

Deep Transfer Learning Models for Industrial Fault Diagnosis Using Vibration and Acoustic Sensors Data: A Review



Abstract
1. Introduction
1.1. Transfer Learning
- In order to provide the reader with an algorithmic grasp of DTL, this article introduces the reader to the fundamental concepts and theories of DTL, including instance-based DTL, model-based DTL, and feature-based DTL.
- This article discusses a crucial case of defect identification where the diagnostic model may be used to previously unexplored regions without knowledge of their data distributions. The alternative is more appropriate for real-world diagnostic tasks than conventional data-driven methods.
- The well-designed approach can handle machinery defect diagnostic duties efficiently. An experimental study demonstrates the significance and superiority of each generalization aim.
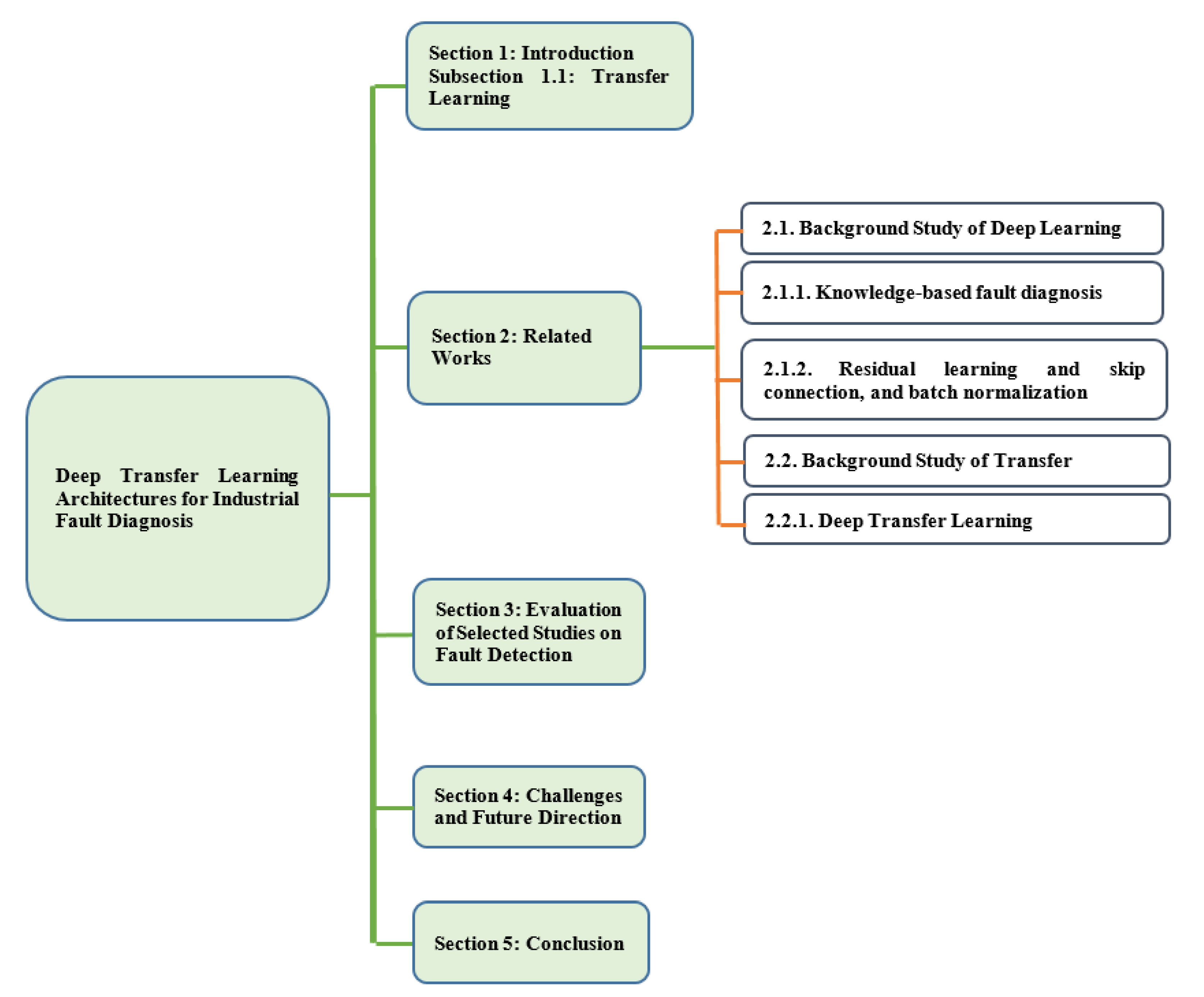
1.2. Objectives and Organization
- The primary focus of this study is the modeling of systems using both basic principles and signal form. In this FDD subject, it is essential to comprehend the fundamentals of data-driven methodologies, to define issues, and to provide views.
- In order to provide academics and practitioners a thorough knowledge from both a theoretical and an application viewpoint, the second purpose is to undertake a systematic evaluation of the growing research effort, the so-called data-driven FDD approaches, for traction systems during the previous ten years.
- On our third attempt, we attempted to classify into three categories. Fault detection Datasets, Deep Learning Based Papers, and Transfer Learning Based Papers are among the categories.
- With an emphasis on real-world applications and contemporary data analysis tools, the ultimate objective is to provide research possibilities in data-driven FDD approaches for traction systems, as well as research challenges and future prospects.
2. Related Works
2.1. Background Study of Deep Learning
2.1.1. Knowledge-Based Fault Diagnosis
2.1.2. Residual Learning and Skip Connection, and Batch Normalization
2.2. Background Study of Transfer Learning
Deep Transfer Learning
- Deep learning requires many pre-labeled samples in order to train a model. As was already said, one disadvantage of deep learning is that it mostly on direct observation to teach abilities. On the other hand, deep learning systems rely heavily on enormous amounts of labeled training data; without them, the algorithms are prone to overfitting and are weak at generalization.
- For deep learning to work, certain requirements must be met by the distributions between the training and test sets of data. This implies that, if a deep learning model is trained on data that does not match the planned data distribution, its performance will likely suffer greatly or perhaps fail.
3. Evaluation of Selected Studies on Fault Detection
3.1. Deep Learning Based Paper
3.2. Transfer Learning Based Paper
4. Challenges and Future Directions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Schrick, D. Remarks on terminology in the field of supervision, fault detection and diagnosis. IFAC Proc. 1997, 30, 959–964. [Google Scholar] [CrossRef]
- Dong, Y.; Li, Y.; Zheng, H.; Wang, R.; Xu, M. A new dynamic model and transfer learning based intelligent fault diagnosis framework for rolling element bearings race faults: Solving the small sample problem. ISA Trans. 2022, 121, 327–348. [Google Scholar] [CrossRef]
- Li, W.; Huang, R.; Li, J.; Liao, Y.; Chen, Z.; He, G.; Yan, R.; Gryllias, K. A perspective survey on deep transfer learning for fault diagnosis in industrial scenarios: Theories, applications and challenges. Mech. Syst. Signal Process. 2022, 167, 108487. [Google Scholar] [CrossRef]
- Yang, B.; Xu, S.; Lei, Y.; Lee, C.G.; Stewart, E.; Roberts, C. Multi-source transfer learning network to complement knowledge for intelligent diagnosis of machines with unseen faults. Mech. Syst. Signal Process. 2022, 162, 108095. [Google Scholar] [CrossRef]
- Gao, Z.; Cecati, C.; Ding, S.X. A survey of fault diagnosis and fault-tolerant techniques—Part I: Fault diagnosis with model-based and signal-based approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef]
- Lei, Y.; Lin, J.; Zuo, M.; He, Z. Condition monitoring and fault diagnosis of planetary gearboxes: A review. Measurement 2014, 48, 292–305. [Google Scholar] [CrossRef]
- Fong, A.C.M.; Hui, S. An intelligent online machine fault diagnosis system. Comput. Control Eng. J. 2001, 12, 217–223. [Google Scholar] [CrossRef]
- Li, B.; Chow, M.; Tipsuwan, Y.; Hung, J. Neural-network-based motor rolling bearing fault diagnosis. IEEE Trans. Ind. Electron. 2000, 47, 1060–1069. [Google Scholar] [CrossRef]
- Muruganatham, B.; Sanjith, M.; Krishnakumar, B.; Murty, S. Roller element bearing fault diagnosis using singular spectrum analysis. Mech. Syst. Signal Process. 2013, 35, 150–166. [Google Scholar] [CrossRef]
- Socher, R.; Huval, B.; Bath, B.; Manning, C.; Ng, A. Convolutional-Recursive Deep Learning for 3D Object Classification. NIPS 2012, 3, 8. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Deng, L.; Li, J.; Huang, J.; Yao, K.; Yu, D.; Seide, F.; Seltzer, M.; Zweig, G.; He, X.; Williams, J.; et al. Recent advances in deep learning for speech research at Microsoft. In Proceedings of the 2013 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Vancouver, BC, Canada, 26–30 May 2013; pp. 8604–8608. [Google Scholar]
- Hinton, G.; Deng, L.; Yu, D.; Dahl, G.; Mohamed, A.; Jaitly, N.; Senior, A.; Vanhoucke, V.; Nguyen, P.; Sainath, T.; et al. Deep neural networks for acoustic modeling in speech recognition: The shared views of four research groups. IEEE Signal Process. Magaz. 2012, 29, 82–97. [Google Scholar] [CrossRef]
- Lu, C.; Wang, Z.; Qin, W.; Ma, J. Fault diagnosis of rotary machinery components using a stacked denoising autoencoder-based health state identification. Signal Process. 2017, 130, 377–388. [Google Scholar] [CrossRef]
- Jia, F.; Lei, Y.; Lin, J.; Zhou, X.; Lu, N. Deep neural networks: A promising tool for fault characteristic mining and intelligent diagnosis of rotating machinery with massive data. Mech. Syst. Signal Process. 2016, 72, 303–315. [Google Scholar] [CrossRef]
- Huijie, Z.; Ting, R.; Xinqing, W.; You, Z.; Husheng, F. Fault diagnosis of hydraulic pump based on stacked autoencoders. In Proceedings of the 2015 12th IEEE International Conference on Electronic Measurement & Instruments (ICEMI), Qingdao, China, 6–18 July 2015; Volume 1, pp. 58–62. [Google Scholar]
- Guo, L.; Gao, H.; Huang, H.; He, X.; Li, S. Multifeatures fusion and nonlinear dimension reduction for intelligent bearing condition monitoring. Shock Vib. 2016, 2016, 4632562. [Google Scholar] [CrossRef]
- Verma, N.; Gupta, V.; Sharma, M.; Sevakula, R. Intelligent condition based monitoring of rotating machines using sparse auto-encoders. In Proceedings of the 2013 IEEE Conference on Prognostics and Health Management (PHM), Gaithersburg, MD, USA, 24–27 June 2013; pp. 1–7. [Google Scholar]
- Le Cun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Szegedy, C.; Ioffe, S.; Vanhoucke, V.; Alemi, A. Inception-v4, Inception-Resnet In addition, The Impact of Residual Connections On Learning. arXiv 2016, arXiv:1602.07261. [Google Scholar]
- Janssens, O.; Slavkovikj, V.; Vervisch, B.; Stockman, K.; Loccufier, M.; Verstockt, S.; Van de Walle, R.; Van Hoecke, S. Convolutional neural network based fault detection for rotating machinery. J. Sound Vib. 2016, 377, 331–345. [Google Scholar] [CrossRef]
- Abdeljaber, O.; Avci, O.; Kiranyaz, S.; Gabbouj, M.; Inman, D. Real-time vibration-based structural damage detection using one-dimensional convolutional neural networks. J. Sound Vib. 2017, 388, 154–170. [Google Scholar] [CrossRef]
- Zhang, W.; Peng, G.; Li, C.; Chen, Y.; Zhang, Z. A new deep learning model for fault diagnosis with good anti-noise and domain adaptation ability on raw vibration signals. Sensors 2017, 17, 425. [Google Scholar] [CrossRef]
- Gan, M.; Wang, C. Construction of hierarchical diagnosis network based on deep learning and its application in the fault pattern recognition of rolling element bearings. Mech. Syst. Signal Process. 2016, 72, 92–104. [Google Scholar] [CrossRef]
- Li, C.; Sánchez, R.; Zurita, G.; Cerrada, M.; Cabrera, D. Fault diagnosis for rotating machinery using vibration measurement deep statistical feature learning. Sensors 2016, 16, 895. [Google Scholar] [CrossRef]
- Tang, Y. Deep Learning Using Linear Support Vector Machines. arXiv 2013, arXiv:1306.0239. [Google Scholar]
- Shen, F.; Chen, C.; Yan, R.; Gao, R. Bearing fault diagnosis based on svd feature extraction and transfer learning classification. In Proceedings of the Prognostics and System Health Management Conference (PHM), Beijing, China, 21–23 October 2015; pp. 1–6. [Google Scholar]
- Lu, W.; Liang, B.; Cheng, Y.; Meng, D.; Yang, J.; Zhang, T. Deep model based domain adaptation for fault diagnosis. IEEE Trans. Ind. Electron. 2016, 64, 2296–2305. [Google Scholar] [CrossRef]
- Amar, M.; Gondal, I.; Wilson, C. Vibration spectrum imaging: A novel bearing fault classification approach. IEEE Trans. Ind. Electron. 2015, 62, 494–502. [Google Scholar] [CrossRef]
- Combastel, C. Merging kalman filtering and zonotopic state bounding for robust fault detection under noisy environment. IFAC-PapersOnLine 2015, 48, 289–295. [Google Scholar] [CrossRef]
- Yang, B.; Lei, Y.; Jia, F.; Xing, S. An intelligent fault diagnosis approach based on transfer learning from laboratory bearings to locomotive bearings. Mech. Syst. Signal Process 2019, 122, 692–706. [Google Scholar] [CrossRef]
- Hoang, D.T.; Kang, H.J. A survey on deep learning based bearing fault diagnosis. Neurocomputing 2019, 335, 327–335. [Google Scholar] [CrossRef]
- Bently, D. Predictive maintenance through the monitoring and diagnostics of rolling element bearings. Bently Nev. Co. Appl. Note 1989, 44, 2–8. [Google Scholar]
- Yin, S.; Li, X.; Gao, H.; Kaynak, O. Data-based techniques focused on modern industry: An overview. IEEE Trans. Ind. Electron. 2015, 62, 657–667. [Google Scholar] [CrossRef]
- Dai, X.; Gao, Z. From model, signal to knowledge: A data-driven perspective of fault detection and diagnosis. IEEE Trans. Ind. Inform. 2013, 9, 2226–2638. [Google Scholar] [CrossRef]
- Gao, Z.; Cecati, C.; Ding, S.X. A survey of fault diagnosis and fault-tolerant techniques-part II: Fault diagnosis with knowledge-based and hybrid/active approaches. IEEE Trans. Ind. Electron. 2015, 62, 3768–3774. [Google Scholar] [CrossRef]
- Liu, R.; Yang, B.; Zio, E.; Chen, X. Artificial intelligence for fault diagnosis of rotating machinery: A review. Mech. Syst. Signal Process. 2018, 108, 33–47. [Google Scholar] [CrossRef]
- Li, Y.; Wang, X.; Liu, Z.; Liang, X.; Si, S. The entropy algorithm and its variants in the fault diagnosis of rotating machinery: A review. IEEE Access 2018, 6, 66723–66741. [Google Scholar] [CrossRef]
- Wang, Y.; Xiang, J.; Markert, R.; Liang, M. Spectral kurtosis for fault detection, diagnosis and prognostics of rotating machines: A review with applications. Mech. Syst. Signal Process. 2016, 66–67, 679–698. [Google Scholar] [CrossRef]
- Li, Y.; Xu, M.; Liang, X.; Huang, W. Application of bandwidth EMD and adaptive multiscale morphology analysis for incipient fault diagnosis of rolling bearings. IEEE Trans. Ind. Electron. 2017, 64, 6506–6517. [Google Scholar] [CrossRef]
- Lei, Y.; Jia, F.; Lin, J.; Xing, S.; Ding, S.X. An intelligent fault diagnosis method using unsupervised feature learning towards mechanical big data. IEEE Trans. Ind. Electron. 2016, 63, 3137–3147. [Google Scholar] [CrossRef]
- Khan, S.; Yairi, T. A review on the application of deep learning in system health management. Mech. Syst. Signal Process. 2018, 107, 241–265. [Google Scholar] [CrossRef]
- Hu, X.; Zhang, K.; Liu, K.; Lin, X.; Dey, S.; Onori, S. Advanced fault diagnosis for lithium-ion battery systems. IEEE Ind. Electron. Mag. 2020, 14, 65–91. [Google Scholar] [CrossRef]
- Lei, Y.; Yang, B.; Jiang, X.; Jia, F.; Li, N.; Nandi, A.K. Applications of machine learning to machine fault diagnosis: A review and roadmap. Mech. Syst. Signal Process. 2020, 138, 106587. [Google Scholar] [CrossRef]
- Li, X.; Li, X.; Ma, H. Deep representation clustering-based fault diagnosis method with unsupervised data applied to rotating machinery. Mech. Syst. Signal Process. 2020, 143, 106825. [Google Scholar] [CrossRef]
- Meng, Z.; Guo, X.; Pan, Z.; Sun, D.; Liu, S. Data segmentation and augmentation methods based on raw data using deep neural networks approach for rotating machinery fault diagnosis. IEEE Access 2019, 7, 79510–79522. [Google Scholar] [CrossRef]
- Hu, T.; Tang, T.; Lin, R.; Chen, M.; Han, S.; Wu, J. A simple data aug- mentation algorithm and a self-adaptive convolutional architecture for few-shot fault diagnosis under different working conditions. Measurement 2020, 156, 107539. [Google Scholar] [CrossRef]
- Zhao, D.; Liu, S.; Gu, D.; Sun, X.; Wang, L.; Wei, Y.; Zhang, H. Enhanced data-driven fault diagnosis for machines with small and unbalanced data based on variational auto-encoder. Meas. Sci. Technol. 2019, 31, 035004. [Google Scholar] [CrossRef]
- Ding, Y.; Ma, L.; Ma, J.; Wang, C.; Lu, C. A generative adversarial network based intelligent fault diagnosis method for rotating machinery under small sample size conditions. IEEE Access 2019, 7, 149736–149749. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, J.; Wang, Y. An intelligent diagnosis scheme based on generative adversarial learning deep neural networks and its application to planetary gearbox fault pattern recognition. Neurocomputing 2018, 310, 213–222. [Google Scholar] [CrossRef]
- Liu, J.; Qu, F.; Hong, X.; Zhang, H. A small-sample wind turbine fault de- tection method with synthetic fault data using generative adversarial nets. IEEE Trans. Ind. Inform. 2019, 15, 3877–3888. [Google Scholar] [CrossRef]
- Xiao, D.; Huang, Y.; Qin, C.; Liu, Z.; Li, Y.; Liu, C. Transfer learning with convolutional neural networks for small sample size problem in machinery fault diagnosis. Proc. Inst. Mech. Eng. C 2019, 233, 5131–5143. [Google Scholar] [CrossRef]
- Kim, H.; Youn, B.D. A New parameter repurposing method for parameter transfer with small dataset and its application in fault diagnosis of rolling element bearings. IEEE Access 2019, 7, 46917–46930. [Google Scholar] [CrossRef]
- Cao, P.; Zhang, S.; Tang, J. Preprocessing-free gear fault diagnosis using small datasets with deep convolutional neural network-based transfer learning. IEEE Access 2018, 6, 26241–26253. [Google Scholar] [CrossRef]
- Yu, C.; Ning, Y.; Qin, Y.; Su, W.; Zhao, X. Multi-label fault diagnosis of rolling bearing based on meta-learning. Neural. Comput. Appl. 2020, 33, 5393–5407. [Google Scholar] [CrossRef]
- Wang, S.; Wang, D.; Kong, D.; Wang, J.; Li, W.; Zhou, S. Few-shot rolling bearing fault diagnosis with metric-based meta learning. Sensors 2020, 20, 6437. [Google Scholar] [CrossRef] [PubMed]
- Wu, J.; Zhao, Z.; Sun, C.; Yan, R.; Chen, X. Few-shot transfer learning for intelligent fault diagnosis of machine. Measurement 2020, 166, 108202. [Google Scholar] [CrossRef]
- Plakias, S.; Boutalis, Y.S. Fault detection and identification of rolling element bearings with Attentive Dense CNN. Neurocomputing 2020, 405, 208–217. [Google Scholar] [CrossRef]
- Mishra, C.; Samantaray, A.K.; Chakraborty, G. Ball bearing defect models: A study of simulated and experimental fault signatures. J. Sound. Vib. 2017, 400, 86–112. [Google Scholar] [CrossRef]
- Zhang, W.; Li, C.; Peng, G.; Chen, Y.; Zhang, Z. A deep convolutional neural network with new training methods for bearing fault diagnosis under noisy environments and different working loads. Mech. Syst. Signal Process. 2018, 100, 439–453. [Google Scholar] [CrossRef]
- Purbowaskito, W.; Wu, P.-Y.; Lan, C.-Y. Permanent Magnet Synchronous Motor Driving Mechanical Transmission Fault Detection and Identification: A Model-Based Diagnosis Approach. Electronics 2022, 11, 1356. [Google Scholar] [CrossRef]
- He, Y.; Tang, H.; Ren, Y.; Kumar, A. A deep multi-signal fusion adversarial model based transfer learning and residual network for axial piston pump fault diagnosis. Measurement 2022, 2022, 110889. [Google Scholar] [CrossRef]
- Im, S.-H.; Gu, B.-G. Study of Induction Motor Inter-Turn Fault Part II: Online Model-Based Fault Diagnosis Method. Energies 2022, 15, 977. [Google Scholar] [CrossRef]
- Ayas, S.; Ayas, M.S. A novel bearing fault diagnosis method using deep residual learning network. Multimed. Tools Appl. 2022, 81, 22407–22423. [Google Scholar] [CrossRef]
- Ahmad, M.; Mohd-Mokhtar, R. A Survey on Model-based Fault Detection Techniques for Linear Time-Invariant Systems with Numerical Analysis. Pertanika J. Sci. Technol. 2022, 30. [Google Scholar] [CrossRef]
- Liu, Z.; Fang, L.; Jiang, D.; Qu, R. A machine-learning based fault diagnosis method with adaptive secondary sampling for multiphase drive systems. IEEE Trans. Power Electron. 2022, 37, 8767–8772. [Google Scholar] [CrossRef]
- Koizumi, Y.; Saito, S.; Uematsu, H.; Harada, N.; Imoto, K. ToyADMOS: A dataset of miniature-machine operating sounds for anomalous sound detection. In Proceedings of the 2019 IEEE Workshop on Applications of Signal Processing to Audio and Acoustics (WASPAA), New Paltz, NY, USA, 20–23 October 2019; pp. 313–317. [Google Scholar]
- Purohit, H.; Tanabe, R.; Ichige, K.; Endo, T.; Nikaido, Y.; Suefusa, K.; Kawaguchi, Y. MIMII Dataset: Sound dataset for malfunctioning industrial machine investigation and inspection. arXiv 2019, arXiv:1909.09347. [Google Scholar]
- Harada, N.; Niizumi, D.; Takeuchi, D.; Ohishi, Y.; Yasuda, M.; Saito, S. ToyADMOS2: Another dataset of miniature-machine operating sounds for anomalous sound detection under domain shift conditions. arXiv 2021, arXiv:2106.02369. [Google Scholar]
- Tanabe, R.; Purohit, H.; Dohi, K.; Endo, T.; Nikaido, Y.; Nakamura, T.; Kawaguchi, Y. MIMII DUE: Sound dataset for malfunctioning industrial machine investigation and inspection with domain shifts due to changes in operational and environmental conditions. In Proceedings of the 2021 IEEE Workshop on Applications of Signal Processing to Audio and Acoustics (WASPAA), New Paltz, NY, USA, 17–20 October 2021; pp. 21–25. [Google Scholar]
- Qiu, H.; Lee, J.; Lin, J. Wavelet Filter-based Weak Signature Detection Method and its Application on Roller Bearing Prognostics. J. Sound Vib. 2006, 289, 1066–1090. [Google Scholar] [CrossRef]
- Rezaee, K.; Savarkar, S.; Yu, X.; Zhang, J. A hybrid deep transfer learning-based approach for Parkinson’s disease classification in surface electromyography signals. Biomed. Signal Process. Control 2022, 71, 103161. [Google Scholar] [CrossRef]
- Chen, S.; Ge, H.; Li, H.; Sun, Y.; Qian, X. Hierarchical deep convolution neural networks based on transfer learning for transformer rectifier unit fault diagnosis. Measurement 2021, 167, 108257. [Google Scholar] [CrossRef]
- Qian, Q.; Qin, Y.; Wang, Y.; Liu, F. A new deep transfer learning network based on convolutional auto-encoder for mechanical fault diagnosis. Measurement 2021, 178, 109352. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, Q.; Li, X.; Li, G.; Liu, Z.; Xie, Y.; Li, K.; Liu, B. Transfer learning-based strategies for fault diagnosis in building energy systems. Energy Build. 2021, 250, 111256. [Google Scholar] [CrossRef]
- Li, Y.; Jiang, W.; Zhang, G.; Shu, L. Wind turbine fault diagnosis based on transfer learning and convolutional autoencoder with small-scale data. Renew. Energy 2021, 171, 103–115. [Google Scholar] [CrossRef]
- Han, T.; Liu, C.; Wu, R.; Jiang, D. Deep transfer learning with limited data for machinery fault diagnosis. Appl. Soft Comput. 2021, 103, 107150. [Google Scholar] [CrossRef]
- Li, X.; Zhang, W.; Ma, H.; Luo, Z.; Li, X. Partial transfer learning in machinery cross-domain fault diagnostics using class-weighted adversarial networks. Neural Networks 2020, 129, 313–322. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Zhang, S.; Qin, Y.; Estupinan, E. A systematic review of deep transfer learning for machinery fault diagnosis. Neurocomputing 2020, 407, 121–135. [Google Scholar] [CrossRef]
- Qian, W.; Li, S.; Yi, P.; Zhang, K. A novel transfer learning method for robust fault diagnosis of rotating machines under variable working conditions. Measurement 2019, 138, 514–525. [Google Scholar] [CrossRef]
- Hasan, M.J.; Islam, M.; Kim, J.-M. Acoustic spectral imaging and transfer learning for reliable bearing fault diagnosis under variable speed conditions. Measurement 2019, 138, 620–631. [Google Scholar] [CrossRef]
- Zhao, Z.; Zhang, Q.; Yu, X.; Sun, C.; Wang, S.; Yan, R.; Chen, X. Applications of unsupervised deep transfer learning to intelligent fault diagnosis: A survey and comparative study. IEEE Trans. Instrum. Meas. 2021, 70, 1–28. [Google Scholar] [CrossRef]
- Xu, Y.; Sun, Y.; Liu, X.; Zheng, Y. A digital-twin-assisted fault diagnosis using deep transfer learning. IEEE Access 2019, 7, 19990–19999. [Google Scholar] [CrossRef]
- Yang, B.; Lei, Y.; Jia, F.; Li, N.; Du, Z. A polynomial kernel induced distance metric to improve deep transfer learning for fault diagnosis of machines. IEEE Trans. Ind. Electron. 2019, 67, 9747–9757. [Google Scholar] [CrossRef]
- Baraldi, P.; Cannarile, F.; Di Maio, F.; Zio, E. Hierarchical k-nearest neighbours classification and binary differential evolution for fault diagnostics of automotive bearings operating under variable conditions. Eng. Appl. Artif. Intell. 2016, 56, 1–13. [Google Scholar] [CrossRef]
- Jia, F.; Lei, Y.; Guo, L.; Lin, J.; Xing, S. A neural network constructed by deep learning technique and its application to intelligent fault diagnosis of machines. Neurocomputing 2018, 272, 619–628. [Google Scholar] [CrossRef]
- Pons-Llinares, J.; Antonino-Daviu, J.A.; Riera-Guasp, M.; Lee, S.B.; Kang, T.-J.; Yang, C. Advanced induction motor rotor fault diagnosis via continuous and discrete time–frequency tools. IEEE Trans. Ind. Electron. 2014, 62, 1791–1802. [Google Scholar] [CrossRef]
- Wen, L.; Li, X.; Gao, L.; Zhang, Y. A new convolutional neural network-based data-driven fault diagnosis method. IEEE Trans. Ind. Electron. 2017, 65, 5990–5998. [Google Scholar] [CrossRef]
- Xia, M.; Li, T.; Xu, L.; Liu, L.; De Silva, C.W. Fault diagnosis for rotating machinery using multiple sensors and convolutional neural networks. IEEE/ASME Trans. Mechatronics 2017, 23, 101–110. [Google Scholar] [CrossRef]
- Guo, L.; Lei, Y.; Xing, S.; Yan, T.; Li, N. Deep convolutional transfer learning network: A new method for intelligent fault diagnosis of machines with unlabeled data. IEEE Transactions on Industrial Electronics 2018, 66, 7316–7325. [Google Scholar] [CrossRef]
- Wen, L.; Gao, L.; Li, X. A new deep transfer learning based on sparse auto-encoder for fault diagnosis. IEEE Transactions on systems, man, and cybernetics: Systems 2017, 49, 136–144. [Google Scholar] [CrossRef]
- Eren, L. Bearing fault detection by one-dimensional convolutional neural networks. Math. Probl. Eng. 2017, 2017, 1–9. [Google Scholar] [CrossRef]
- Chen, Z.; Mauricio, A.; Li, W.; Gryllias, K. A deep learning method for bearing fault diagnosis based on cyclic spectral coherence and convolutional neural networks. Mechanical Systems and Signal Processing 2020, 140, 106683. [Google Scholar] [CrossRef]
- Xu, Y.; Li, Z.; Wang, S.; Li, W. Thompson Sarkodie-Gyan, and Shizhe Feng. A hybrid deep-learning model for fault diagnosis of rolling bearings. Measurement 2021, 169, 108502. [Google Scholar] [CrossRef]
- Khorram, A.; Khalooei, M.; Rezghi, M. End-to-end CNN+ LSTM deep learning approach for bearing fault diagnosis. Appl. Intell. 2021, 51, 736–751. [Google Scholar] [CrossRef]
- Venables, W.N.; Ripley, B.D. Modern Applied Statistics with S-PLUS; Springer Science& Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Kankar, P.K.; Sharma, S.; Harsha, S.P. Fault diagnosis of ball bearings using machine learning methods. Expert Syst. Appl. 2011, 38, 1876–1886. [Google Scholar] [CrossRef]
- Cerrada, M.; Zurita, G.; Cabrera, D.; Sánchez, R.V.; Artés, M.; Li, C. Fault diagnosis in spur gears based on genetic algorithm and random forest. Mech. Syst. Signal Process. 2016, 70, 87–103. [Google Scholar] [CrossRef]
- Widodo, A.; Yang, B.-S. Support vector machine in machine condition monitoring and fault diagnosis. Mech. Syst. Signal Process. 2007, 21, 2560–2574. [Google Scholar] [CrossRef]
- Tong, C.; Wang, S.; Selesnick, I.; Yan, R.; Chen, X. Ridge-aware weighted sparse time-frequency representation. IEEE Trans. Signal Process. 2020, 69, 136–149. [Google Scholar] [CrossRef]
- Min, S.; Lee, B.; Yoon, S. Deep learning in bioinformatics. Briefings Bioinform. 2017, 18, 851–869. [Google Scholar] [CrossRef] [PubMed]
- Krizhevsky, A.; Sutskever, I.; Hinton, G. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 60, 1097–1105. [Google Scholar] [CrossRef]
- Li, X.; Zhang, W.; Ding, Q.; Sun, J.-Q. Multi-layer domain adaptation method for rolling bearing fault diagnosis. Signal Process. 2019, 157, 180–197. [Google Scholar] [CrossRef]
- Zhang, R.; Tao, H.; Wu, L.; Guan, Y. Transfer learning with neural networks for bearing fault diagnosis in changing working conditions. IEEE Access 2017, 5, 14347–14357. [Google Scholar] [CrossRef]
- Zhang, C.; Xu, L.; Li, X.; Wang, H. A method of fault diagnosis for rotary equipment based on deep learning. In Proceedings of the 2018 Prognostics and System Health Management Conference (PHMChongqing), Chongqing, China, 26–28 October 2018; pp. 958–962. [Google Scholar]
- Chen, D.; Yang, S.; Zhou, F. Incipient fault diagnosis based on dnn with transfer learning. In Proceedings of the 2018 International Conference on Control, Automation and Information Sciences (ICCAIS), Hangzhou, China, 24–27 October 2018; pp. 303–308. [Google Scholar]
- Golafshan, R.; Sanliturk, K.Y. SVD and Hankel matrix based de-noising approach for ball bearing fault detection and its assessment using artificial faults. Mech. Syst. Signal Process. 2016, 70, 36–50. [Google Scholar] [CrossRef]
- Ho, R.; Hung, K. A comparative investigation of mode mixing in EEG decomposition using EMD, EEMD and M-EMD. In Proceedings of the 2020 IEEE 10th Symposium on Computer Applications & Industrial Electronics (ISCAIE), Penang, Malaysia, 18–19 April 2020; pp. 203–210. [Google Scholar]
- Zabin, M.; Choi, H.J.; Uddin, J. Hybrid deep transfer learning architecture for industrial fault diagnosis using Hilbert transform and DCNN–LSTM. J. Supercomput. 2022, 2022, 1–20. [Google Scholar] [CrossRef]
- Islam, R.; Uddin, J.; Kim, J.M. Texture analysis based feature extraction using Gabor filter and SVD for reliable fault diagnosis of an induction motor. Int. J. Inf. Technol. Manag. 2018, 17, 20–32. [Google Scholar] [CrossRef]
- Uddin, J.; Islam, M.R.; Kim, J.M.; Kim, C.H. A two-dimensional fault diagnosis model of induction motors using a gabor filter on segmented images. Int. J. Control. Autom. 2016, 9, 11–22. [Google Scholar] [CrossRef]
- Uddin, J.; Van, D.N.; Kim, J.M. Accelerating 2D Fault Diagnosis of an Induction Motor using a Graphics Processing Unit. Int. J. Multimed. Ubiquitous Eng. 2015, 10, 341–352. [Google Scholar] [CrossRef]
- Uddin, J.; Nguyen, D.; Kim, J. A reliable fault detection and classification model of induction motors using texture features and multi-class support vector machines. J. Math. Probl. Eng. 2014, 2014, 1–9. [Google Scholar]
- Uddin, J.; Islam, R.; Kim, J.M. Texture feature extraction techniques for fault diagnosis of induction motors. JoC 2014, 5, 15–20. [Google Scholar]


{kind=link}
| Short Form | Full Form |
|---|---|
| DTL | Deep Transfer |
| DL | Deep Learning |
| IFD | Intelligent Fault Diagnosis |
| DNN | Deep Neural Network |
| AE | Acoustic Emission |
| CNN | Convolutional Neural Network |
| HB | Health Bearing |
| SVM | Supporting Vector Machine |
| ANN | Artificial Neural Network |
| KNN | K-Nearest Neighbor |
| SK | Spectrum Kurtosis |
| EMD | Empirical Mode Decomposition |
| RMB | Restricted Boltzmann Machines |
| GAN | Generative Adversarial Networks |
| FDD | Feature-Driven Development |
| ASI | Acoustic Spectrum Imaging |
| Objectives and Challenges | Method | Dataset |
|---|---|---|
| Dynamic model of bearings was used to apply the diagnostic information from the simulation data to a real situation [2]. | Intelligent fault diagnosis, Transfer learning, Dynamic model and Convolutional neural network | CWRU data and MFPT data |
| Transforming deep learning models into transfer learning approaches begins with a quick overview of the theoretical foundations of DTL. Following that, we go through some of the most important DTL applications and the most current DTL improvements in IFD [3]. | Fault diagnosis, Deep learning, Transfer learning, Domain adaptation, Deep transfer learning | MIMII |
| A multi-source transfer learning network (MSTLN) structure is proposed in this study to aggregate and transmit diagnostic information from many sources. A multi-source diagnostic knowledge fusion module is used in conjunction with many partial distribution adaption sub-networks (PDA-Subnets) [4]. | Intelligent fault diagnosis, Rotating machines, Multi-source transfer learning and Deep transfer learning | Bearing datasets, Planetary gearbox datasets |
| Using a reinforcement ensemble deep transfer learning network for defect detection with numerous sources is recommended (REDTLN) [74]. | Multi-source domains and Reinforcement ensemble deep transfer network | Bearing dataset |
| This paper’s primary objective was to use pre-trained deep transfer learning (DTL) structures and standard machine learning (ML) models as an automated method for diagnosing Parkinson’s disease (PD) using sEMG data [2]. | Deep transfer learning and Ensembling feature selection | Prosthetic fingers and Gait rhythmicity datasets. |
| This study explains the design process of the built-in discrete time-series convolution neural network (DTCNN) and provides a hierarchical technique for TRUs fault detection as well as a transfer learning-based fault diagnostic method rather than training new models for distinct TRUs [76]. | Transformer rectifier units, Intelligent fault diagnosis, Convolutional neural network and Transfer learning. | Asy-24 and Sy-24. |
| Researchers are employing transfer learning to identify faults due to a shortage of fault data. This paper investigates the advantages of transfer learning for AI-based fault-detection problems [77]. | Fault diagnosis, feature extraction, feature transfer and sensors. | Two data sets, denoted Group A and Group B, are used in the comparative experiments. Group A depicts the transition of the Hp1 fault prediction model to Hp2. Group B reflects the transition of the Hp3 fault prediction model to Hp4. |
| This approach can be immediately applied to transient data while preserving accuracy without the need for a steady-state detector, allowing for early defect diagnosis. The transformer design employs a new multi-head attention mechanism devoid of convolutional and recurrent layers, as is the case with standard deep learning techniques [78]. | Transformer architecture and Deep learning method | N/A. |
| By assessing the attributes of great observations from sensors put in traction systems, the typical processes, difficulties that may limit future FDD installations are analyzed in detail, as are realistic high-speed trains. Using the theoretical advancements of data-driven FDD techniques, further enlightening insights on this topic are provided. Orally generated by embracing FDD-based model-based issues. High-speed train traction system approaches for system identification and new machine learning technologies that provide a range of interesting solutions to FDD strategies [79]. | Data-driven, fault diagnosis and detection (FDD), traction systems, and high-speed trains. | N/A. |
| This study presents a domain generalization-based hybrid diagnostic network for deployment under unanticipated working settings in order to address this difficulty. Using both intrinsic and extrinsic generalization objectives, the deep network’s discriminant structure is intended to be made more regular. This allows the diagnostic model to acquire robust traits and then apply them to previously unexplored areas [80]. | Keywords: deep learning, domain generalization, intelligent failure detection, rotating equipment, and vibration signals. and a record of problems with the gearbox. | N/A. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bhuiyan, M.R.; Uddin, J. Deep Transfer Learning Models for Industrial Fault Diagnosis Using Vibration and Acoustic Sensors Data: A Review. Vibration 2023, 6, 218-238. https://doi.org/10.3390/vibration6010014
Bhuiyan MR, Uddin J. Deep Transfer Learning Models for Industrial Fault Diagnosis Using Vibration and Acoustic Sensors Data: A Review. Vibration. 2023; 6(1):218-238. https://doi.org/10.3390/vibration6010014
Chicago/Turabian StyleBhuiyan, Md Roman, and Jia Uddin. 2023. "Deep Transfer Learning Models for Industrial Fault Diagnosis Using Vibration and Acoustic Sensors Data: A Review" Vibration 6, no. 1: 218-238. https://doi.org/10.3390/vibration6010014
APA StyleBhuiyan, M. R., & Uddin, J. (2023). Deep Transfer Learning Models for Industrial Fault Diagnosis Using Vibration and Acoustic Sensors Data: A Review. Vibration, 6(1), 218-238. https://doi.org/10.3390/vibration6010014