4.1. Measurement Set-Up
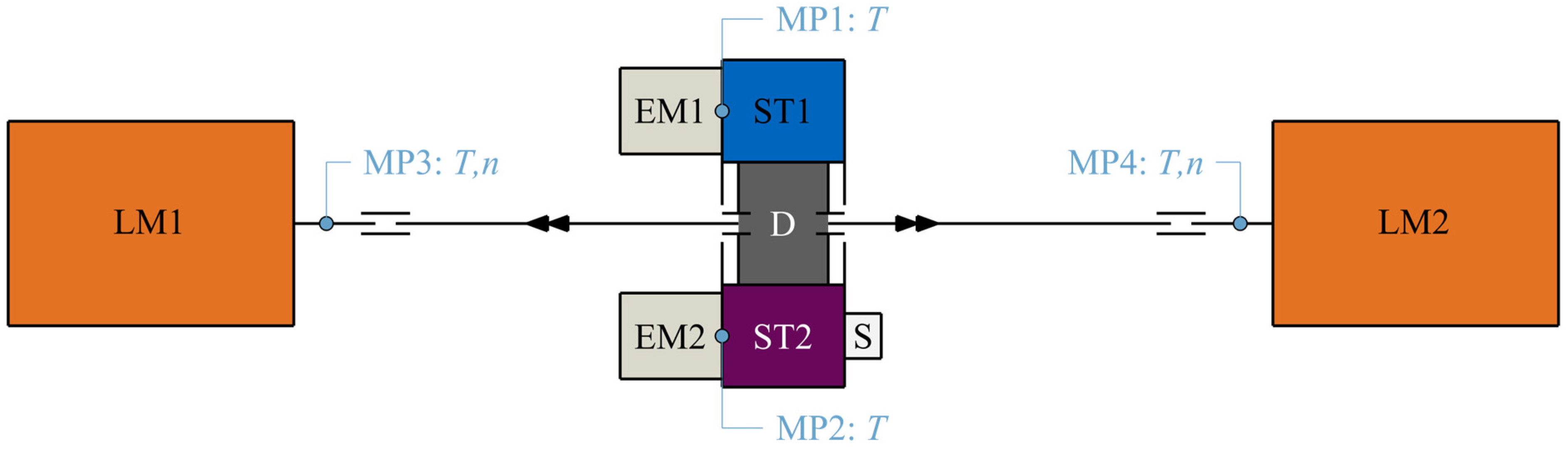
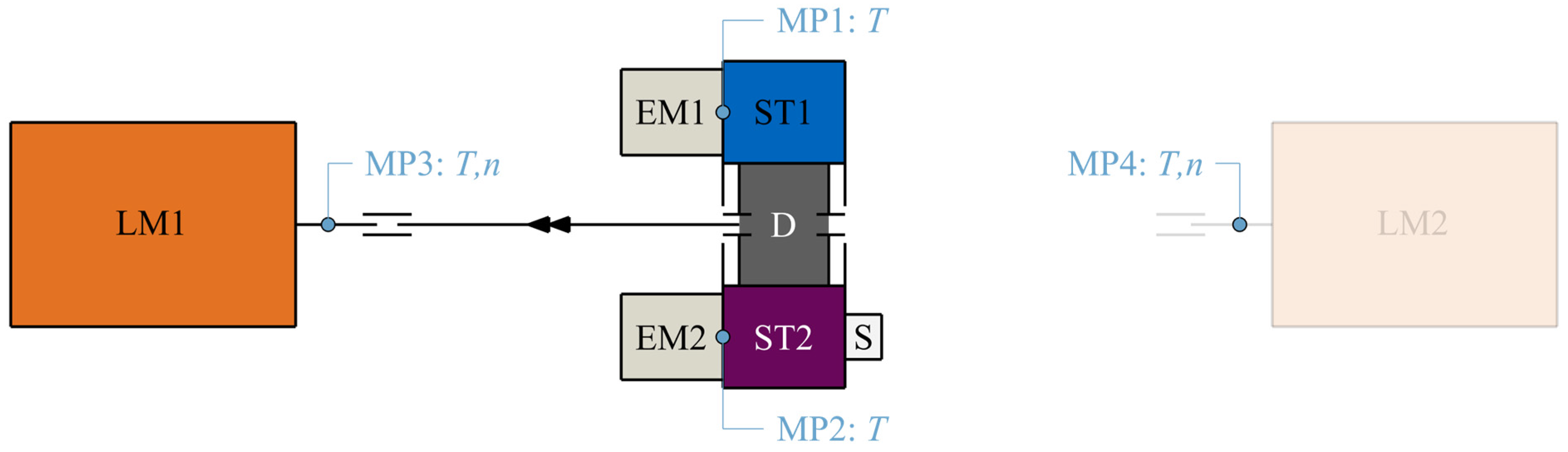
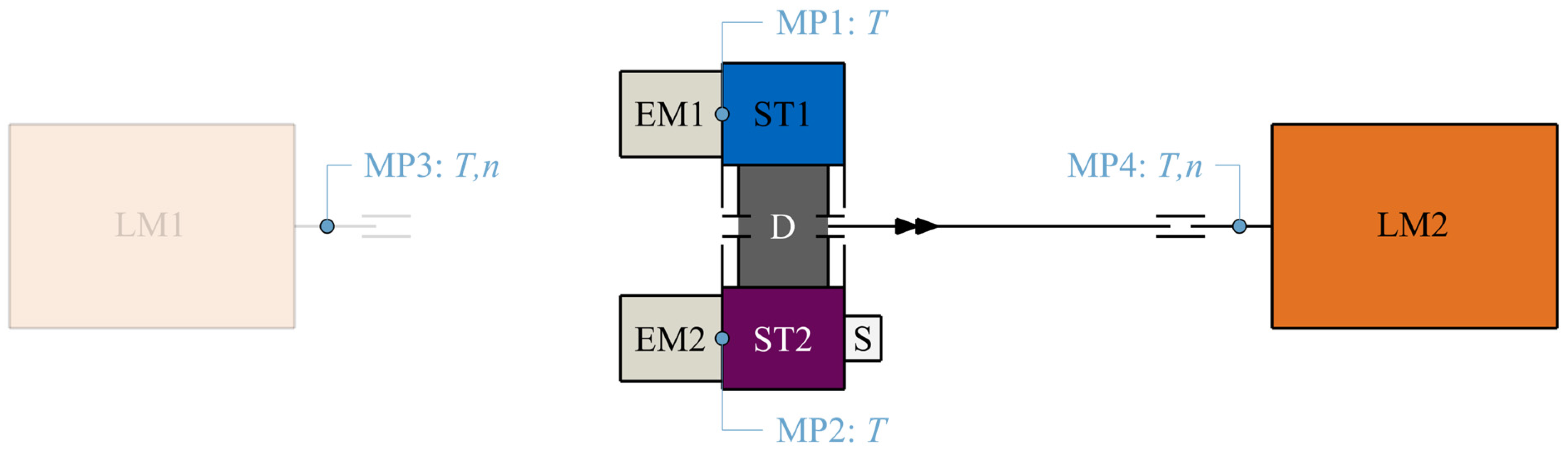
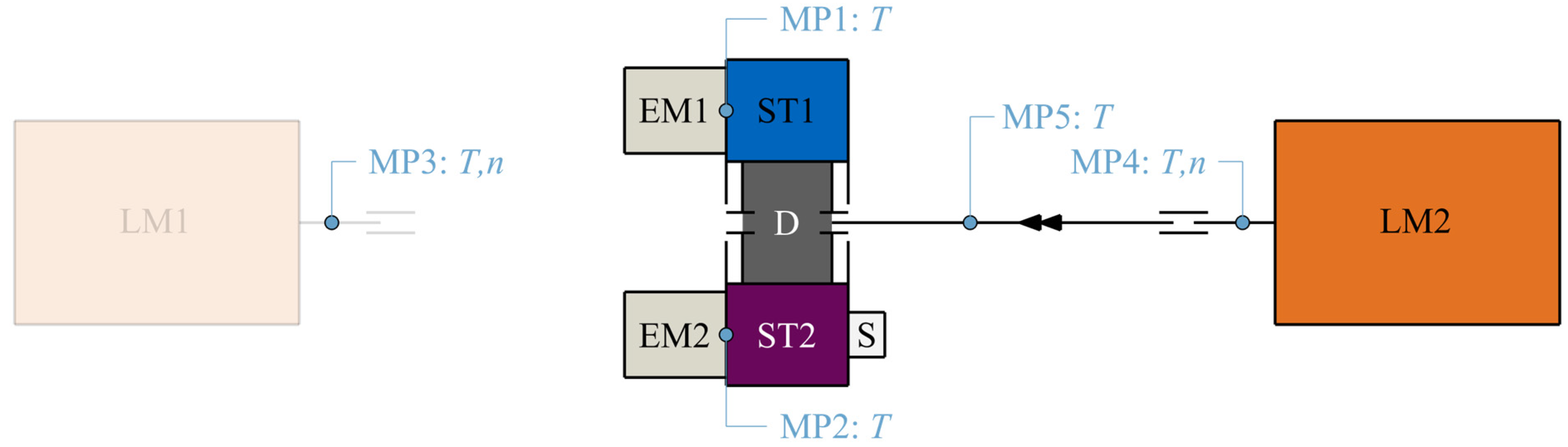
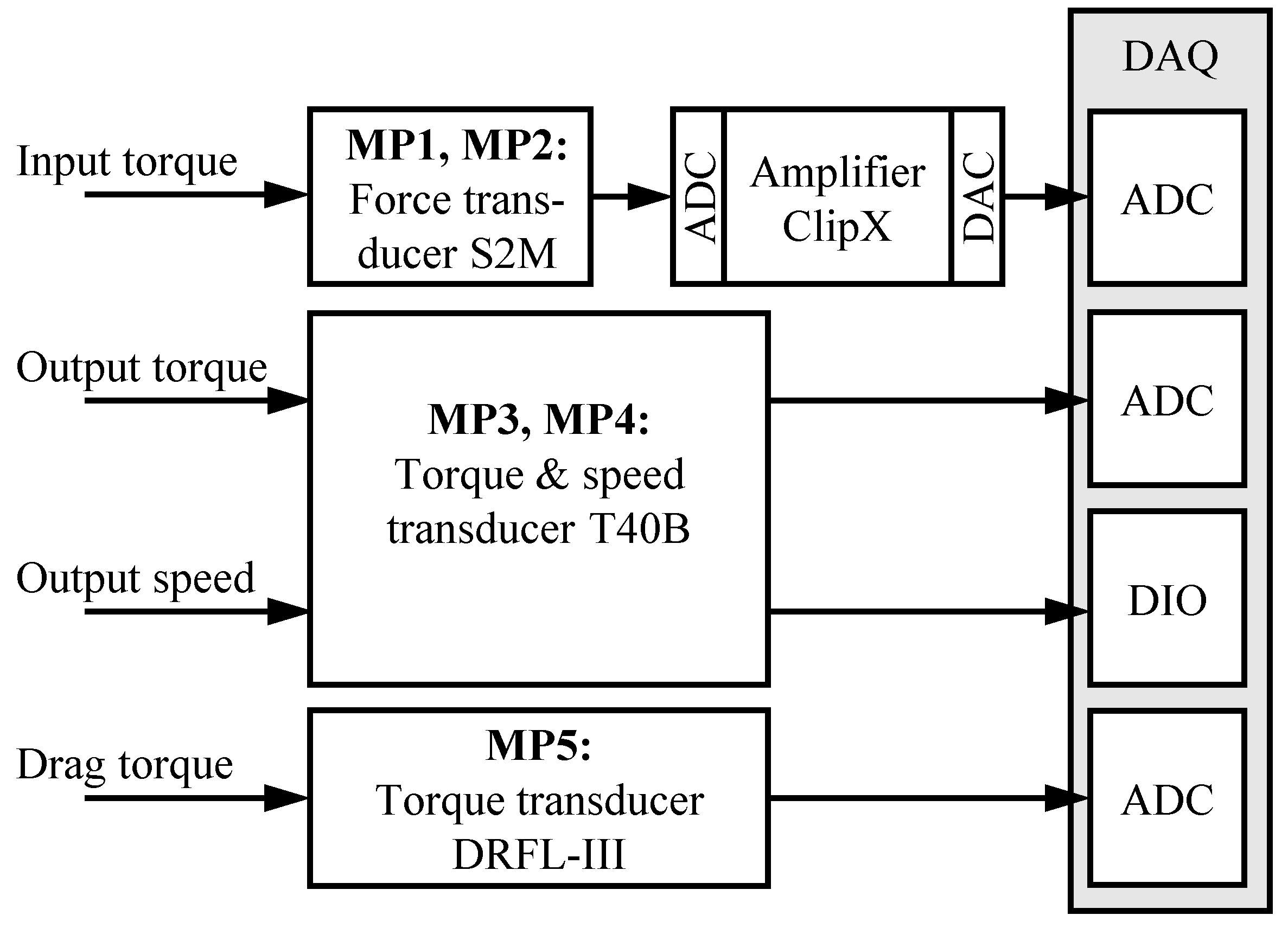
A simplified overview of the measurement set-up is shown in
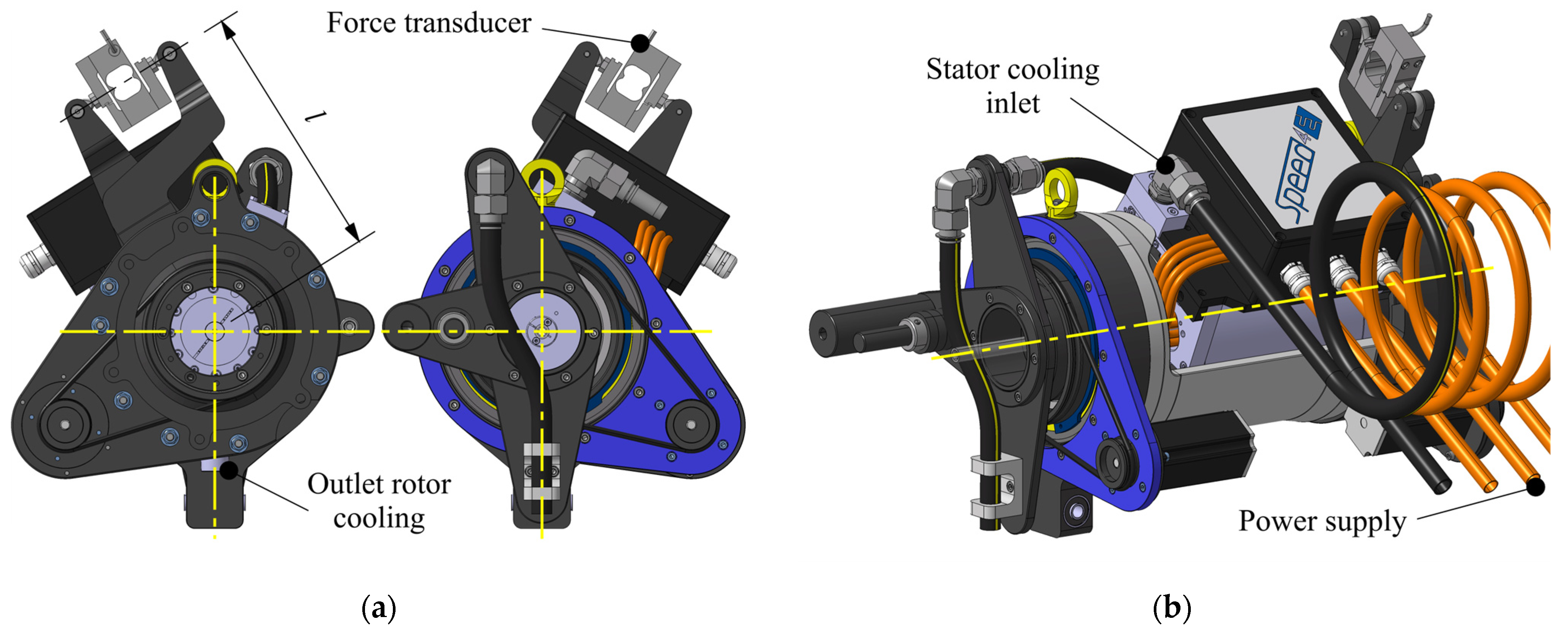
Figure 12. The input torques of both electric motors are measured at MP1 and MP2 using S2M force transducers by HBM (Darmstadt, Germany) [
22] with a nominal force of 200 N. The transducer can be used for tension and compression forces, which allows torque measurement during regenerative braking. The measurement is free from parasitic forces, as the transducer is mounted with ball joints, which only allow forces in the intended measurement direction. The transducer is based on an S-shaped body, whose deformation is measured by strain gauges arranged in a Wheatstone Bridge Circuit. A designated signal amplifier from the same manufacturer supplies the bridge circuit with the required voltage and processes the force signal. The amplifier scales the force signal of the transducer to a range of ±10 V.
Depending on the operation mode, T40B transducers by HBM [
23] for the output torque measurement (MP3 and MP4) and/or a DRFL-III transducer by ETH (Gschwendt, Germany) [
24] for drag torque measurement (MP5) are mounted directly between the load machines and the output shafts of the transmission. Elastic couplings and shafts with l/d >> 1 are used between the transmission output, the transducers, and the load machines to minimize the effect of parasitic forces or torques influencing the measured torque. The deformation of the transducer bodies is measured by strain gauges. The electrical power needed for the measurement circuit and the measurement signals are transmitted wirelessly between the rotating shaft and the stationary housing. While the drag torque transducer is equipped with bearings to support the rotating shaft, the output torque transducers require no bearings for the rotor, which is supported by the output shafts. The bearings in the drag torque transducer introduce friction into the measurement chain, which has to be considered when estimating the measurement uncertainty. Both types of transducers provide a scaled voltage signal between ±10 V, proportional to the measured torque.
Rotational speed can be measured via the output torque transducer, which provides a square-wave signal with 1024 impulses per revolution. The period duration between two impulses is measured to deduce the rotational speed. The rotational speed is only measured at the output shafts, as the input speeds can be calculated via the known gear ratios of each sub-transmission and the currently selected gear. If experiments are conducted with an unlocked differential, for the uncertainty calculations, it is assumed that both output shafts rotate at the same speed.
All analog signals are digitized and recorded by a data acquisition system (DAQ) via an analog-to-digital converter (ADC). The frequency of the rotational speed signal is measured with a digital input/output module (DIO). Three transducers with different nominal torques
of 10, 50, and 100 Nm are available to precisely measure drag torque over multiple magnitudes. Similarly, for the output torque, two variants of the transducer are used, with nominal torques
of 1000 and 2000 Nm, respectively (see
Section 3.3).
4.2. Calculation of Measurement Uncertainty
To calculate the measurement uncertainty using the MCM described in ISO/IEC GUIDE 98-3/SUPPL1:2008 [
20], it is first necessary to identify the quantities contributing to the uncertainty. Additionally, it is essential to know the probability density function (PDF) of the uncertainty component. The datasheets and calibration certificates of the used components are used for this. With the help of the sensors’ calibration certificates, the measurement device’s accuracy can be traced back to the national standard for a specific measurement unit (e.g., 1 m or 1 kg), which, in turn, is correlated to the SI Unit system. The deviations stated in the datasheets or certificates are given in relation to the input or output quantities of the device (e.g., force or voltage). Therefore, deviation amplitudes that are absolute (i.e., not dependent on the currently measured value) have to be converted to torque values. These values are multiplied by the respective gain factor of the component within the measurement chain (e.g., the length of the lever arm
or the gain factor of the amplifier) to achieve this. Relative deviation amplitudes based on the currently measured value can be used as they are.
Table 2 shows the uncertainty types caused by the used components, including their absolute or relative magnitude and type of PDF.
The torque transducers were calibrated according to VDI/VDE 2646 [
25]. The force transducers were calibrated according to the German National Metrology Institute’s DKD-R 3-3 guideline [
26]. The respective manufacturers performed all the calibrations. Most component datasheets and/or calibration certificates state temperatures (or temperature ranges) at which the given deviations were determined and are valid. Any operation at other temperatures (or outside the temperature ranges) leads to additional deviations during the measurements. An operating temperature of 22 °C was chosen for all components, as the test environment is air-conditioned. Even though the temperature lies within the allowed ranges of the measurement equipment, deviation from the temperature during calibration was considered if the resulting uncertainty was given.
As the transducer shaft for the drag torque measurement (MP5) is supported by a bearing on each side, the bearing friction on the transmission side influences the measurement. During a previous experimental investigation of the bearing losses, the used transducer model showed torque deviations between 0 and a maximum of 0.02 Nm within the required speed range. However, the deviations appeared randomly with no correlation to the rotational speed. To cover the range, the expected value was set to 0.01 Nm, and the interval half-width of the uniform distribution to 0.01 Nm.
Table 2.
The sources of deviations in the used components and their magnitude. The relative values are given as % of the measured value. The expected value for each uncertainty is zero if not otherwise declared. The magnitude values correspond to the interval half-width “a” for uniform distributions or the standard deviation σ for normal distributions.
Table 2.
The sources of deviations in the used components and their magnitude. The relative values are given as % of the measured value. The expected value for each uncertainty is zero if not otherwise declared. The magnitude values correspond to the interval half-width “a” for uniform distributions or the standard deviation σ for normal distributions.
Component and Source
of Deviation | Force Transducer
| Output Torque
Transducer | Drag Torque Transducer
| Amplifier ADC
| Amplifier ADC
| ADC
| DIO
|
|---|
| Non-linearity |
(uniform) |
(uniform) |
(uniform) |
(uniform) |
(uniform) |
(uniform) | / |
| Temperature |
(uniform) |
(uniform) |
uniform) |
(uniform) |
(uniform) | / | / |
| Hysteresis |
(uniform) | included in linearity |
(uniform) | / | / | / | / |
| Noise | / | / | / |
(uniform) |
(uniform) |
(normal) | / |
| Resolution | / | / | / |
(uniform) |
(uniform) | / | / |
| Repeatability |
(uniform) |
(normal) | / | / | / | / | / |
| Other | Creeping:
(uniform) | / | Friction:
(uniform,
1 | / | / | / | Counter dev.:
(uniform) 2 |
The deviation influencing the rotational speed measurement (counter deviation) at MP3 and MP4 stems from two sources. Firstly, the oscillator base clock of the DAQ used to measure the time between two impulses can deviate by 50 ppm from the nominal value of 80 MHz. Secondly, a phase shift between the base clock and the speed signal can cause a deviation of ±1 impulses of the base clock. The impact of this second deviation depends on the number of impulses per revolution, the rotational speed, and the base clock itself.
In order to quantify the measurement uncertainty of the measured values, the deviations
of the components of each measurement chain have to be combined. During this step, even small deviations should not be neglected, as they could have a large impact at certain operating points. A model equation for each measurement chain is generated, which serves as a mathematical representation. Equation (1) represents the input torque measurement
at transmission input 1 or 2. The index
denotes the measured torque value, which is the sum of the actual force value
(the index
denotes actual values) multiplied by the lever arm length
and the contributing deviations
. The sources of uncertainty (non-linearity, temperature, hysteresis) for each component are added together, i.e., in
, for the deviation sources of the force transducer.
Similarly, the model equations for the remaining measurement chains (output torques
, output rotational speed
, and drag torque
) can be created (see Equations (2)–(4)).
In contrast to the previous model equations, not all deviations contributing to the drag torque measurement have an expected value of zero.
The model equations above all represent physical quantities that can be measured directly or indirectly in the case of the input torque. More abstract quantities like transmission efficiency
and power loss
cannot be measured directly and have to be calculated with the measured torque and speed values. Equations (5) and (6) show the model equations for these quantities. The indices 1, 2, 3 and 4 correspond to MP1 to MP4.
As these quantities are based on the previously discussed torque and speed measurements (see Equations (1)–(4)), all of the deviations influencing these measurements also contribute to the efficiency and power loss uncertainty.
To calculate the expanded measurement uncertainty
for all measurement chains with the MCM, each model equation has to be evaluated
times. Each evaluation simulates a measurement and is based on random samples for each deviation source by the respective PDF. During each evaluation, the theoretical measured value is calculated. All
values represent the distribution of these simulated measurements. Based on this distribution, the expected value
and a symmetrical uncertainty interval can then be calculated for a desired confidence level
, which states how probable it is for the actual value to be within the given interval and represents the expanded uncertainty
. For this work, a confidence level of
was chosen, as it is commonly used for reporting measurement uncertainty. Based on the value of
, a number of
iterations is chosen in accordance with GUM [
20]. This procedure is repeated for each operating point.
The expected uncertainty is calculated for input torque values from −60 to 60 Nm and input speed values from 500 to 50,000 rpm.
4.3. Results of Measurement Uncertainty Analysis for ST1
To aid in understanding the results of this analysis, the measurement uncertainty estimation results in this section are given for experiments during which only ST1 is in use. In this case, ST2 is not engaged.
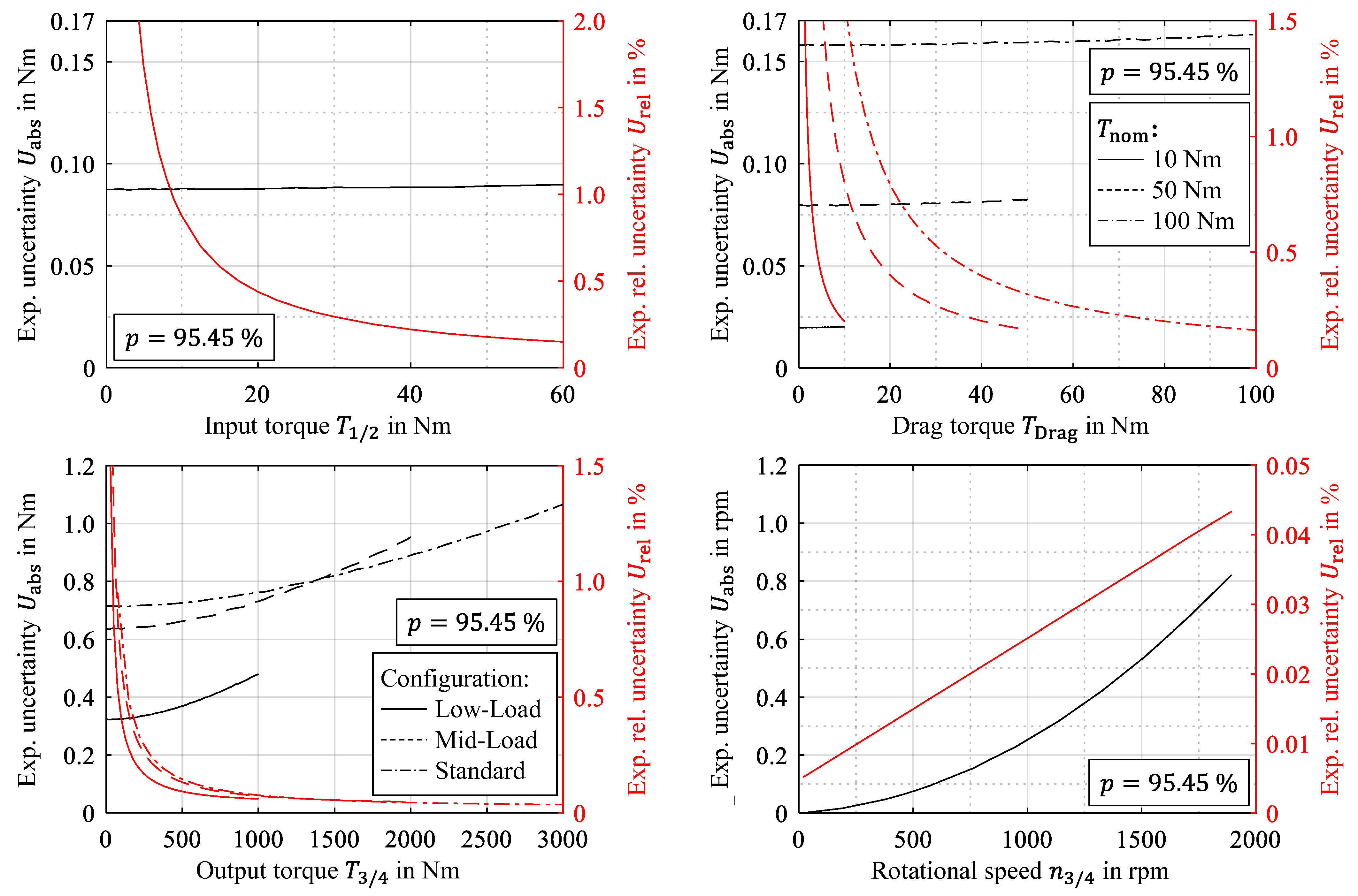
Figure 13 shows the absolute and relative measurement uncertainties for the input torque, the output torque, the rotational speed, and the drag torque. Negative measured values are omitted, as the measurement uncertainty is independent of the sign of the measured quantities.
It can be observed that the estimated absolute uncertainty of the input torque is primarily independent of the applied torque. This can be explained by the dominating effect of two deviation sources which together account for more than 90% of the measurement uncertainty: the deviation because of noise and the deviation because of the non-linearity of the ClipX DAC. Both sources are based on absolute reference values and, therefore, independent of the currently applied torque.
A similar behavior can be found for the drag torque, where the two dominating factors (hysteresis and non-linearity) are also absolute values based on the nominal torque. They account for more than 90% of the uncertainty of the transducers with a nominal torque of 50 and 100 Nm. For the smallest transducer , the bearing friction deviation is an additional absolute dominating source of deviation. All three sources account for at least 95% in all possible torque ranges.
For the total output torque, the measurement uncertainties are shown for the low-load, mid-load, and standard test rig configurations. A consistent split of 1/3 of the total output torque at MP3 and 2/3 at MP4 is assumed.
Comparing the output torque uncertainties for the range from 0 to 1000 Nm, it is visible that the measurement uncertainty is lowest when using only the smallest transducer at MP3. The standard configuration with both transducers at MP3 and MP4 leads to the largest measurement uncertainties in this region, which is why operation of the standard configuration in this region should be avoided. A similar result can be shown by comparing mid-load and standard configurations between 1000 and approx. 1400 Nm. However, above 1400 Nm, measurement at both MPs (standard configuration) results in a smaller uncertainty compared to measurement at only MP4 (mid-load configuration). This can be explained by the torque split, which results in a reduced torque at each transducer. The overall uncertainty is reduced in combination with the significantly lower measurement uncertainty of the 1000 Nm transducer. Even though this effect is significant when comparing the absolute measurement uncertainty, the difference is minimal in comparison with the respective torque values, which is why the relative measurement uncertainty is only slightly affected by this. The dominating uncertainty factors for the output torque measurement are the transducers’ repeatability and temperature deviations and the ADC’s non-linearity. The repeatability deviation is responsible for almost 90% of the expected uncertainty at torque values close to zero. As it is based on the nominal torque , its influence decreases with increasing torque values. At the same time, the transducer temperature deviation and the ADC non-linearity gain influence, as they are based on actual torque values. Both sources are responsible for 56.4% of the total expected uncertainty at .
The expected relative torque measurement uncertainties are naturally large for small torque values. At operating points very close to 0 Nm at the input or output, determining if the actual torque is positive or negative is often impossible because the uncertainty band is larger than the measured value. However, for most of the operating regions of each transducer, relative errors smaller than 0.5% are expected, reaching 0.14% for the input torque, 0.16% for the drag torque, and 0.05% for the output torque measurements.
The rotational speed measurement only depends on one uncertainty factor
(see Equation (3)), which contains two terms (see
Table 2). As the absolute measurement uncertainty
nearly shows a square law characteristic, the relative measurement uncertainty
increases nearly linearly with the rotational speed, in contrast to the torque measurements. However, the relative uncertainty of the speed signal with a maximum expected uncertainty of 0.43% is significantly smaller than the achievable torque uncertainties.
4.4. Expected Uncertainties for Efficiency and Power Loss Measurements at ST1
Using the model Equations (5) and (6), the results of the measurement uncertainty estimation of the torque and speed measurements can be further used to determine the efficiency and power loss of ST1. As the theoretical maximum output torque (no losses) is approx. 1600 Nm, the mid-load configuration of the load machines is chosen for the calculations (single 2000 Nm torque transducer). Additionally, in this case, ST2 is not used, which leads to a simplification of the model equations:
For the calculation of the expected measurement uncertainty, the draws from the distributions of the input quantities can be reused here. The results are interpreted in the same way.
To determine the output torque for a given input torque, simulated results of the transmission efficiency are applied. The simulation results in a discrepancy between positive and negative torque values, as the losses in normal operation mode are different than during regenerative braking. As transmission efficiency cannot be calculated at an input torque of 0 Nm; values of ±0.5 Nm are used instead. As efficiency simulation is not the main focus of this work and is merely necessary to generate realistic efficiency and power loss values, it is not described in detail. A more in-depth description of a similar approach for the same transmission can be found in Ref. [
18].
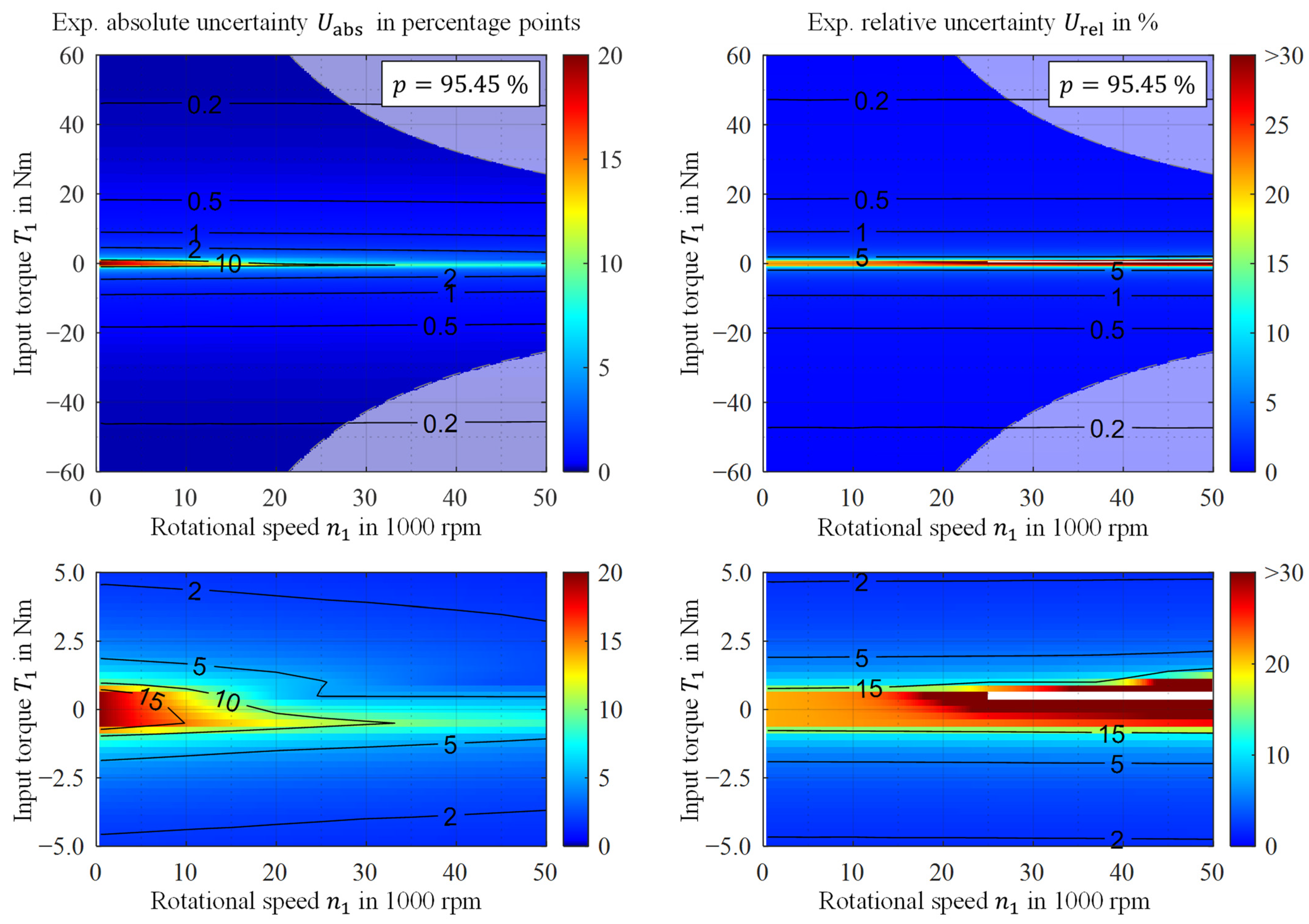
The expected measurement uncertainty of the efficiency measurement is shown in
Figure 14. Even though the input speed
at MP1 is not measured directly, it is used to denote the operating point in conjunction with the input torque
.
Figure 14 shows that the absolute efficiency measurement uncertainty
is virtually independent of the input speed. Only at minimal torque values can a dependency on speed be observed. This is not caused by the uncertainty of the rotational speed itself, which is not required to calculate the efficiency according to Equation (7), but rather, by the efficiency computation, which results in different efficiencies at different rotational speeds. At small input torque values, the expected measurement uncertainty reaches values of approx. 19.7% for torque values of 0.5 Nm. The dominating sources of uncertainty are the noise deviation (min. 49%) and the non-linearity deviation (min. 33%) of the amplifier DAC.
While the absolute uncertainty can be calculated for all operating points, the expected relative uncertainty cannot be calculated reasonably in some cases. For high rotational speeds and very low torque values, the simulated efficiency of the transmission is zero because the power losses are higher than the total input power. The relative uncertainty would be infinite at those operating points and can therefore not be shown. Naturally, the values for near this region are also very large, as the simulated efficiency is almost zero. However, in large regions of the operating spectrum, the relative uncertainty is very small and reaches a minimum of approx. 0.14% for the maximum input torque at all speeds.
Figure 15 shows the absolute measurement uncertainty for the power loss.
In comparison with the results of the efficiency measurement, the absolute expected uncertainty of the power loss measurement shows a different characteristic. At the same time, the relative uncertainty of the power loss measurement is significantly higher (between approx. 6% and 250%). Both effects can be explained by calculating the power loss (see Equation (8)). Although the rotational speed features a very small measurement uncertainty, the torque measurements are multiplied by the rotational speed, amplifying the uncertainty for increasing rotational speeds. This higher relative uncertainty can be explained by the subtraction of the output power from the input power. As the transmission is designed to be as efficient as possible, there is no large difference between the input and output values at most operating points. The power loss is, therefore, a relatively small value in comparison. However, the absolute measurement uncertainties of input and output power are combined via Pythagorean Addition. The result is an even larger overall uncertainty, which yields a large relative uncertainty in relation to the power loss. For example, the operating point’s highest relative uncertainty of 250% (, ) features a power loss of 1.9 W and an absolute uncertainty of 4.75 W.
Even though the expected uncertainty of the speed influences the power loss measurement, it only contributes marginally to the total uncertainty. The dominating factors and their influence are almost identical to the efficiency measurement (amplifier DAC noise deviation: min. 50%; amplifier DAC non-linearity deviation: min. 33%).
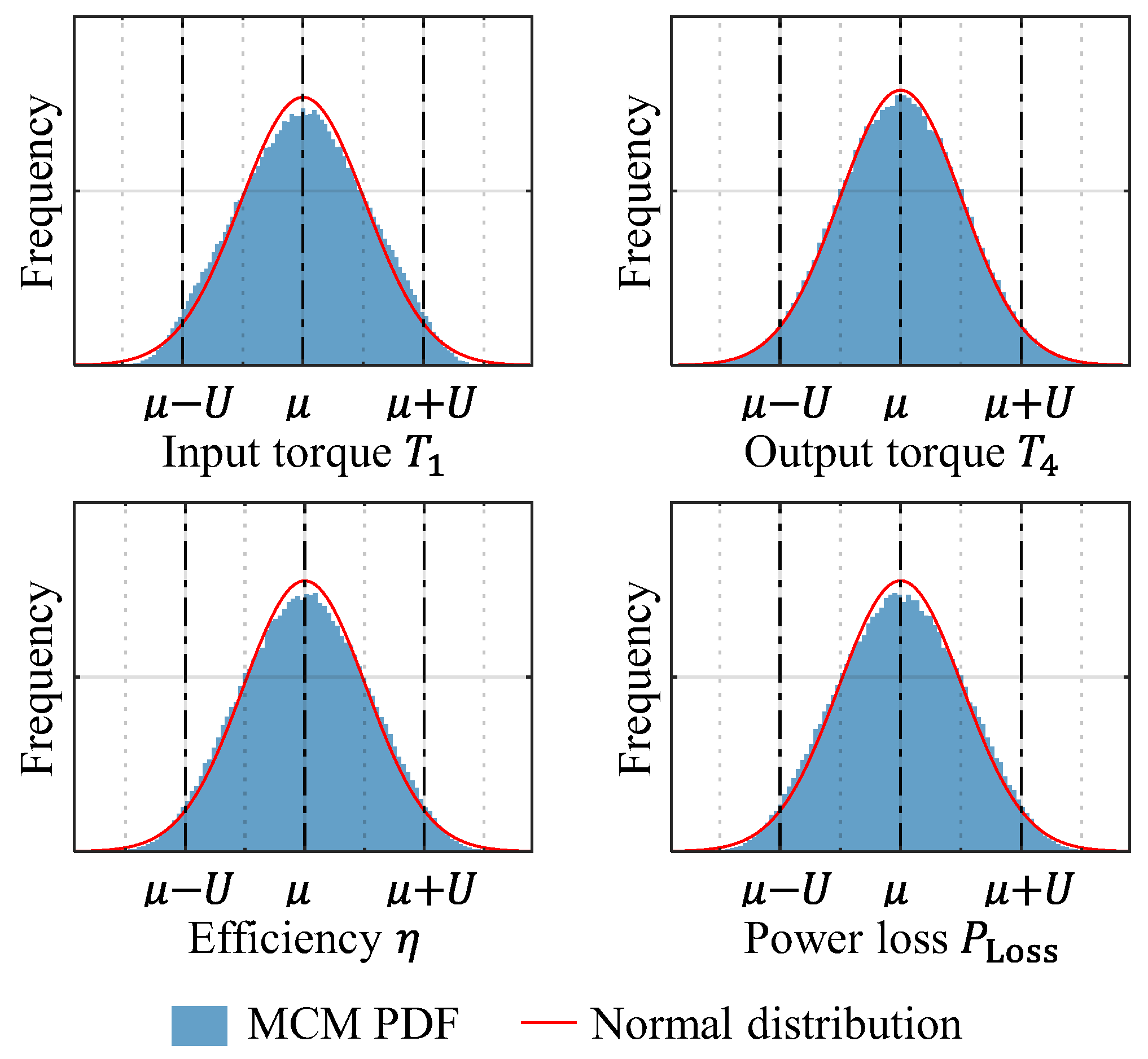
One of the main reasons for using the MCM instead of the standard GUM method was the presence of dominating factors and the uncertainty about the distribution of the measured uncertainties. To address this aspect,
Figure 16 shows normalized histograms of the expected measurement uncertainties
of the input and output torque and the efficiency and power loss of ST1 for one exemplary operating point. It can be seen that the input torque distribution calculated via the MCM does not follow a normal distribution. This can be attributed to the two dominating uncertainty factors (DAC noise and non-linearity), which are not normally distributed. While the output torque shows a greater resemblance to a normal distribution, the shape deviates from it, which is especially visible around the expected value
. At this investigated operating point, the three dominating deviation sources are the repeatability (normal distribution), the ADC non-linearity, and the temperature deviation of the transducer (uniform distributions). The efficiency and power loss measurement distributions also show slight deviations from a normal distribution. Here, the distributions are more similar to the input torque than the output torque, corresponding with the dominant factors present: the DAC noise and non-linearity deviation at the transmission input.
These results show that MCM usage is required to accurately estimate the measurement uncertainties of the considered test rig. However, if required, the calculated PDFs are similar enough to a normal distribution to allow realistic, rough estimates of measurement uncertainties with the standard GUM method.
4.5. Expected Uncertainties for Efficiency and Power Loss Measurements of Complete Transmission
This section describes the expected measurement uncertainty of the complete transmission. The estimated uncertainties are given only for positive input torque values, as the efficiency and power loss can currently not be calculated in coast mode, during which the load machine drives the transmission. In this case, the power is split between the two sub-transmissions, which is currently impossible to model in the simulation tool used. Therefore, coasting mode is neglected from here on. The expected measurement uncertainties are calculated assuming that the load machines are configured for mid-load experiments to allow comparison between the results of ST1 and the complete transmission.
In regular operation, the transmitted power of each sub-transmission is combined at the differential stage. To improve efficiency, an optimal power distribution between ST1 and ST2 can be calculated for the required total input power. This is achieved with the so-called split factor, which specifies the power split between the two transmission inputs. At a split factor of 1, the required power is supplied solely by EM1, while at a split factor of 0, EM2 provides all the required power. This varying load distribution has to be considered when calculating the estimated measurement uncertainty. However, examinations have shown that the split factor has almost no influence on the measurement uncertainty of the input torque. This can be explained by the dominating uncertainty factors within the input measurement chains, as these are not dependent on the actual torque values but on the operational range of the measurement equipment. Therefore, the split factor is assumed to be 0.5 in all cases.
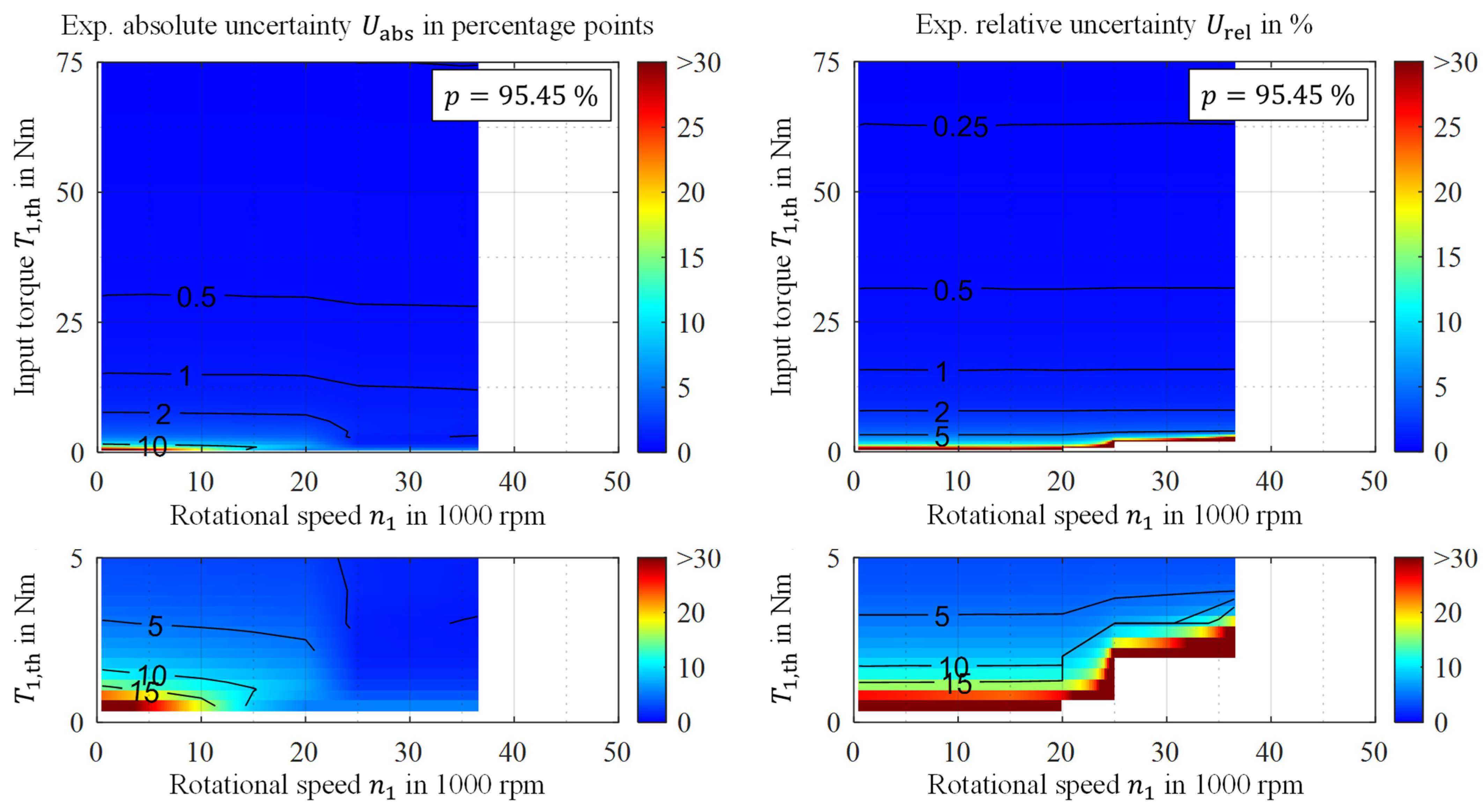
Figure 17 shows the expected absolute and relative uncertainty of the efficiency measurement for the complete transmission in the first speed. For visualization, the input torques of EM1 and EM2 are combined into a theoretical total input torque
at the input of ST1, which would result in the same input power.
The results shown are limited to a range from 0 to approx. 36,500 rpm at ST1, as in the first speed, ST2 reaches the maximum input speed of 50,000 rpm. The estimated absolute uncertainty spans a range from 0.19 percentage points at to a maximum of 35 percentage points at and . The expected relative measurement uncertainty reaches values of less than 0.2% at maximum torque. Close to the region where the calculated efficiency is zero (missing data points on the lower right), the relative expected uncertainty values are very high as the efficiency decreases to zero.
An interesting observation is the abrupt change in absolute uncertainty in the region of 20,000–25,000 rpm. While the absolute uncertainty is mostly independent of the rotational speed above and below this region, a significant uncertainty decrease can be observed, especially at small input torques. It is suspected that the underlying calculation of the power loss causes this phenomenon. Morhard et al. [
18] state that for different circumferential speeds of the transmission components, different approaches to calculating squeezing losses are available. The transition from one approach to the other causes increased power losses, which affects the calculated overall power loss and efficiency. This, in turn, influences the output torque, leading to a change in measurement uncertainty. However, this change does not visibly influence the relative measurement uncertainty, as torque and absolute torque measurement uncertainty are changing simultaneously.
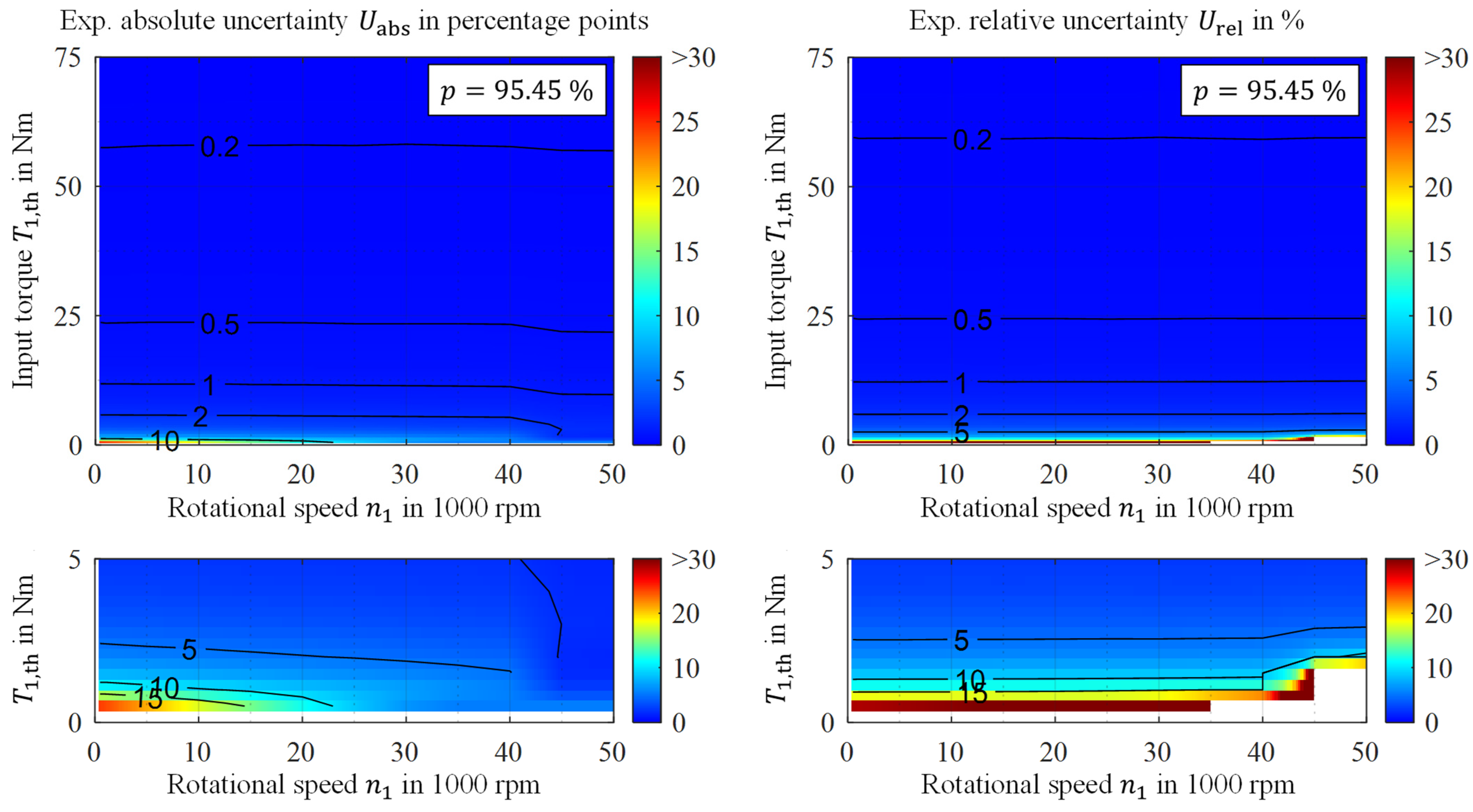
The results of the efficiency measurement uncertainty estimation while ST2 is in the second speed are shown in
Figure 18. The results for the absolute measurement uncertainty also show an abrupt change, similar to the results in the first speed (
Figure 17), but at a higher rotational speed. In the left graph (absolute uncertainty), the change from one calculation approach to the other is also visible, but at a higher range of 40,000–45,000 rpm. The absolute and relative uncertainties are slightly lower than in the first speed, as the smaller gear ratio in the second speed of ST2 leads to reduced output torque.
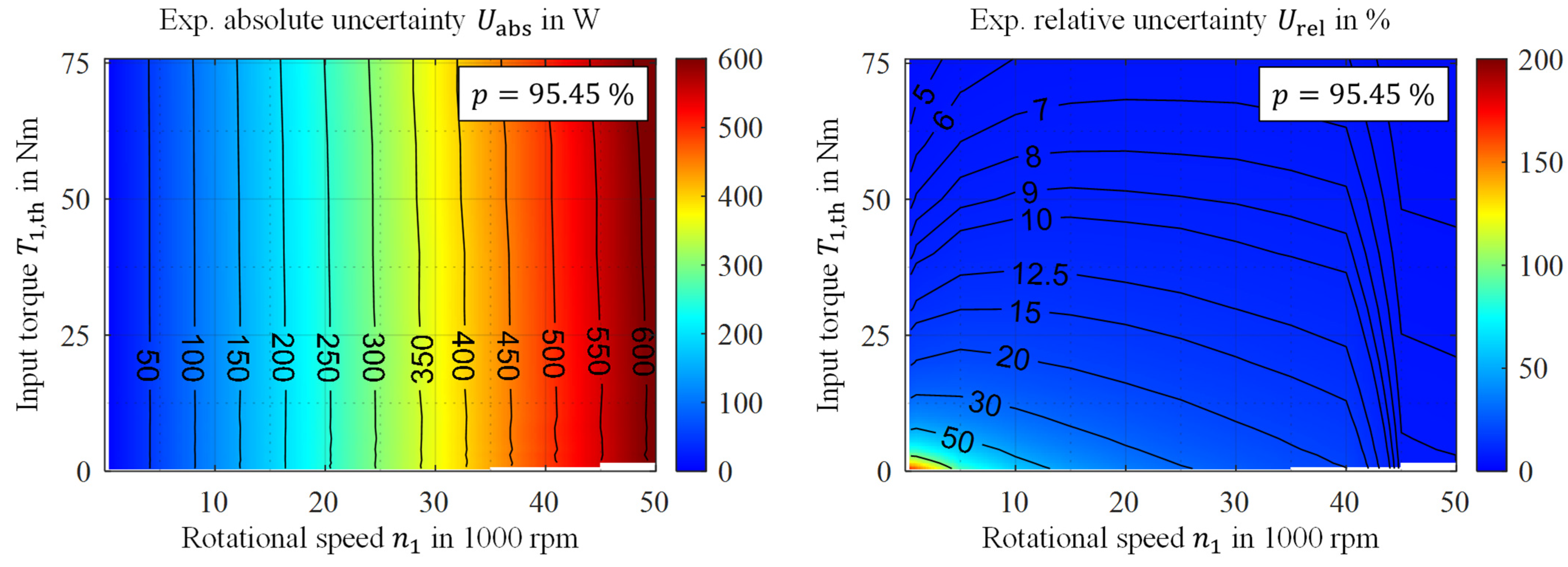
Figure 19 and
Figure 20 show the absolute and relative measurement uncertainty of the power loss measurement in the first and second speeds, respectively. Similar to the results for ST1, the absolute power loss uncertainty for the complete transmission mainly depends on the input speed. It reaches maximum values of 600 W in the first speed and 628 W in the second speed at maximum torque and rotational speed. The relative measurement uncertainty at these operation points reaches its minimum at 3.7% for both gears. In contrast, the maximum values lie at minimal torque and speed (207% in the first speed and 162% in the second speed). The abrupt drop-off of the relative measurement uncertainty at rotational speeds of 20,000–25,000 rpm in the first speed and 40,000–45,000 rpm in the second speed is attributed to the change mentioned above to a different calculation approach of the squeezing losses.
4.6. Measurement Uncertainty for Averaging and Driving Cycles
In the previous sections, the measurement uncertainties are always given under the assumption that only one measurement is taken at each operating point. The uncertainties can, however, be further decreased by averaging over multiple measurements. In this case, if a normal distribution is assumed, the measurement uncertainty can be reduced roughly by a factor of when conducting independent measurements, similar to the calculation of the estimated standard error of the mean (SEM). For a typical measurement scheme, the mean of 600 measurements per minute is calculated for each operating point, resulting in a measurement uncertainty reduced by a factor of approx. 24.5. This factor can be applied to all previously shown results for typical measurement schemes. Of course, this factor is only valid for normally distributed quantities. Nevertheless, it gives a good indication of the potential increase in accuracy when averaging, as the calculated PDFs of the measured quantities are close to normal. In practice, however, the uncertainties of the successive measurements cannot be assumed to be completely independent, so the given factor should be seen as a theoretical lower limit to the measurement uncertainty.
Even though the test rig is intended for measurements in stationary conditions, one can attempt to calculate the measurement uncertainty for efficiency measurements during driving cycle tests. In this case, the rotor inertia of EM1 and EM2 influence the measured input torque, as it causes additional reaction forces at MP1 and MP2. This can be considered a systematic error and can be compensated, as the rotational inertia and the acceleration are known. While this might also introduce random deviations, they are neglected for now, as their magnitude is unknown. The energy consumption of the cycle can be considered another virtual measurement chain, which is the sum of the energy consumption in each time step. The overall measurement uncertainty can be calculated via the Pythagorean Addition of the uncertainties at each time step. For the WLTC Class 3 driving cycle, measurements are taken every second. Assuming the same independent uncertainty at each time step, an uncertainty reduced by a theoretical factor of can be achieved. Based on simulative results for the WLTC cycle using the efficiency data of ST1 of the transmission and a vehicle model, the energy consumption (disregarding the motor and power electronic efficiencies) for the cycle and operating points at each time step were calculated. The calculated overall energy consumption including measurement uncertainty is kWh/100 km (, which is a relative measurement uncertainty of 0.043%. Even though this value does not represent the energy consumption in reality, it indicates the measurement uncertainty to be expected for driving cycle measurements.


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}