2. Theoretical Analysis
Up to now, experimental studies on forced spreading refer to one of two effects: either to simple tilting plates or to centrifugal devices with varying tangential force applied to a droplet lying horizontally. Hence, theoretical studies also refer to similar conditions [
4,
5,
6]. The generalized simultaneous variation of both effects requires new theoretical analysis. Earlier [
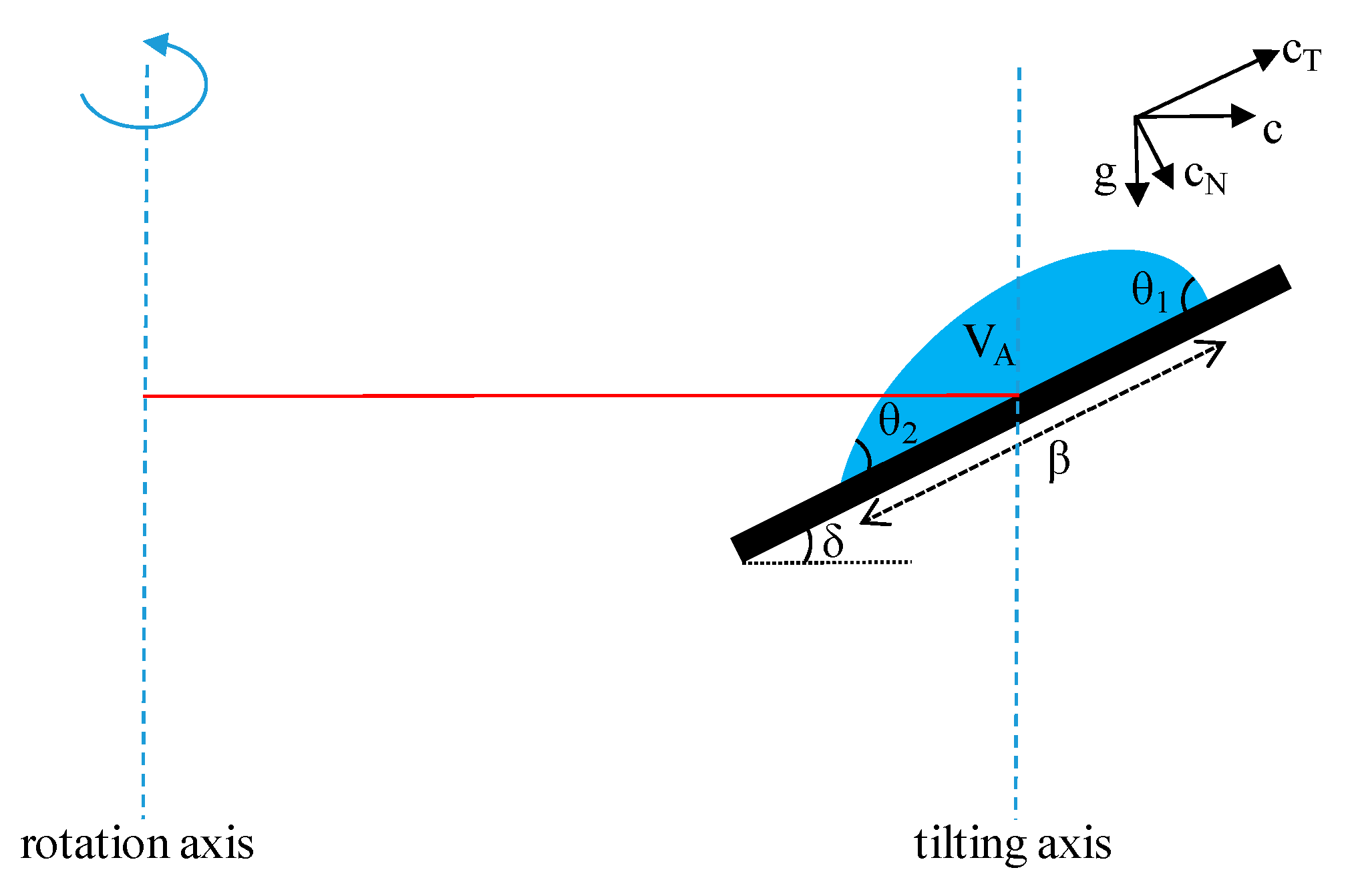
18], an oversimplified model for the drop shape was introduced. It is based on the combination of a two-dimensional (planar) geometry and linearization of the Young–Laplace equation. Such a model is expected to give only qualitative information but it has the major advantage that it permits analytical solution retaining the essential physics of the process. In that earlier work, the model has been developed and results are presented for the case of only normal or only tangential force. Here, it is expanded for arbitrary variation of both forces and results are presented for both idealized and realistic variation scenarios. The reference set up considered for the theoretical analysis consists of a droplet lying on a plate which can be rotated and tilted simultaneously, as displayed in
Figure 1. The ratio of droplet size to the distance from the rotation axis is so small that the exercised body force can be assumed uniform along the droplet.
Let us denote as f(x) the shape of the droplet, σ the liquid surface tension, ρ the liquid density and C
N, C
T the global (rotational plus gravitational) normal and tangential acceleration field values, respectively. The problem has not a unique intrinsic characteristic length (in general the droplet length is unknown) so usually the capillary length is used for non-dimensionalization [
19]. Recently, the problem of defining a relevant Bond number is reconsidered revealing that at least five different characteristic lengths have been employed in the literature [
20]. Even in the case of a known droplet radius, its use as characteristic length does not usually offer a meaningful non-dimensionalization. For example, in the case of normal force, the droplet height and not the droplet length is responsible for the effect of gravity. The new Bond number proposed in [
21] depends on force direction. For the above reasons it is found more convenient to use as characteristic length a size scale simply relevant to the actual one, instead of using the capillary length or a droplet dimension. This choice in the present work is L = 1 mm. The major advantage of this definition of Bond number is that it is a property of the external forcing field and is not related to the specific droplet studied.
The dimensionless linearized (i.e., exact in the limit df/dx << 1) two-dimensional Young–Laplace equation for simultaneous normal and tangential forces, with the corresponding Bond numbers denoted as Bo
N (=ρC
NL
2/σ) and Bo
T (=ρC
TL
2/σ), takes the form (f and x are normalized by L):
The parameter G is related to the pressure in the droplet and it is an unknown quantity which has to be found from the solution of the mathematical problem. Let us call β the contact line length of the droplet. The origin of the x axis (x = 0) is designated to the rear (with respect to tangential acceleration direction) droplet edge. The following conditions must be fulfilled by the function f:
where θ
1 and θ
2 are the front and rear contact angle, respectively, and V
A is the area under the droplet profile (i.e., two-dimensional “volume” or alternatively volume per unit length in the third dimension).
The general solution of the equation can be found as the sum of the homogeneous solution and of a particular solution:
where the symbols A = (Bo
N)
0.5 and E = Bo
T/Bo
N have been introduced for clarity of presentation. Substitution of Equation (7) in Equations (2)–(4) leads to the following Equations (8)–(10), respectively:
Eliminating G between Equations (8) and (9) leads to:
The Equations (10) and (11) constitute a linear system for c
1 and c
2 which can be solved to yield:
Finally, substituting Equation (7) in (6) and eliminating G using Equation (8) leads to the following compatibility condition:
The above system of equations can be explicitly solved for θ
1 to give:
where
The angle θ
2 can be found from the condition (5) as:
Equation (15) relates θ
1 το V
A, β and Equation (16) relates θ
2 το θ
1, β. In any case, if two of the above four variables are known, the other two can be found from these equations. A partial validation of the analytical model arises as follows: The following compatibility conditions were previously found [
19] in case of only a tangential force applied:
By putting θ
1 and θ
2 equal to the advancing θ
a and the receding θ
r angle, respectively, the droplet is exactly at the critical condition for the onset of sliding so Bo
T should take its critical value Bo
Tc. Eliminating β from the above equations leads after some algebra to the relation:
Expanding the trigonometric terms to a Taylor series and keeping the first terms (valid in the limit of small angles) results in:
This equation is exactly the same with the one taken by expanding the well-known sliding condition [
7]:
in Taylor series for small angles.
It is noted that above conditions have no droplet size dependence of the critical sliding force. This dependence appears when the area VA is assumed to be the ratio of the droplet volume to droplet width in order to account for the third dimension.
3. Indicative Model Results and Discussion
In general, the literature work associates the motion of the rear droplet edge with sliding which is true for past experimental procedures by earlier researchers. Nevertheless, this is not true in the present case of a general force variation in which the rear droplet edge motion can be due to normal force reduction occurring simultaneously with a tangential force increase. The cases of only one force component examined before [
18] are based on the existence of a fixed point in the physical space (droplet center for normal force and rear contact line edge for tangential force). Therefore, the combination of forces leaves us with no fixed point in space (as is the case when a single force component increases). Let us assume that there is a valid droplet configuration with parameters β
o, θ
1o, θ
2o and the forces suddenly change to new values of Βο
Ν, Βο
Τ. The procedure of droplet shape variation is in general non-reversible and non-conservative so the exact trajectory Bo
N-Bo
T must be considered (i.e., there is no way to find directly what happens at the final conditions since the droplet evolution is history depended). In particular, the non-reversibility comes for setting limits θ
a and θ
r to the angle values (however, as far as the angles remain in-between the limiting values θ
a and θ
r, reversibility holds). The trajectory Bo
N, Bo
T must be followed by considering (infinitely small in theory but very small in calculations) small variation steps.
At the first step, Equation (15) is employed for calculation of θ1 setting β = βο. Then, θ2 is computed from Equation (16). In case of θr ≤ θ1, θ2 ≤ θa, the new droplet configuration is acceptable. If one of the angles overrides θa, then the exact point (force values) at which this angle takes the value θa must be found. For this, Equation (15) is solved for θ = θa having β as unknown. A similar procedure is followed if an angle becomes smaller than θr. The point with θ = θr must be found and then Equations (15) and (16) are solved for β. In general, the system of Equations (15) and (16) admits as input β or θ1 or θ2 and returns as output values of θ1, θ2 or β, θ2 or β, θ1, respectively. The above procedure is repeated for each step along the BoT–BoN trajectory. Of particular interest is the handling of the motion in the physical space. If a contact angle (or both) has the value θa or θr then the variation of β (positive for value θa, negative for value θr) is assigned to the motion of the corresponding contact line edge (or to both contact line edges in equal parts).
Let us first present what are the predictions of the model for some simple scenarios regarding the two forces. The case of a droplet with V
A = 5 mm
2, θ
a = 60° and θ
r = 40° with an increasing tangential force is examined. This case has been previously studied for zero normal force [
18], so the effect of non-zero normal force is examined here. It is found that the main effect of the normal force is just to elongate the droplet with a negligible effect to the shape at the two edges. The normal force does not influence the critical Bond number Bo
Tc and, thus, the critical detachment force which is compatible to the independency of force from the droplet size according to the present model (see Equation (19)). It is reminded that this independency refers only to two dimensions (extension to the third dimension leads to the proportionality of critical force to the droplet size appearing in the well-known Furmidge equation). The Bo
N is expected to affect the critical force for sliding in three dimensions through the droplet width dependence.
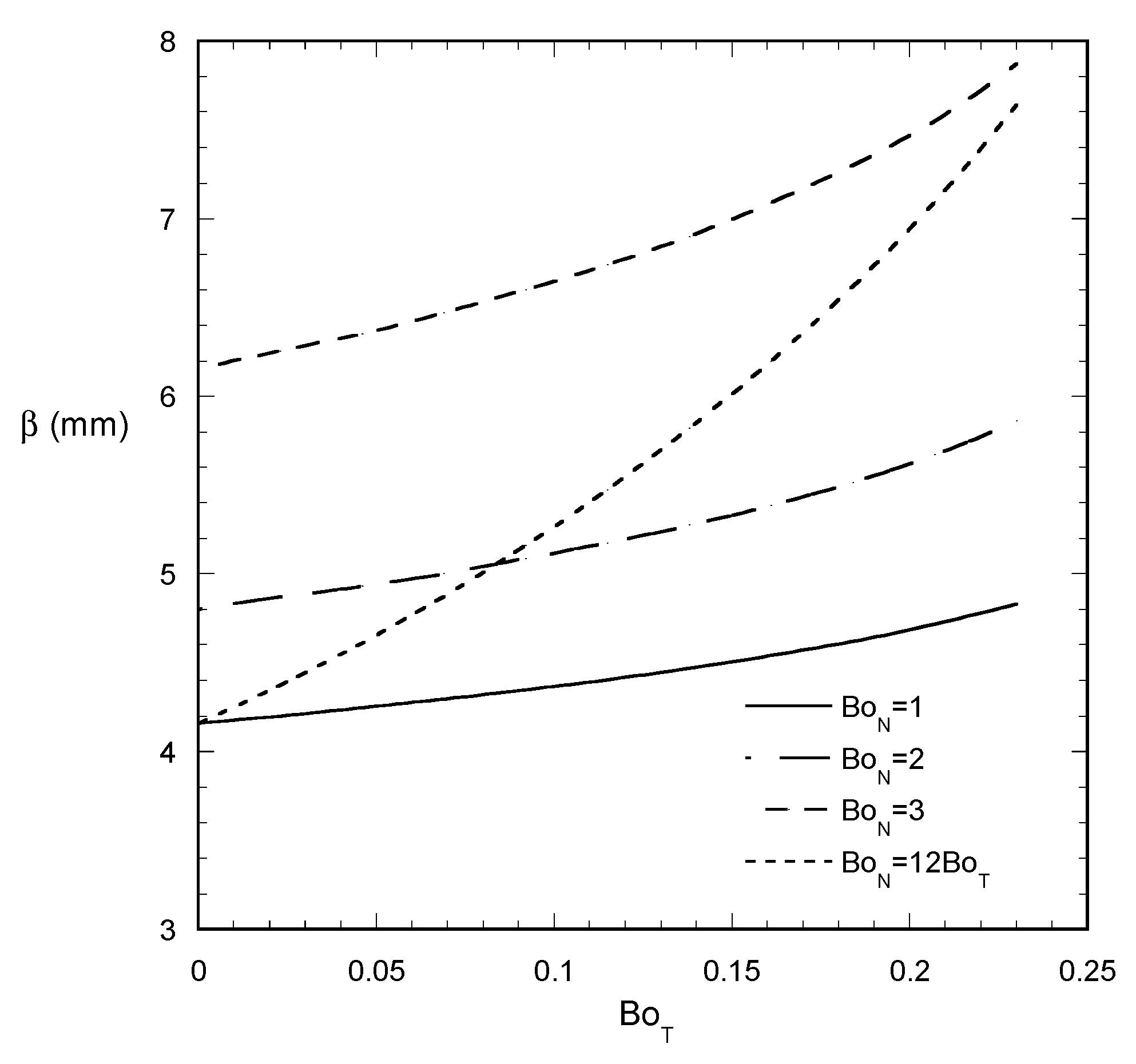
Figure 2 shows the increase of droplet length as Bo
T increases for an initial angle θ
0 equal to the advancing one. The evolution of the droplet profiles is quite similar to those for zero normal force [
18]. In addition, introducing an oscillation of the tangential force (i.e., Bo
T varies periodically between 0 and Bo
Tc), a similar periodic behavior of droplet shape is taken independently of the normal force. In particular, after the initial transient the droplet shape retains its length (taken at Bo
Tc) and its two angles θ
1 and θ
2 oscillate following certain curves already found for Bo
N = 0 in a previous study (e.g., see [
18] for details).
A more interesting scenario is the simultaneous increase of both force components (in the case of absence of gravity it corresponds to increasing the rotation speed at a fixed tilting angle). Considering exactly the same set of parameters as for a constant normal force plus the relation of Bo
N = 12 Bo
T, very interesting results are obtained. At the starting transient the droplet length increases crossing the lines of constant Bo
N (
Figure 2). Under the particular conditions of the transient, a function β(Βο
Ν,Βο
Τ) can be constructed which can give directly β for arbitrary Bo
N–Bo
T trajectory. The idea behind the proposed scenarios is not the direct imitation of practical situations but the allowance to understand better the droplet shape evolution process in order to create models for any practical situation.
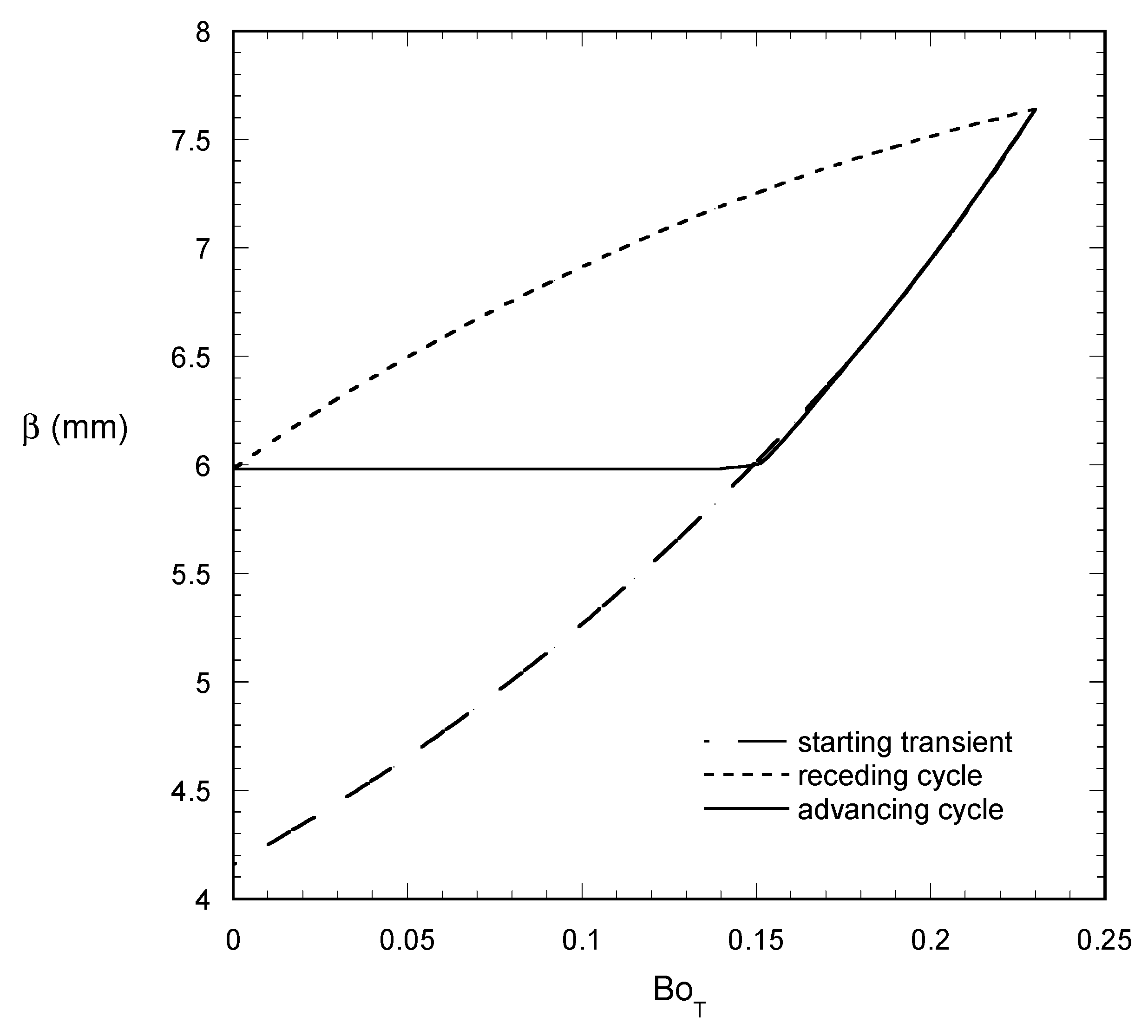
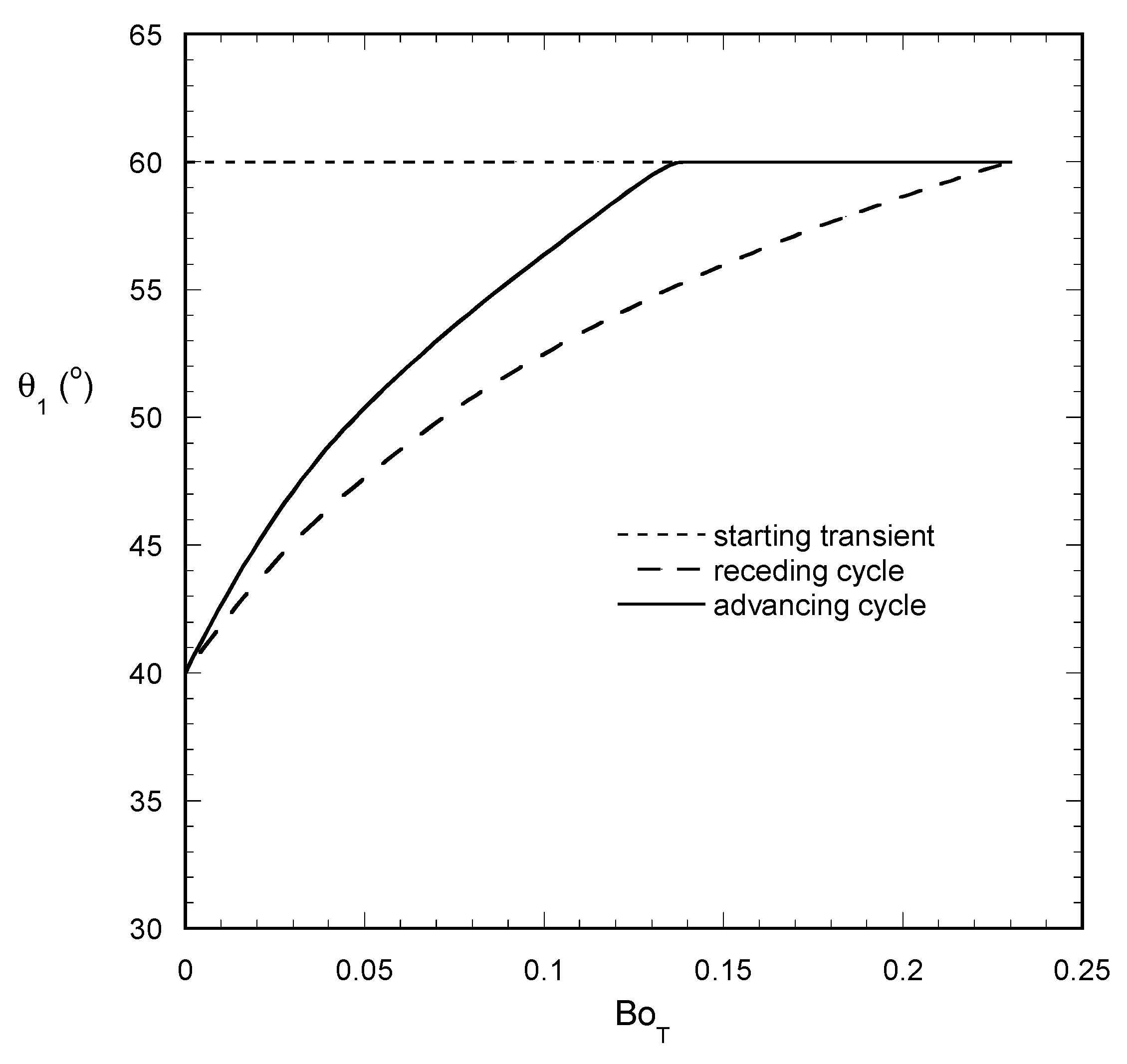
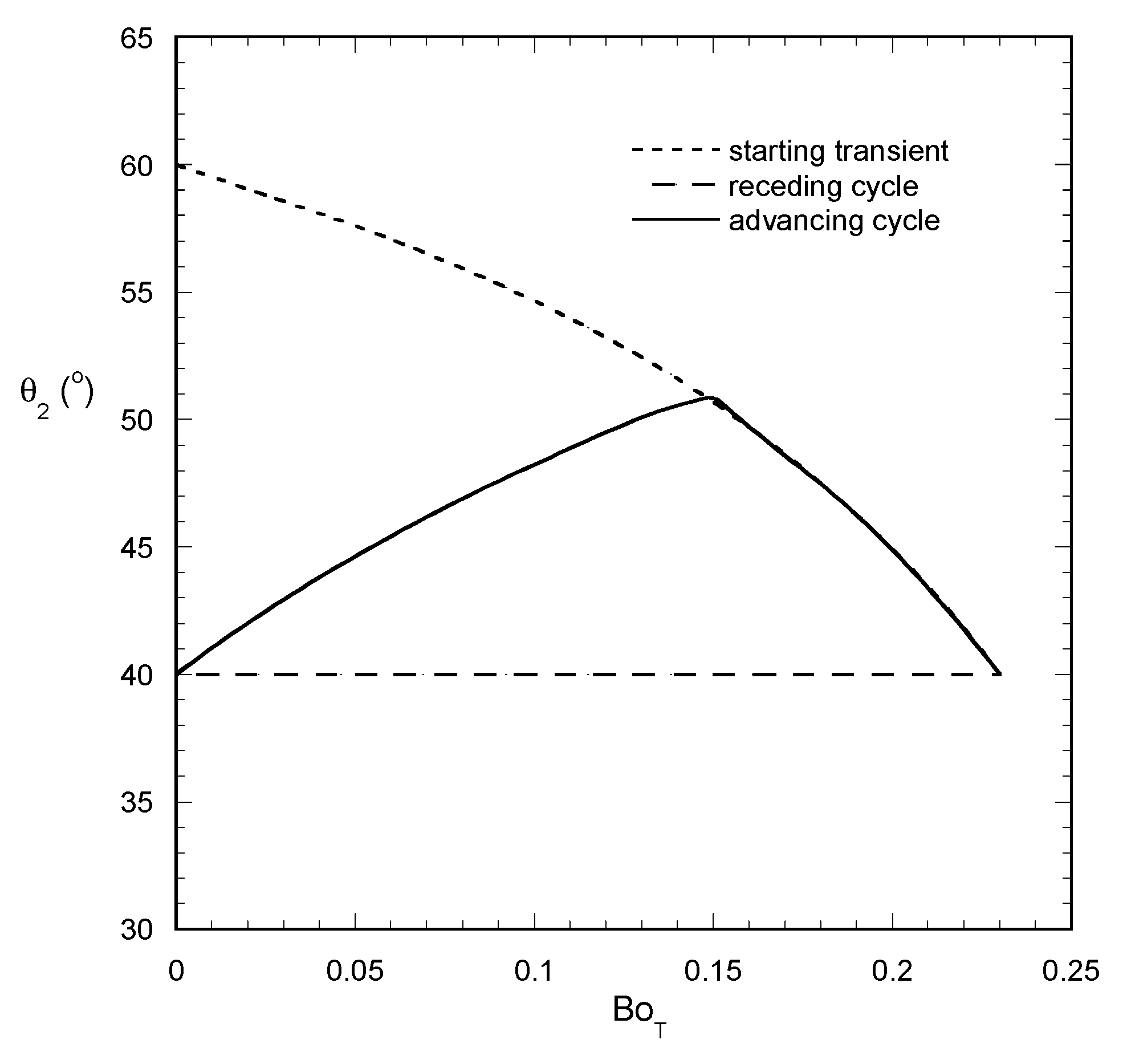
The oscillating force scenario is examined next. It is noted that the imparted oscillations are simultaneous for both components in order to keep their ratio constant (i.e., increasing and decreasing rotation speed for constant tilting angle in the absence of gravity). After the initial transient, the droplet gets into a steady periodic behavior. Interestingly enough, this behavior is quite different than the one found for constant Bo
N since not only the contact angles but also the droplet length varies periodically. The evolution of droplet length β, front angle θ
1 and rear angle θ
2 for periodic forces oscillation is shown in
Figure 3,
Figure 4 and
Figure 5, respectively. The periodic cycle advancing part (i.e., increasing forces) contains a part in which the droplet length is constant and the angle θ
1 increases. As the point θ
1 reaches the value θ
a (advancing contact angle), the drop length starts increasing up to the critical point for sliding. Then, at the receding cycle, the length of the droplet decreases and the angle θ
1 goes from the advancing angle to the receding angle value. Even more interesting is the behavior of the angle θ
2 which at the receding cycle retains always the value θ
r. At the advancing cycle, it increases as far as length β remains constant acquiring a maximum at the point of β transition (from constant to increasing) and then decreases up to the critical point for sliding.
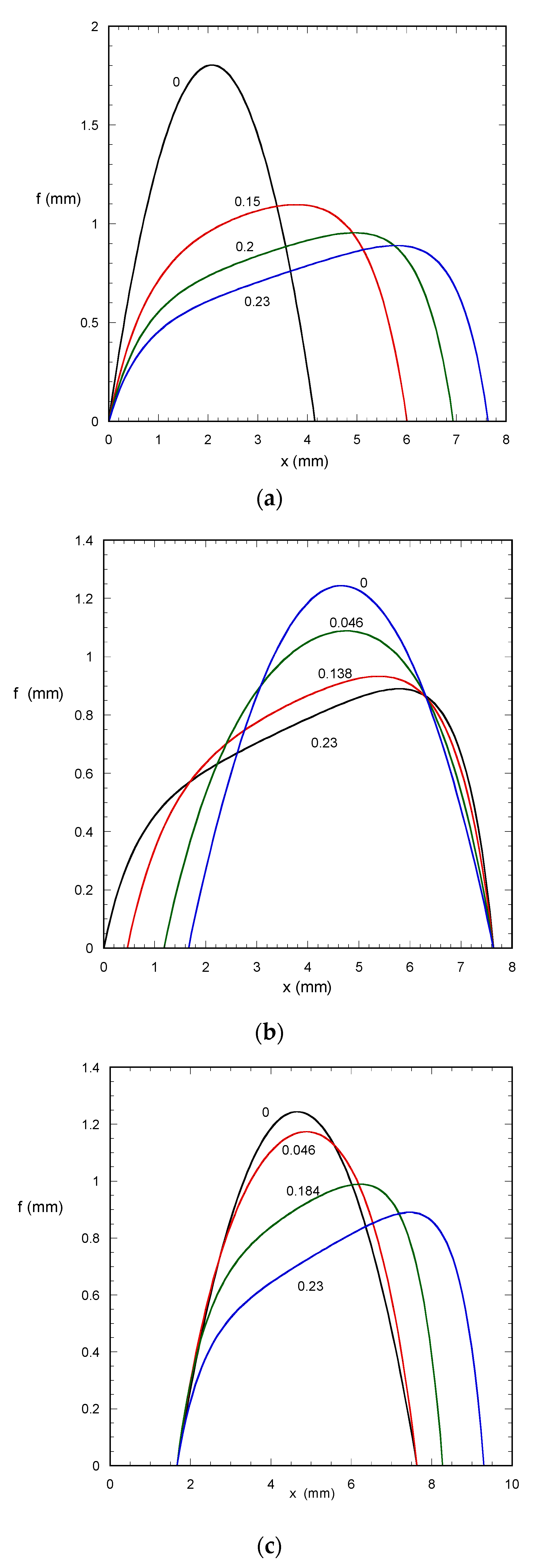
Typical droplet profiles that correspond to the results shown in
Figure 3,
Figure 4 and
Figure 5 are presented in
Figure 6 for periodic forcing and Bo
N = 12 Bo
T. It must be noted that for clarity in the presentation the scales at the two axes are different leading to distorted views of the droplet profiles.
Figure 6a refers to the starting transient. As Bo
T increases, the symmetry is destroyed but also the length increases due to increase of Bo
N. The receding cycle profiles are shown in
Figure 6b. The angle θ
2 has the value θ
r at the beginning of the cycle. The reduction of tangential force leads to increase of the angle θ
2, but the reduction of the normal force leads to its decrease which overall prevails leading to retraction of the rear contact line edge. Therefore, the rear contact line retraction is due to the reduction of the normal force. The front contact line does not retract due to the higher value of θ
1 than θ
2 in the beginning of the receding cycle. The cycle ends with a symmetric drop (zero tangential force) with angles at their receding values. The profiles for the advancing cycle are shown in
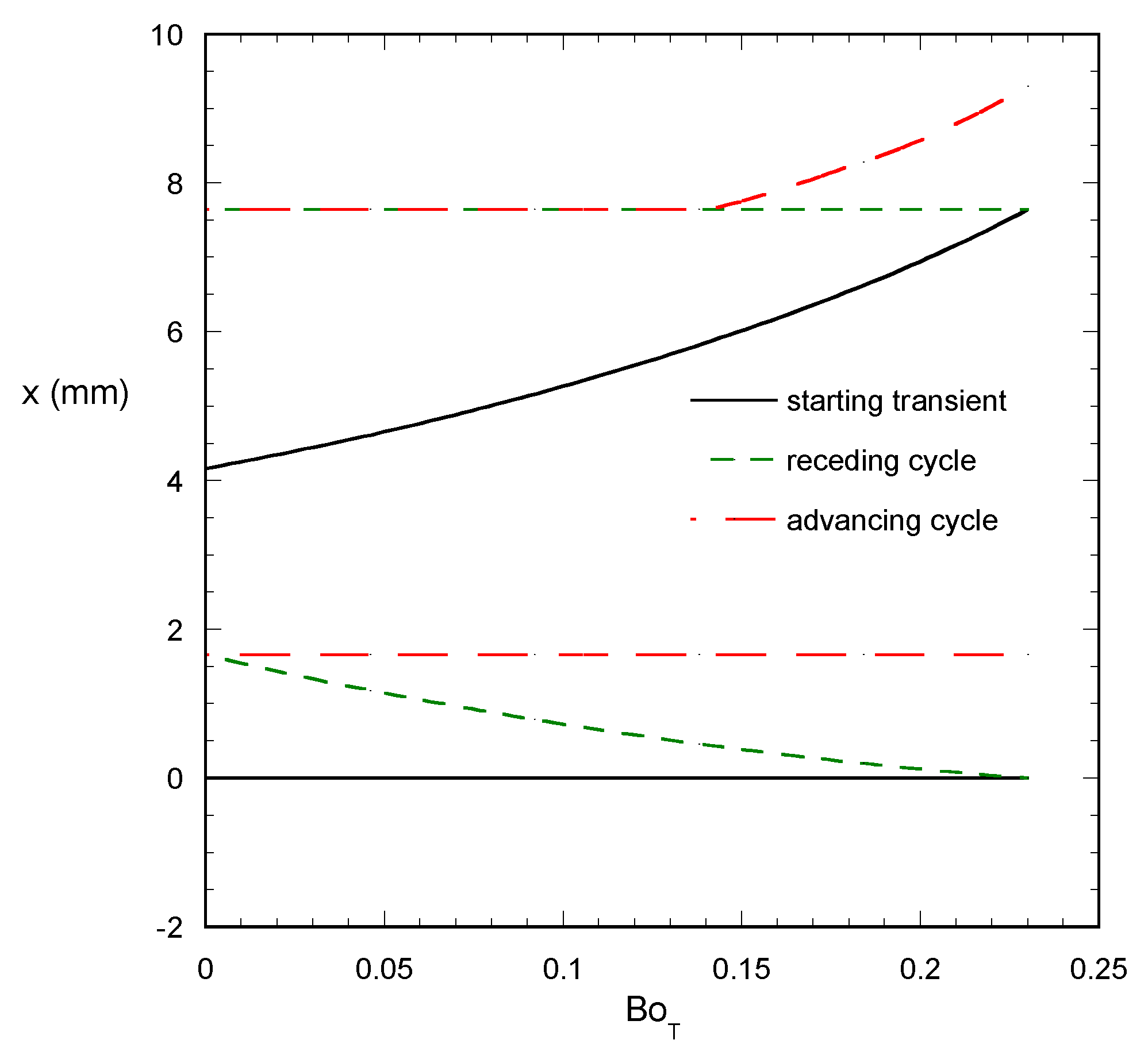
Figure 6c. Initially, the droplet retains its length and both angles increase. At some point, the front angle reaches the advancing value, so the droplet length starts increasing and the rear angle starts decreasing. The front contact line edge moves leading, at the end of the cycle, to the same droplet shape as in the start of the cycle but at a different physical (spatial) position (see the x values of both edges). Such a behavior cannot be identified by the parameter variation appearing in
Figure 3,
Figure 4 and
Figure 5. To better identify the situation, the variation of the physical position of the two contact line edges of the droplet during one cycle is presented in
Figure 7. The region between the two lines in this figure (for each cycle) corresponds to the physical space occupied by the droplet. From this figure, it is clear how the droplet initially expands, then, when it gets in the oscillating regime, retracts and, finally, expands again but with a different fixed point. This motion pattern appears in each oscillation cycle leading to an effective overall droplet motion (shift by 1.66 mm per cycle) which is exclusively due to the simultaneous variation of Bo
N with Bo
T. The situation arising here has a very interesting sequence: The macroscopic motion of the drop cannot be identified as spreading (dominated by surface energy) or sliding (dominated by hydrodynamics) in case of complex force scenarios.
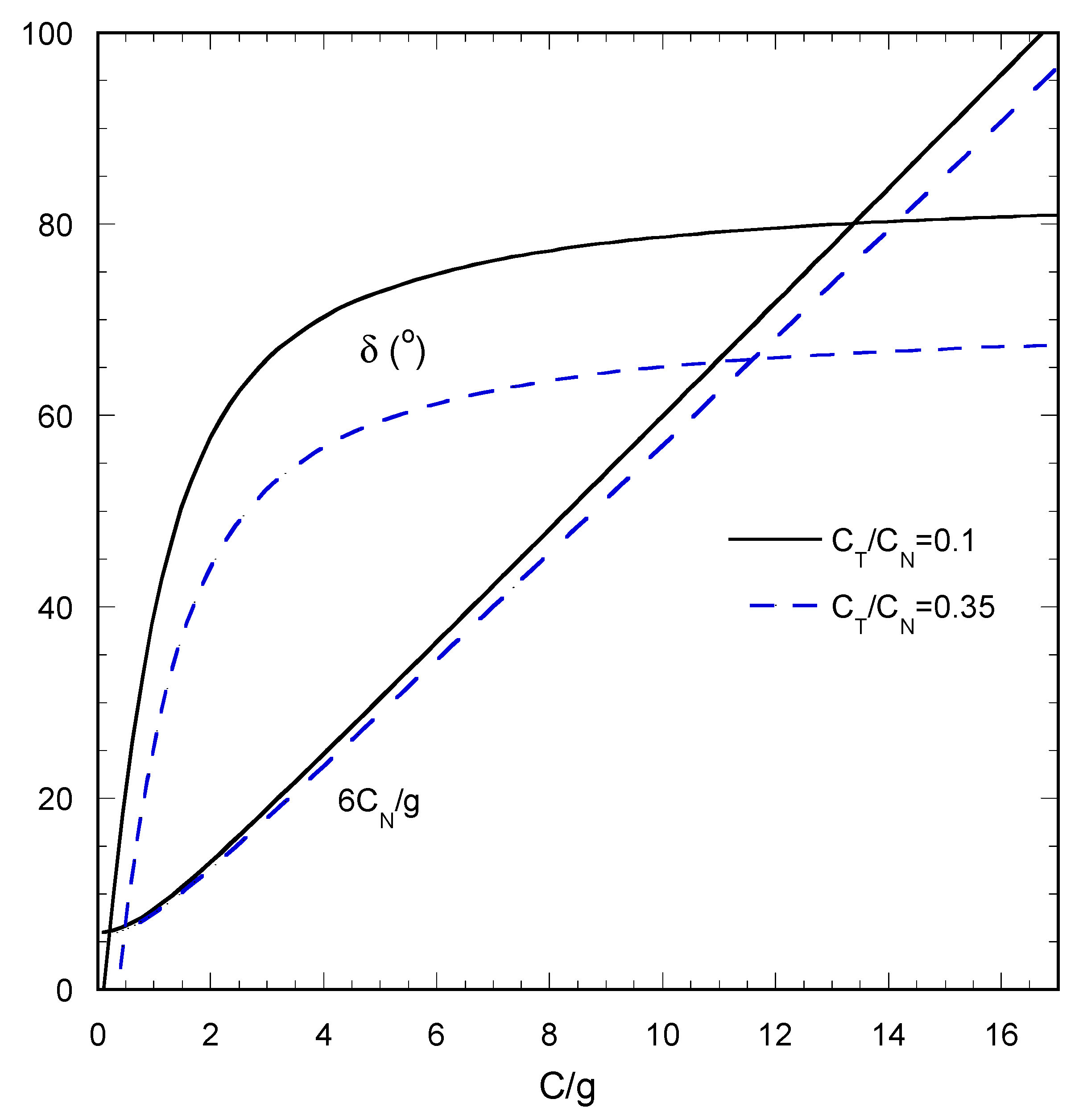
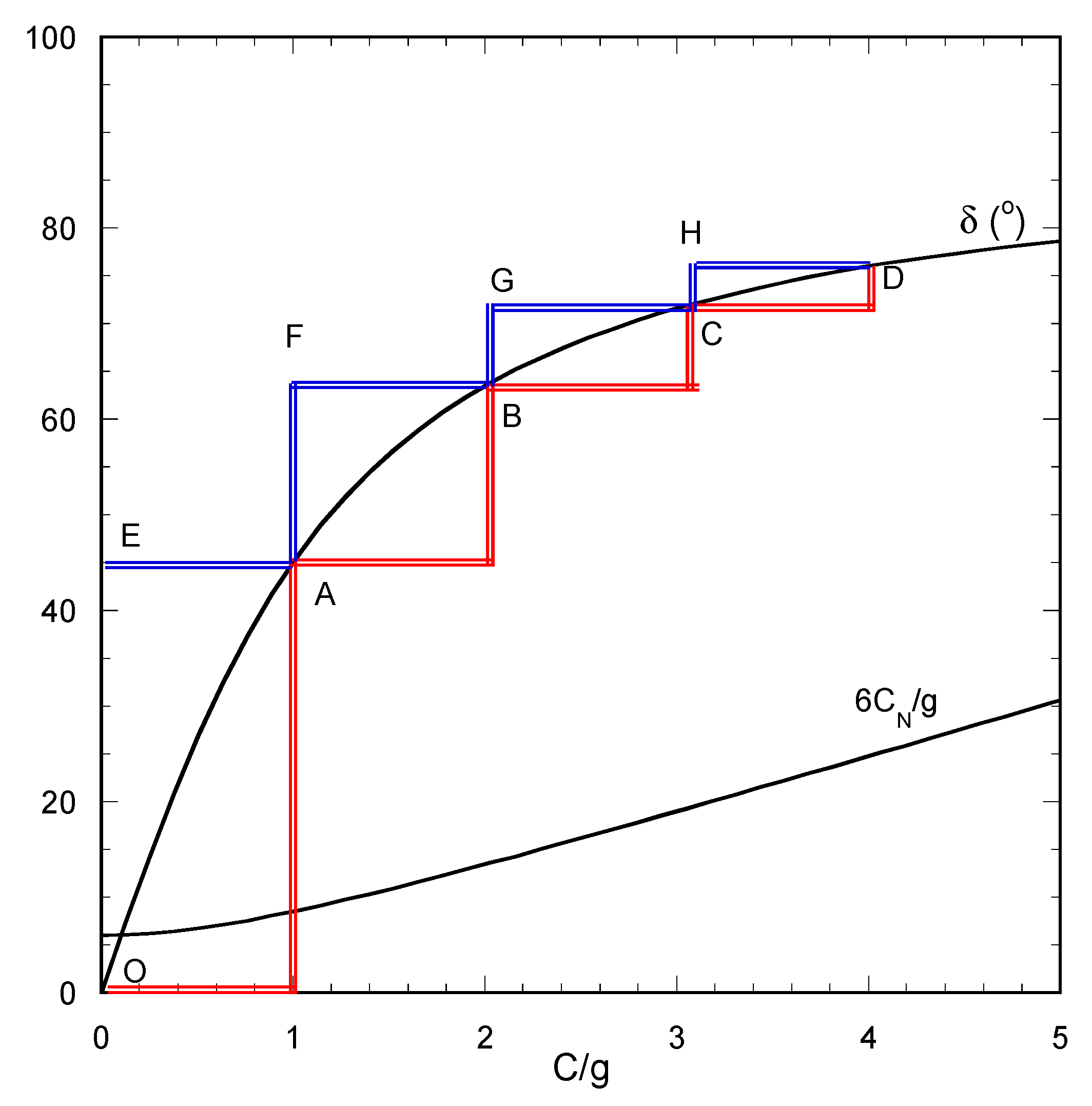
The scenarios of BoN–BoT variation examined up to now appear idealized in the absence of gravity but in practice terrestrial gravity is always present so their realization is rather cumbersome. Let us consider the very basic case of increasing the normal force while keeping zero the tangential force. To realize this in the absence of gravity the tilting angle should be 90° (vertical substrate parallel to axis of rotation). However, in the presence of gravity, the tilting angle must vary simultaneously with the rotation speed in order for the tangential component of gravity and rotation to be counterbalanced. This implies a tilting angle of 90° in which the tangential acting of gravity is present. Let C be the rotational acceleration magnitude and δ the inwards tilting angle. The condition of zero tangential force leads to C/g = tan (δ) which means that the rotation speed and the tilting angle must evolve simultaneously satisfying always this condition. The normal acceleration is given by CN/g = cos (δ) + tan (δ) sin (δ).
The scenario of constant ratio of acceleration components examined above is discussed next. In the absence of gravity this corresponds to a constant value of δ as already noticed. An analysis in the presence of gravity leads to
The required variation of δ with C for two values of the component ratio is shown in
Figure 8. The general shape of the δ vs. C curve is similar to the case of zero C
T. The normal acceleration component is also shown in the figure. The form of the function δ vs. C indicates that the required trajectory is technically quite difficult to be exactly followed. There is large sensitivity with respect to rotational speed for small speeds and with respect to the tilting angle for large speeds. In practice, the trajectory can be followed only in discrete steps which, even if they are small, they still create excess forces. The influence of these forces can be assessed employing the analytical droplet model. In order to demonstrate the procedure a very coarse (four steps) stepwise approximation of the continuous δ–C curve for zero tangential force is considered. There are two routes to achieve this: (i) first vary the tilting angle δ and then vary C (i.e., rotational velocity) in each step (blue line at the left of continuous curve in
Figure 9) and (ii) first vary C and then vary δ (red line at the right of continuous curve in
Figure 9). Computations show that the second route leads to larger tangential forces so droplet profiles are shown only for the first route. The same droplet parameters as before are considered except for θ
r which is assumed to be zero to avoid droplet sliding. It is also assumed that Bo
N = C
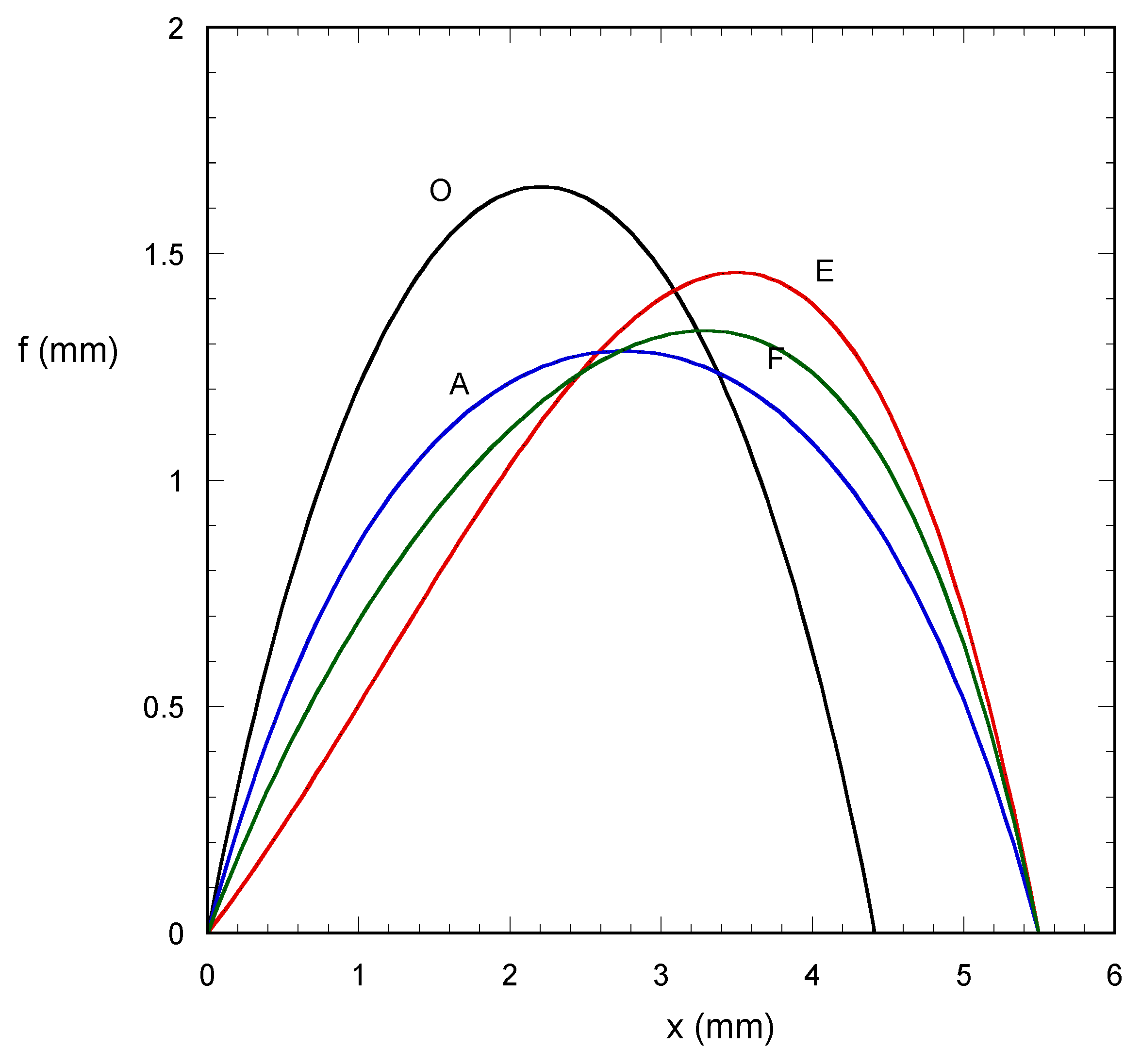
N/2.5. Some profiles for specified positions along the blue route are shown in
Figure 10.
At position E, the variation of δ without the counterbalancing effect of C leads to a significant tangential force which for θ
r = 40° would lead to droplet sliding. The tangential force increases the contact line length of the droplet. At the other displayed positions (A, F), the droplet length remains constant whereas the shape alternates between symmetric (A position at the continuous curve in
Figure 9) and asymmetric (F position outside the continuous curve in
Figure 9) with a decreasing difference between the two states as C increases.
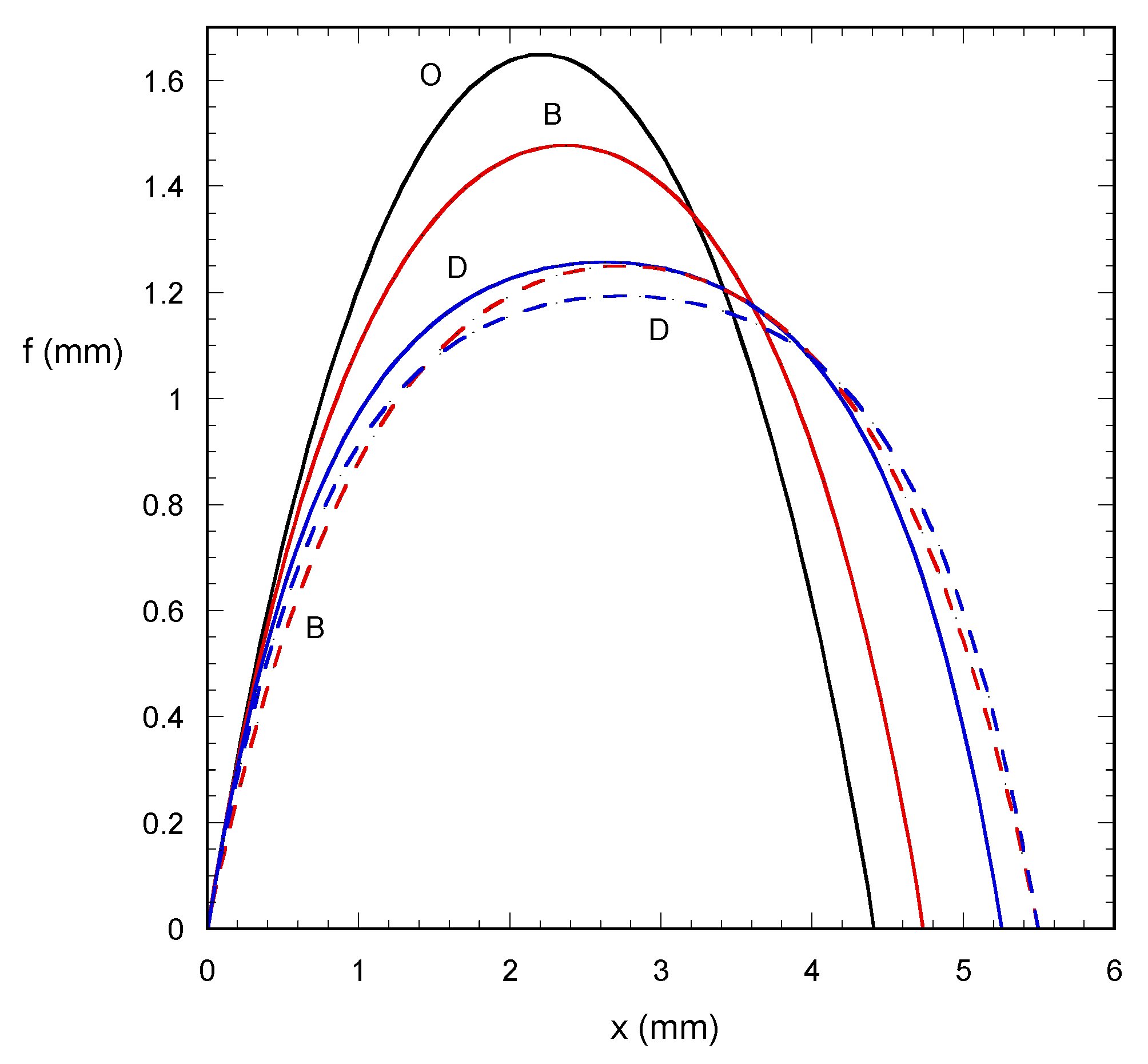
The comparison of droplet profiles at positions B and D reached through the continuous curve and through the left stepwise one (blue line in
Figure 9) is presented in
Figure 11. The difference between the two routes in position B (red curves) is very large since the droplet has been elongated abruptly by the tangential force raised by the stepwise route. As the normal force increases the droplet, the following continuous route is progressively elongated leading to small differences between the profiles from the two trajectories at position D. The above case study reveals the complexity of the problem combining the technical limitations on applied forces variation and the physicochemical aspect of droplet spreading. This is why the simple model presented herein is useful to assess different experimental procedures and as a starting point for more detailed calculations. A partially qualitative confirmation of the resulting behavior regarding the oscillations of tangential force and the force step scenarios can be found in [
8].
The main aspect of the model that creates the droplet evolution is the interaction between the applied forces scenario and the onset of motion condition (θ ≤ θ
a and θ ≥ θ
r). In this respect, the conclusions are expected to be qualitatively valid for real droplets. However, in pursuing a quantitative analysis it has been implied, [
8], that the main deviation of the present approximation from reality is due to the linearization of the Young–Laplace equation and not due to the reduced dimensionality. It is reminded that the linearization is valid in the limit of very omniphilic surfaces. The present model serves the scope of being the simplest case (and the only analytic one) capable of reproducing the qualitative droplet behavior under complex force scenarios. Our final aim is to relax the simplifications using approximate solutions of the governing equations.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










