1. Introduction
Autonomous Underwater Vehicles (AUVs) excel in underwater operations such as seabed mapping and pipeline inspection due to their superior maneuverability [
1]. Their motion planning systems enable autonomous navigation by generating collision-free trajectories through complex marine environments. Integrated high-precision INS [
2] with multi-sensor fusion provides real-time navigation data and precise obstacle localization, allowing accurate calculation of safety distances and boundary constraints. This integration ensures reliable obstacle avoidance and safe path planning for AUVs operating in challenging underwater conditions.
AUV motion planning research focuses on global and local techniques [
3]. Global methods, adapted from terrestrial robotics, include graph search algorithms (Dijkstra’s [
4], A* [
5], D*), sampling-based approaches (RRT, PRM [
6]), optimization algorithms (genetic algorithms, simulated annealing, particle swarm optimization [
7]), and heuristic methods (ant colony algorithms [
8]). These have been modified for marine applications. Intelligent techniques like neural networks [
9], deep learning [
10], and reinforcement learning [
11] are also utilized. The study in reference [
12] introduced an Integral Reinforcement Learning (IRL)-based global planning approach that achieves optimized motion planning through online learning and iterative updates. However, the complexity of marine environments often limits global methods to providing only initial reference trajectories, as they struggle with real-time re-planning demands.
To tackle the issue of rapid online planning, several local motion planning methods have been put forward. These include artificial potential field methods [
13], the dynamic window approach [
14], and fuzzy logic control [
15]. Because Model Predictive Control (MPC) can conduct online rolling optimization, it finds widespread application in the motion planning of marine vehicles. Recent advancements in MPC-based planning for autonomous marine vehicles were systematically reviewed in reference [
16], highlighting its adaptability in hydrodynamic environments. However, critical gaps persist, particularly in ensuring operational safety under complex constraints, including real-time collision avoidance guarantees and formal safety verification mechanisms for dynamic obstacle scenarios.
In reference [
17], spline functions were introduced as templates for the path planning of AUVs by MPC. Simulation experiments verified the feasibility of their MPC-based dynamic path planning algorithm. Subsequently, in reference [
18], taking advantage of MPC’s remarkable real-time optimization capabilities, a receding horizon optimization (RHO) scheme was put forward, which exhibited strong stability and effectiveness during path planning. Reference [
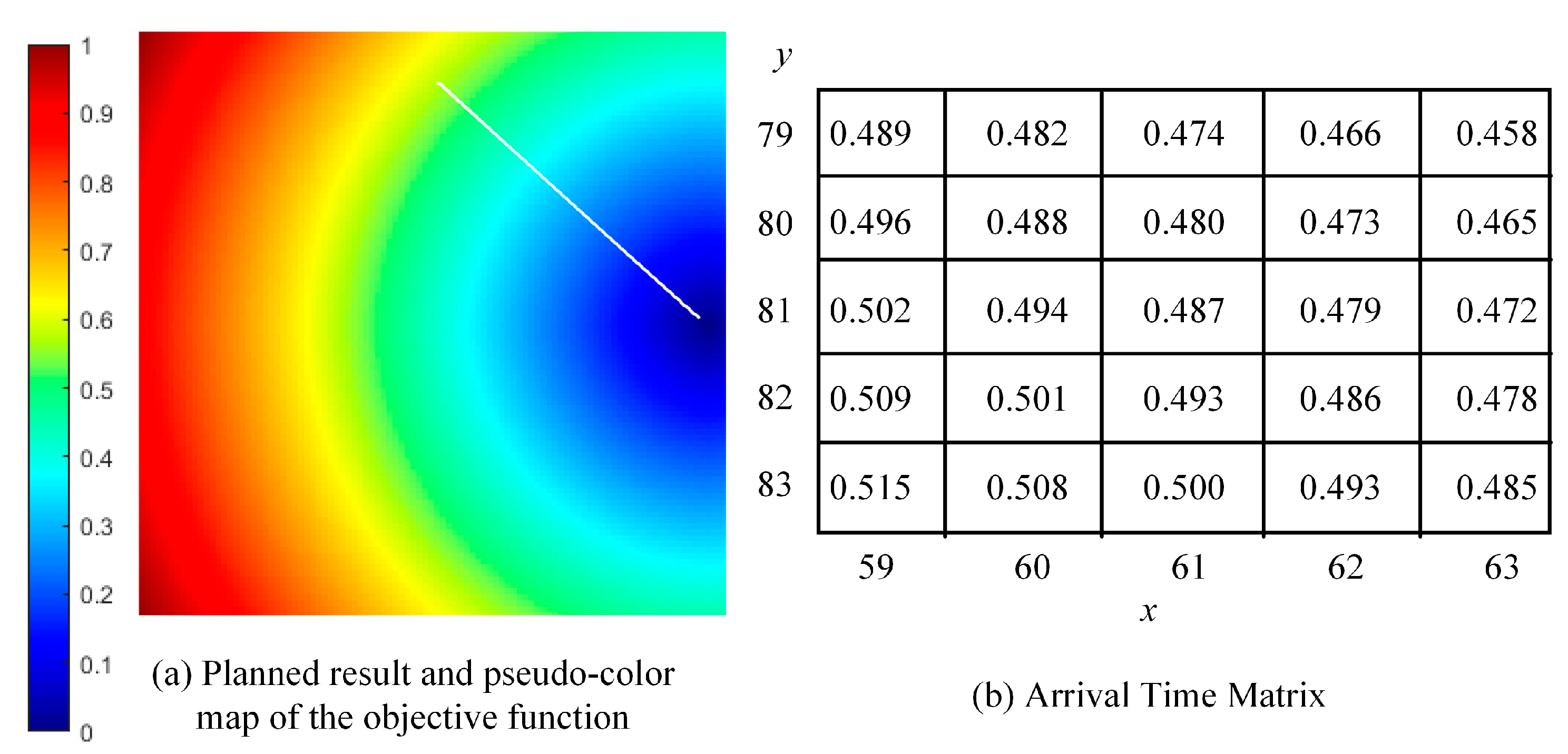
19] incorporated the arrival time matrix derived from the fast marching method into the MPC objective function. By doing so, it managed to reduce the path-traversing time within short prediction horizons. The authors in reference [
20] developed an integrated perception-planning framework, where sonar-based environmental imaging was processed through convolutional neural networks (CNNs) and Transformers for precise obstacle detection and characterization. This perceptual data was subsequently integrated with MPC for real-time collision avoidance. In the research domain of AUV path planning and control, Shen et al. developed a tracking control algorithm that was integrated with dynamic path planning [
18].
The synergistic integration of MPC with Control Barrier Functions (CBFs) represents a transformative approach to safety-critical motion planning, ensuring real-time constraint satisfaction while maintaining system agility. There are two types of control barrier functions, namely the zeroing and reciprocal barrier functions, which are designed to ensure that the system state remains within a safe set [
21]. In recent years, these functions have witnessed widespread utilization in the realm of robot safety motion planning. In reference [
22], discrete-time CBFs grounded in MPC control are introduced to handle external position disturbances. Additionally, moving horizon estimation (MHE) is employed to approximate the truncation errors that arise from the discretion process. Reference [
23] also makes use of discrete control barrier functions, integrating them with a model predictive control framework to realize safety-critical motion planning for robots. Reference [
24] establishes an elliptical equation for obstacles to calculate the distances and construct CBFs for obstacle avoidance. Nonetheless, references [
22,
23,
24] abstracts obstacles into circular or spherical shapes. This approach suffers from a lack of adaptability to various other shapes. In response to this limitation, reference [
25] proposes an obstacle avoidance barrier function tailored for polyhedral obstacles in robots’ environments. By combining it with MPC, safety-critical motion planning can be achieved. Reference [
26] indicates that non-smooth control barrier functions can be applied to motion planning. However, both references [
25,
26] concentrate on regular rectangular or polyhedral obstacles.
In reference [
27], a comparison is made between control barrier functions and artificial potential fields in the context of robot motion planning, which is called model predictive control—artificial potential field control barrier function (MPC-APFCBF) in this paper. Corresponding control barrier functions are designed based on the attraction and repulsion functions of artificial potential fields. In reference [
28], a novel approach is proposed to enhance Unmanned Aerial Vehicle (UAV) safety through the establishment of extended interference dead zones specifically designed for unknown and moving obstacles. Reference [
29] also focuses on dynamic obstacle environments, proposing a perception-aware online trajectory generation system for Unmanned Surface Vehicles (USVs) to perform prescribed maneuvers in dynamic unstructured environments. This system combines the Inverse Dynamics in the Virtual Domain (IDVD) method with an Event-Triggered Receding Horizon Control (ETRHC) mechanism, enabling the generation of safe and quasi-optimal trajectories in real-time. The effectiveness and robustness of the approach were validated through simulations. Reference [
30] presents a composite strategy that integrates an enhanced A* algorithm with MPC to improve path planning and dynamic obstacle avoidance for UUVs in complex marine environments, where obstacles are modeled as spheres and cylinders.
In general, the fundamental principle of combining MPC with CBFs is as follows: MPC generates trajectories through rolling horizon optimization, making it well-suited for real-time motion planning. CBFs ensure system safety by constructing a safety function as a constraint within the MPC framework, guaranteeing that the system state remains within a predefined safe set. However, existing studies still face significant challenges in ensuring safety in environments with narrow or irregularly shaped obstacles, as well as in scenarios involving dynamic or moving obstacles. In practice, AUVs operate in underwater environments that are often cluttered with obstacles of varying shapes and narrow passageways, where safety is paramount. To bridge the gap between current research and real-world requirements, this paper proposes an obstacle avoidance barrier function based on a fast marching algorithm, specifically designed to address these challenges. In summary, the innovations of this paper can be summarized as follows:
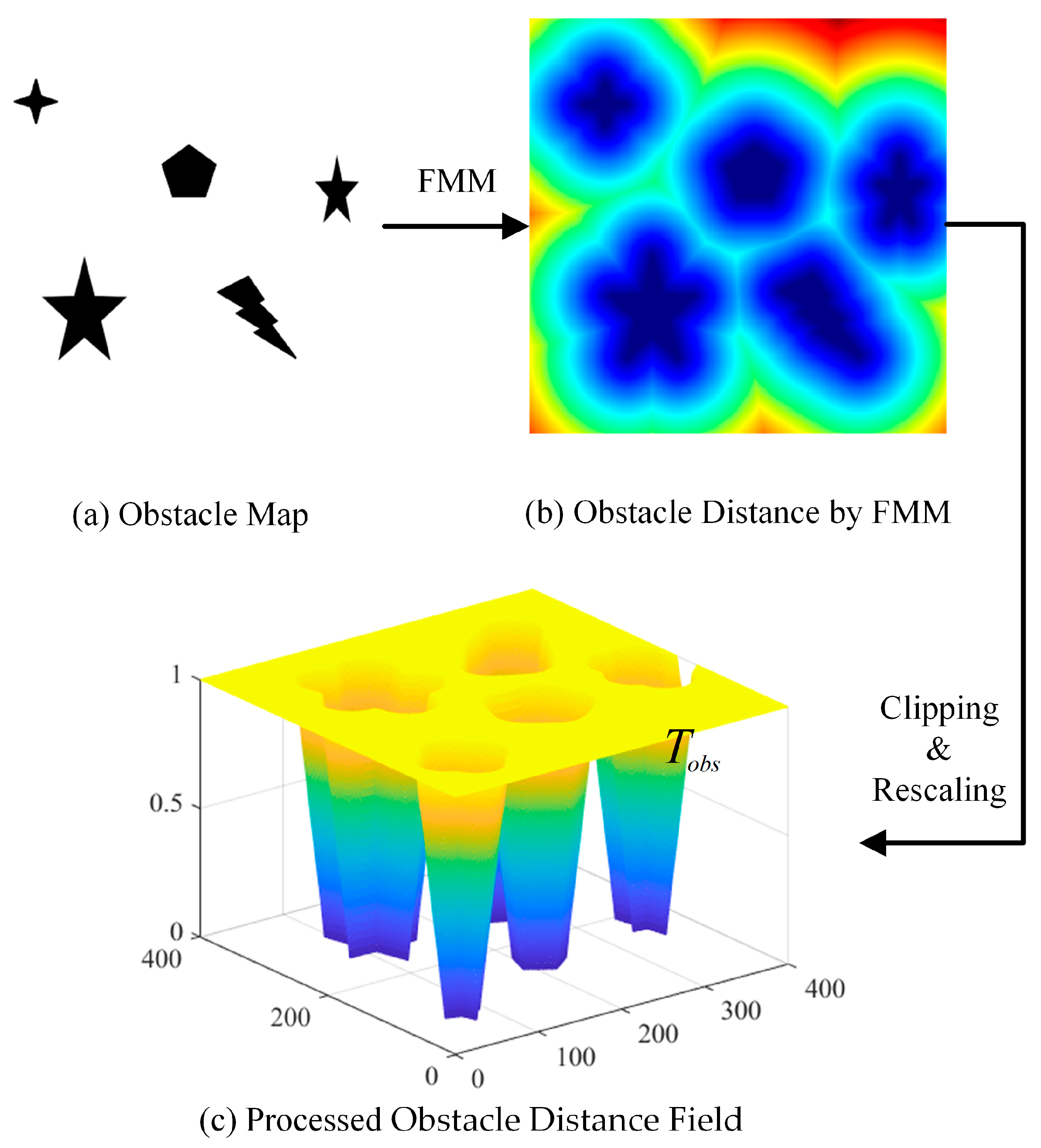
(1) Novel FMM-based CBF for Complex Obstacle Geometries: A new control barrier function based on the fast marching algorithm (FMM) is proposed, specifically designed to handle environments with complex and intricate obstacle shapes. This approach overcomes the limitations of traditional methods that rely on simplified obstacle representations (e.g., circles or polygons).
(2) Dynamic Obstacle Handling via Velocity-Adjusted FMM Propagation: An enhanced method for dynamic obstacle avoidance is introduced, which extends the control barrier function field propagation along the direction of obstacle movement. This ensures that the AUV maintains a safe clearance from moving obstacles, even in highly dynamic environments.
(3) Robust MPC-FMCBF Framework Validated in Simulations: A robust MPC framework is developed, integrating the proposed fast marching-based control barrier function (FMCBF). This framework effectively ensures AUV safety in complex environments while significantly improving navigation security, as demonstrated through extensive simulations.
The remainder of this paper is structured as follows:
Section 2 presents the problem description.
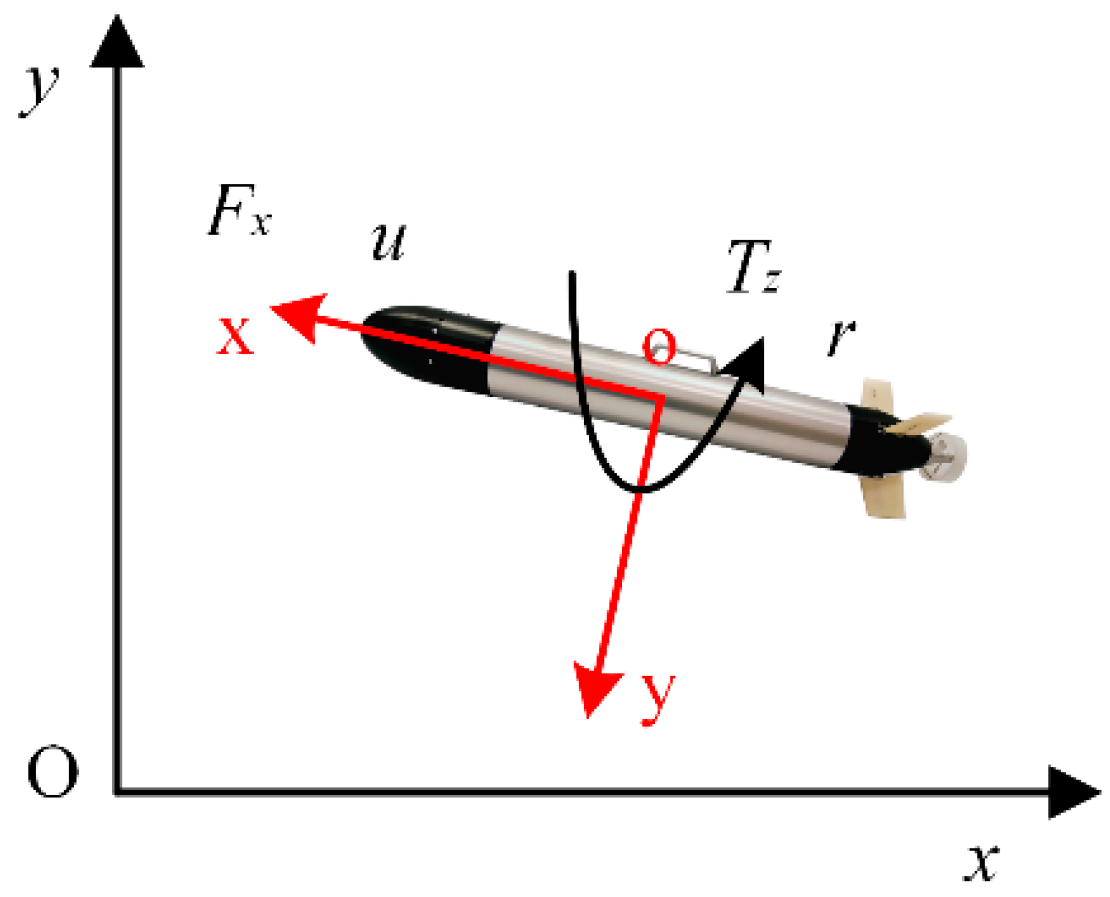
Section 3 provides the model of AUV.
Section 4 details the proposed algorithm, which is analyzed in
Section 5. Simulation results are presented in
Section 6. Finally,
Section 7 concludes the paper.
6. Simulation Study
During the simulation validation phase, the study systematically evaluated the algorithm’s performance across three distinct scenarios. Initially, global motion planning was conducted in a scaled-down replica of a real coastal map, enabling comparative analysis of various algorithms under identical environmental conditions. Subsequently, the algorithm’s capability was tested in artificially constructed environments featuring narrow channels, simulating challenging navigation conditions. Finally, the evaluation extended to dynamic environments with fast-moving obstacles, where the algorithm demonstrated superior safety in path planning.
The MPC framework was configured with the following parameters: sampling time step of 0.01 s, control horizon
, prediction horizon
, maximum linear velocity of 2 m/s, maximum turning rate of 0.4 rad/s, linear velocity increment range of [−0.2, 0.1] m/s, angular velocity increment range of [−0.15, 0.15] rad/s,
,
, and
. The simulation assumed an AUV equipped with a fully directional sonar system with a reliable detection range of 30 m and no sensor noise, and
Table 2 lists its parameters.
All simulations were executed on a high-performance computing platform featuring an Intel(R) Core(TM) i7-10750H CPU @ 2.60 GHz with 32 GB RAM, running Windows 10 Operating System. The algorithms were implemented and executed in MATLAB 2022b, utilizing the “fmincon-sqp” optimization solver for efficient computation.
6.1. Global Motion Planning
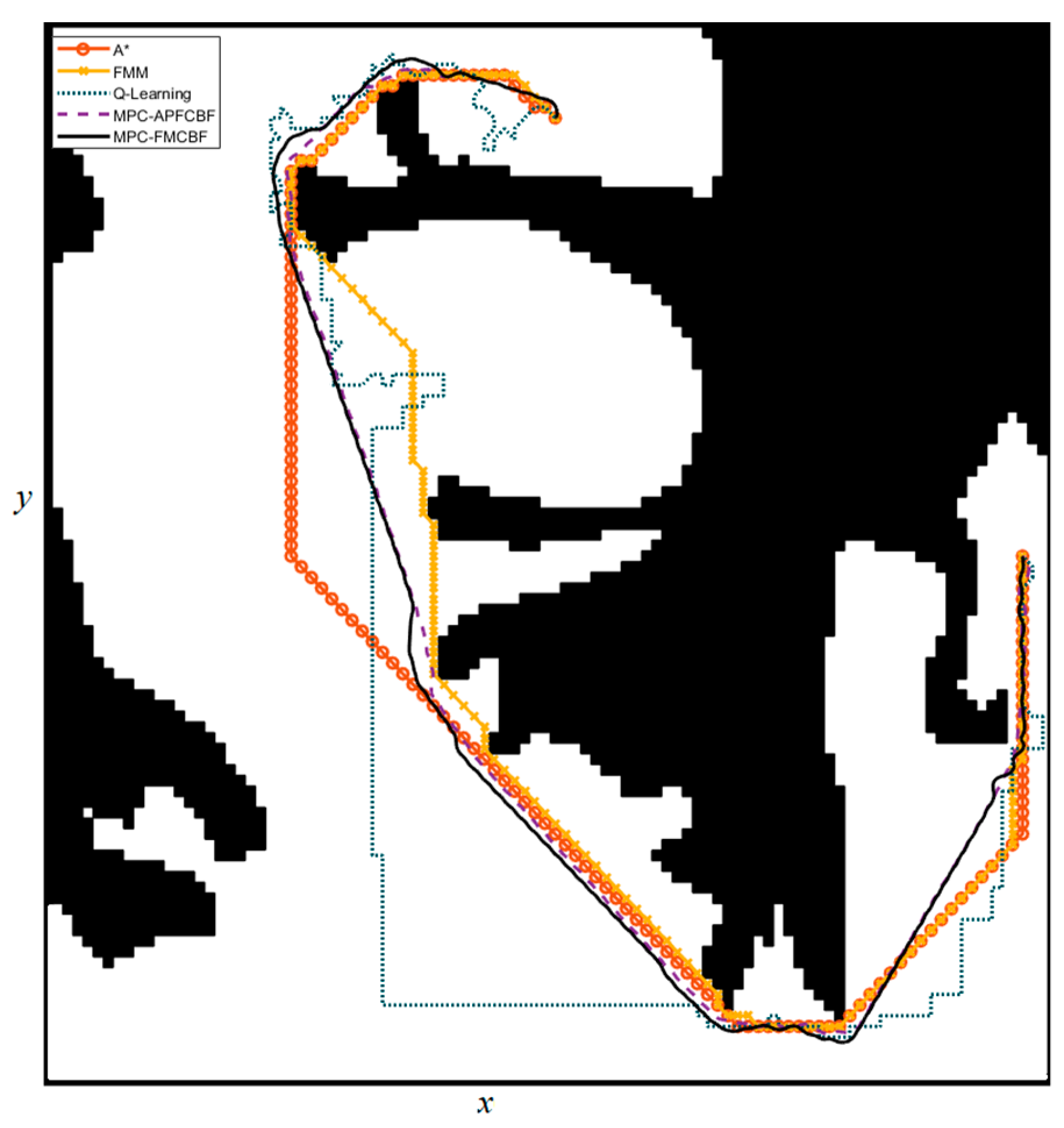
In the global simulation, the map environment is a scaled-down version of a real coastal map. In this environment, the path planning algorithm must be cautious to avoid collisions with black obstacles. The main challenge lies in navigating from the starting point through these irregular spaces, overcoming numerous obstacles, and ultimately reaching the destination safely. This environment tests the intelligence and flexibility of the path planning algorithm, which should maintain a certain safety distance from obstacles to ensure the AUV’s safety.
Figure 7 shows the results of the motion planning. According to the simulation results, the paths generated by the A*, FMM, and Q-Learning (QL) algorithms have a minimum distance of 0 m from the obstacles, indicating that these algorithms fail to effectively avoid obstacles and pose a direct collision risk. Although their total path lengths are shorter (e.g., 191.1 m for A* and FMM), their safety is severely inadequate for practical scenarios. In contrast, MPC-FMCBF maintains a safe distance (1.86 m) while only increasing the path length to 195.2 m, significantly outperforming other algorithms in overall performance. Its advantage stems from the synergistic control of dynamic optimization and safety boundaries: by using model predictive control to adjust the path in real-time and adding the obstacle distance control barrier function of the fast marching method as a safety constraint, it avoids collisions while ensuring path efficiency. In summary, the proposed algorithm achieves a path length of 195.2 m, which is only 2.1% longer than the unsafe benchmarks (e.g., A* and FMM). At the same time, it maintains a minimum safe clearance of 1.86 m, compared to 0 m for the traditional methods. This characteristic makes it highly valuable in high-safety-demand fields such as navigation in server underwater environments.
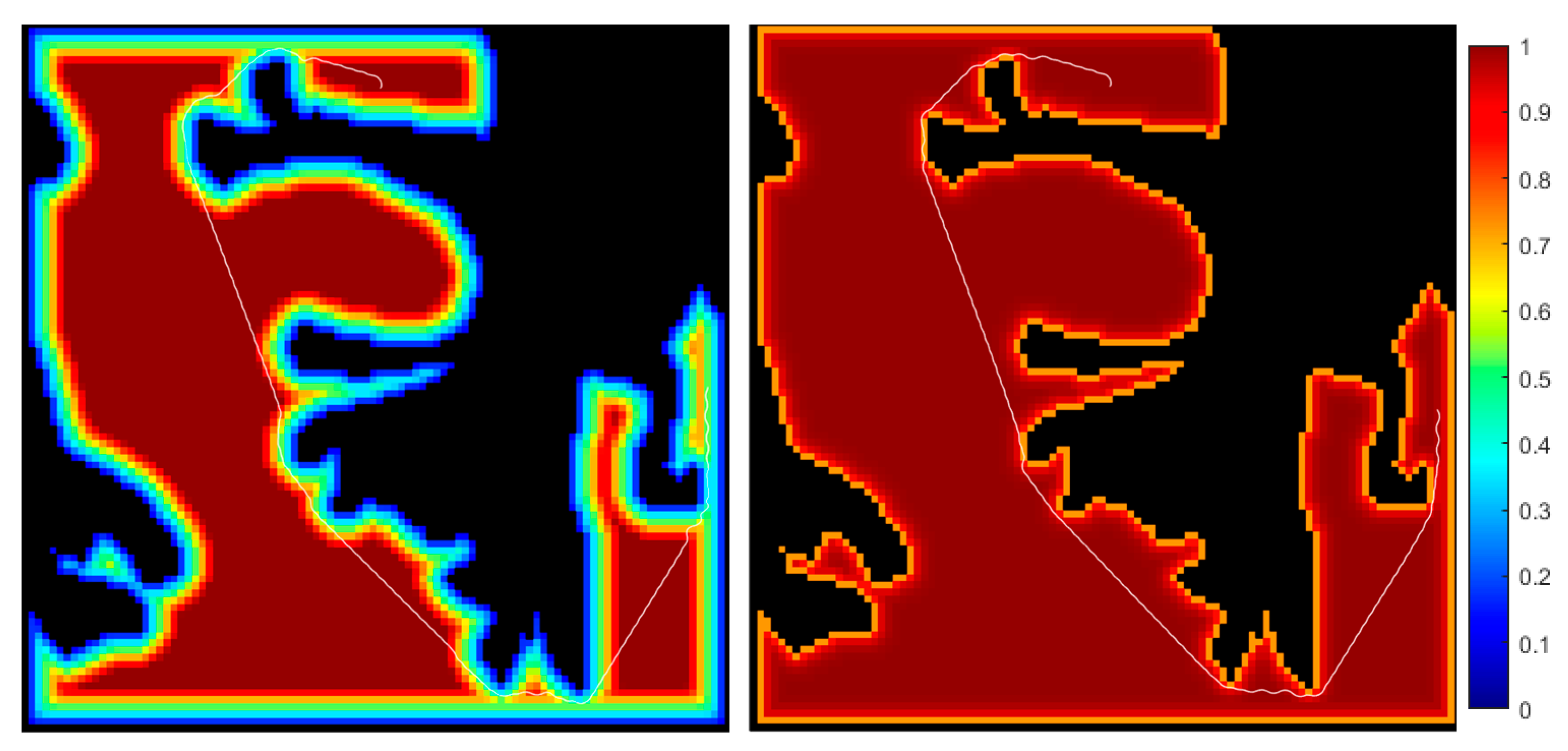
Moreover, both MPC-APFCBF and MPC-FMCBF plan at the speed level. The left image of
Figure 8 shows the planning results and the pseudo-color map of the barrier function field for MPC-FMCBF, while the right image of
Figure 8 shows the same for MPC-APFCBF. The barrier function field of MPC-FMCBF has a more extensive influence, allowing the path planning to maintain a greater safety distance from obstacles (minimum distance of 1.8583 m, compared to 0.9657 m for MPC-APFCBF), significantly enhancing path safety. Although the path length of MPC-FMCBF is slightly longer (195.2 m compared to 190.4 m for MPC-APFCBF), its smoothness and safety margin are higher, making it more suitable for complex environments. Additionally, MPC-FMCBF avoids the issue of being too close to obstacles seen in MPC-APFCBF, demonstrating higher robustness and reliability.
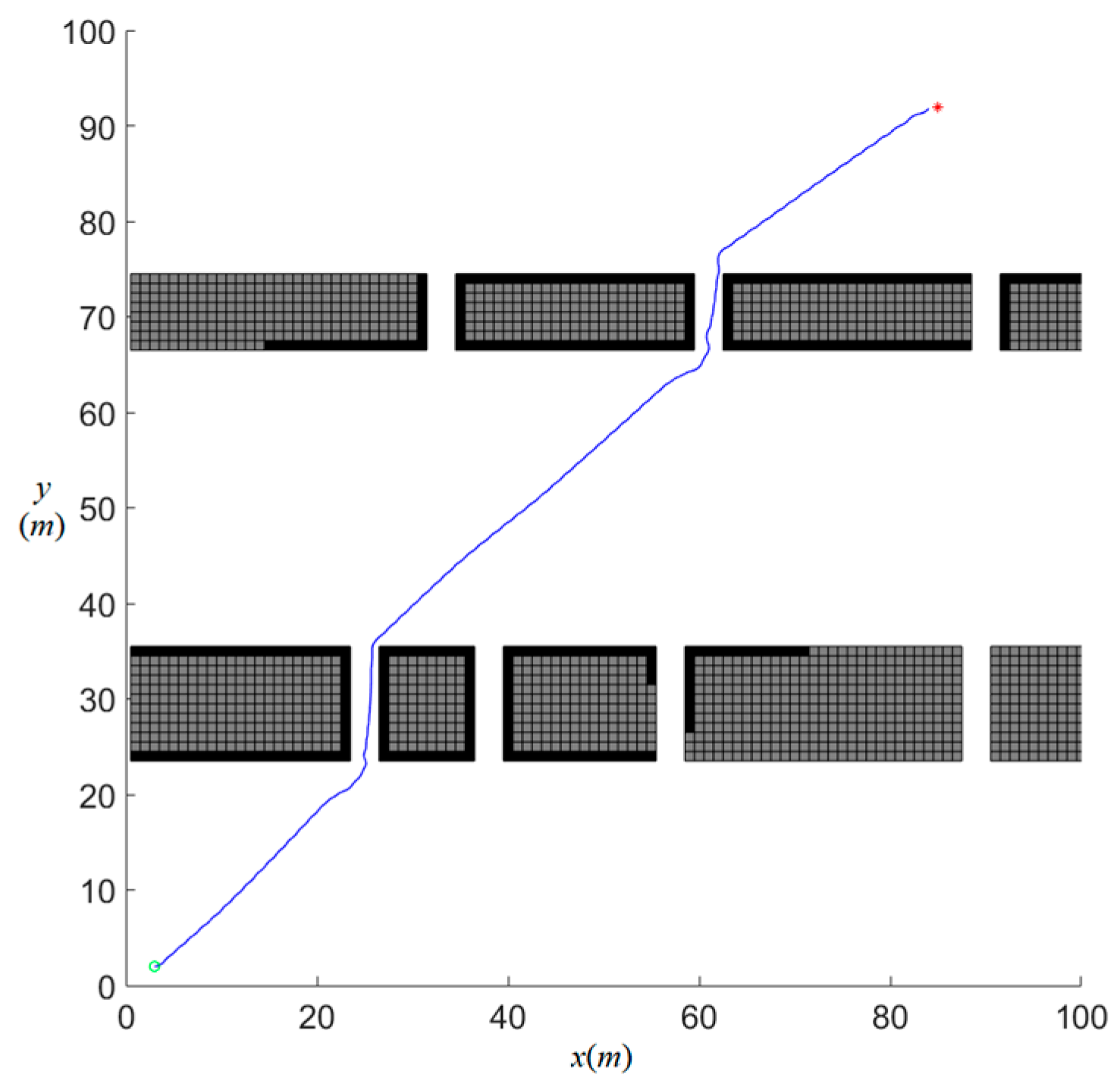
6.2. Local Motion Planning in Narrow Waterways
In a narrow waterway environment with artificial constructions, the AUV starts from position (3,2) and aims to reach position (85,92). The waterway features narrow channels with a consistent gap of 3 m, presenting a challenging scenario for motion planning and obstacle avoidance.
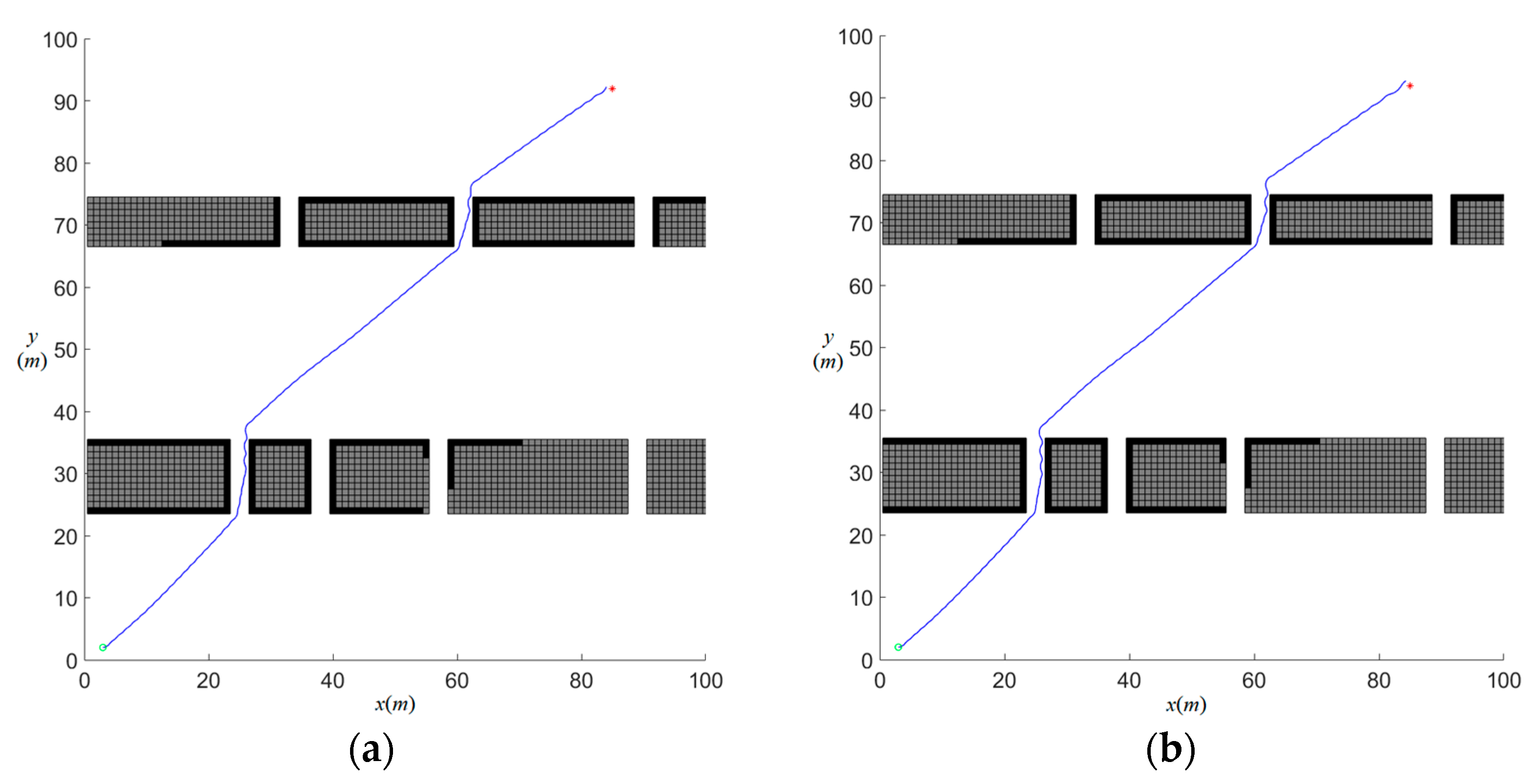
Figure 9 presents the results obtained by the proposed algorithm.
Figure 10 shows the results obtained by MPC-APFCBF and MPC-DC. In the figures, the green circle indicating the starting position and the red star representing the target position. Blue trajectories represent the AUV’s navigation path, while light and dark black dots denote unknown obstacles and detected known obstacles, respectively. The simulation results for local motion planning are illustrated in the three figures corresponding to the MPC-APFCBF, MPC-DC, and MPC-FMCBF algorithms. Initially, the AUV operates with no prior environmental knowledge, initiating motion planning using all three methods. The MPC-APFCBF [
27] and MPC-DC (distance constraint) [
24] algorithms exhibit nearly identical planning behaviors, with the control barrier functions of MPC-APFCBF failing to demonstrate effective obstacle anticipation. Both methods trigger abrupt turns only when the AUV is close to obstacles, resulting in trajectories marked by frequent directional fluctuations and poor smoothness. In contrast, the proposed MPC-FMCBF algorithm proactively adjusts the path to maintain a safer distance from obstacles, enabling near-linear navigation through narrow channels. This anticipatory behavior stems from the enhanced control barrier function design, which integrates fast marching-based distance fields to preemptively reshape the trajectory while ensuring minimal path deviation. The comparative results highlight MPC-FMCBF’s superior ability to balance safety and efficiency in cluttered environments.
Furthermore, the MPC-FMCBF framework achieves a minimum safety distance of 0.48 m, significantly outperforming MPC-APFCBF and MPC-DC, which achieve only 0.20 m. The primary factors affecting local motion planning include the sensing range of the sonar and the parameter . Hardware limitations constrain the sensing range of the sonar, and setting it to 30 m is reasonable and aligns with practical scenarios. Therefore, a study on the influence of the parameter was conducted. Based on simulation results, the impact of can be summarized as follows: as increases, the safety distance decreases. When , the safety distance in this narrow navigation channel is 0.48 m. When = 0.15, the safety distance in the same channel decreases to 0.29 m. At = 0.35, the results become nearly identical to those of MPC-APFCBF, as the lack of early obstacle avoidance leads to multiple sudden turns and a further reduction in the safety distance to 0.20 m.
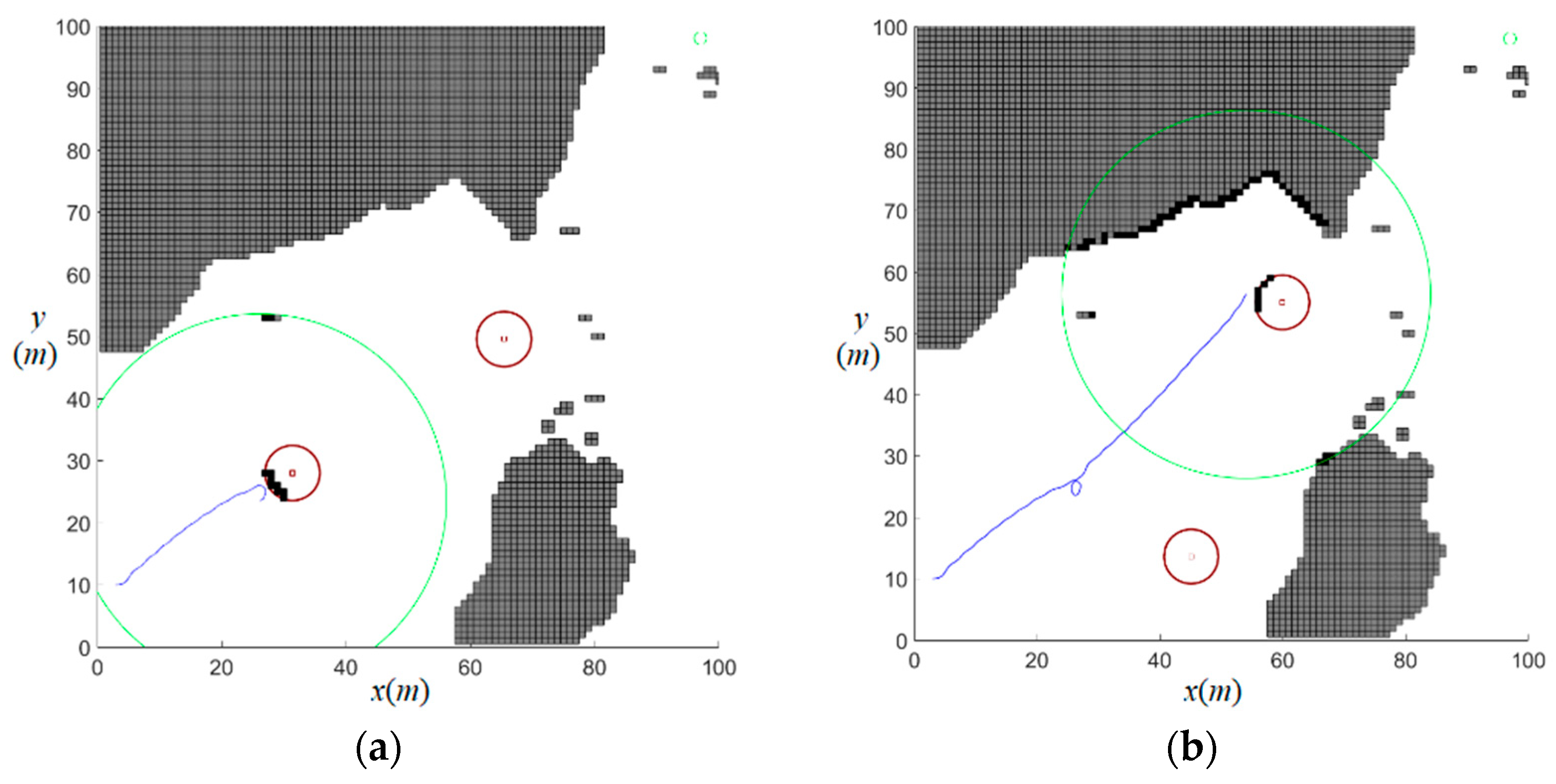
6.3. Local Motion Planning in Environments with Dynamic Obstacles
A comprehensive simulation study was conducted to evaluate motion planning performance for an AUV navigating from (3,10) to (97,98) within a 100 m × 100 m dynamic environment containing moving obstacles. Two moving obstacles are set in the simulation represented by red circles in
Figure 11 and
Figure 12. The speed vectors of the moving obstacles are set to [−0.2, 0.2] m/s and [0.5, −0.525] m/s, representing their velocities in the
x and
y directions, respectively.
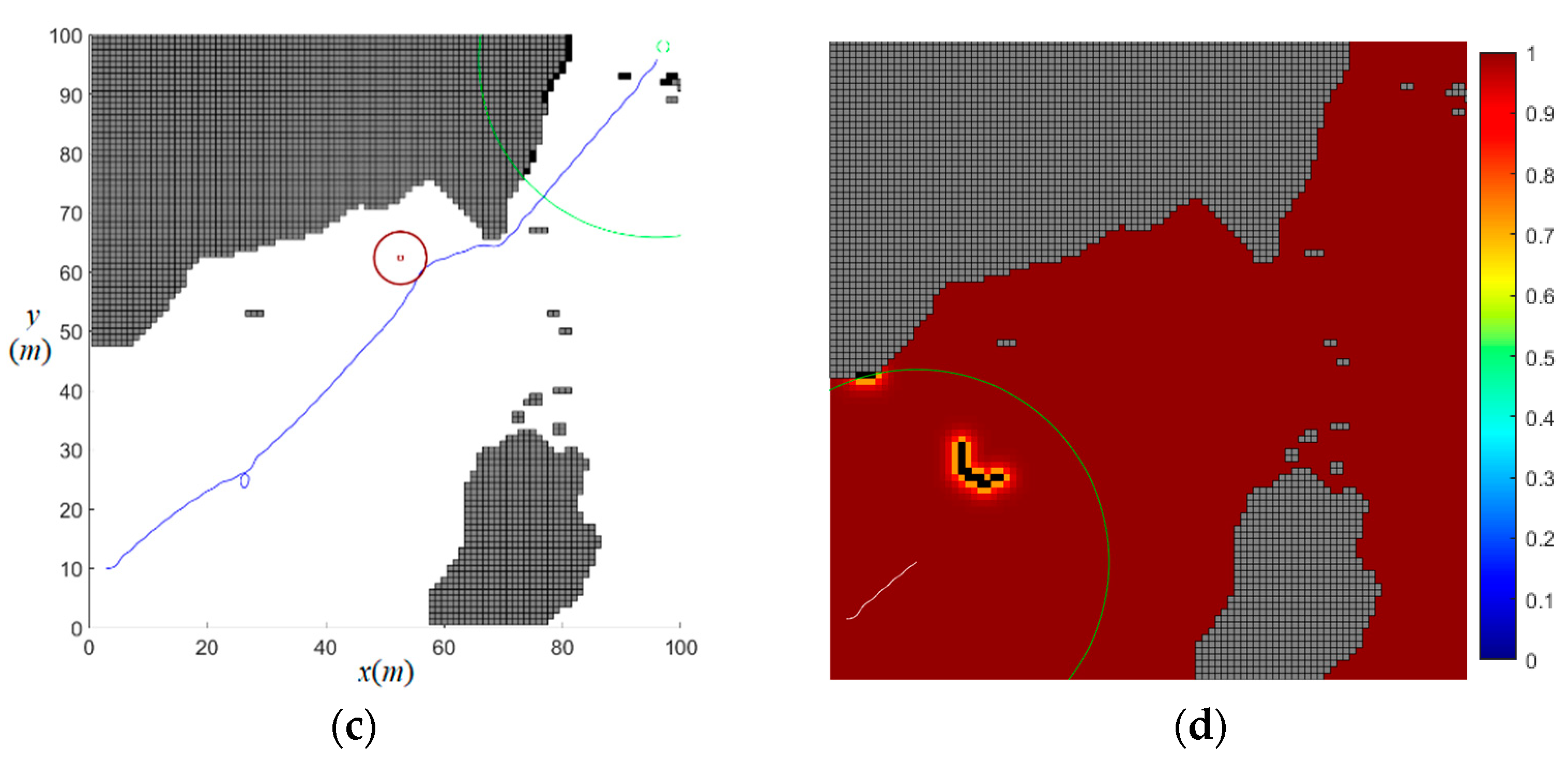
Figure 11 and
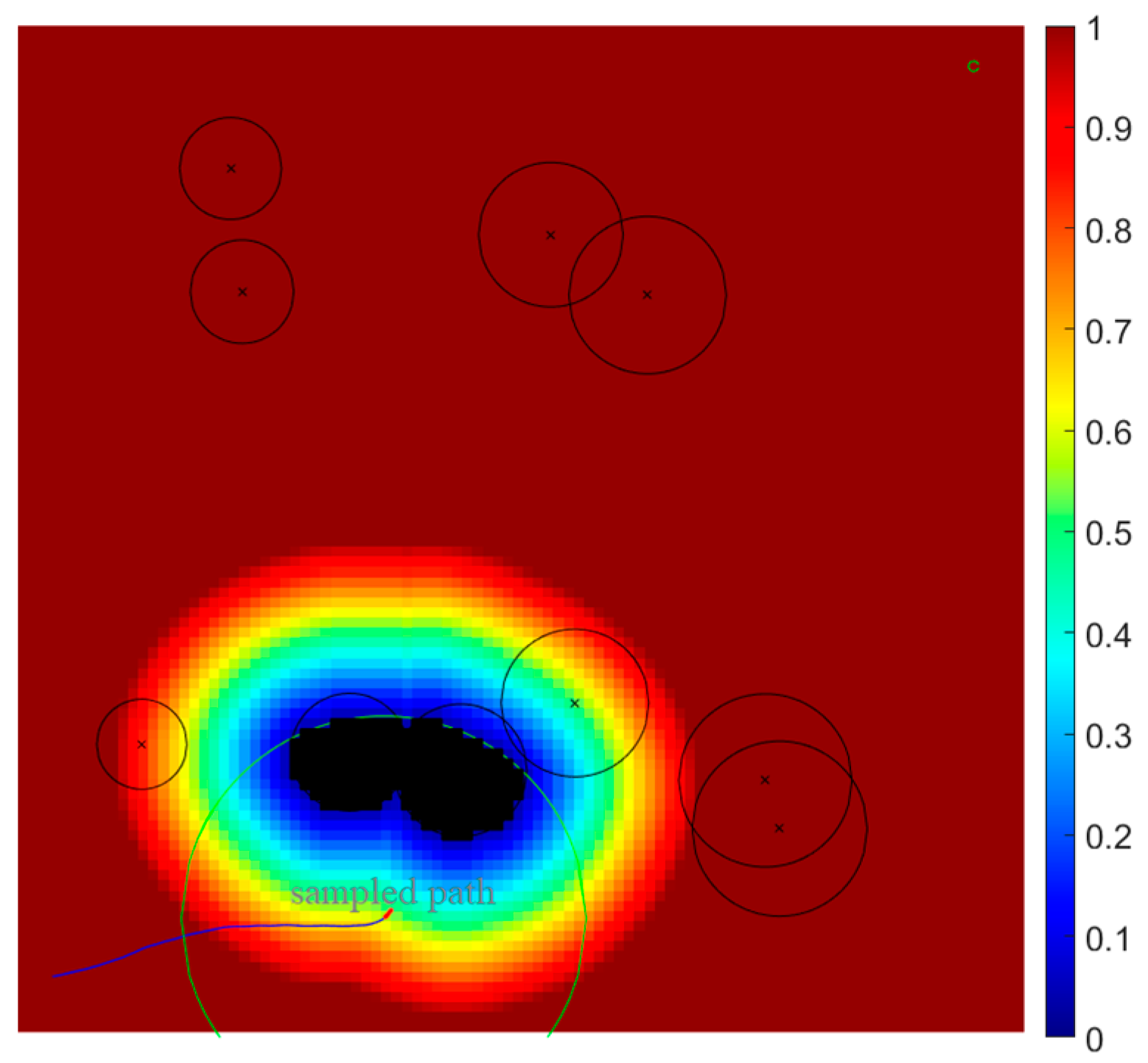
Figure 12 present the comparative motion planning results using MPC-FMCBF and MPC-APFCBF in dynamic scenarios. In the figures, the big green circles indicate the detection region of the AUV’s sonar, and the small green circles denote the target position.
Figure 11d illustrates the control barrier function field for dynamic obstacles computed through the FM algorithm. The proposed MPC-FMCBF algorithm enhances obstacle avoidance by strategically increasing grid velocity in the direction of obstacle movement during FM-based distance computation, thereby reducing effective distance values and extending the propagation range of the truncated barrier function field. This innovative approach enables earlier detection and more effective avoidance of moving obstacles.
In contrast, the MPC-APFCBF algorithm’s control barrier function exhibits limited influence, primarily affecting only the immediate grid surrounding the obstacle (as shown in
Figure 12d).
Figure 12a demonstrates that the AUV using MPC-APFCBF initially moves directly toward the moving obstacle without proactive avoidance, executing abrupt turns only at proximity, which poses significant safety risks in practical applications. While the MPC-FMCBF planned trajectory requires 100.22 s compared to MPC-APFCBF’s 95.96 s, it maintains a safer minimum obstacle distance of 1.76 m versus MPC-APFCBF’s precarious 0.13 m clearance, which nearly results in collision.
In summary, the framework maintains a minimum safety margin of 1.76 m in dynamic scenarios, compared to 0.13 m for MPC-APFCBF, which nearly results in collisions. The comparative results underscore MPC-FMCBF’s exceptional safety performance in dynamic environments, showcasing its unique ability to harmonize path efficiency with robust collision avoidance capabilities, even with marginally increased navigation durations. This strategic trade-off is well-justified by the algorithm’s substantially enhanced safety margins and proactive obstacle anticipation, establishing MPC-FMCBF as the preferred solution for real-world AUV deployments where operational safety constitutes the highest priority. The algorithm’s design philosophy prioritizes guaranteed collision-free navigation over minimal time optimization, aligning perfectly with the critical safety requirements of autonomous underwater operations in complex, unpredictable environments.
Finally, an in-depth analysis of the proposed algorithm’s computational complexity and parameter uncertainty tolerance will be conducted. In terms of computational complexity, the algorithm primarily depends on the FMM and the prediction and optimization steps in the temporal domain during the rolling optimization process of MPC. Assuming the environmental map size is d × d grid cells, the time complexity of the FMM algorithm is O (d2log(d)). This study employs “fmincon-sqp” as the optimization solver, whose typical time complexity is O (k(n2 + m3)), where k represents the number of iterations (usually less than 100 in the motion planning optimization problem of this study), n is the number of variables (set to 2), and m is the number of constraints (set to 4). Therefore, for the optimization problem in this study, the time complexity of the optimization solver is relatively low, and the overall computational complexity of the algorithm mainly depends on the execution efficiency of the FMM algorithm.
In terms of robustness, the algorithm demonstrates excellent performance. By adopting a robust MPC framework, only the kinematic model of the AUV is considered during the motion planning process, effectively avoiding the impact of AUV dynamic parameter uncertainties on the planning results. This design strategy significantly enhances the algorithm’s adaptability to system parameter variations, ensuring the reliability of the planning scheme in practical applications.
7. Conclusions
This study proposes a robust Model Predictive Control (MPC) framework for Autonomous Underwater Vehicle (AUV) motion planning in complex environments. The framework integrates a Fast Marching (FM)-based Arrival Time Map and an enhanced Obstacle Avoidance Map, which strategically increases grid propagation speed in the direction of dynamic obstacles, thereby extending the influence of barrier constraints. Extensive simulations demonstrate the framework’s effectiveness in ensuring collision-free navigation and timely target achievement in scenarios involving static and dynamic obstacles, as well as narrow channels. These results highlight significant advancements in AUV safety and operational efficiency.
However, several challenges remain unaddressed. First, the computational scalability of the algorithm needs further optimization to support real-time applications in large-scale environments. Second, the framework currently assumes perfect knowledge of dynamic obstacle trajectories, leaving uncertainties in real-world scenarios unaddressed. Third, the study lacks experimental validation, as the results are based solely on simulations.
To address these limitations, future work will focus on three key directions: (1) enhancing robustness to environmental uncertainties, particularly in dynamic obstacle prediction and sensor noise; (2) conducting field tests to validate the framework’s performance in real-world underwater environments; and (3) integrating advanced perception systems, such as machine learning-based sensors, to improve obstacle detection and avoidance capabilities. These efforts aim to bridge the gap between simulation and practical deployment, further advancing the applicability of the proposed framework in real-world AUV operations.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}