1. Introduction
Rapid and constant advancements in Unmanned Aerial Vehicles (UAVs) have revolutionized numerous industry sectors such as agriculture, logistics, monitoring, and surveillance. UAVs are increasingly being relied upon for their ability to perform tasks that are too dangerous, costly, or inefficient for humans to perform, such as inspecting hazardous sites, delivering goods to remote locations, and monitoring large outdoor areas or indoor spaces, e.g., warehouses or parking garages. This reliance is due to the unique capabilities of UAVs, including their versatility and adaptability. As tasks for UAVs become more complex and important, UAVs need to be constantly upgraded and kept up to date. Accurate positioning is essential for tasks like autonomous navigation and obstacle and collision avoidance, particularly in environments where reliable Global Positioning System (GPS) signals, or signals from other satellite navigation systems, are weak or unavailable, such as indoor spaces, urban areas, and dense forests. Current localization techniques can be broadly categorized into visual-based, radiofrequency (RF), and IMU-based techniques, each with its own advantages and limitations. GPS is the main localization technique for UAVs because of its ease of use, global coverage, and continuous availability, with an expected accuracy of less than a few meters. Since GPS is easily implemented in UAVs, new localization techniques mostly tackle the issue of localization in GPS-denied areas. However, for UAV swarm missions and tasks, relying solely on GPS is dangerous due to the need for centimeter-level precision, which GPS cannot provide. One of the focuses of this paper is to explore the state-of-the-art in the relative localization of UAVs in swarms, which needs to meet the required positioning accuracy. Visual sensors, including LiDAR, RGB, and IR cameras, provide high accuracy and a detailed view of surroundings but are heavily influenced by similar surroundings, are computationally intensive, or are too expensive and bulky for UAVs, which are limited payload-wise. IMU-based techniques are useful for short-term motion estimation but tend to accumulate errors over time, making them unreliable for long-term localization. RF techniques, like Wi-Fi and Bluetooth, mostly suffer from their limited range and signal interference. With the aforementioned limitations and tasks in mind, ultra-wideband (UWB) technology stands out due to its potential to offer highly accurate and reliable localization. UWB technology differentiates itself from other RF methods, such as Wi-Fi and Bluetooth, by being resistant to multipath and other signal interferences while maintaining low power consumption like its RF counterparts.
Relative UAV localization consists of several complex fields, including signal processing, robotics, automation, computer vision, and wireless communication, each requiring a deep understanding to accurately assess the potential of different localization techniques. Secondly, the rapidly evolving nature of UAV technology and localization methods, followed by an increasingly large number of published papers, makes choosing adequate papers as the information source rather challenging. Despite the numerous studies on UAV localization, there is a notable gap in research focusing on the integration of RF methods with GPS, even though existing studies indicate promising results. This is one of the main reasons for conducting this literature survey, as the current trends are localization in GPS-denied areas and visual-based localization.
This survey paper aims to explore the various short-distance localization technologies available for UAVs, evaluate their strengths and weaknesses, and highlight the unique advantages of different approaches. By providing a detailed comparative analysis, this paper will argue that UWB technology is one of the most effective solutions for short-distance UAV localization, offering a reliable foundation for future advancements in this rapidly evolving field. The main literature sources are papers with a good citation record that were published within the 5 years prior to the moment of writing, as well as some older papers covering the basic principles of certain mentioned methods. This comprehensive analysis is intended to assist researchers, developers, and industry professionals in making informed decisions about the best short-distance localization technologies for their specific UAV applications.
Figure 1 shows a graphical overview of designing a short-distance localization system for UAVs, which is covered by this literature survey.
The rest of the paper is structured as follows. In
Section 2, we will provide an overview of the UAVs capable of carrying different sensors. In
Section 3, we will briefly cover data fusion and localization techniques.
Section 4 introduces UWB technology as a localization tool.
Section 5 presents applications and indoor localization through UWB technology. Finally,
Section 6 presents the conclusive remarks and guidelines that came as a result of this survey, which could be of benefit to researchers in the field of UAV localization.
2. Overview of the Requirements for UAVs and Sensors
In this section we will provide an overview of the terms and the essential concepts necessary for understanding different localization technologies used in UAVs. We will explore the general requirements and discuss the advantages and limitations of each method.
2.1. General Requirements
UAV systems need to be optimized regarding the limitations in the payload they can carry and their limited battery life. This is especially true for the UAV systems used for emergencies and time-sensitive tasks, e.g., airstrip inspections. Simple and non-urgent missions require a lower level of reliability and quality than those missions that have a high financial or life-saving impact.
Accuracy: Accurate localization is necessary for almost all UAVs to successfully perform missions. Accurate localization is also very important for safety, as there are many no-fly zones in which UAVs are not allowed. Locations of these zones are usually stored in the UAV’s onboard computer so it can avoid them in autonomous flight or override users’ control when entering such zones. On the other hand, UAV swarms require centimeter-level accuracy to maintain formation and avoid collisions.
Robustness: Localization systems must perform reliably under varying environmental conditions, such as changes in lighting, weather, and terrain. They should also be resistant to interference from other signals and, if used in urban areas, capable of operating in GPS-denied environments.
Real-time capability: Similarly to accuracy, this highly depends on the use-case of a UAV. For fast-moving and agile UAVs, low latency in determining the location is of great importance, especially in swarm formations.
Range: The effective range of localization systems must be sufficient for the intended UAV operations. GPS is not range-limited in open environments, but most other localization methods suffer from low resolution or signal fading.
Power consumption: Since UAVs often have limited battery life, the power efficiency of the used localization technology is critical.
Scalability: With the increasing number of UAV systems consisting of multiple aircraft, the scalability of localization systems became another requirement for such systems.
Designers of UAVs have to balance the trade-off between these requirements and find the optimal solution for the mission at hand. The first and most used localization technology is GPS, which is often the primary or the only navigational sensor on UAVs. GPS ticks off almost all the boxes in requirements with a decent accuracy of a few meters, continuous availability, real-time location, limitless range, and low power consumption. On the other hand, its accuracy is not satisfactory for missions requiring centimeter-level accuracy or for controlling swarm formations. As the authors in [
1] concluded, the accuracy of location estimation using GPS sharply drops in closed spaces and urban environments. Because of these reasons, there is a need to supplement GPS with other navigational sensors, such as visual, IMU-based, or radio frequency sensors.
2.2. Sensors
UAVs are usually equipped with many sensors serving different purposes with regard to the use-case of a UAV. There are three large groups of sensors capable of helping in relative localization. These are visual sensors, IMUs, and RF sensors. Most UAVs, designed to fly in outer environments, use satellite-based navigation, which will not be discussed in this study.
2.2.1. Visual Sensors
Visual sensors used for navigation and localization of UAVs are usually RGB cameras, IR cameras, and LiDARs. They are a very capable solution for that purpose [
2,
3] and are also useful for 2D imaging or advanced 3D mapping, where they present a lucrative solution. Still, visual sensors are best used in combination with other navigation and localization methods, most notably GPS.
RGB cameras are the most common type of visual sensor used in UAVs. Su et al. [
4] presented a simple and robust method for indoor localization using IMU and a single RGB camera. They “taught” the UAV its flight path manually, and later, the UAV could follow its flight path by recognizing the recorded images during the manual flight. This presented a limitation in the usefulness of this method in unknown environments. The authors observed an estimation error that occurs when the UAV is in front of a complex environment, e.g., trees, which is a recurring problem with RGB cameras. Complex environments, motion blur, and sudden lighting changes present a significant challenge for this solution. RGB cameras can also be used in pairs to obtain a stereo view, providing the capability of determining the distance between a UAV and surrounding objects. Janousek and Marcon [
5] presented a visual relative localization system suitable for UAVs, using a state-of-the-art convolutional neural network (CNN) for detecting objects in images, which was trained to detect UAVs. A directional vector, originating from the camera to the detected UAV, is obtained using camera projection, and the distance of the UAV is estimated from the size of the detected bounding rectangle, which is output from the CNN. The direction and the distance together give the position of the detected UAV relative to the camera.
IR cameras are mostly used for night vision and thermal imaging and are usually combined with reflective markers positioned on UAVs to make them easier to detect. The authors in [
4] completed simulations in the Gazebo simulator [
6], in which they accomplished a successful pose estimation and UAV identification by using a combination of RGB and IR cameras. UAVs almost exclusively use IR cameras as an aid in precise landing [
5,
7]. Kalinov et al. [
7] used the IR camera as a tool for precise landing on a small 30 cm × 30 cm platform, relying on GPS to guide the UAV above the landing platform, where the IR camera was able to detect an IR light-beam emitted from the platform.
A LiDAR is used for high-precision distance measurements and for creating detailed 3D maps of an environment. In a controlled environment with open space and walls, the authors in [
3] achieved a successful autonomous flight through a simple maze using LiDAR in combination with the IMU. Zhang et al. [
8] proposed a localization technique that uses inertial data from IMU and three-dimensional data obtained by the LiDAR. The technique used the inertial data to acquire the UAV’s attitude, while the position was recursively updated by using the scan matching approach, resulting in successful navigation through a simple maze.
2.2.2. Inertial Measurement Units
IMUs are an essential part of the navigation and control systems of UAVs. They act as autonomous localization systems capable of determining the orientation, velocity, and position of a UAV. They usually consist of an accelerometer, which measures acceleration along the three axes; a gyroscope, which measures the rate of rotation along the three axes; and, sometimes, a magnetometer, which determines the UAV’s heading relative to Earth’s magnetic field. IMUs are usually combined with other sensors, which are able to provide relative or absolute location; for example, in [
9], where the authors used a combination of an IMU and a UWB as a distance-measuring tool for indoor localization. They set up three UWB sensors at the bottom corners of the room (anchors/nodes), with the additional sensor placed above the “middle” sensor on the floor. They based the sensor fusion on the Unscented Kalman Filter (UKF) and succeeded in reducing the accumulated error, which is the IMU’s biggest issue. When integrated with other sensors, IMUs greatly enhance the capabilities of UAVs, enabling them to operate effectively in a wide range of environments and applications. Despite the previous claim, the authors in [
8] proposed a localization technique that only uses several IMUs and obtained very good results, concluding that the increased number of IMUs increases the accuracy of position estimation.
2.2.3. RF Sensors
Unlike visual sensors, which rely on optical data, RF sensors use wireless signals to determine the UAV’s position and orientation, offering unique advantages, such as the ability to operate in complex environments, including those with poor visibility or with no available GPS signal. In this section, we will try to present the possibilities of localization using different RF technologies, including Bluetooth, Wi-Fi, and UWB.
Bluetooth is a widespread, short-range, wireless communication technology, mostly used to transmit data, but it has been adapted for UAV localization by using the Received Signal Strength Indicator (RSSI), the Angle of Arrival (AoA), and the Time of Flight (ToF). Zhou et al. [
10] used the RSSI obtained from Bluetooth transceivers to improve the UAV’s position, which was previously determined exclusively using GPS. Bluetooth became an attractive option for localization systems due to its availability, low cost, energy efficiency, and capability to support high device density, which is useful for UAV swarms. Ariante et al. [
11] presented a Bluetooth-based indoor localization system with a localization error of 20 cm in a simple environment. This method uses the RSSI from three different transceivers and obtains the distance by trilateration, but the ability of this system is not suitable for more complex environments, which contain obstacles and provide attenuation of a propagated signal, influencing the RSSI value. Sollie et al. [
12] used the AoA for outdoor navigation of fixed-wing UAVs. The presented Bluetooth module consists of 12 patch antennas in the square pattern of 15 cm × 15 cm, with a 5 cm spacing between antennas. The proposed system has a long range of 700 m, making it one of the RF systems with the longest reach. On the other hand, this system can only be used on a large enough UAV capable of carrying this complex antenna system.
Wi-Fi is another widespread wireless communication technology, mostly used to transmit data, but it can be used to perform relative localization. It shares some attributes with Bluetooth, including the ISM frequency bands (2.4 GHz and 5 GHz) and the preferred localization method, trilateration, with the RSSI as a marker for measuring the distance between transceivers. Its main advantage is the existing infrastructure, which UAVs can use for localization. Xue et al. [
13] presented a new RSSI extraction algorithm used in Wi-Fi localization, which improved the performance of previous algorithms based on the RSSI. The authors achieved so by using the maximum RSSI value instead of the mean RSSI value, as it is skewed in indoor areas because of multipath. This paper shows that, despite its flaws, the RSSI-based algorithms can be useful for Wi-Fi localization. Pagliari et al. [
14] compared the accuracies of two different methods for Wi-Fi localization, one being a fine time measurement and the other being RSSI-based. The provided results show that both methods can achieve an accuracy of around 30 cm. The authors also mention the need for a sensor fusion and a possible combination of sensor outputs with UWB measurements. Some other RSSI-based approaches include the utilization of the Multiple Input Multiple Output (MIMO) concept in UAV navigation, where individual UAVs are connected to a massive MIMO base station, and each UAV is equipped with a single antenna [
15].
UWB is a wireless communication technology that utilizes a wide frequency spectrum to transmit and receive signals. Unlike Bluetooth and Wi-Fi, UWB signals use extremely short pulses, typically in the order of nanoseconds. The short duration of pulses requires usage of a wide frequency range and offers UWB technology an upper hand in comparison to Bluetooth and Wi-Fi by making the UWB signals more resistant to multipath and RF interference. Most researchers are focused on finding alternative localization methods in GPS-denied areas, while currently, not many researchers are using RF methods for supplementing GPS. This is mostly implemented in ground vehicles [
16], but shows potential in increasing the localization accuracy by augmenting GPS with UWB [
17].
3. Data Fusion and Localization Techniques
The previous section dealt with various types of sensors that allow UAVs an absolute or relative positioning. Those sensors have different limitations and are sensitive to different physical manifestations because they measure very different values. Flight controllers of UAVs have to estimate the exact position according to those measurements, and that task is all but trivial.
3.1. Sensory Data Fusion
In the process of the integration of sensory data, researchers used many different (non)linear filters for the purpose of state estimation. Depending on the scope of the research, many relied on the Kalman Filter (KF) [
18] and the Extended Kalman Filter (EKF) [
19] because the EKF is already implemented in one of the most used open-source flight controllers—Pixhawk [
20]. With the limited computational resources and requirements for real-time output, it is necessary for a system to provide a quick response, and one way is to linearize a nonlinear system [
19], as shown in
Figure 2.
As mentioned before, sensors onboard a UAV, which are used to estimate the attitude, position, and velocity, tend to collect data with high levels of noise, which can be tackled by adaptive complementary filters [
21]. The UKF was used by Bonyan Khamseh et al. [
22] to address a physical interaction of the UAV with the environment, for which usage of the EKF is not entirely suitable because the quadcopter and its manipulator are two different systems that exhibit high nonlinearity. Some novel approaches in sensor fusion use machine learning techniques, which are well summarized by Fayyad et al. in [
23]. An example of a deep-learning-based attitude estimation was proposed by Al-Sharman et al. [
24], where the authors trained a deep neural network to identify the associated measurement noise models and filter them out. The fusion of sensory data and state estimation, being a complex filed in automation systems, would require a larger overview, and the following sources systematically deal with this topic [
25,
26,
27,
28,
29].
3.2. Localization Techniques
In this sub-section, we will provide a low-level technical overview of how visual, RF, and inertial methods are used to measure distance and localize UAVs.
Visual localization relies on cameras and other optical sensors to acquire information about the environment and provide distance measurements. There are different approaches in terms of the type and number of sensors used and processing methods. Stereo vision, by using a pair of RGB cameras, mimics the human depth perception. Each camera captures images from different viewpoints, and the distance from an object is estimated after creating a 3D map of an environment. A 3D map is constructed by calculating the disparity for several corresponding points, enabling a computer to construct the necessary 3D map. Monocular vision, with depth estimation, uses a single camera to estimate the distance from an object, usually by analyzing the motion of objects in an environment. This process is less accurate than stereo vision because it relies heavily on the UAV’s movement and known reference points. Another approach in monocular vision for depth estimation is the usage of machine learning models trained on vast datasets to estimate distance from a single image. This approach provides better results but is computationally intensive and usually unreliable in complex environments.
Besides the estimation of the position based on the analysis of still images and pairs of images, a mention-worthy approach is the optical flow, which estimates the motion of objects in an environment based on sequential images captured by the same camera. By calculating the apparent motion between two consecutive frames, the system can infer the speed and direction of both the UAV and surrounding objects. Optical flow-based localization often relies on IMU data and can be used as a pseudo-stereo vision. It is especially useful for depth perception and is implemented in autonomous UAV landing systems. A stereo vision based on optical flow offers higher precision, as the authors in [
30] showed. They obtained promising results, outperforming GPS, and are confident that the system can be improved further.
Among the RF-based techniques, the Received Signal Strength (RSS) is a common, cost-effective, and easy-to-implement method but faces challenges such as signal attenuation and multipath effects in complex indoor spaces [
13]. The Angle of Arrival (AoA) method determines the angle at which a signal is received by using multiple antennas. It provides high accuracy at short distances but suffers from decreased performance at longer distances due to errors in sensitive angle measurement. The RF modules, which use the AoA, require larger UAVs due to their need for multiple spaced-out antennas. Nguyen et al. [
31] used the AoA with signal analysis to determine the direction from which an unauthorized UAV is approaching a certain area. The AoA is often used with the RSSI to increase the obtained accuracy, as shown by Zhu J. Yan [
32]. The basic properties of signal propagation allow measuring the time of arrival (ToA) by placing the target on a circle with a diameter equal to the product of the speed of light and the time between the transmission and the reception, but it requires having a perfect synchronization between receivers and transmitters. The received signal
r(
t) differs from the transmitted signal not only in the time shift but in the shape as well because of the channel characteristics and incorporated noise [
33]:
where
τ represents the ToA,
α is the channel coefficient,
s(
t) is the transmitted signal, and
n(
t) is the white Gaussian noise with a zero mean and the spectral density of
N0/2. The distance measurement on the receiver side is done through the correlation of the received signal with the signal template. The maximal output of the correlation function gives the time shift or the ToA. The Time of Flight (ToF) is similar to the ToA, except that the distance measurement is achieved by exchanging data packets with timestamps. The ToF also requires a receiver to sequentially send messages to transmitters, and that consumes a non-negligible amount of time in a larger system, making it not completely suitable for larger swarms. The time difference of arrival (TDoA) method determines the location based on the difference in propagation times from different transmitters. It requires precise synchronization, but unlike the ToF, where transmitters and receivers need to be synchronized, in the TDoA, it is only needed for either transmitters or receivers to be synchronized. Tiemann and Wietfeld [
34] presented a new approach to the TDoA method, having a reference node in a known position, with the task of improving the precision of time differences by knowing the distance to transmitters. Many studies were published with the goal of improving the performance of the TDoA and the ToF in UWB-based localization, which will be discussed later. A TDoA measurement relies on solving
N-1 equations obtained as differences in the distances that the signal travels from the same source toward two different fixed nodes:
where (
xm,
ym) are the known coordinates of the
m-th node, (
xn,
yn) are the known coordinates of the
n-th node, and (
xr,
yr) are the unknown coordinates of the rover (UAV).
Inertial localization relies on one or more IMUs, which measure the UAV’s acceleration and angular velocity. The core components of an IMU are accelerometers and gyroscopes, where accelerometers measure linear acceleration along the three axes (x, y, z). By integrating the acceleration data over time, the system can estimate velocity and position. However, due to noise and bias in the sensor, this integration leads to drift, causing the position estimate to become less accurate over time. Gyroscopes measure the rate of rotation around the three axes, and this information is used to track the UAV’s orientation (pitch, roll, and yaw). By integrating the angular velocity over time, a system can determine the UAV’s attitude. However, the same as accelerometers, gyroscopes suffer from a drift over time. To mitigate the drift and improve the accuracy of an IMU-based localization, algorithms for combining data from multiple sensors are used to produce an optimal estimate of the UAV’s position and velocity. They predict the UAV’s state (position, velocity, and orientation) and then update the prediction with the actual measurements, effectively reducing the impact of sensor noise and drift.
3.3. Comparison of Localization Approaches
For different use scenarios, the required accuracy is different, but it remains the fundamental requirement in UAV localization. GPS provides a global outdoor localization with a typical accuracy of a few meters. It lacks the accuracy for tasks demanding centimeter-level accuracy, such as autonomous UAV swarms. In indoor or urban environments, GPS signals degrade significantly, leading to sharp drops in accuracy, but it still is the only sensor that provides UAVs with an absolute position, which is important for avoiding no-fly zones such as airports and military bases. Among visual-based techniques, stereo vision can offer high accuracy by constructing 3D maps of the environment using RGB cameras. However, the performance of visual sensors degrades in challenging environments, such as areas with poor lighting, complex textures, or rapid movement, where motion blur can reduce their precision. While IR cameras are helpful in low-light conditions, their reliance on thermal signatures limits their application to scenarios where temperature contrast is significant. IMUs provide accurate short-term motion estimation, which is of great importance in environments where GPS signals are unavailable. However, they suffer from an accumulated drift over time. Without external corrections, the positional accuracy of IMUs deteriorates rapidly during prolonged missions. RF methods generally provide moderate accuracy, e.g., Bluetooth and Wi-Fi offer a localization accuracy of around 20 cm in optimal environments but suffer from signal interference and attenuation. UWB technology, on the other hand, delivers higher accuracy, with some systems achieving centimeter-level precision due to the use of a wide bandwidth, making it resistant to multipath and signal interference.
For general outdoor navigation, GPS remains a good option. In GPS-denied areas or swarm systems requiring centimeter-level precision, UWB transceivers and IR cameras offer the highest accuracy, each with its own strengths. UWB technology is easier and simpler to use, making it a more appealing option, and IMU-based methods are suitable for complementing other techniques but struggle with long-term precision.
Table 1 summarizes the different criteria that should be satisfied for choosing the optimal localization equipment.
Figure 3 presents a comparison of different localization approaches vs. the ground truth, details of which can be seen in Lin et al. [
35], where the authors presented the characteristics of the different localization techniques. The yellow, cyan, red, and blue curves represent the ground truth, UWB, Qualcomm Visual-Inertial Odometry (QVIO), and AprilTag localization trajectories, respectively.
4. Ultra-Wideband Communication as a Localization Tool
From the previous section, it can be concluded that indoor positioning requires the usage of dedicated equipment for different levels of achievable accuracy. The ultra-wideband communication technology presents one of the currently best approaches for indoor localization. It utilizes a wide frequency spectrum, from 3.1 GHz to 10.6 GHz [
36], to transmit and receive signals. UWB signals are characterized by an extremely short duration of pulses, typically in the order of nanoseconds, enabling a fine time resolution and resulting in high data rates and precise localization. UWB pulses have low power spectral density and the ability to resolve individual multipath components. Multipath components are still present in UWB technology, but because of the large bandwidth, they are easy to identify compared to narrow-band communications, as explained by Lee and Scholtz [
37]. The low power emission of UWB signals provides a low interference to other wireless communication systems. It is still a relatively new technology in the field of localization and navigation because it was initially developed for high data-rate communication.
Over time, advancements in UWB technology have led to its adoption in various applications, such as UAV swarm control and indoor navigation. An overview of the early development can be found in [
38]. During the early development of UWB localization systems, researchers were using many UWB modules from different manufacturers. Time Domains’ PulseOn UWB module was notably used in [
39,
40,
41] in combination with IMUs. The authors of these papers obtained a decent localization accuracy in the range of decimeters. The PulseOn module is best used with the TWR as a distance estimation method. BeSpoon UWB modules were briefly experimented with in [
42,
43], mostly because of a longer communication range than the competitive devices. However, they provided worse results than the other modules, and their superior range did not prove to be a worthy trade-off since the development of UWB localization technology headed toward implementation in small indoor spaces, collision avoidance, and precise swarm control. Tiemann and Wietfeld [
34] are the only ones to use the ATLAS UWB, which is designed for the TDoA method of distance estimation. Even though they achieved good results in [
34], and followed with similar results in [
44], the TDoA, as an estimation method, was not favored among researchers, especially in comparison to the TWR. The TDoA is slightly more accurate but requires precise anchor synchronization, which is not needed with the TWR. The most widely used UWB module is, for sure, the DWM1000 from Decawave/Qorvo, which is capable of TWR distance estimation [
45], the Double-Sided TWR [
46], and the TDoA [
47], each with accurate results. Tiemann et al. [
48] were the first, to our knowledge, to use Decawaves’ hardware for real-world experiments in the localization of UAVs. They used the TWR for distance estimation and a rejection algorithm for measurements in non-line-of-sight (NLOS) conditions. In this way, the authors obtained an average error of around 20 cm. Decawave published detailed specifications for the DWM1000 module, which enable researchers to simulate its behavior like the authors in [
49] did using the ToF measurements. Most of the studies mentioned in this section implement the EKF for state estimation. Nguyen et al. [
50] were among the first ones to improve upon the EKF by introducing a nonlinear regression model for initialization of the EKF. Güler et al. [
51] were the first to simulate multiple UWB modules on a single UAV to localize a UAV using another UAV. This research paved the way for UWB technology as an aid in autonomous landing on mobile platforms equipped with UWB anchors. The authors obtained higher errors due to the close placement of the UWB modules on the UAV. Because of the UWB technology’s limitations in localization systems, which require high precision and reliability, IMU is often used in combination with UWB transceivers. Zahran et al. [
52] provided the results containing only an IMU and a micro radar, only a UWB transceiver, and a combination of both. The result was expected, as the IMU and UWB combination provided the best accuracy and reliability.
4.1. State-of-the-Art Use of UWB Communication
By exploring the latest advancements, in this section we will provide a comprehensive overview of UWB technology’s unique capabilities, its implementation challenges, and its performance in scenarios requiring high precision, such as indoor navigation, swarm control, and autonomous landing. Mostly, the studies from 2019 onwards will be considered as they were within the 5 years prior to writing this survey. Lately, there has been an increase in the amount of research focusing on reducing the NLOS and multipath errors of the UWB technology in localization systems by introducing machine learning, deep learning, and filtering algorithms, which will be addressed separately. Hardware-wise, Decawave’s DWM1000 is a clear favorite among the UWB transceivers, being used almost exclusively in the majority of cases, even though Decawave, as part of Qorvo, Greensboro, NC, USA, currently manufactures its successor, DWM3000. DWM1000 is often used with STM32-based microcontrollers, and the double-sided two-way ranging (DS-TWR) method is the most used technique for obtaining distance measurements because most studies use a small number of UAVs and, therefore, do not create much UWB data traffic. There are papers focusing on reducing this data traffic to potentially scale up their projects in the future rather than switching to the TDoA, which requires precise clock synchronization but uses fewer data packets.
4.2. Autonomous Landing/Node Finding
Nguyen et al. [
53] used UWB technology to aid visual-based docking in the approach phase, which lasts until the visual sensors recognize the markers on the landing pad. The UWB anchors were placed in the corners of the landing pad, which has a size of 2 m × 1.5 m. Due to the small available indoor area, the landing pad was static, and the average positioning error was around 20 cm, which was adequate for the docking operation. They managed to make the UAV successfully land on a moving landing pad each time. The authors also conducted long-range autonomous docking in which the UAV successfully landed on a static landing pad 50 m away. This paper is a great example of how UWB technology can be used to aid other sensors in docking and landing.
The authors in [
54] presented another interesting approach to autonomous UAV landing. Knowing that altitude sensors are universally accepted as the go-to sensors for UAV landing, the authors decided to rely only on UWB technology and the IMU for autonomous landing. The presented novelty in the approach is in placing two tags on the UAV, which enhances position accuracy. The UAV landed on a 2 m × 2 m landing platform equipped with four and eight UWB anchors. The experiments with eight anchors confirmed that the accuracy rises as the number of anchors rises. Despite this, larger errors still occurred for the UAVs reaching accelerations higher than 1 m/s
2. The IMU increases the accuracy of distance estimation regardless of the UAVs’ acceleration with the RMSE of 20.8 cm.
Zeng et al. [
55] used two UWB tags on UAVs similar to the authors in [
54]. They fused IMU and UWB data and experimented with portable landing pads equipped with four anchors in the corners of the pad. During the experiments, the authors obtained a RMSE of 16.7 cm, which is significantly lower than the RMSE for a single tag, which was 42.6 cm. This work differentiates from [
54] by the usage of the gradient descent method to obtain the coordinates of two UWB tags and then by feeding the coordinates into the EKF. With more than one study achieving good results for IMU-aided UWB landing, this method shows potential for future research.
Xianjia et al. [
56] also experimented with fused visual, IMU, and UWB peer-to-peer relative localization with an Unmanned Ground Vehicle (UGV) equipped with four anchors and a UAV equipped with a tag. During the simulations, the authors concluded that the larger the UGV, and hence the distance between the anchors, the higher the expected accuracy will be. Interestingly, the z-axis error is lower in the simulations than the xy-plane error. The experimental results show that visual and IMU data are a viable option for localization during the first few seconds of a flight, before the UAV reaches a relatively high altitude, after which the UAV mostly relies on UWB technology for localization. The authors in [
56] mentioned that they plan to integrate UWB technology with the Global Navigation Satellite System (GNSS) in the future, which might lead to a more robust system with enhanced accuracy in determining the absolute location. Miranda et al. [
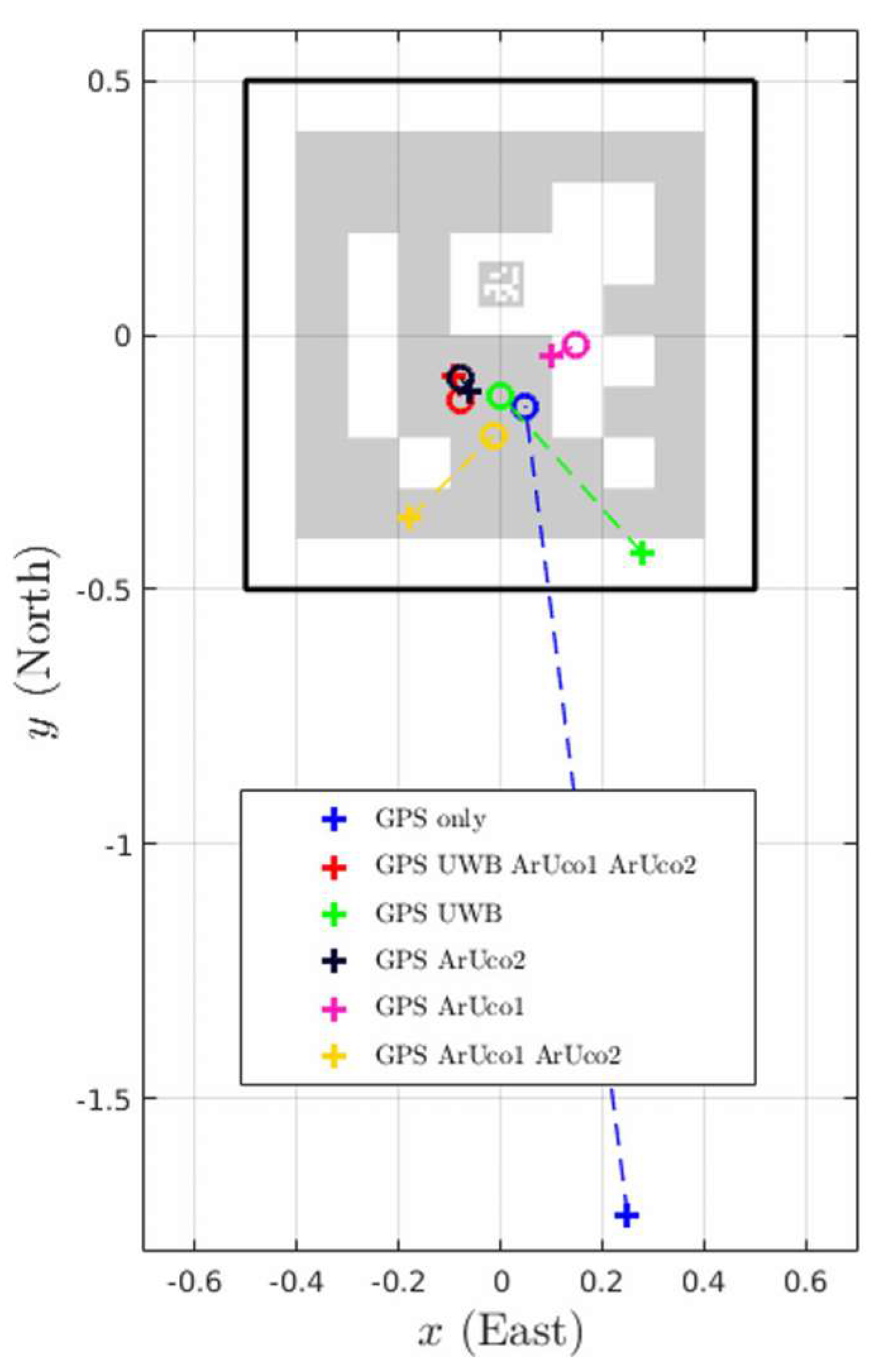
57] used UWB technology, IMU, and GPS to land a delivery UAV in a designated area. In this research, UWB technology is relegated to a supporting role in the landing phase as an aid to visual sensors in low-visibility situations, as the ArUco markers provide sufficient accuracy for landing on a 1 m × 1 m platform. The authors fused visual and UWB data using the EKF and obtained an average error of 11.4 cm.
Figure 4 shows the results obtained with different combinations of sensors [
57].
Pourjabar et al. [
58] proposed an infrastructure-free localization design that relies on a swarm of UAVs acting as UWB anchors to help other UAVs land in a desired space. They completed three main experiments: the ideal landing, the automatic landing, and the self-localization. In the first experiment, UAVs acting as anchors were manually placed in ideal positions to compare to other studies that use fixed anchors. The second experiment used automatic landing in which UAVs use IMU and optical flow data to navigate themselves from known positions to landing positions. In the third experiment, they implemented a self-localizing algorithm. In experiments with four UAVs performing landings, the ideal landing had the lowest error of 15.3 cm, while errors of the automatic landing and the self-localizing landing were 20 cm and 27.8 cm, respectively. These errors increase to 19.7 cm, 24.2 cm, and 36.4 cm when eight UAVs are used. This increase in error is likely due to the increased number of UWB messages needed for the TWR distance measurements. Self-localization, unfortunately, did not perform well and produced an average error of 38.2 cm.
Sorbelli and Pinotti [
59] tried to use range-free algorithms with Decawave’s hardware to localize a UWB transceiver on the ground. Unfortunately, the range-free algorithm relies on the perfect omnidirectionality of the antenna, which Decawave’s transceivers do not have. They also experimented with moving the UAV at a high speed of 5 m/s, which introduced additional errors. The result was an average error of 3 m during an indoor flight, which is not acceptable in most cases.
Niculescu et al. [
60] worked with nano UAVs capable of a rather limited flight time and presented an energy-efficient indoor UWB-based localization of nodes. They used a wake-up radio to activate the UWB transceiver on a UAV. The position estimation was done by trilateration with distances obtained at three different waypoints. The three waypoints used to measure distances were determined after the first distance measurement, which was not used for multilateration. These waypoints were the vertices of an equilateral triangle in which the initial measurement was marked as its centroid. This flight strategy produced a higher localization accuracy compared to random positions for distance measurements. The authors used the Vicon Vero 2.2 motion capture system, which produced locations of UAVs as ground truth and bound the maximum 3D localization error to 28 cm. They completed experiments with a different number of waypoints to see how the increased number of measurements impacts the localization accuracy and energy consumption. They concluded that three waypoints are accurate enough, even though more can be used if energy consumption is not an important factor. On the other hand, Martin et al. [
61] were dissatisfied with the hardware used in Niculescu et al. [
60], mostly due to their strict requirements for position accuracy due to the size of their landing pad. The authors concluded that IR cameras are a better solution for the autonomous landing of nano UAVs, as UWB technology often increases the error when transmitters are positioned closely.
4.3. Swarms of UAVs
Moon and Youn [
62] presented a UWB-based localization system where UWB anchors were placed on UAVs, making it a movable localization system. UAVs were equipped with the attitude and heading reference system (AHRS) because the authors planned to use heading and barometer information to obtain altitude information. They proposed a novel interacting multiple model (IMM) filtering, which is based on the EKF. The IMM performs slightly better than regular multilateration, with an additional delay due to the computational complexity of the algorithm.
Guler et al. [
63] proposed a localization method between two UAVs, one equipped with three UWB transceivers, acting like an anchor, and the other one equipped with one UWB transceiver, acting as a tag. They proposed a different filtering algorithm instead of the EKF because the EKF somewhat relies on the smooth change in speed of a UAV and needs an estimation of the initial state. The proposed algorithm is a mixture of Monte Carlo localization (MCL) algorithms, which combine both standard and dual MCL algorithms based on a probabilistic measure. The experiments were done indoors and outdoors with UAVs equipped with IMUs and LiDARs. UAVs were flying at constant heights and in the same heading. The average error for the mixture MCL algorithm was 1.87 m and 2.92 m for the indoor and outdoor measurements. This error could have originated from the short distance between UWB transceivers on an anchor UAV, as well as from the chosen algorithm.
Xu et al. [
64] presented a fully decentralized visual-inertial-UWB fusion framework for relative state estimation. Aside from the majority of studies, Nooploop UWB modules have a longer range and higher update rates, but the data rates are lower than Decawave’s UWB modules. Regarding UWB technology, the authors concluded that it helps during the initialization of state estimators. For all the state estimation systems, initialization is critical. The authors followed their research in [
65], where they presented a full-scale state estimation system consisting of wide-field-of-view stereo cameras, UWB transceivers, visual-inertial odometry (VIO), map-based localization, and visual drone tracking algorithms. They improved their initialization by using a multi-drone map-based localization, which also ensures the global consistency of the system. We can see that the authors continued to rely on UWB technology and claim that the system accuracy significantly improves with the usage of UWB technology.
Guo et al. [
66] proposed a relative localization as a distance-based method for UAV swarm formation control. The system uses PulseOn UWB modules, which rely on the DS-TWR for obtaining distance estimates. The authors successfully managed to maintain the equilateral triangle formation in a leader–follower technique, in which the leader UAV is manually controlled while other UAVs are automatically following it.
Zhao and Hooi [
67] presented a UWB system testbed. They fused IMU and UWB data, where the UWB data were obtained by using the TDoA method. The authors claim that their UWB-based system can operate at 500 Hz with a 2 cm ranging accuracy and 5 cm tracking accuracy. They conducted experiments in a 15 m × 12 m × 7 m area with 20 UWB anchors. During a five-minute hover test, the mean tracking error was 4.7 cm with a deviation of 3 cm. In a trajectory test, a UAV flew 11 rounds in an oval shape with a mean error of 3.3 cm and a deviation equal to 15 cm.
Wang and Deng [
68] focused on improving the initialization time of VIO-UWB systems for UAV swarms in GNSS-denied areas. The authors presented an algorithm that begins with VIO initialization, followed by selecting the appropriate time for initialization, choosing UWB anchor nodes, initializing UWB anchor nodes, and finally achieving global positioning. During the simulations, the authors obtained a RMSE of 0.52 m with an average required time of 3.5 s for swarms with sizes from 10 to 50 UAVs. Real-world experiments provided slightly worse results than the existing algorithms, but they do provide a solution over a second faster. The presented algorithm also requires a high level of clock synchronization.
Yang and Lee [
69] used UWB technology as an aid to the GNSS/IMU localization system. They presented an algorithm based on GNSS and IMU and used UWB measurements when they were available. The authors simplified the EKF with minimal losses to reduce its computational complexity. The simulation provided positive results with an average error of 0.56 m compared to the 1.43 m obtained by using only GNSS/IMU. As can be seen in
Figure 5, errors are the highest in the early stage of the flight. According to our literature review, the authors are the first to use Decawave’s DWM3000 transceiver for UAV localization. DWM1000s’ successor struggles with sudden excessive errors, which creates a need for an outlier rejection algorithm.
Zhang et al. [
70] tried to improve the accuracy of the BeiDou satellite navigation system for UAV swarm control by aiding it with barometers and UWB transceivers. Bayesian probability fusion is used for BeiDou and barometer data, which was later fused with the UWB data by a gradient descent optimization algorithm. The authors tested the algorithm on a swarm of four UAVs and obtained better results than by using BeiDou solely. However, the result of it is a RMSE larger than 1 m, which is dangerous and unsuitable for a close formation flight. The authors could investigate using an IMU as well to obtain better results, similarly to the authors in [
69].
Shan et al. [
71] used UWB ranging as a collision avoidance mechanism for a swarm of UAVs. During an evaluation of the ranging period’s effect on accuracy, the authors concluded that the ranging period does not affect the ranging accuracy. However, this is only true for ranging between static transceivers, as the authors noticed a higher average error with a larger ranging period during an experiment in which one UAV flies towards another UAV. They conducted an experiment with eight hovering UAVs at a one-meter height and a manually controlled UAV in a 3 m × 3 m × 2 m area. When the distance between the two UAVs is below the threshold, in this case, 30 cm, the hovering UAV will lower its altitude until the other UAV moves away.
Gu et al. [
72] presented an interesting approach to UWB-based localization by using a UWB antenna array for measuring both the distance and the angle between two UAVs. This way of localization is greatly impacted by the surrounding terrain. To combat this, the authors carefully chose their flight path and claimed that an increase in speed leads to a decrease in positioning accuracy, but at a speed of 0.64 m/s, an accuracy of around 23 cm can still be guaranteed, which is a very good result.
4.4. Localization of UAVs with Static Anchors
You et al. [
9] used IMU with UWB technology in a 3 m × 2.5 m × 2.4 m room. They based the sensor fusion on the UKF and succeeded in reducing the IMU’s biggest issue, which is the accumulated error. IMU tends to accumulate errors over time, which makes it unreliable if used as the only sensor for prolonged localization. The authors took advantage of DWM1000’s high-ranging rate and used the average of 50 consecutive measurements as a distance measurement fed to the UKF.
Lin et al. [
35] proposed a system that includes indoor mapping, localization, and path planning with obstacle avoidance. In the multi-sensor fusion, the authors used UWB, QVIO, AprilTag, and RTAB-Map SLAM and conducted experiments in 8 m × 7 m × 2.5 m at the same altitude, solving a 2D problem. The study highlights UWB technology’s advantage in situations where visual sensors face a textureless surface or a white wall.
Zahran et al. [
73] decided to fuse UWB technology and a monocular camera with the IMU to remove the IMU’s error drift. When using the IMU only, the authors obtained errors in a range of a few hundred meters during a 60 s flight.
Figure 6 shows how the authors, by using a UWB-based system with six anchors, obtained an average error of 1.4 m during a 180 s flight. They also tried to use the camera alone as an aiding system for the IMU, but the results were poor. The authors used the ToF instead of the DS-TWR, which could be the reason for higher errors than other studies, especially since the authors looked at the error in a 2D plane.
In the DS-TWR, the time-of-flight
tof (3), as a parameter to measure the distance from a UAV to each anchor, is calculated using the specific times from sending a poll message to receiving a report, shown in
Figure 7.
Ching et al. [
74] used a UAV to find unhealthy plants in an indoor garden. UWB technology was a primary localization technology aided by IMU. As shown in
Figure 8, the system consists of four anchors placed at known locations, and position estimation is done by multilateration using the EKF. The largest error occurs when the UAV is taking a sharp turn. It is worth mentioning that anchors are at the same height and are not placed optimally as a part of the predetermined flight path is out of the square area between the anchors, as shown in
Figure 8.
Hashim et al. [
75] presented a nonlinear observer for inertial navigation using IMU and UWB data. The authors used the data obtained in [
76] for their simulation, and the observer successfully estimated the UAV’s orientation, position, and linear velocity.
Yang et al. [
77] tackled an issue of anchor deployment strategy in confined spaces. They used the DS-TWR in a 1.2 m × 3.2 m × 2.6 m space with Pozyx UWB hardware. From the results of this work, it can be concluded that the anchors should not be placed collinearly, which corresponds well with the theory. The baseline strategy is to place the two anchors near the wall, the third anchor near the opposite side wall, and the fourth on one of the unused walls near the corner of the room. Small variations in the height of the third anchor and the position of the fourth anchor enable users to adapt to certain missions. In the rooms with square-shaped floor plans, the best option is to place the anchors in the four corners of the room, while for rectangular rooms, where one dimension is significantly larger, it is better to have the anchor(s) placed closer to the center of the room. It should be noted that the differences between these placement strategies are minimal.
Suh et al. [
78] presented a passive localization system consisting of a UWB transmitter and a cruciform antenna array on the UAV, which enables TDoA measurements. The authors claim that the simulations produced a RMSE of 0.35 m, and experiments with real hardware provided similar results as the simulation. They did not mention the exact hardware used, in terms of the UWB transceiver as well as the antennas on the UAV. These results were obtained in static environments, and it would be interesting to see if this approach can provide accurate positioning estimation for a moving UAV.
Nattke et al. [
79] compared the simulated accuracies of UWB and GNSS sensors in agriculture. The authors also used a single UWB transceiver on both UAVs and eventually ended with a large error of 2.44 m, which is still better than the 3 m error obtained by the combination of GPS and Galileo.
4.5. Deep Learning-Based Localization
Kao et al. [
80] presented a novel approach that relies on the fusion of deep learning to aid VIO (visual-inertial odometry) and UWB technology. The UWB model does a simple trilateration but can learn the UWB measurement bias. The authors used a public dataset for the VIO, and since the set did not contain UWB-based measurements, they added the distances from target to anchors, containing Gaussian noise with standard deviation
σ, to each individual distance and concluded that adding UWB-based distance measurements improves the performance of global pose estimation significantly. Although the orientation is not observable in the UWB system, it helps VIO to learn and better predict the global rotation.
Poulose and Han [
81] approached UWB-based localization uncertainties by using deep learning long short-term memory networks for predicting the user’s position. The authors used simulated ToF measurements for training and evaluating the network. They concluded that from the simulation results, the proposed method shows reasonable position estimation results for UWB-based indoor localization and that the proposed approach solved the LOS problems associated with the UWB system and gave better localization accuracy than conventional localization approaches.
Sang et al. [
82] used machine learning to recognize multipath, NLOS, and LOS UWB signals. Since the accuracy of UWB measurements is influenced by the mentioned signal propagation effects, knowing them can help mitigate errors. The authors used a dataset obtained from a real-world environment with the following features: measured distance, compound amplitudes of multiple harmonics in the first-path (FP) signal, amplitude of the first, second, and third harmonics in the FP signal, amplitude of a channel impulse response, the preamble accumulation count reported in the DWM1000 chip module, the estimated FP power level, the estimated RX power level, and the standard and maximum noise in the DWM1000 chip module. The overall recognition accuracy was 91.9% in the best-case scenario and 72.9% in the worst-case scenario.
Jia et al. [
83] presented a composite filtering approach for TDoA UWB measurements. The authors point out UWB technology’s benefits in indoor localization, such as low-light requirements and strong penetration capability, which is important for low-visibility conditions. They used 12 anchors and a moving tag for data collection and focused their research on filtering out UWB noise and wind disturbance. Similar to [
82], the authors in this work focused on NLOS and multipath conditions as the main source of UWB noise. Aside from recognizing NLOS and multipath conditions, the authors in this study implemented an algorithm that successfully reduced the obtained error.
González-Castaño et al. [
84] presented a self-corrective approach for a VIO/UWB localization system. This approach uses independent KF of UWB data, filtering UWB noise at stopping points and VIO-based correction of filtered UWB data. By ensuring a quality background for VIO and optimal anchor placement in the experiment, the authors obtained an average error of 6 cm during their flight.
Pfeiffer et al. [
85] presented the moving horizon estimation (MHE) algorithm as a substitute for the EKF in UWB-based UAV localization. The MHE slightly outperforms the EKF but uses more computational power, keeping the EKF as the favored choice. Dong et al. [
86] decided to improve upon the EKF, mostly in NLOS conditions. They achieved so by introducing an improved robust adaptive cubature Kalman Filter, which is capable of recognizing NLOS conditions, thus improving the provided accuracy.
5. Various Applications of UWB in UAVs and Their Restrictions
In the previous section, we discussed the usage of UWB technology in short-distance localization systems. However, there are various possibilities to use UWB equipment, besides obtaining sole information about the relative position.
5.1. Jamming of UAVs
Šimon and Götthans [
87] made an overview of the usage of deep learning techniques for UAV jamming and deception. They showed that a UWB signal can be jammed, but the system would require a high-power level because of the wideband property of the signal. UWB-based jamming can be successful against spread-spectrum signals, e.g., Frequency-Hopping Spread-Spectrum (FHSS) or Direct-Sequence Spread-Spectrum (DSSS).
Li et al. [
88] presented the possibility of using UWB technology as a jamming tool for UAV control. The authors used a UWB electromagnetic pulse (EMP) generator and transmitted signals of varying power toward a UAV. With enough power, the authors managed to interfere with the UAV’s RF front end, making it lose the reception of a GPS signal. The main goal of this disturbance was to initiate the UAV’s automatic hover or landing function when a GPS signal becomes unavailable. Sakharov et al. [
89] proved that the UWB EMP really is harmful to commercial drones because it disables the communication between the remote controller and the UAV. The limitation is, as expected, the required transmission power, where the authors claim that an E-field above 50 V/m is effective.
In NLOS environments, Vidan et al. [
90] questioned the reliability and robustness of UWB technology. They conducted an experiment in an indoor space and used the TWR for distance estimation, as well as measuring the RSSI. The RSSI can be calculated by the Friis formula in a free-space model, but the true RSSI is heavily influenced by refraction, diffusion, absorption, and reflection. The experimental results lead to the conclusion that the DWM1000 transceivers are unreliable in complete NLOS conditions. This problem can be solved by optimizing the anchor setup to reduce the area where less than four anchors are visible to the UAV.
5.2. Augmentation of Satellite Navigation Systems with UWB Technology
Besides the usage of UWB technology in indoor applications and, generally, all GNSS-denied environments, there are some examples of combining it with GPS, e.g., Gao et al. [
16] and Zabalegui et al. [
17], who are frontrunners in the augmentation of GPS using UWB technology, describe this as a good match since GPS has an unlimited range and low accuracy, while UWB transceivers have limited range and provide high accuracy measurements. Both studies are focused on ground vehicles for the simplicity of conducting experiments rather than UAVs. The authors in [
16] used the Thales UWB system, while the authors in [
17] used DWM1000 transceivers from Decawave. The conclusion from both groups is that the use of UWB technology in urban environments is a reliable option when trying to solve the main drawback of GNSS in low-visibility scenarios, indoor environments, and even outdoor–indoor transitions, which is sub-meter accuracy. These papers are very recent, both from 2023, and lay the foundation of GNSS augmentation using UWB technology in partially obstructed GNSS areas, which could prove useful for UAVs as well.
Huang et al. [
91] proved that multi-GNSS/UWB integration can significantly improve positioning performance in terms of positioning accuracy and convergence time. Their results show that this approach is very promising since they achieved an accuracy of under 10 cm. Similar results were achieved by Wang et al. [
92], where the authors proposed GNSS Real-Time Kinematic (RTK)/UWB/Differential Barometric Altimeter (DBA) fusion as a positioning method and achieved a positioning accuracy of under 5 cm in northing, easing, and altitude.
5.3. Indoor and Surveillance Applications
As we mentioned before, time synchronization is essential for implementing UWB-based localization. Sharma et al. [
93] presented a UWB localization system with a cloud-based control architecture. The authors used eight anchors in a 5.5 m × 6.7 m × 3 m space and experimented with one to four UAVs and the TDoA method for distance estimation. This system offered a simple way of providing a user with the control of UAVs via a mobile application connected to the cloud. Unfortunately, this feature comes at the cost of increased latency, which can hinder the performance of the system. An accuracy of 5 cm was achieved in the experiment where the UAV took off and did two circles before landing on the initial take-off spot with a speed of 0.6 m/s. The measured latency ranges from 0.8 to 1.4 s, which needs to be improved in the future.
The authors in [
94] focused on the TDoA as a preferred distance estimation method over the DS-TWR, arguing that the DS-TWR is not scalable and reliable due to the need for exchanging multiple packets, which may take too long or use too much bandwidth. One reason to use the TDoA instead of the DS-TWR is the fact that the TDoA can estimate a position from one information packet, making it immune to the UAV’s movement, which is positively correlated to the reduction of the error in position estimation. They used four anchors connected by wire to secure synchronization and obtained an average error smaller than 10 cm in the simulation with little added noise.
Gerwen et al. [
95] decided to analyze which sensors are best suited to which UAVs, respective to their size. They also compared the accuracy obtained by different numbers of used anchors. The sensors authors experimented with included UWB transceivers, simultaneous localization and mapping (SLAM) cameras, sonar, and ArUco markers. For small UAVs, the authors compared only UWB technology and UWB technology aided by sonar. Using the TWR for distance measurements and a motion capture system to provide the ground truth, the authors obtained an average positioning error of 67 cm in 3D. The main reason for the magnitude of this error was that the UWB anchors in the test area could not be differentiated in the z-axis due to the limited ceiling height. By adding an inexpensive altitude sonar, the average error dropped to 10.71 cm. For medium-sized UAVs, SLAM cameras can be used with either UWB transceivers or ArUco markers to obtain a similar level of accuracy, with a small difference in cost. Lastly, for large UAVs, a fusion of UWB technology, SLAM cameras, and ArUco markers provides the best results and has a similar cost to other sensor permutations.
Table 2 provides the positioning error achieved by using a different number of UWB anchors. Adding anchors after the third one increases the accuracy only by a little, but it is worth mentioning that the financial cost of adding a fourth anchor is negligible compared to the much-needed redundancy in a localization system. This provides good guidelines for designing closed indoor spaces, e.g., warehouses, with UAV-based surveillance systems.
Queralta et al. [
96] used UWB technology as an alternate localization system in GNSS-denied environments. Although the Decawave system offers a function to auto-position up to four anchors, the authors were dissatisfied with the accuracy and time needed for auto-positioning. They tried to improve the auto-positioning method by adding additional UWB transceivers on each anchor to create a portable, inexpensive, and battery-powered localization system for UAVs. Their auto-positioning method provided accurate results with errors of up to 7 cm with a standard deviation of 4 cm. Aside from this, the authors conducted experiments with different numbers of anchors and their formations to obtain the highest accuracy possible. They reduced the z-axis error by using a LiDAR on the UAV and advised the usage of UWB tags positioned close to the center of mass of the anchor system. The relative position of the UAV against the anchors results in a change in the expected localization accuracy, which corresponds well to the dilution of precision (DOP) diagram, as in [
97].
Macoir et al. [
98] placed their focus on reducing the necessary power requirements for large-scale UWB localization systems for tracking athletes in indoor sporting halls. Before tracking athletes, the authors decided to track a UAV in a smaller indoor environment. An additional radio was used to wake up UWB anchors from their low-power mode when a UAV was nearby. In this way, the authors obtained the average required current of 27 mA compared to the 130 mA needed for a traditional UWB module. An average power consumption is influenced by the amount of time a UWB is active and, as such, is heavily reliant on the placement of UWB anchors. They decided that the DS-TWR is better suited for their UWB module than the TDoA.
Lee et al. [
99] used Wi-Fi to reduce the number of control and report messages, thus reducing the UWB traffic. Their study contains several experiment scenarios, ranging between two nodes, three nodes, five nodes in 3D, and one mobile ranging node to multiple ranging nodes in 2D and 3D, all with satisfactory results. The authors decided to use the DS-TWR and conducted each experiment 1000 times to obtain a large amount of measurement data. The largest error in positioning occurred in the last experiment, in which all four nodes were moving in 3D space. The trajectories were predefined and used as ground truth. Node 1 had an average distance error of 16.08 cm during movement, and the standard deviation of error data was 9.46 cm; node 2 had an average positioning error of 11.57 cm with a standard deviation of 4.58 cm; node 3 had an average positioning error of 6.81 cm with a standard deviation of 5.11 cm; and node 4 had an average positioning error of 9.03 cm with a standard deviation of 6.86 cm. These errors were influenced by the selected trajectories, with the main factor being that nodes 1 and 2 changed their height during the experiment. They decided to determine the positioning delay of their ranging module by using a UAV equipped with it, surrounded by four UWB transceivers acting as anchors. The obtained positioning delay of 28 ms is significantly lower than the declared delay of 60 ms by the UWB transceiver manufacturer, Decawave.
Steup et al. [
100] were particularly dissatisfied with their GPS readings, claiming a deviation of typically ±40 m in the GPS position, even though they received data from at least five satellites in 99.9% of the data points. They first tested the positioning accuracy of the UWB-based system indoors, in a 3 m × 3 m × 3 m room with eight anchors placed in all eight corners, and a moving tag was placed on the end of a wooden stick. The ground truth was obtained by the Optitrack system’s motion tracking system, and the error in positioning was mostly under 25 cm, with the largest error in the direction of the z-axis.
Currently, there are not many researchers dealing with the usage of a large number of UAVs in indoor spaces. One of the examples is [
101], where the authors have set up a large-scale simulation in Matlab, which simulates an indoor space of 100 m × 100 m × 50 m, featuring 200 randomly placed UWB anchors with unknown positions and 10 UAVs equipped with UWB tags and IMUs. The goal of this study was for UAVs to localize the anchors quickly and precisely so that they could be used for UAV localization. While localizing the anchors, UAVs rely on IMUs to provide them with accurate positions. This period is very important because an IMU tends to accumulate significant errors over an extended period. The authors simulated a large indoor arena, which presumably represented a warehouse or a large storage area, which is expected to have plenty of objects within it. They placed all the anchors on the ground while the simulated space was 50 m high, which should have increased the error in the direction of the z-axis without a visual sensor providing height information, but that did not affect the simulation results.
A more detailed overview of the indoor positioning systems for UAV localization can be found in [
102].
6. Conclusions
In this paper, we tried to thoroughly examine the various short-distance localization methods and sensors used in UAVs with an emphasis on UWB technology-based localization. The literature sources used in the survey were chosen in a way to represent the latest achievements of relative and short-distance localization of UAVs and mainly consisted of research conducted within 5 years prior to writing this survey. The aspects covered by the survey are the types of short-distance sensors used for the relative localization of UAVs, the advantages and disadvantages of the methods for estimation of UAV location, mostly based on UWB transceivers, as well as the current limitations in available hardware. From the survey, a potential researcher will be able to determine the key factors influencing UWB technology’s performance as a data exchange method, primarily by including anchor placement, environmental constraints, and the growing emphasis on different approaches in multi-sensor fusion to enhance localization accuracy and reliability. Some researchers based their work on implementing an accurate position estimate by exploring the UWB signal properties. In contrast, others used different system setups to measure the propagation time between transceivers, and some were focused on the integration of sensory data to provide autonomous localization and flight.
With regards to the choice of distance estimation, the most used approaches are based on the time of arrival (ToA), the time difference of arrival (TDoA), and the double-sided two-way ranging (DS-TWR). The results of the distance estimation are usually combined with complementary sensors, such as IMUs, visual systems, and altitude sensors, using different state estimation algorithms.
Hardware-wise, most of the recent research in UWB localization relies on the usage of the DWM1000 UWB module, which is compact, inexpensive, and provides accurate distance measurements. Among the measurement methods in the process of obtaining the UAV’s location, the TWR and the DS-TWR are the most used due to their simplicity and suitability for applications without the need for mutual anchor synchronization. In the future, if UWB technology is to be used in large swarms, the TDoA would be the method of choice, as it requires an exchange of fewer message packets to estimate the position.
The recent advancements in nonlinear filtering for using mutual UAV sensor information further improved the accuracy of location estimation. For the beginning of the second decade of the 21st century, we can confidently say that the expected accuracy of the UWB-based localization of UAVs lies between 10 cm and 30 cm and, with the aid of other sensors, these results can be slightly improved, but the research community did not yet reach centimeter-level precision. IMU integration, or at least the use of an altitude sensor, has proven essential in compensating for UWB technology’s limitations and enables a robust performance across dynamic environments.
In swarm control, UWB technology is used for UAVs to establish relative positions within a swarm by continuously exchanging DS-TWR signals. The usually fixed anchors in swarm applications are sometimes mobile themselves and are mounted on leader UAVs to provide a reference frame for the entire swarm. Technically, UWB technology has the possibility to function somewhat in NLOS and multipath environments, which makes it a valuable substitute in GPS-denied environments. This property allows precise navigation, even in complex environments like warehouses, factories, or urban indoor spaces, e.g., parking garages, for surveillance purposes.
Over the years, UWB technology has transitioned from experimental research to practical, widely adopted solutions. In this paper, we tried to provide information about the possible applications in UAV swarms, indoor localization, and autonomous landing by highlighting its versatility and adaptability. The key objectives in the design of a system, such as proper anchor placement, remain critical, particularly in cluttered or challenging environments. As sensor fusion algorithms continue to improve, UWB technology’s integration into a multi-sensor fusion framework enhances its accuracy and reliability, particularly for high-stakes tasks such as collision avoidance and complex swarm operations. We can conclude that UWB technology has established itself as an important short-distance localization technology for UAVs, offering precise, robust, and scalable solutions that address the limitations of other localization methods. Its continuous advancement, driven by innovative research and improved hardware, ensures its relevance and effectiveness in the rapidly evolving field of UAV applications.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}