of Geo-Information | 1 | |||
| Computers & Geosciences | 1 | |||
| International Journal of Remote Sensing | 2 | |||
| International Journal of Agricultural & Biological Engineering | 1 | |||
| Engineering Geology | 2 | |||
| Geomatics & Information Science of Wuhan University | 1 | |||
| International Journal of Pavement Engineering | 1 | |||
| International Journal of Applied Earth Observation & Geoinformation | 1 | |||
| Journal of Computing in Civil Engineering | 1 | |||
| Bulletin of Engineering Geology & the Environment | 1 | |||
| International Journal for Light & Electron Optics | 1 | |||
| Archives of Photogrammetry, Cartography & Remote Sensing | 3 | |||
| Journal of Applied Geodesy | 1 | |||
| International Journal of Production Research | 1 | |||
| Mathematical Problems in Engineering | 1 | |||
| Journal of the Institute of Science & Technology | 1 | |||
| Landslides | 1 | |||
| Annals of Botany | 1 | |||
| Computer-Aided Design & Applications | 1 | |||
| Estuarine Coastal & Shelf Science | 1 | |||
| Ecology & Evolution | 1 | |||
| Agricultural & Forest Meteorology | 1 | |||
| Computers & Electronics in Agriculture | 1 | |||
| Geophysical Research Abstracts | 2 | |||
| International Journal of Building Pathology and Adaptation | 1 | |||
| Journal of Facilities Management | 1 | |||
| International Journal of Intelligent Computing and Cybernetics | 1 | |||
| Built Environment Project and Asset Management | 1 | |||
| Engineering, Construction and Architectural Management | 1 | |||
| Assembly Automation | 1 | |||
| European Journal of Remote Sensing | 1 | |||
| Applied Mechanics and Materials | 1 | |||
| American Journal of Engineering Research | 1 | |||
| IEEE Access | 1 | |||
| Revista de la Facultad de Ingeniería U.C.V | 1 | |||
| Bulletin of Surveying and Mapping | 1 | |||
| Computer Science | 1 | |||
| Journal of Shandong University of Technology | 1 | |||
| Metal Mine | 1 | |||
| Nonferrous Metals Science and Engineering | 1 | |||
| Journal of Wuhan University of Technology | 1 | |||
| Construction Management and Economics | 1 | |||
| ‘Scan to BIM’ | ||||
|---|---|---|---|---|
| Search Engines | Science Direct | Ebsco | Emerald | Google Scholar |
| Journals | Occurrences | |||
| Journal of Building Engineering | 1 | |||
| Advanced Engineering Informatics | 1 | 6 | 1 | |
| Automation in Construction | 4 | 11 | 1 | |
| Procedia Engineering | 1 | |||
| Simulation Modelling Practice and Theory | 1 | |||
| Remote Sensing | 3 | 2 | ||
| Simulation Modelling Practice & Theory | 1 | |||
| Computer-Aided Civil & Infrastructure Engineering | 1 | |||
| Journal of Computing in Civil Engineering | 2 | |||
| Journal of Facilities Management | 1 | |||
| Built Environment Project and Asset Management | 1 | |||
| Structural Survey | 1 | |||
| The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences | 4 | |||
| Architectural Engineering and Design Management | 1 | |||
| Architecture and Civil Engineering | 1 | |||
| Virtual Archaeology Review | 1 | |||
| Geo Business | 1 | |||
| European Real Estate Society | 1 | |||
| Construction Research Congress | 1 | |||
| Scan Parameter | Trimble TX8 Specifications |
|---|---|
| Maximum range (m) | 120 m |
| Minimum range (m) | 0.6 m |
| Field of view (degree) | 360° × 317° |
| Scanning speed | 1 million points/second |
| Scan duration (seconds) | 60 s |
| Scan accuracy (mm) | <2 mm noise or error on most surfaces |
| Laser beam diameter (mm) | 6–34 invisible |
| Data storage | USB flash drive |
| Station | Distance from Nearest Building Surface (Meters) | Cloud Points |
|---|---|---|
| Station A | 15.5 m | 1,035,939 |
| Station B | 20 m | 1,178,415 |
| Station C | 6.5 m | 1,428,007 |
| Station D | 22.5 m | 1,072,529 |
| Station E | 13.6 m | 1,389,529 |
| Station | Distance from Nearest Building Surface (Meters) | Cloud Points (Millions) |
|---|---|---|
| Station 1 | 3 m | 1,879,252 |
| Station 2 | 4.5 m | 1,864,804 |
| Station 3 | 2.5 m | 1,865,083 |
| Station 4 | 3.5 m | 1,857,055 |
| Station 5 | 4 m | 1,861,777 |
| Station 6 | 2 m | 1,843,463 |
| Station 7 | 3.5 m | 1,873,135 |
| Station 8 | 5 m | 1,875,792 |
| Station 9 | 5 m | 1,878,262 |
| Station 10 | 5 m | 1,835,489 |
| Station 11 | 4.5 m | 1,894,394 |
| Station 12 | 4.5 m | 1,895,844 |
| Cloud Model | Cloud Points Prior to De-Noising | Cloud Points after De-Noising | Redacted Points |
|---|---|---|---|
| Exterior Model | 8,224,818 | 4,093,981 | 4,130,837 |
| Interior Model | 52,278,405 | 50,127,390 | 2,0151,015 |
| File Format | Availability | Compatible Software | BIM Applications |
|---|---|---|---|
| DWG | Available | AutoCAD Suite, Revit | Required |
| DXF | Available | AutoCAD Suite, Revit | Upon request |
| IFC | Not available | Revit, Costx, Navisworks | Required |
| SKP | Built-in plugin | SketchUp, 3ds Max, Revit | Upon request |
| OBJ | Available | 3ds Max | Upon request |
| KMZ | Available | Google Earth | Upon request |
| FBX | Available | 3ds Max, AutoCAD Suite | Upon request |
| Not available | Adobe Acrobat, AutoCAD Suite | Upon request | |
| DGN | Available | AutoCAD Suite, Revit | Upon request |
| ACIS | Not available | AutoCAD Suite | Upon request |
| 3D Laser Scanner | Software | File in (Input to Software) | File Out (Output from Software) | ||
|---|---|---|---|---|---|
| Point Cloud based software | 3D laser scanner-dependent software | Trimble TX (Data output format: RWP) | Trimble Realworks | RWP, XYZ, E57, LAS, LAZ, ZFS, RSP, FLS, DP, PTX, PTS | E57, ASC, LAS 1.2, LAS 1.4, LAZ, POD, PTS, PTX, TZF, BSF, KMZ, DWG, DXF, DGN, FBX, OBJ |
| FARO (Data output format: FLS) | FARO Scene | FLS, XYZ, CVS, COR, CPE | PTC, PTX, PST, XYZ, DXF, IGES, VRML, E57 | ||
| Leica (Data output format: PTX and PTS) | Leica Cyclone | XYZ, PTS, PTX, LAS, E57, ZFS, DP | XYZ, PTS, PTX, E57, DXF, PCI/CWF, DBX, gbXML | ||
| 3D laser scanner-independent software | LiDAR360 | LiData, las, laz, asc, neu, xyz, pts, csv, ply | LiData, las, laz, asc, neu, xyz, pts, csv, ply | ||
| PolyWorks | IGES, STEP, DXF, JT, OBJ, PLY, POL, STL, VRML 2.0 | IGES, STL, DXF | |||
| PointCab | dp, e57, asc, fws, lsproj, fls, las, laz, lsdx, lse, dae, 3ds, ifc, stl, mpc, ply, ptg, ptx, rps, pvtp, vtp, xyz, zfs, .zfprj | dwg, dxf, dae, 3ds | |||
| BIM-based tools | Autodesk Recap | ASC, CL3, CLR, E57, FLS, FWS, ISPROJ, LAS, PCG, PTG, PTS, PTX, RDS, TXT, XYB, XYZ, ZFS, ZFPRJ, DXF, DWG | RCS, RCP, PCG, PTS, E57, DXF, DWG | ||
| Autodesk Revit | DWG, RVT, DXF, gbXML, RCP, DWF | DWG, DXF, gbXML, FBX, DGN, ACIS, IFC | |||
| Bentley | POD, OBJ, SHP, DXF, DWG, ESRI, E57, ZFS, LAZ, LAS, FLS, FWS, XYZ, PTS, PTX, PTZ, TXT, LWO, CL3, BIN, RSP, 3DD | POD, PTS, XYZ | |||
| ArchiCAD | DWG, IFC, 3DS, 3DM, SKP, KMZ, STL, PDF, DXF | PDF, DWF, DXF, DWG, DGN | |||
| Web-based visualization and processing | FARO SCENE WebShare | rcp, pod, xyz, e57 | |||
| Leica Pegasus | |||||
| Flyvast | LAS, LAZ, XYZ, PTX, PLY, OBJ | FLY, dxf, shp | |||
| Voxxlr | IFC, Dxf, e57, pts, ply, las, laz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Almukhtar, A.; Saeed, Z.O.; Abanda, H.; Tah, J.H.M. Reality Capture of Buildings Using 3D Laser Scanners. CivilEng 2021, 2, 214-235. https://doi.org/10.3390/civileng2010012
Almukhtar A, Saeed ZO, Abanda H, Tah JHM. Reality Capture of Buildings Using 3D Laser Scanners. CivilEng. 2021; 2(1):214-235. https://doi.org/10.3390/civileng2010012
Chicago/Turabian StyleAlmukhtar, Avar, Zaid O. Saeed, Henry Abanda, and Joseph H. M. Tah. 2021. "Reality Capture of Buildings Using 3D Laser Scanners" CivilEng 2, no. 1: 214-235. https://doi.org/10.3390/civileng2010012
APA StyleAlmukhtar, A., Saeed, Z. O., Abanda, H., & Tah, J. H. M. (2021). Reality Capture of Buildings Using 3D Laser Scanners. CivilEng, 2(1), 214-235. https://doi.org/10.3390/civileng2010012