1. Introduction
Worldwide vehicle regulations are rapidly evolving in the direction of CO
2 reduction [
1,
2]. This is becoming increasingly relevant for the motorbike market since a growing number of governments are starting to impose stringent constraints on emissions [
3,
4,
5]. Therefore, the application of hybrid technologies to motorcycle engines represents an interesting solution to be investigated in order to reduce fuel consumption and, therefore, CO
2 emissions [
6,
7].
Currently, regulations for motorcycle homologation are less stringent compared to those for cars. This allows motorcycle manufacturers to meet emission standards through the advanced optimization of traditional internal combustion engines. However, real-world examples of electrification exist. While some hybrid motorcycles are available in the market, they remain a niche segment, and in parallel, only a slightly higher number of fully electric applications exists [
8,
9]. This is largely due to the complexity of creating a hybrid architecture for motorcycles, which involves managing the space constraints and costs of integrating both electric and combustion systems.
In a motorbike, mass is a relevant constraint since it heavily affects the riding dynamics, but other constraints are also important. Firstly, the volume available for the installation of additional components is limited, and, given the layout, it is fragmented along the chassis. Furthermore, the cost of electrification is generally proportional to the power or energy capacity installed. Consequently, with high-performance motorcycles with comparable power installed with respect to standard passenger cars, the cost represents a more stringent constraint than that in a car, given the lower market price.
Considering all these aspects, a mild-hybrid (MHEV) application [
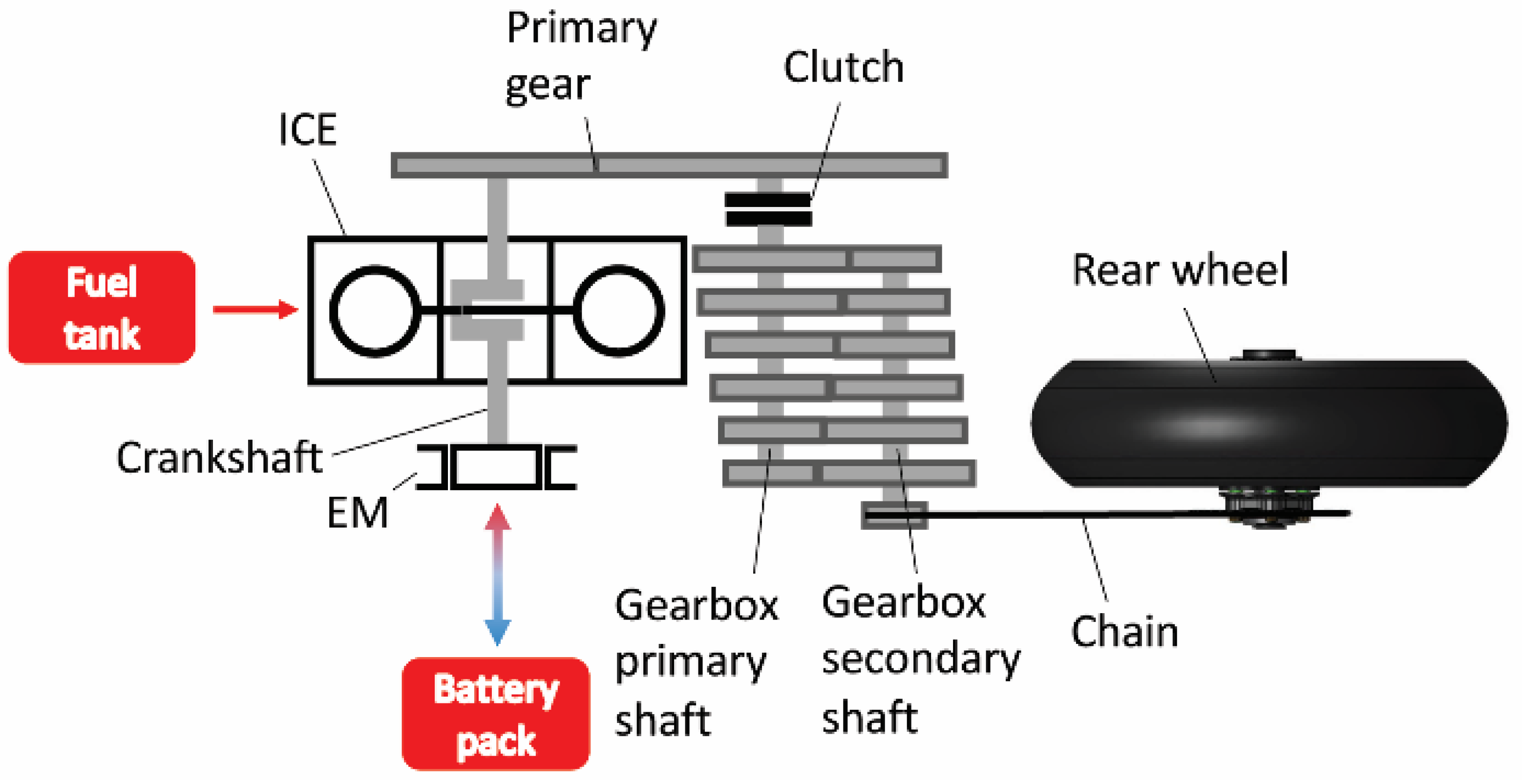
10] might be worth investigating for a possible increase in the powertrain efficiency while limiting the modifications to the motorbike layout and containing the added mass. The minimum devices to be added are the electric motor, battery pack (including the cells, fuses, switches, and Battery Management System), motor controller (inverter), and a possible cooling system. Consequently, the benefits must be significant enough to justify the increased component costs and system complexity of implementing this solution in real-world scenarios.
During the preliminary development phase of a hybrid vehicle, it is important to evaluate the achievable benefit in terms of fuel consumption that can be obtained from the selected architecture. This is crucial in the case of an MHEV motorbike, where, given the lower mass compared to a car, the added mass of the electric components might erode the possible efficiency advantage. Therefore, it would be helpful to simulate the vehicle during a homologation test to estimate the benefits achievable with a possible hybrid architecture.
Homologation test cycles are an important benchmark for the evaluation of emissions since they are heavily regulated in order to obtain comparable results considering different vehicles. Among the various existing cycles, the World Motorcycle Test Cycle (WMTC) is the most relevant since it is used for homologation in many of the most important worldwide markets [
3].
In the literature, many studies on hybrid motorbikes exist, but they are mainly focused on strategy development using different energy management techniques [
11,
12,
13], transmission systems design [
14,
15,
16], and battery pack development [
17,
18,
19,
20]. Furthermore, most of these studies tend to focus on utilitarian 2-wheel vehicles, such as city scooters [
21,
22], where cost is an important constraint but where mass and volume constraints marginally affect the functionality of the vehicle. This study, instead, is focused on the application of high-performance motorbikes, i.e., naked or sport-tourer motorbikes. In particular, the goal is to study a mild-hybrid powertrain to be fitted into an existing motorbike, limiting the number of modifications to be made and estimating the amount of fuel consumption reduction.
Correctly sizing of the components of the power unit (PU) is crucial to achieving the desired results. Therefore, many different configurations are analyzed here considering the same MHEV topology but with different hybridization ratios (HR) [
23,
24,
25], evaluating for each case the possible reduction in fuel consumption and the corresponding mass increase with respect to the baseline internal combustion engine (ICE) motorbike.
In order to evaluate the fuel consumption of a hybrid power unit, an energy management strategy needs to be developed. Since the present contribution focuses on the feasibility of the MHEV architecture and on understanding the relevant factors acting in fuel consumption reduction, an optimal strategy is needed to avoid the influence of the strategy itself on the results.
Several energy management methodologies have been taken into consideration, ranging from simple heuristics [
26] to more complex algorithms [
27,
28,
29] capable of real-time calculations. Dynamic Programming (DP) offers a straightforward approach but requires prior knowledge of the mission, and it is too slow for real-time applications. However, this latter feature does not represent a limit in this study, and considering that the reference homologation cycle taken into account has a prescribed finite time horizon, DP appears to be the best tool to obtain the optimal strategy [
30].
Therefore, DP optimization is executed for each of the different HRs analyzed, and the resulting strategy is used to evaluate fuel consumption throughout the cycle. Fuel consumption is linearly correlated to CO2 emissions; therefore, it has been chosen as the reference parameter to be minimized.
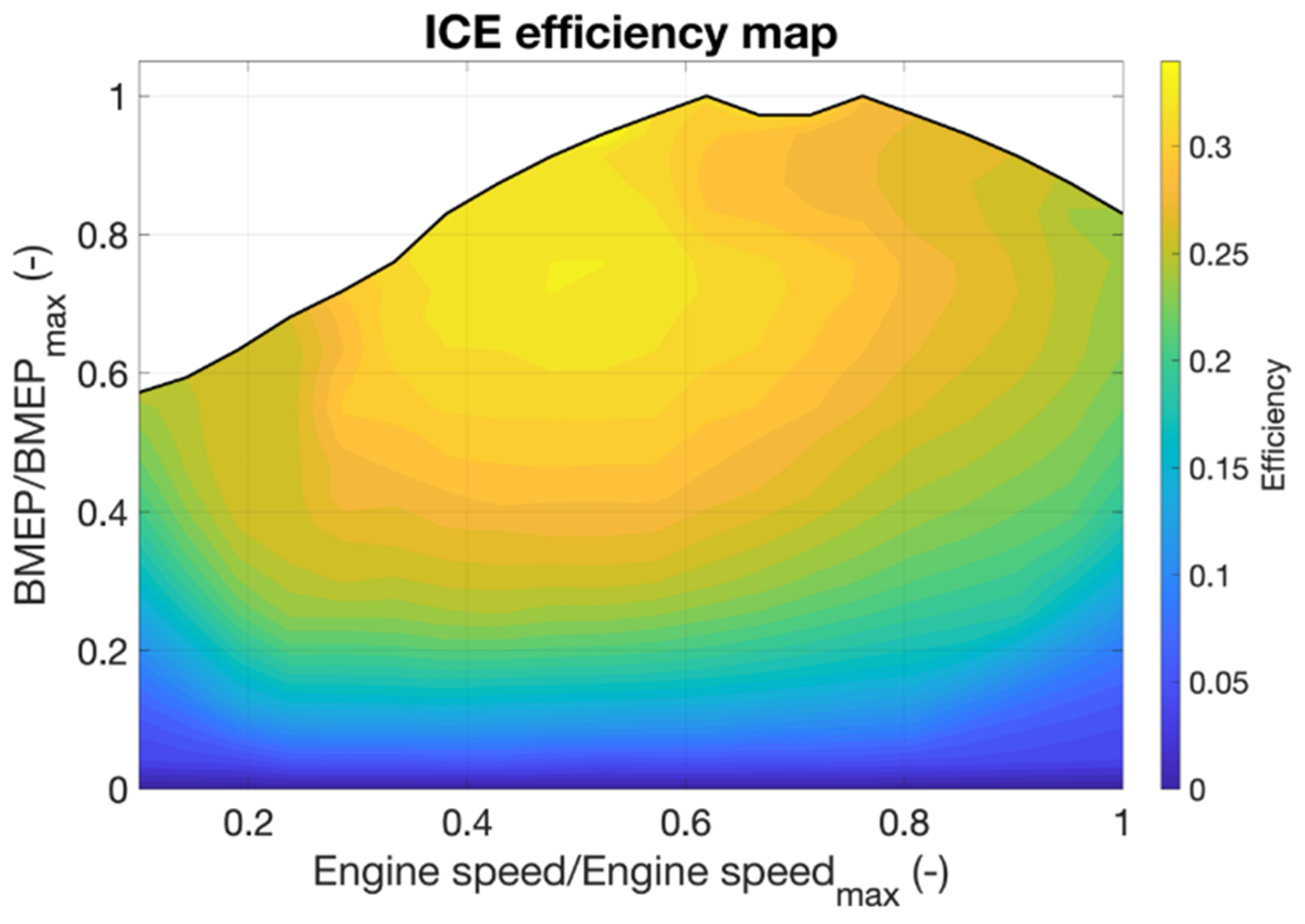
The range of the different HRs has been defined, varying the maximum electrical power of the system, while the ICE power characteristic has been kept constant. This approach has the benefit of keeping the ICE unaltered, enabling the use of an experimentally derived efficiency map of the stock engine. Consequently, all the analyzed PU configurations have slightly different maximum power values, but the differences have negligible effects since the electric motor power for an MHEV is low compared to the ICE power. Furthermore, the maximum power has no effect in this study since the peak power of the motorbike is never reached in the WMTC.
The different ways in which the MHEV topology can increase the overall power unit efficiency have been analyzed in depth. In fact, the MHEV topology offers three main ways to possibly reduce fuel consumption:
The third bullet point refers, for example, to the starter motor removal or to the possible electrification of the water and/or oil pumps. These modifications are more related to mass and cost reduction, and their direct contribution to fuel consumption reduction is estimated to be limited compared to the other two. Therefore, this study is mainly focused on the estimation of the influence of kinetic energy recovery and on the shifting of the ICE operating point. Another important consideration to be made is the impact of losses in the electrical components. In fact, while these losses can be neglected in the preliminary design and sizing of the system, an analysis of their impact cannot be completely disregarded when analyzing the feasibility and convenience of the adoption of this technology. Moreover, this sensitivity analysis is also useful for setting an efficiency target for the design of electric components.
The paper is organized as follows. In the next section, the MHEV topology and the proposed system layout are described. Subsequently, the model used in this study is introduced. Specifically, it emulates the motorbike under the same conditions it experiences during a homologation test, and, as shown in the following, its validation is presented for the case of the pure ICE version of the motorbike. Then, the DP algorithm used is presented along with the constraints applied. Many different PU configurations, differing in their HR, are presented and compared in terms of total mass increase and fuel consumption reduction in order to define optimal sizing. Then, the optimized configuration results are analyzed, highlighting the effects of different factors impacting fuel consumption in an MHEV architecture. Finally, the results are compared and discussed, and conclusions are drawn.
4. Results
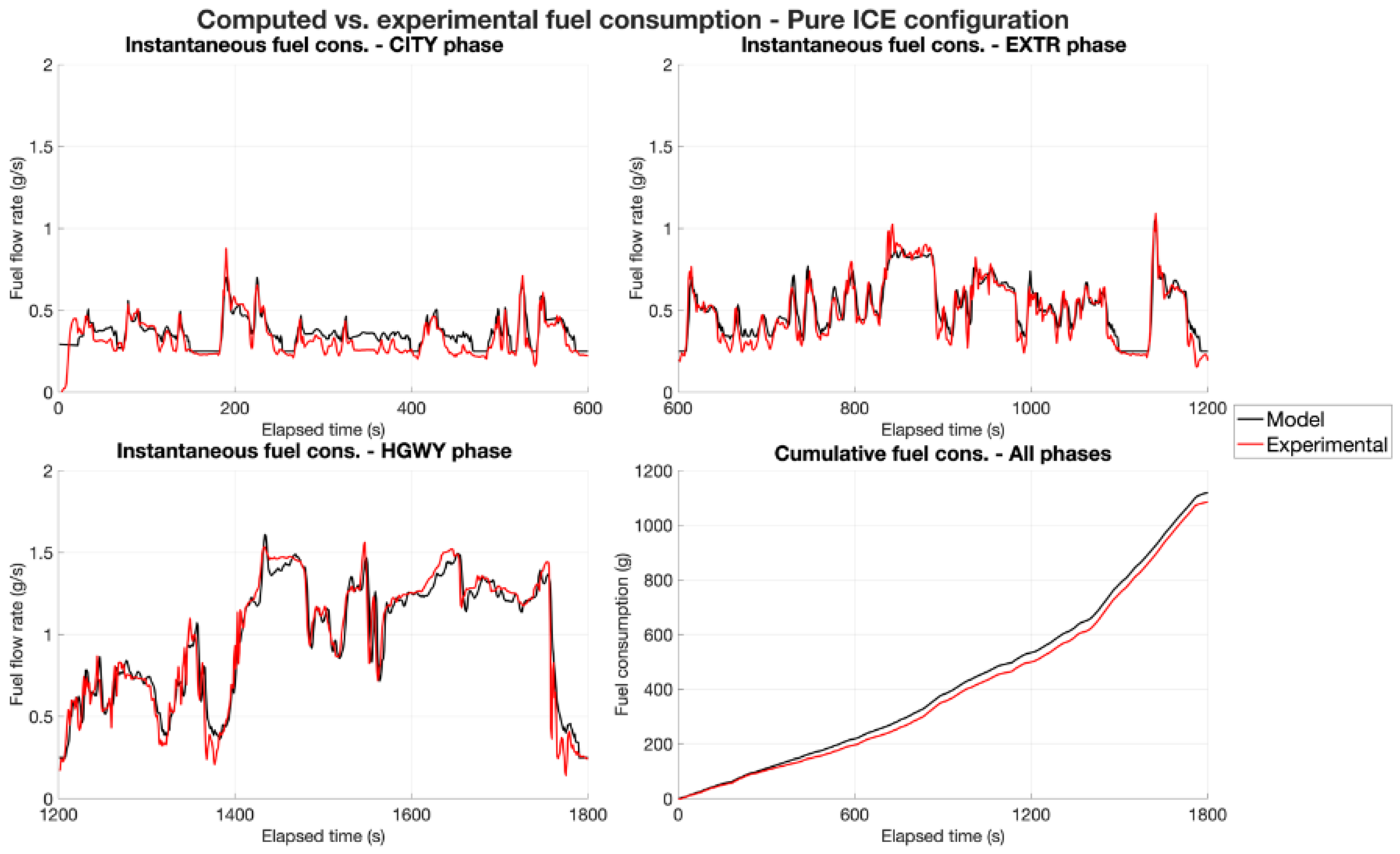
For all the configurations selected in
Table 1, the instantaneous and the total fuel consumptions have been computed after optimizing the strategy using the DP algorithm. The computation algorithm procedure is described below.
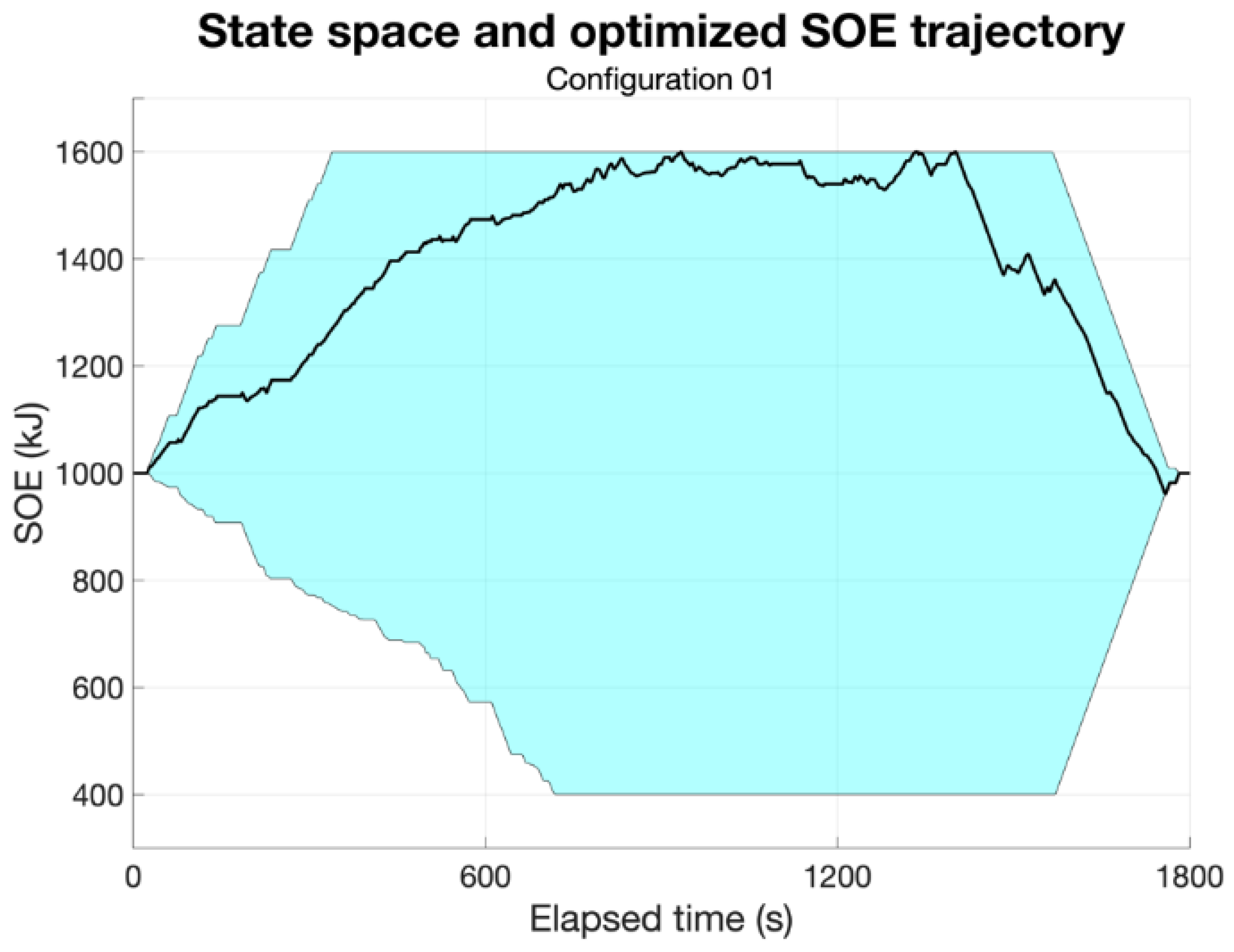
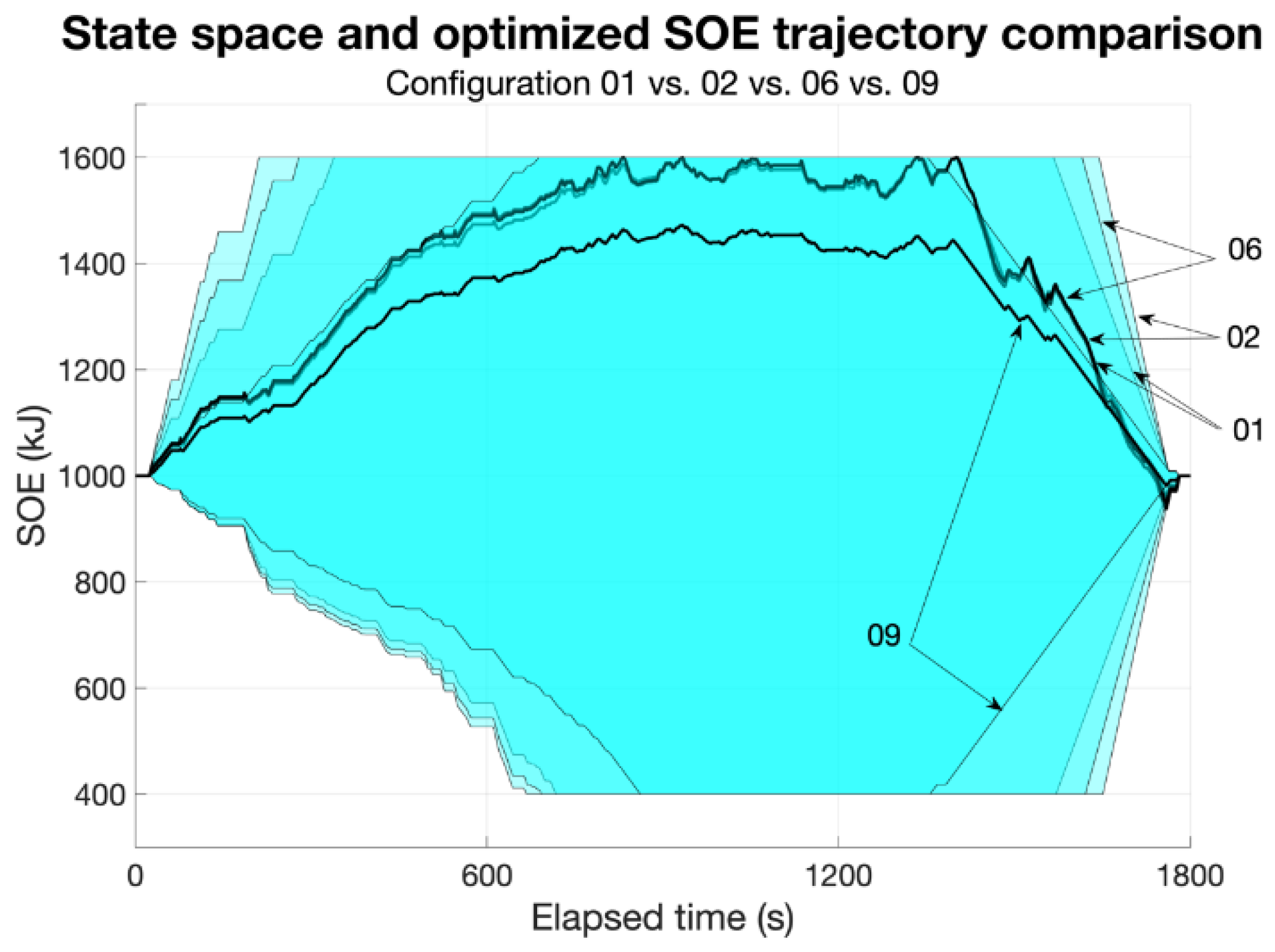
At the beginning of the simulation, the state space is calculated (cyan area in
Figure 7). This is obtained by considering the electric power limits starting from the initial SOE. Therefore, the maximum increase and decrease in SOE for every timestep depends on the instantaneous operating envelope of the EM and the upper and lower SOE limitations, as described in the “Constraints” subsection.
Figure 7 shows that in the CITY phase, the average available charging power is higher than the average available discharging power (slopes of the boundary of the state space on the left). This is due to the low average value of the required power,
. On the other hand, in the HGWY phase, the average value of
is higher than the charge and discharge power limits. Therefore, it is possible to utilize the whole EM power envelope, and thus, the slopes exactly represent the EM size (right boundary of the state space). Approaching the end of the cycle, the maximum and minimum values of the SOE are then limited to ensure landing at the prescribed target.
Then, DP strategy optimization is performed, and the optimized SOE trajectory along the cycle is shown for Configuration 01 (black curve in
Figure 7). This trajectory shows an SOE increase in the CITY phase, an SOE hold in the EXTR phase, and a discharge down to the target SOE in the HGWY phase, and this trend is common for all configurations. In fact, in the CITY phase, the ICE operates in a remarkably low-efficiency zone of the map. Therefore, it is more convenient to increase the engine load and shift the operating point to a higher-efficiency zone. Of course, at this operating point, the PU delivers more power than required, but the excesse energy can be stored in the accumulator. The instantaneous fuel consumption increases, but the energy is converted more efficiently, and the stored energy can be used in the next phases. In the HGWY phase, the instantaneous fuel consumption is quite high because of the high power required; therefore, reducing the engine load and using most of the previously stored energy in this phase is particularly advantageous.
For the aim of this article, the comparison between the different phases of the WMTC in different configurations needs to be analyzed in terms of fuel consumption. In particular, each configuration has been compared to the baseline ICE configuration, evaluating the fuel consumption reduction with the proposed MHEV architecture.
Table 2 shows the results for all the configurations tested along the whole WMTC, while
Table 3,
Table 4, and
Table 5 show the results split for the CITY, EXTR, and HGWY phases, respectively. Note that the DP optimization has been run for each configuration considering the whole cycle and not split in each single phase.
Looking at each phase separately, it is clear that low-power/low-capacity configurations provide a considerable advantage in the CITY phase. This is due to the lower mass added since, in this phase, the amount of acceleration is higher due to a considerable amount of stop-and-go, which makes a higher mass more penalizing. Another key factor is that the average power required in this phase is comparable to the electric power of the low-power configurations.
On the other hand, high-power/high-capacity configurations show an important advantage in the HGWY phase. This is due to the average power required, which is much higher than that required in the other phases. A higher capacity helps to provide a good amount of energy to spend in this phase. In this case, a higher mass related to the higher capacity of the accumulator is not penalized because of the lower values of acceleration that characterize the HGWY phase.
4.1. Kinetic Energy Recovery Contribution
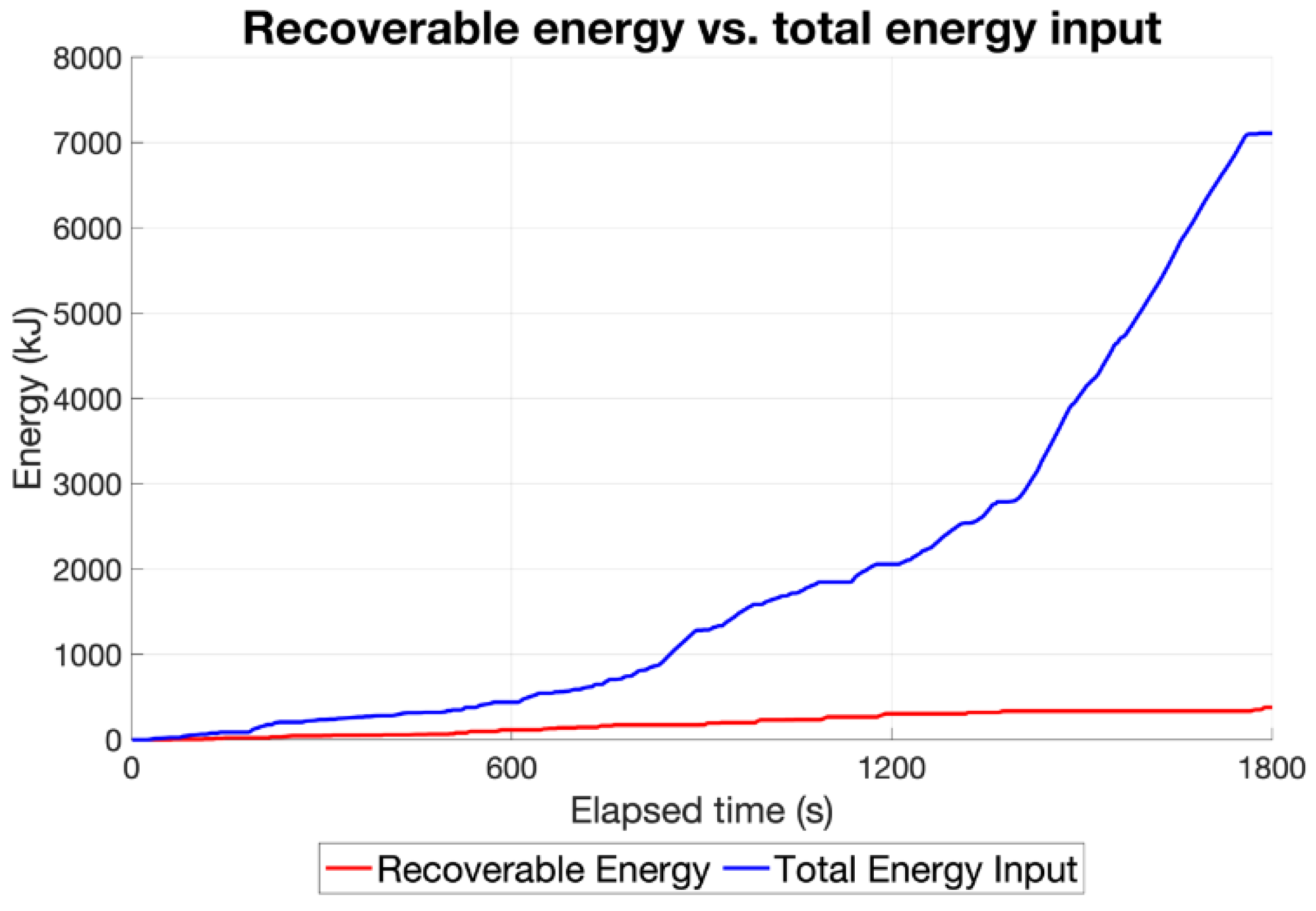
To understand the potential for kinetic energy recovery, it is necessary to evaluate the quantity of energy at stake during the homologation cycle. The resisting force also acts during the slow-down phases, thus reducing the amount of energy that can be recovered. Therefore, it is necessary to estimate the power flows in order to properly calculate the energy levels, rather than simply calculating the kinetic energy of the motorbike.
This analysis shows an order of magnitude difference along the cycle between the energy delivered by the powertrain and the energy dissipated through the brakes. The latter represents the total energy available for recovery and is indeed ca. 5.3% of the total energy delivered by the powertrain (
Figure 8).
An important consideration for motorbikes is the fact that, with this topology, recovery can be achieved only through the rear wheel. The rear wheel generally transfers only a small part of the braking power due to the high load transfer during braking and dynamic stability issues. Consequently, the amount of energy that is actually recoverable, in practical terms, needs to be reduced by at least half in the best-case scenario. All these considerations have led to the conclusion that kinetic energy recovery is not a significant advantage in an MHEV motorbike. A small amount of energy can always be recovered once the system is installed on a motorbike, which increases the overall efficiency of the system; however, this increase is marginal.
4.2. Load-Point Shifting Contribution
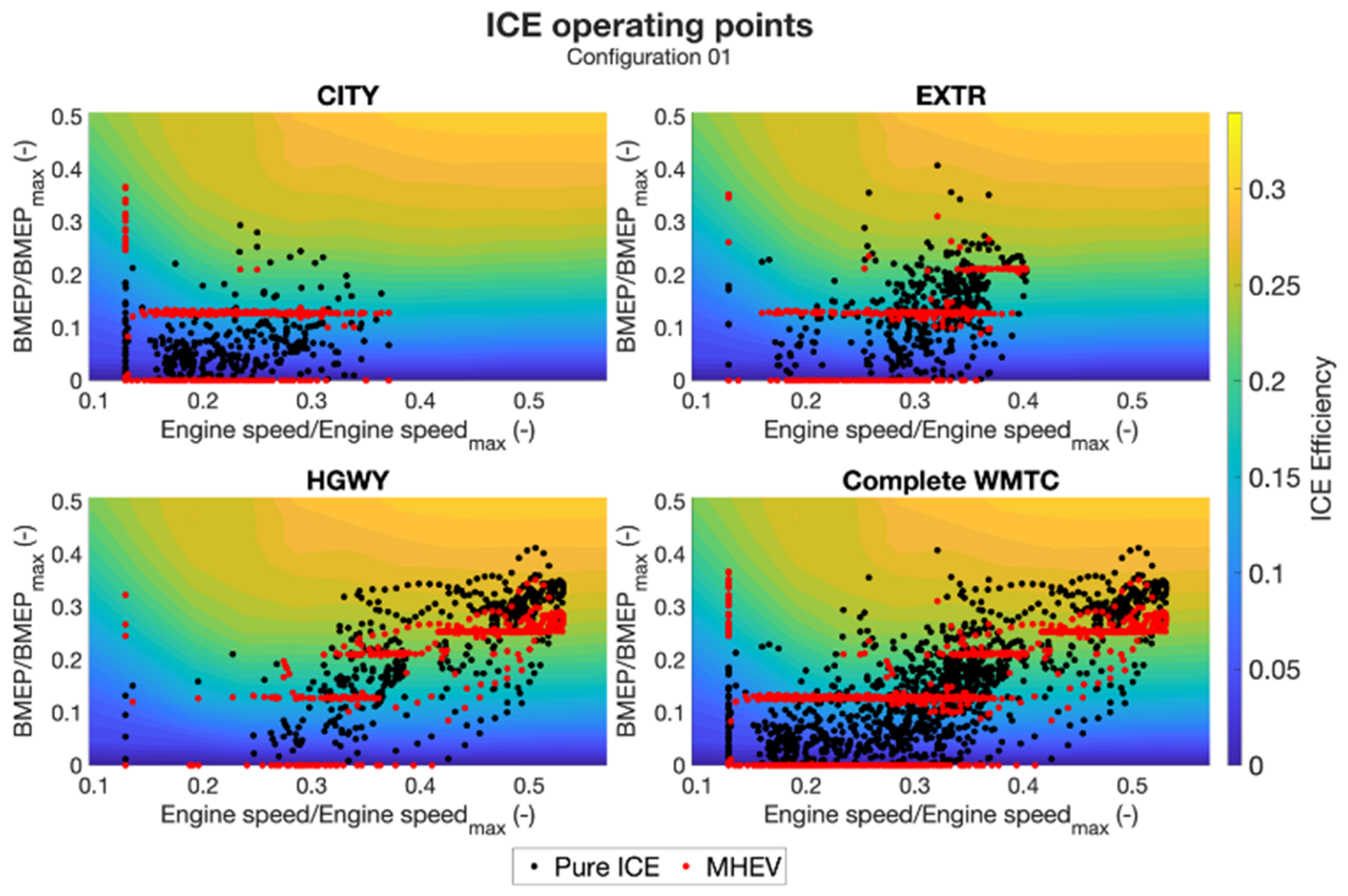
In this section, the effects of the adoption of a load-point shifting strategy are discussed. In
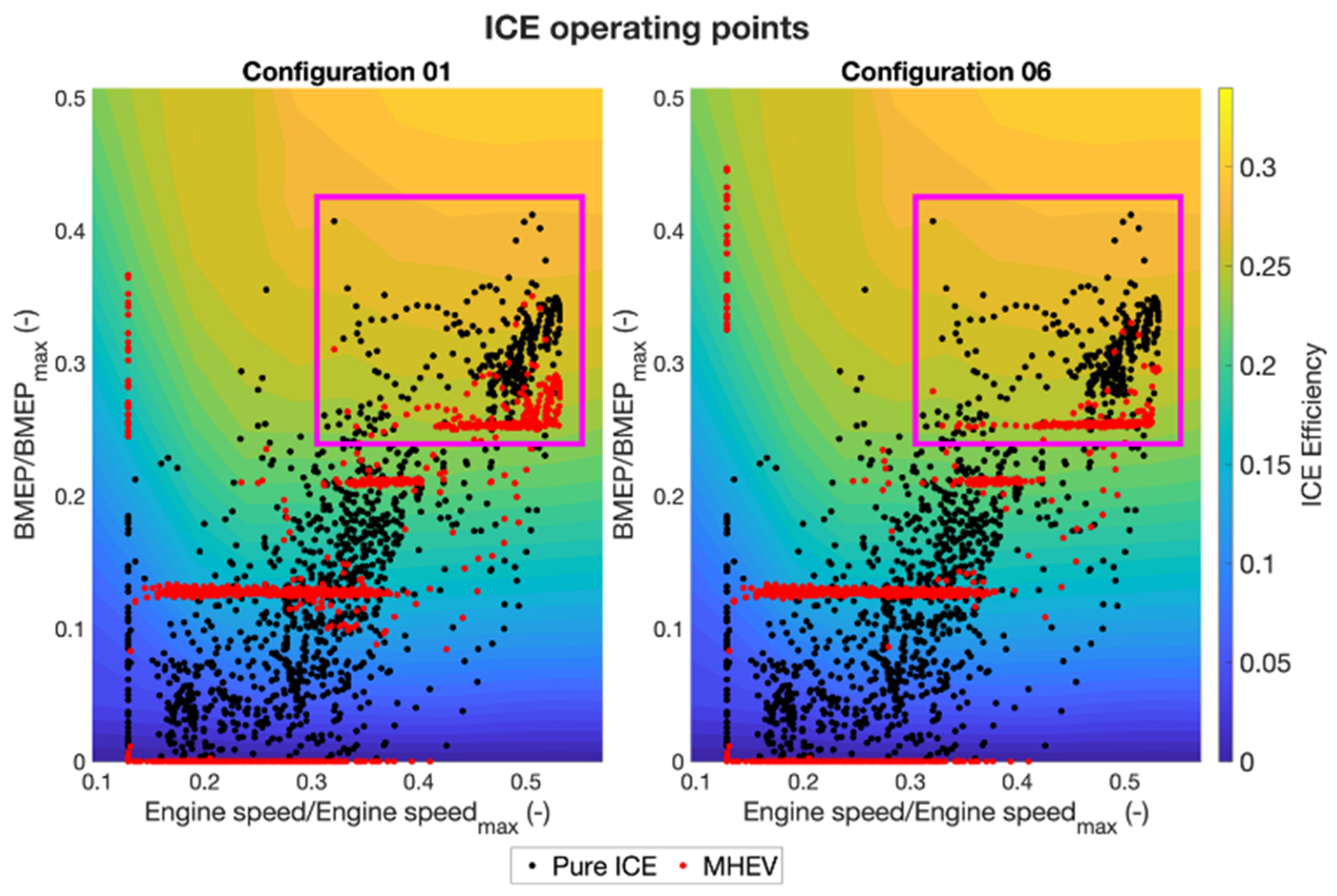
Figure 9, the operating points of the ICE are shown for both the pure ICE (in black) and MHEV configurations (in red). Configuration 01 has been chosen as an example. For the sake of clarity, the results are subdivided into the three phases of the cycle, but a complete cycle chart is also shown. In the CITY phase, most of the operating points are condensed to a single BMEP level. In this phase, the ICE is operating at a higher load than required by the road load. A specific level is selected by the algorithm considering the EM operating envelope and represents the most efficient reachable operating point for the given engine speed and deliverable torque.
In particular, a single operating point can be shifted by considering the maximum power of the EM in a specific configuration. Similarly, in the other phases, where the power delivered is higher, different levels can be selected.
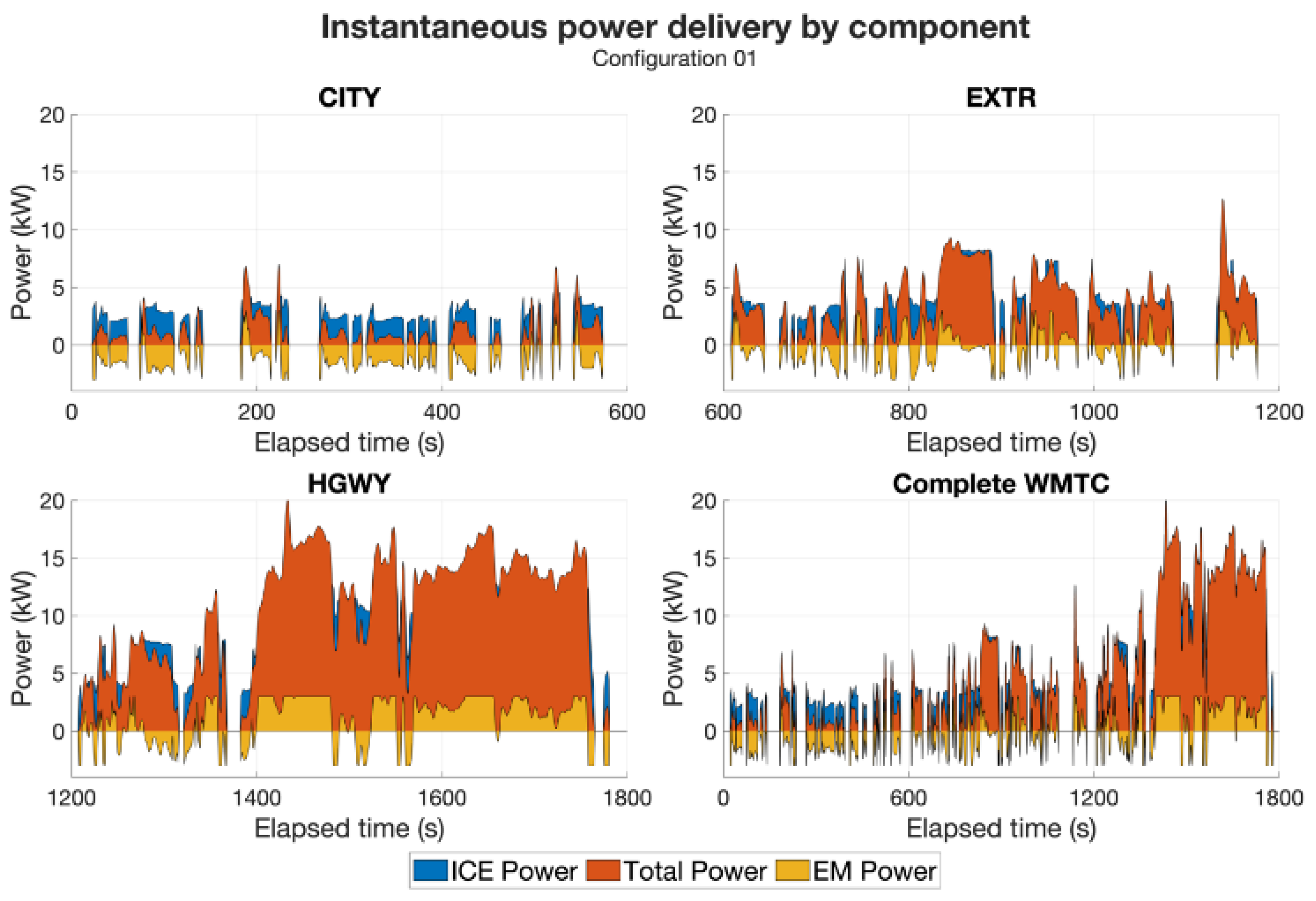
Figure 10 shows the instantaneous power delivery from the ICE and EM compared to the instantaneous total power delivery. It is possible to clearly identify the previously discussed trends in harvesting energy in the CITY phase and using it in the HGWY phase. In fact, looking at the instantaneous EM power, it is mostly negative in the CITY phase and mostly positive in the HGWY phase.
4.3. Effects of the EM Size
In this section, the effects of EM size on the results are discussed. A first consideration is that having a maximum EM power close to the average power used in the cycle, i.e., 4 kW, seems to be a good design starting point because it provides the DP algorithm the freedom to always choose the most convenient ICE operating point. This is clearly shown when analyzing configurations 01 and 06 (comparison in
Figure 11), with the former having 3 kW EM power and the latter 4 kW, with the same accumulator capacity. The highest power operating points in the cycle, in configuration 01, are not condensed onto a single BMEP level, while they are in configuration 06.
From this comparison, it can be deduced that the level of power of configuration 06 is enough to allow the strategy to have maximum freedom in choosing the operating point of the ICE; having more electric power might help slightly in harvesting energy when possible, but would also add mass which is a penalty in the CITY phase and in general for a motorbike.
Other considerations can be made by making a comparison between the configurations with the same accumulator capacity but different EM power levels, as shown in
Figure 12.
It is clearly visible that the configuration with the lowest power (09) has a different SOE trajectory compared to the other three configurations, which instead appear to be remarkably similar. Therefore, it seems unnecessary to increase the EM size above the 01 level of 3 kW with the same accumulator capacity. Combining the considerations from
Figure 11 and
Figure 12, it can be inferred that the maximum size of the EM should be in the range between 3 kW and 4 kW. However,
Table 2 does not show a significant variation in fuel consumption between the two aforementioned EM sizes, while
Table 1 shows a significant mass increment moving from 3 to 4 kW EM size. Therefore, a solution with a 3 kW power level appears advisable.
4.4. Effects of Accumulator Sizing
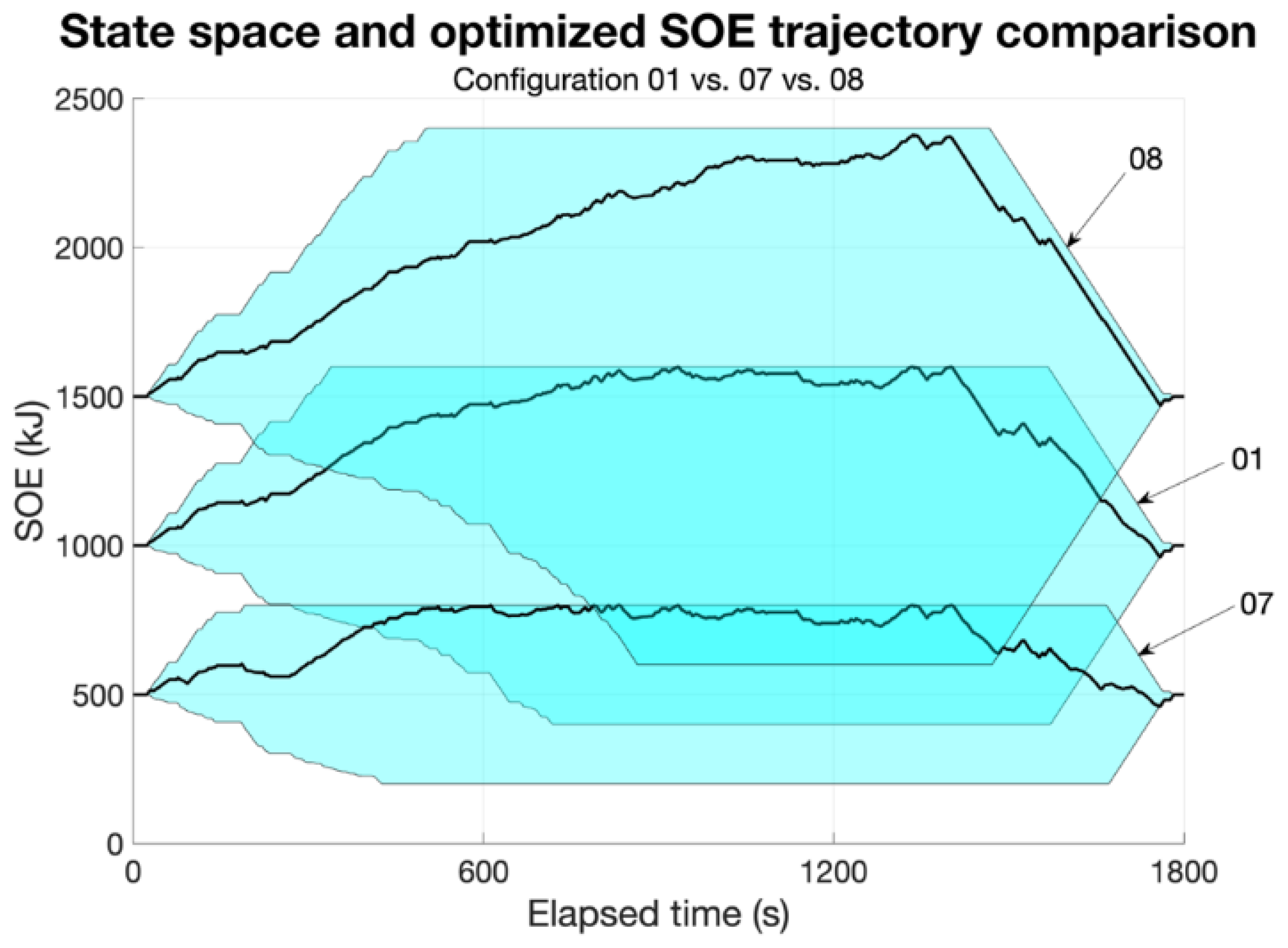
In this section, the effects of accumulator sizing are discussed. In
Figure 13, three different configurations using the same EM power but different accumulator capacities are compared: configurations 01, 07, and 08. In particular, the vertical extent of the cyan area (
Figure 13) for each configuration represents the storable energy within the accumulator. A larger area is correlated with a higher capacity for both charging and discharging the battery. This increased capacity enhances the potential for energy storage and utilization efficiency. The lowest capacity configuration (07) appears to be heavily limited in these terms. In this case, the optimized SOE path (black curve in
Figure 13) reaches the maximum SOE limit very early during the simulation, failing to provide sufficient flexibility for the ICE load-point shifting strategy. Conversely, the higher capacity configurations (08 and 01) appear more promising in terms of strategy optimization. In particular, configuration 08 harvests ca. 50% more energy than configuration 01. However,
Table 2 shows that the difference between configurations 01 and 08 is almost negligible in terms of the fuel consumption reduction. In fact, the optimized SOE path (black curve in
Figure 13) of configuration 08 almost reaches the upper SOE limit close to the end of the simulation, thus proving that part of the storable energy remains unused for most of the cycle. This means that an excessively large battery adds unnecessary weight to the vehicle, which cannot be compensated for by the utilization strategy and, consequently, can negatively impact the performance and the efficiency of the system. Therefore, at least with this level of EM power, increasing the capacity above the 01 level is not advisable since that would lead to an unnecessarily heavier motorbike.
4.5. Optimized Configuration Selection
It is necessary to examine all these analyses to select the best configuration, which might also yield contrasting results. For example, comparing Configuration 01 to Configuration 06, the increment in the maximum electric power reflects more freedom in the load-point shifting strategy, as stated before, giving a slight advantage to Configuration 06 in the EXTR and HGWY phases. On the other hand, the SOE trajectory is almost identical for the two configurations, suggesting that the energy fluxes are very similar along the cycle, and therefore giving a slight advantage to Configuration 01, which has a lower mass. Finally, looking at the mass increment (
Table 1) and global fuel consumption reduction (
Table 2), Configuration 01 has a slight advantage over Configuration 06 in the WMTC cycle. Overall, the most promising configurations appear to be 01, 06, 08, and 12, as they offer the maximum fuel consumption reduction. Further increases in the EM power or accumulator capacity do not seem to offer any advantage in this cycle. Of all these configurations, considering that the total fuel consumption is very similar, it would be advisable to choose the lowest mass increase configuration, which would also limit the cost and volume of the system.
4.6. Effects of Round-Trip Electric Efficiency
In this final section, the impact of the losses due to the electrical components is investigated. These losses have not been considered until this section since the goal was to find the maximum possible benefit for an MHEV application. In order to increase confidence in the results shown in the previous sections, however, it is worth evaluating the impact of these losses on the final results in terms of fuel consumption. To do so, a sensitivity analysis has been performed on a wide range of electric efficiency values.
Since all the electrical components have been modeled as ideal, a single value of efficiency has been chosen to represent all the losses of the electrical system of the PU. This value represents the round-trip efficiency, so it has been applied to the energy stored in the accumulator and to the energy retrieved from the accumulator.
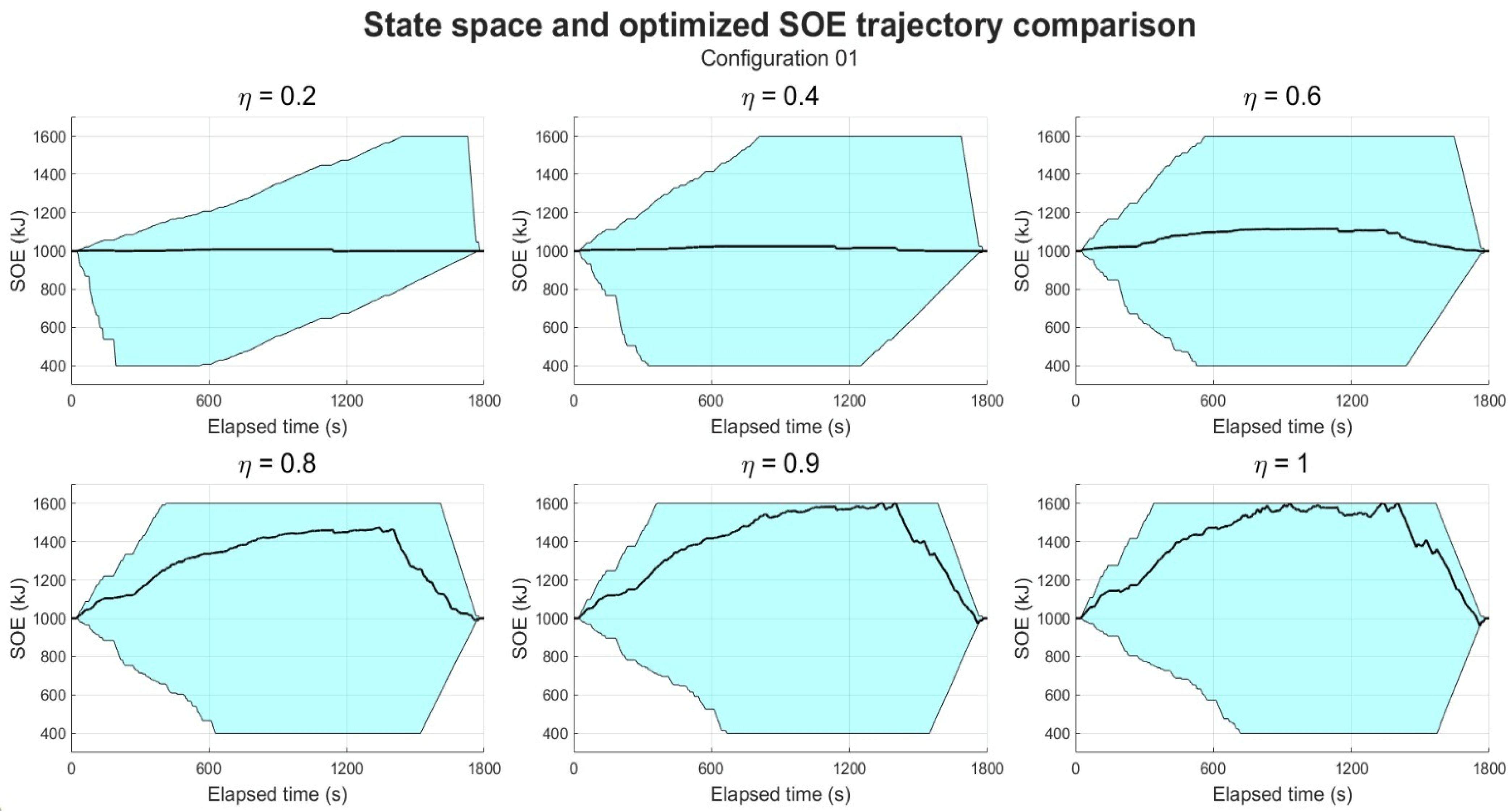
In order to better understand the impact of these losses, Configuration 01 has been used as a basis for a series of simulations. Different efficiency values have been applied, starting from 100% efficiency, which is the case reported in the previous sections, reduced to 90%, 80%, 60%, 40%, and 20%, as shown in
Figure 14, which compares the results of these simulations.
Firstly, it can be noted that the state space varies significantly between the different cases. In fact, being equal to the mechanical power developed by the EM, the application of the round-trip efficiency modifies the amount of power flowing to or from the battery; therefore, the slope of the borders of the state space is modified accordingly. For example, in the simulation with 20% efficiency, the maximum SOE can only be reached in the highway phase, while it can be reached in the city phase with 100% efficiency. Conversely, the minimum SOE can be reached in the first 200 s of the simulation with 20% efficiency, while it can only be reached in the extra-urban phase with 100% efficiency. Another important result to note is the fact that the optimization algorithm chooses very different paths for different efficiency values. With lower efficiency, the algorithm progressively reduces the usage of the electric system, asymptotically tending to zero usage for a hypothetical 0% efficiency. In practical terms, the usage of the electric system is already almost negligible for an efficiency lower than 40%. It is also worth noting that there is a significant step in the usage of the electric system between 60% and 80% efficiency, with the latter appearing to be a practical lower efficiency limit in order to have a meaningful application of the MHEV technology.
Table 6 presents a sensitivity analysis designed to cover a wide range of values, including those that may not be entirely plausible. This approach is intended to test the robustness of the methodology and assess the feasibility of the proposed system.
Table 6 shows the results of the different simulations in terms of the total fuel consumption variation. These results appear to confirm that 80% efficiency is the lowest acceptable value in order to have a meaningful fuel consumption reduction. It is also worth noting that an increase in the total fuel consumption is registered for low-efficiency values (lower than 60%) since the electric system is not exploited, but its weight negatively affects the performance and efficiency of the motorbike.
From the literature, a rough estimation of the efficiency of the electric system might consider a 1% loss for an IGBT inverter (both in discharge and recharge) [
45], a 4% average loss for the EM (also both in discharge and recharge) [
46], and a 5% round-trip loss for the lithium-ion accumulator. Consequently, the total efficiency can be evaluated as the combination of inverter efficiency (99%), EM efficiency (96%), and accumulator efficiency (95%), thus resulting in an overall efficiency of the electric drive system of about 90%. This target appears to be reachable in real-world applications [
47,
48].
5. Conclusions
The goal set for this paper was to study the feasibility of the application of MHEV technology to an existing motorcycle and evaluate its impact in terms of fuel consumption and, therefore, CO2 reduction. The sizing of the electric components of the power unit is of crucial importance; therefore, a study of different configurations in terms of electrical power and accumulator capacity has been performed. Dynamic Programming optimization has been employed to eliminate the influence of the particular strategy on the results. Electrical components have been initially modeled as ideal machines, with no losses, to exclude this factor from the results. However, the first principle design considerations have been applied in order to estimate the overall dimensions of the electric machine and accumulator in terms of volume and mass. The existence of an optimal size for the electric motor and accumulator has been discussed. A rule of thumb for electric motor sizing for mild-hybrid applications can be established. In particular, a maximum electric power near the average power required by a specific driving cycle appears to be the best compromise. This procedure and rules can be applied to different motorbikes with different engines and masses to obtain the optimal sizing of the power unit components. In the end, the effect of the electric system losses has been investigated, and an efficiency target for the design of the system has been established.
The applicability of the MHEV technology to an existing motorbike has shown a reduction in terms of CO2 emissions. However, the actual industrialization of the product requires further validation steps, such as producing a prototype of the motorbike to experimentally validate the possible fuel reduction and a cost/benefit analysis in comparison with other possible ways to increase the overall efficiency of the powertrain. Further developments on the optimized configuration in terms of packaging revision for the entire motorbike are planned.
This methodology can also be applied to different hybrid architectures, allowing for a rapid preliminary estimation of possible advantages in terms of fuel consumption reduction and overall efficiency increase. For example, a parallel analysis is ongoing and is focused on a possible fully hybrid architecture.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}