
User Experience of Navigating Work Zones with Automated Vehicles: Insights from YouTube on Challenges and Strengths


Abstract
Highlights
- Automated vehicles (AVs) show a near-equal mix of strengths and challenges in navigating real-world construction zones, with 117 strengths and 105 challenges documented from 38 user-recorded cases.
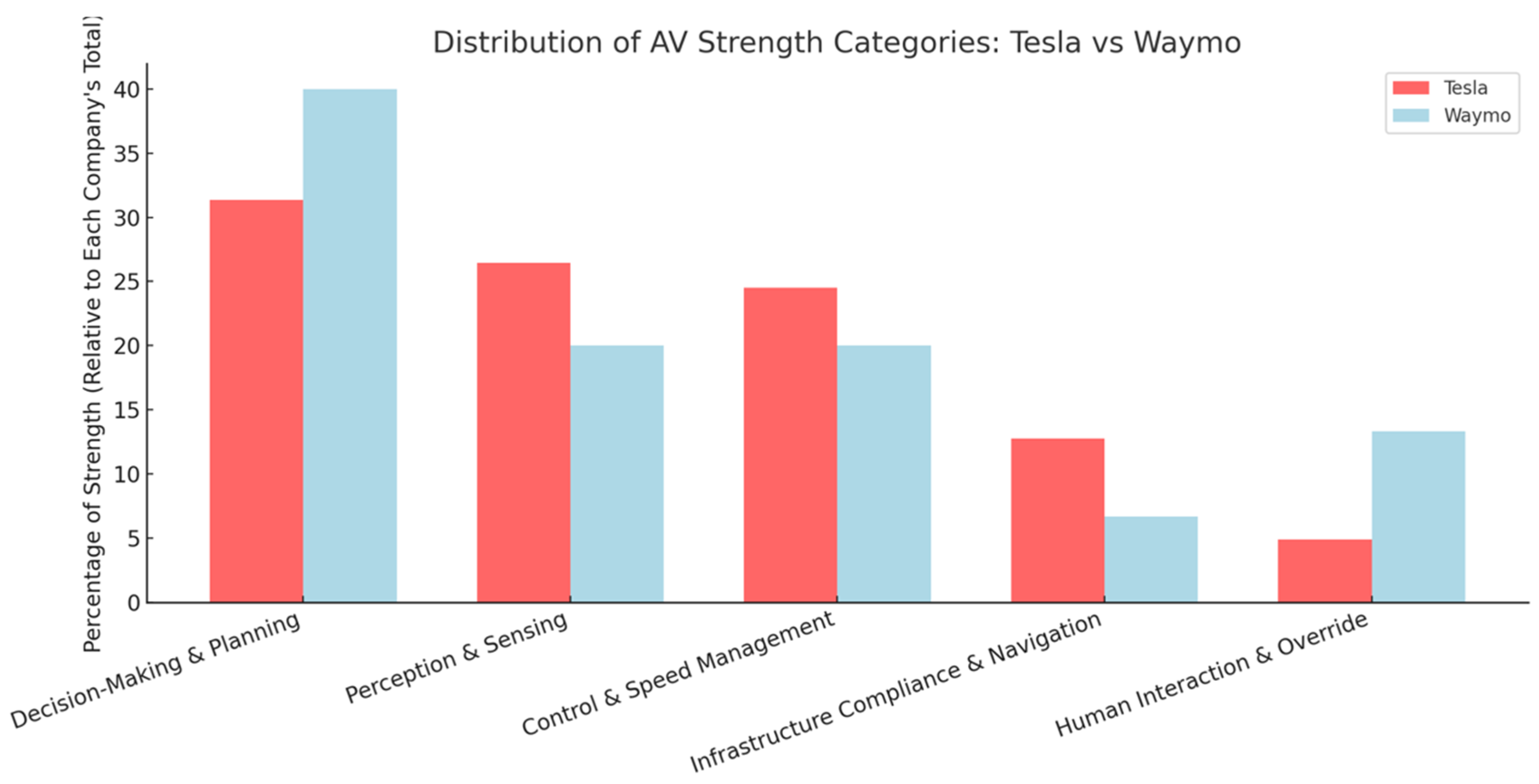
- Tesla’s FSD system demonstrates adaptability and dynamic response in complex work zones, while Waymo shows better handling of human interactions and structured environments.
- Continued AV development requires improvements in perception of temporary infrastructure, interaction with human actors, and navigation in unmapped or irregular layouts.
- User-generated video content offers valuable insights into real-world AV behavior, informing infrastructure design, policy development, and public trust in AV deployment.
Abstract
1. Introduction
- (1)
- What types of challenges do AV users report encountering when navigating construction zones, and what strengths do they demonstrate in such complex environments?
- (2)
- To what extent do current AV technologies meet user expectations regarding safety, reliability, and automated performance in work zones, and do the strengths outweigh the challenges?
- (3)
- How do users respond to AV behavior in construction zones, and what do their reactions reveal about trust, acceptance, and willingness to adopt the technology in these contexts?
- (4)
- What insights can be extracted from user-shared videos to guide future improvements in AV technology, transportation systems, urban infrastructure, and policy development related to AV deployment in work zones?
2. Materials and Methods
3. Results
3.1. Waymo’s Navigation Experience
3.2. Tesla’s Navigation Experience
4. Discussion
4.1. AV Performance Analysis
4.1.1. Challenges
4.1.2. Strengths
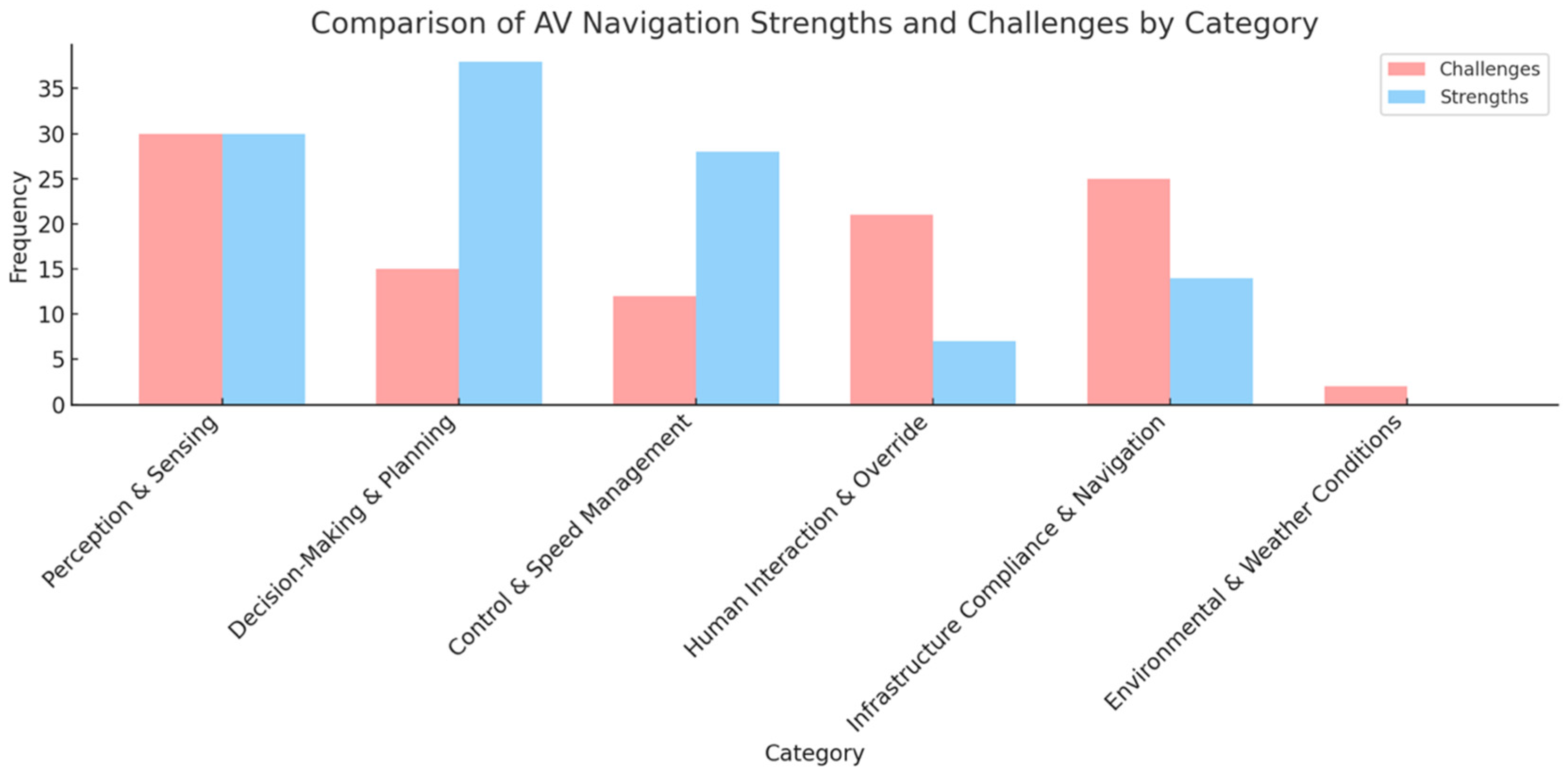
4.1.3. Comparison Between Strengths and Challenges
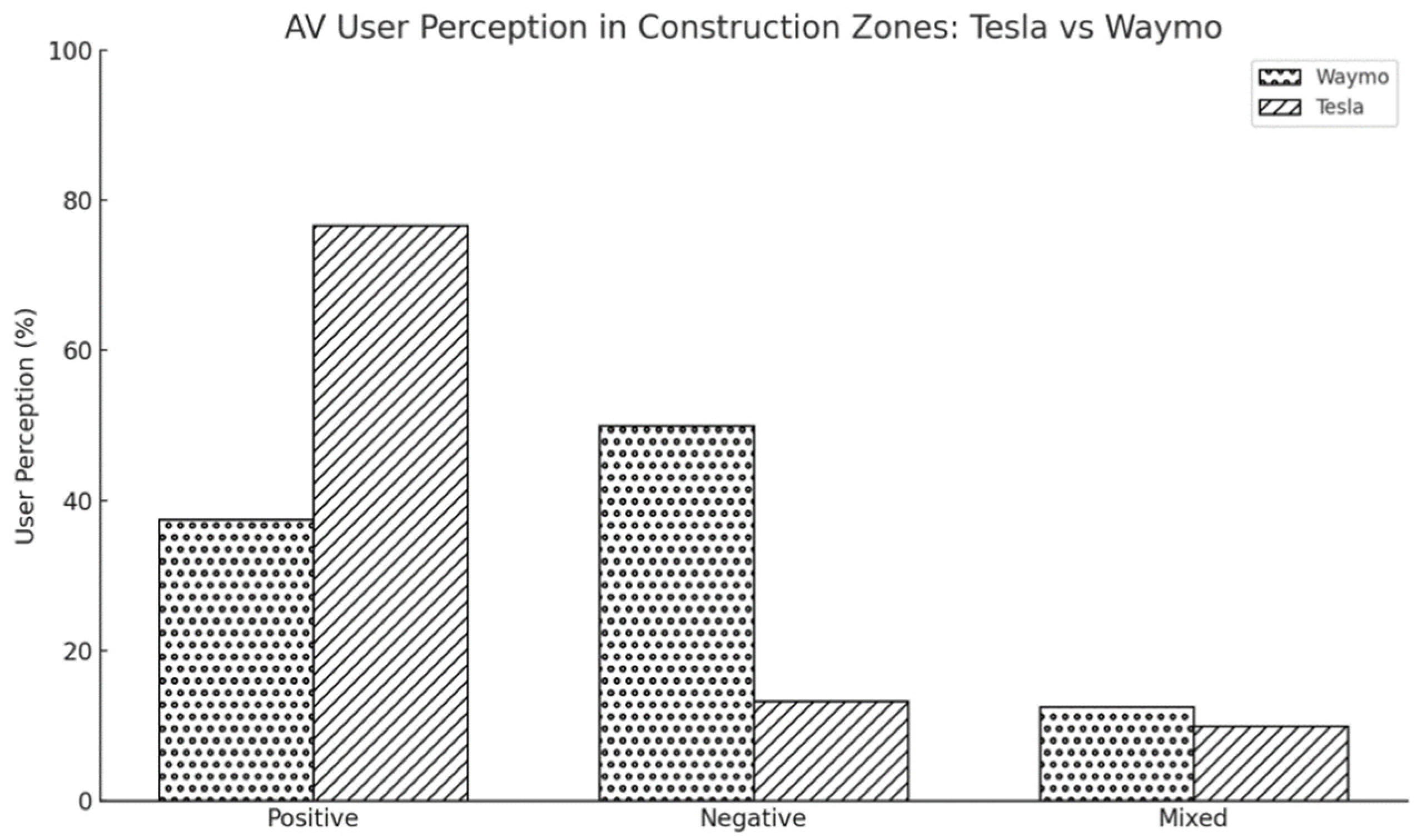
4.2. User Perception Analysis
4.3. Safety Implications and Regulatory Considerations of AV Failures in Work Zones
5. Research Findings
6. Future Directions
7. Limitations
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- National Highway Traffic Safety Administration. Work/Construction Zones. Available online: https://www.nhtsa.gov/sites/nhtsa.gov/files/workzones.pdf (accessed on 5 March 2025).
- Work Zone Barriers. Work Zone Fatalities, Injuries, & Crashes. Available online: https://www.workzonebarriers.com/work-zone-crash-facts.html (accessed on 22 April 2025).
- National Safety Council. Motor Vehicle Safety Issues, Work Zone. Available online: https://injuryfacts.nsc.org/motor-vehicle/motor-vehicle-safety-issues/work-zones/ (accessed on 22 April 2025).
- Ansarinejad, M.; Huang, Y.; Qiu, A. Impact of Fog on Vehicular Emissions and Fuel Consumption in a Mixed Traffic Flow with Autonomous Vehicles (AVs) and Human-Driven Vehicles Using VISSIM Microsimulation Model. In Proceedings of the International Conference on Transportation and Development 2023: Transportation Safety and Emerging Technologies, Austin, TX, USA, 14–17 June 2023. [Google Scholar] [CrossRef]
- Maddineni, V.K.; Ansarinejad, M.; Ahmed, M.M. Safety and operational impacts of different Autonomous Vehicle operations on freeway work zones. Adv. Trans. Stud. 2024, 4, 117–126. [Google Scholar]
- SAE International. SAE Levels of Driving Automation. Available online: https://www.sae.org/blog/sae-j3016-update (accessed on 28 September 2024).
- Ansarinejad, M.; Ansarinejad, K.; Lu, P.; Huang, Y.; Tolliver, D. Autonomous Vehicles in Rural Areas: A Review of Challenges, Opportunities, and Solutions. Appl. Sci. 2025, 15, 4195. [Google Scholar] [CrossRef]
- Makahleh, H.Y.; Ferranti, E.J.S.; Dissanayake, D. Assessing the Role of Autonomous Vehicles in Urban Areas: A Systematic Review of Literature. Future Trans. 2024, 4, 321–348. [Google Scholar] [CrossRef]
- Das, S.; Dutta, A.; Lindheimer, T.; Jalayer, M.; Elgart, Z. YouTube as a Source of Information in Understanding Autonomous Vehicle Consumers: Natural Language Processing Study. J. Trans. Res. Board 2019, 2673, 242–253. [Google Scholar] [CrossRef]
- State of California Department of Motor Vehicles. Disengagement Reports. Available online: https://www.dmv.ca.gov/portal/vehicle-industry-services/autonomous-vehicles/disengagement-reports/ (accessed on 22 April 2025).
- State of California Department of Motor Vehicles. Autonomous Vehicle Collision Reports. Available online: https://www.dmv.ca.gov/portal/vehicle-industry-services/autonomous-vehicles/autonomous-vehicle-collision-reports/ (accessed on 22 April 2025).
- National Highway Traffic Safety Administration(NHTSA). Incident Report Data. Available online: https://www.nhtsa.gov/data (accessed on 22 April 2025).
- Waymo. Waymo Open Dataset. Available online: https://waymo.com/open/ (accessed on 22 April 2025).
- Zhang, W.; Wang, K. Parking futures: Shared automated vehicles and parking demand reduction trajectories in Atlanta. Land Use Policy 2020, 91, 103963. [Google Scholar] [CrossRef]
- Ansarinejad, M.; Ahmed, M.; Gaweesh, S. Assessing the Efficacy of Pre-Trained LLMs in Analyzing Autonomous Vehicles Field Test Disengagements. In Assessing the Efficacy of Pre-Trained LLMs in Analyzing Autonomous Vehicles Field Test Disengagements; Transportation Research Board (TRB): Washington, DC, USA, 2025; Available online: https://annualmeeting.mytrb.org/OnlineProgramArchive/Details/23204 (accessed on 11 May 2025).
- Waymo. Waymo Driver. Available online: https://waymo.com/waymo-driver/ (accessed on 22 April 2025).
- 12 News. Waymo Driverless Car Unable to Navigate Traffic Cones in Chandler. Available online: https://www.youtube.com/watch?v=B4O9QfUE5uI (accessed on 25 April 2025).
- Chen, K. Waymo Robotaxi vs. Downtown Construction | Waymo Ride Along #1. Available online: https://www.youtube.com/watch?v=Dk4qc_4IgZQ (accessed on 22 April 2025).
- GNAV TV. WAYMO Autonomous Driving—Driverless Car Speeding Through a Construction Zone—Tempe Arizona. Available online: https://www.youtube.com/watch?v=njfSKMcM5-w (accessed on 22 April 2025).
- Chen, K. Driverless Car Confused by Construction Zone | Waymo Ride Along #14. Available online: https://www.youtube.com/watch?v=wWZGZWuUx-Y (accessed on 22 April 2025).
- Baruchbrett. Waymo vs. Construction Equipment. Available online: https://www.youtube.com/watch?v=vcw48xJXZKg (accessed on 22 April 2025).
- meme me. Fully Autonomous Car Glitches in a Construction Zone and Gets Stuck. Available online: https://www.youtube.com/watch?v=i96nws0MtDg (accessed on 22 April 2025).
- Maya. 15 Clips of Waymo Vehicles Navigating Roadwork/Construction/Cones. Available online: https://www.youtube.com/watch?v=K08nfCxNKUM (accessed on 22 April 2025).
- Marcel Irnie (Irnieracing). Google’s Self Driving Electric Car Waymo Taxi Got Lost in California Construction Zone. Available online: https://www.youtube.com/watch?v=0mFZEuwIceQ (accessed on 22 April 2025).
- TESLA. Impact Report 2024. Available online: https://www.tesla.com/impact (accessed on 22 April 2025).
- Land, M. Tesla Model 3 Autopilot Perfection Through a Construction Zone. Available online: https://www.youtube.com/watch?v=clR994Jg4O0 (accessed on 22 April 2025).
- Teslavangelist. First Try of Tesla Drive on Navigation: Construction Zone, Solid White Lines, etc. Available online: https://www.youtube.com/watch?v=bqbOEKZa2vg (accessed on 22 April 2025).
- Tesla, D. Tesla Autopilot Avoids Construction Barrel in My Lane | Navigate on Autopilot | Full Self Driving |. Available online: https://www.youtube.com/watch?v=SS10B51qAz0 (accessed on 22 April 2025).
- CfTesla. Tesla Autopilot Creates It’s Own Path Through Construction Zone! AMAZING!!! | Tesla Model 3. Available online: https://www.youtube.com/watch?v=3wzkKM6RmVc (accessed on 22 April 2025).
- RodrickEV. Can Autopilot Navigate A Construction Zone In The Rain? (HW3 2020.8.1). Available online: https://www.youtube.com/watch?v=w2VWXwMyLIw (accessed on 22 April 2025).
- JermEV. Tesla Model 3 Autopilot Through Construction Zone Jan 2020! Available online: https://www.youtube.com/watch?v=4Ifa7-Caat0 (accessed on 22 April 2025).
- Tesla Driver. Lorry SWERVES into My Lane SELF DRIVING Through Construction Zone!—Tesla Autopilot 2020.16.2.1. Available online: https://www.youtube.com/watch?v=WLI_ydsrrZM (accessed on 22 April 2025).
- RodrickEV. Tesla Autopilot Can Drive in Construction Zone Lanes? (HW3 2020.4.1). Available online: https://www.youtube.com/watch?v=5NdpgXef4sw (accessed on 22 April 2025).
- Tesla Life Europe. Impressive Tesla Autopilot Performance at Night & in Construction Zone with EU Update 2020.40.3. Available online: https://www.youtube.com/watch?v=bVkpbNV4uEA (accessed on 22 April 2025).
- Teslajake. Tesla Model 3 Autopilot Construction Zone. Available online: https://www.youtube.com/watch?v=mGV6_o1gHsY (accessed on 22 April 2025).
- Tesla Shree. Tesla FSD Beta Version 10.5 | During Road Work | Moving Stop Sign! Available online: https://www.youtube.com/watch?v=2UAGNrmlLGE (accessed on 22 April 2025).
- TeslaNerd 360. Tesla FSD Beta 10.69.2.2 Construction Zone Confusion—Full Self Driving on Model Y. Available online: https://www.youtube.com/watch?v=kXh-7gnq_OY (accessed on 22 April 2025).
- The Megawatts. Tesla Model Y Full Self Driving FSD Almost Perfect! FSD Construction Zone Not So Much! MUST WATCH! Available online: https://www.youtube.com/watch?v=JEPzLnxdQvw (accessed on 22 April 2025).
- Huey L. Tesla Full Self Driving Construction Zone (1). Available online: https://www.youtube.com/watch?v=NNZpVJEJjwY (accessed on 22 April 2025).
- Minimal Duck. Tesla FSD—Construction Zone!! (Full Self Driving Beta 10.11.2). Available online: https://www.youtube.com/watch?v=1QLEY4pT5HA (accessed on 22 April 2025).
- ByTesla237. Tesla Full Self Driving Handles a Construction Zone Like a CHAMP!! Available online: https://www.youtube.com/shorts/vGA21V30v_Y (accessed on 22 April 2025).
- Spicy Tech. Tesla FSD Beta: Real-World Traffic Test—Discovering Opportunities for Improvement During Rush Hour. Available online: https://www.youtube.com/watch?v=49Wd0beBxUg (accessed on 22 April 2025).
- Tesla Owners Silicon Valley. FSD Beta Handles Construction Zone. Available online: https://www.youtube.com/shorts/oWbkN33POEs (accessed on 22 April 2025).
- Torque News. Tesla FSD Beta Demonstrates Incredible Progress in Tight Construction Zone. Available online: https://www.youtube.com/watch?v=-Lcu4BEFQfA (accessed on 22 April 2025).
- Winston’s Garage. Tesla Autopilot VS Construction Zone! Available online: https://www.youtube.com/shorts/-mfgMf5PyjE (accessed on 22 April 2025).
- It’s Binh (Been) Reviewed & More. Tesla Model Y FSD Full Self Driving Beta Navigating Construction Zone Lots of Cones. Available online: https://www.youtube.com/watch?v=DWviwLfvVWI (accessed on 22 April 2025).
- FSD604. Learning From the Construction Zone: A Tesla Model 3 Experience with FSD 12.3.3. Available online: https://www.youtube.com/watch?v=Qpe7LA4K5ho (accessed on 22 April 2025).
- FSD604. FSD 12.3.3 in Construction Zone Navigating the Construction Zone: A Tesla Model 3 with FSD #TeslaFSD. Available online: https://www.youtube.com/watch?v=rxSNDqGJm2E (accessed on 26 April 2025).
- Tesla FSD (Full Self Driving). Tesla FSD Beta 12: The ONE with the Construction Zone. Available online: https://www.youtube.com/watch?v=MNi-vsAIqD8 (accessed on 24 April 2025).
- Iowa Tesla Guy. Tesla Full Self Driving (FSD) vs Heavy Construction Zone. Available online: https://www.youtube.com/watch?v=RR5jM3L-ad8 (accessed on 22 April 2025).
- Jakub Kudlacz. Tesla FSD in the Rain Doing Its Thing! (Construction Zone, City Streets, Highway, Parking Lot). Available online: https://www.youtube.com/watch?v=fbnhWYgJgLY (accessed on 26 April 2025).
- my tesla cybertruck. Tesla fsd. It’s Smarter than Me. It’s Taking Shortcuts to Avoid Road Construction, and Parks Itself. Available online: https://www.youtube.com/watch?v=e57jTMEI0WE (accessed on 22 April 2025).
- Frunk to Trunk. Navigate Construction Zones with Ease! Tesla’s Magic! Available online: https://www.youtube.com/shorts/gLKc51bg4Cs (accessed on 22 April 2025).
- FSD Observer. FSD 12.3.6 Lane Change to Passing Lane in Work Zone. Arthur Ashe Stadium Test #fsd #fsdbeta. Available online: https://www.youtube.com/shorts/_bwYe_8xnYM (accessed on 22 April 2025).
- FSDDriver. Tesla FSD Nightmare: Construction Zone Chaos & No Fixes in Sight! Available online: https://www.youtube.com/watch?v=I9fPBwhTf9A (accessed on 22 April 2025).
- National Highway Traffic Safety Administration; U.S. Department of Transportation. A Framework for Automated Driving System Testable Cases and Scenarios; National Highway Traffic Safety Administration: Washington, DC, USA, 2018. Available online: www.ntis.gov (accessed on 22 April 2025).
- Sun, C.; Edara, P.; Adu-Gyamfi, Y.; Reneker, J.; Zhang, S. Investigation of Autonomous/Connected Vehicles in Work Zones. December 2021. Available online: https://swzdi.intrans.iastate.edu/ (accessed on 22 April 2025).
- Khan, M.; Lemaster, D.; Najm, W.G. Understanding Safety Challenges of Vehicles Equipped with Automated Driving Systems (ADS)-Analysis of ADS Disengagements. 2024. Available online: https://www.transportation.gov/sites/dot.gov/files/2024-08/HASS_COE_Understanding_Safety_Challenges_of_Vehicles_Equipped_with_ADS_Aug2024.pdf (accessed on 22 April 2025).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Concepts | Synonyms/Related Terms |
|---|---|
| Automated vehicle | Self-driving car, automated vehicle, automated car, driverless vehicle |
| Work zone | Construction zone, roadwork, road construction |
| Navigation challenges | Lane shift, obstacle, detour, cones, temporary signage |
| Major AV companies with public road testing | Tesla, Waymo |
| Year | Location | Work Zone Condition | Major Disengagement/ Assistance | Waymo Overall User Perception |
|---|---|---|---|---|
| 2021 [17] | Chandler, Arizona | Construction cones at an intersection. | Yes | Negative |
| 2022 [18] | Phoenix, Arizona | Barriers, jaywalkers, wet conditions, red light. | No | Positive |
| 2023 [19] | Tempe, Arizona | Posted speed limit of 35 mph. | No | Negative |
| 2023 [20] | Los Angeles, California | Required abrupt lane changes, light rain and dense fog. | Yes | Mixed |
| 2023 [21] | N/A | Active construction equipment. | No | Positive |
| 2023 [22] | N/A | Active construction site with irregular layout, open trench, scattered cones, presence of construction workers. | Yes | Negative |
| 2023 [23] | San Francisco, California | Multiple work zones, street cones, stationary motorcycle, temporary stop sign held by a construction crew, signage change from “Stop” to “Slow,” double-parked vehicle with an open door, presence of pedestrian, ongoing tree maintenance site, construction equipment. | No | Positive |
| 2024 [24] | Chandler, California | Unexpected layout changes, cones, presence of construction workers. | Yes | Negative |
| Year | Vehicle Model/Software Version | Work Zone Condition | Outcome | Major Disengagement/Assistance | Tesla User Overall Perception |
|---|---|---|---|---|---|
| 2018 [26] | Model 3 | Construction zone without lane markings, used cones. |
| No | Positive |
| 2018 [27] | Model X on Mad Max mode | Nighttime construction, Mad Max Lane changes, dynamic layout. |
| No | Positive |
| 2019 [28] | Autopilot 2019.40.1.1 (HW2.5) | Construction barrels obstructing lanes, limited visibility. |
| No | Positive |
| 2019 [29] | Model 3 (HW 3.0) | Construction zone with cones, no visible lane markings. |
| No | Positive |
| 2020 [30] | Autopilot 2020.8.1 | Rainy construction zone, low visibility, emergency braking triggered. |
| Yes | Mixed |
| 2020 [31] | Model 3 | Unclear road markings, cones present. |
| No | Positive |
| 2020 [32] | Autopilot 2020.16.2.1 | Motorway, roundabout in UK, construction zones with cones and temporary markings. |
| Yes | Mixed |
| 2020 [33] | Autopilot 2020.4.1 (HW 3.0) | Complex construction zone, cones, newly paved unmarked lanes. |
| No | Positive |
| 2020 [34] | Autopilot 2020.40.3 | Urban nighttime construction zones, narrow shifting lanes. |
| No | Positive |
| 2020 [35] | Model 3 2020.40.3 | A work zone, where cones directed the vehicle to cross a solid center line in construction. |
| No | Positive |
| 2021 [36] | Model 3 FSD Beta 10.5 | Construction-heavy area in Houston, Texas, worker with stop sign, potholes |
| Yes | Mixed |
| 2022 [37] | Model Y FSD Beta 10.69.2.2 | Nighttime, construction cones, blocked lane, confusion at intersections. |
| Yes | Negative |
| 2022 [38] | FSD | Five consecutive trials through a temporary right-hand lane defined by construction cones, slight uphill grade with clear lane marking and consistent cone placement |
| Yes | Negative |
| 2022 [39] | FSD | Gravel-strewn lane, uneven surfaces, cautious navigation. |
| No | Positive |
| 2022 [40] | FSD Beta 10.11.2 | Active construction zone with stop signs, cyclists, intersections, and traffic congestion, low visibility drone mounted on the vehicle captured the drive |
| No | Positive |
| 2023 [41] | FSD | Construction zone in Dallas, Texas with lane closure and residential navigation |
| No | Positive |
| 2023 [42] | FSD | Narrowed road section due to construction |
| No | Positive |
| 2023 [43] | FSD Beta | Construction zone with barriers. |
| No | Positive |
| 2023 [44] | Model 3 FSD Beta | Tight construction zone in Silicon Valley, California with human workers and construction equipment trimming trees |
| No | Positive |
| 2023 [45] | Model 3 | Road narrowing with large pothole |
| Yes | Negative |
| 2023 [46] | Model Y FSD Beta | Cone-dense construction zone, conservative speed (California). |
| No | Positive |
| 2024 [47] | Model 3 FSD 12.3.3 | Complex work zone with shifting lanes, scattered cones, and temporary signage. |
| No | Positive |
| 2024 [48] | Model 3 FSD 12.3.3 | Construction zone with cones and lane shifts |
| No | Positive |
| 2024 [49] | FSD Beta 12 | Fenced-off construction area with road closure and adjacent equipment |
| No | Positive |
| 2024 [50] | FSD 12.3.6 | Dynamic construction zone, uneven pavement, cone density. |
| No | Positive |
| 2024 [51] | FSD 12.3.6 | City streets, highways, and an active construction zone; Light, intermittent rain |
| No | Positive |
| 2024 [52] | Cybertruck FSD | Road closure due to construction on the main road |
| No | Positive |
| 2024 [53] | Model 3 Autopilot | Urban driving in Pittsburgh, Pennsylvania with stop-and-go traffic near temporary lane closures in active construction areas. |
| No | Positive |
| 2024 [54] | FSD 12.3.6 | Complex, constrained construction work zone in Queens, New York City. |
| No | Positive |
| 2024 [55] | FSD | Urban construction zone with complex (inactive signals, road closures, construction barriers) |
| Yes | Negative |
| Rank | Challenge Category | Challenge Subcategories | Tesla | Waymo | Total Frequency |
|---|---|---|---|---|---|
| 1 | Perception & Sensing |
| 28 | 2 | 30 |
| 2 | Infrastructure Compliance & Navigation |
| 19 | 6 | 25 |
| 3 | Human Interaction & Override |
| 17 | 4 | 21 |
| 4 | Decision-Making & Planning |
| 13 | 2 | 15 |
| 5 | Control & Speed Management |
| 11 | 1 | 12 |
| 6 | Adverse Weather Conditions |
| 1 | 1 | 2 |
| All | All | All | 89 | 16 | 105 |
| Rank | Strength Category | Strength Subcategories | Tesla | Waymo | Total Frequency |
|---|---|---|---|---|---|
| 1 | Decision-Making & Planning |
| 32 | 6 | 38 |
| 2 | Perception & Sensing |
| 27 | 3 | 30 |
| 3 | Control & Speed Management |
| 25 | 3 | 28 |
| 4 | Infrastructure Compliance & Navigation |
| 13 | 1 | 14 |
| 5 | Human Interaction & Override |
| 5 | 2 | 7 |
| Total | All | All | 102 | 15 | 117 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ansarinejad, M.; Ansarinejad, K.; Lu, P.; Huang, Y. User Experience of Navigating Work Zones with Automated Vehicles: Insights from YouTube on Challenges and Strengths. Smart Cities 2025, 8, 120. https://doi.org/10.3390/smartcities8040120
Ansarinejad M, Ansarinejad K, Lu P, Huang Y. User Experience of Navigating Work Zones with Automated Vehicles: Insights from YouTube on Challenges and Strengths. Smart Cities. 2025; 8(4):120. https://doi.org/10.3390/smartcities8040120
Chicago/Turabian StyleAnsarinejad, Melika, Kian Ansarinejad, Pan Lu, and Ying Huang. 2025. "User Experience of Navigating Work Zones with Automated Vehicles: Insights from YouTube on Challenges and Strengths" Smart Cities 8, no. 4: 120. https://doi.org/10.3390/smartcities8040120
APA StyleAnsarinejad, M., Ansarinejad, K., Lu, P., & Huang, Y. (2025). User Experience of Navigating Work Zones with Automated Vehicles: Insights from YouTube on Challenges and Strengths. Smart Cities, 8(4), 120. https://doi.org/10.3390/smartcities8040120