
iLDM: An Interoperable Graph-Based Local Dynamic Map

 , ,
, ,  ,
,
Abstract
:1. Introduction
- Centralisation of descriptive scene information in real time;
- Harmonisation of format and interfaces;
- Compatibility with standards.
- Time-to-collision estimation;
- Vehicle discovery service (VDS);
- Out-of-road prediction;
- Online manoeuvre/scene annotation;
- Lane change assist;
- Parking assistant.
- Proposing the use of the new OpenLABEL standard as a common data source and making the iLDM interoperable across different domains and data sources;
- Using a graph-based database against the usual RDBMS approaches;
- An LDM architecture suitable for real-time use due to the fact of its data insertion and querying response time.
- Numerical analysis of the iLDM’s performance for data insertion and retrieval.
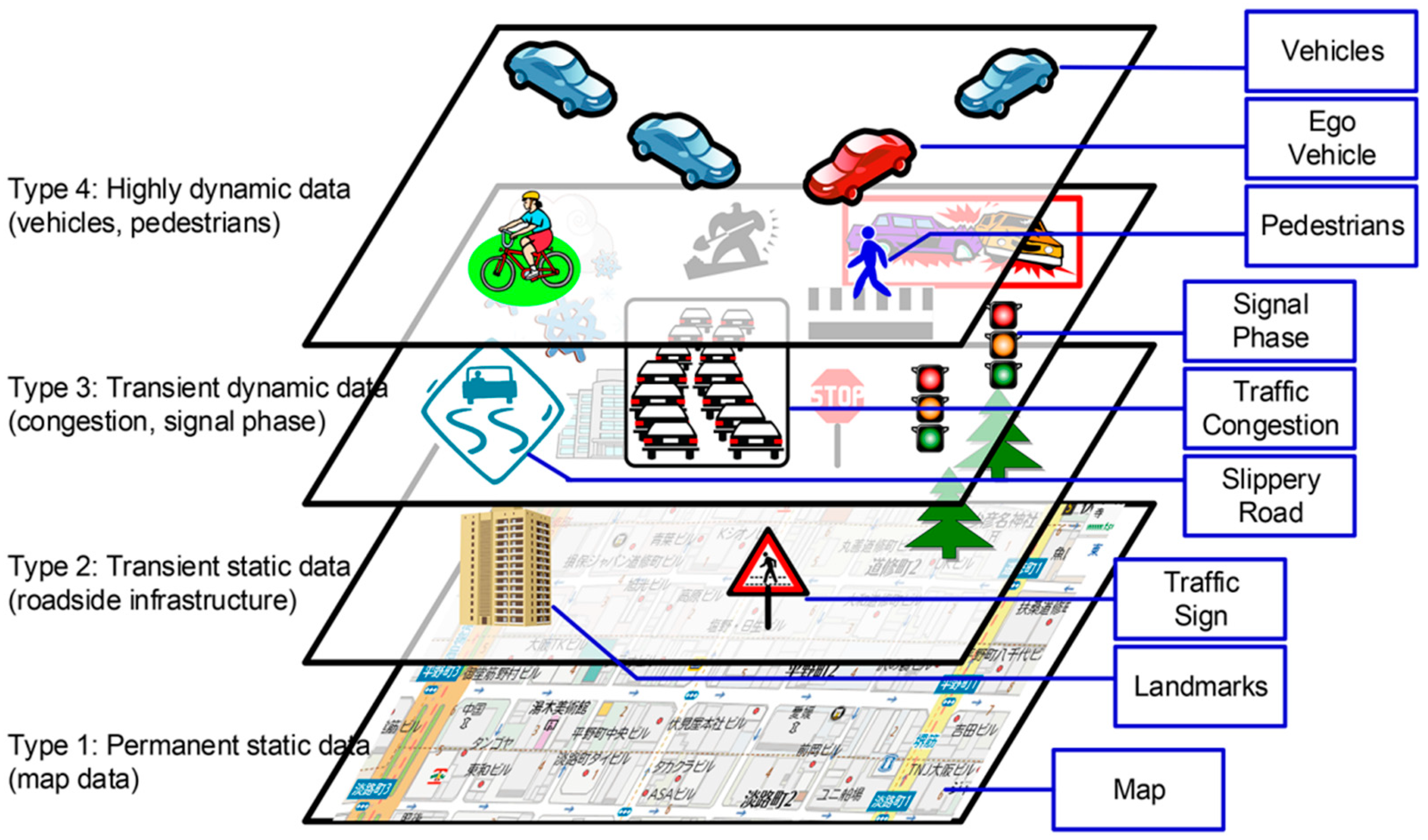
2. Related Work
- Layer 1 (static): permanent static data (map data with road topology);
- Layer 2 (quasi-static): transient static data (traffic signs, buildings and roadside infrastructure);
- Layer 3 (transient): transient dynamic data (congestion information and signal phases);
- Layer 4 (dynamic): high dynamic data (position of pedestrians, vehicles and ego-vehicle).
3. iLDM Architecture
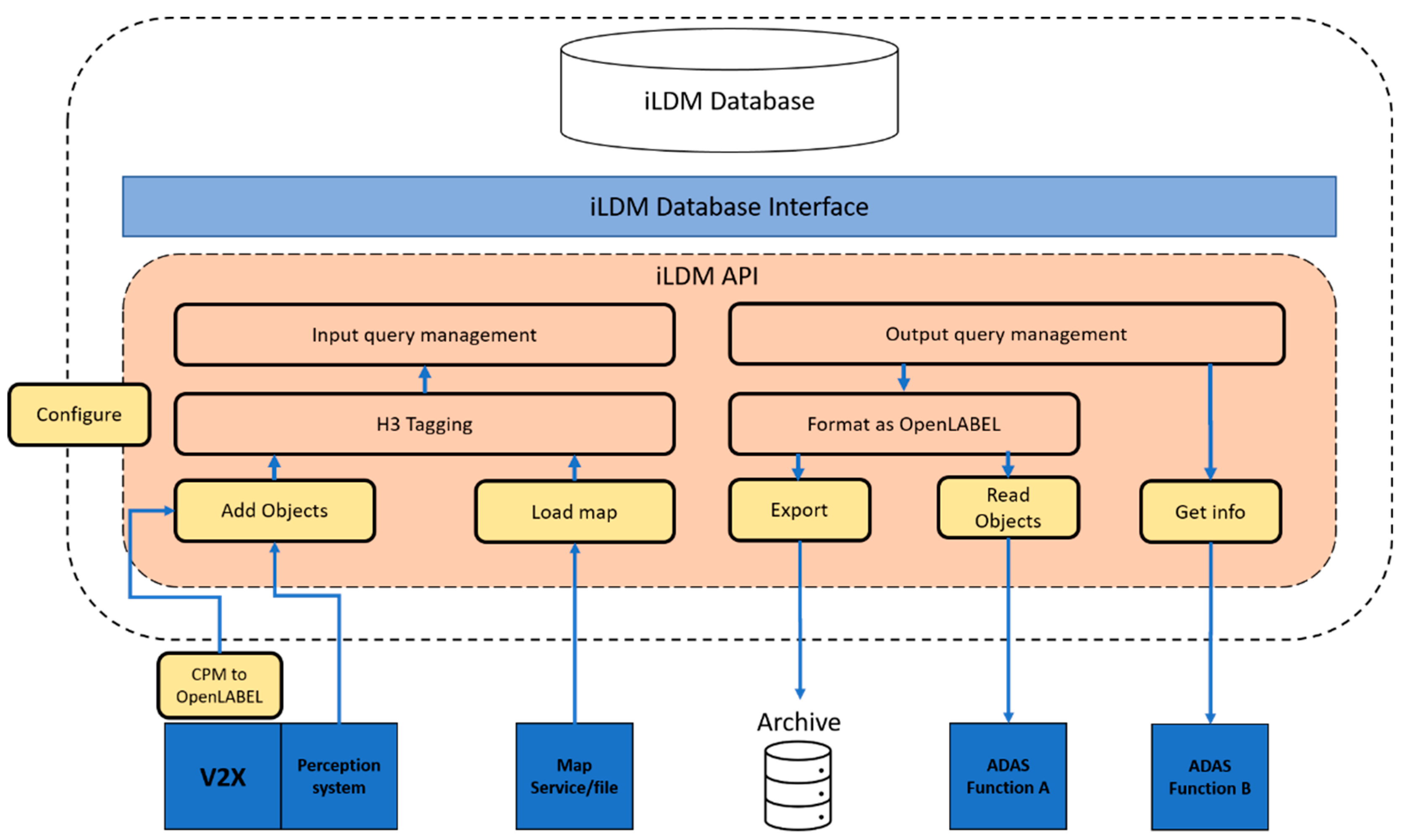
3.1. Functional Architecture
- iLDM database: the database that stores the static and dynamic information;
- iLDM database interface: the interface of the database to perform CRUD (create/read/update/delete) operations;
- iLDM API: the set of exposed functions to interact with the database including input and output interfaces. Internal functions provide the necessary mechanisms to organise and convert the information into the LDM layers. Six main exported functions are considered:
- Configure: configures the parameters of the iLDM such as time-to-live (TTL) values and filtering routines;
- Add objects: introduces new or updated information about dynamic objects;
- Load map: introduces new or updated information about map elements;
- Export: retrieves sets of information for certain time intervals to store in a file system or archive;
- Read objects: retrieves real-time information about certain elements at certain time instants or intervals;
- Get info: retrieves statistics or information about the status of the database.
- Map service/files: digital map information received from an online service or as offline (pre-downloaded) files to fill in the lower layer (static data) of the iLDM stack;
- Perception system: local system inside the ego-vehicle that perceives information on the surroundings as a list of objects or a similar representation. Conversion to OpenLABEL format is required prior to its ingestion into the iLDM;
- V2X: communication system that receives messages (e.g., ETSI CAM and CPM messages) from exterior perception systems (e.g., other vehicles). Conversion from CPM to OpenLABEL is needed to ingest information into the iLDM.
- Archive/data logging: the iLDM component accumulates dynamic information in time. A clear-up policy, set-up during configuration, might establish that information older than a certain threshold is periodically removed. Archiving into local or remote file systems can help prevent loss of information;
- ADAS/AD functions: the second type of application that reads from iLDM is any ADAS/AD function that needs to read synchronised and calibrated information about dynamic objects and their position or relation with the underlying static layers.
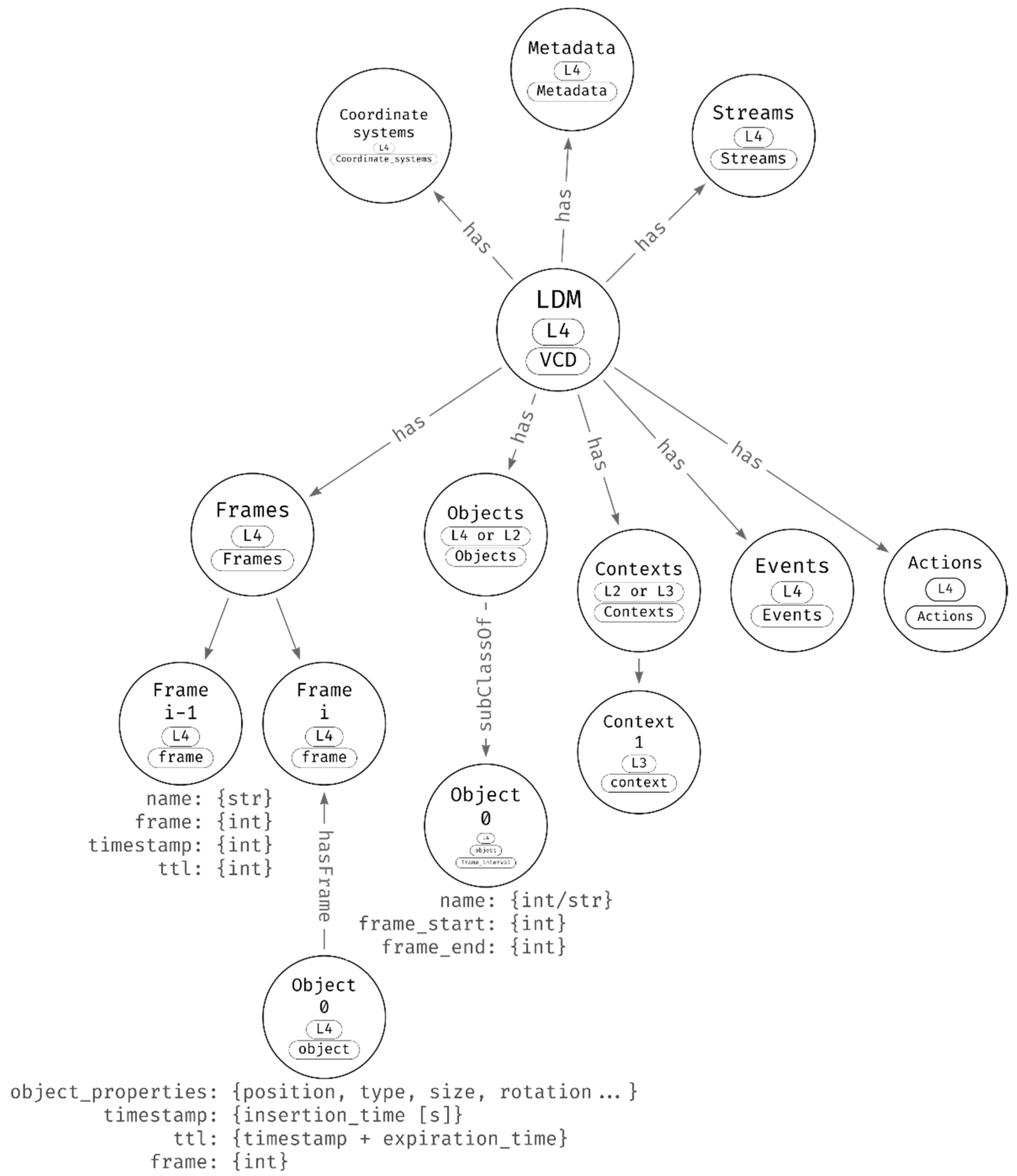
3.2. Dynamic Layer (L4) Data Model
4. iLDM Implementation
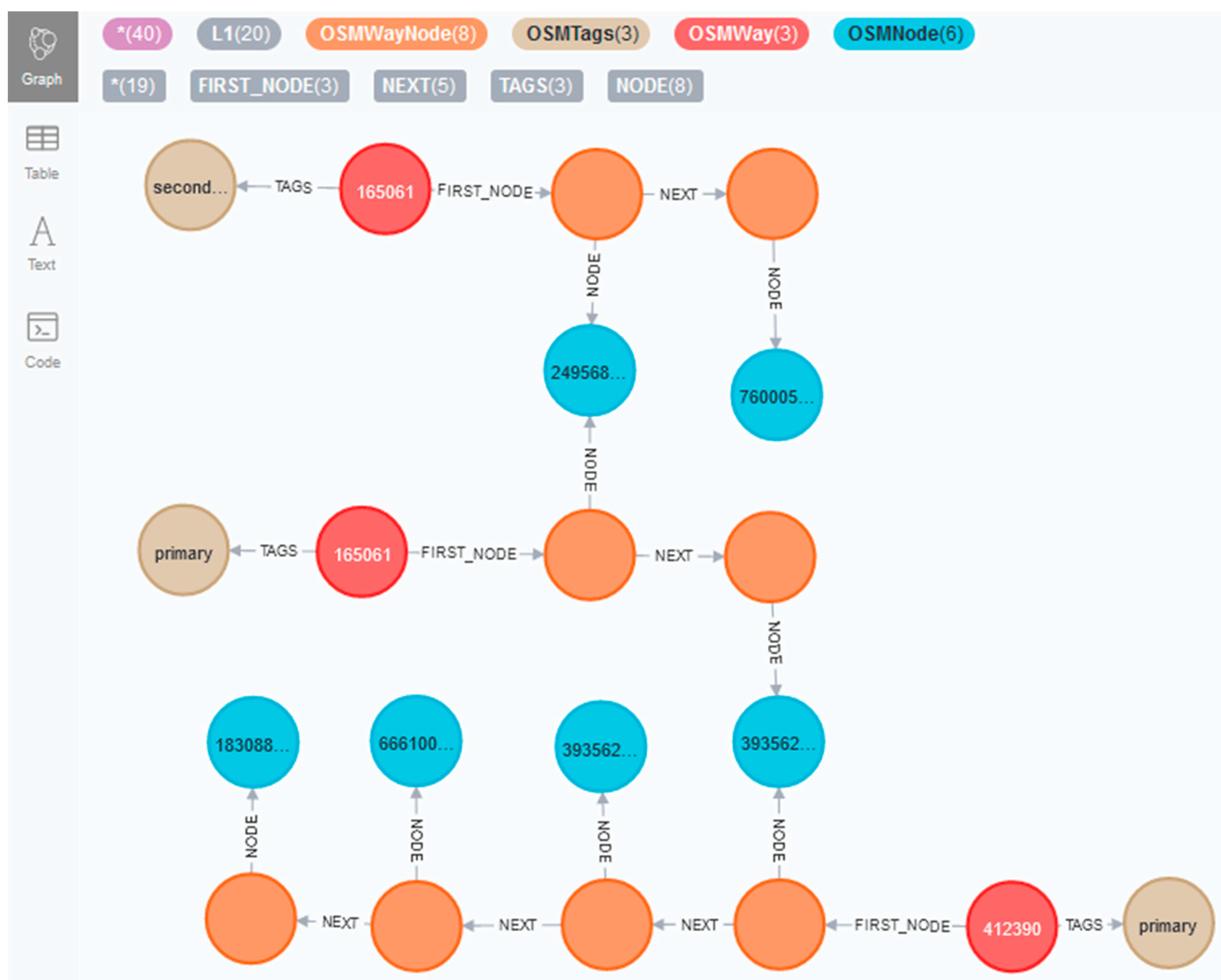
4.1. Static Data Layer (L1)
- Nodes: define a point in space, and they can be used to define standalone point features;
- Ways: define linear features and area boundaries using nodes;
- Relations: used to explain how different elements are related to each other.
- “OSMWay”: These nodes are the first node of each way represented in the database. Thus, they contain the attributes of the way, such as “way_osm_id”, “name”, “oneway” and “lanes”, or road type under different property names such as “highway”, “footway”, “residential” or “cycleway”. Moreover, they can also be associated with a building represented by a single point or a multipolygon.
- “OSMWayNode”: Each way is divided into different nodes, the number of nodes in a way will depend on the length of it. These nodes do not provide any information, they are just for representing the way and relating the OSMNodes with it.
- “OSMNode”: Each node of the way (OSMWayNode) has an associated OSMNode. These nodes provide information about the coordinates of the concrete point of the way. The properties related to these nodes are “node_osm_id”, “latitude” and “longitude”.
- “OSMTags”: these nodes provide any extra information that the OSM file may have about the way (road or building) or concrete node (in this case, they never have coordinate information).
- Include the “L1” label to all the nodes related with the road network. This will define that the nodes under this label are used to represent the static layer of the LDM;
- Add a “position” attribute to the nodes where the latitude and longitude information exists. Hence, for each coordinate value pair, the location property is set as a point in the WGS-84 coordinate reference system (CRS) using the default spatial function included in Neo4j;
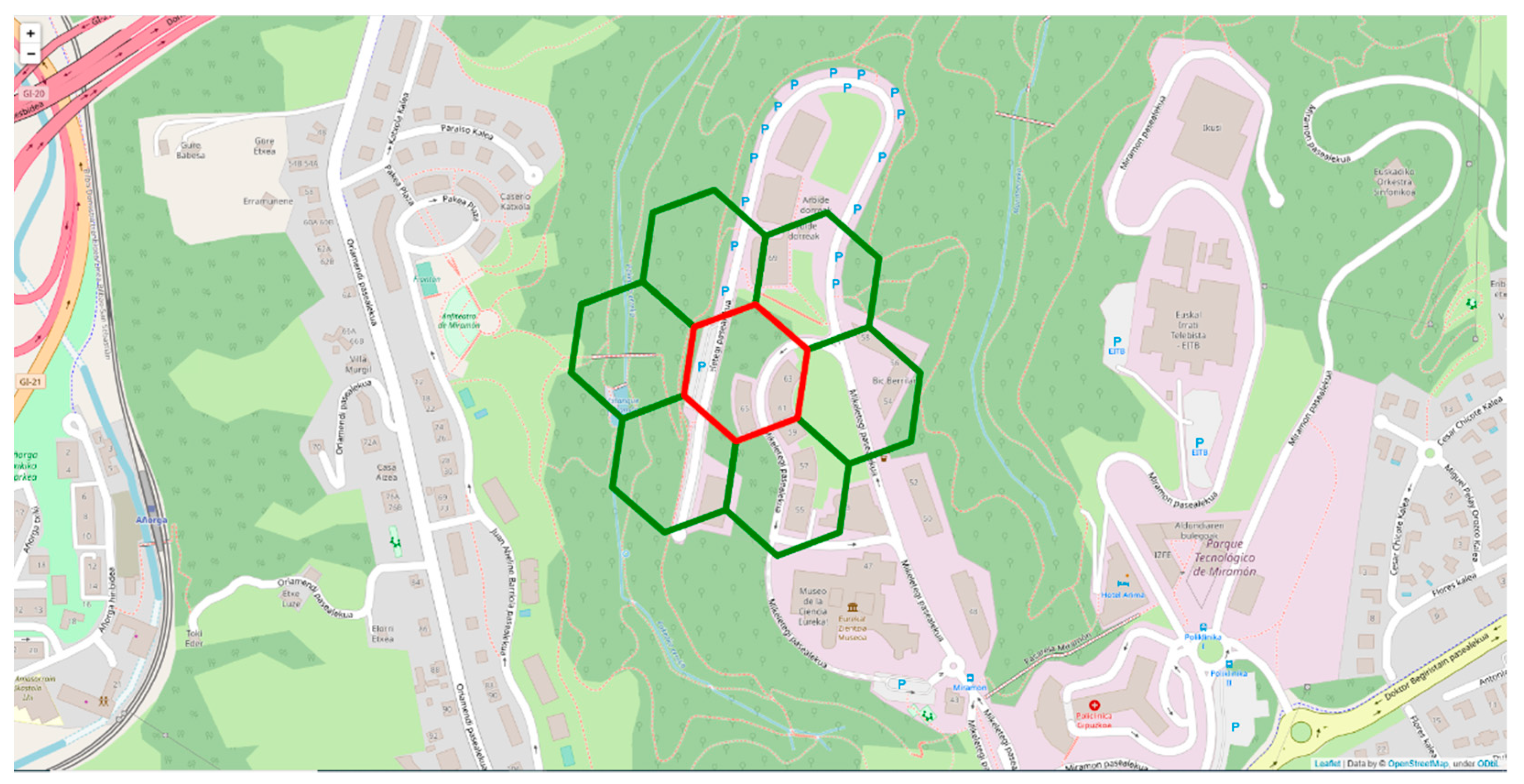
- Add a custom H3 [23] tag to the nodes with coordinates information under the “h3_address” property name. H3 is Uber’s hexagonal hierarchical geospatial indexing system, allowing to index coordinates down to a square meter resolution, the hexagon size to resolution values can greatly vary from hexagon edge lengths of 1.107 km to 50 cm and areas of 4,250,546 km2 to 0.9 m2, respectively.
4.2. Dynamic Data Layer (L4)
- “Frame”: following the OpenLABEL terminology, each “object” node will include the corresponding “frame” number as a property;
- “Timestamp”: collects the time instant when the element was created in the Neo4j database;
- “TTL”: all the dynamic data of the database has set a time to live that considers the “timestamp” and a configured “expiration time”.
4.3. H3 Indexing
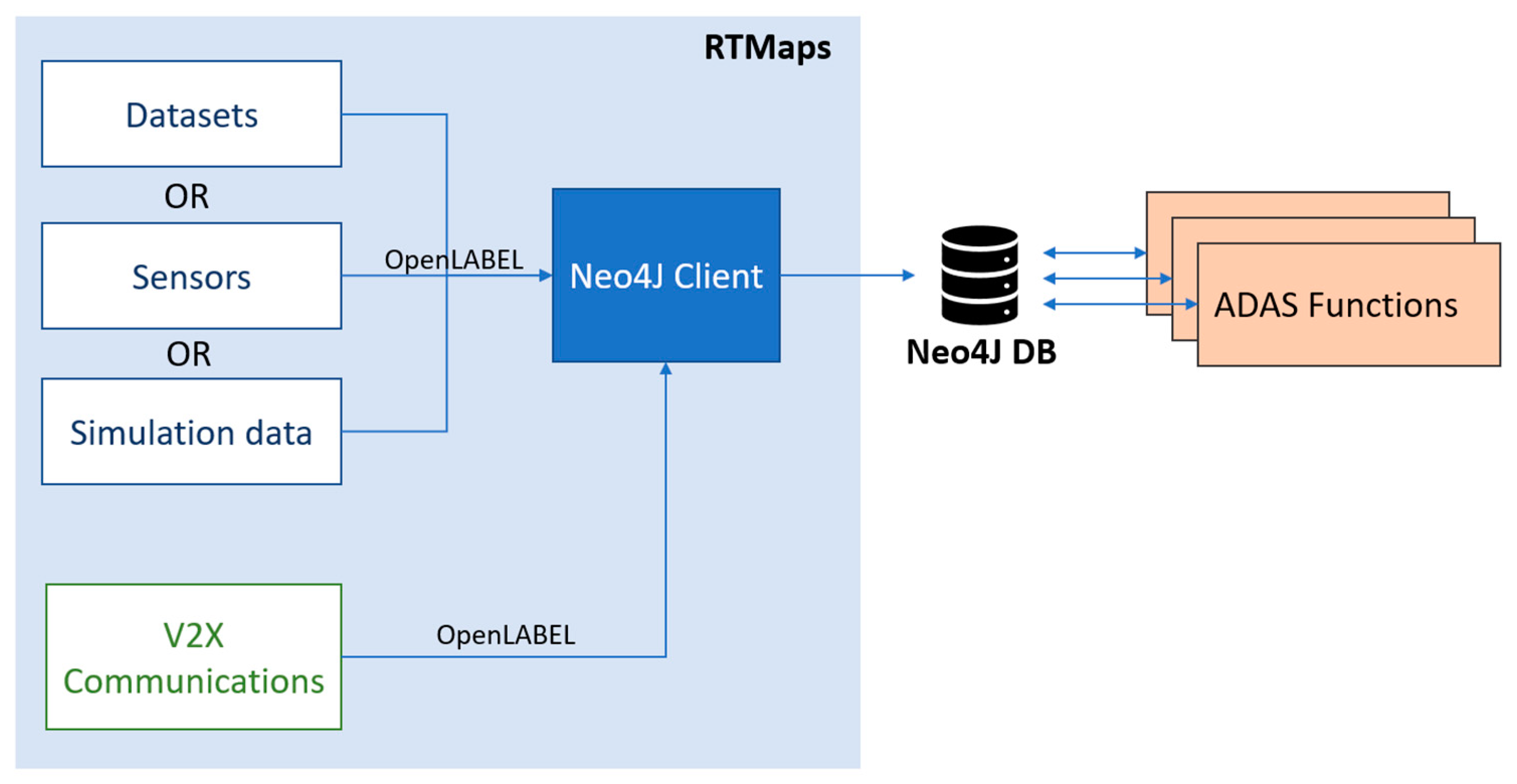
4.4. Interoperability
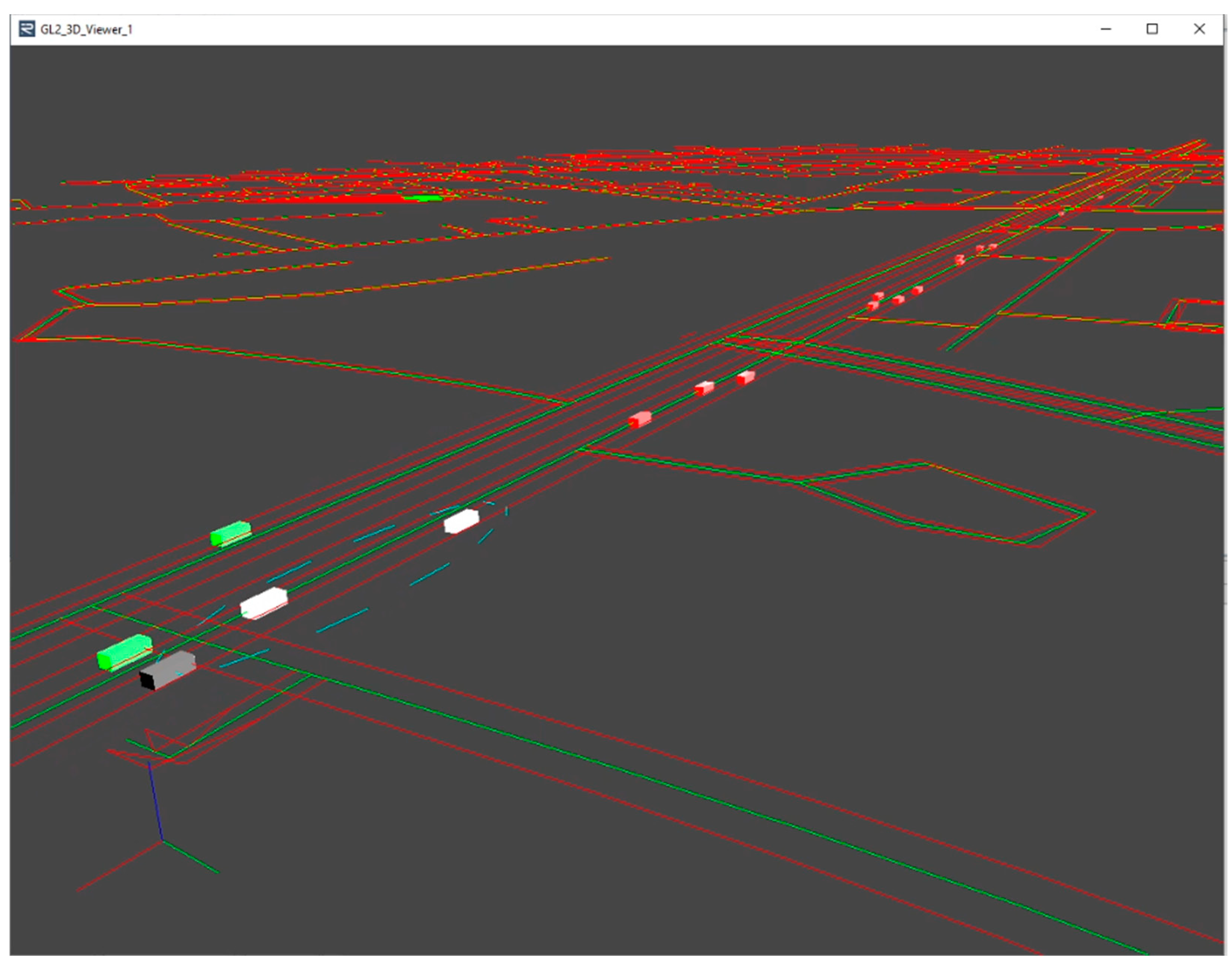
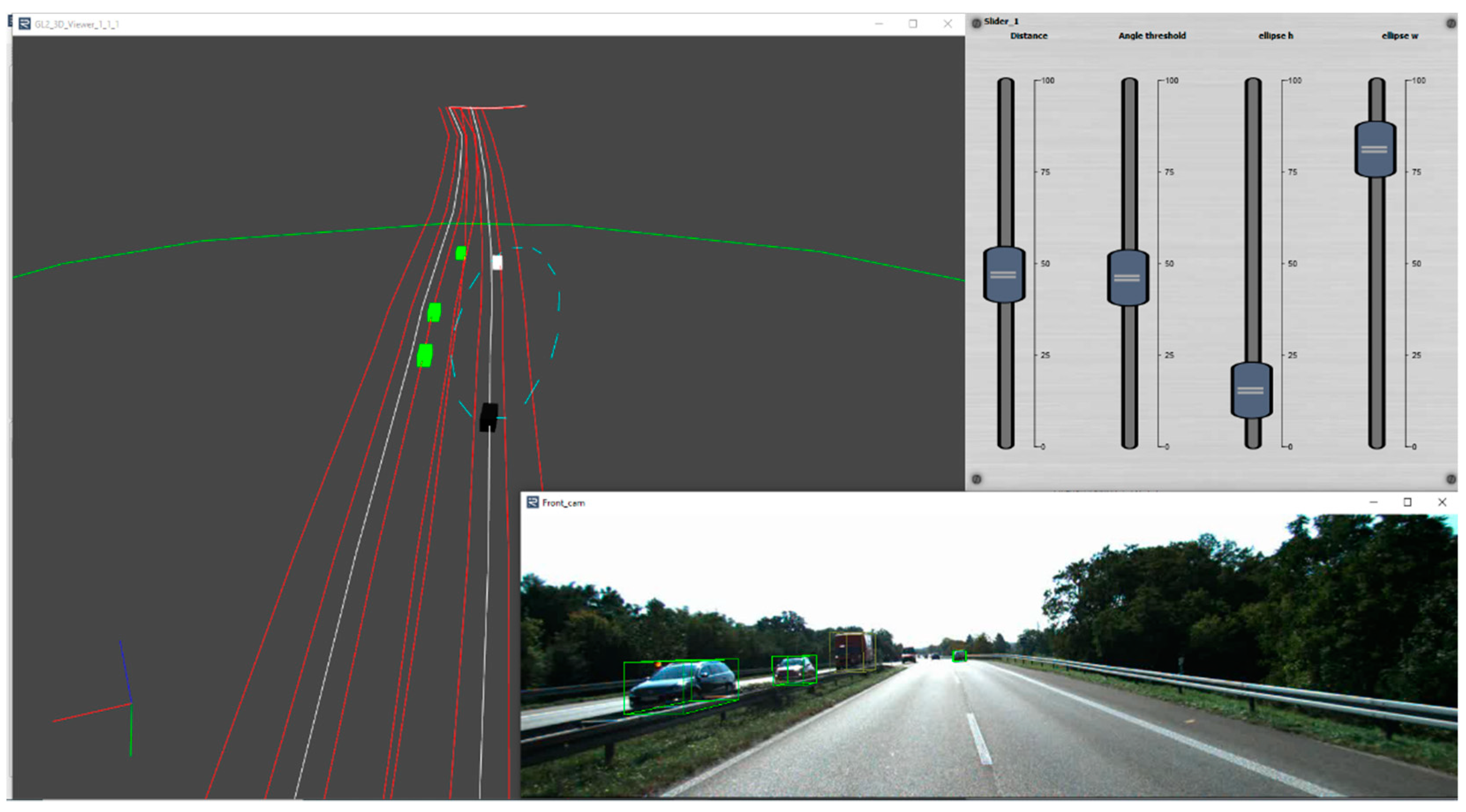
Tested Data Sources
- Velodyne HDL-32 LiDAR: small, lightweight and ruggedly built, it features up to 32 lasers across a 40° field of view;
- 4× Outside cameras: automotive 180° fisheye cameras for covering 360° of the vehicle;
- XNAV 550 DGPS: precise localisation system that can be enhanced using broadcasted DGPS corrections;
- Embedded in-vehicle HW platform: car computing platform that enables processing of sensor data and applications.
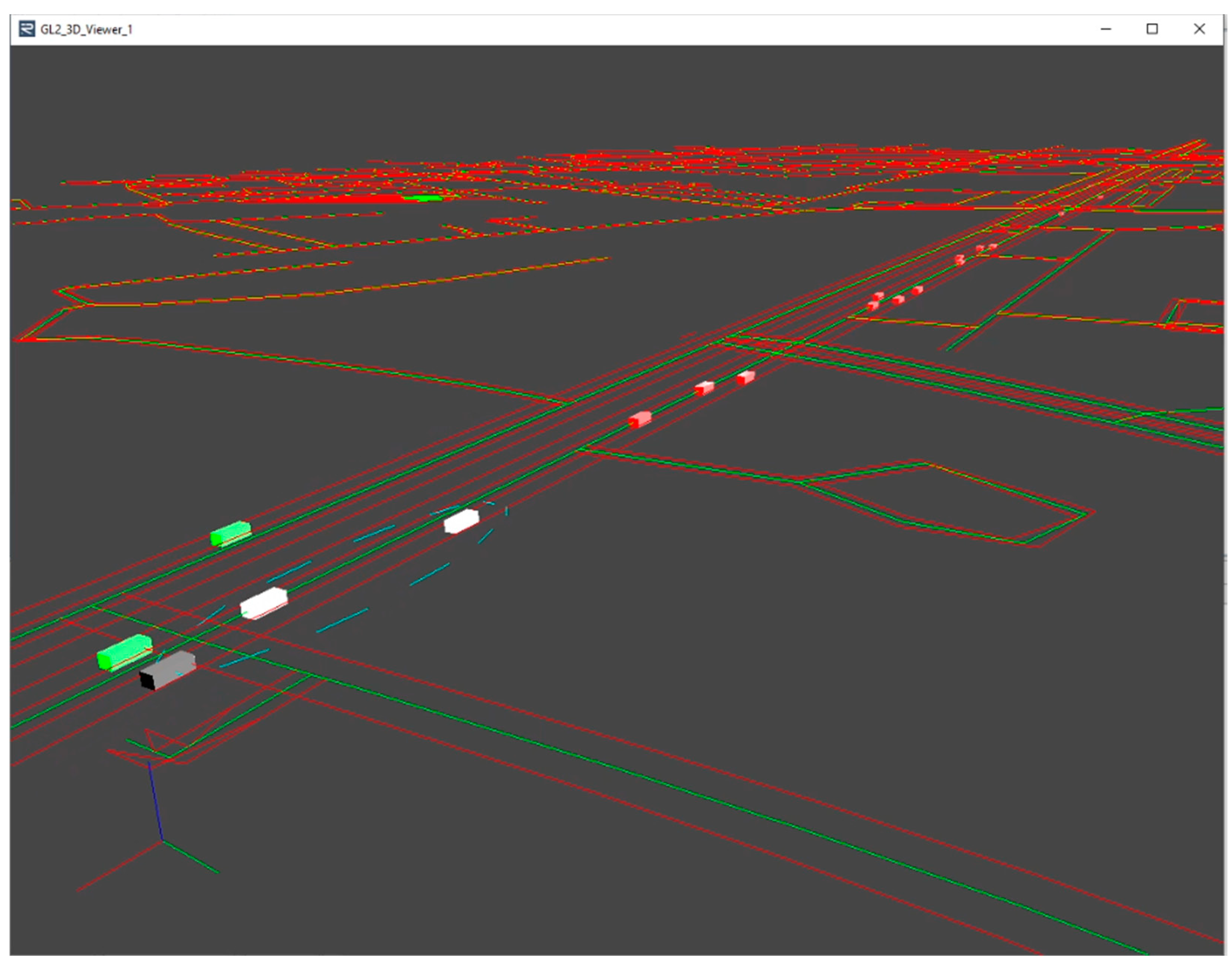
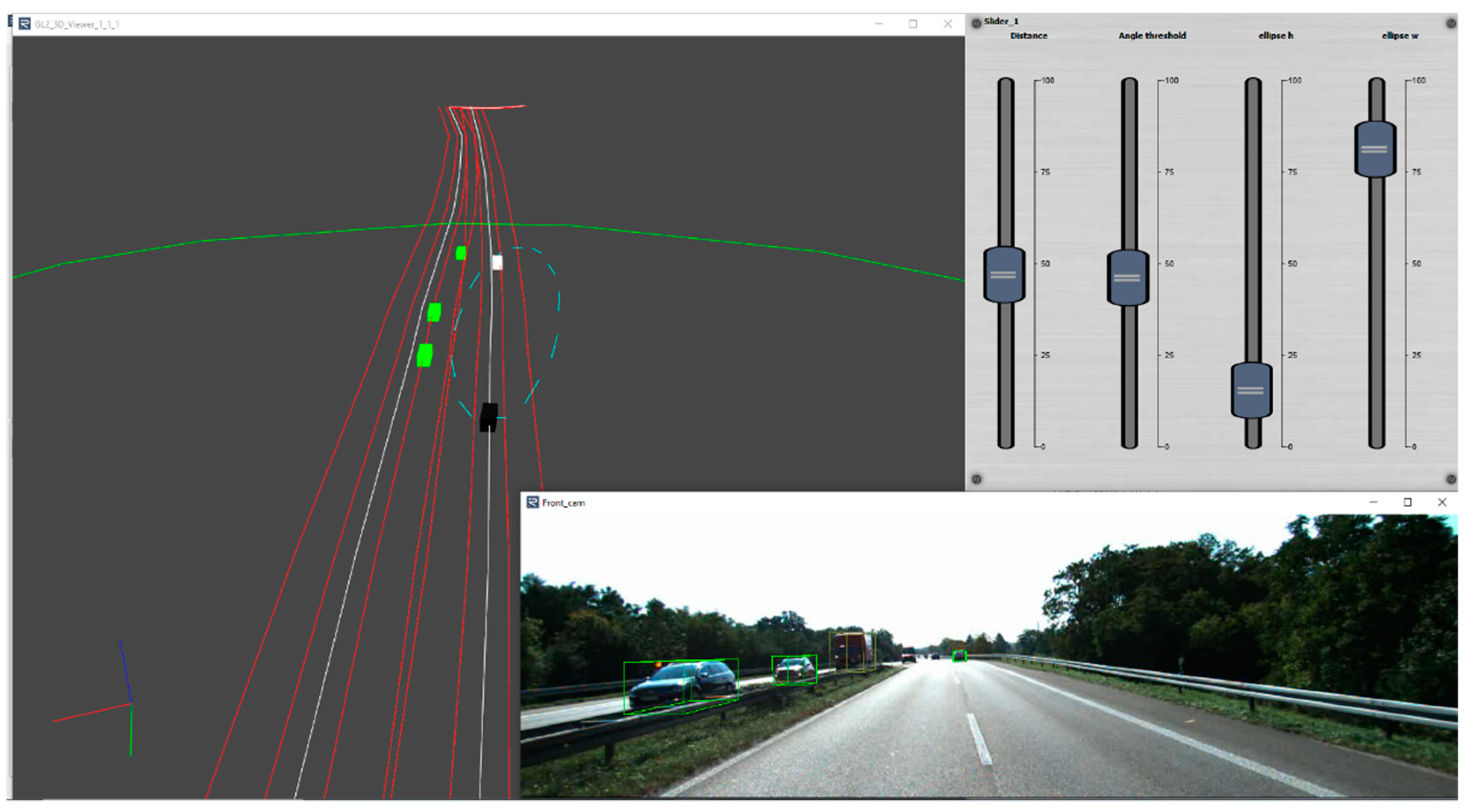
4.5. Real-Time Implementation
5. Analysis/Experiments
5.1. iLDM Performance Analysis
5.1.1. Adding Objects
5.1.2. Querying Time
- Query 1: query all L4 objects in a certain frame;
- Query 2: query all L4 objects in a certain frame in a 50 m radius of the ego-vehicle;
- Query 3: query a given vehicle in the last 10 frames;
- Query 4: query all L1 OSM nodes in the same h3 address as the ego-vehicle;
- Query 5: query all L4 objects in the same h3 address as the ego-vehicle.
5.2. Comparison with Existing Developments
5.3. Use case implementation: Vehicle Discovery Service
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| LDM | Local Dynamic Map |
| iLDM | Interoperable Local Dynamic Map |
| VDS | Vehicle Discovery Service |
| ADAS | Advanced Driver-Assistance Systems |
| C-ITS | Cooperative Intelligent Transport Systems |
| RSU | Roadside Unit |
| AD | Automated Driving |
| V2X | Vehicle-to-Everything |
| RDBMS | Relational Database Management System |
| AGO | Automotive Global Ontology |
| ETSI | European Telecommunications Standards Institute |
| CAM | Cooperative Awareness Message |
| CPM | Cooperative Perception Message |
| R-LDM | Relational-LDM |
| CRUD | Create/Read/Update/Delete |
| TTL | Time to Live |
| API | Application Programming Interface |
| OSM | OpenStreetMap |
| CRS | Coordinate Reference System |
| CarLOTA | Car Learn on Road Think Autonomous |
| N/C | Not Covered |
References
- Safespot. Safespot Integrated Project-IST-4-026963-IP Annex SP7—SCORE—SAFESPOT Core Architecture LDM API and Usage Reference. Published online 2006. pp. 1–56. Available online: http://www.safespot-eu.org/documents/SF_D7.3.1_Annex2_LDM_API_and_Usage_Reference_v0.7.pdf (accessed on 8 June 2021).
- Shimada, H.; Yamaguchi, A.; Takada, H.; Sato, K. Implementation and Evaluation of Local Dynamic Map in Safety Driving Systems. J. Transp. Technol. 2015, 5, 102. [Google Scholar] [CrossRef] [Green Version]
- Eiter, T.; Füreder, H.; Kasslatter, F.; Parreira, J.X.; Schneider, P. Towards a Semantically Enriched Local Dynamic Map. Int. J. Intell. Transp. Syst. Res. 2019, 17, 32–48. [Google Scholar] [CrossRef] [Green Version]
- ASAM. ASAM OpenLABEL V1.0.0. Available online: https://www.asam.net/project-detail/asam-OpenLABEL-v100/ (accessed on 6 July 2021).
- Urbieta, I.; Nieto, M.; García, M.; Otaegui, O. Design and Implementation of an Ontology for Semantic Labeling and Testing: Automotive Global Ontology (AGO). Appl. Sci. 2021, 11, 7782. [Google Scholar] [CrossRef]
- Andreone, L.; Brignolo, R.; Damiani, S.; Sommariva, F.; Vivo, G.; Marco, S. D8.1.1—SAFESPOT Final Report. SAFESPOT Final Rep—Public Version. Available online: http://www.transport-research.info/sites/default/files/project/documents/20130329_130257_17414_D8.1.1_Final_Report__Public_v1.0.pdf (accessed on 6 July 2021).
- ETSI TR 102 863 V1.1.1. Intelligent Transport Systems (ITS). Vehicular Communications. Basic Set of Applications. Local Dynamic Map (LDM); Rationale for and guidance on standardization LDM Rationale and Guidance - ETSI T R 102 863. 2011. Available online: https://www.etsi.org/deliver/etsi_tr/102800_102899/102863/01.01.01_60/tr_102863v010101p.pdf (accessed on 9 August 2021).
- ETSI EN 302 895 V1.1.1. Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Local Dynamic Map (LDM) Basic Set of Applications-ETSI EN 302 895. 2014. Available online: https://www.etsi.org/deliver/etsi_en/302800_302899/302895/01.01.01_60/en_302895v010101p.pdf (accessed on 16 June 2021).
- ISO/TC 204 Systems I Transport. ISO/TS 17931:2013 Intelligent Transport Systems—Extension of Map Database Specifications for Local Dynamic Map for Applications of Cooperative ITS. 2013. Available online: https://www.iso.org/standard/62110.html (accessed on 16 July 2021).
- PEGASUS. Scenario Description and Knowledge-Based Scenario Generation. Online. Published online 2018. Available online: https://www.pegasusprojekt.de/files/tmpl/Pegasus-Abschlussveranstaltung/05_Scenario_Description_and_Knowledge-Based_Scenario_Generation.pdf (accessed on 25 July 2021).
- PEGASUS Project Office. Pegasus Research Project. Pegasus. Published online 2019. Available online: https://www.pegasusprojekt.de/en/ (accessed on 8 August 2021).
- Scholtes, M.; Westhofen, L.; Turner, L.R.; Lotto, K.; Schuldes, M.; Weber, H.; Wagener, N.; Neurohr, C.; Bollmann, M.H.; Körtke, F.; et al. 6-Layer Model for a Structured Description and Categorization of Urban Traffic and Environment. IEEE Access 2021, 9, 59131–59147. [Google Scholar] [CrossRef]
- ETSI EN 302637-2:2019. Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Part 2: Specification of Cooperative Awareness Basic Service. 2019. Available online: https://www.etsi.org/deliver/etsi_en/302600_302699/30263702/01.04.01_60/en_30263702v010401p.pdf (accessed on 7 July 2021).
- ETSI T R 103 562:2019. Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Analysis of the Collective Perception Service (CPS). 2019. (accessed on 17 June 2021).
- PipelineDB. Available online: https://github.com/pipelinedb/pipelinedb (accessed on 6 July 2021).
- Eggert, J.; Salazar, D.A.; Puphal, T.; Flade, B. Driving Situation Analysis with Relational Local Dynamic Maps (R-LDM). International Sympposium on Future Active Safety Technology towards Zero-Traffic-Accidents (FAST-zero). 2017. Available online: https://www.researchgate.net/publication/334730164_Driving_Situation_Analysis_with_Relational_Local_Dynamic_Maps (accessed on 6 July 2021).
- Netten, B.; Kester, L.J.H.M.; Wedemeijer, H.; Passchier, I.; Driessen, B. DynaMap: A Dynamic Map for road side ITS stations. In Proceedings of the 20th ITS World Congress Tokyo 2013, Tokyo, Japan, 14–18 October 2013; Intelligent Transportation Society of America: Washington, DC, USA, 2013. [Google Scholar]
- Maiouak, M.; Taleb, T. Dynamic Maps for Automated Driving and UAV Geofencing. IEEE Wirel Commun. 2019, 26, 54–59. [Google Scholar] [CrossRef]
- Neo4j. Neo4j Graph Data Platform. Available online: https://neo4j.com/ (accessed on 6 July 2021).
- ASAM. ASAM OpenDRIVE. Available online: https://www.asam.net/standards/detail/opendrive/ (accessed on 6 July 2021).
- Poggenhans, F.; Pauls, J.H.; Janosovits, J.; Orf, S.; Naumann, M.; Kuhnt, F.; Mayr, M. Lanelet2: A high-definition map framework for the future of automated driving. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018. [Google Scholar] [CrossRef]
- Uber Technologies. Hexagonal hierarchical geospatial indexing system (H3). Available online: https://h3geo.org/ (accessed on 6 July 2021).
- Geiger, A.; Lenz, P.; Stiller, C.; Urtasun, R. Vision meets Robotics: The KITTI Dataset. Int. J. Robot. Res. 2013. published online. [Google Scholar] [CrossRef] [Green Version]
- Lopez, P.A.; Behrisch, M.; Bieker-Walz, L.; Erdmann, J.; Flötteröd, Y.P.; Hilbrich, R.; Lücken, L.; Rummel, J.; Wagner, P.; Wießner, E. Microscopic Traffic Simulation using SUMO. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; Available online: https://elib.dlr.de/124092/ (accessed on 26 August 2021).
- Edgewall Software. JOSM. Available online: https://josm.openstreetmap.de/ (accessed on 6 July 2021).
- Intempora. RTMaps. Available online: https://intempora.com/products/rtmaps/ (accessed on 6 July 2021).
- Velez, G.; Perez, J.; Martin, A. 5G MEC-enabled vehicle discovery service for streaming-based CAM applications. Multimed. Tools Appl. 2021. published online. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CPU | Intel Core I7-10750H @2.6 GHz 12 Cores |
| DISK | 512 GB SSD |
| RAM | 16 GB DDR4 |
| OS | Windows 10 |
| Work | Standardised Data Format | Database | Semantic Support | Real Time | Compatible with OSM |
|---|---|---|---|---|---|
| Implementation and Evaluation of Local Dynamic Map in Safety Driving Systems | No | PostgreSQL | No | Yes * | Yes |
| Towards a Semantically Enriched Local Dynamic Map | No | PostgreSQL/PipelineDB | Yes | No ** | Yes |
| R-LDM | No | Neo4j | Yes | N/C | Yes |
| iLDM | OpenLABEL | Neo4j | Yes | Yes | Yes |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
García, M.; Urbieta, I.; Nieto, M.; González de Mendibil, J.; Otaegui, O. iLDM: An Interoperable Graph-Based Local Dynamic Map. Vehicles 2022, 4, 42-59. https://doi.org/10.3390/vehicles4010003
García M, Urbieta I, Nieto M, González de Mendibil J, Otaegui O. iLDM: An Interoperable Graph-Based Local Dynamic Map. Vehicles. 2022; 4(1):42-59. https://doi.org/10.3390/vehicles4010003
Chicago/Turabian StyleGarcía, Mikel, Itziar Urbieta, Marcos Nieto, Javier González de Mendibil, and Oihana Otaegui. 2022. "iLDM: An Interoperable Graph-Based Local Dynamic Map" Vehicles 4, no. 1: 42-59. https://doi.org/10.3390/vehicles4010003
APA StyleGarcía, M., Urbieta, I., Nieto, M., González de Mendibil, J., & Otaegui, O. (2022). iLDM: An Interoperable Graph-Based Local Dynamic Map. Vehicles, 4(1), 42-59. https://doi.org/10.3390/vehicles4010003