
A Stable IIR Filter Design Approach for High-Order Active Noise Control Applications


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
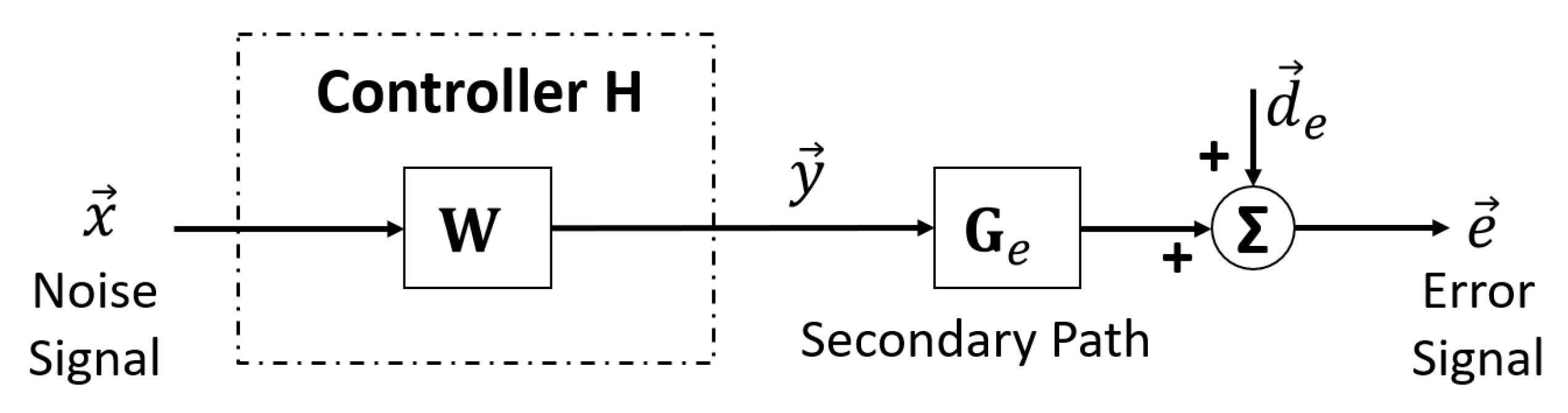
2. Methods
2.1. Review of Traditional Stable IIR Filter Fitting Method
2.2. Review of a Weighted Least-Square Approximation Method
2.3. Proposed Improvements in Weighted Least-Square Approximation Method for ANC Applications
| Algorithm 1: Finding an appropriate weighting function |
Input: desired weighting curve in the frequency domain; the order of weighting filter K Output: the weighting coefficients
|
| Algorithm 2: Finding the optimal IIR filter denominator coefficients |
 |
| Algorithm 3: Finding the optimal IIR filter numerator coefficients |
Input: FIR filter coefficients , the order of IIR numerator M, the weighting function in Algorithm 1, IIR denominator in Algorithm 2. Output: fitted IIR numerator
|
3. Results
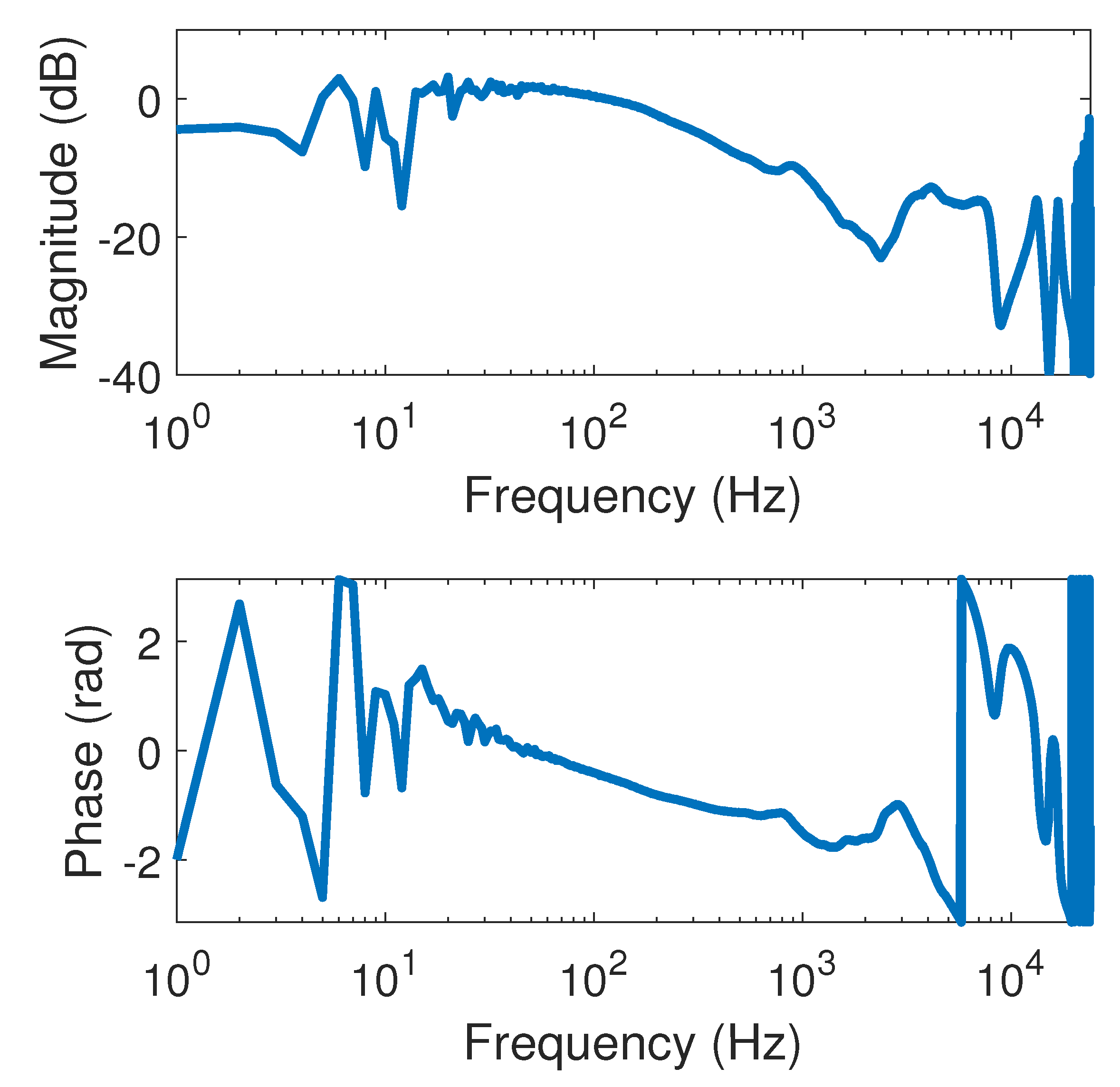
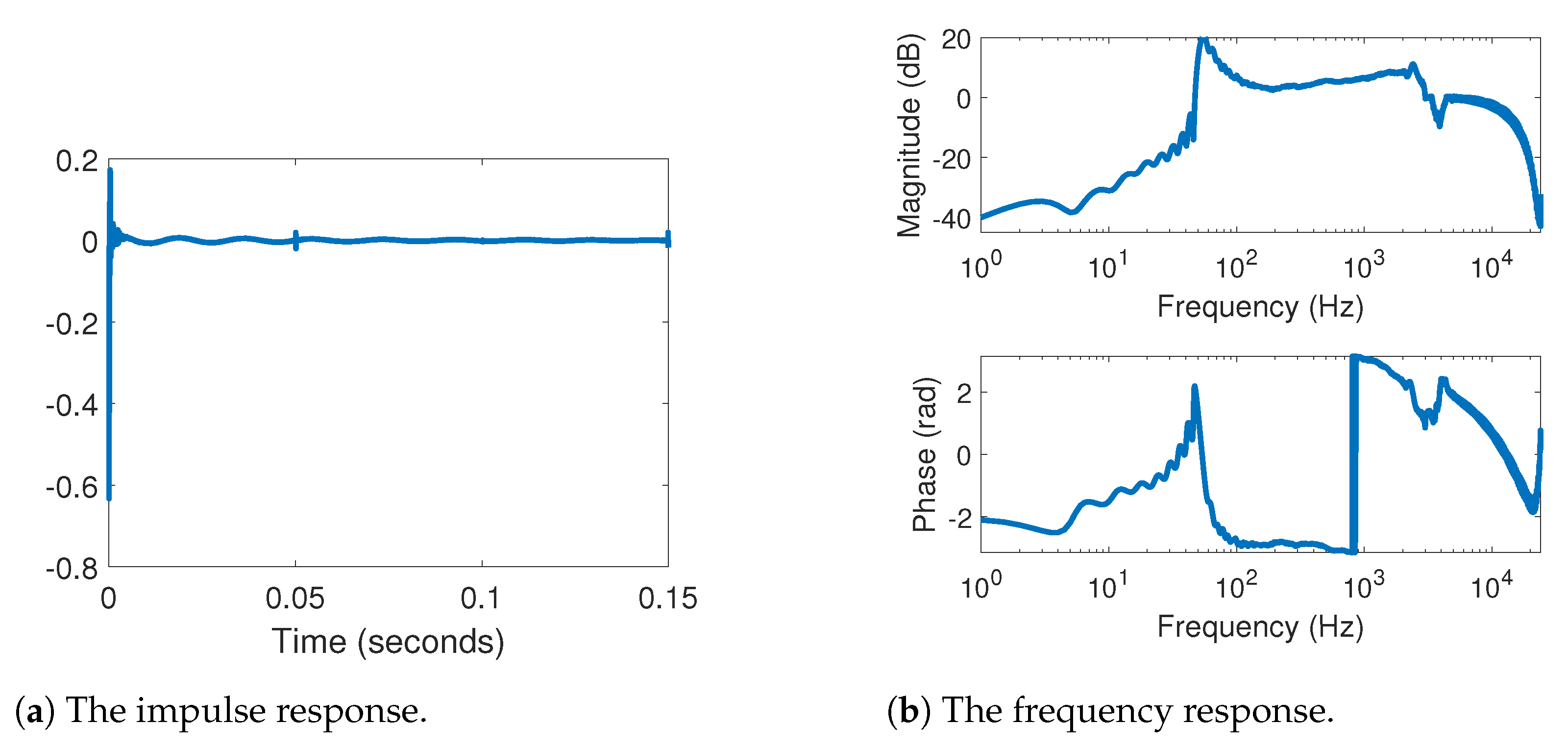
3.1. Experimental Setup Description
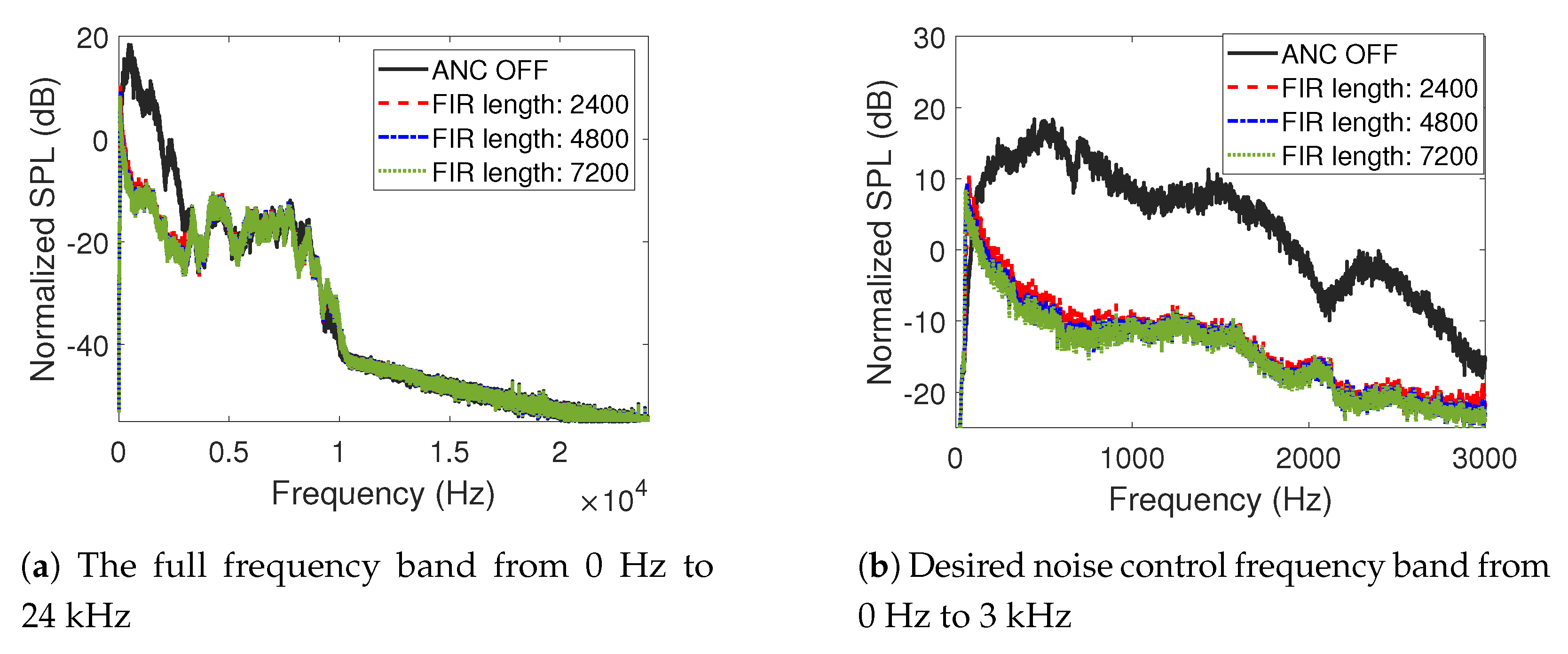
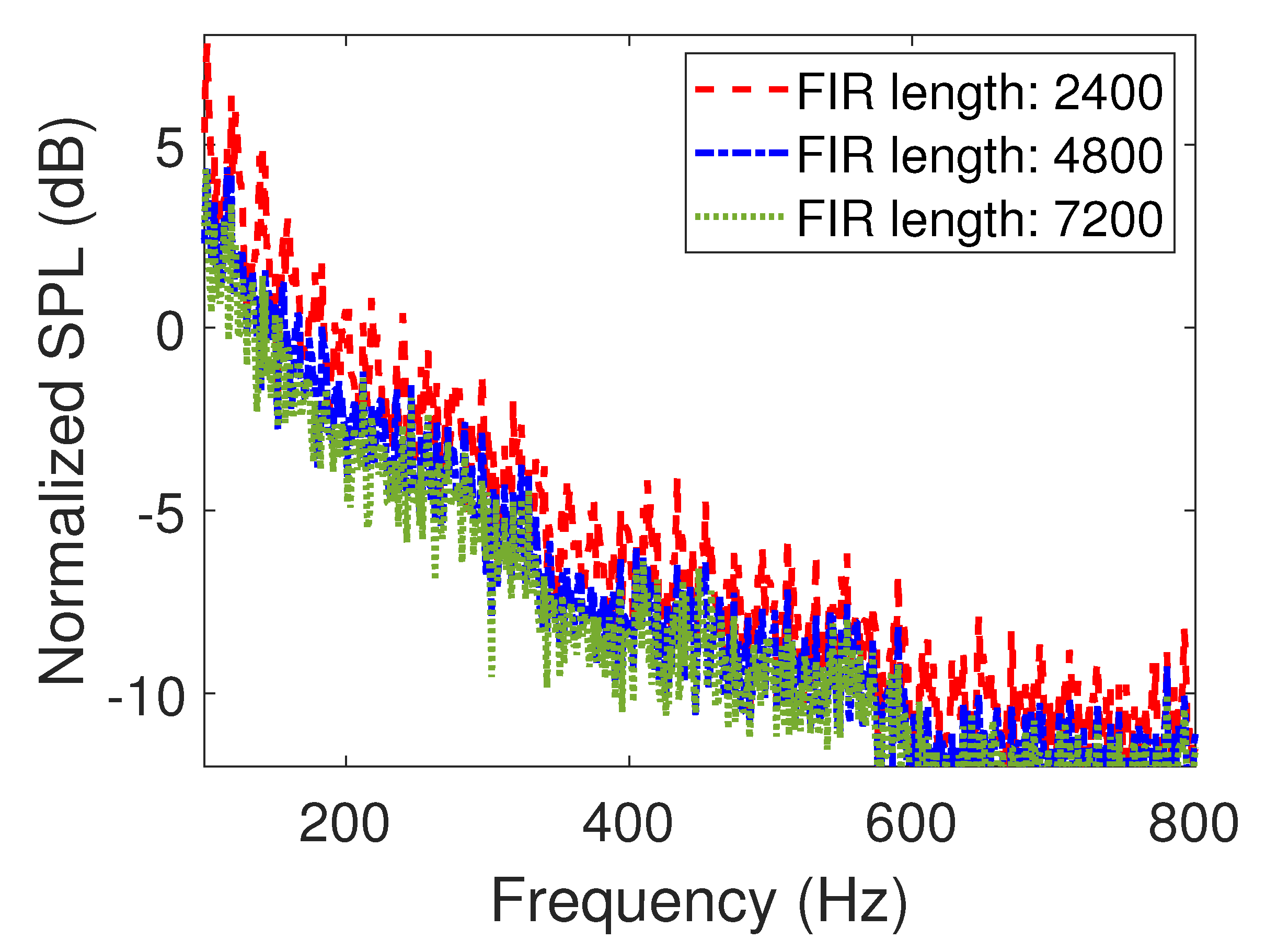
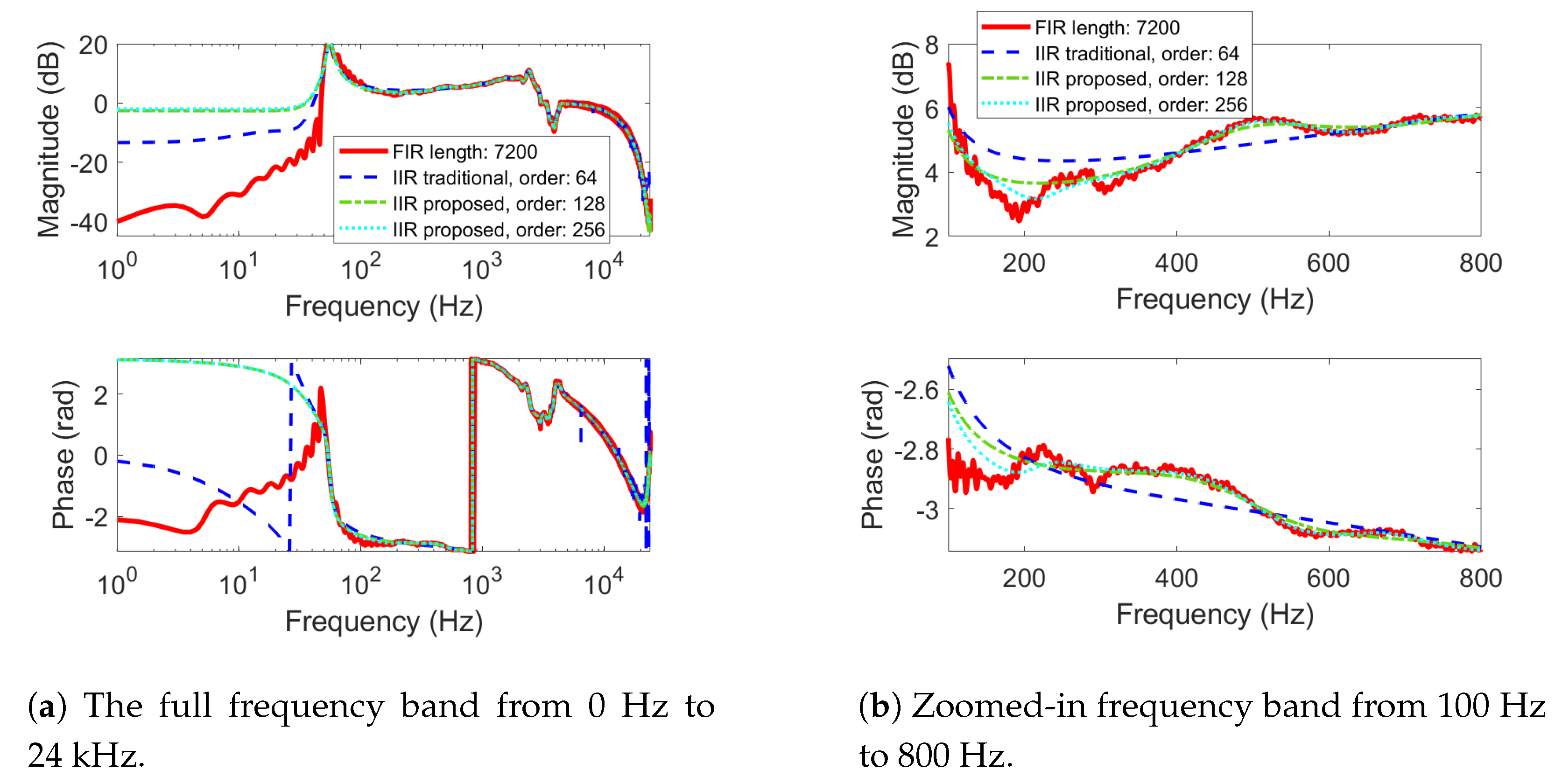
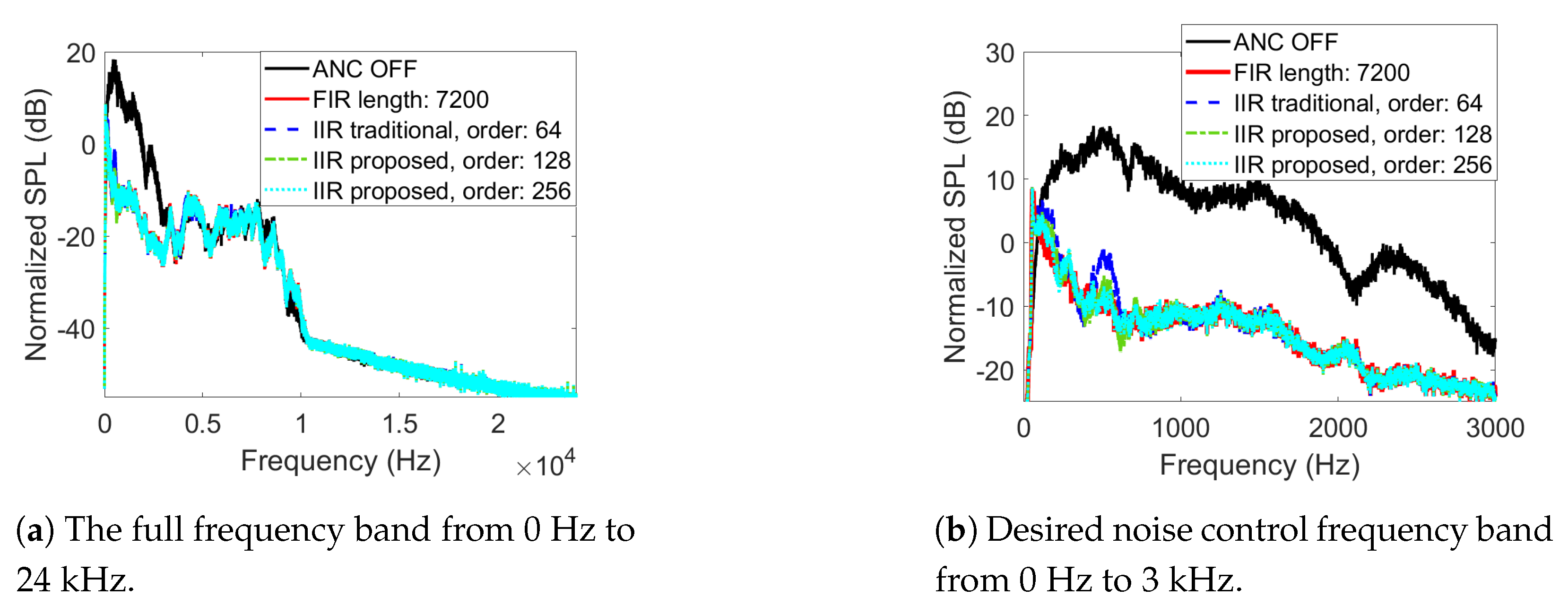
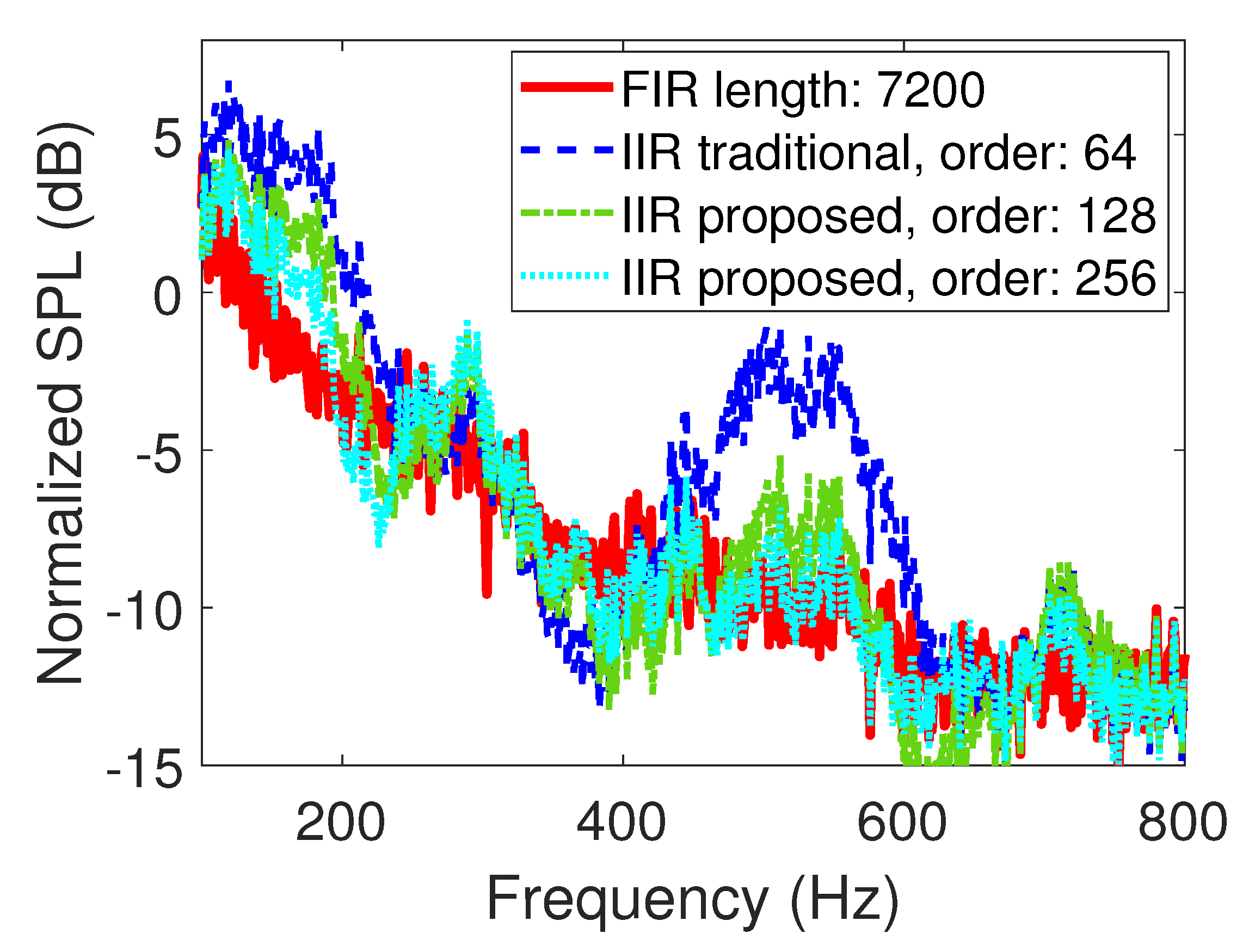
3.2. Comparison of Fitting Accuracy and Noise Control Performance
4. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ANC | Active noise control |
| FIR | Finite impulse response |
| IIR | Infinite impulse response |
| FFT | Fast Fourier transform |
| IFFT | Inverse Fourier transform |
References
- Bean, J.; Schiller, N.; Fuller, C. Numerical Modeling of an Active Headrest. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings, Hong Kong, China, 27–30 August 2017; Institute of Noise Control Engineering: Washington, DC, USA, 2017; Volume 255, pp. 4065–4075. [Google Scholar]
- Cheer, J.; Elliott, S.J. Multichannel control systems for the attenuation of interior road noise in vehicles. Mech. Syst. Signal Process. 2015, 60, 753–769. [Google Scholar] [CrossRef]
- Kajikawa, Y.; Gan, W.S.; Kuo, S.M. Recent advances on active noise control: Open issues and innovative applications. Apsipa Trans. Signal Inf. Process. 2012, 1, e3. [Google Scholar] [CrossRef]
- Zhuang, Y.; Liu, Y. Constrained optimal filter design for multi-channel active noise control via convex optimization. J. Acoust. Soc. Am. 2021, 150, 2888–2899. [Google Scholar] [CrossRef] [PubMed]
- Zhuang, Y.; Liu, Y. A numerically stable constrained optimal filter design method for multichannel active noise control using dual conic formulation. J. Acoust. Soc. Am. 2022, 152, 2169–2182. [Google Scholar] [CrossRef] [PubMed]
- Shi, D.; Gan, W.S.; He, J.; Lam, B. Practical implementation of multichannel filtered-x least mean square algorithm based on the multiple-parallel-branch with folding architecture for large-scale active noise control. IEEE Trans. Very Large Scale Integr. (Vlsi) Syst. 2019, 28, 940–953. [Google Scholar] [CrossRef]
- Ho, C.Y.; Shyu, K.K.; Chang, C.Y.; Kuo, S.M. Development of equation-error adaptive IIR-filter-based active noise control system. Appl. Acoust. 2020, 163, 107226. [Google Scholar] [CrossRef]
- Wu, L.; Qiu, X.; Guo, Y. A generalized leaky FxLMS algorithm for tuning the waterbed effect of feedback active noise control systems. Mech. Syst. Signal Process. 2018, 106, 13–23. [Google Scholar] [CrossRef]
- Lam, B.; Gan, W.S.; Shi, D.; Nishimura, M.; Elliott, S. Ten questions concerning active noise control in the built environment. Build. Environ. 2021, 200, 107928. [Google Scholar] [CrossRef]
- Bai, M.R.; Lin, Y.; Lai, J. Reduction in electronic delay in active noise control systems—A multirate signal processing approach. J. Acoust. Soc. Am. 2002, 111, 916–924. [Google Scholar] [CrossRef] [PubMed]
- Rout, N.K.; Das, D.P.; Panda, G. Computationally efficient algorithm for high sampling-frequency operation of active noise control. Mech. Syst. Signal Process. 2015, 56, 302–319. [Google Scholar] [CrossRef]
- Parks, T.W.; Burrus, C.S. Digital Filter Design; Wiley-Interscience: Hoboken, NJ, USA, 1987. [Google Scholar]
- Steiglitz, K.; McBride, L. A technique for the identification of linear systems. IEEE Trans. Autom. Control. 1965, 10, 461–464. [Google Scholar] [CrossRef]
- Ljung, L. System Identification-Theory for the User, 2nd ed.; Ptr Prentice-Hall: Upper Saddle River, NJ, USA, 1999. [Google Scholar]
- Levy, E. Complex-curve fitting. IRE Trans. Autom. Control. 1959, AC-4, 37–43. [Google Scholar] [CrossRef]
- Dennis, J.E., Jr. Rb Schnabel Numerical Methods for Unconstrained Optimization and Nonlinear Equations; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1983. [Google Scholar]
- Calvetti, D.; Reichel, L. On the evaluation of polynomial coefficients. Numer. Algorithms 2003, 33, 153–161. [Google Scholar] [CrossRef]
- Sitton, G.A.; Burrus, C.S.; Fox, J.W.; Treitel, S. Factoring very-high-degree polynomials. IEEE Signal Process. Mag. 2003, 20, 27–42. [Google Scholar] [CrossRef]
- Brandenstein, H.; Unbehauen, R. Least-squares approximation of FIR by IIR digital filters. IEEE Trans. Signal Process. 1998, 46, 21–30. [Google Scholar] [CrossRef]
- Brandenstein, H.; Unbehauen, R. Weighted least-squares approximation of FIR by IIR digital filters. IEEE Trans. Signal Process. 2001, 49, 558–568. [Google Scholar] [CrossRef]
- Anderson, E.; Bai, Z.; Bischof, C.; Blackford, L.S.; Demmel, J.; Dongarra, J.; Du Croz, J.; Greenbaum, A.; Hammarling, S.; McKenney, A.; et al. LAPACK Users’ Guide; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1999. [Google Scholar]
- Zhuang, Y.; Liu, Y. An adaptive constrained multi-channel active noise control filter design approach using convex cone optimization. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings, Grand Rapids, MI, USA, 12–14 June 2017; Institute of Noise Control Engineering: Washington, DC, USA, 2023. [Google Scholar] [CrossRef]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhuang, Y.; Liu, Y. A Stable IIR Filter Design Approach for High-Order Active Noise Control Applications. Acoustics 2023, 5, 746-758. https://doi.org/10.3390/acoustics5030044
Zhuang Y, Liu Y. A Stable IIR Filter Design Approach for High-Order Active Noise Control Applications. Acoustics. 2023; 5(3):746-758. https://doi.org/10.3390/acoustics5030044
Chicago/Turabian StyleZhuang, Yongjie, and Yangfan Liu. 2023. "A Stable IIR Filter Design Approach for High-Order Active Noise Control Applications" Acoustics 5, no. 3: 746-758. https://doi.org/10.3390/acoustics5030044
APA StyleZhuang, Y., & Liu, Y. (2023). A Stable IIR Filter Design Approach for High-Order Active Noise Control Applications. Acoustics, 5(3), 746-758. https://doi.org/10.3390/acoustics5030044