Abstract
The ranging error model is generally very complicated in actual ranging technologies. This paper gives an analysis of the biased distance substitution and proposes an unbiased multilateral positioning method to revise the biased substitution, making it an unbiased estimate of the squared distance. An unbiased estimate of the multilateral positioning formula is derived to solve the target node coordinates. Through simulation experiments, it is proved that the algorithm can improve the positioning accuracy, and the improvement is more obvious when the error variance is larger. Experiments using SX1280 also show that the ranging conforms to the biased error model, and the accuracy can be improved by using the unbiased estimator. When the actual experimental error standard deviation is 0.16 m, the accuracy can be improved by 0.15 m.
1. Introduction
With the progress of society and the development of science and technology, positioning technology is influencing all aspects of people’s lives and has become an indispensable application for people []. The huge application value of positioning technology has attracted many researchers devoting themselves to it, and many mature technologies have been put into daily use, such as GPS (Global Positioning System) and UWB (Ultra-Wide Band) technology. As an emerging positioning technology, LoRa (Long Range Radio) also shows great research potential [].
At the same time, in order to obtain more accurate positioning information, related positioning algorithms have also been proposed one after another. It is undeniable that the advantages and disadvantages of the positioning algorithm affect the positioning accuracy of the entire system, and different positioning algorithms are proposed according to the different measured data and the different coordinate calculation methods used. Depending on whether distances need to be measured, localization algorithms are divided into two categories: range-based and range-free [].
For range-based positioning algorithms, a great challenge is to reduce the impact of ranging errors caused by equipment and the environment, so that the positioning result is closer to the target node. For the ranging error model that obeys unbiased estimation, there are many classical algorithms proposed to solve the position of the target node, such as the Chan algorithm [] and the Taylor algorithm []. These algorithms establish positioning models with Euclidean distances between anchors whose coordinates are known and the target node whose coordinates are to be estimated, then an estimator of the target node’s coordinates can be derived expressed by those distances. Additionally, if the distances between anchors and the target node can be measured, or if travel time can be measured, these measurements could be substituted into the estimator to perform the calculation. However, when error inevitably exists in the measurements, merely substitution of distances with measurements may cause biased results. In particular, most of the existing localization methods are based on simple error model assumptions, which ignore the complexity of the actual error model, especially the fact that the square of the ranging value may be a biased estimator. If the squared value of ranging is involved in the solution process, it may lead to biased results.
In order to illustrate the problem of this biased distance estimator, this paper analyzes and derives a type of ranging error model, whose error variance increases as distances increase, and draws a conclusion: for those biased situations, localization accuracy can be improved if the variance of the ranging error model can be known. Theoretically, the method in this paper is suitable for a positioning algorithm that adopts the square value of the ranging, which can make further improvements of localization accuracy. This paper verifies the improving feasibility of a ranging error model through simulations and practical experiments. More importantly, it shows that the improvement of unbiased estimation of complex ranging error models can improve the positioning accuracy. Similar improvements to unbiased estimators for other ranging error models can also make similar improvements for localization accuracy.
2. Related Work
The trilateral localization algorithm is a basic algorithm [] that has been studied and improved by many researchers. In the ideal trilateral positioning algorithm where there is no ranging error, there is a unique solution to the position of the target node.
Regarding the ranging error, an improved trilateral centroid localization algorithm was proposed in [,]. The fuzzy C-means clustering method was used to cluster the RSSI (Received Signal Strength Indicator) signals transmitted by anchors to target nodes to eliminate the noise of small probability and large interference. Aiming at the influence of distance deviation on the multilateral positioning algorithm, Ref. [] proposed an improved multilateral positioning algorithm KC-Multilaterate, which introduced the K-means clustering method into the positioning problem of wireless sensor networks to make the positioning error smaller. On this basis, Ref. [] proposed a weighted centroid localization algorithm based on K-means clustering point density (KCPD-WCLA). As a result, its computational complexity is significantly reduced and the positioning accuracy is significantly improved. Chen [] uses the Fang algorithm to calculate the coordinates of target node, but the Fang algorithm can easily generate double solutions, which can result in the positioning accuracy being greatly reduced when there is a large measurement value error. Gustafsson [] uses the nonlinear least squares algorithm to directly solve the nonlinear equation system, and uses a Gauss–Newton-like method to find the minimum value of the cost function. This positioning method is accurate but not stable enough. When the initial value is not suitable, the formula is prone to local convergence. Other studies [,,,,] linearized the nonlinear equation system through using the Taylor series expansion, which reduced the computational complexity. However, the optimal solution could not be guaranteed, because the high-order terms were ignored in the linearization process and a suitable initial value is still needed to ensure convergence. Further studies [,,,,] use the linear least squares algorithm to convert the nonlinear equation system into a linear equation system, and then solve the linear equation system through least squares algorithm, which can successfully solve the initial value problem. However, the positioning results will be greatly affected by the measurement error. Furthermore, Refs. [,] use the Chan algorithm to calculate the approximate coordinates of the target node. The algorithm adopts the weighted least squares algorithm, and assigns different weights to each equation in the equation system according to the ranging error, which improves the positioning accuracy. In the calculation process of all the above algorithms, the squares of the distances are directly substituted into the model for calculation. However, from a statistical point of view, it is not an unbiased estimator. In this context, we take multilateral positioning as an example and explore the impact of unbiased estimation for the positioning model and verify it using SX1280, showing that using unbiased estimator can improve the positioning accuracy, and when the error variance is larger, the improvement of the algorithm is more obvious.
3. Multilateral Positioning Model
For the multilateral positioning algorithm on a two-dimensional plane shown in Figure 1, the coordinates of anchor nodes are known as ……. Assuming that the coordinate of the target node is T, the true distance between the target node and anchor node is , the following equation can be obtained:
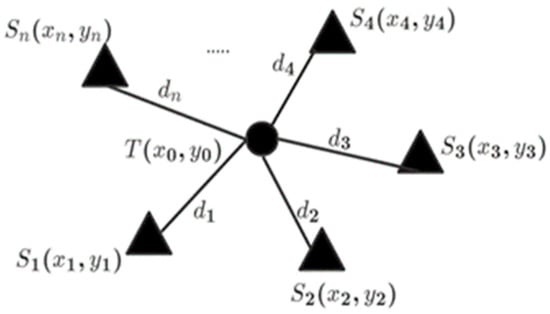
Figure 1.
Principle of two-dimensional plane multilateral positioning.
Equation (1) can be transformed to a linear one by subtracting the last equation from other equations, and after deformation, it can be expressed as a linear one:
where the coefficient matrix A is:
and B is:
The estimated coordinate values of the target node can be calculated by least square method:
and if ranging technologies such as UWB or LoRa is utilized, the ranging information between the target node and anchor node can be obtained. Suppose the ranging distances are denoted as , by substituting as in Equation (5), we can get an estimator of the target node.
4. Unbiased Estimator of Multilateration Model
Equation (5) is a classical and simple estimator. However, in the actual positioning process, ranging errors are inevitable due to the influence of various environments. It is assumed that the mean square error of the ranging is
When the ranging error model satisfies, the mean square error is the variance of the environmental noise e and is not affected by the actual distance. This type of error model satisfies the unbiased estimation, and can use the Chan algorithm, Taylor algorithm, etc. to solve the coordinates of the target node. In actual positioning, the error model is often more complicated. As an illustration, the variance of SX1280 meets []:
where N is the configurable number of CSS (Chirp Spread Spectrum) symbols used in the ranging data, BW (bandwidth) = 403 kHz, SF (Spreading Factor) and a Signal to Noise Ratio (SNR), which decreases with distance. It can be concluded that will increase with the increase of . In order to illustrate the impact of unbiased estimators, the error model is simplified in this paper as a linear one, in which the relationship between the mean square error and is constructed to satisfy:
where the random distribution e follows the normal distribution .
Therefore, can be obtained from Equation (8). Since the expectation of a random distribution is 0, we get
It can be seen that is not an unbiased estimator of . If it is directly substituted into the multilateral positioning formula, the solution value will deviate from the target node. By deforming Equation (9), it can be found that is the unbiased estimate of , namely:
Substitute this expression into Formula (2), where B is improved as:
When the ranging error model obeys Equation (9), and the statistical variance value in the ranging error model is known, the squared value of ranging can be corrected by Equation (10) to obtain an unbiased estimate of the true distance. When the ranging information used by the positioning algorithm is the squared value of the ranging, such as in (4), the corrected ranging value can be substituted into the formula to locate the target node, as shown in (11).
5. Experiments and Results
Both simulation and SX1280 based experiments are carried out to verify the effectiveness of our unbiased estimation. As for positioning error, the commonly used positioning accuracy evaluation indexes are the root mean square error and the error cumulative distribution function. Root mean square error (RMSE) refers to the sum of the square error between the measured value and the corresponding true value []:
Cumulative Distribution Function (CDF) can accurately represent the probability distribution of different random variables, and the cumulative distribution function curve can more clearly represent the positioning error of the positioning system. The cumulative distribution function is defined as follows:
5.1. Simulation Experiment
Simulations were carried out in an area of 100 × 100 m. Three anchor nodes were placed at (100, 100), (0, 100) and (100, 0) respectively, and the target node was assumed to be at (50, 50). The ranging error model used was , where e obeys a normal distribution with mean 0 and standard deviation σ meters. It can be seen from Figure 2 that as the variance in the error model increases, the positioning errors of the two algorithms will increase, but the positioning errors solved by the unbiased multilateral positioning method grow more slowly, that is, they are less susceptible to fluctuations in ranging errors. It can be concluded that, when compared with the multilateral positioning method, the unbiased multilateral positioning method can improve the positioning error, and the degree of improvement will increase with the increase of the variance in the ranging error model.
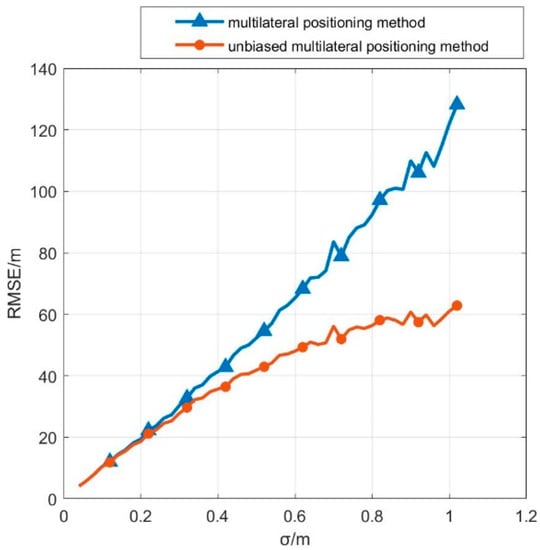
Figure 2.
Comparison of root mean square error between multilateral positioning method and unbiased multilateral positioning method.
For the next experiment, the positions of the three anchor nodes remained unchanged, namely at (100, 100), (0, 100) and (100, 0) respectively, and the target node was set at (50, 50). The ranging error model was again , where e obeys a normal distribution with mean 0 and a standard deviation of 1 m. The experiment was repeated 1000 times, enabling the creation of the scatter plot shown in Figure 3. The cumulative distribution function graph of the solutions can be shown in Figure 4.
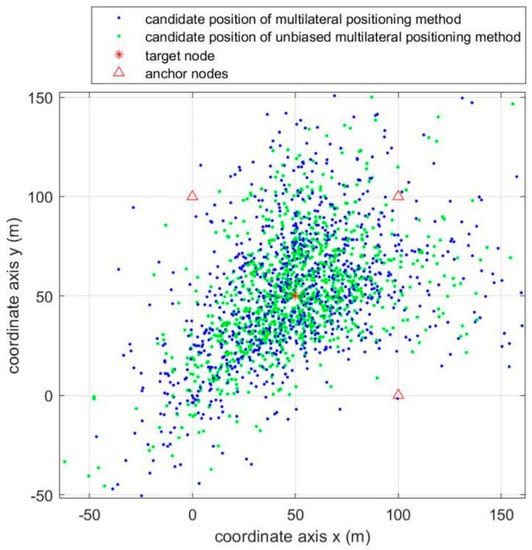
Figure 3.
Two algorithm positioning scatter plots.
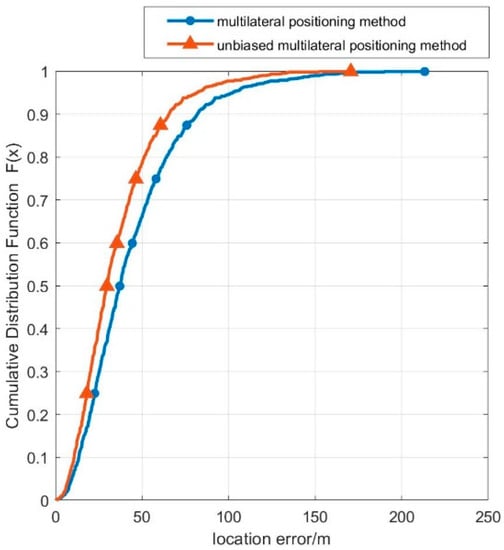
Figure 4.
CDF (Cumulative Distribution Function) graph of two algorithms.
It can be seen intuitively from the Figure 3 that by using the unbiased multilateral positioning method to locate the target node, the estimated coordinates are closer to target node, while the estimated coordinates of the multilateral positioning method are relatively divergent.
It can be seen from Figure 4 that 70% of the positioning errors of the unbiased multilateral positioning method are within 45 m and 80% are within 50 m of the target node, while 80% of the positioning errors of the multilateral positioning method are within 60 m. Compared with the multilateral positioning method, the unbiased multilateral positioning method shows an obvious improvement on the error.
5.2. Experimental Verification and Discussion
Experiments were also carried out to perform the verification based on SX1280 chip (LoRa 2.4G). A basketball court with an area of about 30 m × 40 m was selected as the actual test site, as shown in Figure 5. The anchors are at the four corners of the outdoor basketball court. Three anchors are placed at , and respectively, and the target node is placed at .
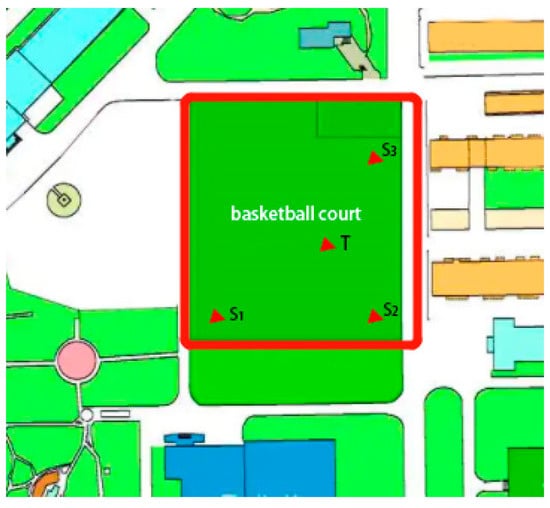
Figure 5.
The basketball court environment.
It is known from the above that the SX1280 ranging error model approximately obeys the formula , so the obtained data is processed: it is known that the actual distances from the target node to the three anchors are 28.5 m, 15.7 m, and 20 m respectively. Therefore, the ranging data is processed to obtain , which is the e in the error model, and frequency statistics are performed to obtain a histogram, as shown in Figure 6.
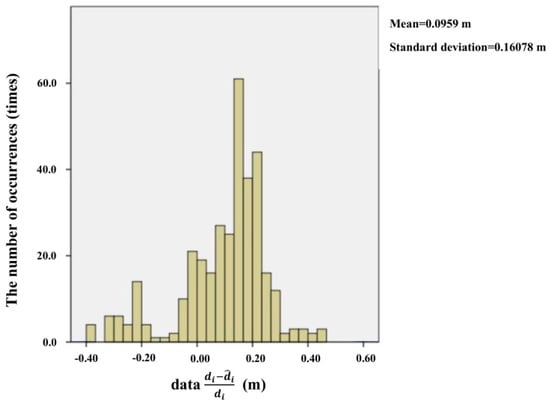
Figure 6.
Histogram distribution of ranging error data .
As can be seen from Figure 6, the error data e is a random sequence with a mean of approximately 0 and a standard deviation of 0.16078 m. Once the standard deviation of the ranging error distribution is known, the unbiased estimator can be used for positioning optimization.
For the actual experimental data obtained, the position of the target node is estimated by the multilateral positioning method and the unbiased multilateral positioning method respectively. The root mean square error is used to evaluate the positioning accuracy of the two, and the results are shown in Table 1. The results show that unbiased multilateral positioning method can improve the accuracy of the positioning system.

Table 1.
Location error data under two algorithms.
6. Conclusions
In the study of existing positioning algorithms, a simple substitution of measured distances is often used in the estimation of the target node’s position. In actual positioning, the ranging error model is more complicated, and it is often related to the actual ranging distance, as the experiments using SX1280 exemplified in this paper. Since the squared value of distance measurement is not an unbiased estimator of the squared value of the actual distance, when using the traditional multilateral positioning algorithm to solve the target node, directly substituting the distance measurement data often deviates from reality. Based on this, this paper adds the correction of the squared value of biased ranging to the existing positioning algorithm, making it an unbiased estimator. Both theoretical simulation experiments and actual experiments using SX1280 show that using an unbiased estimator can improve the positioning accuracy. It can also be concluded from the theoretical data that the improvement of the algorithm is more obvious when the error variance is larger. Theoretically, the method in this paper is suitable for the positioning algorithm involving the square value of the ranging, which is a further improvement of the accuracy of the existing algorithm.
Author Contributions
Writing—original draft preparation, Y.Y., S.S., A.C., S.Y., Y.S. and D.S.; writing—review and editing, Z.L. and D.S. All authors have read and agreed to the published version of the manuscript.
Funding
Science and Technology Development Program of Jilin Province: 20200401089GX.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Zhao, J.; Li, Y.; Yue, Q.; He, N. Application and prospect analysis of wireless sensor network technology. Jiangsu Sci. Technol. Inf. 2019, 35, 51–53. [Google Scholar]
- Liu, Y.; Wu, S.; Chen, S.; Xiao, Y. Research on low-power long-distance positioning based on LoRa. Inf. Technol. 2019, 43, 5. [Google Scholar]
- Tian, X.; Wei, G.; Wang, G. Comprehensive Wireless Sensor Network Positioning. Inf. Control. 2022, 51, 69–87. [Google Scholar]
- Chan, Y.T.; Ho, K.C. A simple and efficient estimator for hyperbolic location. IEEE Trans. Signal Processing 1994, 42, 1905–1915. [Google Scholar] [CrossRef] [Green Version]
- Foy, W.H. Position-location solutions by Taylor-series estimation. IEEE Trans. Aerosp. Electron. Syst. 1976, 12, 187–194. [Google Scholar] [CrossRef]
- Shuo, S.; Sun, H.; Song, Y. Design of an experimental indoor position system based on RSSI. In Proceedings of the 2010 2nd International Conference on Information Science and Engineering, Hangzhou, China, 4–6 December 2010; pp. 1989–1992. [Google Scholar]
- Li, H.; Yu, D.; Hu, Y.; Yu, H. An improved trilateral centroid localization algorithm for wireless sensor networks. Small Microcomput. Syst. 2020, 41, 8. [Google Scholar]
- Gang, W.; Lin, L. An Improved Trilateral Localization Algorithm Based on Fuzzy C-means Clustering. In Proceedings of the 2021 5th International Conference on Electronic Information Technology and Computer Engineering, Xiamen, China, 22–24 October 2021; pp. 1013–1017. [Google Scholar]
- Sun, D.; Qian, Z.; Han, M.; Wang, X. Improved algorithm for cluster analysis of multilateral positioning in wireless sensor networks. Chin. J. Electron. 2014, 42, 147–153. [Google Scholar]
- Zhang, Y.; Zhou, L.; Tang, R.; Min, Y. WSNs weighted centroid localization algorithm based on K-means clustering point density. Sens. Microsyst. 2015, 34, 125–127,131. [Google Scholar]
- Chen, S. TDOA indoor location technology based on Fang algorithm. J. Terahertz Sci. Electron. Inf. Technol. 2017, 15, 753–754. [Google Scholar]
- Gustafsson, F. Mobile positioning using wireless networks: Possibilities and fundamental limitationsbased on available wireless network measurements. IEEE Signal Processing Mag. 2005, 22, 41–53. [Google Scholar] [CrossRef]
- Zhang, W.; Ma, H.; Wu, T.; Li, G. A Location Algorithm of Ground Interference Sources Using Satellites FDOA Meas- urements Based on Taylor Series Expansion. J. Radio Commun. Technol. 2019, 45, 385–390. [Google Scholar]
- Zhang, H.; Shi, X.; Deng, G.; Gao, X.J.; Ren, M.R. Research on indoor location technology based on back propagation neural network and taylor series. Acta Electron. Sin. 2012, 40, 1876–1879. [Google Scholar]
- Qi, X.; Yuan, L.; Liu, L. Hybrid location algorithm for the acoustic source based on error correction. J. Xidian Univ. 2019, 46, 1–7. [Google Scholar]
- Stefanski, J.; Sadowski, J. TDOA versus ATDOA for wide area multilateration system. EURASIP J. Wirel. Commun. Netw. 2018, 2018, 179. [Google Scholar] [CrossRef] [Green Version]
- Zhang, B. Taylor—Series expansion location algorithm based on RBF neural network. Comput. Eng. Appl. 2006, 45, 245–248. [Google Scholar]
- Cui, X.; Yu, K.; Lu, S. Approximate closed—Form TDOA—Based estimator for acoustic direction finding via constrained optimization. IEEE Sens. J. 2018, 18, 3360–3371. [Google Scholar] [CrossRef]
- Guvenc, I.; Gezici, S.; Sahinoglu, Z. Fundamental limits and improved algorithms for linear least—Squares wireless position estimation. Wirel. Commun. Mob. Comput. 2012, 12, 1037–1052. [Google Scholar] [CrossRef]
- Hou, H.; Huang, D.S.; Guo, S.J.; Cheng, M. Research on Total Least Squares Underwater Short Baseline Location Algorithm Based on Taylor Series Expansion. Audio Eng. 2020, 44, 24–27. [Google Scholar]
- Jiang, L.; Xu, H.; Zhang, L.; Xiong, S. 3D Localization Algorithm Based on Linear Regression and Least Square in NLOS Environment. J. Hunan Univ. Technol. 2019, 33, 23–28. [Google Scholar]
- Kumar, V.; Arablouei, R.; De Hoog, F.; Jurdak, R.; Kusy, B.; Bergmann, N.W. Pseudo—Linear localization using perturbed RSSI measurements and inaccurate anchor positions. Pervasive Mob. Comput. 2019, 52, 46–59. [Google Scholar] [CrossRef]
- Paula, T.; Bernardos, A.M.; Casar, J.R. Weighted least squares techniques for improved received signal strength based localization. Sensors 2011, 11, 8569–8592. [Google Scholar]
- Dong, C.; Zhou, L. Commodity car location method based on RFID and improved Chan algorithm. Comput. Technol. Dev. 2019, 11, 195–198. [Google Scholar] [CrossRef]
- Muller, P.; Stoll, H.; Sarperi, L.; Schupbach, C. Outdoor Ranging and Positioning based on LoRa Modulation. In Proceedings of the 2021 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 1–3 June 2021. [Google Scholar]
- Jiang, X. Low-Power Positioning Scheme Based on LoRa Technology. Master’s Thesis, University of Electronic Science and Technology of China, Chengdu, China, 2019. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).