
Dual-GRU Perception Accumulation Model for Linear Beam Smoke Detector

Abstract
1. Introduction
- (1)
- Experimental platform construction and wavelength screening. A long-optical-path smoke attenuation experiment platform was designed and constructed. Through systematic experimental research, the beam wavelengths suitable for linear beam smoke detectors were obtained, laying a foundation for improving the detection performance of detectors.
- (2)
- Deep learning algorithm design. Based on the deep learning technology, an innovative algorithm suitable for linear beam smoke fire detectors was designed; by comprehensively considering the temporal characteristics of data from two different wavelength sensors and multiple discriminations, the detector’s ability to process fire signals and recognition accuracy have been effectively improved.
- (3)
- Algorithm comparison and verification. Comprehensive comparative experiments were carried out between the designed algorithm and traditional fire signal-processing algorithms. The experimental results fully demonstrate the significant advantages and effectiveness of the algorithm in this paper in terms of detection accuracy and anti-interference ability.
2. Related Works
2.1. Development of Fire Detection Signal Processing Algorithms
2.2. Artificial Intelligence Signal Processing Methods
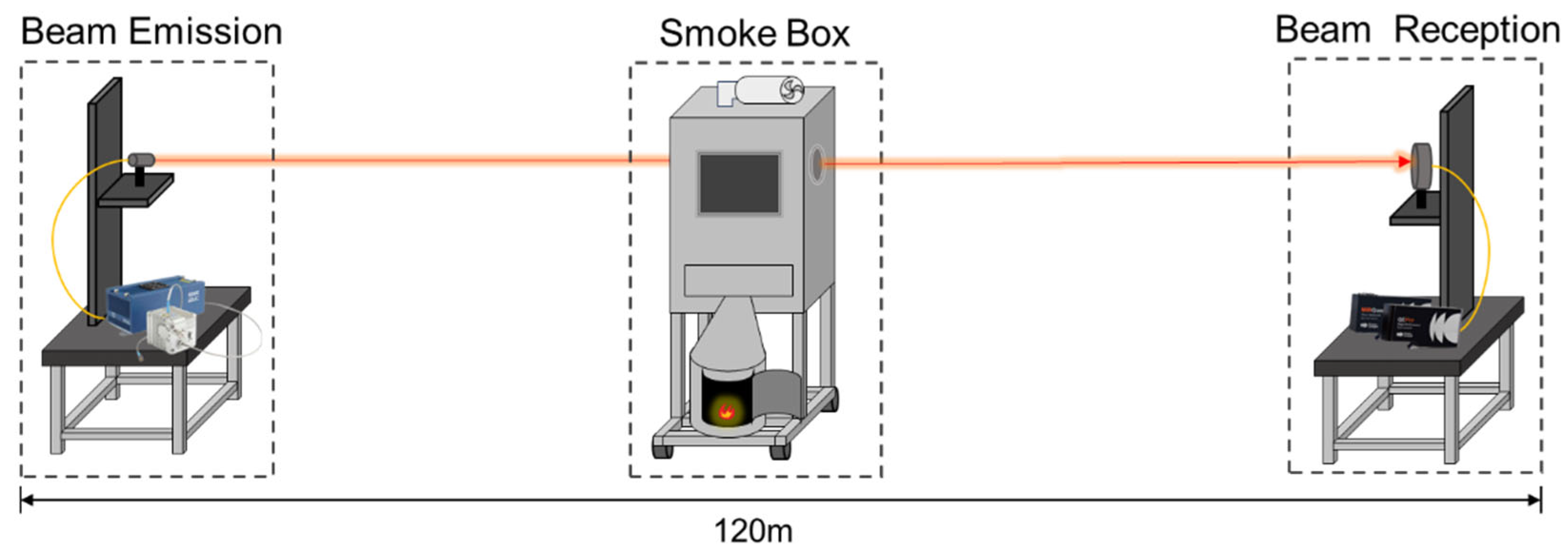
3. Platform Construction
3.1. Beam Emission Part
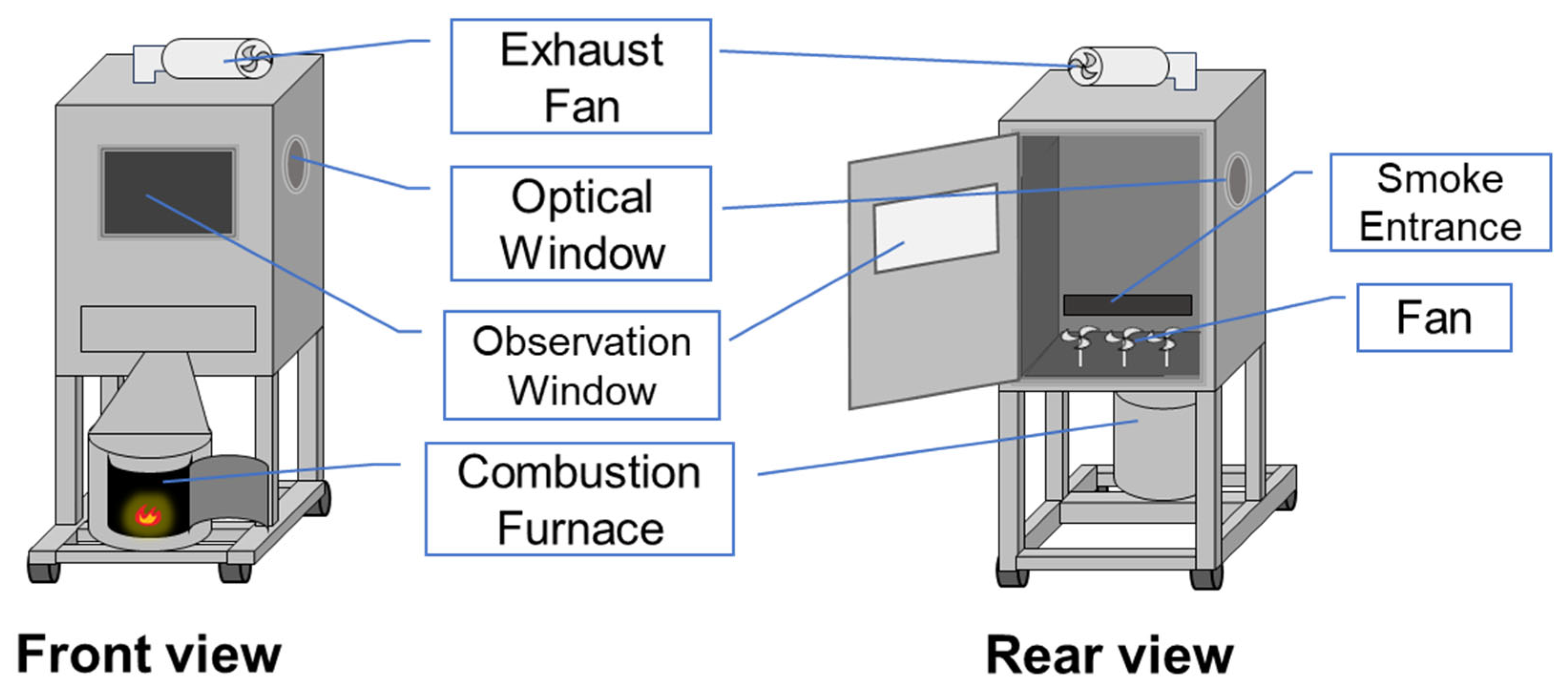
3.2. Smoke Box Part
3.3. Beam Reception Part
3.4. Data Collection
3.5. Data Preprocessing
3.6. Data Analysis
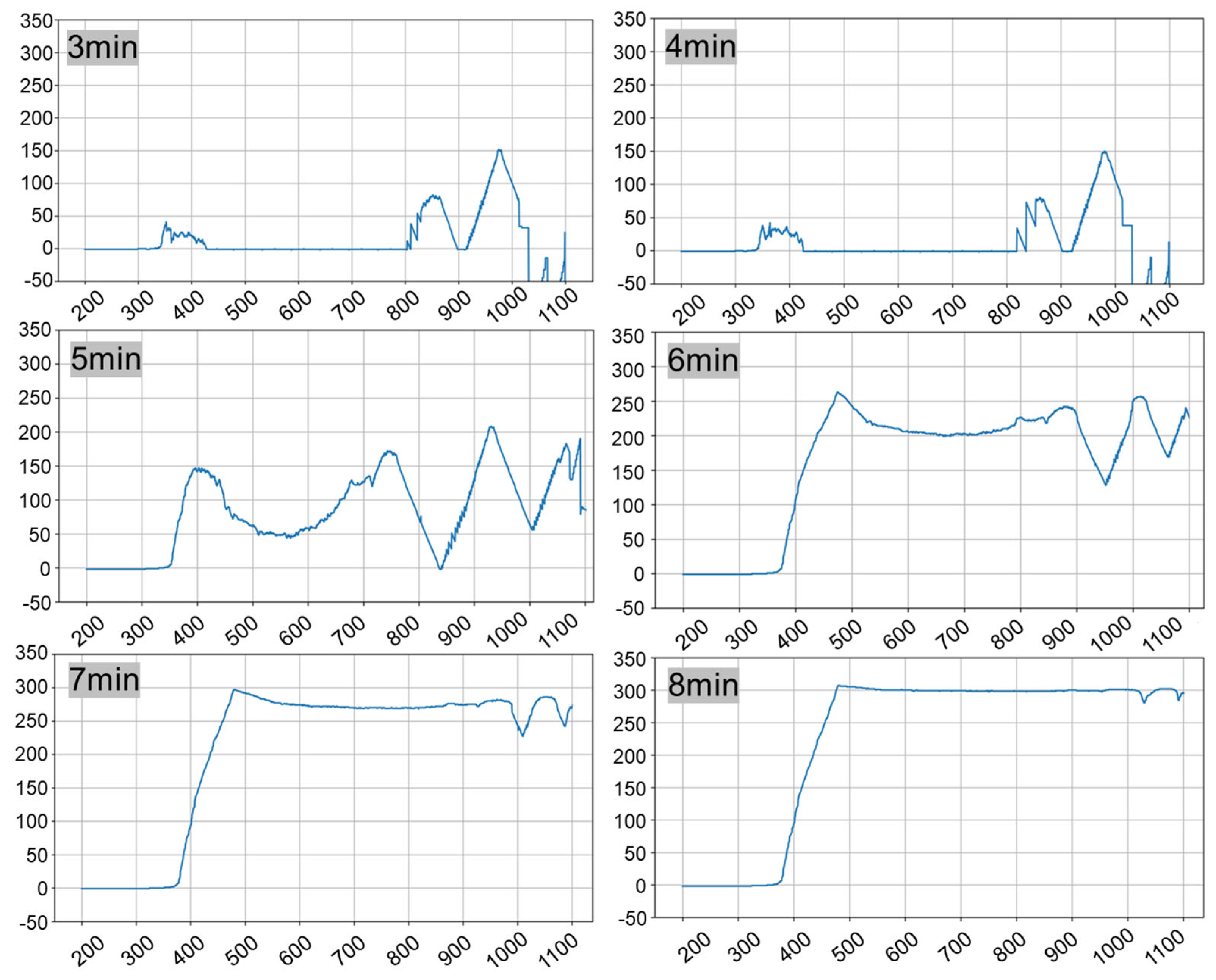
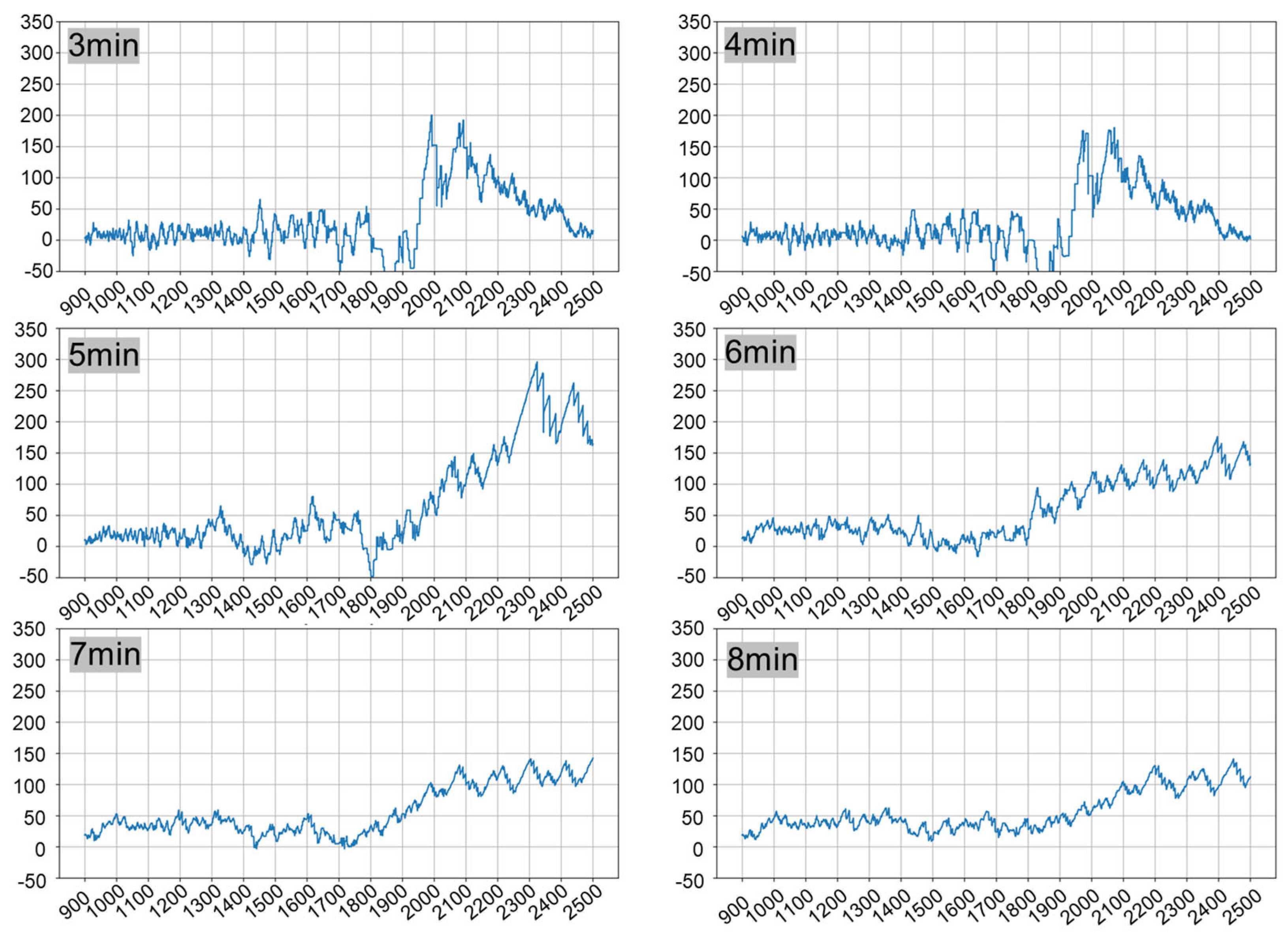
3.7. Smoke Dimming and Interference Experiment: 405 nm and 850 nm
3.8. Dataset Preparation
3.8.1. Data Collection Scenario Design
- Fire smoke scenario is a scenario where cotton ropes and wooden blocks are smoldering to produce smoke;
- Typical interference scenarios include water vapor and vibrational displacements;
- Normal state scenario is a pure environment without smoke and interference.
3.8.2. Data Processing
4. Algorithm Design
4.1. Input Dataset Preprocess
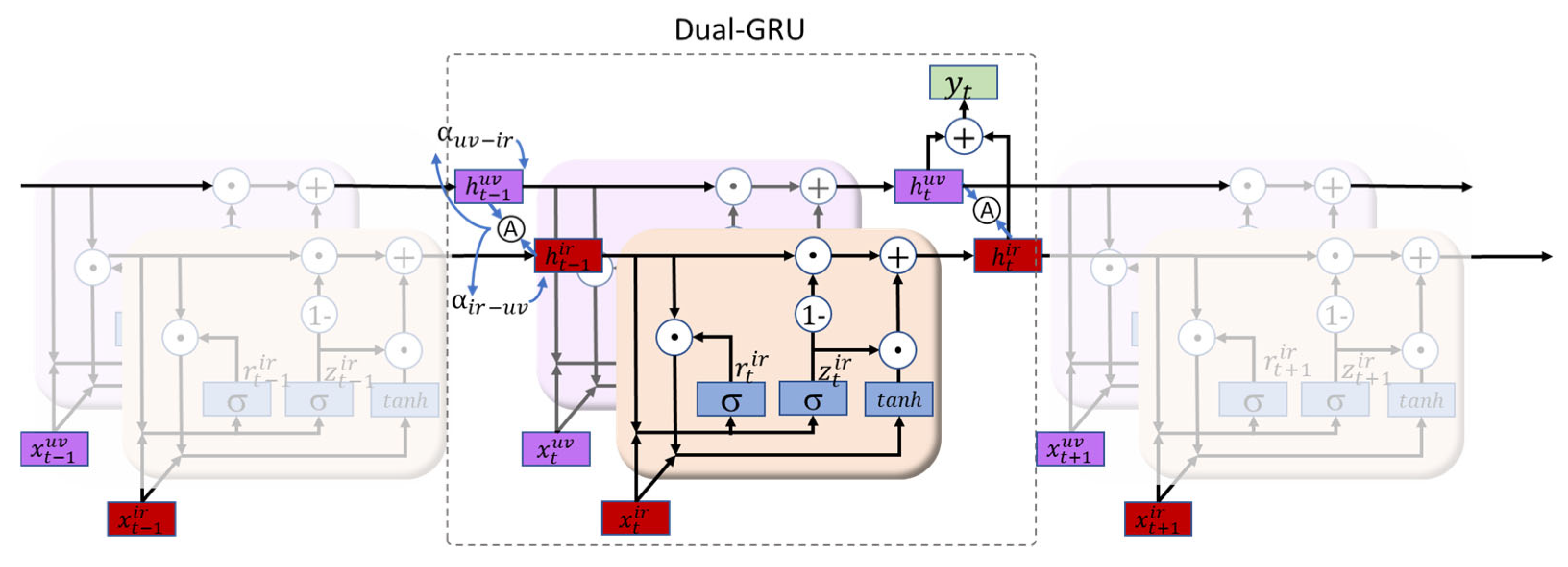
4.2. Improved GRU Neural Network Structure
4.3. Loss Function
4.4. Model Training
4.4.1. Learning Rate Schedule
4.4.2. Regularization Parameters
4.4.3. Batch Size Impact
4.4.4. Early Stopping Criteria
- Learning rate: 10−3;
- Batch size: 16;
- Weight decay: 10−4;
- GRU hidden layer size: 64.
5. Experiment and Analysis
5.1. Comparison Algorithms
- B1: fixed-threshold algorithm: this is a simple and intuitive fire signal processing algorithm. It sets a fixed threshold for the light intensity change of the detector. When the light intensity change exceeds this threshold, a fire alarm is issued. Although this algorithm is easy to implement, it is highly susceptible to environmental interference and has a high false alarm rate.Specifically, assuming the received signal strength is and the alarm threshold is , whenit is considered that a fire has occurred.
- B2: trend algorithm: it analyzes the change trend of the detector’s light intensity signal over time. By calculating the slope of the signal curve, it determines whether there is a fire. If the slope exceeds a certain value, it is considered that a fire may occur. However, this algorithm is less sensitive to slow-developing fires and may have a high missed alarm rate.Specifically, assuming is the received signal strength at time and the alarm threshold is , the formula for calculating is as follows:where is the length of the time interval used to calculate the trend. When the preset trend threshold is reached, an alarm is triggered. Whenit is considered that a fire has occurred.
- B3: slope algorithm: similar to the trend algorithm, it focuses on the rate of change of the light intensity signal. It calculates the slope of the signal within a specific time window. When the slope reaches a predefined value, a fire alarm is triggered. This algorithm can quickly detect rapidly developing fires but may also generate false alarms due to sudden environmental changes.Specifically, for a set of received signal strength data , assuming the time point is , fit the line using the least squares method, where the formula for calculating the slope a is as follows:whereWhenit is considered that a fire has occurred.
- B4: duration algorithm: it determines whether there is a fire by analyzing the duration of the detector’s light intensity signal exceeding a certain threshold. If the signal remains above the threshold for a specified time, a fire alarm is issued. This algorithm can reduce false alarms caused by short-term interference but may delay the alarm for fast-spreading fires.Specifically, assuming the received signal strength is , the alarm threshold is , and the duration is , the alarm threshold is , and the time threshold is , whenstart timing. If the signal strength remains above the threshold, the duration accumulates continuously. Whenit is considered that a fire has occurred.
- B5: BP neural network algorithm: the BP (backpropagation) neural network is a classic artificial neural network algorithm. It can learn the complex mapping relationship between input signals and output labels through training. In the field of fire detection, the BP neural network can use the light intensity data of the detector as input and output the fire judgment result. However, the BP neural network is prone to overfitting problems and has a relatively long training time.
5.2. Experimental Setup
- TP (true positive) is the correct number of alarm samples;
- TN (true negative) is the correct number of non-alarm samples;
- FP (false positive) refers to the number of false-positive samples;
- FN (false negative) refers to the number of missed samples.
5.3. Experimental Results and Analysis
5.4. Ablation Experiments
- B6: single-wavelength model: a model using only infrared light intensity data was established. The experimental results show that the accuracy of the single-wavelength model is significantly lower than that of the dual-wavelength model, and the false alarm rate and the missed alarm rate are higher. This indicates that the dual-wavelength information fusion can provide more comprehensive feature information and improve the performance of the model.
- B7: GRU model without the cross-attention mechanism: the experimental results show that the performance of this model is also inferior to that of the improved GRU model with the cross-attention mechanism. This shows that the cross-attention mechanism can effectively enhance the interaction between red and ultraviolet information, enabling the model to better capture the characteristic changes of smoke at different wavelengths.
6. Conclusions
- Experimental platform and wavelength screening. By establishing a 120 m large-scale experimental platform for investigating smoke spectral characteristics, a systematic analysis was conducted on the attenuation of light intensity by smoke particles within the 200–2500 nm wavelength range. The experimental findings revealed that the 405 nm ultraviolet band and the 850 nm near-infrared band exhibit heightened sensitivity to fluctuations in smoke concentration. The integration of these two bands can complementarily capture signal characteristics throughout the entire fire development cycle. This discovery provides a robust experimental foundation for the wavelength selection of linear beam detectors, effectively addressing the issue of inadequate resilience to complex interferences inherent in traditional single-wavelength detection methods.
- Innovation and efficacy of the dual-GRU algorithm. The proposed improved gated recurrent unit (GRU) algorithm constructs a dual-input channel structure and incorporates the cross-attention mechanism, thereby enabling the fusion of temporal signals and dynamic interaction of features between 405 nm ultraviolet light and 850 nm near-infrared light. This fundamentally overcomes the limitations of traditional algorithms that rely on a single wavelength or fixed rules. Leveraging dual-wavelength information, the algorithm synergistically perceives the microscale particle scattering (through the UV channel) and the macroscale concentration changes (through the near-infrared channel) of smoke. In combination with the attention mechanism, it dynamically focuses on key features. As a result, it demonstrates superior performance compared to the other algorithms in the core indicators such as detection accuracy (96.8%), false alarm rate (2.1%), missed alarm rate (1.5%), and alarm response time (6.7 s).
- Practical application value and technological breakthroughs. The research findings effectively capture the multidimensional characteristics of the full-cycle smoke development via data-driven deep modeling. They can accurately discriminate the temporal disparities between fire signals and environmental interferences, circumvent the one-sidedness of traditional threshold-based algorithms, and address the issue of inadequate adaptability of single-feature analysis in complex scenarios. This study offers a highly efficient and robust solution for the reliable operation of linear beam smoke detectors in high-rise space buildings, thereby demonstrating significant technological breakthroughs and practical value in modern fire safety applications.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| GRU | Gated recurrent unit |
| LSTM | Long short-term memory |
| RNN | Recurrent neural network |
| GPU | Graphical processing unit |
| BP | Backpropagation |
| SD | Standard deviation |
Appendix A
References
- Fireray One Auto-Aligning Beam Detector. Available online: https://www.pottersignal.com/conventional-fire-alarm/beam-detectors/fireray-beam-detector (accessed on 2 May 2025).
- Linear Smoke Detector LRMX. Available online: https://www.esser-systems.com/en/products/details/detectors-for-special-applications/linear-smoke-detectors/76140010-linear-smoke-detector-lrmx/ (accessed on 2 May 2025).
- Model 6424 Projected Beam Smoke Detector. Available online: https://prod-edam.honeywell.com/content/dam/honeywell-edam/hbt/en-us/documents/literature-and-specs/datasheets/6424_DataSheet_A05-02171.pdf (accessed on 6 May 2025).
- PROJECTED BEAM TYPE SMOKE DETECTOR FDGJ SERIES. Available online: https://koueitrading.com/global/product/nohmi-bosai-fdgj-series-projected-beam-type-smoke-detector/ (accessed on 3 May 2025).
- OSID Imager Beam Smoke Detector. Available online: https://buildings.honeywell.com/us/en/products/by-category/fire-life-safety/sensors-and-detectors/beam-detectors/osid-imager-beam-smoke-detector (accessed on 5 May 2025).
- Ge, J.; Yu, Z. Research on double discrimination imaging smoke detection technology for high space areas in subway. Fire Sci. Technol. 2023, 42, 1714–1718. [Google Scholar]
- Luck, H.O. Dedicated detection algorithms for automatic fire detection. In Proceedings of the 3rd Intemational Symposium on Fire Safety Science, Edinburgh, UK, 8–12 July 1991; Drysdale, D.D., Ed.; Elsevier Applied Science Publishers: London, UK, 1991; pp. 135–148. [Google Scholar]
- Tomkewitsch, R. Fire detection systems with “distributed Intelligence” the puls pollingsystem. Fire Saf. J. 1993, 9, 225–231. [Google Scholar] [CrossRef]
- Wang, S.; Dou, Z. Exclusive trend detector with variable observation windows for signal detection. Electron. Lett. 1997, 33, 1433–1435. [Google Scholar] [CrossRef]
- Okayama, Y. A primitive study of a fire detection method controlled by artificial neural net. Fire Saf. J. 1991, 17, 535–553. [Google Scholar] [CrossRef]
- Nakanishi, S.; Nomura, J.; Kurio, T.; Kaneda, M. Intelligent fire warning system using fuzzy technology. In Proceedings of the 10th Internationale Konferenz ueber Automatische Brandentdeckung, Duisburg, Germany, 5 April 1995; Luck, H., Ed.; AUBE’95. pp. 203–212. [Google Scholar]
- Liu, G.; Yuan, H.; Huang, L.D. A fire alarm judgment method using multiple smoke alarms based on Bayesian estimation. Fire Saf. J. 2023, 136, 103733. [Google Scholar] [CrossRef]
- Hulst, H.C.; Van De Hulst, H.C. Light Scattering by Small Particles; Dover Publications, Inc.: New York, NY, USA, 1981. [Google Scholar]
- Li, K.; Liu, G.; Yuan, H.; Chen, Y.; Dai, Y.; Meng, X.; Kang, Y.; Huang, L. Dual-Wavelength Smoke Detector Measuring Both Light Scattering and Extinction to Reduce False Alarms. Fire 2023, 6, 140. [Google Scholar] [CrossRef]
- Xia, J.; Zeng, J.; Zhou, Y. Dual-wavelength optical sensor for fire detection and measurement of aerosol mass concentration. Fire Saf. J. 2024, 146, 104129. [Google Scholar] [CrossRef]
- Węgrzyński, W.; Antosiewicz, P.; Fangrat, J. Multi-Wavelength Densitometer for Experimental Research on the Optical Characteristics of Smoke Layers. Fire Technol. 2021, 57, 2683–2706. [Google Scholar] [CrossRef]
- Yu, M.; Yuan, H.; Li, K.; Wang, J. Research on multi-detector real-time fire alarm technology based on signal similarity. Fire Saf. J. 2023, 136, 103724. [Google Scholar] [CrossRef]
- Elman, J.L. Finding Structure in Time. Cogn. Sci. 1990, 14, 179–211. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Kyunghyun, C.; Bart, V.M.; Çaglar, G.; Dzmitry, B.; Fethi, B.; Holger, S.; Yoshua, B. Learning Phrase Representations using RNN Encoder-Decoder for Statistical Machine Translation. arXiv 2014, arXiv:1406.1078. [Google Scholar]
- ISO 7240-7:2023; Fire Detection and Alarm Systems—Part 7: Point-Type Smoke Detectors Using Scattered Light 2023. ISO: Geneva, Switzerland, 2023.
- Husain, G.; Siddiqua, A.; Toma, M. Evaluating the Performance of DenseNet in ECG Report Automation. Electronics 2025, 14, 1837. [Google Scholar] [CrossRef]
- Agbehadji, I.E.; Obagbuwa, I.C. Integration of Explainable Artificial Intelligence into Hybrid Long Short-Term Memory and Adaptive Kalman Filter for Sulfur Dioxide (SO2) Prediction in Kimberley, South Africa. Atmosphere 2025, 16, 523. [Google Scholar] [CrossRef]
- Mutawa, A.M.; Sruthi, S. A Comparative Evaluation of Transformers and Deep Learning Models for Arabic Meter Classification. Appl. Sci. 2025, 15, 4941. [Google Scholar] [CrossRef]
- Khan, J.; Ahmad, N.; Lee, Y.; Khalid, S.; Hussain, D. Hybrid Deep Neural Network with Domain Knowledge for Text Sentiment Analysis. Mathematics 2025, 13, 1456. [Google Scholar] [CrossRef]
- Sebbane, C.; Belhajem, I.; Rziza, M. Making Images Speak: Human-Inspired Image Description Generation. Information 2025, 16, 356. [Google Scholar] [CrossRef]
- Liu, B.; Xu, J.; Xi, J.; Zhao, C.; Feng, X.; Ren, C.; Shang, H. A Hybrid VMD-BO-GRU Method for Landslide Displacement Prediction in the High-Mountain Canyon Area of China. Remote Sens. 2025, 17, 1953. [Google Scholar] [CrossRef]
- Chen, B.; Liu, G. D4Care: A Deep Dynamic Memory-Driven Cross-Modal Feature Representation Network for Clinical Outcome Prediction. Appl. Sci. 2025, 15, 6054. [Google Scholar] [CrossRef]
- Adefemi, K.O.; Mutanga, M.B.; Jugoo, V. Hybrid Deep Learning Models for Predicting Student Academic Performance. Math. Comput. Appl. 2025, 30, 59. [Google Scholar] [CrossRef]
- PyTorch. Available online: https://pytorch.org/ (accessed on 2 June 2025).
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Accuracy (%) | False Alarm Rate (%) | Missed Alarm Rate (%) | Alarm Response Time (s) | Inference Time (s) |
|---|---|---|---|---|---|
| B1-low | 82.5 ± 2.8 | 11.1 ± 2.1 | 1.8 ± 1.8 | 2.6 | 0.03 |
| B1-mid | 78.1 ± 2.5 | 11.8 ± 1.9 | 1.2 ± 1.6 | 1.4 | |
| B1-high | 76.4 ± 2.2 | 5.2 ± 1.7 | 0.7 ± 1.6 | 0.3 | |
| B2-low | 86.8 ± 2.0 | 3.9 ± 1.6 | 11.2 ± 1.2 | 14.0 | 0.07 |
| B2-mid | 83.5 ± 1.8 | 4.5 ± 1.5 | 8.8 ± 1.3 | 10.2 | |
| B2-high | 79.8 ± 1.4 | 4.7 ± 1.6 | 6.1 ± 1.3 | 7.5 | |
| B3-low | 92.7 ± 1.3 | 3.5 ± 1.4 | 9.8 ± 1.5 | 13.5 | 0.09 |
| B3-mid | 90.3 ± 1.9 | 5.9 ± 1.5 | 5.4 ± 1.6 | 9.8 | |
| B3-high | 86.2 ± 1.6 | 8.8 ± 1.3 | 3.6 ± 1.4 | 6.9 | |
| B4-low | 91.2 ± 2.2 | 3.2 ± 1.4 | 10.5 ± 1.7 | 16.0 | 0.11 |
| B4-mid | 88.9 ± 1.9 | 5.3 ± 1.8 | 7.2 ± 1.3 | 12.5 | |
| B4-high | 85.5 ± 2.1 | 7.6 ± 1.2 | 4.8 ± 1.4 | 8.7 | |
| B5-low | 90.1 ± 1.7 | 3.0 ± 1.4 | 6.2 ± 1.1 | 10.0 | 0.16 |
| B5-high | 87.8 ± 1.6 | 4.5 ± 1.0 | 2.8 ± 1.2 | 8.0 | |
| Ours | 96.8 ± 0.9 | 2.1 ± 1.1 | 1.5 ± 0.8 | 6.7 | 0.21 |
| Method | Dual-Wavelength | Cross-Attention | Accuracy (%) | False Alarm Rate (%) | Missed Alarm Rate (%) | Alarm Response Time (s) | Inference Time (s) |
|---|---|---|---|---|---|---|---|
| B6 | ✗ | ✗ | 91.1 ± 1.5 | 5.5 ± 1.9 | 3.8 ± 1.7 | 5.918 | 0.16 |
| B7 | ✓ | ✗ | 92.7 ± 1.2 | 3.3 ± 0.9 | 2.7 ± 1.3 | 5.946 | 0.19 |
| Ours | ✓ | ✓ | 96.8 ± 0.9 | 2.1 ± 1.1 | 1.5 ± 0.8 | 6.725 | 0.21 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Li, B.; Wang, L.; Cao, Z.; Zhang, X. Dual-GRU Perception Accumulation Model for Linear Beam Smoke Detector. Fire 2025, 8, 229. https://doi.org/10.3390/fire8060229
Wang Z, Li B, Wang L, Cao Z, Zhang X. Dual-GRU Perception Accumulation Model for Linear Beam Smoke Detector. Fire. 2025; 8(6):229. https://doi.org/10.3390/fire8060229
Chicago/Turabian StyleWang, Zhuofu, Boning Li, Li Wang, Zhen Cao, and Xi Zhang. 2025. "Dual-GRU Perception Accumulation Model for Linear Beam Smoke Detector" Fire 8, no. 6: 229. https://doi.org/10.3390/fire8060229
APA StyleWang, Z., Li, B., Wang, L., Cao, Z., & Zhang, X. (2025). Dual-GRU Perception Accumulation Model for Linear Beam Smoke Detector. Fire, 8(6), 229. https://doi.org/10.3390/fire8060229