Abstract
Electrochemical energy storage technology has the characteristics of convenient use, fast response, and flexible configuration. At present, the energy storage technology used in smart electric vehicles is mainly electrochemical energy storage technology. In particular, the promotion of electrochemical energy storage technology in the field of smart electric vehicles is an effective way to achieve the goal of carbon neutrality. One of the most critical issues limiting the development and popularity of intelligent electric vehicles is the performance and range of power batteries; vehicle path planning is very important to the performance of power batteries and the driving range. Improved path planning algorithms can obviously shorten the path length and reduce the time of searching and planning a path under the condition of the same starting point and end point, that is, to increase the range of the power battery. On the premise of the comprehensive analysis of the intelligent electric vehicle’s grasp of environmental information, trajectory planning methods are divided into local trajectory planning and global trajectory planning methods. The main content of the trajectory planning method is given, the key technologies involved in the research are discussed, and its advantages and disadvantages are analyzed. Finally, the main development trends of intelligent electric vehicle trajectory planning technology in the future are proposed.
1. Introduction
Intelligent electric vehicles are a typical high-tech complex that combines modern automobile technology with the electronic computer, modern sensing, electro-chemicals, batteries, information fusion, communication, artificial intelligence, automatic control, and other scientific and technological achievements [1]. Ordinary electric vehicles are mainly rooted in performance, power, and other dimensions, focusing on driving pleasure, while smart electric vehicles are rooted in the interaction of vehicles, people, roads, infrastructure, and other aspects and pay more attention to intelligent interactions, experiences, and services. The intelligent electric vehicle will be linked to the automatic driving challenge of trajectory planning. Supposing that external information and vehicle status information are not obtained, or that the vehicle and environment space and time constraints are combined incorrectly, in that case, the intelligent electric vehicle will make incorrect trajectory plans, increasing its power consumption, reducing the battery life, and even causing traffic accidents in severe cases.
Charging points and stations can be displayed on a map after being updated by the vehicle’s onboard navigation system. When the driver inputs the starting point and end point into the vehicle, the vehicle can automatically and reasonably plan the path according to the driving range and the remaining power of the power battery it is currently carrying. After accurate planning, the vehicle can automatically guide the charging (at the appropriate place) to effectively relieve power anxiety. It can reduce the occurrence of vehicles running out of power during driving and increase drivers’ driving experience of electric vehicles and unmanned vehicles, which is also of significant reference value for the construction and planning of charging piles and charging stations.
At present, the research of intelligent electric vehicles is still in the initial stage, and there is still a long way to go before the ultimate goal of fully autonomous driving L5 stage vehicles [2]. In recent years, with the continuous advancement of China’s infrastructure construction and its rapid economic development, the road environment has become complicated, making the trajectory planning of intelligent electric vehicles that are in the process of autonomous driving complicated. Intelligent electric vehicle trajectory planning aims to plan and decide on a safe and comfortable obstacle avoidance trajectory based on real-time traffic information and vehicle status under strict safety constraints [3].
This paper reviews the trajectory planning of intelligent electric vehicles and their key technologies, summarizes the latest research progress and the advantages and disadvantages of the key technologies, and forecasts the development trend of trajectory planning technology in the future.
2. Application of Electrochemical Energy Storage in Intelligent Electric Vehicles
According to the performance requirements of smart electric vehicle power batteries, Zhang Yuntian [4] compared the existing main electrochemical energy storage technologies from the perspectives of energy, specific energy, specific power, charging performance, safety, and cost, and summarized lead-acid batteries, Li-ion batteries, vanadium flow current, and sodium-sulfur battery application status in the commercialization of smart electric vehicles. It is noted that existing energy storage technologies are still insufficient in terms of specific energy, specific power, charging speed, cycle life, safety, and cost. Hence, they cannot fulfill the popularization and marketing of smart electric vehicles. More advanced energy storage technologies are also required for improved driving cycles, range, driving enjoyment, and cost savings.
For a problem that is difficult to systematically quantify, e.g., the selection of electrochemical energy storage technology solutions for smart electric vehicles, Zhao Zhenyu et al. [5] proposed a comprehensive evaluation method for electrochemical energy storage technology based on an improved AHP, the CRITIC method, and an approximation of the ideal solution sorting method. They chose eight evaluation indicators from technical and economic perspectives to create a comprehensive evaluation index system. The improved analytic hierarchy process determines the subjective weight, while the CRITIC technique determines the objective weight. The combination weight is determined using a game theory-based combined weighting approach. The degree of approximation between each electrochemical energy storage technology scheme and the ideal solution is determined by approximating the ideal solution ranking.
According to Tang Yougen et al. [6], a number of electrochemical energy storage technologies, such as lithium-ion batteries, have been commercialized and are now being developed on a wide scale. Similarly, certain developing electrochemical energy storage technologies, such as sodium-ion batteries and flow batteries, are in the early stages of commercialization and are fast expanding. People will focus on the development of energy storage technologies such as water-based batteries and electrochemical fuels in the future to address the issues with existing battery technologies, such as poor safety, low energy density, and high cost. The adoption and application of these advanced electrochemical energy storage technologies will have a significant impact on future energy development.
Xie Haining [7] proposed that two aspects of electrochemical energy storage technology can be promoted. The first is smart electric vehicles, where using energy storage batteries in smart electric vehicles is an important way to improve quality and lower costs. The second is the low-cost large-capacity power battery.
To sum up, the comprehensive evaluation method of electrochemical energy storage technologies based on an improved AHP, the CRITIC method, and the approximate ideal solution ranking method proposed by Zhao Zhenyu, is more suitable for storage applications.
3. Overview of Intelligent Electric Vehicle Trajectory Planning
The path planning problem first appeared in the late 1960s from the robot artificial intelligence field, especially from the geometric relationships between the mobile body and its obstacles, finding a non-collision path, i.e., the path is a static geometry rail line and does not include the concept of time, usually from the wheeled mobile robot in Cartesian coordinates and the position and posture of the relationship between [8].
Due to the low speed of robot movement, early scholars researched path planning. However, due to the high speed of vehicles, robot path planning could not be directly applied from this to the field of intelligent electric vehicles, so it was particularly necessary to include time in the planned path. Now, scholars have proposed the concept of trajectory planning [9]. Trajectory planning connects the initial environmental perception and the intelligent electric vehicle’s motion control. The trajectory is essentially a path with added speed information.
4. Key Techniques of the Trajectory Planning Method
4.1. Local Trajectory Planning Method
The local trajectory planning method is suitable for the situation where the external environment is completely unknown or partially known to the intelligent electric vehicle, which then needs to collect the external environment information in real-time and correct the environmental model in real-time. This method has good obstacle avoidance ability and robustness but may not find the optimal trajectory. The classification of local trajectory planning methods in this paper is shown in Figure 1.
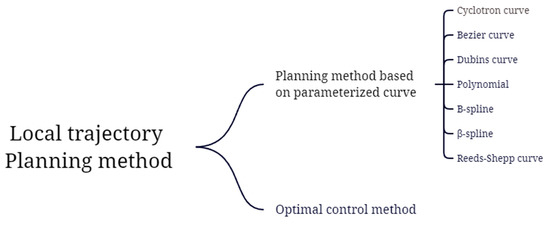
Figure 1.
Classification of local trajectory planning methods.
4.1.1. Planning Method Based on a Parameterized Curve
The parametric curve method usually adopts curves such as cyclotron, Bezier, Dubins, polynomial, spline, Reeds–Shepp, etc. [10]. This method is mostly used to optimize the generated trajectories. Almost all planning methods based on parametric curves are based on Bezier curves and B-spline curves. When using the planning method based on a parameterized curve to generate a trajectory, we need to first think about the actual requirements, then add certain constraints, and finally solve the curve equation. The trajectory planning method based on a parametric curve is usually curvature continuous, yet the planning efficiency is low. The method is mainly applied to highways and urban trunk roads with clear road marking lines, a single road background environment, and obvious geometric characteristics. It is seldom used on urban non-main roads and rural streets.
- (1)
- Cyclotron curve, also known as an Euler helix, is characterized by a curvature proportional to curve length and continuous curvature change. A cyclotron curve is usually used in the design of automobile roads in China. The cyclotron curve can meet the needs of alignment coordination, driving comfort, and economic reasonableness. Using the cyclotron curve method for trajectory planning can ensure the continuous change of curvature between the lane line and the curve. At the current stage, the cyclotron curve is widely used in the field of automatic parking-path planning [11]. The optimization procedure was divided into an offline and an online phase by Su Zhibao et al. [12], who integrated the cyclotron curve with the A * algorithm. The offline portion is in charge of creating a search graph using the mapping relationship between the trajectory space and grid cells, while the online portion is in charge of employing A *. The algorithm looks for the best possible path. The method takes into account the platform’s kinematics, and the projected path is quite practical;
- (2)
- The Bezier curve was initiated by Paul Castello in 1959. The shape of the Bezier curve is determined by its control points, and each coordinate function of a Bezier curve is polynomial [13]. In the process of trajectory generation, the starting point and end point should be selected as two control points, respectively, and the other control points should be selected according to the calculation results of vehicle constraints. The Bezier curve is widely used in lane change-trajectory planning at the current stage [14]. The heading angle of a Bezier curve changes continuously in the process of lane change. However, the rate of change of the heading angle at the beginning of lane change is not zero, which means it is easy to lead the car into dangerous situations, such as vehicle sideslip [15];
- (3)
- The Dubins curve is one of the best-known methods for generating smooth paths suitable for mobile robots. Dubins curves are more widely used in the field of aircraft trajectory planning in the current stage [16]. Through simulation comparisons, Song Guohao et al. [17] verified the practicality and low error rate of this method in automobiles. Dubins curves have good real-time performance and low latency, but they have a few flaws: they are discontinuous at the arc-straight segment intersection, and the automobile must halt at the breakpoint to realign itself before driving;
- (4)
- Polynomial is a simple continuous function with easy parameter construction. In trajectory planning, cubic polynomials and quintic polynomials with higher frequencies are used. The cubic polynomials constrain the initial absolute quantity, initial speed, end absolute quantity, and end speed. The quintic polynomial is suitable for cases with six boundary conditions and is often used in lane change trajectory planning. Analooee A et al. [18] proposed a new trajectory planning method based on an explicit quintic polynomial curve: SCR-Normalize, and two concepts were established: rotating coordinate reference and trajectory normalization. This method has high efficiency in generating optimal trajectories. The cubic polynomial can guarantee the continuity of displacement, speed, and angle but cannot guarantee the continuity of acceleration. The discontinuity of acceleration will lead to the occurrence of dangerous situations such as motor jitter [19]. The quintic polynomial can guarantee the continuity of displacement, speed, acceleration, and curvature without acceleration mutation. However, the trajectory planned by cubic polynomials and quintic polynomials has no uniform speed stage in the whole process. The trajectory is always in the state of acceleration or deceleration. This planning method is not suitable for Cartesian space planning and will suffer certain limitations in practical application;
- (5)
- The B-spline is a generalization of the Bezier curve. DB-RRT and FMDB-RRT are two B-spline-based rapid exploration random tree (RRT) algorithms suggested by Sun Yuxi et al. [20]. The DB-RRT approach successfully builds collision-free dynamic feasible trajectories by combining the convex hull qualities of B-splines with the rapid expansion capacity of RRT. The FMDB-RRT method can increase the clearance of DB-RRT while lowering planning time and unpredictability. The continuous derivation of curvature is a benefit of the B-spline curve. B-spline curves have strong applicability because they provide local support. Adjusting the trajectory segment between control nodes will not influence the trajectory segment between other control nodes;
- (6)
- The promotion and development of the B-spline curve provide the basis for the -spline curve. Based on the B-spline curve, it introduces new parameters. The -spline curve alters the shape of the curve by changing the control vertex, and while it shares many of the same properties as the B-spline curve, its solution is more difficult due to the addition of new parameters. Wu Feilong et al. [21] proposed an autonomous parking path planning method based on the improved -spline theory method, which included a parking kinematics model, its physical condition constraints, path obstacle avoidance constraints, and vehicle steering wheel angle and angular velocity constraints;
- (7)
- The Reeds–Shepp curve is an improvement on the Dubins curve, and the path is Reeds–Shepp if the vehicle is able to travel in both directions on the trajectory. The Reeds–Shepp curve has the same advantages and disadvantages as the Dubins curve. Tong Zhaojing et al. [22] investigated the planning and implementation of Reeds-Shepp routes and suggested an optimal path navigation approach for Reeds–Shepp vehicles that do not need attitude. The simulation findings demonstrate that designing a navigation method based on this path can effectively minimize the autonomous vehicle’s driving time and operational costs.
4.1.2. Optimal Control Method
The optimal control method is also called the numerical optimization method. The goal is to minimize or maximize functions that are constrained by different variables. The optimal control is the point (pointed to by the optimal control theory) to find a feasible control input vector ; in theory, it can make the dynamic restriction system along the feasible trajectory equation . The trajectory can be made via the evaluation function, , or loss function, minimum [23]. In the cost function of the optimal control method, variables such as collision risk, comfort, kinematic constraints, and traffic rules are generally considered. Moreover, weights are assigned to different variables according to drivers’ driving habits to calculate the cost function of the trajectory set [24]. The trajectory generated by this method has many advantages, such as curvature accuracy; continuous curvature can make driverless cars drive on the road smoothly and can also avoid adjusting the direction to stop the breakpoints from happening. However, trajectory planning needs to establish an optimization function, leading to the optimal control method being limited to a certain degree in trajectory planning.
4.2. Global Trajectory Planning Method
When the intelligent electric vehicle has a high level of knowledge of the external world, the global trajectory planning approach is appropriate. Its precision is proportionate to how well it understands the external world. The global trajectory planning method will fail if the external environment has created temporary barriers. The needs for real-time optimization capabilities are low, and the planning results are better with this method. However, the requirements for mastering the external environment are quite high, and its robustness is weak. The classification of global trajectory planning methods in this paper is shown in Figure 2.
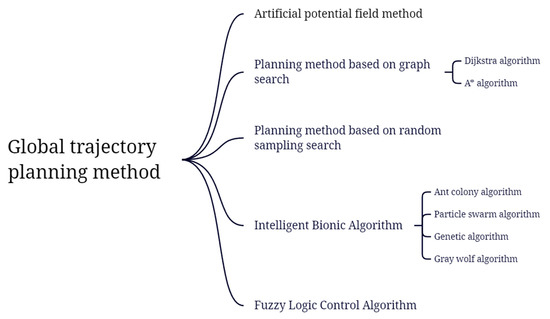
Figure 2.
Classification of global trajectory planning methods.
4.2.1. Artificial Potential Field Method
The artificial potential field method abstracts the external environment of an intelligent electric vehicle driving into the gravitational field and repulsive force fields via certain algorithms. Target points generate the gravitational force on the intelligent electric vehicles, and obstacles generate the repulsive force on an intelligent electric vehicle. Trajectory planning is completed by solving potential compound fields [25].
The artificial potential field method is commonly used in the field of intelligent robots for trajectory planning. In recent years, many scholars have improved the traditional artificial potential field method and applied it to the field of vehicle trajectory planning. The artificial potential field approach is used by the gray wolf algorithm by Zafar M N et al. [26]. The approach begins by defining the focus region, which displays all accessible places, and then uses the gray wolf algorithm to find the shortest path by minimizing the artificial potential field value of the positions generated in the focus area. Experiments show that this technology can not only find the best or nearly best way across a complicated obstacle environment, but it can also provide a useful real-time strategy. This strategy can reduce the length of the path while ensuring that no collisions occur. Zhang Ruke [27] derived the vehicle’s stability constraints, merged the enhanced potential field with a model predictive control, used the potential field function as the predictive controller’s goal function, and proposed the step function technique to ensure obstacle boundary safety. To finish the design of the path planning module, a quintic polynomial fitting approach is given to tackle the planning hash point problem. The artificial potential field approach generates a smooth trajectory, has a simple algorithm structure, and has a quick optimization speed. However, it very easily falls victim to the local optimal problem, which might result in erroneous trajectories being found or the trajectory not being found at all.
4.2.2. Planning Method Based on Graph Search
The most typical graph search algorithms are the Dijkstra algorithm and A * algorithm [28]. Depth-first and breadth-first are the two directions of the graph search algorithms, which construct a trajectory from the beginning to the end according to the road information and obstacle information obtained from external perception.
- (1)
- The Dijkstra algorithm was proposed by Edsger Wybe Dijkstra in 1959 [29]. The Dijkstra algorithm adopts the breadth-first search [30]. The smallest binary heap was employed as the auxiliary data structure of Dijkstra’s shortest path algorithm by Wang Zhilin et al. [31]. The solution time and the number of execution times of basic operations are fewer than with standard Dijkstra, and the efficiency of the optimization algorithm is positively connected with the problem size. Xu Peng et al. [32] used AHP to perform quantitative analysis on six influencing factors, including environmental factors that affect road traffic, and changed the weight of each line based on the degree of the influencing factors, improving the shortest path that was previously based solely on road distance analysis, making the calculation outcomes more realistic. The traditional Dijkstra algorithm must be able to find the optimal path, but its solution can only start from a certain point, and the optimal path whose weights are all positive [33];
- (2)
- The A * algorithm was first proposed by Hart P E et al. in 1968. It was obtained by adding a heuristic function into the Dijkstra algorithm and has been widely applied in the field of global path planning in static road networks [34]. Zhang Tao et al. [35] suggested a novel A * algorithm planning approach based on the standard A * algorithm in order to construct a “map information” mapping mechanism and improve the evaluation function setup. The revised A * algorithm can increase the quality of the path scheme by better coordinating the relationship between various decision targets. To improve and rasterize the indoor environment modeling approach, Tang Xiangrong et al. [36] developed three concepts: “guideline”, “key point list”, and “two-way search.” The new technique can cut memory utilization by more than 60%. The A * algorithm considers both efficiency and completeness, and its calculating method is straightforward, but it takes up a lot of memory.
4.2.3. Planning Method Based on Random Sampling Search
In the field of intelligent electric vehicles, the most commonly used planning method based on random sampling search is the fast exploration random tree method (RRT) [37]. Using a heuristic function, Zhang Wei et al. [38] suggested an enhanced RRT algorithm that included a memory technique to avoid oversampling or slipping into local minima in a non-convex environment during random tree expansion. It directs the growth of random trees and uses a domain expansion method to avoid the RRT algorithm’s “rewiring” process, resulting in better real-time planning performance. Xi Yingqi et al. [39] combined the artificial potential field method with the biased target RRT algorithm, judging the local minimum in the process of solving the artificial potential field method, and completing a switch with the biased target RRT algorithm, which considered global and real-time performance. At the same time, it prevents the artificial potential field approach from falling into the local minimum value, minimizes the biased target RRT algorithm’s planning time and enhances the path generation quality. Despite the fact that the random sample search planning method has rapid search speed, the quality of path creation and real-time planning performance are low, the randomness is high, and there are cases when the track cannot be discovered.
4.2.4. Intelligent Bionic Algorithm
The actions, habits, and features of living things, for example, are referred to by intelligent bionic algorithms. It has a simple structure, superior search ability, and can produce better results than other algorithms [40].
- (1)
- The ant colony algorithm was proposed by Dorigo et al. in the 1990s [41]. Wang Jing et al. [42] used the state transition probability formula of the ant colony method to calculate the security factor and weighting factor and incorporated the hyperbolic tangent function as an adaptive dynamic factor in the global pheromone update process. The experimental results show that the approach has a faster convergence speed and a better path, and that it can also plan a path in an environment containing obstacles in a reasonable manner. Zhang Songcan et al. [43] proposed a hybrid algorithm, EACSPGO, for mobile robot path planning, which combined the improved ant colony system with a local optimization algorithm based on path geometric characteristics, significantly improving the algorithm’s computational efficiency and solution quality. The classic ant colony algorithm is sturdy and transparent. However, some flaws exist, such as poor convergence speed, the ability to fall into a local optimal solution, and an inexact method;
- (2)
- Particle swarm optimization (PSO) is an algorithm based on the regularity of foraging activities in bird groups. Wu Guangfu et al. [44] significantly altered the global optimal particle’s velocity, searched for capabilities using a non-linear-inertia weight balance method, and then established a fitness function that took path length and smoothness into account. This strategy prevents the particle from falling into a local optimum while also balancing the algorithm’s global and local search capabilities. The testing results reveal that the method has a faster convergence speed and can still discover the best path even when obstacles are present. To develop the algorithm, Xiong Xinxia et al. [45] used inertia weights to boost the particle search ability, chaotic variables to improve convergence speed, and two evolutionary operators: multiple crossover and mutation. When compared to the traditional particle swarm optimization approach, the algorithm’s optimization ability and convergence speed were greatly improved, especially in multi-obstacle environments. The use of particle swarm optimization has the advantages of a quick run time and ease of implementation, but it has drawbacks such as “premature” convergence, unequal paths, and the ability to slip into a local optimum [46];
- (3)
- A genetic algorithm is one that is based on biological population evolution. To implement a genetic algorithm, Nadia A S et al. [47] used an enhanced selection operator, an adaptive population size, and a changed process. In terms of optimization and execution speed, this strategy is great. Zhou Jiaquan [48] refined the crossover mutation operator by combining the simulated annealing process with the genetic algorithm. The method has a better search ability and adaptability, and it enhances the convergence speed while overcoming the standard genetic algorithm’s local optimum flaw. Global convergence is a benefit of genetic algorithms, but their convergence pace is slow, and their local optimization accuracy is low;
- (4)
- Mirjalili S et al. introduced the gray wolf algorithm in 2014, which is based on the hunting process [49]. For the first time, Liu Ningning et al. [50] applied the gray wolf algorithm to mobile robot obstacle-avoidance-path planning, proposing a non-linear updating factor. This strategy increases the algorithm’s stability and optimization performance by balancing its global and local search capabilities. On the basis of the traditional gray wolf algorithm, Wang Yongqi et al. [51] combined a reverse learning mechanism and an individual position update approach, utilizing historical knowledge. This method outperforms the standard gray wolf algorithm in terms of solution accuracy and robustness. The gray wolf algorithm is superior to other sorts of intelligent bionic algorithms [52].
4.2.5. Fuzzy Logic Control Algorithm
A fuzzy logic control algorithm is an algorithm that imitates human thinking, which imitates fuzzy reasoning and decision-making processes [53]. Zhang Junxi et al. [54] used a hybrid of genetic and fuzzy logic control algorithms. The fuzzy logic control algorithm creates a rule base based on the classification result of the external data acquired by the genetic algorithm. The method improves the ability of the mobile robot to process and recognize external data. Luo Chaomin et al. [55] proposed a neural network-based fuzzy logic control technique for mobile robots, which combined biologically inspired neural dynamics models with fuzzy logic technology. A bio-inspired fuzzy neural network tracking controller with a smooth continuous zero starting value velocity instruction was designed. This method can efficiently optimize and address the problem of the generated optimal path having large inaccuracies. The fuzzy logic control algorithm has the advantages of being durable, adaptable to external disturbances, and allows for real-time control. However, human experience will influence the algorithm’s performance and the vast amount of computing results in low computational efficiency.
5. Conclusions
This study primarily discusses the major technologies used in trajectory planning based on the degree of mastery of environmental knowledge and compares and contrasts the benefits and drawbacks of global and local trajectory planning technologies. Although the intelligent electric vehicle trajectory planning method has progressed through current research, many technologies and methods are still in the theoretically feasible stage, with trajectory planning technology having many flaws that need to be fixed before it can be used in intelligent electric vehicles. The current development trends in trajectory planning technology are as follows, based on the ongoing depth of related research:
- (1)
- The trajectory planning method for intelligent electric vehicles on unstructured roads. Basically, all trajectory planning methods at the present stage are only applicable to structured roads. The trajectory planning methods on structured roads cannot be directly applied to unstructured roads. There are too many unknown factors on unstructured roads, so it is easy to find the optimal trajectory and fall into the local optimal solution;
- (2)
- The trajectory planning method that combines multiple intelligent bionic algorithms. Considering the in-depth research on trajectory planning technology and its increasing complexity, a single intelligent bionic algorithm can no longer meet the growing human needs for trajectory planning technology. A variety of intelligent bionic algorithms can better solve complex multi-objective path planning problems, such as the combination of the particle swarm optimization algorithm and ant colony algorithm, which improves obstacle avoidance ability and the comprehensive performance of planning [56];
- (3)
- The pure visual path planning method. Through visual perception, multi-sensor fusion, and other technologies (obtaining information on pedestrians and vehicles outside via 360° HD cameras), deep learning technology and social force modeling might predict the trajectory of pedestrians and vehicles via the comprehensive analysis of the predicted information to generate a real-time trajectory, such as the current Tesla automatic driving assistance function;
- (4)
- The trajectory planning method based on intelligent perception. The intelligent sensing trajectory planning method obtains external information via intelligent sensors and generates trajectory in real-time, according to pre-set algorithms, which can effectively improve the real-time performance and anti-interference of the trajectories and promote the construction of intelligent transportation and smart cities;
- (5)
- The trajectory planning method aimed at power saving. Through the intelligent transportation system, current road traffic information can be obtained in real time, reducing power consumption due to parking, waiting, and slow driving. Through real-time calculation and big data, the most power-saving driving speed, under the current road conditions, is obtained.
Author Contributions
Writing—original draft preparation, A.L. and Y.J.; Writing—review and editing, X.S., H.C. and C.N.; Investigation, G.L. All authors have read and agreed to the published version of the manuscript.
Funding
This project is supported by the National Natural Science Foundation of China (Grant No. 51505258 and 61601265), the Natural Science Foundation of Shandong Province, China (Grant No. ZR2015EL019, ZR2020ME126 and ZR2021MF131), The Youth Science and Technology Plan Project of Colleges and Universities in Shandong Province (Grant No. 2019KJB019), the Open project of State Key Laboratory of Mechanical Behavior and System Safety of Traffic Engineering Structures, China (Grant No. 1903), and the Open project of Hebei Traffic Safety and Control Key Laboratory, China (Grant No. JTKY2019002).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
Thanks to all the authors’ contribution to this article writing. Special thanks to Chunpeng Gong for his efforts. The authors are indebted to the reviewers for the valuable comments and suggestions.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Samak, T.V.; Samak, C.V.; Xie, M. AutoDRIVE Simulator: A Simulator for Scaled Autonomous Vehicle Research and Education. In Proceedings of the 2021 2nd International Conference on Control, Robotics and Intelligent System, Qingdao, China, 20–22 August 2021; pp. 9–13. [Google Scholar]
- Hao, Y.; Yin, D. Integrated Control of Path Following and Lateral Stability for Unmanned Autonomous Vehicle with Decentralized Driving System. In Proceedings of the 2020 the 7th International Conference on Automation and Logistics (ICAL 2020), New York, NY, USA, 22–24 July 2020; pp. 20–24. [Google Scholar]
- Petrov, P.; Nashashibi, F. Modeling and Nonlinear Adaptive Control for Autonomous Vehicle Overtaking. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1643–1656. [Google Scholar] [CrossRef]
- Zhang, Y. Electrochemical Energy Technology Application for Electric Vehicles. Sci. Technol. Inf. 2017, 15, 19–20. [Google Scholar]
- Zhao, Z.; Zhou, R. Comprehensive Evaluation of Electrochemical Energy Storage Technology for Electric Vehicles Based on Improved AHP-CRITIC-TOPSIS. Chin. J. Power Sources 2021, 45, 1581–1583+1607. [Google Scholar]
- Tang, Y.; Fu, Z.; Zhang, Q. Development of Electrochemical Energy Storage Technology (PART 2). Pop. Util. Electr. 2022, 37, 40–41. [Google Scholar]
- Xie, H. Comprehensive Analysis on Electrochemical Energy Storage Mode and Energy Storage Materials. Smart Grid. 2014, 2, 4–8. [Google Scholar]
- Li, A.; Li, S.; Li, D.; Shen, H.; Miao, X. On the Trajectory Planning’s Key Technologies for Intelligent Vehicle. Mech. Sci. Technol. Aerosp. Eng. 2013, 32, 1022–1026. [Google Scholar]
- Yang, X. Autonomous Vehicle Motion Planning Based on Model Prediction in the Medium and High Speed Overtaking Scene; University of Chinese Academy of Sciences: Shenzhen, China, 2020. [Google Scholar]
- Dinçer, Ü.; Çevikb, M. Improved Trajectory Planning of an Industrial Parallel Mechanism by a Composite Polynomial Consisting of Bézier Curves and Cubic Polynomials. Mech. Mach. Theory 2019, 132, 248–263. [Google Scholar] [CrossRef]
- Sui, L.; Hou, Y.; Chen, X.; Jia, C.; Huang, M. Path Planning Based on Clothoid for Autonomous Valet Parking. In Proceedings of the International Computer Conference on Wavelet Active Media Technology and Information Processing (ICCWAMTIP), Chengdu, China, 18–20 December 2020; Volume 15, pp. 389–393. [Google Scholar]
- Su, Z.; Zhao, X.; Zhu, S.; Zhang, H. A Local Path Planning Method Based on Clothoid Model. Fire Control. Command. Control. 2019, 44, 148–152. [Google Scholar]
- Baydas, S.; Karakas, B. Defining a Curve as a Bezier Curve. J. Taibah Univ. Sci. 2019, 13, 522–528. [Google Scholar] [CrossRef]
- Korzeniowwski, D.; Ślaski, G. Method of Planning a Reference Trajectory of a Single Lane Change Manoeuver with Bezier Curve. IOP Conf. Ser. Mater. Sci. Eng. 2016, 148, 321–329. [Google Scholar] [CrossRef]
- Li, D. Research on Automatic Control Algorithm of Emergency Lane Change Steering System under Fast Driving; Jilin University: Changchun, China, 2020. [Google Scholar]
- Cheng, J.; Hu, X.; Xiao, J.; Zhang, G.; Zhou, Q. Route Planning of Mixed Ant Colony Algorithm Based on Dubins Path. In Proceedings of the 2021 IEEE 16th Conference on Industrial Electronics and Applications (ICIEA), Chengdu, China, 1–4 August 2021. [Google Scholar]
- Song, G.; Huanng, J.; Lan, Y. Intelligent Vehicle Path Planning Algorithm Based on Dubins Path. Fire Control. Command. Control. 2016, 41, 41–45. [Google Scholar]
- Analooee, A.; Kazeml, R.; Azadi, S. SCR-Normalize: A Novel Trajectory Planning Method Based on Explicit Quintic Polynomial Curves. Proc. Inst. Mech. Eng. Part K J. Multi. Body Dyn. 2020, 234, 650–674. [Google Scholar] [CrossRef]
- Gu, J.; Wu, T.; Li, C.; Zhang, B.; Zhang, Y. Trajectory Fairing Algorithm for Shrub Pruning Based on Improved Cubic B-spline. Trans. Chin. Soc. Agric. Mach. 2021, 52 (Suppl. S1), 89–97. [Google Scholar]
- Sun, Y.; Zhang, C.; Liu, C. Collision-Free and Dynamically Feasible Trajectory Planning for Omnidirectional Mobile Robots Using a Novel B-Spline Based Rapidly Exploring Random Tree. Int. J. Adv. Robot. Syst. 2021, 18, 17298814211016609. [Google Scholar] [CrossRef]
- Wu, F.; Guo, S. Path Planning of Autonomous Parking Based on Improved β-spline Theory. J. Jiangsu Univ. (Nat. Sci. Ed.) 2022, 43, 15–23. [Google Scholar] [CrossRef]
- Tong, Z.; Chen, W.; Gao, L. An Optimal Path Navigation without Goal Direction Requirements for Reed-Sheep Car. J. Air Force Eng. Univ. (Nat. Sci. Ed.) 2019, 20, 55–59. [Google Scholar]
- Bryson, A.E.; Ho, Y.C. Applied Optimal Control; Hemisphere: Bristol, UK, 1975. [Google Scholar]
- Yuan, W. Research on Trajectory Planning and Control Method for Hub Motor Intelligent Vehicle; Shandong Jiaotong University: Jinan, China, 2020. [Google Scholar]
- Barraquand, J.; Langglois, B.; Latombe, J. Numerical Potential Field Techniques for Robot Path Planning. IEEE Trans. Syst. Man Cybern. 1992, 22, 224–241. [Google Scholar] [CrossRef]
- Zafar, M.N.; Mohanta, J.C.; Keshari, A. GWO-Potential Field Method for Mobile Robot Path Planning and Navigation Control. Arab. J. Sci. Eng. 2021, 46, 8087–8104. [Google Scholar] [CrossRef]
- Zhang, R. Research on the Automatic Overtaking Control Method Based on the Improved Artificial Potential Field; Dalian University of Technology: Dalian, China, 2021. [Google Scholar]
- Ferguson, D.; Stentz, A. Using Interpolation to Improve Path Planning: The Field D* Algorithm. J. Field Robot. 2006, 23, 79–101. [Google Scholar] [CrossRef]
- Liu, W.; Xu, Y. Research on Parking Route Optimization Based on Improved Dijkstra Algorith. In Proceedings of the World Transportation Engineering and Technology Forum (WTC2021), Xi’an, China, 15–18 June 2021; pp. 1432–1442. [Google Scholar]
- Huang, Y. Research on the Improvement of Dijkstra Algorithm in the Shortest Path Calculation. In Proceedings of the 2017 4th International Conference on Machinery, Materials and Computer, Xi’an, China, 27–29 November 2017; Atlantis Press: Dordrecht, The Netherlands, 2017. [Google Scholar]
- Wang, Z.; Qiao, X.; Ma, X.; Yan, Y. A Dijkstra Shortest Path Optimization Method Based on Binary Heap. Chin. J. Eng. Math. 2021, 38, 709–720. [Google Scholar]
- Xu, P.; Cheng, G.; Li, M. Optimization and Application of Dijkstra’s Algorithm in GIS. Beijing Surv. Mapp. 2021, 35, 737–740. [Google Scholar]
- Li, M.; Shi, L. Design and Research of UGIS at Street Level. Beijing Surv. Mapp. 2007, 2, 36–39. [Google Scholar]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A Formal Basis for The Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Zhang, T.; Xiang, Q.; Zheng, W.; Sun, Y.; Zhou, X. Application of Path Planning Based on Improved A* Algorithm in War Gaming of Naval Warfare. Acta Armamentarii 2022, 43, 960–968. [Google Scholar] [CrossRef]
- Tang, X.; Zhu, Y.; Jiang, X. Improved A-star Algorithm for Robot Path Planning in Static Environment. J. Phys. Conf. Ser. 2021, 1792, 012067. [Google Scholar]
- Pivtoraiko, M.; Kelly, A. Efficient Constrained Path Planning Via Search in State Lattices. In Proceedings of the International Symposium on Artificial Intelligence, Robotics, and Automation in Space, Shanghai, China, 21–23 October 2005; pp. 1–7. [Google Scholar]
- Zhang, W.; Yi, C.; Gao, S.; Zhang, Z.; He, X. Improve RRT Algorithm for Path Planning in Complex Environments. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020. [Google Scholar]
- Xi, Y.; Shen, W.; Zhang, W.; Liu, J.; Liu, Q.; Shi, H. A Real-Time Dynamic Path Planning Method Combining Artificial Potential Field Method and Biased Target RRT Algorithm. J. Phys. Conf. Ser. 2021, 1905, 153–161. [Google Scholar]
- Hu, Z.; Feng, C.; Luo, Y. Improved Particle Swarm Optimization Algorithm for Mobile Robot Path Planning. Appl. Res. Comput. 2021, 38, 3089–3092. [Google Scholar]
- Zhu, Q.; Hu, J.; Cai, W.; Henschen, L. A New Robot Navigation Algorithm for Dynamic Unknown Environments Based on Dynamic Path Recomputation and an Improved Scout Ant Algorithm. Appl. Soft Comput. 2011, 11, 4667–4676. [Google Scholar] [CrossRef]
- Wang, J.; Fan, X.; Liu, Y.; Zhang, L.; Xu, Y. Improved Adaptive Ant Colony Algorithm for Obstacle Avoidance Path Planning of Mobile Robots. Prog. Appl. Math. 2021, 10, 2073–2082. [Google Scholar]
- Zhang, S.; Pu, J.; Si, Y.; Sun, L. Path Planning for Mobile Robot Using an Enhanced Ant Colony Optimization and Path Geometric Optimization. Int. J. Adv. Robot. Syst. 2021, 18, 17298814211019222. [Google Scholar] [CrossRef]
- Wu, G.; Wan, L. Research on Particle Swarm Algorithm to Optimize Robot Path Planning. Mech. Sci. Technol. Aerosp. Eng. 2021, 40, 1–7. [Google Scholar]
- Xiong, X.; He, L. Path Planning for Mobile Robot Based on Improved Particle Swarm Optimization Algorithm. Comput. Syst. Appl. 2021, 30, 153–159. [Google Scholar]
- Feng, J.; Zhang, T.; Feng, S.; Zheng, B. Improved Particle Swarm Optimization Algorithm for Robot Path Planning. Mech. Des. Manuf. 2021, 9, 291–294+298. [Google Scholar]
- Nadia, A.S.; Kais, S.I.; Zeyad, Q.H. A Modified Genetic Algorithm Path Planning for Intelligent Autonomous Mobile Robot. Inventi Rapid Algorithm 2012, 03, 523–527. [Google Scholar]
- Zhou, J. Research of Path Planning Problem Based on Improved Genetic Algorithm. Microcomput. Appl. 2021, 37, 1–3+8. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–64. [Google Scholar] [CrossRef]
- Liu, N.; Wang, H. Path Planning of Mobile Robot Based on Improved Grey Wolf Optimization Algorithm. Electr. Meas. Instrum. 2020, 57, 76–83+98. [Google Scholar]
- Wang, Y.; Jiang, X. Robot Path Planning Using a Hybrid Grey Wolf Optimization Algorithm. Comput. Eng. Sci. 2020, 42, 1294–1301. [Google Scholar]
- You, D.; Kang, Y.; Liu, P.; Hu, Y. A Path Planning Method for Mobile Robot Based on Improved Grey Wolf Optimizer. Mach. Tool Hydraul. 2021, 49, 1–6. [Google Scholar]
- Wang, K.; Chen, Y. Application of Fuzzy Control Algorithm in Path Planning of Mobile Robots. Digit. Technol. Appl. 2019, 37, 4–5+7. [Google Scholar]
- Zhang, J.; Mi, G.; Wang, X.; Jiang, J. Research on Path Planning of Robot Based on Evolutionary Algorithm and Fuzzy Control Algorithm. Comput. Technol. Dev. 2018, 28, 49–52+58. [Google Scholar]
- Luo, C.; Chu, Z. Neural-network-based Fuzzy Logic Tracking Control of Mobile Robots. In Proceedings of the 2017 13th IEEE Conference on Automation Science and Engineering (IEEE CASE’ 2017), Xi’an, China, 20–23 August 2017. [Google Scholar]
- Wang, Z.; Hu, X.; Li, X.; Du, Z. Overview of Global Path Planning Algorithms for Mobile Robots. Comput. Sci. 2021, 48, 19–29. [Google Scholar]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).